Embed Size (px)
Citation preview

Sistemas Aumentados de Grupos e Shifts de Tipo Finito'
ELIANE ZERBETTO TRALDI
Orientador: PROF. DR. OZIRIDE 1\4—ANZOLI NETO
Dissertação apresentada ao Instituto de Ciências Matemáticas e
de Computação da Universidade de São Paulo, ICMC-USP, como parte
dos requisitos para a obtenção do título de «Mestre em Ciências na Área
de Matemática".
São Carlos
Janeiro de 1999
Sate Trabalho teve suporte financeiro da CAPES e FAPESP.

Agradecimentos
Agradeço ao Dide pela amizade e dedicação com que me orientou.
Agradeço aos meus pais pelo apoio e grande incentivo que sempre me deram.
Agradeço ao Prof. Daniel pela ajuda.
Agradeço aos professores e funcionários do ICMC.
Agradeço aos colegas de curso e amigos, José Carlos, Luciana, Márcio, Maria
Alice e Vera.
Agradeço a todos que de alguma forma contribuíram para a realização deste
trabalho.

Resumo
Seja (G, x, x) uma terna consistindo de um grupo finitamente apresentado G,
um epimorfismo x : G —> 7, e um elemento distingüido x E G tal que x(x) = 1.
Dado um grupo simétrico, construímos um grafo direcionado finito 1" que descreve o
conjunto (1., de representações p: Ker (x) —> S,. bem como a aplicação a r —>
definida por (az p)(a) = p(x-1 ax) para todo a E Ker(x). O par ((Dr, az) tem a
estrutura de um shift de tipo finito. Discutimos propriedades básicas e aplicações
do shift representação ((Dr, az), incluindo aplicações à Teoria de Nós.

Abstract
Let (G, x, x) be a triple consisting of a finitely presented group G, ai epimor-
phism x: G -4 Z, and a distinguished element x E G such that x(x) r•-• 1. Given
a finite symmetric group Sr, we construct a finite directed graph 1" that describes
the set of representations p: Ker(x) Sr as well as the mapping a :
defined by (a.p)(a) = p(x-lax) for ali a E Ker(x). The pair az) has the struc-
ture of a shift of finite type. We discuss basic properties and applications of the
representation shift (*tin a.), including applications to knot theory.

Sumário
Introdução 1
1 Preliminares 3
1.1 Apresentação de Grupos 3
1.2 Nós e Enlaçamentos 4
1.3 Apresentação de Wirtinger 5
2 Representações em Grupos de Permutações e Sistemas Dinâmicos de (G , x, x) 11
2.1 Representações em Grupos de Permutações 11
2.2 Os Sistemas Dinâmicos de (G, x, x) 21
3 Shifts de Tipo Finito 25
4 Aplicações 33
4.1 O Invariante de Bieri-Neumann-Strebel 33
1

4.2 Os Grupos de Baumslag-Solitar 38
4.3 Um Invariante de Entropia para (G, X) 41
Referências Bibliográficas 48

Introdução
Seja G um grupo finitamente apresentado e x: G —> Z um epimorfismo. Vamos denotar o núcleo de x por K. Esforços para entender a estrutura de Kx são dificul-tados pelo fato deste grupo freqüentemente não ser finitamente geradá. Entretanto várias aplicações de Teoria de Grupos à Topologia requerem tal investigação.
Um sistema aumentado de grupo é uma tema (G, x, consiptindo de um grupo finitamente apresentado G, um epimorfismo x : G —> Z, e lum elemento distinguido x E G tal que x(x) = 1.
No Capítulo 1 daremos alguns resultados e definições que são rá-requisitos básicos para este trabalho.
No Capítulo 2 estudaremos as representações de Kx em grupos d permutação, onde x é o epimorfismo de algum sistema aumentado de grupo (G, xi x). Também estudaremos os sistemas dinâmicos ((Dr, az) e (Zr, "az) associados a O, x, x). Os elementos de ((Dr, crs) são as representações de Kx no grupo simétri4 Sr. Usando ferramentas de Teoria Combinatória de Grupos daremos um algoritr4o para deter-minar os shifts ((Dr, cm). Cada shift ((Dr, a.) se aplica sobre um sist ma dinâmico @ir, 64, cujos elementos são os subgrupos H de Kx de índice : < r. Con- seqüentemente, quando ((Dr, crs) é finito, Kx contém apenas um nii4ero finito de subgrupos de índice menor ou igual a r.
No Capítulo 3 daremos algumas definições de Dinâmica Simbólica mostraremos que o shift ((Dr, a.) associado ao sistema aumentado de grupo (G, x, x) k conjugado a um shift de tipo finito. Também discutiremos quando uma representação p: Kx —> Sr se estende a uma representação de G em Sr. Daremos uma condição necessária para que isso aconteça em termos de ((Dna.).
1

No Capitulo 4 estabeleceremos condições em termos do invariante de Bieri-Neumann-Strebel [2] para que os shifts (4,n o-s) sejam finitos para todo r. Esta condição depende apenas do par (G, x). Também definiremos a entropia de um shift e verificaremos que a entropia do shift ((Dr, o-r) associado a (G, x, x) é um invariante do par (G, x).
A principal referência deste trabalho é [13].
2

Capítulo 1
Preliminares
1.1 Apresentação de Grupos
Sejam 7-1, r2,... palavras (isto é, seqüências finitas de letras com expoentes in-teiros) nos símbolos xl, x2, .... Seja G um grupo. Escrevemos
G -"=-: (xl, x2, • • • r1, r2, • • •)
se G é isomorfo ao quociente do grupo livre nos símbolos xl, x2,... pelo menor subgrupo normal que contém r1, r2, .... Os xi são chamados geradores e os ri relatores desta apresentação de G. Uma outra notação é escrever a equação ri = 1, chamada relação, no lugar do relator n.
É um fato conhecido que todo grupo tem uma apresentação (ver [4]). O grupo G é dito finitamente gerado (respectivamente finitamente apresentado) se tem uma apresentação com um número finito de geradores (respectivamente geradores e relações).
Uma forma bem concisa do Teorema de Van Kampen é enunciada usando-se apresentação de grupos.
3

Teorema 1.1.1 (Teorema de Vau Kanripen). Seja X um espaço topológico com subconjuntos abertos Xo, X1, X2 tais que X = X1U X2 e X0 = x.1 n X2. Suponhamos que X0, X1, X2 são não vazios e conexos por caminhos. Tomando ponto base p em X0, suponhamos conhecidos
iri(Xi,p) (ah 0-2, • • • r1, 7.25 • • • )
ri(x2,p) (b1, 42, • • • si, 82, • • •)
ri(Xo,P)"" (ch e2 • • • kl, k2, • • •)•
Além disso, considerando as inclusões i1 : Xo —> X1 e i2 : X0 —> X2, suponha-mos também conhecidos os homomorfismos induzidos il. : (Xo, —> ?ri(Xi,P) e i2* : (X0, p) —> ri (X2, p). Então
ri(X,p) = ,bir • • ri,- • • , si, • • • ,ii.(ci) = i2.(ci), • • • )•
Demonstração: Ver [9].
Dado um grupo G com apresentação / ‘91, 92, • • • , gn ri, r2, • • • , n) , o subgrupo comutador é o menor subgrupo normal G' tal que G IG' é abeliano. G' pode ser obtido como o subgrupo normal gerado pelos elementos [gi,§9] = O grupo quociente G I G' é chamado grupo quociente comutador ou grupo abelianizado, e o homomorfismo canônico G —> G IG' é chamado abelianização.
1.2 Nós e Enlaçamentos
Definição 1.2.1. Um subconjunto K do espaço TR.3 é um nó se K é homeornorfo ao círculo Si. Mais geralmente, K é um enlaçamento se K é horneomorfo à urna união disjunta de círculos.
Dois nós ou enlaçamentos K, K' são equivalentes se existir um homeomorfismo h : X —> X tal que h(K) = K'.
Se K é um nó (ou enlaçamento) em 111,3, o grupo fundamental ri (Ift3 — K) do seu complemento é chamado, simplesmente, o grupo de K.
4

Proposição 1.2.1. Se .8 é qualquer subconjunto limitado delle tal quelle \ .8 é conexo por caminhos, então a inclusão induz um isomorfismo
(IR3 \ B)•±' ri (S3 \ B).
Demonstração: Ver [9]. •
1.3 Apresentação de Wirtinger
Vamos descrever um procedimento para obter uma apresentação do grupo de um nó K em IR3, partindo-se de uma projeção do nó. Por uma projeção devemos entender um número finito de arcos ab , an em um plano P (por exemplo, o plano xy). Cada % é assumido conectar ai_.1 a %.4.1 (módulo n) por arcos de cruzamento inferior, na altura z = -E, como mostra a Figura 1.1.
Figura 1.1: Cruzamento dos arcos de um nó
O Algoritmo
Vamos assumir por conveniência que os cei são orientados compativelmente com a ordem de seus índices. Façamos uma seta xi passando "sob" cada % na direção da direita para a esquerda. Cada xi representa um laço em IR,\K. O ponto p = (O, 0, 1)
5

é tomado como ponto base, e o laço consiste do triângulo orientado de p até o inicio de x , ao longo de xi e de volta a p.
Agora em cada cruzamento existe uma relação entre os x. As duas possibilidades são mostradas na Figura 1.2.
ah
XkXj = Xj+ 1 X k XjXk = XkXj+1
Figura 1.2: Relação entre os xi
Denotaremos por n a relação que valer para cada i. Assim existem exatamente n relações ri, • • • ,r.
Teorema 1.3.1. O grupo ri (IR3 \ K,p) é gerado pelos xi e tem apresentação
ri (R3 \ K, (xl, ,x, , • • •
Além disso, qualquer das relações ri pode ser omitida e o resultado continua ver-dadeiro. (Esta relação omitida é conseqüência das outras.)
Demonstração: Lembremos que K está no plano P = {(x, y, z) E 1R3 z = O}, exceto nos cruzamentos, onde os arcos estão no plano z = —e. Para aplicar o Teorema de Van Kampen, dividimos X = IR3 \ K em n+2 pedaços A, Bi, • • • , Bn, C.
Seja A = {z I z > —e} \ K O bordo de A é o plano P' = {z I z = —e} com n segmentos removidos /3, ••• , fin. Seja A a caixa retangular sólida cuja tampa está em P' e contém fli (veja Figura 1.3). Então removemos fli de A e adicionamos um arco até p, desviando de K. Estas caixas podem ser tomadas disjuntas (a menos de p). Finalmente seja C igual ao fecho de tudo que está abaixo de A U B1 U U Bn mais um arco até p. Queremos calcular
71-1. (A U U U Bn U C, p) = 7ri (R3 \ K, p).
6

Figura 1.3: A
Temos que iri(A,p) é um grupo livre gerado por xi, , xn. Agora vamos inves-tigar o efeito de unir Bi a A. Si é simplesmente conexo e Bi fl A é um retângulo menos 13i mais um arco até p. Assim, iri(Bi n A,p) é cíclico infinito, com gerador y. Como é claro, pelo desenho, y se torna a palavra xkxi-lxk-lx2. Assim, pelo Teo-
rema de Vau Kampen, ir1 (BI U A, p) tem geradores xi, , x,, e uma única relação xkxi = x2xk, que é ri. Assim
iri(ÁuBi,p)(xi,...xn
Similarmente, unindo 132 teremos
wi(él U U B2,P) (xi, • • • ,x, r2).
Procedendo de maneira análoga, vamos obter
Irl. U U • • • U Bn, •• • , x8 : • •
Finalmente unindo C a AUBI U... UBn temos que irl. (AU U... UBn UC,P) (ÁuB1 U. • • U Bn, P), já que CeCn (ÁuB1 uUB) são simplesmente conexos.
Assim
7

ri (A U U U Bnu C ,p)(xi,... ,xn : • • • ,r).
Isto completa a demonstração, exceto pela observação que uma dsa relações (digamos rn) é redundante. Para ver isto, trabalharemos em S3 = 1113 U oo. Já observamos que ri OR3 \ K) ri (S3 \ K). Sejam
A' = AU oo
C'=.8„UCUoo
É claro que Á'uB1 u...0 U C' = S3 \ K e que ri (A, = (k, p). Assim, unir Bi, • . • , tem o mesmo efeito que antes, ou seja,
(14' U U U ej I
ri, • • • ,r_i).
Mas agora temos que C' e C n A' U B1 U U B„_1 são simplesmente conexos, sendo uma 2-esfera menos um arco. Logo
iri(Á'UB1 U...UB»_1 uC',p)(x1,... ,xn : n, • • •
ou seja,
,x ri, • • • ,r_i).
Em geral só mencionamos o ponto base p quando necessário.
Exemplo 1.3.1. Nó Figura Oito (Figura 1.4)
Nos cruzamentos temos as seguintes relações:
8

Figura 1.4: Nó Figura Oito
x1x3 = x3x2
r2 : X4X2 = X3X4
r3 : x3x1 = x1x4
r4 : x2x4 = x1x2.
Assim, temos
Ir1(1113 \ K) (xi, x2, x3, x4 : r1, r2, r3, r4).
Podemos eliminar a relação r4. De fato: De ri temos que x3 = x1x3x2-1. Substi-tuindo em r3 obtemos
X 1X3X-12 = XiX4.
De r2 tiramos que x4 = x3x4x2-1. Substituindo em (1.1) temos
9

- - X1X3X2
1 X1 = X1X3X4X2 1
-1 -1 X2 XI = X4X2
X2X4 = X1X2.
Logo
ri(313 \ K)c", (xl, x2, x3, x4 : r1, r2, r3).
Por outro lado, de ri tiramos que x2 = x3-Ix1x3 e de r3 obtemos x4 = x1 1x3x1. Substituindo em r2 teremos
-1 -1 -1 XI X3X1X3 XIX3 = X3X1 X3Xi.
Dessa forma, concluímos que
ri are \ K).r.." (XI, X3 : XFIX3X1X3-1X1X3 = X3X171X3X1)•
10

Capítulo 2
Representações em Grupos de
Permutações e Sistemas
Dinâmicos de (G, x, x)
2.1 Representações em Grupos de Permutações
Uma representação de um grupo K em um grupo de permutações é um homomorfismo p • K Sr, onde Sr é o grupo simétrico operando sobre o conjunto {1, ,r}. Chamaremos p uma representação de K em Sr. A representação p é transitiva se p(K) opera transitivamente sobre {1, ,r}, ou seja, se dados Vi, j E { 1 . . . r} existir A E p(K) tal que À(i) = j.
Seja K um grupo qualquer e S,. o grupo de permutação de r elementos. O grupo das representações de K em Sr é denotado por Hom(K,S,.). Defina uma função ir de Hom(K, Sr) no conjunto dos subgrupos de K da seguinte forma
(P) = {g E K p(g)(1) = 1}.
11

Se considerarmos em S o subgrupo S,._1 = {u1u(1) = 1}, então vemos que ir (p) =
Lema 2.1.1. Seja G um grupo e H, F subgrupos de G com 1G : FI finito. Então 1H: F n HI é finito e 1H: FflH < IG : Fl.
Demonstração: De fato, suponhamos que 1G : Fl = t. Então G se escreve como reunião disjunta
Assim temos
HnG.(HnF)u(Hn12F)u...u(Hn1,F),
reunião disjunta. MasHnG=H, pois H é subgrupo de G, então
H = (H n F) u (H n l2F)u ...0 (H n ltF),
reunião disjunta. Sejam ,ik, 2 < k < t, os índices tais que H n lijF 0. Para cada i existe hij E H tal que Hn 13F = H n hijF. Assim, temos
H = (H n F)U (H n hs,F)U ...0 (H n hi,F)
= (H n F) U hi, (H n F) u ...0 h,k(H n F),
onde as reuniões são disjuntas. Portanto H é uma reunião disjunta de classes laterais de H n F. Assim 1H : F n Hl é finito e 1H : F n Hl < IG : Fl.
Observação 2.1.1. Consideremos uma representação p : K Sr Temos que IS,. : = r. Pelo Lema 2.1.1 acima, segue que Im(p) : n Im(p)1 < r.
Proposição 2.1.1. Seja K qualquer grupo e seja r um inteiro positivo. A função : p {g E K j p(g)(1) = 1} aplica o conjunto de representações p: K Sr sobre
o conjunto de subgrupos H < K de índice 11( : 111 < r. A pré-imagem de qualquer subgrupo de índice r contém exatamente (r —1)! representações transitivas.
12

Demonstração: Seja p: K —> Sr uma representação de K em Sr Considerando a sobrejeção p: K —> Im(p), vemos que p aplica r(p) em Sr _i n Im(p). Logo existe uma sobrejeção p- entre Klir(p) e Im(p)/(Sr_i n Im(p)). Temos que p também é injetiva. De fato, sejam xiir(p), x2ir (p) E K lir(p) de forma que p(xj)[1m(p)nS, -1] = p(x2)[1m(p) n Sr _1]. Logo p-1(xi)p(x2) E (Im(p) n Sr_1), ou seja, p(xrlx2) E Sr -1 e então, xrix2 E r(p). Assim temos que xilr(P) = xa(p). Mas sabemos pela Observação 2.1.1 que #Im (p)/(Im(p) n Sr _1) r. Logo, 1K: ir(p)1 r.
Seja H subgrupo de K com 1K : 111 = s < r. Consideremos o conjunto X = {H, k2H,... ,k„H} das classes laterais à esquerda de H em K e façamos as identificações: H .4--* 1, e kH i = 2,... , s. Denotemos por SI o grupo das permutações de X, que podemos identificar com S„.
Consideremos a seguinte ação
0:K x KIH KIH kkiH
Mostremos que rk está bem definida. De fato, sejam kH = sH. Devemos mostrar que [pH(g)](kH)=[OH(g)](sH), ou seja, que gkH = gsH, ou ainda, (gk)'gs E H. Como kH = sH, segue que k's E H. Logo (gk) igs=k-ig-Igs =k-ls E H.
Esta ação é transitiva, pois dados kili, k1H E KIH temos que 0(k1kri, = = 411.
Seja PH : K —> Sx dada por [Pu(k)] (41-I) = kkiH = k3H, para algum j. Temos que pH é uma representação transitiva, pois, dados kiH, k1H temos que [pH(kik71)](kiH)= k,H. Além disso,
[PH(xY)](kH) = xykH = x(ykH) = P H (A [ P (Y)(k In] = [pH(x) pH(y)](kH),
Portanto pH é um homomorfismo.
Mostremos agora que ir(pH) = H. Seja k tal que pH(k)(H)= H. Então kH = H. Logo k E H. Por outro lado, PH (h)(H) = hH = H,Vh E H. Assim, r(pH) = H.
Mostremos agora que a aplicação ir é sobrejetora. Seja H < K, com índice 1K : H1 = s < r. Consideremos X como anteriomente e pH : K —> SI. Além
13

disso, consideremos a inclusão i :S5 —* Sr Como Sx pode ser identificado com S., obtemos uma aplicação i o pH : K com r(pH) = r(i o PH) = H. Como tomamos H um subgrupo qualquer, concluímos que ir é sobrejetora.
Seja agora H < K com 1.1( : Hl = r. Precisamos mostrar que ir-1(H) contém exatamente (r — 1)! representações transitivas.
Consideremos Sx fazendo a identificação usual de Sx com S. Seja HSx C Sx o conjunto das permutações que fixam H. O conjunto HSx será identificado com Sr_i. Consideremos a ação
HSx x r-1(H) ir-1(H)
(ce,P) Pe
onde pci(k)= a-lp(k)a : Sx Sx•
Esta ação está bem definida e [a-'p(k)&](H) = H, pois a E HSx e p E ir-1(H).
Sabemos que ¡Órbita de pH1=1HSx :Estabilizador(PH)l•
Calculemos Estabilizador(pH). Suponhamos que a-lpHa = pH. Logo pira = cepH,Vk E K. Então
1 Pisla = PH, 1/21k E K
cripH(k)ce= PH(k)
(cri PH(k)ce)(H)= PH(k)(11)
(criPH(k))(H)= kH
cri(kH)= kH.
Portanto segue que a-1 = Id e então a = Id. Assim teremos
jórbita de pHI=IHSx : {Id}1=IHSx1= (r — 1)!
14

Verifiquemos que estas (r — 1)! representações são transitivas. Consideremos kiH, kiH E X = {H, k2H,... ,k,11}. Para cada a devemos encontrar g tal que p(g) leva kiH em kiH. Faça kc,(i)1/ = a(kiH) e k.u)H = a(kiH). Então basta tomarmos g = kc,(j)k ) e teremos
(p (g))= [a-1 pH(k ()k ))al(kiH) =
pH(kc,(j)kj4))kc,(i) H = a-1 pH(kü(i))H = kiH.
Dessa forma mostramos que existem pelo menos (r-1)! representações transitivas em 71-'(H). Devemos agora mostrar que estas são as únicas. Para isto, seja p uma representação em 7r-1(H). Mostremos que existe a (como acima) tal que a-lpHa = p.
Observemos que para p E 7r-1(H) e x, y na mesma classe lateral de H, isto é, x-ly E H, temos Id = p(x-ly) = p-1(x)p(y) e portanto p(x) = p(y). Se g E krH então p(g) = p(kr) e portanto (p(g))(kiH) = [p(kr)](kiH) = kiH e j está bem definido.
Precisamos encontrar a tal que a-1~ = p, isto é, Vg, pH(g)a = p(g). Temos que g = kih, com ki e h bem definidos. Então
ori Pli(9)a = P(9)
l pH(kih)a = p(kih)
ct-lPH(ki)PH(h)a = p(k)p(h)
pH(ki)a p(ki).
Aplicando em H temos que
[a-1 pH(ki)a](H) = p(ki)(H)
a-1(kiH) = p(ki)(H)
a-1(kiH) = kiH,
15

onde j está bem definido.
Esta equação define a-1 nas classes laterais de H e portanto define a.
Desta forma mostramos que existem exatamente (r — 1)! representações transi-tivas em ir-1(H).
E
Dada qualquer representação p: K Sr pode-se obter um conjunto de geradores para o subgrupo H = ir(p) pelo seguinte método topológico. Seja C2 um 2-complexo com uma única 0-célula v tal que iri(C2, v) K. O complexo C2 é facilmente cons-truído a partir de uma apresentação (não necessariamente finita) para K: 1-células orientadas em C2 correspondem a geradores, 2-células orientadas correspondem a relatores. Use a representação p para construir um espaço de recobrimento de r folhas p : t-12 C2 da,seguinte forma. A única 0-célula v é recoberta por O-células
, 77,- Uma 1-célula orientada e é recoberta por r 1-células orientadas que vão de fn até 0,,(e)(i), = 1, r; será útil chamar cada uma destas 1-células por e. Fi-nalmente, cada 2-célula orientada em C2 é recoberta por r 2-células orientadas de maneira óbvia. Seja C7, a componente de ta que contém z31. A projeção p induz um monomorfismo p xi(ãO, ri(C2,v) com imagem H. Projetando os geradores para iri(q,, fh) produzimos geradores para H.
a2
( í1
1»
x • a
Figura 2.1: 1-esqueleto de C2 e seu espaço de recobrimento
Exemplo 2.1.1. Seja K o grupo (x, a : xosx-1 = a2) de dois geradores e uma relação, com representação p: K S2 dada por x (1,2), a (1). O 1-esqueleto de C2 e seu espaço de recobrimento G-12 aparecem na Figura 2.1. A partir disto, vemos que os elementos a, xax-i , x2 geram o subgrupo correspondente H < K de
16

índice 2. Usando a relação em K obtemos o conjunto mais eficiente de geradores {x2, a}
Neste trabalho estamos interessados no caso K = Kx, onde x é o epimorfismo de algum sistema aumentado de grupo (G, x, x).
Dada qualquer apresentação finita (si, ,s, : r1, , Ni) para G, um algo- ritmo bem conhecido da Teoria Combinatória de Grupos, o método de Reidemeister-Schreier, nos torna capaz de encontrar uma apresentação (possivelmente infinita) para K. Vamos descrever o procedimento para a nossa situação.
Método de Reidemeister-Schreier
Consideremos (C, x, x) um sistema aumentado de grupo e uma apresentação finita para G, (xi, • • • ,s , rni). O elemento distingüido x corresponde a alguma palavra w nos geradores si. Adicionamos um novo símbolo x e uma relação • = w à nossa apresentação para G. (Tal operação é chamada uma "Transfor-mação de Tietze" [7].) Depois trocamos cada gerador si por a, = xix-x(''). Mais rigorosamente, introduzimos novos símbolos ai e relações ai = xix-x(xi); as novas relações são equivalentes a si = aisx(zi) que usamos para reescrever ri, , r„, em termos de x, , an; finalmente, eliminamos os velhos símbolos si e os relações • = 5i5-x("1). (O último passo pode ser visto como a operação inversa do tipo de transformação de Tietze com a qual começamos.) Para cada i = 1,... ,n e j e Z, denotamos o elemento ri aixi pelo símbolo Claramente, cada ai j é um elemen- to de Kr Na verdade, não é difícil ver que estes elementos geram Kr Obtemos um conjunto de relatores para Kx reescrevendo cada ririxi ,x-jrnixi como uma palavra nos cid, um processo que é possível porque a soma dos expoentes de x em cada ririxi é zero, i = 1, , m. Note que a reescrita de x-i-trkxj+t é justamente o resultado de adicionar t ao segundo índice da reescrita de rirkxj.
Exemplo 2.1.2. Denotemos o grupo (x, a : xax-1 = a2) do exemplo anterior por G. Usando o método de Reidemeister-Schreier verificamos que o núcleo Kx do homomorfismo abelianização x: )7 é (ai : = al+1, i e Z).
De fato: Temos que x(s) = 1 e x(a) = O. Vamos encontrar o conjunto de geradores de Kr
17

= ax-x(a) = a
= x-j aixj = axi
Assim, {ai = raz , i E Z} é o conjunto de geradores de Kr Encontremos agora as relações de K. A relação da apresentação de G é xax-1 = a2, assim:
: Ci(xax-1)xi = rca2zi ri x-i+tari-1 = x-ia2xi
ai_I =
Logo, (ai : = 4+1) é uma apresentação para K.
Consideremos a associação
P(ai) = J(1,2,3) se i é par
(1,3,2) se i é impar (2.1)
Note que se i é par temos
p(ai) = (1, 2, 3)
p(a 1) = P(ai-E1)2 = (1, 3, 2)(1, 3, 2) = (1, 2, 3).
Também se i é impar temos
p(ai) = (1,3,2)
P(c4+1.) = P(ai+1)2 = (1, 2, 3)(1, 2, 3) = (1, 3, 2).
Logo, p(ai) = p(a 1) , Vi E Z. Dessa forma, a função p induz uma representação de Kx em 53. Os 1-esqueletos de C' e C-2 estão indicados na Figura 2.2.
18

azi
Figura 2.2: 1-esqueletos de C2 e ti.2
O subgrupo correspondente H < Kx de índice 3 é gerado por
a2ia23+12 a2i-I-la21) aaiaziaa, azi+iazi+iaak+i,
onde i, j, k variam sobre Z.
Simplificando o conjunto de geradores de Kx, temos que
aaiazi+i = 1:122i+la2j4-1 = 44.2a2j+1 = . . . = 2i2j+; -2; ti2n+ a21 ±i = azi+1 22U-i)+1
a2+1 = 1'12ff-1
Mostremos que 22(i-i)+1 + 1 = 3À, À E Z, À > O, por indução sobre j - i.
Para j - = O temos 21+1 =3. Para j-i = 1 temos 22+1+1 =9. Suponhamos que o resultado é verdadeiro para j - i = a, ou seja, 22'1+1 + 1 = 3À', e mostremos que ele também é válido para j - i = a + 1. De fato,
19

22(0E+1)+1 + 1 22a+3 ± 1 = 2222a+1 1 = 4.22"1 -E 1 =
3.220E+1 ± (220E+1 + 1) = 3.220E+1 ± = 3(22a+A1).
Da mesma forma vemos que
22U-0-1+1 a2i+la2j = a23
22(k-i)+22(k-i)+1 a2iava2k = a2k
a2i+la2j+la2k+1 = a2k
e por indução mostramos que
22(j-i)-1 ± 1 = 3A1
22(") 22&v-j) + 1= 3À2.
Assim obtemos o conjunto relativamente menor de geradores {04 1 i E Z} de K. Temos portanto, neste caso, uma boa descrição de K. De fato, Kx é isomorfo ao grupo Z[1/2] dos racionais diádicos via isomorfismo ai 1/2i. Segundo este isomorfismo o subgrupo 1/ é simplesmente 37[1/2].
Em geral, se p é qualquer representação de K em Sr, então o índice de 7r(p) é a cardinalidade do subconjunto maximal de {1, , r} contendo 1 sobre o qual p(K) opera transitivamente. Dadas duas representações, pi e p2, é uma tarefa fácil determinar quando os subgrupos Hl = ir(p1) e H2 = 7r(P2) são iguais. Primeiro, verificamos quando Hi = 11-(Pi} e H2 = ir(p2) têm o mesmo índice j em K. Se este é o caso, então podemos assumir sem perda de generalidade que pi e p2 são representações transitivas de K em Si. Agora H1 = r(pi) e H2 = 7r(P2) são iguais se e somente se p2 = r o pi para algum automorfismo interno r de Si, conjugação por uma permutação que fixa 1.
20

2.2 Os Sistemas Dinâmicos de (G, x, x)
Um sistema dinâmico é um par (X, a) consistindo de um espaço topológico X e um homeomorfismo a : X —) X. Uma aplicação f : (X, a) —) (X', a') de sistemas dinâmicos é uma função continua f : X —) X' para a qual f o o- = a' o f. Os sistemas dinâmicos (X, a) e (X', cl) são conjugados se também existir uma aplicação g: (X', a') —) (X, a) tal que fogegof são as funções identidade de X' e X, respectivamente.
Definição 2.2.1. Seja r um inteiro positivo. O shift representação associado a (G, x, x) é o sistema dinâmico (.D7., az) consistindo do espaço das representações p: Kx 5,. e aplicação az descrita por az(p)(g) = p(x-1 gx), para todo g E Kx.
A topologia em .1%. é determinada pelos conjuntos base N91,.. (p) = {did(gi)= p(gi),i = 1, ..., n}, para todo p E °D -I.' 01' • • • 'gra E Kr
Mostremos que az é de fato um homeomorfismo.
Observemos que az está bem definida. Sejam p E .1,7. e g, gh, 92 E K. Então ax(p)(9) = p(x-19x) = (p o tkz)(g) , onde okx (g) = x-1 gx. Como g E Kx temos que x-lgx = okz(g) E K. Logo p(x-1 gx) = az(p)(g) E Sr. Portanto az está bem definida.
Mostremos agora que az é bijetora. Para isto, basta exibirmos a sua inversa. Mostremos que (as)-' = az-i. De fato: (ax-, o0-4(p) = a ri (p o tkz) = Como ox o = id, pois (okx o x_1)(g) = okz(xgx-1) = = g, segue que (ax-i o a x)(p) = p0 id = p. Logo az-, o az = id. Por outro lado, (az o az-1)(p) = po tkri o okz = p, pois okri o okx = id. Assim, az o crz-I = id. Portanto, (as)' = az-1. Assim, az é bijetora.
Ainda precisamos mostrar que az e az-i são contínuas. Mostremos que a2-1 é contínua, ou equivalentemente, que az é uma aplicação aberta. Seja p E e seja N91,...,9 (p) 3 p um aberto de Precisamos mostrar que a2(N91,... wn(p)) é aberto. Mostremos que a2(N9„...,gn(p)) = Ngl,... sn(az(p)). Para isso, seja d E N91,...,9„(p). Então p' (gi) = p(gi), i = 1,...,n. Assim, az(d(gi)) = az(p(gi)) E 4,...,9. (A, i = 1,...,n. Logo az(Ngi,...,gn(p)) c Ng„...,gn(az(p)). Por outro lado, seja p' E
g,b(az(p)). Então d(g) = az(p)(gi), i = 1,...,n. Como p E segue que p1(gi) E a z(Ngi ign(p)). Assim N91 _..,9. (az (p)) C a2(N95,...,(p)). Lo-go N91 r. ign (az (p)) = ax(N91,... ig„(p)). Portanto, az-i é continua. Analogamente
21

mostramos que us é contínua. Assim concluímos que az é de fato um homeomorfis-mo.
Uma aplicação h: (G, x, x) (G', , xl) de sistemas aumentados de grupos é um homomorfismo h : G G' tal que x = x' o h. É fácil ver que tal homomorfismo induz uma aplicação h" :(, o•'.) —> o-,) entre os shifts representação associados. A aplicação h* é descrita por p' p' o h.
Definição 2.2.2. Seja r um inteiro positivo. O sistema de subgrupo associado a (G, x, x) é o sistema dinâmico (ir, 5.2) consistindo do espaço é; dos subgrupos H < Kx com IKx : Hl < r e aplicação ã : H x-I- Hx.
A topologia em 45, é determinada pelos conjuntos base Arg„... ,gn (H) = {Hl 1 lin gp(gb ,g) = H' n gp(gi, , gn)} , para todo H E a)-r, gi, ,g, E Kr (Aqui
, gn) denota o subgrupo de Kx gerado por , gn.)
Mostremos que õs é de fato um homeomorfismo.
Note que ot's está bem definida. De fato, dado H E L. temos que às (H) = x-1 Hx E c5,• pois x-lHx _< Kx e [Kx : xHx-1] = [Kx : H] < r.
Além disso, às é bijetora. De fato, à;1 = õ2-i é dada por H xHx-1. Temos (às o = H(ãs-i o õs)(H) = H.
Resta mostrarmos que õs e õs-1 são contínuas. Seja X E IS191,...,9„(H). Então n gP(gi., • • • , gn) = X n gP(gi, • • • , gn). Assim
x-1(11 n u(si, • • • ,gn))x = x-1(X n 0(gi, • • •
x-lHx n ,gn)x = x-1Xx n x-1 gp(gl, , gn)x
x-lHx n gp(x-lgix, ,x-Ig„x) = x-1Xx n gp(x-Igix, , x-lgnx)
as (X) E N2-1912,,...,,-19.,(x-lHx)
o•3,(N91,...,9„(H)) c Nx-igis,...a-ignz(o-z(H)).
Por outro lado, seja Y E N2,-191,,...,2-19.,(x-1Hx). Então
22

x-1 Hx n gp(x-1 , x-1 gnx) = Y n , gxx)
x-1 (H n gp(gi, , g„))x = x-1(xY x-1 n gp(gi, , gx))x
H n gP(gi, • • • , gn) = xYx-1 n gP(gi, • • • , gn)
xYx-1 E N91,...,9„(H)
ajl(Y) E ,g„(H)
Y E ax(Ngh,..
Nx-tg,x,...,x-ig (ax(H)) C ax(Ng„...
Dessa forma mostramos que az é uma função aberta. De forma análoga mostramos que sua inversa também é uma função aberta, e assim concluímos que az é um ho-meomorfismo.
A seguinte proposição segue facilmente da Proposição 2.1.1
Proposição 2.2.1. Seja r um inteiro positivo. A função
: p 14 H = {g E Kx 1 p(g)(1) = 1}
induz uma aplicação fr de (lir,ax) sobre (3,.,
Demonstração: Da Proposição 2.1.1 segue que ir aplica (1,, sobre Devemos mostrar que ir é uma função contínua e que ir o az = -az o ir.
Provemos que, Vpo E ir-I(N9,,...,911(H)), a vizinhança de po, N9 ,,...,9„(p0) c ,g„(H)). Se po E Cl (Ng„...,g„(H)) então ir (po) E Ng ,gn (H), isto é,
Ir (Po) n gP(91, • • • , gn) = H n gP(gi, • • • ,gv).
Se p está em N g „... ,g„ (po), então p(gi) = pe(gi), Vi = 1,... ,n. Portanto p = pg em gP(gi, • • • gn).
Afirmação: (p) n gp(gi, , g„) = (po) n gp(gi, , gz).
Da afirmação e do fato já conhecido que ir (po)flgp (gi , , g,„) = Hngp(gi, , g„), segue que p E ir' (N (H)). E assim concluímos que a aplicação ir é contínua.
23

Vamos agora provar a afirmação. Temos que
g E r(p) n gp(gi, ,94 44'
9 E gP(91) • • • )9n) e [P(9)] (1) = 1»
po (g) = p(g), [p(g)] (1) =lege gp(21,... , g„) <4.
g E gp(gb , gn) e [po(g)](1) = 1 <4.
9 E ir(Po) n gP(gi, • • • gn)•
Provemos agora que irou = cfn o ir. Temos
[ir o an](p) = ir(o-s(p)) = {g E Kx 1 [un (p)](g)(1) = 1}
= {g E Kxj [P(x-194 (1) = 1}.
krz ° 7r1 (P) = es(r(A) = rz({9 E Kx 1 P(9)(1) = 1}) =
x—i{g E Kx 1 P(9)(1) = 1}x = {x-1 gx E Kx 1 P(9)(1) = 1} =
{w E Kx 1 P(x—I9x)(1) = 1},
onde u; = x-1 gx. Portanto, ir o cr. = o ir.
O seguinte Corolário é uma conseqüência das Proposições 2.1.1 e 2.2.1.
Corolário 2.2.1. Seja (G, x, x) um sistema aumentado de grupo e seja r um inteiro positivo. Então o shift representação associado (4),.,a) é finito (respectivamente infinito enumerável, não-enumerável) se e somente se o sistema de subgrupo (3,., az) é finito (respectivamente infinito enumerável, não-enumerável).
Demonstração: Suponhamos que (4, u) seja finito . Como a aplicação C é sobrejetora, segue que (iy, as) também será finito. (A mesma justificativa para o caso de (4),., an) infinito enumerável.)
Por outro lado, se (4),., ã4 é finito, como a imagem inversa de um subgrupo H de (ir é uma quantidade finito, de representações, segue que (4),., az) também é finito. (A mesma justificativa para o caso de (ir, Ern) infinito enumerável.)
•
24

Capítulo 3
Shifts de Tipo Finito
Se x é um homomorfismo de um grupo finitamente apresentado G sobre Z, então o núcleo Kx pode ser muito complicado. Entretanto, qualquer apresentação de Kx que se obtém pelo método de Reidemeister-Schreier tem estrutura que sugere um sistema dinâmico. Continuando esta linha de pensamento mostramos que todo shift representação é conjugado a um shift de tipo finito.
Vamos revisar algumas definições e resultados de dinâmica simbólica Seja A qualquer conjunto finito. Chamamos A um alfabeto e seus elementos letras. Damos a A a topologia discreta e a Az a topologia produto. A aplicação shift a sobre Az é a função que leva qualquer p = (pá), pj E A, em p' = (p1j), onde
= pj±i. Então (.4z, o-) é um sistema dinâmico; nos referimos a este sistema, ou ao conjunto Az, como o full A-shift. Em particular, {0,1, ...,r — 1}z é chamado o full r-shift.
Se X é um subconjunto fechado de Az com a(X) = X, então (X, o-) é um sistema dinâmico que chamamos um subshift de Az, ou simplesmente um shift. Novamente, podemos chamar X de shift, com a subentendido.
Por um bloco (sobre A) entendemos qualquer seqüência finita w de letras. Se o tamanho de w é N, então w é dito um N-bloco. O bloco vazio e tem tamanho zero. Um bloco w ocorre em p E Az se w aparece como alguma seqüência de letras consecutivas em p. Seja ES uma coleção de N-blocos para algum N. O conjunto
25

X de toda p e Az tal que todo N-bloco ocorrendo em p está em /3 é um subshift. Um shift deste tipo é chamado um shift de tipo finito, e 13 é seu conjunto de N-blocos permitidos.
Quando N = 2 podemos representar X por um grafo direcionado r: o conjunto de vértices é A, e existe uma aresta de po a á se podo é um 2-bloco permitido. Os pontos de X estão em uma correspondência um-a-um com os caminhos bi-infinitos (caminhos infinitos em ambas as direções) em r Reciprocamente, se r = (V, E) é um grafo direcionado sem arestas paralelas, então obtemos um shift de tipo finito X C Vz da maneira óbvia; X é chamado um vertex shift com grafo r. Podemos também obter um shift de tipo finito X E Ez: os elementos de X são as seqüências bi-infinitas de arestas que formam caminhos em r, e ee' é um 2-bloco permitido se o vértice final de e é o vértice inicial de e'. O shift 1 é chamado o edge shift com grafo r. É fácil ver que X e X são shifts conjugados segundo a aplicação que leva a seqüência de vértices de um caminho na correspondente seqüência de arestas. Observamos que podemos definir o edge shift como acima mesmo se r tem arestas paralelas. O vertex shift e edge shift não são afetados se "podarmos" r, removendo qualquer vértice v ou aresta e que não está em qualquer caminho bi-infinito em r.
Como um exemplo disso, seja A= {0, 1, 2} e E = {00,01,10, 02, 20}. Na Figura 3.1 representamos o shift associado X, primeiro como o vertex shift de um grafo r e então como o edge shift de outro grafo r.
/I/2 O • 2 •
o
Figura 3.1: X como vertex shift e edge shift
Teorema 3.0.1. Assuma que (G,x,x) é um sistema aumentado de grupo. Para qualquer inteiro positivo r, o shift representactlo associado (4),., crz) é conjugado a um shift de tipo finito.
Demonstração: Lembremos que G tem apresentação da forma (x, ,an : r1, ,r„,) tal que x(x) = 1 e que x(ai) = = x(a.„) = 0. Além disso, Kx tem apresentação
1
‘k2
o
26

(aia : Ri, 1 < i < n, j E Z), (3.1)
onde os símbolos denotam os geradores araxi, e Ri é {x-irixi, , x-innxi} escrito como palavras nos geradores. Lembremos também que lig±t é obtido a partir de Rq adicionando t ao segundo índice de todo símbolo em Re. Suponhamos que as palavras em Re (e então em cada Re) são reduzidas e ciclicamente reduzidas, ou seja, que nenhum gerador aparece ao lado do seu inverso, e nenhuma palavra em Re termina com o inverso do gerador com o qual ela começa. Trocando os relatores originais ri por convenientes conjugados x-t,rixts , podemos assumir que se Re contém aid para algum j, então Re não contém au com j < O. Então trocando os geradores iniciais por convenientes conjugados, podemos assumir que se Re contém a para algum j, então Re contém ai,o. Se ai,o ocorre em Re, então seja Mi o maior valor de j tal que au ocorre. Se ai,o não ocorre em Re, então seja Mi igual a zero.
Da apresentação (3.1) de Kx obtemos uma apresentação de algum grupo
Ho = ((hm ala, • • • , ai,mn azo, • • • ,an,mn Ro)•
Como em Kx os geradores de 14 podem satisfazer outras relações além daquelas que são conseqüências de Re, o grupo Ho, em geral, não é um subgrupo de K. Entretanto, 14 é valioso para o estudo das representações de Kx em grupos de per- mutações. Denotemos o conjunto de geradores {al,o, aia, • • • azo, • • • pelo símbolo Ao, e seja At = {ai,t, ai,i+t, • • • , azt, • • • , an,m„±i}. Combinan- do as apresentações (At : Rt) com t variando sobre Z, reproduzimos a apresentação (3.1) de K.
Apagando ai,m„ • . , a„„m„ de Ao, produzimos um subconjunto que denotaremos por A0,1. Similarmente, 24012 é o resultado de apagar ai,o, • • • , a,,0 de Ao.
Seja A o conjunto de todas as representações de 110 em Sr. Tais representações são precisamente aquelas funções po : Ao —) Sr tais que as m equações po(ri) = id, n E Re valem em Sr. Em particular, A é um conjunto finito e pode ser calculado. Traçamos uma aresta do vértice pc, ao vértice á se, e somente se, po (ctiá+l) = para cada (Ni E 24011. O grafo r determina um shift de tipo finito X com alfabeto A.
27

Qualquer elemento p = (pá) de X determina uma função bem definida Utez At por Ni pt(ai,t_i) se atá E A. Esta função aplica cada relator x-trixt em Rt
no elemento pt(ri) que é a identidade (já que pt é um homomorfismo), e assim ela induz um homomorfismo de K = (Ag : I4,t E 7) em Sr. É fácil verificar que isto determina uma função contínua shift-comutativa f de X em ((Dr, az).
Reciprocamente, qualquer representação p : K S,. determina uma função Ao S,. para cada t por aid p(aii+t). A função aplica cada relator rj em Ro em p(x-trixt), o elemento identidade de S,., e assim ela induz um homomorfismo pt de Ho em Sr. Claramente, p = (Pt) é um elemento do shift X, e obtemos uma função contínua shift-comutativa 9: ((Dr, az) -+ X. Como f e g são inversas uma da outra, os shifts ((Dr, cf.) e X são conjugados.
Em vista do Teorema 3.0.1 elementos do shift X serão vistos como representações p : Kx S,. sem menção explícita da correspondência. Notemos que segundo a correspondência os N-blocos permitidos de X são as representações do grupo H[O,N = (A02 • • • AN -1 RO, • • • 2 RN-1) em Sr•
Qualquer apresentação com a forma (3.1) é chamada uma apresentação 7-dinâmica finita. Os resultados deste trabalho podem ser estabelecidos em termos de tais apresentações ao invés de sistemas aumentados de grupos.
Exemplo 3.0.1. Seja G = (x, a : xax-1 = e seja x o homomorfismo abeli- anização. No Exemplo 2.1.2 exibimos uma representação particular de Kx em 53. Vamos encontrar todas estas representações. Lembremos que Kx = (ai :a = 4+1, i E 7). Aqui, M = 1, e No = ("10 .Re), onde Ao = {ao, ai} e Ro consiste da única relação ao = 4. (Indexamos a letra a apenas com o seu segundo índice já que o primeiro é sempre igual a 1.) O grupo simétrico 53 é gerado por a = (1, 2, 3) e r = (1,2). Existem exatamente 6 representações de Ho em 53, correspondentes aos seis valores, (id, id), (a, a2), (a2, a), (id, r), (id, ar), (id, r) , para (ao, ai) que satisfazem o relator de Ho. Os pares se tornam os vértices do grafo direcionado 1", com uma aresta direcionada do vértice v ao vértice v' se e somente se a segunda coordenada de v é igual à primeira coordenada de v'. O grafo 1" aparece na Figura 3.2.
A partir de 1" vemos que o shift ((h, az) é finito, consistindo de apenas 3 elemen-tos. Um elemento é uma representação de Kx em 53 correspondente à seqüência constante (. ,id, id, id,...) E X. O subgrupo de Kx correspondente a esta repre-sentação é o próprio K. Os outros dois elementos são representações transitivas
28

(id,
C (id, id) » (id, o-r) (o., 0.2) (u2, Gr)
(id, a2r)
Figura 3.2: Grafo F
de Kx em S3 que formam uma órbita de período 2 em (13,o); isto é, eles são mandados um no outro por az. Estas duas representações se estendem a G (veja Proposição 3.0.2). Como urna das representações é a outra composta com um auto-morfisrno interno de S3, conjugação por (2, 3), ambas determinam o mesmo subgrupo de índice 3, chamado 3Z[1/2]. O núcleo Kx não tem nenhum subgrupo de índice 2. Seguirá de um resultado mais geral (Proposição 4.2.1) que Kx tem um subgrupo de índice r se e somente se r é ímpar, e neste caso tal subgrupo é único, isomorfo a rZ[1/2].
Embora seja conveniente representar X como o vertex shift de um grafo dire-cionado r, nós também podemos representar X como o edge shift de outro grafo F que usualmente tem menos vértices que r e assim é mais simples de se calcular. Os vértices de ' correspondem às funções p0 : A0,1 —> Sr. (Quando A0,1 é vazio, F tem um único vértice correspondente à única função Po : O —> Sr.) Se po é uma representação de Ho em Sr, colocamos uma aresta direcionada Po do vértice p01,40,, ao vértice p2,40 „ onde = Po(ai,i+i) para todo ai,i E A0,1. Notemos que
as arestas de 17 correspondem aos vértices de F. Ilustramos com um exemplo que mostra que o conjunto de representações de Kx em Sr pode ser consideravelmente maior que o conjunto de representações de G em Sr, em contraste com o exemplo anterior.
Exemplo 3.0.2. Seja G = (x, al , a2 : x ax = ai-laai) e consideremos o ho- momorfismo x : G descrito por x è-* 1, a1 0ea2 1-+O. É claro da forma da relação x'ax = a-1 la.22al que qualquer função do conjunto de geradores {x, a1, a2} no grupo simétrico S2 = o-} induz um hornomorfismo. Logo exis- tem exatamente 8 representações de G em S2. Para encontrar todas as represen-tações de Kx, primeiro aplicamos o método de Reiderneister-Schreier para obter Kx = (ai,, a2á : ajaai, = 4.,i+1). Então M1 = 1, M2 = O e HO = AO : RO ) ft onde Ao = {at,o, a1,1, a2,0} e Ro consiste da única relação aaLoai,o = a ,1 O
29

grafo direcionado r tem dois vértices, correspondentes às funções de 44 = {ai,o} em S2. Novamente da forma da relação existem 8 representações po : 110 S2, cor-respondentes as ternas ordenadas de elementos em S2, os valores de (ai,o, a1,1, (4,o)• As oito ternas se tornam arestas. O grafo direcionado e aparece na Figura 3.3. A partir disto vemos que (l'2, az) é não-enumerável. Logo Kx tem uma quantidade não-enumerável de representações em S2 e uma quantidade não-enumerável de sub-grupos de índice 2 pelo Teorema 3.0.1 e Corolário 2.2.1.
(id,id,o) Cid a (cr,o,id) cr,o,o)
(cr,id,o)
Figura 3.3: Grafo f'
Quando uma representação de Kx em Sr se estende a uma representação de G em Sr ? A Proposição 3.0.2 nos dá uma resposta completa. O Corolário 3.0.2 dá uma condição necessária em termos de (L., as).
Proposição 3.0.2. Uma representação p: Kx St. se estende a uma represen- tação de G em ,S,. se, e somente se, existe um elemento .7- E Sr tal que T—ip(aii)r p(aii+1),1 G i G 11, j E 7.
Demonstração: Suponha que p: Kx S,. se estende a uma representação de G em S. Seja I' = p(x). Aplicando p em cada lado da relação x-laiix =aii+i, temos
p(x-laijx) = p(ai,j+i) P(x)-1P(aii)P(x) = P(aii+t)
rip(a)r =
Reciprocamente, se p é uma representação de Kx em S,. e existe um elemento .7- E Sr tal que T—lp(aii)r = p(ai j+i), 1 < i < n, j E Z, então podemos estender p a todo G definindo p(x) como sendo T.
Corolário 3.0.2. Se uma representação p: Kx se estende a uma represen- tação de G em Sr, então p é um ponto periódico de ((Dr, a.); isto é, ag(p) = p para algum inteiro positivo d.
30

Demonstração: Como p se estende a uma aplicação de G em Sr, pela Proposição 3.0.2 existe T E Sr tal que ri p(a, j)r = p(aii+1). Seja d a ordem de r em Sr. Como p(ai j) = r-dp(ai j),rd = p(aij+d), segue que azd(p)= p no shift (r, az).
Observamos que pontos periódicos de (4:10,., ar) não precisam se estender para representações de G em Sr. Por exemplo, no Exemplo 3.0.2 a representação corres-pondente a p= (h), onde
(id, a, id) se t é par Pt =
(a,id, id) se t é ímpar (3.2)
não se estende a uma representação de C em qualquer grupo simétrico Sr. De fato, temos
P(al,o) = id P(az,o) = id
p(ai,i) = a P(a2,i) = id
P(a1,2) = id P(az,z) = id
p(ai,$) = a p(a2,3) = id
Assim, suponhamos que p se estende a uma representação de G em Sr. Então existe T E Sr tal que r-lp(aid)r = p(oei JIA. Logo r-lp(ai,o)r = p(a1,1), ou seja,
= a. Logo, id = a, o que é um absurdo. Logo p não se estende a todo G.
Entretanto é possível caracterizar os pontos periódicos do shift representação. Se (G, x, x) é um sistema aumentado de grupo, então para qualquer inteiro positivo d definimos IÇA como o núcleo da composição G —Y Z Z/(d), onde a primeira aplicação é o epimorfismo x e a segunda é a projeção quociente natural.
Proposição 3.0.3. Uma representação p : Kx Sp. é um ponto periódico de (r, a) se, e somente se, para algum d > 0, p se estende a uma representação de IÇA.
31

Demonstração: Seja (ai :R5, 1 < < n, j E 7) uma apresentação para K. Não é difícil ver que Kxgg tem apresentação (y, aid R1,y-laidy = 1 < i < n, j E 7) na qual y representa o elemento xd E G. Se c4(p) = p, então podemos estender p a Kx4 definindo p(y) = id. Reciprocamente, se p: Kx se estende a uma representação de Kxii em Sr então, denotando a extensão por p, devemos ter
P(Y)-1P(aii)P(Y) = P(ai,i+d) para todo ajj. Seja q a ordem de p(y) em Sr. Então p(aii)= p(aii+4). p(y)-dqp(aii)p(y)dg = p(aii). Logo p é periódica.
32

Capítulo 4
Aplicações
4.1 O Invariante de Bieri-Neumann-Strebel
Novamente seja G um grupo finitamente apresentado e seja x um epimorfismo com núcleo K. Dada uma apresentação finita de G, obtemos no Capitulo 3 uma apresentação (2t0 : Ro) de um certo grupo Ho. Como já observamos, em geral Ho não é um subgrupo de Kr Mas existe um subgrupo normal, que chamamos Ko, em Ho tal que H0/K0 é subgrupo de Kr Similarmente para H. Denotaremos estes grupos fatores por Ht*. Em [8] Rapaport descreve como recuperar G usando 110*: Seja H0,1* o subgrupo de 110* gerado por ito,1 e seja 1-10,2* o subgrupo gerado por 110,2. A aplicação aiá ai4+1 induz um isomorfismo ek : H0,1* .4 110,2*. O grupo G pode ser descrito como (x, H0* : x-ihx = ek(h)), h E H0,1* (onde, abusando da notação, da maneira usual, escrevemos Ho* no lugar dos geradores e relatores específicos para tal grupo). Os peritos reconhecerão G como uma extensão HNN de H0*. Lembremos que um grupo G é uma extensão HNN de um grupo B se existirem subgrupos S e T de B e um isomorfismo c : S T tal que G = (x,B : x-1 sx = ek(s),s E 5), onde x é um gerador não contido em B. Neste caso, B é chamada a base da extensão HNN, enquanto S e T são os subgrupos associados. Quando S coincide com a base B, então a extensão HNN é dita ascendente.
Se G é qualquer grupo finitamente apresentado ex:G47é um epimor-
33

fismo, então G pode ser descrito como uma extensão HNN com base finitamente gerada B contida em Kx ([3]). Em [2] Bieri, Neumann e Strebel mostram que se uma tal extensão HNN descrevendo G é ascendente, então todas são. Na verdade, eles mostram que este é o caso se, e somente se, uma determinada classe [x] em (Hom(G,R) \ 0)/R+, onde R+ atua por multiplicação, está em um certo subcon-junto E.
Vamos assumir o seguinte teorema.
Teorema 4.1.1. Suponhamos que (G, x, x) é um sistema aumentado de grupo. Se [x] E E, então para qualquer r o shift associado ((Dr, ar) é finito. Consequentemente, Kx contém apenas uma quantidade finito de subgrupos H com índice IKx : Hl < r para qualquer r < oo.
Notemos que as hipóteses do Teorema 4.1.1 não fazem menção ao elemento dis-tingüido x. De fato, o Teorema 4.1.1 é um resultado sobre pares (G, x) tal que G é um grupo finitamente apresentado e x: (7 —, Z é um epimorfismo. Chamaremos tal par um sistema de grupo.
Lembremos que um grupo G é residualmente finito se a intersecção de to-dos os subgrupos normais de índice finito de G é trivial. Equivalentemente, G é residualmente finito se dado qualquer elemento não trivial g E G, existe um homo-morfismo de G em algum grupo finito tal que g não está no núcleo. Um grupo é hopfiano se todo homomorfismo do grupo sobre ele mesmo é um automorfismo. Um teorema bem conhecido de Malcev estabelece que todo grupo residualmente finito, finitamente gerado é hopfiano.
Teorema 4.1.2 (Teorema de Malcev). Um grupo G residualmente finito, fini-tamente gerado é hopfiano.
Demonstração: Seja O : (7—, G sobrejetora e seja K o núcleo de O. Seja ra qualquer inteiro positivo. Como G é finitamente gerado, o teorema de M. Hall [7] estabelece que existe apenas uma quantidade finita de subgrupos, digamos MI, M2, ,1114 de índice n. Seja In = 0-'(M). É fácil verificar que [(7: = ta. Como as pré-imagens dos Mi são distintas e existe apenas uma quantidade finita de Mi, a coleção dos Li é igual à coleção dos Mi. Então K está contido em todos os M. Mas como ta é arbitrário, K está contido na intersecção de todos os subgrupos de índice finito. Como G é residualmente finito, esta intersecção é {1}. Logo K = {1} e O é um automorfismo.
34

Notemos que a prova do teorema de Malcev requer que o grupo seja finitamente gerado apenas para que se saiba que o número de subgrupos de um índice arbitrário r é finito. O seguinte corolário é imediato.
Corolário 4.1.1. Seja (O, x) um sistema de grupo. Se G é residualmente finito e [x] E E, então Kx é hopfi ano.
Demonstração: Como (0,x) é um sistema de grupo e [x] E E, pelo Teorema 4.1.1, segue que Kx contém apenas uma quantidade finita de subgrupos H de índice IKx : Hl < r para qualquer r finito. Como G é residualmente finito, temos que Kx também é. Assim, pelo Teorema de Malcev, segue que Kx é hopfiano.
Questão 4.1.1. Se G é o grupo de um nó em S3, o subgrupo comutador G' é hopfi-ano?
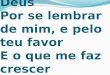
Em vista do fato que grupos de nós são residualmente finitos [14], W. Whit-teu e D. S. Silver esperavam obter uma resposta afirmativa para a Questão 4.1.1, mostrando que o subgrupo comutador de qualquer grupo de nó tem apenas uma quantidade finita de subgrupos com um índice arbitrário finito. Pois desta forma, como G' é residualmente finito, pelo Teorema de Malcev teríamos que G' é hopfia-no. As técnicas deste trabalho, entretanto, mostram que o subgrupo comutador do grupo do nó 52 (Figura 4.1) tem uma quantidade não-enumerável de subgrupos de índice r sempre que r> 3.
Figura 4.1: Nó 52
Para ver isso, consideremos a apresentação de Wirtinger
35

(zi, X2, X3, X4, X5 X1 = X2X5X2-1, X3 = X5X2X5-15 X4 = X1X3X-1 1 5 X2 = X4X1X4-1)
(X2, X4, X5 X4 = X2X5X2-1X5X2X5-1X2X5-1X2-15 X2 = X4X2X5X2-1X4-1) I;s:j
(X22 X5 z2 = z2z5z 1z5z2zi1z2zi1z 1z2z5z 1z2z5z;lzsz lzjlz2zilzn
(X2) X5 z2 = z2z5z2-1z5z2z5-1z2z5z2-1x5x2-1x5-1x2x5-1x2-1) &.-
(X2, X5 z5z 1z5z2zrz2z5z 1z5z 1xj1z2xj1z11)
(X2 X5 z2z5z 1z5z2zrz2z5-1x2-1x5x2-1x5-1x2x5-1).
Fazendo z = z2 e az= = x-1.5, temos que z5 = za. Assim
(z2, z2z5z 1z5z2zilz2zilx2-1x5x2-1x5-1x2xj1) Êd_
(z, a : zzaaza-la-ix-a.
(z, a : x2 a2za-2z-1 az-1 a-2x-1) I-S-
(z, a : z(za2za-2z-1arla-2)x-1).
Assim
(z12 X27 X32 X47 X5 X1 = X2X5X2-12 X3 = X5X2X5-1, X4 = X1X3X-11) X2 = X4X1X4-1)
(z, a : z(za2za-2z-laX-la-2)x-1),
onde z = z2 e a = z-lx5.
Temos que x(x) = 1 e x(a) = O.
Façamos al = ax-x(°) = a. Então, pelo método de Fteidemeister-Schreier, temos
que os geradores de Kx são os elementos olá = ra1x, j E Z; 011 seja, {ai : i E Z},
onde ai = x-iaxi, é o conjunto de geradores de K.
Kx tem rirzi como relator, onde r é o relator da apresentação de G. Temos
que o relator za2za-2z-lax-la-2 é equivalente a x-2(za2za-2z-laX-la-2)x2 =
z-1a2"-2z-larla-2x2. Logo os relatores de Kx são
36

ri c' a2xa-2 ax-i a-2 x2 xi =
a2 xi+i)(x-i a-2 xi)(x-i-1 axi+i)(x-i-2 a-2 =
2 —2 —2 ai+iai ai+ ai+2.
Portanto obtemos a seguinte apresentação para o subgrupo comutador G'
(ai : a4lar2ai+lai:2).
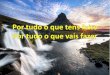
O grafo direcionado 'i"; que descreve o shift representação (, az) é grande, mas podemos apenas entender bem o detalhe na Figura 4.2 que mostra dois ciclos. Qual-quer caminho bi-infinito em f' que passa pelo menos uma vez em volta de cada ciclo corresponde a uma representação transitiva de G' em S4. Pela Proposição 2.1.1 con-cluímos que G' contém uma quantidade não-enumerável de subgrupos de índice 4. Além disso, como cada permutação no círculo interno fixa 4, podemos adicionar um terceiro ciclo, idêntico ao segundo, mas com 5 no lugar de 4, e assim obter um detalhe do grafo direcionado descrevendo (rlis, az) (veja Figura 4.3). Novamente, qualquer caminho bi-infinito que percorre pelo menos uma vez cada ciclo corresponde a uma representação transitiva de G' , desta vez em S5. Este processo pode ser repetido para obter uma quantidade não-enumerável de subgrupos de G' de índice r, para qualquer r > 4. Curiosamente, G' tem apenas uma quantidade finita de subgrupos de índice r < 4.
((1,2,3),(1,3),(2,4)) —a- ((1,3),(2,4),(1,2,4))
---------..................
((1),(1,2,3)) —3. ((1,2,3),0)) ((1,2,4)(1))
1I 1 (0,3,2),W) -E- ((1),( ,3,2)) ((1),(1,4,2))
.a.---------.... U1,3),(2,4),(1,3,2)) ..er-- ( (1,4,2),(1,3),(2,4))
Figura 4.2: Detalhe do gafo de (rh, az)
37

W,3),(2,5),(1,2,5))
((1,2,4),(1))
((1),(,4,2))
((1,5,2),(1,3),(2,5))
((1,2,3),(1,3),(2,5))
((1,2,3),(1,3),(2,4)) ((1,3),(2,4),(1,2,4))
((1),(1,2,3)) ((1,2,3),(1))
((1,3,2),(1)) ((1),(1,3,2)) 1
((1,3)(2,4)(1,3,2)) ((1,4,2),(1,3)42,4))
((1,3),(2,5),(1,3,2))
Figura 4.3: Detalhe do grafo de (<D5, ar)
4.2 Os Grupos de Baumslag-Solitar
Em 1962 Baumslag e Solitar provaram que o grupo
G(m, 7Z) = (x, a : xamx-1 = a")
é não hopfiano sempre que m, ri > 2 são coprimos [1]. Para quaisquer inteiros me n, nós definimos x : G(m,n) —*7 como o homomorfismo tal que x(x) = 1 e x(a) = O. Dessa forma, temos que os geradores do núcleo K(m, n) de x são os elementos ag = x-iaxi e as relações são ri : ar = ar+1; ou seja, K (m, n) = (ai : ar = ar+/). De fato, temos que
x-i(xamx-1)xi = anxi
x-(i-i) = rianxi
ar = ar
Logo Kx = (ai : ar =
38

Utilizaremos o seguinte Lema na demonstração da Proposição 4.2.1.
Lema 4.2.1. Suponha que g é qualquer elemento de ordem finita de um grupo. Se a ordem o(g") = b, e se (a, b) = d, então o(g) = aidb para algum al dividindo a/ d.
Demontração Temos que (e )b= gab = e. Logo o(g)lab. Então existe À E Z tal que Ao(g) = ab.
Por outro lado, de o(g4) = b e (f) < (g) segue que bio(g), ou seja, existe µ E Z tal que pb = o(g). Substituindo o(g) = pb em Ao(g) = ab obtemos Àpb = ab, ou seja, Àµ = a. Portanto, Aia.
Note que (0)" = gq = se(g) = e. Logo o(0)11). (E assim, o(0) b.) Por outro lado, (0) > (g°). Então o(0) < o(g°) = b. Portanto, o(0) = b. Assim, (g R-) (e)
Observemos que ga+k°(9) = gagke) = g° g°(g)k = g°. Assim, a/À + k(ab/À) = a, ou seja, 1 + kb = À. Logo 1 = À — kb. Portanto (À, b) =1.
Como (a, = d, temos que dib. De (À, b) = 1 e dlb, segue que (À, d) = 1.
'Ibmos que Ao(g) = ab, ou seja, Ao(g) = Vtid2 com (a/ d, bl d,c9) = 1. Como À não divide d e bld, segue que À divide a/d.
Logo o(g) = tibd
Basta então chamarmos ai = Àd
Aplicando as técnicas do Capítulo 3, provamos o seguinte resultado.
Proposição 4.2.1. (i)Suponhamos que (m, n) = 1. Então K (Traja) tem um sub-grupo de índice r se, e somente se, (r, na) = (r, n) = 1. Neste caso, existe exatamente um tal subgrupo. (ii)Suponhamos que (ia, n) $ 1. Se r é maior ou igual ao menor primo divisor de In e n, então K (In, n) tem uma quantidade não-enumerável de subgrupos de índice r.
Demonstração: Da relação ar = ar4.1 temos que (ar)T1 = ar2 = ali/ri e ar+21 = ar, (e portanto ar4.22 = CA) ou seja, ar? = a 2. Da mesma forma temos ar3 = a = (ari.2)"
2 = (a7+3)112 = ar+33 . Prosseguindo desta forma mostramos que
39

(4.1)
para todo k > 1.
Seja p uma representação transitiva de K (na , n) em S, e denotemos a permutação p(ai) por j. Como S é finito, temos que A = A_Ft para algum s e t > 1. Então por (4.1), temos
= [P(as)] nt Mart = Katal-Ft = [P(a -Fet = 14' = •
Seja 1 a ordem de A em S. Como pr` = prit segue que 11(mt — nt). Como, por hipótese, (m,n) = 1, devemos ter (1, m) = (1,n) = 1.
Afirmação: Todas as permutações pi têm ordem 1.
Desta afirmação segue que podemos resolver a equação pr = prg, obtendo = prh, onde v é tal que vm = 1; ou pi+i = p, onde q é tal que qn = 1.
Consequentemente todas as permutações A são unicamente determinadas como potências de uma única permutação po. Como a representação p é transitiva, po deve atuar transitivamente sobre {1, , r}, então 1 = r e, a menos de automorfismo interno de S,., podemos assumir que po = (1, 2, ... ,r). Então (r,m) = (r, n) = te, como já vimos anteriormente, os subgrupos Hi = ir(A) são todos iguais já que são potências de po.
Provemos agora a afirmação. É suficiente mostrar que se algum A tem ordem 1, com (1,m) = (1,n) = 1, então pi+1 e também têm ordem 1.
Suponhamos que A tem ordem 1. Como (1, m) = 1, temos que 1 = o(pr) = o(pr+1)• Usando o Lema 4.2.1, o(pi+i) = nj./, onde ni divide n. Então n1/ = o(pr) = o(pr+2)• Novamente usando o Lema 4.2.1, o(pi+2) = n2n?1, onde n21(n/ni)• Continuando desta maneira, concluímos que a ordem de flue é divisível por nt. Como a ordem é limitada por r, devemos ter ni = 1 e o(A+1) = 1.
O mesmo argumento mostra que o(pi_i) = 1. Isto completa a prova de (i).
40

Provemos agora (ii). Seja p> O primo dividindo m e n, e suponha que r > p. Seja S o conjunto de todos os elementos de Sr que são produtos de j,-ciclos disjuntos. Incluímos o "produto vazio" (1), de forma que a cardinalidade de S é maior ou igual a 1 sempre que r = p = 2. Então (in az) contém o full shift sobre os elementos de S. É fácil ver que uma quantidade não-enumerável de elementos deste shift correspondem a representações transitivas de K(m, n) em S. Usando a Proposição 2.1.1 vemos que K(m, n) contém uma quantidade não enumerável de subgrupos de índice r.
4.3 Um Invariante de Entropia para (G, X)
Na Seção 4.1 vimos que se (a, x, s) é um sistema aumentado de grupo, então algumas conclusões sobre os shifts representação associados (c r, az) podem ser de-duzidas a partir apenas do par (G, x). A classe de conjugação do shift (c r, az) é, na verdade, independente da escolha do elemento distingüido x? O Exemplo 4.3.1 mostra que a resposta é não.
Exemplo 4.3.1. Consideremos o sistema aumentado de grupo (G,x,x), onde G é o grupo livre sobres e a, e x : G Z é o epimorfismo determinado por x 1-* 1, a 1-4. O. O núcleo Kx é livre com geradores ai, i E Z, onde ai denota x-laxi. Claramente o shift representação associado (13, az) é conjugado ao full 6-shift. Este shift tem exatamente 6 pontos fixos, correspondentes às representações p: aj 1-4. 4), para todo i E Z, onde 4) é qualquer permutação em S3.
Agora considere o sistema aumentado de grupo (G,x,y), onde y = sar'a's. Para estudar o shift representação associado (ca, ay), primeiro aplicamos uma se-qüência de transformações de Tietze à apresentação (x, a :) para G
(x, a :) = (x, a, b, y : b = ax-1 a-1 x, y = xb) eàs (a, b, y : b = aby-la-lyb-1).
Depois aplicamos o método de Reidemeister-Schreier à última apresentação. To-mando si = a e xz = b, temos que ai = xiy-x(zi) , ou seja, a1 =aea2 = b. Os geradores de Kx são os elementos ctij com i = 1,2 e j E Z, onde aid = riaiyi; ou seja, {ai, b i E Z} é o conjunto de geradores de Kx, onde ai = y-iayi e bi = Os redatores de Kx são da forma y-iryi, onde r é o relator da apresentação de G.
41

{y-iryi} = {y-ibyi = y-iaby-'a-lyb-lyi} tr.
{bi = =
{bi =
Assim, obtemos uma apresentação (ai, b b = aibiar+libi-1) para Kx, onde ai agora denota riayi, e da mesma forma bi denota y-ibyi. É fácil verificar que
arj) tem 6 pontos fixos correspondentes às representações p: bi (1), onde E 53. Entretanto, (es, a) tem mais 6 pontos fixos
(1, 2) , (1, 2, 3) (2,3) , (1,2,3) (1,3) , (1,2,3) (1,2) , (1,3,2) (2,3) , (1, 3, 2) (1,3) , (1, 3, 2)
Como shifts conjugados têm o mesmo número de pontos fixos,(4 3, az) e (.X.3, não são conjugados.
Definição 4.3.1. Shifts de tipo finito são finitamente equivalentes se existir um shift de tipo finito que se aplica sobre cada um por aplicações que são finito a um.
A equivalência finita é uma forma mais fraca de equivalência que a conjugação [6]. Entretanto, é uma noção útil.
Definição 4.3.2. A entropia de um shift pode ser definida como Um sup* logIENi, onde 'NI é o número de N-blocos permitidos do shift.
Shifts conjugados têm a mesma entropia. Na verdade, shifts finitamente equiva-lentes também têm a mesma entropia.
Teorema 4.3.1. Suponhamos que (G,x,x) e (G,x,y) sejam sistemas aumentados de grupos que diferem apenas na escolha dos elementos distingiiidos x e y. Então para cada r > O, os shifts associados a.) e (r, c) são finitamente equivalentes.
42

Demonstração: Lembremos que é o conjunto de representações p: Kx S,. As aplicações az e ay são definidas por a,p(g) = p(rigx) e ayp(g) = p(y-igy), para todo g E Kr Podemos escrever y = xb para algum elemento b E Kr Usaremos o seguinte Lema.
Lema 4.3.1. Para n> 0, temos
ar p(g) = [p(bn_i • • • b1bo)]-1(9,5(9)[P(bn-i • • • Mo)]
e a'y-n p(g) = [p(b,s _i • • • bibo)]or P(9)[P(bn-1 • • • bibor
onde 11/4 = x-nbxn
Definamos O, como o espaço produto c r x Sr, onde Sr tem a topologia discreta, e definamos T : O,. —> O,. por T (p, ir) = (ax p, p(b)r). T é claramente contínua, já que cada uma das suas coordenadas é. Notemos que Tn(P, ir) = (<77x1P, P(bn•-1 ...bo)r) e T-n(p, ir) = (ajn p,[p(bn_i bo)]-17r), se n > O. Segue que a projeção na primeira coordenada pi : 6r —> r induz uma aplicação r! a um de (0,,T) sobre (cDr, (74• Também, f: O,. definida por f (p, ir) = Kr induz uma aplicação de (O,., T) sobre (cDr, co). A aplicação f é também r! a um já que f (p) = {(irpr -1) ir E sr}.
Para completar a prova do Teorema 4.3.1 é suficiente mostrar que o sistema dinâmico (0,5 T) é conjugado a um shift de tipo finito. Como na demonstração do Teorema 3.0.1, obtemos uma apresentação Nd : para Kx correspondente à apresentação (x, a Ro) para G. Aplique Or em um shift com alfabeto {(p0,101 po é uma função de Ao em ir E Sr} mandando (p, ir) em (Pi, ri), onde pi = Ao, Iro = ir, e (indutivamente) 7ri+i = p(b)ir. Se b = bo = w(a_b. • • , ai) é uma palavra nos ai, então bi = w(ai_i, , ai.4.1) e p(b) = w(ps _i, , ps+i). Então a condição
= p(b)ir é uma condição de tipo finito (isto é, uma condição que pode ser verificada examinando-se os blocos de um tamanho fixo), e a imagem de O, é um shift de tipo finito. É fácil verificar que esta aplicação é uma conjugação. De fato, temos
RP1 O TXP, 7r)}(9) = [PdasP, p(b)i1-)](g) = asp(g)
e
Raz ° P1)(P, /)1(9) = azP(9)
43

Portanto, RN 0 T)(P, ir)] = [(az 0 PI) (P, Ir)].
Temos também que
[( f o T)(p,r)](g) = [ f (az p, p(b)701(g) =
([p(b)it (az p)[p(b)d)(g) = [p(b)71-lazp(g)[p(b)ir]
Ray o f (p 11.)] (g) = [ay (7r. prol (g) = (71.~.1. p7r) (y ~.1 g y) = 71. -114-Igor =
= 71.--1.1*-1)p(x-igx)p(b)71. = [p(b)71.]-1.a.p(g)[p(b)711
Portanto, [(f o T)(p, ir)] = [(as, o f)(p, ir)].
Demontração do Lema 4.3.1 : Temos que
ayp(g) = p(ri gy) = p(b-1x-1 gxb) = p(b6-1 x-1 gxbo) = p(bõl)p(x-1 gx)p(b0) = [p(b0)]-1.a.p(g)[p(b0)]
a I, p(g) = p (g)) = ay (p(y.- lgy)) = p (r2gy2) = p(tr 1 r =
xx-2 gx2 x-1 bxb) = p(b-1 x-1 b-1 x)p(x-2 gx2)p(x-ibxb) =
ç (p(x-ibxb))-1 xx-2gx2,) #1( x- lbxb)) = [p(bibo)]-1a5(g)[p(bibo)].
Suponhamos que
—n-1Pkg
-‘ = [ p(bn 2 ...bibo)].-i.ar. p(g)[p(bn_2 mo)].
Notemos que
bibo = (x-ibxj)(x-U-1)bxj-1) (x-ibx)b = (bx) . . . (bx)b.
(j-1)—vezes
Então
44

Crtylp(g) = Cry (Cfr —1P(g)) = CrY UP(bn-2 b1b0)] —1Cr7z1-1P(g)[P(bn-2 =
(h) (bx)m)) =
(n-3)—vezes (n-3)—vezes
au(p(b_i (x-lb-1) (x_i ri) xn_2)p(x_(n_i)gxn_i) [p(x-N-2) (bx) . . . (bx) b))) =
(n-3)—vezes (n-3)—vezes
a y(p(b-I (x-lb-1) . . . (x-lb-1) xn-2 x-(n-1) gxn-'x-('2) (bx) . . . (bx) b)) =
(n-3)—vezes (n-3)—vezes
Cry(p(b-1 (X—lb-1) . . . (X —lb-1) Xn-1X—ngXnX—(n-1) (bx) . . . (bx) b)) =
(n-3)—vezes (n-3)—vezes
p(y—lb—I (x— lb-1) (x—lb )—I` xn—I CrigXnX—(71-1) (bX) . . . (i9X) by) =
(n-3)—vezes (n-3)—vezes
(x-ib--1) xn--1 x-n g xn x-(n-1) (bx) . • . (bx) bxb) =
(n-3)—vezes (n-3)—vezes
p(b-1 (x-1 b-1) . • . xn-1 x-n gxn x-(n-1) (bx) . • . (bx)b) =
( (n-2)—vezes n-2)—vezes
p(b-1 (x-1 b-1) . .(c'b-I) 11-1) p(x n gxn)p(x-(71-1) (bx) b) =
(n-2)—vezes (n-2)—vezes
(bx) b))-1 p(g)(p(x-(n-1) (bx) . . . (bx) b)) =
(n-2)—vezes (n-2)—vezes
(P(bn-4 • • • bibo))-laLIP(9)(P(bn-1 • • • Mo)).
45

De forma análoga mostramos que
cr;r5(.9) = [P(11/4-1 . ..bibo)]cf:n P(.9)[P(bn-1 • • • blbo)]-1 •
Observação 4.3.1. A demonstração acima mostra mais que a afirmação do Teo-rema 4.3.1. Existe um shift de tipo finito que se aplica de forma constante a um sobre cada (er, az) e (.,., av).
Definição 4.3.3. Um sistema de grupo é um par (G, x) consistindo de um grupo finitamente apresentado G e um epimorfismo x : G —> Z. Dois sistemas de grupos (G, x) e (G', x') são isomorfos se existir um isomorfismo h : G —> G' tal que X= X' ° h•
Corolário 4.3.1. Seja (G, x, x) um sistema aumentado de grupo, e seja r um in-teiro positivo. A entropia h(er) do shift representação associado ($,., o4é um invariante do sistema de grupo (G, x); ou seja, a entropia depende apenas da classe de isomorfismo do sistema de grupo.
O Corolário 4.3.1 pode ser usado para definir uma seqüência de "invariantes de entropia" para n-nós. Um n-nó é uma n-esfera K mergulhada suavemente na (n+2)-esfera STI+2. Aqui n-nós são assumidos orientados. Seja N(K) uma vizinhança de K que é difeomorfa a S" x 1)2. O fecho X (K) de Sn+2\N(K) é chamado exterior de K. Dois n-nós são equivalentes se existir um difeomorfismo de Sn+2 ela 573+2 que leva um n-nó no outro (preservando orientações). N-nós equivalentes são identificados. Um invariante de n-nó é uma quantidade que é definida para um n-nó e depende apenas do nó a menos de equivalência.
Todo n-nó K determina um sistema aumentado de grupo (ver [10]). De fato, seja G = ri (X (K), *), onde o ponto base está no bordo 8X(K), e seja x o elemento de G representado por uma curva fechada simples m c 8X(K) com sua orientação induzida por K (a curvam é chamada um meridiano de K). Pela unicidade a menos de isotopia da vizinhança tubular, o elemento x é bem definido por K. Fazendo x :a —> Z o homomorfismo abelianização que leva x em 1, obtemos um sistema aumentado de grupo (G, x, x). Associado a K fica definida uma seqüência de shifts {.,.(K)},̀."._, e uma seqüência correspondente de entropias {14.(K)}.
Estes shifts e entropias são invariantes dos nós. Revertendo a orientação de K produzimos um novo n-nó (orientado) R.K. O sistema aumentado de grupo de RK
46

é (G,—x,x-1). Para qualquer r > 1 existe uma bijeção de cD,.(K) em mandando toda palavra bi-infinita (pi) no seu inverso (p_i). Então segue que as entropias h.,(K) e ht(RK) são iguais, ou seja, estes invariantes não detectam a orientação do nó.
47

Referências Bibliográficas
[1] BAUMSLAG, G., SOLITAR, D., Some two-generator one-relator non-Hopfian groups, Bulletin of the American Mathematical Society, n. 68, p. 199-201, (1962).
[2] BIERI, R., NEUMANN, W.D., STREBEL, R., A geometric invariant of discrete groups, Inventiones Mathematicae, n. 90, p. 451-477, (1987).
[3] BIERI, R., STREBEL, R., Almost finitely presented soluble groups, Commen-tarii Mathematici Helvetici, n. 53, p. 258-278, (1978).
[4] CROWELL, R.H., Fox, R.H., introduction to Knot Theory, Springer-Verlag, New York, (1977).
[5] GONZÁLEZ-ACUNA, F., WHITTEN, W., Imbeddings of 3-manifold groups, Memoirs of the American Mathematical Society, n. 474, (1992).
[6] LIND, D., MARCUS, B., An Introduction to Symbolic Dynamics and Coding, Cambridge University Press, Cambridge, (1995).
[7] LYNDoN, R.C., SCHUP, P.E., Combinatorial Group Theory, Springer-Verlag, Berlin, (1977).
[8] RAPAPORT, E.S., Knot-lilce groups, Armais of Mathematical Studies, n. 84, p. 119-133, (1975).
[9] ROLFSEN, D., Knots and Linha, Mathematics Lecture Series 7, Publish or Perish, Inc., Berkeley, (1976).
[10] SILVER, D.S., Augmented group systems and n-knots, Mathematische An-nalen, n. 296, p. 585-593, (1993).
48

[11] SILVER, D.S., Knot invariants from topological entropy, Topology and its Ap-plications, n. 61, p. 159-177, (1995).
[12] SILVER, D.S., Growth rates of n-knots, Topology and its Applications, n. 42, p. 217-230, (1991).
[13] SILVER, D.S., WILLIAMS, S.G., Augmented group sysytems and shifts of finite type, Israel Journal of Mathematics, n. 95, p. 231-251, (1996).
[14] THURSTON, W.P., Kleinian groups and hyperbolic geometry, Bulletin of the American Mathemati cal Society, n. 6, p. 357-381, (1982).
49