Embed Size (px)
Citation preview
1Modelagem e Controle de Sistemas a Eventos Discretos
1. Introdução: Sistemas e Modelos
Sistema: Conceito primitivo (intuitivo)
Tentativas de definição:
•Agregação ou montagem de coisas, combinadas pelo homem ou pela natureza de modo a formar um todo unificado.
•Grupo de itens interdependente ou interagindo regularmente,formando um todo unificado.
•Combinação de componentes que agem em conjunto para desempenhar uma função que se torna impossível na ausên-cia de qualquer das partes.
Modelo:
Dispositivo que de alguma maneiradescreve o comportamento do sistema

2Modelagem e Controle de Sistemas a Eventos Discretos
1. Introdução: Sistemas e Modelos
Em geral definimos para o modelo: •Variáveis de entrada;•Variáveis de saída;
que espelham as interações do sistema com o Universo
sistema
entr
adas saíd
as
Espera-se do modelo estabelecer relações entre estas variáveis. Para certa classe de sistemas é conveniente o seguinte modelo:
modelo
variá
veis
de
entr
ada variáveis
de saíd
a
u(t) y(t)
y(t) = g(u(t))

3Modelagem e Controle de Sistemas a Eventos Discretos
1. Introdução: Sistemas e Modelos
Exemplo:
Os modelos de sistemas podem ser classificados sob vários cortes:
•Físicos ou Matemáticos•Estáticos ou Dinâmicos•Lineares ou Não-lineares•Variante ou Invariante no tempo•Analíticos ou Numéricos
O exemplo acima é um modelo matemático, estático, linear, invariante no tempo e analítico de um circuito elétrico.
R
ru(t)
+
−)t(u
rR
R)t(y
+=
4Modelagem e Controle de Sistemas a Eventos Discretos
1. Introdução: Sistemas e Modelos
Modelos dinâmicos × Modelos estáticos
Um modelo é dinâmico se o valores das saídas dependem de valores passados das entradas
Modelos invariantes no tempo × Modelos variantes no tempo
y(t) = g(u(t)) ou y(t) = g(u(t),t)
Estado: é a informação necessária num instante de tempo para se prever a saída futura do sistema, caso os valores futuros das variáveis de entrada sejam conhecidos.
x = f(x,u,t)y = g(x,u,t)
⋅⋅⋅⋅
Para uma certa classe de sistemas, o estado pode ser representado por um vetor x(t) e o modelo fica:

5Modelagem e Controle de Sistemas a Eventos Discretos
1. Introdução: Sistemas e Modelos
Exemplo:
R
Cu(t)
+
−)t(v)t(u)t(y c−=
uRC
1v
RC
1v cc +−=&
Este é um exemplo de um modelo matemático, dinâmico, linear, invariante no tempo e analítico de um circuito elétrico.
Modelos lineares × Modelos não-lineares
Um modelo é linear se o princípio da superposição se aplica:
Um sistema modelado pelas funções f e g será linear sse as funções f e g forem lineares.
entrada saídau1 y1
u2 y2
αu1 + βu2 αy1 + βy2

6Modelagem e Controle de Sistemas a Eventos Discretos
1. Introdução: Sistemas e Modelos
Espaço de Estados
Nos exemplos anteriores o estado assume valores num sub-conjunto de Rn:espaço de estados
Em sistemas físicos o estado está associado ao armazenamento de energia.
Contudo o conceito de estado é mais geral: A informação que sintetiza o passado do sistema pode ser expressa de outras maneiras.
x ∈ Z x ∈ {0,1}x ∈ {a, b, c, d, e} x ∈ {0,1} × Nn • • •
Modelos com espaço de estado contínuo×
Modelos com espaço de estado discreto
Portanto pode-se classificar os modelos segundo:
Exemplos:

7Modelagem e Controle de Sistemas a Eventos Discretos
1. Introdução: Sistemas e Modelos
Exemplo: Sistema de estocagem
chegada de produtos
saída de produtos
u1(t) = num. deitens que entraram
u2(t) = num. de itens que saíram
x(t) = num. de itens em estoque
0)t(u)t(u)t(x)t(y 21 ≥−==
As variáveis envolvidas no exemplo anterior podem ser determinísticasou estocásticas, portanto pode-se ainda distinguir:
Modelos determinísticos × Modelos estocásticos
Esta distinção será explorada num próximo capítulo

8Modelagem e Controle de Sistemas a Eventos Discretos
1. Introdução: Sistemas e Modelos
Finalmente pode-se distinguir entre:
Modelos dirigidos pelo tempo×
Modelos dirigidos pela ocorrência de eventos
Um modelo com espaço de estados contínuo cujas trajetórias no espaço de estado sejam contínuas tem sua dinâmica naturalmente dirigida pelo tempo.
•conceito primitivo•sem duração•altera o estado
Usualmente, a formulação matemática deste tipo de modelo envolveequações diferenciais
obs.: num modelo dirigido pela ocorrência de eventos o estado só muda quando ocorre um evento
evento:

9Modelagem e Controle de Sistemas a Eventos Discretos
1. Introdução: Sistemas e Modelos
Um modelo com espaço de estados discreto pode apresentar:
•dinâmica dirigida pelo tempo eventos ocorrem sincronizados por um relógio.
•dinâmica dirigida pela ocorrência de eventos eventos ocorrem assíncrona e concorrentemente
A ausência de paradigmas para a modelagem dos Sistemas Dinâmicos aEventos Discretosfaz da simulaçãouma importante ferramenta para seu estudo
Não há paradigma formal para os modelos com espaço de estados discretocom dinâmica dirigida pela ocorrência de eventos
Os sistemas a que se referem estes modelos são chamados de SistemasDinâmicos a Eventos Discretos

10Modelagem e Controle de Sistemas a Eventos Discretos
1. Introdução: Sistemas e Modelos
modelos
estáticos dinâmicos
variantes no tempo invariantes no tempo
lineares não-lineares
estado contínuo
tempo discreto
dirigidos pelo tempo dirigidos por eventos
determinísticos estocásticos
tempo contínuo
estado discreto
Siste
mas
Din
âmico
s a
Even
tos D
iscre
tos
11Modelagem e Controle de Sistemas a Eventos Discretos
1. Introdução: Sistemas e Modelos
Características dos Sistemas Dinâmicos a Eventos Discretos: •Espaços de estado discretos
•Dinâmica dirigida pela ocorrência de eventos•Sincronismo•Concorrência
As seguintes associações são comuns na literatura:
•Dinâmica Contínua Natureza(existência de leis de conservação)
•Dinâmica Discreta Sistemas construídos pelo Homem(interface com seres humanos, explosão combinatorial)
Níveis de Abstração: •não-temporizado ou lógico•temporizado•temporizado estocástico

12Modelagem e Controle de Sistemas a Eventos Discretos
1. Introdução: Sistemas e Modelos
A cada nível se associa uma “linguagem”:
e1, e2, e3, ...(e1,t1), (e2,t2), (e3,t3), ...
(e1, p(t1)), (e2, p(t2)), (e3, p(t3)), ...
Formalismospara a modelagem de SED’s constituem representações destas linguagens, caracterizados por:
•destacar as informações estruturais sobre o sistema;
•permitir a manipulação do modelo visando análise (p.ex. verificação)e síntese (p.ex. de controladores).
São formalismos importantes:•autômatos•redes de Petri

13Modelagem e Controle de Sistemas a Eventos Discretos
1. Introdução: Sistemas e Modelos
Estes formalismos tem em comum representar linguagens pela estrutura de transição de estado (que eventos podem ocorrer num dado estado)
Diferem pela forma como representam os estados
Para o problema de simulação, vamos nos concentrar nos autômatos em suas versões:
♦determinística ♦ temporizada ♦ estocástica
Segundo Yu Chi Ho, são características desejáveis para os modelos para Sistemas a Eventos Discretos:
•Natureza descontínua dos estados;•Natureza contínua das medidas de desempenho;•Importância da formulação probabilística;•Necessidade de análise hierárquica;•Presença de dinâmica;•Realizabilidade do esforço computacional

14Modelagem e Controle de Sistemas a Eventos Discretos
1. Introdução: Sistemas e Modelos
Classificação dos modelos para SDED’s:
temporizados não temporizados
Lógicos Lógica Temporal; Máq. de Estados Finitos;Redes de Petri Redes de Petritemporizadas
Algébricos Álgebra Min-max Processos FinitamenteRecursivos;Processo de Comunica-ção sequencial
Desempenho Cadeias de Markov;Redes de Filas;GSMP;Simulação
estocásticos determinísticos
15Modelagem e Controle de Sistemas a Eventos Discretos
1. Introdução: Sistemas e Modelos
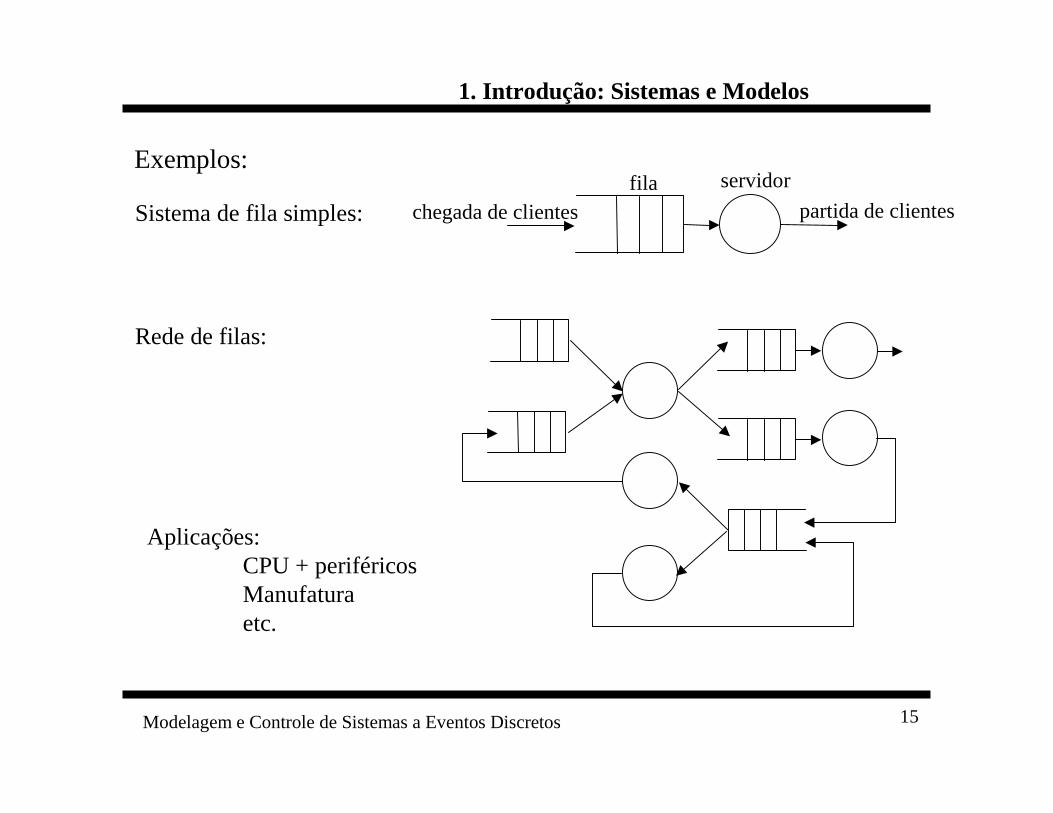
chegada de clientes partida de clientesfila servidor
Exemplos:
Sistema de fila simples:
Rede de filas:
Aplicações:CPU + periféricosManufaturaetc.
16Modelagem e Controle de Sistemas a Eventos Discretos
1. Introdução: Sistemas e Modelos
Nota histórica:
•A História da Engenharia sempre foi marcada pelo paradigma de sistemas contínuos
•Contudo, as equações diferenciais se mostraram insuficientes para a mode-lagem de certos problemas
•Tradicionalmente estes problemas foram tratados através de heurísticas e simulação
•A importância destes problemas aumentou nas últimas décadas
•Cenário hoje se caracteriza por um esforço para o desenvolvimento de ferramentas formais mais adequadas
17Modelagem e Controle de Sistemas a Eventos Discretos
1. Introdução: Sistemas e Modelos
Segundo Thomas Khun, a História da Ciência é marcada por criação, arti-culação e quebra de paradigmas, após as quais se verifica:•inexistência de consenso;•diversidade de abordagens
A possibilidades com a articulação de novos paradigmas incluem:•consenso;•áreas de pesquisa “irreconciliáveis”
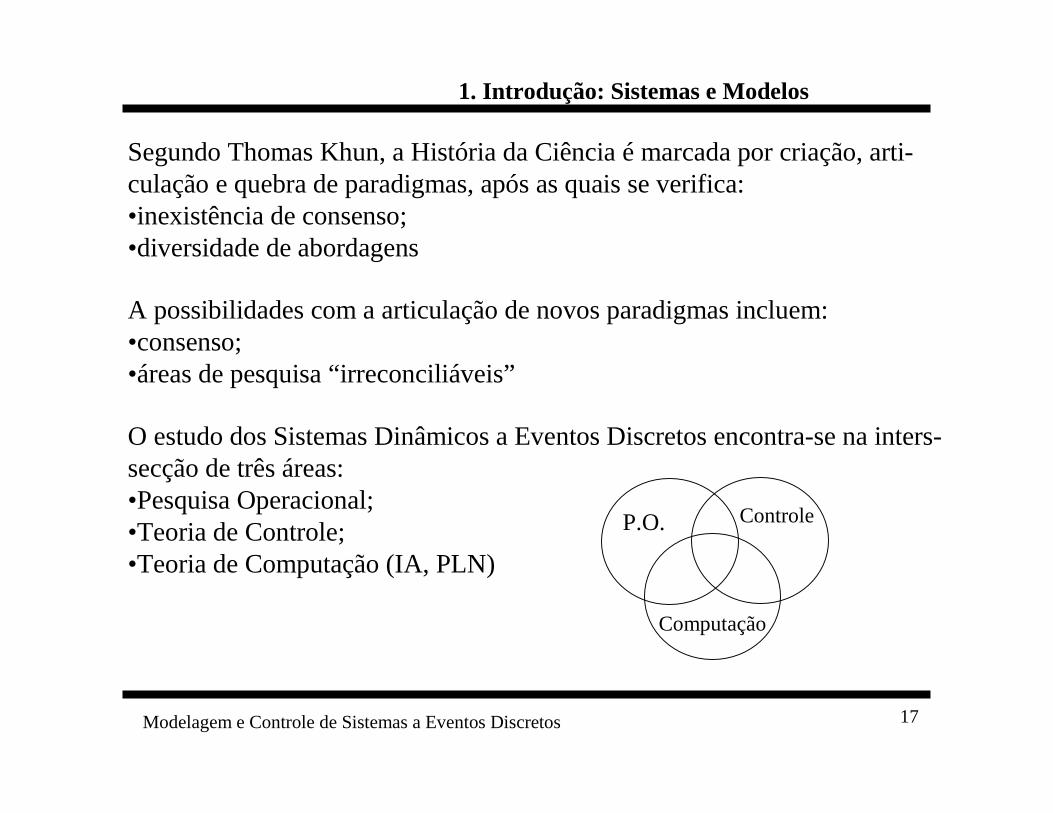
O estudo dos Sistemas Dinâmicos a Eventos Discretos encontra-se na inters-secção de três áreas:•Pesquisa Operacional;•Teoria de Controle;•Teoria de Computação (IA, PLN)
P.O. Controle
Computação

18Modelagem e Controle de Sistemas a Eventos Discretos
1. Introdução: Sistemas e Modelos
Máquina 1 Máquina 2Buffer
SuprimentoInfinito de Peças Saída de Peças
Consideremos o exemplo simples a seguir:
a = tempo de serviço na máq. 1b = tempo de serviço na máq. 2a > b (o sistema é estável)xn = instante do n-ésimo final de serviço da máquina 1yn = instante do n-ésimo final de serviço da máquina 2x0 e y0 são instantes conhecidos (sem perda de generalidade, pode-se assumir que x0 = 0)

19Modelagem e Controle de Sistemas a Eventos Discretos
1. Introdução: Sistemas e Modelos
É fácil provar que a "soma" é comutativa e associativa e que o "produto"é distributivo em relação à "soma". Além disso, a soma satisfaz à propri-edade da idempotencia, ou seja, a ⊕ a = a.
x1 = x0 + ax2 = x1 + ay1 = max{y0 + b , x1 + b}
a ⊕ b = max{a,b}a ⊗ b = a + b
Tem-se:
A álgebra max-plus proporciona uma maneira simples de equacionar aevolução do sistema. Define-se:
20Modelagem e Controle de Sistemas a Eventos Discretos
1. Introdução: Sistemas e Modelos
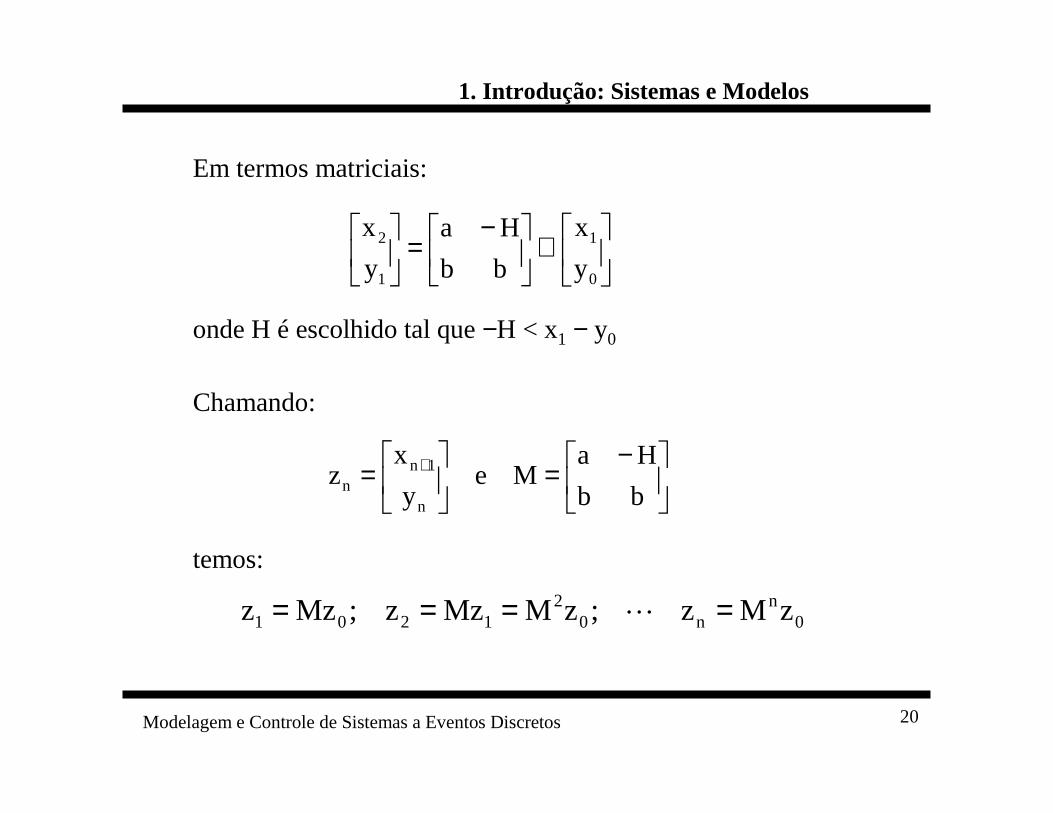
Em termos matriciais:
⊗
−=
0
1
1
2
y
x
bb
Ha
y
x
onde H é escolhido tal que−H < x1 − y0
Chamando:
−=
= +
bb
HaMe
y
xz
n
1nn
temos:
0n
n02
1201 zMz;zMMzz;Mzz ==== L

21Modelagem e Controle de Sistemas a Eventos Discretos
1. Introdução: Sistemas e Modelos
Para o cálculo da matriz Mn definimos:
c = a − bJ = H + a
e concluímos que:
Kacc
J0aM ⊗=
−−−
⊗=
Portanto:
nnnn K)na(KaM ⊗=⊗=
−−⊕−−−
=)cJ()nc(c
J0K n
Pode-se mostrar que:

22Modelagem e Controle de Sistemas a Eventos Discretos
1. Introdução: Sistemas e Modelos
>−
−−−−
<−
−−−
=
Jc)1n(secJc
J0
Jc)1n(sencc
J0
K n
−−−−
==cJc
J0PK n
ou, equivalentemente:
Portanto, para n suficientemente grande:
Observa-se que P é independente de n, o que denota a entrada do sistema em regime permanente.

23Modelagem e Controle de Sistemas a Eventos Discretos
1. Introdução: Sistemas e Modelos
Fazendo as substituições adequadas, concluímos:
=⊗⊗⊗=
b
azPcomzP)na(z 00n
++
=
= +
bna
a)1n(
y
xz
n
1nn
e, finalmente:
que é a solução em regime previsível.
a a a a a
y0x1 x2 x3 x4 tempo
a
b b b b b
y1 y2 y3y4
x5
y5
x0
24Modelagem e Controle de Sistemas a Eventos Discretos
1. Introdução: Sistemas e Modelos
Conclusão: alguns fatos devem ser ressaltados:
• A matriz K é periódica (com período 1, mas em geral poderiaser d-periódica)
• Apenas a partir da análise da matriz M de um sistema maiscom-plexo, é possível inferir muitas propriedades do sistema;
• Esta metodologia é muito adequada para o estudo de sistemasonde há sincronismo mas não há concorrência (limitação severa)

25Modelagem e Controle de Sistemas a Eventos Discretos
1. Introdução: Sistemas e Modelos
Considere-se o exemplo da seção anterior com as seguintes modificações:
•Tamanho do buffer limitado a 1;•Máquina 1 com tempo de serviço exponencialλ;•Máquina 2 com tempo de serviço exponencialµ.
Buffer:Vazio (E)Cheio (F)
Estados admissíveis para cada sub-sistema:
Máqs. 1 e 2:Livre (I)Trabalhando (W)Quebrada (D)

26Modelagem e Controle de Sistemas a Eventos Discretos
1. Introdução: Sistemas e Modelos
As transições de estado são provocadas pelos seguintes eventos(com respectivos rótulos):•início de trabalho na máq. i : si
•final de trabalho na máq. i : fi
•reparação da máq. i : ri
•quebra da máq. i : bi
Os eventos si e ri podem ser inibidos respectivamente pelos sinais ui e vi.
Diagramas de transição de estado:
E
F
s2
f1
I i
DiWi
f i
si:ui ri:vi
bi
i = 1,2

27Modelagem e Controle de Sistemas a Eventos Discretos
1. Introdução: Sistemas e Modelos
Objetivos de Controle:
•M1 só pode ser iniciada se B está vazio;•M2 só pode ser iniciada se B está cheio;•M1 não pode ser iniciada quando M2 está quebrada;•Se ambas as máqs. estão quebradas, então M2 deve ser reparada antes.
Estas podem ser vistas como especificações em malha fechada
Estas regras eliminam 6 dos 18 estados possíveis do sistema
Em outras palavras, o controle deve garantir uma limitação no espaço de estados através da habilitação e inibição de ui e vi.

28Modelagem e Controle de Sistemas a Eventos Discretos
1. Introdução: Sistemas e Modelos
Em malha fechada (i.e. sob ação de controle) o sistema deveráevoluir segundo o diagrama de transição a seguir:
29Modelagem e Controle de Sistemas a Eventos Discretos
1. Introdução: Sistemas e Modelos
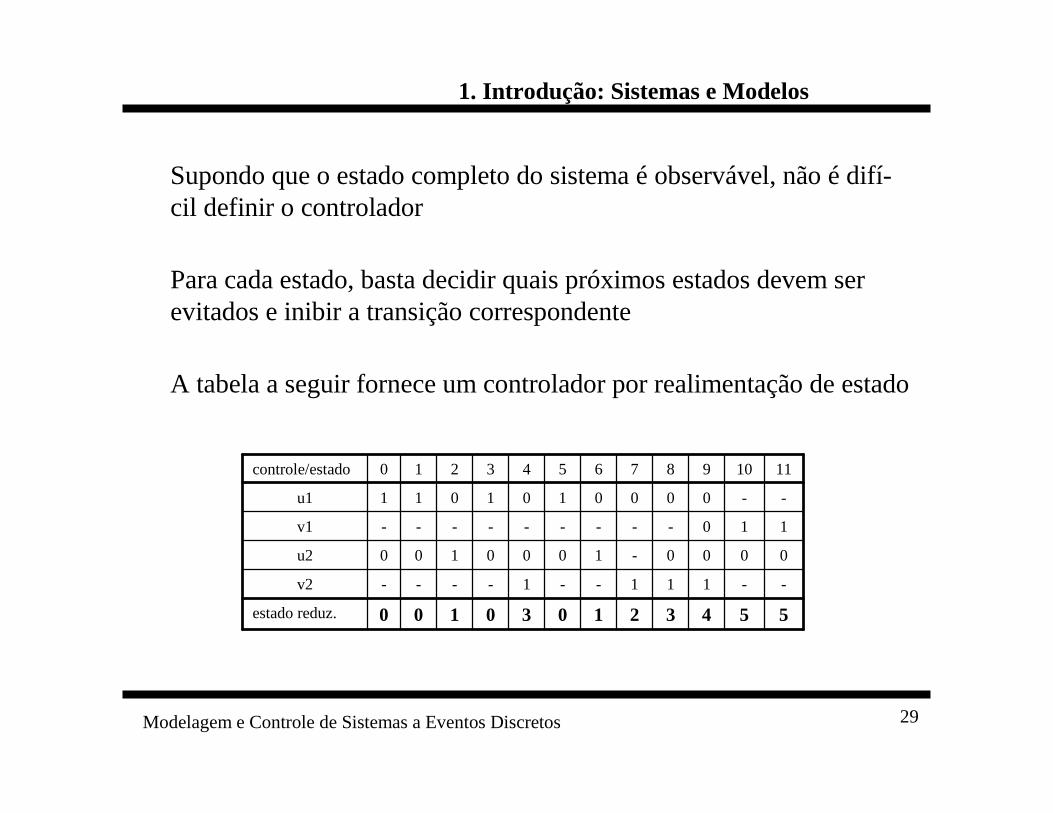
Supondo que o estado completo do sistema é observável, não é difí-cil definir o controlador
Para cada estado, basta decidir quais próximos estados devem ser evitados e inibir a transição correspondente
A tabela a seguir fornece um controlador por realimentação de estado
554321030100estado reduz.
--111--1----v2
0000-1000100u2
110---------v1
--0000101011u1
11109876543210controle/estado

30Modelagem e Controle de Sistemas a Eventos Discretos
1. Introdução: Sistemas e Modelos
Da tabela anterior, observa-se que para muitos estados a função decontrole é a mesma, sendo possível trabalhar com o conceito deestado reduzido.
Se os estados não são observáveis, mas a sequência de eventos é, a solução é criar uma cópia do sistema, que a partir da sequênciade eventos, produza a sequência de estados correta.
cópia + controle = supervisor
cópia reduzida + controle = supervisor quociente

31Modelagem e Controle de Sistemas a Eventos Discretos
1. Introdução: Sistemas e Modelos
Sistema Dinâmico
Observador
Estimador de Estado
Cópia do Sistema Dinâmico
Controladorpor Realimentação
de Estado
Controle Estado
x
Medidas
y
EstadoEstimado
Sistema Discreto
Gerador deEventos
Cópia do SistemaDiscreto
Controladorpor Realimentação
de Estado
Controle Estado
x
EventosObservados
EstadoExato
A figura mostra a analogia entre esta abordagem e o controleótimo estocástico LQG:
supervisorquociente

32Modelagem e Controle de Sistemas a Eventos Discretos
1. Introdução: Sistemas e Modelos
Associando a sequência de eventos à saída do sistema;
Definindo uma coleção de sequências de eventoscom sendo uma linguagem
O problema de controle supervisório é:
• Pode uma dada linguagemser implementada por uma escolha adequadade uma função de controle baseada na observação de uma seq. de eventos?
• Se sim, como?
• Se não, é sempre possível aproximar uma linguagem por outra, a saber aúnica mais abrangente linguagem controlável contida na primeira.