Embed Size (px)
Citation preview
UNIVERSIDADE TUIUTI DO PARANÁ
CURSO DE ENGENHARIA MECÂNICA
RICARDO CHIBIOR
YAGOZENI
DUPLICADOR DE VAGAS: OTIMIZAÇÃO DO ESPAÇO FÍSICO EM GARAGENS PREDIAIS PARA
O ESTACIONAMENTO DE MOTOS
CURITIBA 2016

RICARDO CHIBIOR
YAGO ZENI
DUPLICADOR DE VAGAS: OTIMIZAÇÃO DO ESPAÇO FÍSICO EM GARAGENS PREDIAIS PARA
O ESTACIONAMENTO DE MOTOS Trabalho de Conclusão de Curso apresentado ao Curso de Graduação em Engenharia Mecânica da Universidade Tuiuti do Paraná, como requisito parcial para a obtenção do título de Engenheiro Mecânico.
Orientador: Prof. Tiago José Antoszczyszyn.
CURITIBA 2016

RESUMO
O acelerado crescimento da população associado à facilidade na compra de carros, e a falta de planejamento urbano, agravou o problema de estacionamento de veículos em áreas centrais, como também o congestionamento no trânsito. Isso fez com que as pessoas buscassem meios para facilitar o seu deslocamento com rapidez, adquirindo também as motos. Face a isso, a vaga de garagens em prédios que comportem o número destes veículos e motos adquiridos pelos seus moradores tornou-se um problema. Na busca de aperfeiçoar o local atribuído ao abrigo de veículos leves, apresentou-se um produto destinado à duplicação de vagas de estacionamento ou garagens. O objetivo deste trabalho foidesenvolver, projetar e construir, na forma de protótipo do dispositivo padrão, um duplicador de vagas de garagem para moto. Fez-se o uso das ferramentas e metodologia para elaboração de projetos, tais como, o Benchmarking, atrelado à Pesquisa de Mercado, na qual foi obtida uma visão geral para o início da concepção do projeto. O uso dos resultados obtidos na pesquisa mercadológica, aplicado no modelo de Casa da Qualidade, determinou as características mais importantes que deveriam estar contidasno tipo de sistema escolhido e, consequentemente, bases - cálculos - para a elaboração do protótipo a ser desenvolvido. Posteriormente, o protótipo foi fabricado, e constatada a sua funcionalidade e segurança. Deste modo, procurou-se atender de maneira satisfatória a maioria dos futuros usuários. As metodologias utilizadas foram: bibliográfica, efetivada mediante o levantamento de dados cujas fontes foram artigos, livros, revistas especializadas e materiais disponíveis na internet; a abordagem foi qualitativa; quanto ao objetivo, é exploratória por observar uma realidade já existente. É considerada dedutiva, de acordo com o pensamento.Resultado: o dispositivo padrão pode ser aplicado aos mais diversos públicos e locais, além de possibilitarmais facilidade, praticidade, e economia aos usuários.Aotimização de espaços, contemplamuma solução completa para as pessoas que possuem mais de um veículo, porém não dispõem o número suficiente de vagas de garagens.Algumas melhorias poderão ser efetivadas, porém com custos mais elevados. Palavras-chave: Duplicador. Vaga. Sistemas. Motocicleta.

LISTA DE SÍMBOLOS
V - Força Cisalhante
M - Momento Fletor
𝑌𝑚á𝑥̅̅ ̅̅ ̅̅ - Posição da Linha neutra
𝐼𝑙𝑛 – Momento de inércia da linha neutra
b - base da secção analisada
h - altura da secção analisada
A - área da secção analisada
Q - Momento estático da área localizada a cima ou abaixo da linha neutra
𝜏 – Tensão de cisalhamento
V – Tensão cisalhante máxima
I – Momento de inercia
CA - Corrente Alternada
CC - Corrente Contínua
FEM - Força Eletromotriz
i - Corrente
T - Torque
ω - Velocidade Angular
CV - Cavalos de Potência
P - potência
U - Tensão
a - Ampere
𝜆- Índice de Esbeltes
𝑖2- Raio Mínimo de Inércia da Secção Transversal
µ - Coeficiente de Flambagem
𝜚 - Índice de Excentricidade
d- diâmetro do fuso
P - passo do fuso
dc - diâmetro do colar
N - Número de Roscas Efetivas
Cm - Circunferência Média
Ф - Deformação angular
Tr - Torque no fuso

J - Momento polar de inercial
G - Módulo de Elasticidade transversal
v - Velocidade de Elevação

LISTA DE QUADROS
QUADRO1 - PRINCIPAIS CARACTERÍSTICAS ENTRE OS PRODUTOS
SIMILARES ...................................................................................... 16
QUADRO2- MODELOCONCEITUALQFD ........................................................... 21
QUADRO3- RESULTADO QFD ........................................................................... 23
QUADRO4- ESCOLHA DO SISTEMA ................................................................. 24
QUADRO 5- SISTEMA HIDRÁULICO .................................................................. 25
QUADRO 6 - SISTEMA MOVIDO POR CORRENTE ............................................ 25
QUADRO 7 - SISTEMA ELEVAÇÃO POR CORRENTE ....................................... 26
QUADRO 8 - SISTEMA ESCOLHIDO ................................................................... 27
QUADRO 9 - APLICAÇÃO DAS ROSCAS ............................................................ 43
QUADRO 10 - DIÂMETRO PASSO E COMPRIMENTO ......................................... 46
QUADRO 11 - DIMENSÃO DE DIÂMETRO PASSO DOFUNDO ........................... 54

LISTA DE TABELAS
TABELA 1- LEVANTAMENTODASNECESSIDADES ............................................. 18
TABELA 2 - COEFICIENTE DE ATRITO PARA COMBINAÇÃO DO MATERIAL
DO PARAFUSO/PORCA ................................................................... 44
TABELA 3 - SECÃO DE CORREIAS EM V............................................................. 48
TABELA 4 - MOMENTO DE INÉRCIA ................................................................... 50
TABELA 5 - ORÇAMENTO FINAL .......................................................................... 53
LISTA DE FIGURAS
FIGURA 1 - MODELO DO DUPLICADOR ......................................................... 30
FIGURA 2 - DISTRIBUIÇÃO DAS TENSÕES DE FLEXÃO .............................. 32
FIGURA 3 - DISTRIBUIÇÃO DAS TENSÕES CISALHANTES ......................... 32
FIGURA 4 - APOIO DO ROLAMENTO VIGA W 130x 13,5 ............................... 35
FIGURA 5 - ROLAMENTO DE ESFERA DE CONTATO ANGULAR ................ 35
FIGURA 6- FUSO APOIADO NO ROLAMENTO .............................................. 36
FIGURA 7 - PLACA AC3 ................................................................................... 38
FIGURA 8- CHAVE FIM DE CURSO ................................................................ 38
FIGURA 9 - SISTEMAS: INSTÁVEL E ESTÁVEL ............................................. 39
FIGURA 10 - COMPRIMENTO DE FLAMBAGEM .............................................. 40
FIGURA 11 - APLICAÇÃO DE CARGA EXCÊNTRICA ....................................... 42
FIGURA 12 - PARAFUSOS DE AVANÇO COM PORCAS ESPECIAIS .............. 44
FIGURA 13 - REPRESENTAÇÃO DE UMA ROSCA COM QUATRO
ENTRADAS ................................................................................... 45
FIGURA 14 - CORREIAS EM V .......................................................................... 47
FIGURA 15 - REPRESENTAÇÃO DE UM CORPO A UMA DISTÂNCIA R
DE SEU EIXO DE ROTAÇÃO ....................................................... 50
FIGURA 16 - CARACTERÍSTICAS DE SOLDA .................................................. 52
FIGURA 17 - SOLDAS E TIPOS DE CARREGAMENTOS ................................. 52
FIGURA 18 - CARACTERÍSTICAS DAS ROSCAS TRAPEZOIDAIS .................. 55
FIGURA 19 - DIMENSÕES DA PORCA CILÍNDRICA ......................................... 55
FIGURA 20 - DIMENSÕES DA PORCA QUADRADA ......................................... 56
FIGURA 21 - MOTOR WEG W22 IR2 ................................................................. 61
FIGURA 22 - FIXAÇÃO DO MOTOR ................................................................... 62
FIGURA 23 - FORÇAS ENTRE MOTOR ELÉTRICO E FUSO GIGANTE .......... 63
FIGURA 24 - ESQUEMA BRAÇOS ..................................................................... 64
FIGURA 25 - ESFORÇOS CORTANTES NOS BRAÇOS ................................... 66
FIGURA 26 - MOMENTO FLETOR NOS BRAÇOS ............................................ 66
FIGURA 27 - ÁREA DE SECÇÃO DO TUBO DOS BRAÇOS ............................. 67
FIGURA 28 - ESFORÇOS NA VIGA ................................................................... 68
FIGURA 29 - ESFORÇOS CORTANTES NA VIGA ............................................ 68
FIGURA 30 - ESQUEMA MOMENTO FLETOR NA VIGA ................................... 69

FIGURA 31 - SECÇÃO DA VIGA ........................................................................ 69
FIGURA 32 - ROLAMENTO RÍGIDO DAS ESFERAS ......................................... 71
FIGURA 33 - ROLAMENTOS 6002 ..................................................................... 71
FIGURA 34- ESQUEMA TEÓRICO DO ROLAMENTO DE CONTATO
ANGULAR ...................................................................................... 72
FIGURA 35 - SENTIDO DE APLICAÇÃO DE FORÇA NO ROLAMENTO
DE ESFERAS DE CONTATO ANGULAR ...................................... 72
FIGURA 36 - ESQUEMA DE ROLAMENTO 73005 BE ....................................... 73
FIGURA 37 - VISTA ISOMÉTRICA GERAL ........................................................ 74
FIGURA 38 - INTERLIGAÇÃO ELÉTRICA .......................................................... 75
FIGURA 39 - PEÇAS OXICORTADAS, TORNADAS, FRESEADAS
E SOLDADAS ................................................................................ 77
FIGURA 40 - FABRICAÇÃO DA BASE ESTRUTURAL ...................................... 78
FIGURA 41 - FABRICAÇÃO DOS BRAÇOS DE SUSTENTAÇÃO ..................... 78
FIGURA 42 - MANCAL E ROLAMENTO ANGULAR ........................................... 79
FIGURA 43 - SISTEMA DE RODÍZIO ................................................................. 79
FIGURA 44 - MANCAL AUTOCOMPENSADOR ................................................. 80
FIGURA 45 - MONTAGEM DO QUADRO ELÉTRICO ........................................ 81
FIGURA 46 - QUADRO ELÉTRICO .................................................................... 81
FIGURA 47 - BASE ESTRUTURAL ..................................................................... 82
FIGURA 48 - BRAÇOS DE SUSTENTAÇÃO ...................................................... 82
FIGURA 49 - MEDIDA DO COMPRIMENTO DO CORPO DE PROVA ............... 88
FIGURA 50 - DIÂMETRO DO CORPO DE PROVA ............................................ 89
FIGURA 51 - COMPRIMENTO APÓS A PRÉ-CARGA ....................................... 89
FIGURA 52 - RESULTADOS DA CARGA MÁXIMA DE COMPRESSÃO ........... 90
FIGURA 53 - FORÇA DE COMPRESSÃO PELA DEFORMAÇÃO ..................... 90
FIGURA 54 - COMPRIMENTO FINAL APÓS O CARREGAMENTO .................. 91
SUMÁRIO
1 INTRODUÇÃO ........................................................................................... 12
2 FERRAMENTAS UTILIZADAS PARA AVALIAR NECESSIDADES ......... 15
2.1 BENCHMARCHING DO PRODUTO .......................................................... 15
2.2 PESQUISA DE MERCADO ........................................................................ 17
2.2.1 Coleta de dados.......................................................................................... 17
2.2.2 Organização e registro de dados ................................................................ 18
2.2.3 Resultados .................................................................................................. 18
2.3 CASA DA QUALIDADE .............................................................................. 20
2.3.1 Estrutura ..................................................................................................... 20
2.3.2 Resultados .................................................................................................. 22
2.4 MATRIZ DE DECISÃO ............................................................................... 24
3 SOLUÇÕES PROPOSTAS ........................................................................ 27
4 MODO DE FALHA E ANÁLISE DOS EFEITOS ........................................ 28
5 BASES CONCEITUAIS RELACIONADAS AO DO DUPLICADOR
DE VAGAS PARA MOTOS ........................................................................ 30
5.1 DUPLICADOR DE VAGA ........................................................................... 30
5.2 FORÇA CISALHANTE E MOMENTO FLETOR ......................................... 31
2.2.1 Variação das tensões ao longo de uma viga .............................................. 31
5.3 MANCAIS ................................................................................................... 34
5.4 MOTOR ELÉTRICO E A ELETROMAGNÉTICA DE ENERGIA ................. 36
5.5 DISPOSITIVOS DE ACIONAMENTO ......................................................... 37
5.5.1 Chave Fim de Curso ................................................................................... 39
5.6 FLAMBAGEM ............................................................................................. 39
5.6.1 Dimensionamento ....................................................................................... 39
5.6.2 Tensão de flambagem elástica ................................................................... 40
5.6.3 Flambagem não elástica em estrutura metálica ......................................... 41
5.6.4 Carga excêntrica......................................................................................... 42
5.7 TRANSMISSÃO POR PARAFUSO DE POTÊNCIA ................................... 43
5.8 REDUTORES DE VELOCIDADE ............................................................... 46
5.8.1 Transmissão por correias ........................................................................... 47
5.8.2 Polias .......................................................................................................... 49
5.9 MOMENTO INÉRCIA ................................................................................. 49

5.9.1 Teorema dos eixos paralelos ...................................................................... 50
5.10 SOLDA ....................................................................................................... 51
5.10.1 Solda Mig .................................................................................................... 51
5.10.2 Superfícies soldadas e carregamentos diretos ........................................... 51
6 CUSTOSFINAIS DO PROTÓTIPO DO DUPLICADOR ............................. 53
7 CÁLCULOSESTRUTURAIS ...................................................................... 54
7.1 DIMENSIONAMENTO DO FUSO ............................................................... 54
7.1.1 Cálculo do torque........................................................................................ 59
7.1.2 Cálculo de deformação angular devido ao torque no fuso .......................... 60
7.2 DIMENSIONAMENTO DO MOTOR ........................................................... 61
7.3 DIMENSIONAMENTO DO REDUTOR ....................................................... 62
7.4 DIMENSIONAMENTO DE TEMPO DE ELEVAÇÃO .................................. 63
7.5 DIMENSIONAMENTO DA VELOCIDADE DE ELEVAÇÃO ........................ 64
7.6 CÁLCULOS ESTRUTURAIS ...................................................................... 64
7.6.1 Esforços aplicados nos braços de sustentação .......................................... 64
7.6.2 Tensões aplicadas ao braço de sustentação .............................................. 66
7.6.3 Tensões aplicadas a viga de sustentação .................................................. 68
7.7 DEFINIÇÃO DE MANCAL DO ROLAMENTO DE ESFERA ....................... 70
7.7.1 Mancal superior .......................................................................................... 70
7.7.2 Mancal inferior ............................................................................................ 71
8 DESENHOS TÉCNICOS ............................................................................ 74
8.1 CIRCUITO ELÉTRICO ............................................................................... 75
9 PROTÓTIPO DO DUPLICADOR DE VAGAS ............................................ 77
9.1 PRODUÇÃO DO PROTÓTIPO................................................................... 77
9.2 PROCESSO DE FABRICAÇÃO ................................................................. 78
9.3 INSTALAÇÃO ELÉTRICA .......................................................................... 80
9.4 MODO DE FUNCIONAMENTO DO PROTÓTIPO ...................................... 82
9.5 MANUAL DE INSTALAÇÃO E OPERAÇÃO .............................................. 83
9.5.1 Transporte .................................................................................................. 83
9.5.2 Instalação ................................................................................................... 84
9.5.3 Operação .................................................................................................... 84
9.5.4 Manutenção ................................................................................................ 85
9.5.5 Limpeza ...................................................................................................... 85
9.5.6 Utilização correta ........................................................................................ 85

9.5.7 Garantia ...................................................................................................... 86
9.6 APLICAÇÃO DAS NORMAS REGULAMENTADORAS ............................. 86
10 TESTES E ENSAIOS ................................................................................. 88
10.1 CÁLCULOS DA TENSÃO DE ESCOAMENTO E DEFORMAÇÃO
ESPECÍFICA .............................................................................................. 92
10.2 CONCLUSÃO DO ENSAIO ........................................................................ 93
11 CONCLUSÃO............................................................................................. 94
REFERÊNCIAS ....................................................................................................... 97
ANEXO A ............................................................................................................... 102
APÊNDICEA .......................................................................................................... 103
APÊNDICE B ......................................................................................................... 104
APÊNDICE C ......................................................................................................... 106
APÊNDICE D ......................................................................................................... 107
APÊNDICE E ......................................................................................................... 108
APÊNDICE F .......................................................................................................... 109
APÊNDICE G ........................................................................................................ 110

12
1 INTRODUÇÃO
De acordo com os dados fornecidos pelo Departamento Nacional de
Transito (DENATRAN) de dezembro de 2010 a julho de 2015, a frota de
automóveis registrados no país apresentou um crescimento de 26,6 milhões.
Com o intuito de amenizar os danos crescentes dos sistemas viários o
Governo Federal sancionou em 2012, com prazo final para abril de 2015, a
Política Nacional de Mobilidade Urbana, Lei 12.587/2012, a qual obriga os
municípios com mais de vinte mil habitantes a desenvolverem e aplicarem um
plano de mobilidade urbana - Art. 24 § 1. Entre outras disposições legais,
destaca-se o Art. 3,§3, item VI - equipamentos e instalações, por se
relacionarem com o assunto desta pesquisa (BRASIL, 2012).
Devido a esse crescimento,do número de carros a circular nas grandes
cidades brasileiras,a população buscou soluções para se locomover com
rapidez e agilidade, de modo a fugir dos congestionamentos, optando por
possuir as duas formas de deslocamento, seja de carro ou motos (GLOBO
ECOLOGIA, 2014).
Face a isso, a vaga de garagens em prédios que comportem o número
desses veículos e motos adquiridos pelos seus moradores, tornou-se um
problema. A garagem é considerada uma unidade autônoma e faz parte da
área comum do imóvel. Uma vaga de garagem, em Curitiba, pode custar entre
R$ 20 e 50 mil e, esse valor é adicionado ao preço da unidade com base em
seu custo de construção. Já o aluguel mensal de um local para o carro ou moto
varia conforme a localização do imóvel, mas pode ser encontrado por até
350,00 reais(EXAME, 2015). Isto é,o aumento populacional (maior densidade
demográfica por m²) associado a facilidade e ao poder de compra, fez com que
qualquer pequeno espaço físico seja valorizado.
Devido a esses contextos, a engenharia mecânica, em conjunto com
outras áreas de saberes, poderá intervir nessa realidade, de modo a viabilizar
opções, com base desenvolvimento científico-tecnológico, e projetar para as
construções, ou adaptações para as mais antigas, espaços para as garagens
de carros em conjunto com motos, desses prédios (SECRETARIA DE
EDUCAÇÃO MÉDIA E TECNOLÓGICA, 2000). Para melhor compreensão
desta intervenção, determinou-se o objetivo a seguir.

13
Desenvolver, projetar e construir, na forma de protótipo em escala o
dispositivo padrão, um duplicador de vagas de garagem.
Os objetivos específicos traçados para o desenvolvimento deste estudo
foram: conceituar o sistema duplicador de vagas; descrever os conceitos de
Benchmarking, Análise Mercadológica, e Casa Qualidade; avaliar os resultados
do ambiente em estudo: Matriz de Decisão; estabelecer a solução proposta;
relacionar os conceitos correlatos ao processo de execução do protótipo do
duplicador; desenvolver um protótipo do duplicador de vaga para moto.
Desta forma, vistos as possíveis dificuldades na organização dos
espaços físicos para vagas de estacionamento prediais, e a necessidade de
suas capacidades, são possíveis determinados investimentos que propiciem
sua duplicação: otimização X custo X benefício = a economia.
A escolha do tema é baseada no modelo da prática da utilização de
elevadores automotivos,para que seja dobrada a capacidade de
armazenamento de veículos, devido à escassez de terrenos e a valorização do
metro quadrado - uma maneira prática para sanar a falta de espaço.
Nesse sentido, a responsabilidade das empresas especializadas em
layout de garagens e estacionamentos, no quesito ambiental, emerge como
uma alternativa cada vez mais crescente de se colocar em prática projetos que
diminuam o dano causado pela ação humana no meio ambiente. Isto é, uma
contribuição, que está incorporada às políticas empresariais do país, e que
beneficiam a sociedade como um todo.
O estudo é relevante pois, com base neste panorama, a finalidade de
criar e disseminar modelos inovadores - duplicadores de vagas -, adeptos a
uma visão estratégica integrada entre o desenvolvimento tecnológico e política
de desenvolvimento urbano e social, é eminente. Quer dizer, é pautada na
Política Nacional de Mobilidade Urbana que, entre os seus objetivos procura
estimular o desenvolvimento tecnológico associado a sustentabilidade, de
forma a minimizar os impactos, os custos ambientais e socioeconômicos dos
deslocamentos de pessoas e cargas nas cidades - contido no Art.7, item IV,
assim como, o acondicionamento destes transportes.
De acordo com Gil (1991) e Malhotra (2001), as metodologias
utilizadas nesse estudo foram: bibliográfica, efetivada mediante o levantamento
14
de dados cujas fontes foram artigos, livros, revistas especializadas e materiais
disponíveis na internet para dar sustentação ao tema escolhido. Em relação à
abordagem do problema, do ponto de vista dos procedimentos técnicos é
qualitativa, pois fez a interpretação dos fenômenos e a atribuição de
significados a partir dos resultados encontrados na análise mercadológica.
Quanto aos objetivos propostos, exploratória por observar uma realidade, já
existente em relação a informações específicas obtidas por questionário. É
considerada dedutiva, de acordo com o pensamento.

15
2 FERRAMENTAS UTILIZADAS PARA AVALIAR AS NECESSIDADES DOS
CLIENTES
2.1 BENCHMARKING DO PRODUTO
Benchmarking é um processo contínuo de comparação dos produtos,
serviços e práticas empresariais entre os mais fortes concorrentes ou marcas1
reconhecidas como líderes. É um método de pesquisa que permite realizar
comparações de processos e práticas ‘companhia-a-companhia’ para identificar
o melhor do melhor e alcançar um nível de superioridade ou vantagem
competitiva. Os japoneses utilizam o termo ‘dantotsu’ que significa lutar para
tornar-se o ‘melhor do melhor’, com base num processo de alto aprimoramento
que consiste em procurar, encontrar e superar os pontos fortes dos outros
concorrentes (SPENDOLINE,1993). Esse conceito enraizou-se numa nova
abordagem de planejamento estratégico. Durante a última década, ele tem
produzido resultados impressionantes em companhias como a Xerox, a Ford e
a IBM.
Para Leibfried e Kthleen (1994), o ponto de partida para a exelência é o
cliente. Tanto interno ou externo à organização, o cliente fixa as expectativas
de desempenho, e é o derradeiro juiz da qualidade.
Spendoline (1993) defende que, benchmarking competitivo envolve a
identificação de produtos, serviços e processos de trabalho dos concorrentes
diretos de sua organização. O objetivo é identificar informações específicas
sobre os produtos, processos e resultados de negócios de seus concorrentes,
para depois comparar com aquelas mesmas informações de sua organização.
Desta forma, foram avaliadas, e comparadas, diferentes marcas de
modo a identificar suas principais característicase benefícios similares que
garantiram e asseguraram a escolha das soluções aplicadasna elaboração do
projeto técnico-econômico do empreendimento,ao que se segue:
1É uma marca que atesta a qualidade dos produtos que comercializa e garante a excelência no atendimento e serviços que presta. A marca deverá sugerir e ressaltar os atributos, valores e, sobretudo, os benefícios - que é o que de fato o cliente compra -, além de projetar uma personalidade atraente para a marca (DUTRA, 2014).
16
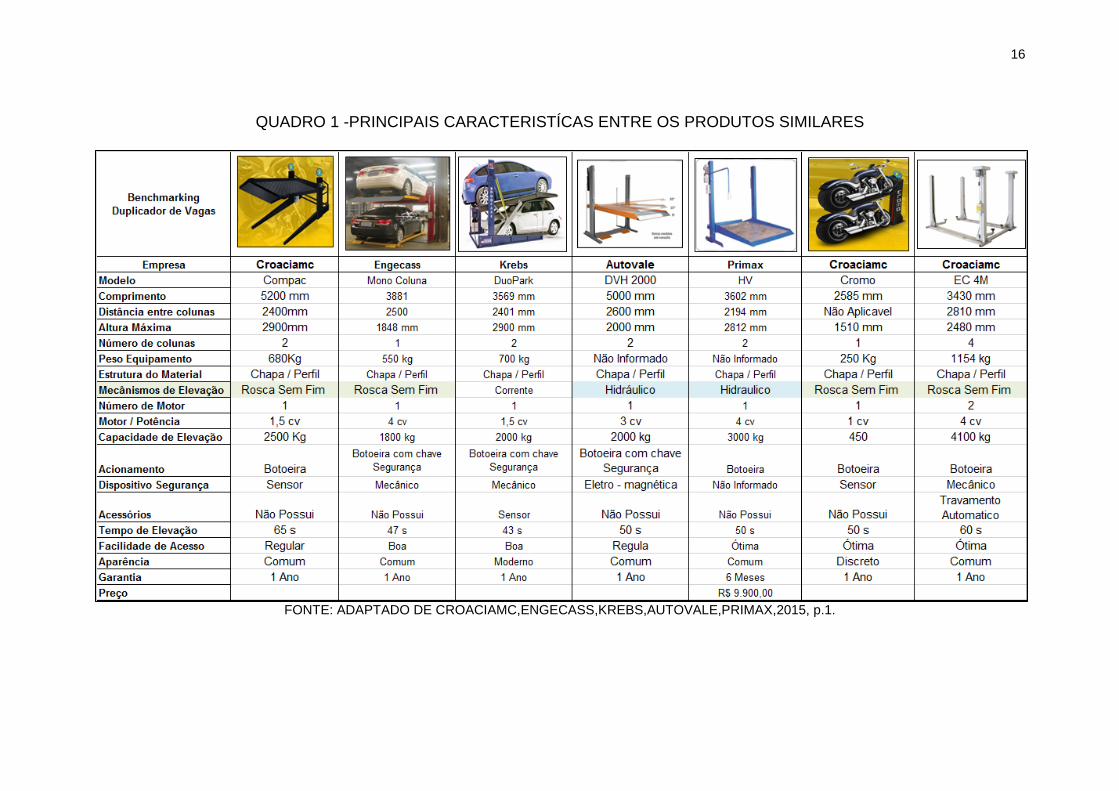
QUADRO 1 -PRINCIPAIS CARACTERISTÍCAS ENTRE OS PRODUTOS SIMILARES
FONTE: ADAPTADO DE CROACIAMC,ENGECASS,KREBS,AUTOVALE,PRIMAX,2015, p.1.

17
A análise do Quadro 1,identificou quea maioria dos produtos utiliza como
mecanismo de elevação o dispositivo de rosca sem fim, por meio de acionamento
elétrico, visto a praticidade na aplicação de energia elétrica e o baixo custo dos
materiais.Comparado aos produtos que utilizam dispositivos hidráulicos, seu custo
de venda se torna mais baixo e prático-devido à utilização dos espaços disponíveis -
os quais, na maioria das outras aplicações, se tornam inviáveis.
2.2 PESQUISA DE MERCADO
A pesquisa mercadológica pode ser realizada a qualquer tempo do processo
e não se restringe à análise de apenas um tipo de problema mercadológico, mas a
todos os fatos relacionados a eles, pois identificam oportunidades de melhorias.
Assim como, servem para analisar o perfil de clientes em relação às suas
necessidades (BODY; WESTFALL, 1979).
2.2.1 Coleta de dados
A amostra foi constituída de proprietários de carros e/ou motos, em
Curitiba,emlugares distintos, no período de20 a 29 de fevereiro de 2016.
De um total de 72 questionários foram extraídos 40 de acordo com os
critérios preestabelecidos:
a) fatores de inclusão:
- Proprietários de garagens que possuam carro e moto;
- Que tenham carro, mas interesse em adquirir moto;
- Que tenham interesse em adquirir o dispositivo.
b) fatores de exclusão:
- Aqueles que não correspondam aos fatores de inclusão.
Os participantes foram esclarecidos sobre o tema da pesquisa. A partir das
respostas, foram delimitadas as reais necessidades e expectativas. As informações
qualitativas coletadas receberam o tratamento de dados necessários para a sua
divulgação, expressas em números - pesquisa quantitativa. Após a sua análise
foram consideradas algumas questões em relação ao projeto de instalação do
dispositivo duplicador de vaga.
18
2.2.2 Organização e registro de dados
Os dados foram tabulados no Microsoft Excel 2010, e tratados em relação as
porcentagens. A sua análise buscou uma associação entre os resultados e a
tomadas de soluções.
2.2.3 Resultados
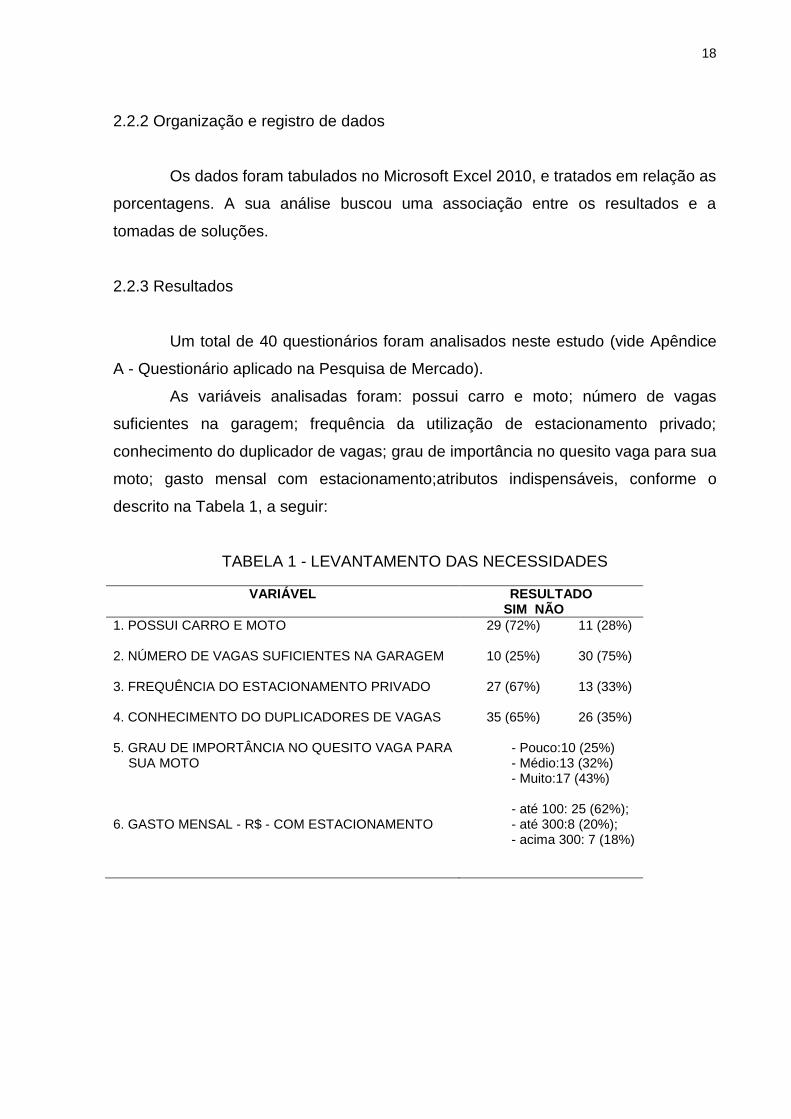
Um total de 40 questionários foram analisados neste estudo (vide Apêndice
A - Questionário aplicado na Pesquisa de Mercado).
As variáveis analisadas foram: possui carro e moto; número de vagas
suficientes na garagem; frequência da utilização de estacionamento privado;
conhecimento do duplicador de vagas; grau de importância no quesito vaga para sua
moto; gasto mensal com estacionamento;atributos indispensáveis, conforme o
descrito na Tabela 1, a seguir:
TABELA 1 - LEVANTAMENTO DAS NECESSIDADES
VARIÁVEL RESULTADO SIM NÃO
1. POSSUI CARRO E MOTO 29 (72%) 11 (28%)
2. NÚMERO DE VAGAS SUFICIENTES NA GARAGEM 10 (25%) 30 (75%) 3. FREQUÊNCIA DO ESTACIONAMENTO PRIVADO
27 (67%)
13 (33%)
4. CONHECIMENTO DO DUPLICADORES DE VAGAS
35 (65%)
26 (35%)
5. GRAU DE IMPORTÂNCIA NO QUESITO VAGA PARA
SUA MOTO
- Pouco:10 (25%) - Médio:13 (32%) - Muito:17 (43%)
6. GASTO MENSAL - R$ - COM ESTACIONAMENTO
- até 100: 25 (62%); - até 300:8 (20%); - acima 300: 7 (18%)

19
TABELA 1- LEVANTAMENTO DAS NECESSIDADES 7 CLASSIFICAÇÃO DOS ATRIBUTOS INDISPENSÁVEIS
__
FONTE: OS PRÓPRIOS AUTORES, 2015.
Após terem sido verificados os números das variáveis, pôde-se estabelecer
as seguintes questões (vide Apêndice B - Gráficos utilizados para quantificar as
necessidades):
Embora o presente estudo tenha interpretado os resultados do grupo que
tem carro e moto 72% (29 pessoas), e de outro que possui somente carro11
pessoas (28%),de acordo com os fatores de inclusão, não priorizou estas diferenças
para traçar um paralelo entre os mesmos, mas sim o interesse na compra do
dispositivo. O segundo grupo dos 11% - tem interesse na aquisição de moto e,
portanto, de adquirir o dispositivo.
Quanto ao número de vagas suficientes, o maior índice está relacionado ao
grupo que NÃO tem, com 75% (30 pessoas),para 25% (10 pessoas) que têm. Ou
seja, esses dados relacionados aos 67% que têm a necessidade do uso de
estacionamento privado, para aquele outro grupo de 33% (13 pessoas) que não
precisam. Esses últimos, porém, refletem o resultado daqueles que já possuem, de
algum modo, onde guardar as suas motos, mas também pretendem adquirir o
dispositivo.
Os gastos aproximados, variam do maior valor acima de 300 reais: 18% (7
pessoas), e o menor valor prevalente de 100 reais, 62% (25 pessoas) e, o restante,
valores até 300 reais: 20% (8 pessoas).O levantamento destes gastos com o
38
8
20
36
19
8 8
33
19
35
23
4
ATRIBUTOS INDISPENSÁVEIS
20
estacionamento foi necessário, para que seja possível o desenvolvimento do
PAYBACK- é o tempo de retorno do investimento inicial até o momento no qual o
ganho acumulado se iguala ao valor deste investimento -do duplicador de vagas de
garagens para motos. Relação custo-benefício.
Já no quesito conhecimento do duplicador de vaga foi observado que, 65%
(26 pessoas) conhecem, e 35% (14 pessoas) não conhecem o dispositivo. Isto é,
este último índice pode estar correlacionado aos 25% (10 pessoas) que atribuem
pouca importância ao produto. Porém, aquele primeiro grupo de 65% (26 pessoas)
atribui como muito importante. Os outros 32% (13 pessoas) conferem o grau de
importância média para o dispositivo.
O resultado do entrelaçamento entre o desconhecimento do produto 35%
(14pessoas), e o grau de pouca importância 25% (10 pessoas), não foi o suficiente
para mudar ou invalidar qualquer tomada de decisão quanto a colocação do
dispositivo por parte dos entrevistados.
A partir dos resultados encontrados na pergunta 7, Atributos Indispensáveis,
observou-se que as necessidades relatadas são fatores decisivos para diagnósticos
e para o direcionamento de atitudes que vislumbrem uma qualidade funcional
adequada, na qual a segurança 95%(38 pessoas); 90% pessoas - facilidade de
operação e custo na aquisição; e a durabilidade 87%dos entrevistados, são
fundamentais.
A análise dos resultados permitiu codificar as reais necessidades dos
clientes e, também, de implementar o projeto do duplicador de vagas de garagens
para motos para otimizar espaços e eliminar os custos com o estacionamento
privativo.
2.3 CASA DA QUALIDADE
O termoQualityFunction Deployment - Desenvolvimento da Função
Qualidade(QDF), surgiu na década de 70, no Japão, na indústria automotiva. Nos
anos 80 passou a ser uma ferramenta comum nos Estados Unidos da América
(EUA), e chegou ao Brasil por volta de 1990, cujo objetivo era traduzir as
necessidades dos clientes para uma linguagem técnica, a qualfacilitava a sua
produção na indústria (PINTO;FONTENELLE, 2013).
21
De acordo com Cheng (1995) o QFD é denominado pela ação gerencial do
planejamento da qualidade. O QFD busca desenvolver, com afinco, o termo
qualidade, pois utiliza a lógica da causa e efeito, de forma sistematizada. Avalia as
necessidades latentes de um cliente e as traduzem de maneira passível a ser
produzida dentro de uma empresa ou organização. Tem por objetivo alcançar a
plena satisfação de seus clientes, assegurada pela excelência no atendimento
prestado, de forma a garantir a qualidade dos produtos e nos serviços ofertados.
2.3.1 Estrutura
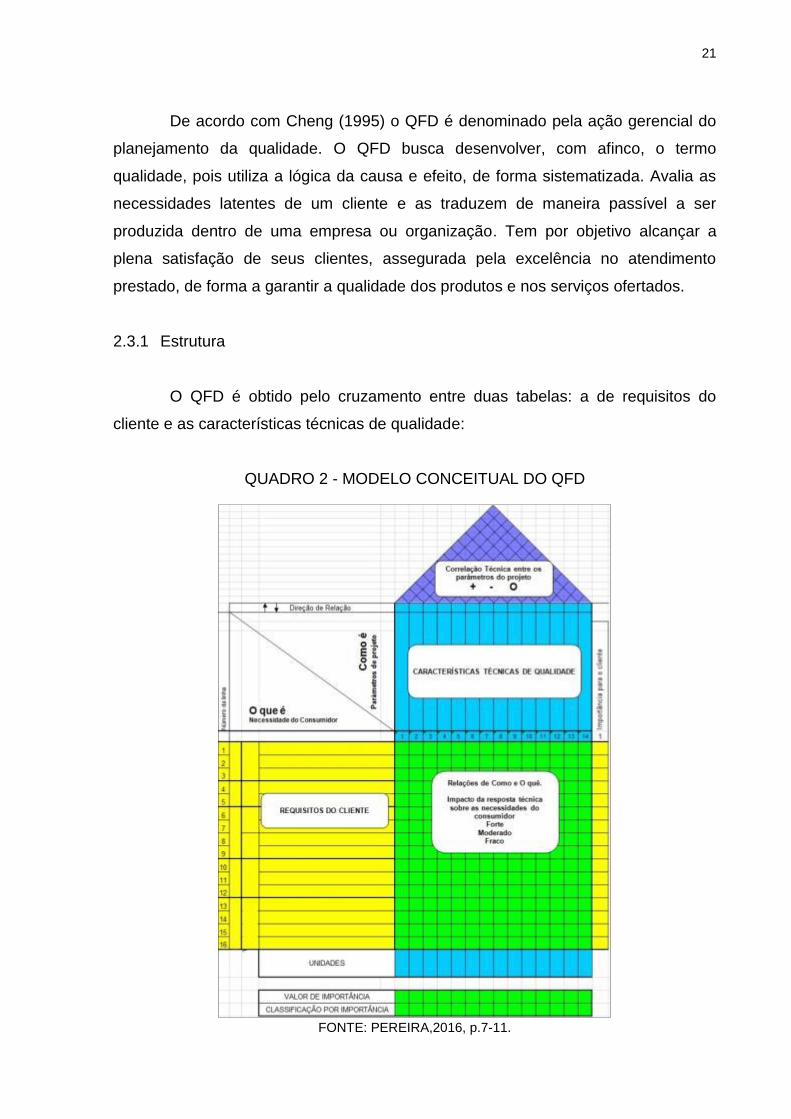
O QFD é obtido pelo cruzamento entre duas tabelas: a de requisitos do
cliente e as características técnicas de qualidade:
QUADRO 2 - MODELO CONCEITUAL DO QFD
FONTE: PEREIRA,2016, p.7-11.
22
Os requisitos são as expressões dos clientes convertidas de maneira
qualitativa em necessidades reais. As características técnicas de qualidade, são
entendidas como os meios técnicos necessários para a idealização de um projeto,
que portam unidades de medidas para que, ao final de sua concepção, possam ser
quantificados (PEREIRA, 2015).
Por exemplo, com base na pergunta 7 (Tabela 1- Levantamento das
Necessidades) em qual 38 pessoas (95% dos entrevistados) consideraram
indispensável o aspecto da segurança, portanto, o maior valor agregado - em
relação aos demais - ao QF. Esse resultado é descrito, em percentual, na coluna de
importância para o cliente.
O valor de importância é obtido mediante o somatório das multiplicações
entre a importância para o cliente e a relação de vínculo entre Como e O quê.
A classificação por importância é obtida de maneira numérica sequencial
crescente, de acordo com os resultados do valor de importância.
O telhado da Casa da Qualidade corresponde ao inter-relacionamento de
todas as características técnicas de qualidade, e identificaseus graus de
dependência. Esse cruzamento permite a clara visualização de como a alteração de
uma característica do produto influencia as demais. Esta relação, pode ser positiva
ou negativa.
Na afirmação de Pereira (2015, p. 5apud AKAO,1990) a utilização da QFD
para o desenvolvimento de um novo produto tem duas funções:
a) direcionar o processo de desenvolvimento do novo produto, de modo que
este se aproxime, cada vez mais, das necessidades dos consumidores;
b) filtrar o desenvolvimento, de modo a permitir o prosseguimento restrito
das alternativas que se aproximam da meta estabelecida, descartando as
demais.
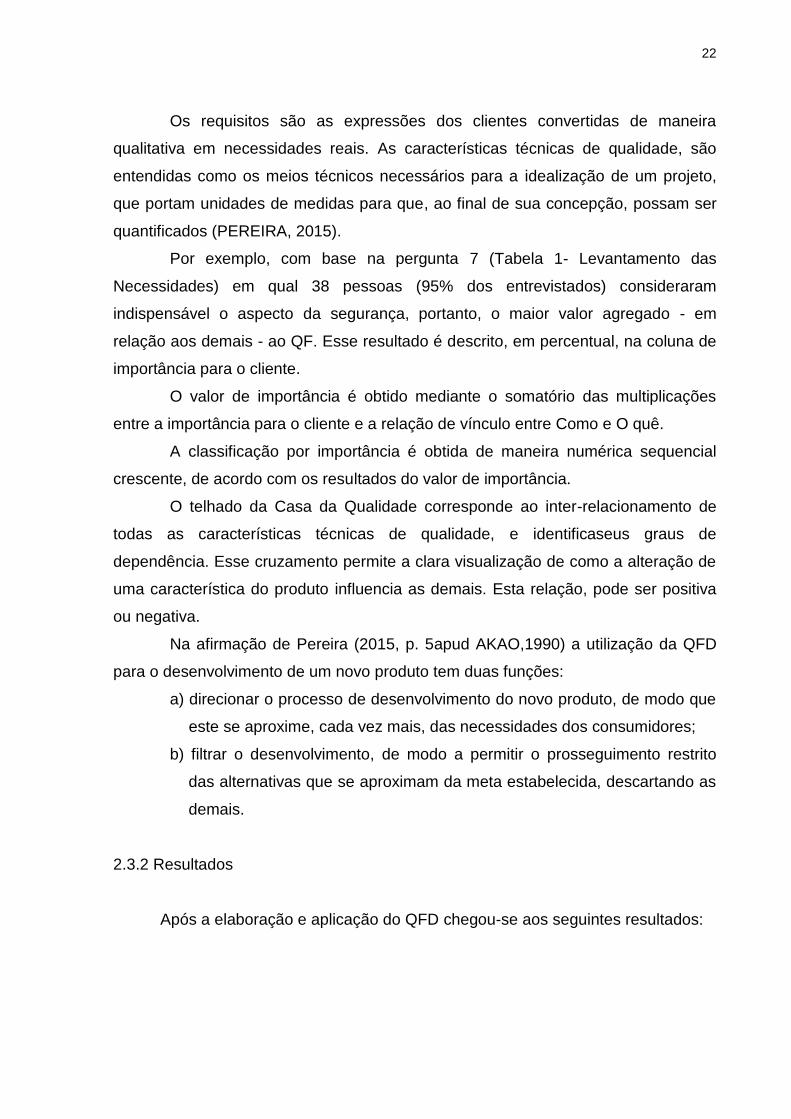
2.3.2 Resultados
Após a elaboração e aplicação do QFD chegou-se aos seguintes resultados:
23
QUADRO 3 - RESULTADO QFD
FONTE: OS PRÓPRIOS AUTORES, 2015.
a) ponderar o custo total do projeto de maneira que se mantenha acessível;
b) seguir as Normas Regulamentadoras de Segurança (NR’s), para garantir
o perfeito funcionamento do produto, assim como, oevidenciado no QFD
realizado.

24
2. 4 MATRIZ DE DECISÃO
A Matriz de Decisão é uma ferramenta de apoio a tomadas de decisões, que
permite a análise rápida de todos os aspectos relevantes, assim como, uma visão
ampla e coerente das alternativas abordadas, com mais cientificidade e método
(GHOUBAR, 2015).
Esta tabela é constituída por:
a) uma coluna de necessidades do cliente, a qual é fornecida pelo QFD;
b) colunas de opções: em quais são descriminadas as diferentes
possibilidades de realização do projeto, juntamente com suas
características de relação com as necessidades do cliente, descritas nas
soluções propostas; e
c) uma coluna em qual é descriminada o percentual de importância para o
cliente (a partir do resultado da pesquisa mercadológica). Estes valores
de importância foram determinados a partir do somatório das
multiplicações entre: (as características de relação de cada produto) X (as
necessidades do cliente) = o percentual de importância para o cliente.
QUADRO4- ESCOLHA DO SISTEMA
FONTE: OS PRÓPRIOS AUTORES, 2015.
25
A aplicação da Matriz de Decisão permitiu, clara e sucintamente, a
visibilidade da melhor escolha do sistema a ser utilizado na elaboração do protótipo.
É importante ressaltar que, a identificação do grau de importância de cada item,
descrito no Quadro 4, está diretamente relacionada com os resultados obtidos pela
pesquisa de mercado.
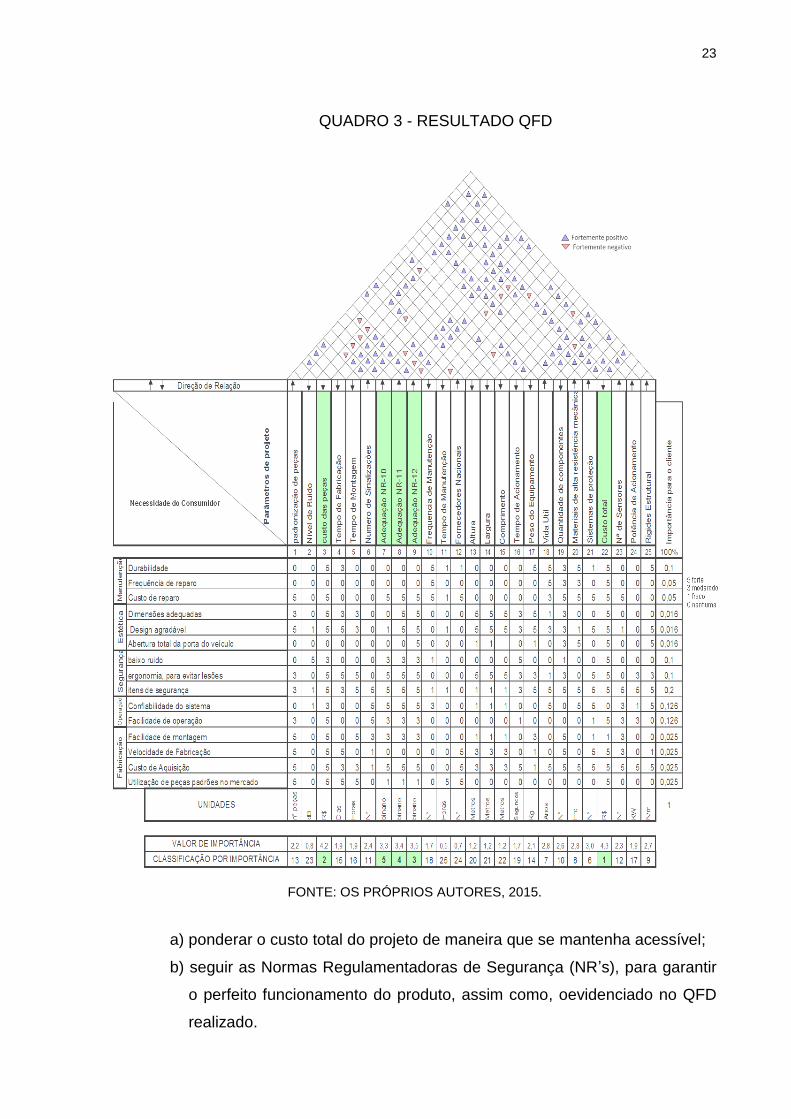
As características dos sistemas analisados consistem em:
QUADRO 5 - SISTEMA HIDRÁULICO
DESCRIÇÃO HIDRÁULICO Fatores decisivos para
o propósito do protótipo
Componentes - Cilindros hidráulicos, bombas de óleo, fluido,
reservatório entre outros componentes de aplicação distintas e de auto custo
------------
Limite de carga admissível
- Proporcional aos demais analisados Fator decisivo para NÂO
escolher do sistema
Ruídos - Grau elevado Restrito para os entrevistados
Espaço disponível
- Pouco espaço disponível para a aplicação de qualquer um dos sistemas
Valor para manutenção
- Alto valor Fator relevante para a
NÃO escolher
Custos de instalação
- 30% a mais que os outros Fator relevante para a
NÃO escolher
FONTE: OS PRÓPRIOS AUTORES, 2015.
QUADRO 6 - SISTEMA MOVIDO POR CORRENTE
DESCRIÇÃO ELÉTRICO MOVIDO POR
CORRENTE Fatores decisivos para o
propósito do projeto
Limite de cargas admissível
- Compatível com cargas menores e em dispositivos para elevação de cargas menores de baixo valor
------------
Aplicação no mercado
- Baixa aplicação, e pouco utilizada pelos fabricantes de
equipamentos similares; - Efetivospara elevação de veículos do tipo automóveis com carga aproximada de
1.200 Kg; - Para elevação de veículos
menores do tipo motocicletas pode ser uma opção, porem
como citado, sem um fator de segurança confiável
------------
Fator confiança e segurança ------------ - Baixa confiança e
segurança
Ruído - As correntes geram uma emissão sonora excessiva
-fator relevante para NÃO escolher
FONTE: OS PRÓPRIOS AUTORES, 2015.
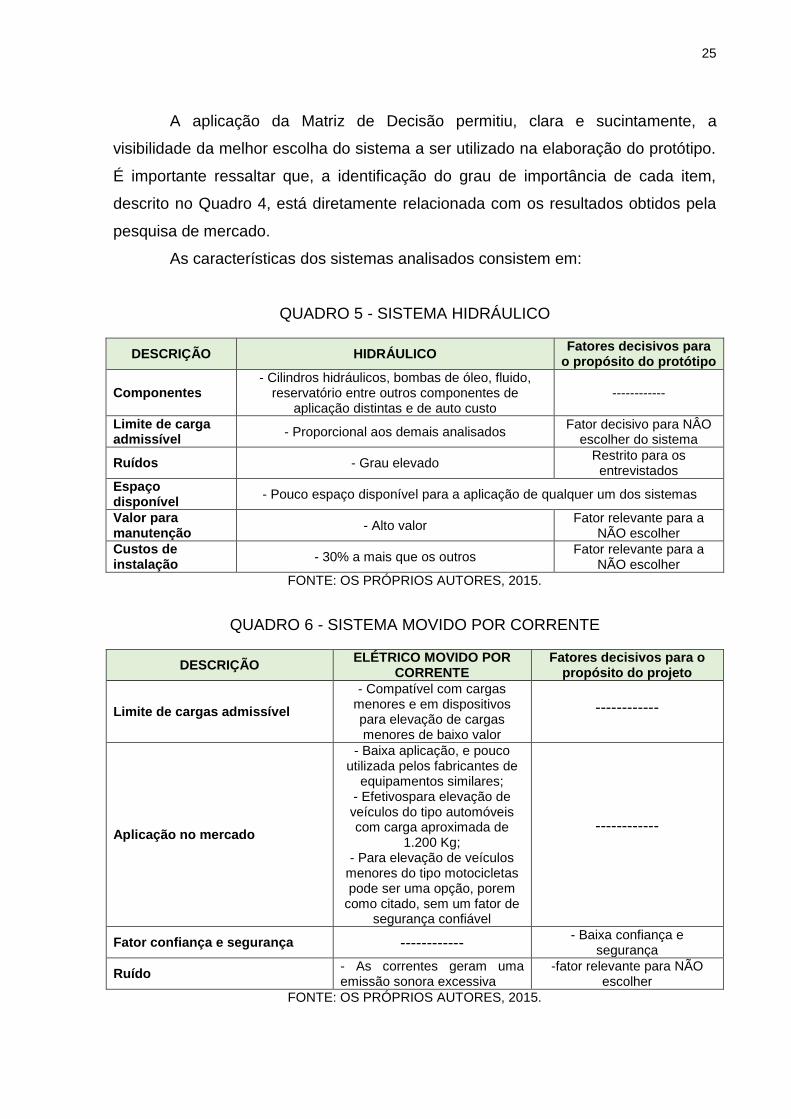
26
QUADRO 7 - SISTEMA ELEVAÇÃO POR CORRENTE
DESCRIÇÃO ELEVAÇÃO POR
CORRENTE Fatores decisivos para o
propósito do projeto
Fator confiança e segurança - Não foi apresentado um equipamento se quer com dispositivo de segurança
- Envolvem riscos de segurança a vida dos
usuários e ao patrimônio de seus proprietários
FONTE:OS PRÓPRIOS AUTORES, 2015.
Com base nos dispositivos apresentados no Benchmarking, nas informações
extraídas da Pesquisa de Mercado e da Casa da Qualidade foi possível determinar
os principais tipos de equipamentos similares utilizados pelo mercado às
características principais mencionadas pelos consumidores. Levando-se em conta
todas as características apresentadas, foram descartadas as possibilidades do uso
destes sistemas.
Face a isto, a opção que melhor atendeu às necessidades evidenciadas
pelos clientes na pesquisa de mercado, é o sistema elétrico com acionamento por
fuso de rosca quadrada, apresentado como solução proposta.
27
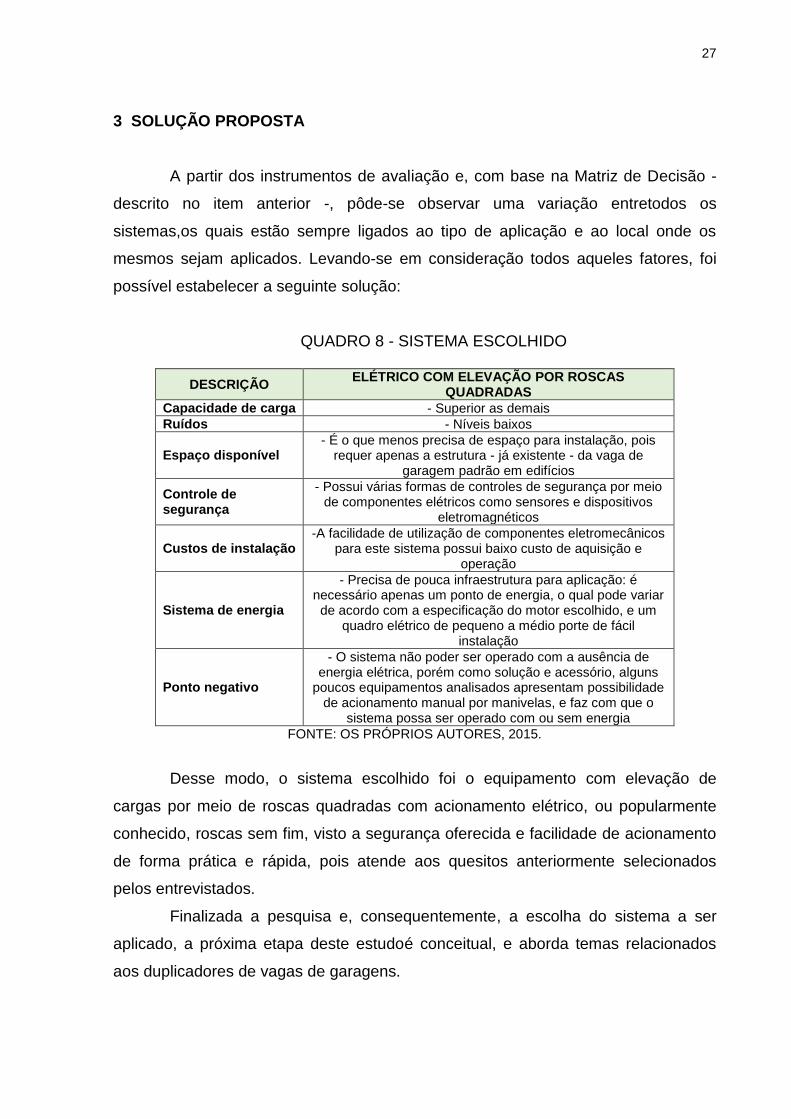
3 SOLUÇÃO PROPOSTA
A partir dos instrumentos de avaliação e, com base na Matriz de Decisão -
descrito no item anterior -, pôde-se observar uma variação entretodos os
sistemas,os quais estão sempre ligados ao tipo de aplicação e ao local onde os
mesmos sejam aplicados. Levando-se em consideração todos aqueles fatores, foi
possível estabelecer a seguinte solução:
QUADRO 8 - SISTEMA ESCOLHIDO
DESCRIÇÃO ELÉTRICO COM ELEVAÇÃO POR ROSCAS
QUADRADAS Capacidade de carga - Superior as demais Ruídos - Níveis baixos
Espaço disponível - É o que menos precisa de espaço para instalação, pois
requer apenas a estrutura - já existente - da vaga de garagem padrão em edifícios
Controle de segurança
- Possui várias formas de controles de segurança por meio de componentes elétricos como sensores e dispositivos
eletromagnéticos
Custos de instalação -A facilidade de utilização de componentes eletromecânicos
para este sistema possui baixo custo de aquisição e operação
Sistema de energia
- Precisa de pouca infraestrutura para aplicação: é necessário apenas um ponto de energia, o qual pode variar de acordo com a especificação do motor escolhido, e um
quadro elétrico de pequeno a médio porte de fácil instalação
Ponto negativo
- O sistema não poder ser operado com a ausência de energia elétrica, porém como solução e acessório, alguns
poucos equipamentos analisados apresentam possibilidade de acionamento manual por manivelas, e faz com que o
sistema possa ser operado com ou sem energia
FONTE: OS PRÓPRIOS AUTORES, 2015.
Desse modo, o sistema escolhido foi o equipamento com elevação de
cargas por meio de roscas quadradas com acionamento elétrico, ou popularmente
conhecido, roscas sem fim, visto a segurança oferecida e facilidade de acionamento
de forma prática e rápida, pois atende aos quesitos anteriormente selecionados
pelos entrevistados.
Finalizada a pesquisa e, consequentemente, a escolha do sistema a ser
aplicado, a próxima etapa deste estudoé conceitual, e aborda temas relacionados
aos duplicadores de vagas de garagens.
28
4 MODO DE FALHA E ANÁLISE DOS EFEITOS
Modo de Falha e Análise dos Efeitos - FailureModeandEffectAnalysis-
(FMEA) é uma ferramenta qualitativa que engloba análises de projeto e processo, o
que possibilita a confiabilidade do produto final (TAHARA, 2015).
Basicamente, é elaborada uma planilha, para identificar as falhas que podem
ocorrer nas peças, processo e subconjuntos do produto, e as soluções propostas
para sanar a possibilidade de que essa falha realmente ocorra - vide Apêndice C-
Planilha do FMEA Design (TAHARA, 2015).
As planilhas de FMEA podem ser divididas em várias etapas do processo de
execução de um produto:
a) FMEA Design: abrange falhas que podem ocorrer na fase de projeto;
b) FMEA System:além de analisar as falhas na fase de projeto, tem a
particularidade de analisar o subconjunto, ou seja, falhas que ocorrem nas
funções de um determinado sistema;
c) FMEA Process: este determina falhas no processo de execução do
produto, como por exemplo, na linha de montagem do mesmo (TAHARA,
2015).
Para efeito deste estudo, utilizou-se o FMEA Design, já que o mesmo foi
executado até a fase de elaboração do protótipo, o qual possui subconjuntos de
peças bem simplificadas. Não houve a necessidade de utilizar o FMEA System como
ferramenta de análise.
Por meio do FMEA Design pôde-se verificar que algumas falhas obtiveram
pontuações mais altas (acima de 100). Com base nessas pontuações foram
tomadas ações de projeto para evitar que tais falhas ocorressem:
a) na estrutura metálica foram anotadas as pontuações que evidenciaram
melhor acabamento em cantos vivos e superfícies ásperas com
acabamento de pinturas;
b) no carro guia responsável pelo torque de elevação, foram visualizadas
possíveis falhas como vibrações e barulhos excessivos, o que gerou a
análise detalhada do dimensionamento destes componentes;
c) na plataforma foi detectada a necessidade de melhor acabamento dos
cantos vivos para amenizar problemas com acidentes;

29
d) no motor elétrico foram encontrados problemas com dimensionamento da
fiação elétrica e o superaquecimento do motor. Desta forma, foi
recomendado que, o cabeamento e o dimensionamento do motor elétrico,
sejam especificados com maior atenção.

30
5 BASES CONCEITUAIS RELACIONADAS AO DUPLICADOR DE VAGAS
PARA MOTO
O entendimento de alguns conceitos, e suas análises, foram necessários
para o desenvolvimento e execução do projeto,e para a elaboração do protótipo do
duplicador de vagas para motos. Desta forma, além do conceito de duplicador de
vagas, determinadas considerações em relação aos comportamentos estruturais
como atuação de forças cisalhantes, momento de inercia, momento fletor e
flambagem, foram descritos, pois eles garantem a robustez e estabilidade e
confiabilidade do sistema. Como, também, os conceitos básicos sobre motores
elétricos e componentes de acionamentos para facilitar a compreensão do
funcionamento de elevação da plataforma de sustentação do motor por meio dos
motores elétricos e chaves fim de curso as quais comandaram as paradas do
sistema.
E, para finalizar, o embasamento teórico sobre roscas trapezoidais, suas
principais funções e equacionamentos para definição do fuso ideal para aplicação
em questão. Concomitante a eles, foram analisados os conceitos sobre redutores de
velocidade e acoplamentos de polias em V para compreensão do dispositivo de
transferência de forças do motor para o eixo motor.
5.1 DUPLICADOR DE VAGA
O Duplicador de vaga - ou elevador veicular - é um equipamento concebido
para sobrepor os veículos e, assim, duplicar ou triplicar a capacidade da mesma
área ocupada por um só carro, colocando um sobre o outro. O equipamento também
pode ser construído para motos (KTECS, 2016).
FIGURA 1- MODELO DE DUPLICADOR
FONTE: OS PRÓPRIOS AUTORES, 2016.
31
O protótipo do duplicador proposto consiste em uma viga I, para suportar os
esforços, cujo sistema de transmissão de força é composto por um motor elétrico e
uma rosca trapezoidal, e foi projetado para ser utilizado com uma moto de até 400
kg. As medidas do equipamento não ultrapassam os limites da vaga.
5.2 FORÇA CISALHANTE E MOMENTO FLETOR
Para o concebimento da viga ideal a ser aplicada no protótipo do projeto,
pré-determinou-se a força cisalhante máxima e o momento fletor máximo que
incidem sobre ela. Desse modo, primeiro foi elaborado um diagrama de corpo livre,
cujo resultado indicou todas as reações nos apoios dessa estrutura. Para a obtenção
das funções que regem o cisalhamento e o momento fletor, foi atribuído
coordenadas de posição "x", de forma que cada uma corresponda a uma região a
ser estudada na viga em análise. A viga foi seccionada perpendicularmente a seu
eixo, nas posições de estudo, pré-estabelecido por "x". A qual possibilitou a
avaliação das forças cisalhantes (V), e também (M) correspondente ao momento
fletor. Foi utiliza a equação1 fundamental de equilíbrio:
∑ 𝐹(𝑥) = 0, ∑ 𝐹(𝑦) = 0, ∑ 𝑀 = 0 (1)
Com isso, determinou-se o ‘V’ (esforços cortantes) em função de ‘x; y’ e ‘ M’
(momento fletor) em função de ‘x; y’.
5.2.1 Variação das tensões ao longo de uma viga
Segundo Hibbeler (1997), Beer e Russel(1992), em uma seção arbitraria ao
longo do eixo da viga, o cisalhamento (V) e o momento fletor (M) internos são
gerados por uma distribuição parabólica de tensões cisalhantes e uma distribuição
linear de tensões normais, onde as extremidades da seção estão sujeitas apenas
tensão normal máxima.

32
FIGURA 2 - DISTRIBUIÇÃO DAS TENSÕES DE FLEXÃO
FONTE: HIBBELER,1997, p 97.
Enquanto o centro da seção estiver sobre um eixo neutro estará sujeito a
tensão cisalhante.
FIGURA 3 - DISTRIBUIÇÃO DAS TENSÕES CISALHANTES
FONTE: HIBBELER,1997, p 102.
O dimensionamento da viga, para que seja ideal e segura, deve levar em
consideração que suas tensões de flexão e cisalhamento não excedam as tensões
admissíveis para o material.
Com base em Beer e Russel (1992) para determinar-se as tensões solicitadas
a viga de secção prismática submetida à ação de carregamento transversal
apresenta tensões normal e de cisalhamento em qualquer secção transversal. Em
um regime elástico, a tensão normal 𝜎𝑥 varia linearmente com a distância y do eixo
neutro. Dependendo, também, de seu momento fletor e do momento de inércia da
linha neutra, conforme a equação 2, na qual:
𝜎𝑚á𝑥 =|𝑀|𝑚á𝑥.𝑌𝑚á𝑥̅̅ ̅̅ ̅̅ ̅
𝐼𝑙𝑛(2)
33
Leia-se:
𝜎𝑚á𝑥 - Tensão máxima aplicada a estrutura;
|𝑀|𝑚á𝑥 -Momento Fletor Máximo;
𝑌𝑚á𝑥̅̅ ̅̅ ̅̅ - Posição da Linha neutra;
𝐼𝑙𝑛 – Momento de inércia da linha neutra.
Ao considerar- se a determinação do momento de inércia, equação 3:
𝐼𝑙𝑛 = ∑ (𝑏.ℎ3
12+ 𝐴. (𝑦𝑐𝑔 + �̅�))(3)
Em que:
b -base da secção analisada;
h - altura da secção analisada;
A - área da secção analisada;
𝑦𝑐𝑔- posição do centro de gravidade;
�̅� – posição da linha neutra.
Com o objetivo de se determinar a tensão de cisalhamento foi utilizada a
análise das reações de apoio, para a obtenção da distribuição das tensões
cisalhantes, que atuam sobre a área da seção transversal do corpo de estudo:
Para a definir o cisalhamento interno, foi selecionadoo elemento
perpendicular a seu eixo, no ponto onde buscou-se a tensão cisalhante. Foi
elaboradoo diagrama de corpo livre das seções avaliadas e, com o uso das
equações de equilíbrio determinou-se a força cisalhante interna ‘V’. Como também,
identificada a localização do eixo neutro, que passa pelo centroide da área da seção
transversal. Na sequência, definiu-se o momento de inércia I de toda a área relativa
ao eixo neutro. Fez-se uma seção imaginária que passa pelo ponto onde buscou-se
a tensão cisalhante dividindo a seção transversal em duas partes. Foi avaliado e
medido a largura "t" da área no local analisado e, devido a necessidade, determinou-
se a seguinte equação 4:
𝑄 = 𝐴. 𝑦(4)
Em qual:
Q -Momento estático da área localizada a cima ou abaixo da linha neutra;
A -Área de secção estudada;
Y - Posição da linha neutra.

34
Por consequência, os valores encontrados foram aplicados, na formulação
das tensões cisalhantes para possibilitar a definição da tensão máxima de
cisalhamento que a estrutura deverá suportar, equação 5:
𝜏 =|𝑉|𝑚á𝑥𝑄
𝐼(5)
Em que:
𝜏 – Tensão de cisalhamento
V – Tensão cisalhante máxima
I – Momento de inercia
5.3 MANCAIS
Na compreensão de Andrade Junior (1994), mancal é um dispositivo fixo
fechado, sobre o qual é apoiado um eixo. Sua função é comportar um eixo, e
existem duas formas principais empregadas para esse propósito: o mancal de
deslizamento, na qual há uma bucha de material macio entre a base do mancal e o
eixo, que se trata de uma solução para baixas rotações; e o mancal de rolamento,
adequado para maiores rotações.
Os mancais de deslizamento servem de apoio para eixos girantes, e estão
sujeitos a força de atrito devido a rotação do eixo, ou seja, o do eixo com o mancal.
São utilizados em máquinas pesadas e em equipamentos de baixa rotação.
A vida útil dos mancais de deslizamento pode ser prolongada ao se
seguirem alguns paramentos:
a) os materiais necessitam ser muito bem escolhidos e apropriados a partir
do desenvolvimento do projeto de fabricação;
b) o projeto deverá prever os modos para os trabalhos de manutenção,
conservação, limpeza, lubrificação, alinhamento e reposição.
Mas, no caso de possíveis danos, é importante que seja considerada as
principais funções dos mancais de deslizamento que são, apoiar e guiar os eixos.
No caso do duplicador de vagas, foi aplicado quatro rolamentos de deslizamento que
têm a função de nortear o carro guia que suporta a base de elevação apoiada a viga
I. Estes rolamentos suavizam a força necessária para elevação da carga da moto e
35
da base que gera uma força de 16kN que, por sua vez, são aplicadas a cada
conjunto de rolamento gerados pelo momento que a base gera, e suportam, uma
carga máxima de 400 kg mais 200 kg da base metálica, sendo utilizado como dado
de entrada nos cálculos uma massa - de motos - de até 600 kg.
FIGURA 4 -APOIO DO ROLAMENTO VIGA W130 x13,5
FONTE:OS PRÓPRIOS AUTORES, 2016.
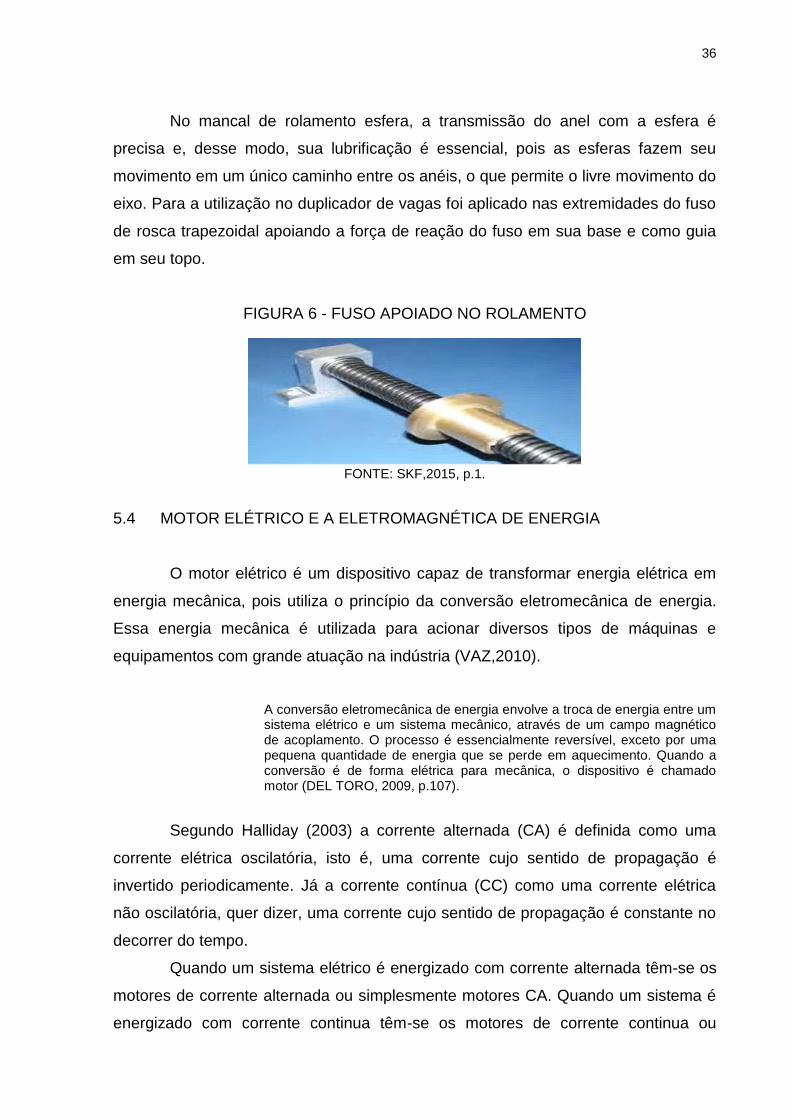
O mancal de rolamento é utilizado quando é necessário maior velocidade e
menor atrito.
Quando o eixo gira dentro do furo é produzido o atrito denominado de
escorregamento. Para reduzir esse atrito utiliza – se o mancal de rolamento:é um
elemento de máquina que permite o movimento relativo controlado entre duas ou
mais partes. Eles limitam as perdas de energia produzidas pelo atrito.
O mancal de rolamento é constituído de dois anéis concêntricos e, entre
esses anéis, são colocados elementos rolantes como as esferas.
FIGURA 5 - ROLAMENTO DE ESFERA DE CONTATO ANGULAR
FONTE: SKF, 2015, p.1.
36
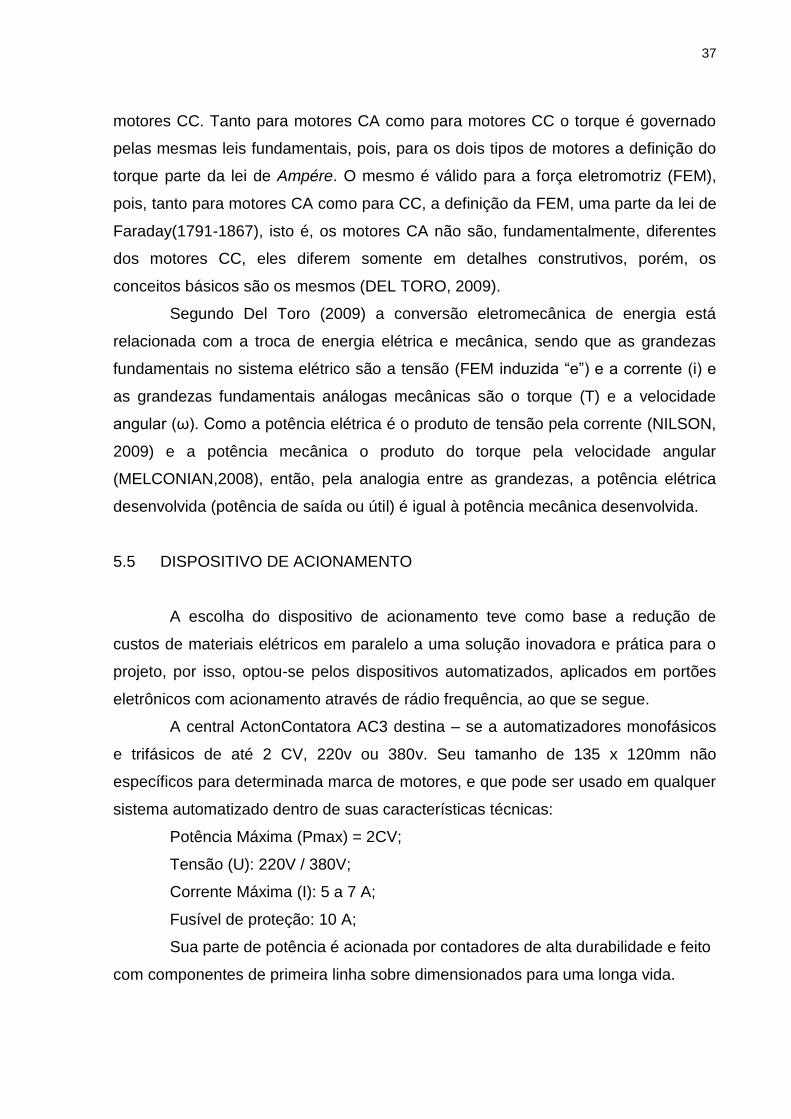
No mancal de rolamento esfera, a transmissão do anel com a esfera é
precisa e, desse modo, sua lubrificação é essencial, pois as esferas fazem seu
movimento em um único caminho entre os anéis, o que permite o livre movimento do
eixo. Para a utilização no duplicador de vagas foi aplicado nas extremidades do fuso
de rosca trapezoidal apoiando a força de reação do fuso em sua base e como guia
em seu topo.
FIGURA 6 - FUSO APOIADO NO ROLAMENTO
FONTE: SKF,2015, p.1.
5.4 MOTOR ELÉTRICO E A ELETROMAGNÉTICA DE ENERGIA
O motor elétrico é um dispositivo capaz de transformar energia elétrica em
energia mecânica, pois utiliza o princípio da conversão eletromecânica de energia.
Essa energia mecânica é utilizada para acionar diversos tipos de máquinas e
equipamentos com grande atuação na indústria (VAZ,2010).
A conversão eletromecânica de energia envolve a troca de energia entre um sistema elétrico e um sistema mecânico, através de um campo magnético de acoplamento. O processo é essencialmente reversível, exceto por uma pequena quantidade de energia que se perde em aquecimento. Quando a conversão é de forma elétrica para mecânica, o dispositivo é chamado motor (DEL TORO, 2009, p.107).
Segundo Halliday (2003) a corrente alternada (CA) é definida como uma
corrente elétrica oscilatória, isto é, uma corrente cujo sentido de propagação é
invertido periodicamente. Já a corrente contínua (CC) como uma corrente elétrica
não oscilatória, quer dizer, uma corrente cujo sentido de propagação é constante no
decorrer do tempo.
Quando um sistema elétrico é energizado com corrente alternada têm-se os
motores de corrente alternada ou simplesmente motores CA. Quando um sistema é
energizado com corrente continua têm-se os motores de corrente continua ou
37
motores CC. Tanto para motores CA como para motores CC o torque é governado
pelas mesmas leis fundamentais, pois, para os dois tipos de motores a definição do
torque parte da lei de Ampére. O mesmo é válido para a força eletromotriz (FEM),
pois, tanto para motores CA como para CC, a definição da FEM, uma parte da lei de
Faraday(1791-1867), isto é, os motores CA não são, fundamentalmente, diferentes
dos motores CC, eles diferem somente em detalhes construtivos, porém, os
conceitos básicos são os mesmos (DEL TORO, 2009).
Segundo Del Toro (2009) a conversão eletromecânica de energia está
relacionada com a troca de energia elétrica e mecânica, sendo que as grandezas
fundamentais no sistema elétrico são a tensão (FEM induzida “e”) e a corrente (i) e
as grandezas fundamentais análogas mecânicas são o torque (T) e a velocidade
angular (ω). Como a potência elétrica é o produto de tensão pela corrente (NILSON,
2009) e a potência mecânica o produto do torque pela velocidade angular
(MELCONIAN,2008), então, pela analogia entre as grandezas, a potência elétrica
desenvolvida (potência de saída ou útil) é igual à potência mecânica desenvolvida.
5.5 DISPOSITIVO DE ACIONAMENTO
A escolha do dispositivo de acionamento teve como base a redução de
custos de materiais elétricos em paralelo a uma solução inovadora e prática para o
projeto, por isso, optou-se pelos dispositivos automatizados, aplicados em portões
eletrônicos com acionamento através de rádio frequência, ao que se segue.
A central ActonContatora AC3 destina – se a automatizadores monofásicos
e trifásicos de até 2 CV, 220v ou 380v. Seu tamanho de 135 x 120mm não
específicos para determinada marca de motores, e que pode ser usado em qualquer
sistema automatizado dentro de suas características técnicas:
Potência Máxima (Pmax) = 2CV;
Tensão (U): 220V / 380V;
Corrente Máxima (I): 5 a 7 A;
Fusível de proteção: 10 A;
Sua parte de potência é acionada por contadores de alta durabilidade e feito
com componentes de primeira linha sobre dimensionados para uma longa vida.
38
FIGURA 7 - PLACA AC3
FONTE: ACTON CONTADORA,2015, p.1.
Entre as vantagens da aplicação da central AC3 é que a mesma já possui
entradas para chaves fim de curso, componentes utilizados para limitar a elevação
máxima e o ponto mínimo de descida.
5.5.1 Chave Fim De Curso
Uma chave fim de curso é um dispositivo eletromecânico que consiste de um
atuador mecanicamente contatas ou neste caso conectada ao borne da placa AC3.
FIGURA 8 - CHAVE FIM DE CURSO
FONTE: METALTEX, 2015, p.1.
A chave fim de curso possuem as seguintes vantagem elétricas:
a) adequação para comutação de cargas de potência mais elevadas que
outras tecnologias sensoras (típicas 5 a 24 Vca ou 10A A 120 Vca versus
menos de 1 A para sensores de proximidade ou fotoelétricos);
39
b) imunidade à interferência de rádio frequência;
c) operação simples normalmente aberta e ou normalmente fechadas, no
caso especifico do duplicador será utilizado normalmente aberto e fechara
quando acionado.
5.6 FLAMBAGEM
A análise da estabilidade da estrutura, garante que a mesma não sofra o
fenômeno denominado flambagem, comum em peças onde a área de secção
transversal é pequena em relação ao seu comprimento a qual é obtida, de acordo
com Beer (1992), pela aplicação de uma carga axial "P"(carga de flambagem) a
estrutura de um dispositivo, de forma que seja excedido seu equilíbrio estável e
deforme a estrutura.
FIGURA 9 - SISTEMAS: INSTÁVEL E ESTÁVEL
FONTE: ARRIVABENE, 1994, p.84.
5.6.1 Dimensionamento
O dimensionamento da estrutura deve ser iniciado, por primeiro, pela coluna
central da estrutura e determinar seu comprimento "L", e aplicada a uma carga de
flambagem "P". Deve-se levar em consideração que valor da tensão gerada pela
carga de flambagem P, pela área da seção transversal da viga, deve, por segurança,
ser menor que a tensão admissível do material.
40
Logo,tem -se a equação 6: 𝜎 = 𝑃
𝐴 ≤ 𝜎𝑎𝑑𝑚(6)
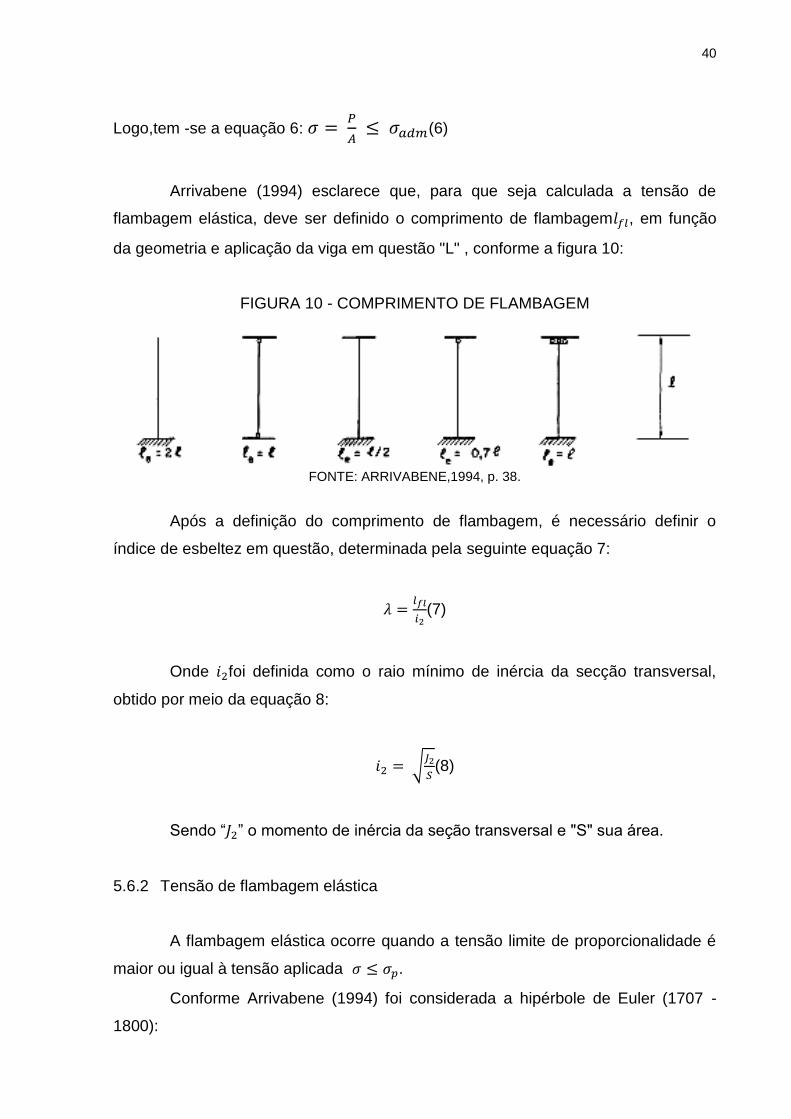
Arrivabene (1994) esclarece que, para que seja calculada a tensão de
flambagem elástica, deve ser definido o comprimento de flambagem𝑙𝑓𝑙, em função
da geometria e aplicação da viga em questão "L" , conforme a figura 10:
FIGURA 10 - COMPRIMENTO DE FLAMBAGEM
FONTE: ARRIVABENE,1994, p. 38.
Após a definição do comprimento de flambagem, é necessário definir o
índice de esbeltez em questão, determinada pela seguinte equação 7:
𝜆 =𝑙𝑓𝑙
𝑖2(7)
Onde 𝑖2foi definida como o raio mínimo de inércia da secção transversal,
obtido por meio da equação 8:
𝑖2 = √𝐽2
𝑆(8)
Sendo “𝐽2” o momento de inércia da seção transversal e "S" sua área.
5.6.2 Tensão de flambagem elástica
A flambagem elástica ocorre quando a tensão limite de proporcionalidade é
maior ou igual à tensão aplicada 𝜎 ≤ 𝜎𝑝.
Conforme Arrivabene (1994) foi considerada a hipérbole de Euler (1707 -
1800):

41
GRÁFICO 1- TENSÃO DE FLAMBAGEM x ÍNDICE DE ESBELTEZ
FONTE: ARRIVABENE,1994, p.
E definida a flambagem elástica como descrita na equação 9:
𝜎𝑓𝑙 = 𝜋2.𝐸
𝜆2(9)
E a carga correspondente a esta tensão é dada pela equação 10:
𝑃𝑓𝑙 = 𝜎𝑓𝑙 . 𝑆 =𝜋2.𝐸.𝐽2
𝑙𝑓𝑙2 (10)
Condicionado a𝜎𝑓𝑙 = 𝜎𝑝de acordo com a equação 11:
𝜆 ≥ 𝜆𝐸𝑢𝑙𝑒𝑟𝑙𝑖𝑚 = 𝜋. √
𝐸
𝜎𝑝(11)
Logo, admite-se que, equação 12:
𝜆 ≥ 𝜆𝐸𝑢𝑙𝑒𝑟𝑙𝑖𝑚 ·. 𝑃𝑓/𝑐 (c = coeficiente de segurança)(12)
5.6.3 Flambagem não elástica em estruturas metálicas
Para que seja possível definir este tipo de flambagem considerou-se o
método do coeficiente de flambagem “𝜔", ao qual é dado por 𝜎𝑐 = 𝑃/𝑆 ≤ 𝜎�̅� , onde
42
𝜎�̅� varia conforme o material utilizado e com o índice de esbeltez expressa na
equação 13:
𝜔. 𝑃/𝑆 ≤ 𝜎�̅�(13)
Sendo 𝜔 𝑒 𝜎�̅�constantes tabelas de acordo com cada tipo de material
utilizado.
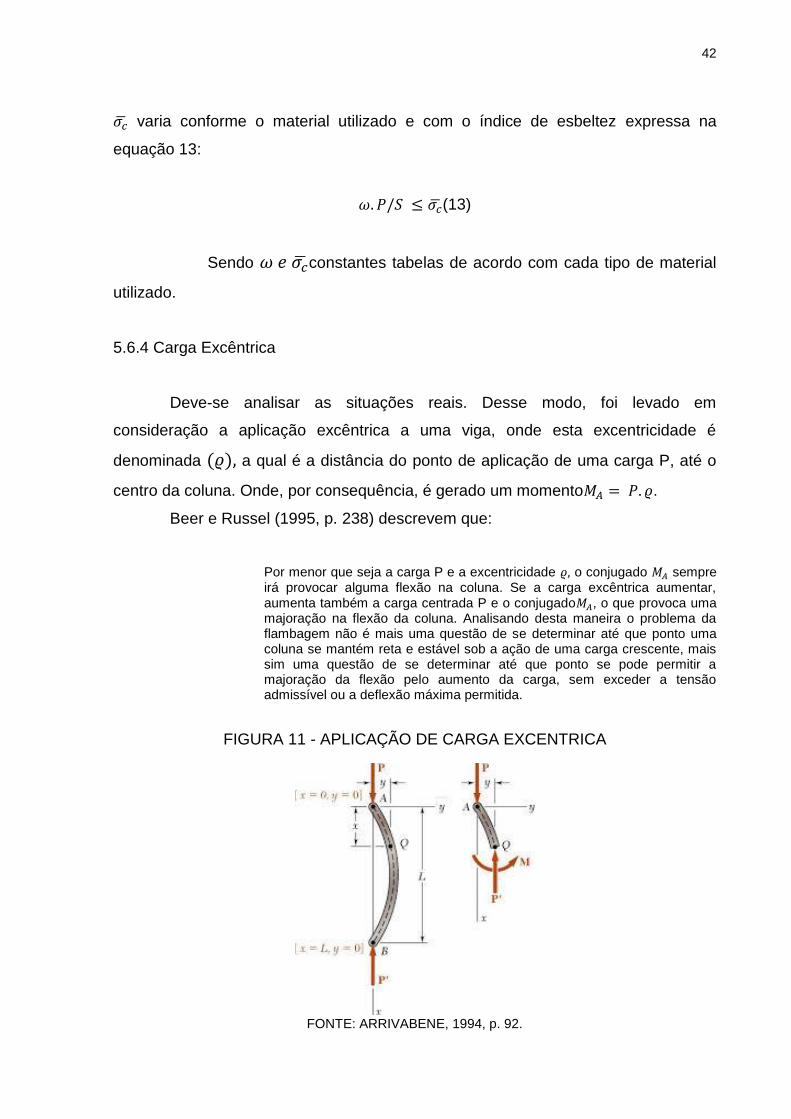
5.6.4 Carga Excêntrica
Deve-se analisar as situações reais. Desse modo, foi levado em
consideração a aplicação excêntrica a uma viga, onde esta excentricidade é
denominada (𝜚), a qual é a distância do ponto de aplicação de uma carga P, até o
centro da coluna. Onde, por consequência, é gerado um momento𝑀𝐴 = 𝑃. 𝜚.
Beer e Russel (1995, p. 238) descrevem que:
Por menor que seja a carga P e a excentricidade 𝜚, o conjugado 𝑀𝐴 sempre irá provocar alguma flexão na coluna. Se a carga excêntrica aumentar, aumenta também a carga centrada P e o conjugado𝑀𝐴, o que provoca uma majoração na flexão da coluna. Analisando desta maneira o problema da flambagem não é mais uma questão de se determinar até que ponto uma coluna se mantém reta e estável sob a ação de uma carga crescente, mais sim uma questão de se determinar até que ponto se pode permitir a majoração da flexão pelo aumento da carga, sem exceder a tensão admissível ou a deflexão máxima permitida.
FIGURA 11 - APLICAÇÃO DE CARGA EXCENTRICA
FONTE: ARRIVABENE, 1994, p. 92.

43
Admitindo-se uma carga excêntrica, porém sobre o eixo central de inércia y,
de acordo com a equação 14:
𝜎 = 𝑃
𝑆 +
𝑃.𝑒
𝜔𝑥(14)
Arrivabene (1994, p.93), explica que, “o coeficiente de segurança c varia de
1,75 a 3,5 em função de 𝜆". Logo, a carga de flambagem, descrita na equação 15:
𝑃𝑓𝑙 = 𝑃. 𝑐(15)
5.7 TRANSMISSÃO POR PARAFUSO DE POTÊNCIA
As roscas são um conjunto de filetes que contornam corpos cilíndricos, já os
parafusos são corpos constituídos por roscas que servem para fixação e
transmissão de movimentos (GORDO; FERREIRA, 2012). Os perfis das roscas são
diversos, e os seus diferentes tipos, são utilizados conforme sua aplicação -Quadro
9:
QUADRO 9 - APLICAÇÃO DAS ROSCAS
FONTE: GORDO E FERREIRA, 2012, p.35.

44
Os parafusos que possuem o objetivo de transmissão de movimento podem
ser de dois tipos: os parafusos de rosca sem fim (ou simplesmente parafusos sem
fim); e os parafusos de potência - também chamados de parafusos de avanço ou de
fuso. Esses tipos de parafuso são aplicados juntamente com porcas especiais
(buchas ou mancais roscados) para simplesmente transformar o movimento angular
(rotação) em movimento linear (translação retilínea) de um determinado mecanismo
(SHIGLEY; MISCHKE; BUDYNAS, 2005), conforme a figura 12:
FIGURA 12 -PARAFUSOS DE AVANÇO COM PORCAS ESPECIAIS
FONTE: THOMPSON LINEAR MOTION, 2015, p.2.
Em qualquer tipo de transmissão é inevitável a perda de potência originada
pelos atritos entre as superfícies que estão em contato e também pela agitação do
óleo em casos de lubrificação continua em partes dos elementos de transmissão
(MELCONIAN, 2008). Alguns experimentos demonstraram que o coeficiente de atrito
entre um parafuso de potência de aço e a bucha de ferro fundido ou bronze vale
cerca de 015±0,05 (quando lubrificados por óleo) (NORTON, 2000).Shigley, Mischke
e Budynas(2005)descrevem alguns resultados de coeficiente de atrito para algumas
combinações de materiais para o parafuso e a porca - Tabela 2:
TABELA 2 - COEFICIENTE DE ATRITO PARA COMBINAÇÃO DO MATERIAL DO PARAFUSO E DA PORCA
FONTE: SHIGLEY;MISCHKE; BUDYNAS, 2005, p.396.
45
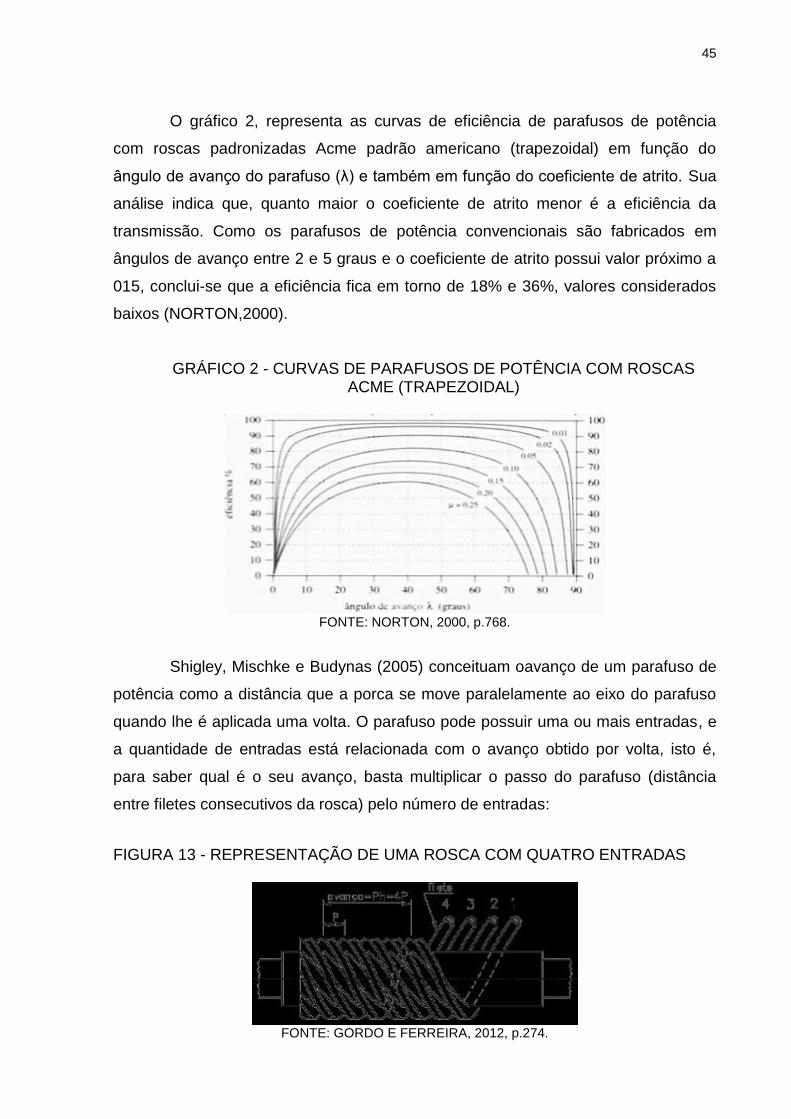
O gráfico 2, representa as curvas de eficiência de parafusos de potência
com roscas padronizadas Acme padrão americano (trapezoidal) em função do
ângulo de avanço do parafuso (λ) e também em função do coeficiente de atrito. Sua
análise indica que, quanto maior o coeficiente de atrito menor é a eficiência da
transmissão. Como os parafusos de potência convencionais são fabricados em
ângulos de avanço entre 2 e 5 graus e o coeficiente de atrito possui valor próximo a
015, conclui-se que a eficiência fica em torno de 18% e 36%, valores considerados
baixos (NORTON,2000).
GRÁFICO 2 - CURVAS DE PARAFUSOS DE POTÊNCIA COM ROSCAS ACME (TRAPEZOIDAL)
FONTE: NORTON, 2000, p.768.
Shigley, Mischke e Budynas (2005) conceituam oavanço de um parafuso de
potência como a distância que a porca se move paralelamente ao eixo do parafuso
quando lhe é aplicada uma volta. O parafuso pode possuir uma ou mais entradas, e
a quantidade de entradas está relacionada com o avanço obtido por volta, isto é,
para saber qual é o seu avanço, basta multiplicar o passo do parafuso (distância
entre filetes consecutivos da rosca) pelo número de entradas:
FIGURA 13 - REPRESENTAÇÃO DE UMA ROSCA COM QUATRO ENTRADAS
FONTE: GORDO E FERREIRA, 2012, p.274.

46
Os valores para o passo de uma rosca trapezoidal padrão e suas
características, podem ser observados no quadro 10:
QUADRO 10 - DIÂMETRO PASSO E COMPRIMENTO
FONTE: A.T.I BRASIL, 2016,1.
5.8 REDUTORES DE VELOCIDADE
Antunes e Freire (2000) afirmam que, os sistemas de transmissão mecânica
são mecanismos manuais ou automáticos que tem como principal função transmitir
movimento e potência a partir de elementos puramente mecânicos. Conforme os
autores, nas transmissões de movimentos é possível identificar a relação de
transmissão de um sistema e, consequentemente, suas rotações. Portanto, deve-se
verificar se o sistema é redutor ou ampliador. Para considerar um sistema ampliador,
o movimento deverá passar da engrenagem maior para a engrenagem menor, o que
aumenta, desta forma, a rotação.
Em um sistema redutor, ao contrário, o movimento deverá passar da
engrenagem ou polia menor para a maior, o que reduz,a rotação do sistema,
(ANTUNES; FREIRE, 2000).
Segundo Gordo e Ferreira (2000), a transmissão de força e movimento pode
ser feira pela forma ou por atrito. A transmissão por forma é a mais utilizada e leva
este nome porque a forma dos elementos transmissores é dimensionada para se

47
encaixarem e, desta forma, transmitir o movimento e a força. Já a transmissão por
atrito oferece uma boa centralização das peças ligadas aos eixos, mas não é
aconselhada para fazer a transmissão de grandes esforços.
5.8.1 Transmissão por correias
Segundo Marco (2013), as principais características a serem destacadas nas
transmissões por correias é que elas funcionam essencialmente por atrito, e são
adequadas para grandes distancias entre eixos. Almeida (2012), complementa que
esta maneira de transmissão pode ser simples, quando existe somente uma polia
motora e uma polia movida. Alguns fatores podem afetar o sistema de transmissão,
dentre os principais a falta de atrito, pois, quando em serviço a correia pode deslizar
e, desta forma, não transmitir integralmente a potência. Para o autor, as correias
podem ser fabricadas em várias formas e com diversos materiais, e são bastante
utilizadas nas indústrias de máquinas operatrizes e automotivas. Esses elementos
podem ser encontrados nos mais diversos equipamentos, como pequenos aparelhos
eletrônicos até equipamentos maiores como máquinas do ramo agrícola.
Antunes e Freire (2000) afirmam que, as transmissões por correias são
utilizadas tanto para eixos paralelos como para eixos reversos. Este tipo de
transmissão caracteriza- se por sua construção simples, funcionamento silencioso e
uma grande capacidade de absorver choques elasticamente. O rendimento é
considerado elevado, e varia de 95% a 98%.
Na década de 30, as correias em V ou trapezoidais,figura14, passaram a ser
usadas na maioria dos acionamentos.
FIGURA 14 - CORREIA EM V
FONTE: GOODYEAR, 2010, p.3.

48
A vantagem consiste no efeito de que a cunha da correia na polia multiplica
o coeficiente de atrito pelo inverso do seno do ângulo de inclinação da face lateral.
Tudo isso, resulta em um significativo ganho de capacidade, ao proporcionar
conjuntos mais compactos, com menor nível de ruído se comparados com as
correias planas (ALMEIDA, 2012).
Os fabricantes padronizaram as dimensões das seções transversais de
correias em V, apresentadas na tabela 3, com cada seção designada por uma letra
do alfabeto para tamanhos com dimensões em polegada, já que os tamanhos
métricos são designados por números. Dimensões, tamanhos mínimos de roldanas
e o intervalo de potência para cada uma das sessões são designados por letras
(BUDYNAS; NISBETT, 2011).
TABELA 3 - SEÇÕES DE CORREIAS EM V PADRONIZADAS
FONTE: ADAPTADO DE BUDYNAS; NISBETT, 2011, p.9.
As correias em V e trapezoidais possuem, também, em relação às planas,
alguns aspectos negativos que, evidentemente, não chegam a comprometer o seu
uso, na maioria dos casos. Correias trapezoidais são, normalmente, fornecidas em
dimensões padronizadas, e seu alinhamento é mais crítico.
O material das correias planas pode ser fornecido em rolos, e elas podem
ser produzidas no local em qualquer comprimento (ALMEIDA, 2012). Ainda de
acordo com o autor, outro fator que contribui a favor deste meio, são as razões
econômicas, já que elas são de difícil montagem e manutenção, não utilizam
lubrificantes, tem boa durabilidade quando projetadas e instaladas corretamente e
são padronizadas. Ele também ressalta a questão da segurança, uma vez que elas
reduzem os choques e vibrações, limitam a sobrecarga pela ação do deslizamento e
tem um funcionamento de pouco ruído.
49
5.8.2 Polias
Para Silva et al. (2012), as polias são denominadas como elementos
mecânicos circulares, com ou sem canais periféricos, acoplados a eixos motores e
movidos por máquinas e equipamentos. Para as mesmas funcionarem, necessitam
da presença de vínculos chamados correias. Quando em funcionamento as polias
podem transferir e transformar movimentos de um ponto para outro da máquina, e
sempre há a transferência de força.
Podem ser classificadas em plans e trapezoidais. As polias trapezoidais são
conhecidas pelo nome de polias em ‘V’, e são as mais utilizadas em máquinas.
Os materiais para a construção das polias são, normalmente, de ferro
fundido, aço, liga leve e de materiais sintéticos. A porosidade é uma característica
que não deve ser elevada na superfície das polias, pois, se for, à correia pode ter
um significativo desgaste (SILVA et al. 2012).
5.9 MOMENTO DE INÉRCIA
O momento de inércia é quando um corpo com massa qualquer apresenta
sua tendência de permanecer em seu estado inicial de movimento (ENGIOBRA,
2015). A análise quantitativa do momento de inércia realizado pelo fuso de rosca
trapezoidal,simbolizado por I, permite a seguinte equação 16:
𝐼 = 𝑚. 𝑅²(16)
Logo, um corpo de massa ‘m’, onde o centro de massa está posicionado a
uma distância R do ponto de análise em torno do qual este objeto pode executar um
movimento circular, conforme a Figura 15, na sequência.
50
FIGURA 15 - REPRESENTAÇÃO DE UM CORPO A UMA DISTÂNCIA R DE SEU EIXO DE ROTAÇÃO
FONTE:UNIVERSIDADE FEDERAL DE SANTA MARIA,2016, p. 2.
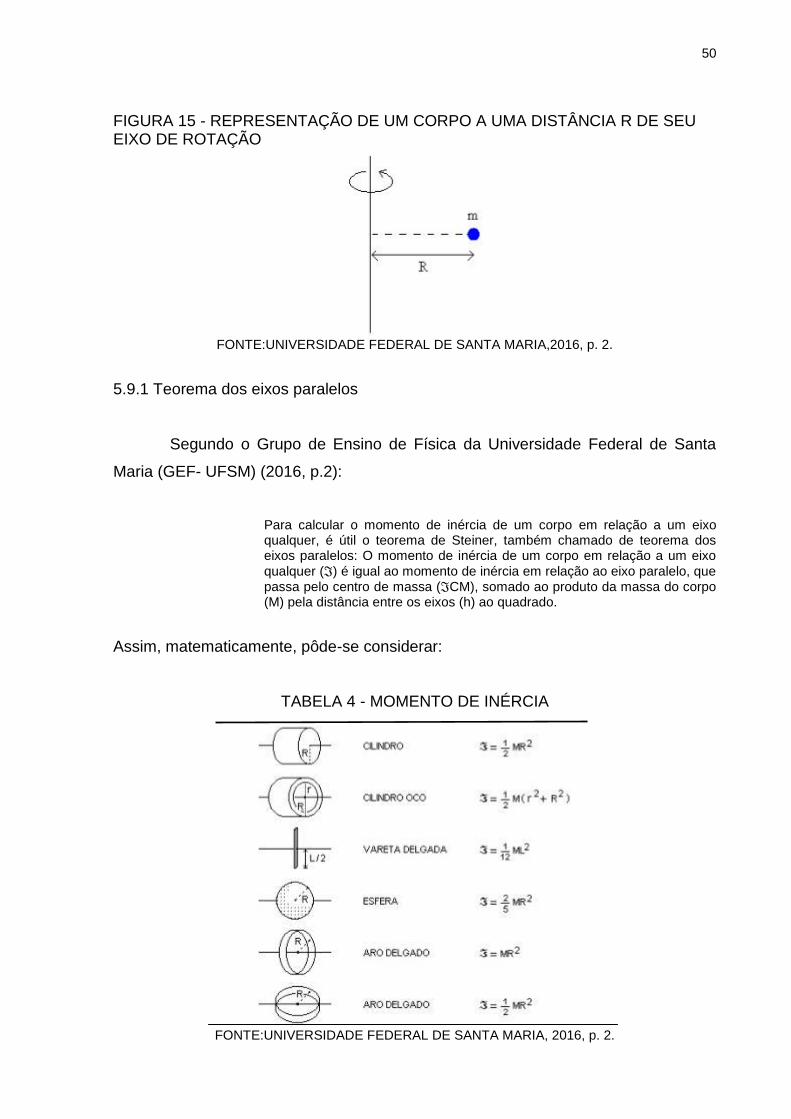
5.9.1 Teorema dos eixos paralelos
Segundo o Grupo de Ensino de Física da Universidade Federal de Santa
Maria (GEF- UFSM) (2016, p.2):
Para calcular o momento de inércia de um corpo em relação a um eixo qualquer, é útil o teorema de Steiner, também chamado de teorema dos eixos paralelos: O momento de inércia de um corpo em relação a um eixo
qualquer (ℑ) é igual ao momento de inércia em relação ao eixo paralelo, que passa pelo centro de massa (ℑCM), somado ao produto da massa do corpo (M) pela distância entre os eixos (h) ao quadrado.
Assim, matematicamente, pôde-se considerar:
TABELA 4 - MOMENTO DE INÉRCIA
FONTE:UNIVERSIDADE FEDERAL DE SANTA MARIA, 2016, p. 2.
51
5.10 SOLDA
Entende-se por solda “a operação que visa a união de duas ou mais peças,
assegurando na junta, a continuidade das propriedades físicas e químicas do
material” (BORGES, 2015, p.1). Devido ao variado número de soldagens é
necessário a seleção do tipo mais adequado para cada aplicação. Portanto, para a
elaboração do elevador para motocicletas, foi utilizado em sua estrutura o processo
de soldagem MIG - Metal InertGas.
5.10.1 Solda Mig
Denomina-se MIG o processo de solda que utiliza a proteção de um gás
inerte e, os mais utilizados são o Argônio (Ar) e o Hélio (He), e que não possui
qualquer atividade física com a poça de fusão.
A soldagem MIG/MAG tem sido muito utilizada na indústria automobilística,
automatizada ou não, na indústria ferroviária, na fabricação de pontes rolantes,
vigas, escavadeiras, tratores,é aplicável à soldagem da maioria dos metais utilizados
na indústria como os aços, o alumínio, aços inoxidáveis, cobre e vários outros. A
produtividade alcançada pelos processos MIG/MAG é alta em virtude de serem
processos semiautomáticos e de admitirem a mecanização, com emprego de
dispositivos de posicionamento e deslocação (FORTES; VAZ, 2005).
5.10.2 Superfícies soldadas sujeitas a carregamentos diretos
O conceito básico da soldagem por fusão, é o superaquecimento dos
materiais que se unem, e formam um único componente - idealmente, homogêneo.
As propriedades das varetas de solda (material de preenchimento) devem ser
compatíveis com as dos materiais a serem unidos. Sempre que possível, as análises
de tensões e de resistência devem ser realizadas como se a peça como um todo
fosse fabricada a partir de um único bloco do material:
As soldas por filetes, [ilustradas na FIGURA 16], são geralmente classificadas de acordo com a direção do carregamento: carga paralela (FIGURA 17 c) ou carga transversal [FIGURAS 17 d e 2 e]. No caso do carregamento paralelo, ambas as placas exercem uma

52
carga de cisalhamento sobre a solda. No caso de carregamento transversal, uma placa exerce uma carga de cisalhamento e a outra uma carga de tração (ou de compressão) sobre a solda. A dimensão da solda é definida pelo comprimento h [FIGURA 17 a]. Em geral, porém não necessariamente, as duas dimensões possuem o mesmo comprimento. A prática convencional da engenharia considera a tensão mais significante da solda como sendo a tensão cisalhante atuante na seção mais estreita, tanto para carregamento paralelo quanto transversal. O comprimento 1 [FIGURA 17 a] é definido como a menor distância medida a partir da interseção das placas até (i) a linha reta que une as extremidades das duas regiões das peças em contato com a solda (FIGURA 16 a') até a superfície do filete [Figura 17 a" ], a que for menor. Para o caso usual de uma solda convexa com dimensões iguais, t = 0,707h. A área utilizada para o cálculo das tensões é, assim, igual ao produto tL, onde L é o comprimento da solda. A dimensão h da solda deve ser compatível com a espessura das placas que vão ser soldadas. Por razões práticas, em geral considera-se uma dimensão h de no mínimo 3 mm para placas com espessura inferior a 6 mm - e de no mínimo 15 mm para placas com espessura acima de 150 mm (JUNIVALL, 2008, p. 258).
FIGURA 16 - CARACTERÍSTICAS DE SOLDA
FONTE: JUNIVALL, 2008, p.258.
FIGURA 17 – SOLDAS E TIPOS DE CARREGAMENTOS
FONTE: JUNIVALL, 2008, p.258.

53
6 CUSTOS DO PROTÓTIPO DO DUPLICADOR
Foi realizado um levantamento de custos - em três empresas metalúrgicas -
para a elaboração do protótipo do duplicador, ao qual foram agregadas as
informações obtidas pelo estudo QFD, para conciliar os seguintes aspectos:
FACILIDADE DE OPERAÇÃO - EFICIÊNCIA - SEGURANÇA - CUSTO MODERADO
- FABRICAÇÃO E PRÉ-MONTAGEM
Com isso, obteve-se o seguinte orçamento - Tabela 5:
TABELA 5 - ORÇAMENTO FINAL
Tipo de material Valor total
Material Mecânico: R$ 1.734,35
Materiais Elétricos: R$ 1.054,00
Serviços: R$ 1.770,00
Total: R$ 4.558,35
FONTE: OS PRÓPRIOS AUTORES, 2016.
Os valores orçados(conforme apêndice D)incluem a fabricação e montagem
da estrutura metálica (serviços) e seus componentes comerciais, juntamente com a
instalação dos componentes elétricos, os falos de fabricação vinculados ao número
de unidades produzidas - quanto maior for a quantidade menor o custo de produção.
A diferença destes valores,repassados ao consumidor, deve-se,
principalmente, aos custos de produção, levando-se em consideração o knowhow
(como fazer) de cada empresa, além de outros fatores como: impostos, fretes, e
(despesas de projeto). É importante ressaltar que, o orçamento mais elevado
totalizou o valor de R$7.800,00.
Considerando-se a aquisição de materiais e a mão de obra da montagem - a
ser realizada pelos idealizadores do projeto - totalizaram a quantia de R$ 4.558,35.
Portanto, foi comprovada uma economia de, aproximadamente, R$ 3.300,00. Ver
Apêndice D- referente a todos os valores pertinentes a elaboração total do protótipo.

54
7 CÁLCULOS DOS ELEMENTOS DE FIXAÇÃO
7.1 DIMENSIONAMENTO DO FUSO TRAPEZOIDAL
Para cada tipo de aplicação existe um fuso diferente. Como um duplicador
de vagas deve suportar uma carga máxima de 600 quilos, optou-se pelo modelo de
fuso trapezoidal TR25 com capacidade de, até, 2 toneladas, ou seja, uma carga 3
vezes acima do limite admissível.
Considerou-se, também, o coeficiente de segurança 2 (mínimo) para
elevação de cargas, estabelecido pela NR 14712 “elevadores elétricos -
elevadores de carga [...]- Requisitos de segurança para projeto, fabricação e
instalação”, o que garante a segurança do dispositivo (ABNT, 2013, p.1).
Com o fuso escolhido e, com base no catálogo A.T. I. Brasil, os valores do
diâmetro do fuso (TR), e do passo (P) foram utilizados para o cálculo do torque. O
fuso érecomendado para realizar o movimento de subida e de descida.
QUADRO 11- DIMENSÃO DE DIAMETRO E PASSO DO FUNDO
FONTE: A.T.I BRASIL, 2016, p.3.

55
FIGURA 18 -CARACTERÍSTICAS DAS ROSCAS TRAPEZOIDAIS
FONTE:A.T.I BRASIL, 2016, p.3.
Estabelecido o passo (P), e o diâmetro (TR), foi determinado, também, o
comprimento de elevação de 1,2 metros, e uma carga máxima de 600 quilos. Com
isso, outros dois parâmetros para o cálculo do torque foram necessários para elevar
e baixar a carga. Na sequência, definiu-se os valores da porca cilíndrica flangeada -
para o fuso TR25.
É na porca cilíndrica flangeada, onde ocorrem todos os esforços ligados
tanto à elevação, como a descida da carga, isto é, a concentração de forças
necessárias para o deslocamento da base de sustentação juntamente com a moto.
A porca cilíndrica flangeada apresenta as seguintes características,
fornecidas pelo fabricante A.T.I Brasil (2016, p.3):
FIGURA 19 - DIMENSÕES DA PORCA CILÍNDRICA FLANGEADA
FONTE: A.T.I BRASIL, 2016, p.3.
Outro produto selecionadofoi a porca quadrada, cuja as características foram
descritas na Figura 20. Ela é um item de segurança que atua somente em caso de

56
falha da porca cilíndrica, para garantir o máximo de segurança. Isto é, quanto ao
acionador de potência no fuso, ele impede que, eventualmente, possa ocorrer a
queda súbita da carga.
FIGURA 20- DIMENSÕES DA PORCA QUADRADA
FONTE: A.T.I BRASIL, 2016, p. 3.
Com base nos dados coletados, apontou-se as seguintes medidas para o
cálculo do torque no fuso através de roscas trapezoidais:
d= 25mm (diâmetro do fuso);
P=5mm (passo do fuso);
f=fc=0,08 (coeficiente de atrito do colar);
dc=60mm (diâmetro do colar);
F=6kN;
Rosca Simples= 1.
Primeiro, calculou- se o diâmetro do passo (dm), de acordo com as
equações 17:
𝑑𝑚 = 𝑑 −𝑃
2(17)
𝑑𝑚 = 25 −5
2
𝑑𝑚 = 22,5 𝑚𝑚
Em seguida, foi definido o diâmetro menor (dr), equação 18:
57
𝑑𝑟 = 𝑑 − 𝑃(18)
𝑑𝑟 = 25 − 5
𝑑𝑟 = 2𝑂 𝑚𝑚
Foi necessário, definir, também, o avanço (L), medida que indica o
deslocamento gerado pelo fuso a cada volta que o fuso seja rotacionado.
Para o cálculo do avanço é necessário conhecer uma característica
construtiva, e o número de entradas que o fuso possui. No caso do duplicador de
vagas foi utilizado um fuso com apenas uma entrada, com isso, tem-se a seguinte
resolução, de acordo com a seguinte equação 19:
𝐿 = 𝑛 ∗ 𝑃(19)
𝐿 = 1 ∗ 5
𝐿 = 5 𝑚𝑚
Resistência ao cisalhamento, equações 20 e 21:
𝜎𝑚á𝑥 =𝐹
𝐴(20)
𝑎 =𝐹𝑝
𝐴𝑒𝑓(21)
Considerações sobre a força (F):
Porca:
Diâmetro externo = 25 mm
Diâmetro Interno = 20 mm
Passo = 5 mm
Comprimento (L) = 45 mm
Número de roscas efetivas (N) = de acordo com as equações 22:
𝑁 =𝐿
𝑃(22)
𝑁 =45
9= 9 𝑅𝑜𝑠𝑐𝑎𝑠 𝑒𝑓𝑒𝑡𝑖𝑣𝑎𝑠
58
Distribuição da força na porca:
Força total = 6 KN
Rosca efetiva = 9 Roscas efetivas
Força por passo = 6/9 = 0,667 KN
Considerações sobre a área efetiva, equação 23:
𝐴𝑒𝑓 = ℎ 𝑚é𝑑𝑖𝑎 𝑑𝑎 𝑟𝑜𝑠𝑐𝑎 ∗ 𝐶𝑖𝑟𝑐𝑢𝑛𝑓𝑒𝑟ê𝑛𝑐𝑖𝑎 𝑚é𝑑𝑖𝑎ℎ = 2,5 𝑚𝑚(23)
𝑡𝑔𝛼 =5
22,5
𝑡𝑔𝛼 = 0,222
𝛼 = 𝐴𝑟𝑐𝑡𝑔 0,222
𝛼 = 12,5°
Equação 24, onde:
𝐿 =𝐶𝑎𝑡.𝐴𝑑𝑗
𝐶𝑜𝑠 𝛼 (24)
𝐿 =22.5
𝐶𝑜𝑠 12,5°
𝐿 = 23,04 𝑚𝑚
Circunferência média (Cm), equação 25:
𝐶𝑚 = 𝜋 ∗ 𝐿 (25)
𝐶𝑚 = 𝜋 ∗ 23,04
𝐶𝑚 = 72,40 𝑚𝑚
𝐴𝑒𝑓 = ℎ 𝑚é𝑑𝑖𝑎 𝑑𝑎 𝑟𝑜𝑠𝑐𝑎 ∗ 𝐶𝑖𝑟𝑐𝑢𝑛𝑓𝑒𝑟ê𝑛𝑐𝑖𝑎 𝑚é𝑑𝑖𝑎(26)
𝐴𝑒𝑓 = 2,5 ∗ 72,40
𝜎 𝐶𝑖𝑠𝑎𝑙ℎ𝑎𝑚𝑒𝑛𝑡𝑜 𝑟𝑜𝑠𝑐𝑎=
0,667
181
(27)
𝜎 𝐶𝑖𝑠𝑎𝑙ℎ𝑎𝑚𝑒𝑛𝑡𝑜 𝑟𝑜𝑠𝑐𝑎= 3,68 𝑀𝑃𝑎
Valores tabeladosconforme figura 20:
Aço 1020 =𝜎𝑚á𝑥 = 210 𝑀𝑃𝑎 ( 𝑒𝑠𝑐𝑜𝑎𝑚𝑒𝑛𝑡𝑜)𝑒 250 𝑀𝑃𝑎 (𝑢𝑙𝑡𝑖𝑚𝑎)

59
Aço 11SMnPb37 = Limite resistência (mínima) = 460 Mpa
𝜎𝑚á𝑥 = 0,6 ∗ 460
𝜎𝑚á𝑥 = 276 𝑀𝑃𝑎 𝑛𝑎 𝑟𝑜𝑠𝑐𝑎
Como a 𝜎𝑚á𝑥aplicada será de 3,68 Mpa o fuso atende as tensões aplicadas em
cisalhamento.
7.1.1 Cálculo do Torque
Para o cálculo do torque, foi utilizaram -se as equações a seguir em dois
cenários: o primeiro elevando a carga, onde o fuso realiza o seu maior torque, pois
atua contra a aceleração da gravidade. Torque requerido para girar o parafuso
contra a carga (subida) (TR), descrita pela equação 28, onde:
𝑇 = 𝐹 ∗𝑑𝑚
2(
𝐿+𝜋∗𝐹∗𝑑𝑚
𝜋∗𝑑𝑚−𝑓𝑐∗𝑙) +
𝐹∗𝑓𝑐∗𝑑𝑐
2(28)
𝑇 = 6 ∗22,5
2(
5 + 𝜋 ∗ 6 ∗ 22,5
𝜋 ∗ 22,5 − 0,08 ∗ 5) +
6 ∗ 0,08 ∗ 60
2
𝑇 = 22,5 𝑁. 𝑚
E, o segundo, o torque requerido para descida (TL), equação 29:
𝑇𝐿 = 𝐹 ∗𝑑𝑚
2(
𝜋∗𝐹∗𝑑𝑚−𝑙
𝜋∗𝑑𝑚+𝑓𝑐∗𝑙) +
𝐹∗𝑓𝑐∗𝑑𝑐
2(29)
𝑇𝐿 = 6 ∗22,5
2(
𝜋 ∗ 6 ∗ 22,5 − 5
𝜋 ∗ 22,5 + 0,08 ∗ 5) +
6 ∗ 0,08 ∗ 60
2
𝑇𝐿 = 15,01 𝑁. 𝑚
O cálculo do torque necessário para elevar e baixar a carga é indispensável
para a escolha do motor, cujas características devem corresponder aos valores
encontrados.
7.1.2 Calculo de deformação angular devido ao torque no fuso
Conforme a equação 30:

60
Ф =𝑇𝑟∗𝐿
𝐽∗𝐺(30)
Na qual:
Ф = Deformação angular
Tr = Torque no fuso = 22.5 KN
L = Comprimento = 1330 mm
J = Momento polar de inercial
G = Modulo de Elasticidade transversal = 80 Mpa
𝐽 = 𝜋 ∗𝐷4
32
𝐽 = 15708 𝑚𝑚
Ф =𝑇𝑟 ∗ 𝐿
𝐽 ∗ 𝐺
Ф =22,5 ∗ 1330
15708 ∗ 80
Ф = 0,0238 𝑟𝑎𝑑
Transformado para graus:
𝜋 𝑟𝑎𝑑 − 180°
0,0238 𝑟𝑎𝑑 − ∅
∅ = 1,36°
A partir disso, calculou- se a tensão máxima de torção para o fuso, equação 31:
𝜎𝑚á𝑥 =𝑇𝑟∗⍴
𝐽(31)
𝜎𝑚á𝑥 =22,5 ∗ 10
15708
𝜎𝑚á𝑥 = 15 𝑀𝑝𝑎 𝑝𝑎𝑟𝑎 𝑡𝑜𝑟çã𝑜
Como a torção da área de seção da alma do fuso será de 14Mpa o fuso
atende as tensões máximas de cisalhamento de 276 Mpa.
7.2 DIMENSIONAMENTO DO MOTOR

61
Após a definição do torque de elevação e de descida realizado pelo fuso,
foram utilizados os dados de T e TL, como base para a definição do motor, com as
seguintes características: T=22,5 N/m e TL=15 N/m. Deste modo, para atender a
este torque, buscou-se um sistema redutor de velocidade, no qual foi possível
dimensionar um motor equivalente que trabalhe com um jogo de correias para
diminuir a velocidade e o torque, proporcionalmente, com o intuito de reduzir os
custos de aquisição deste motor.Ao trabalhar-se a relação de 1/10 entre polias, para
atender ao requisito de velocidade máxima admissível de 170 rpm na porca
cilíndrica, tem - se um torque de TR=2,25 N/m e TL=1,50 N/m.
Com base nestes dados de entrada, foi escolhido o seguinte motor, do
fornecedor WEG: Motor monofásico de corrente alternada de0,75CV 4P 127/220V71
B14D 6TERM IP55 IE1 FC-DIN 60Hz W22 - Figura 21:
FIGURA 21 -MOTOR WEG W22 IR2
FONTE: WEG, 2016, p.16.
No qual:
Potência (P) = 0,75CV
Tensão (U) = monofásico, 220V
Rotação Nominal = 1690 rpm
Torque do motor =3,13 N/m
Com as características apresentadas, comparou-se o torque calculado no
fuso T(2,25 N/m)e o torque disponível no motor de 3,13 N/m, quer dizer, um motor
dimensionado com aproximadamente 39% de sua capacidade de elevação.
Para fixação do motor, foi utilizado um dispositivo que possibilita o ajuste da
carreia, que pode deslocar o motor em um curso pré-definido e localizado na parte
superior do duplicador, fixado a viga I, conforme a figura 22.

62
FIGURA 22 - FIXAÇÃO DO MOTOR
FONTE: EDAKI, 2016, p 38.
7.3 DIMENSIONAMENTO DO REDUTOR
Para o dimensionamento das polias que fazem o acoplamento junto ao fuso
de rosca trapezoidal, precisa- se, primordialmente, da relação entre estas polias, a
qual foi definida em 1/10, e as velocidades admissíveis em projeto, que é a
velocidade do motor e a velocidade de giro máximo admissível pela porca cilíndrica.
Com isso, foramanalisados os seguintes dados:
a) rotação do motor: 1690 rpm;
b) rotação do Fuso: 169 rpm;
c) relação entre polias: 1/10;
d) diâmetro do motor: 32mm.
O tamanho das polias foi calculado por meio da seguinte equação 32:
𝑟𝑝𝑚 𝑑𝑜 𝑚𝑜𝑡𝑜𝑟
𝑟𝑝𝑚 𝑑𝑜 𝑓𝑢𝑠𝑜=
𝐷𝑖𝑎𝑚𝑒𝑡𝑟𝑜 𝑑𝑜 𝐹𝑢𝑠𝑜
𝐷𝑖𝑎𝑚𝑒𝑡𝑟𝑜 𝑑𝑜 𝑚𝑜𝑡𝑜𝑟(32)
1690
169=
𝑥
32
𝑥 = 320 𝑚𝑚
Por meio do dimensionamento do redutor de velocidade, foi definido o
comportamento de transmissão de forças entre o motor elétrico e o fuso girante:
FIGURA 23 - FORÇAS ENTRE MOTOR ELÉTRICO E FUSO GIRANTE
63
FONTE:OS PRÓPRIOS AUTORES, 2016.
7.4 DIMENSIONAMENTO DO TEMPO DE ELEVAÇÃO
A fim de agregar valor ao duplicador de vagas, propôs -se um dispositivo
prático, e de rápida operação. Com isso, foi desenvolvido um equipamento com
tempo de operação curto. Trabalhar com a questão de tempo neste protótipo do
duplicador, significa agregar custos a ele, visto que, consegue-se tempos de
elevações menores ao se utilizar fusos de roscas trapezoidais com mais entradas,
porém, com um valor muito mais elevado.
Para determinar o tempo de elevação da carga, teve-se como premissa o
limitador de velocidade de giro do fuso por conta da porca flangeada, que tem de
trabalhar com uma velocidade do fuso em 169 rpm; o número de entradas - vistas no
capítulo sobre roscas trapezoidais-; o passo da rosca, o que determina o
deslocamento horizontal e a altura a ser deslocada a carga.
𝑅𝑜𝑡𝑎çã𝑜 𝑑𝑜 𝑓𝑢𝑠𝑜 = 169 𝑟𝑝𝑚
𝑃𝑎𝑠𝑠𝑜 𝑑𝑜 𝑓𝑢𝑠𝑜 = 5 𝑚𝑚 , ou 0,005mm
𝐴𝑙𝑡𝑢𝑟𝑎 𝑑𝑒 𝑒𝑙𝑒𝑣𝑎çã𝑜 = 1200 𝑚𝑚 𝑜𝑢 1,2 𝑚
1 𝑚𝑖𝑛 = 60 𝑠𝑒𝑔 = 169 𝑟𝑝𝑚
𝑇𝑒𝑚𝑝𝑜 𝑑𝑒 𝑒𝑙𝑒𝑣𝑎çã𝑜 𝑒𝑚 1 𝑚𝑖𝑛𝑢𝑡𝑜 = 169 𝑟𝑝𝑚 ∗ 0,005
𝐸𝑙𝑒𝑣𝑎çã𝑜 𝑒𝑚 1 𝑚𝑖𝑛𝑢𝑡𝑜 = 0,845 𝑚
60 𝑠𝑒𝑔
𝑥 𝑠𝑒𝑔=
0,845 𝑚
1,2 𝑚
𝑥 = 85,20 𝑠𝑒𝑔
7.5 DIMENSIONAMENTO DA VELOCIDADE DE ELEVAÇÃO

64
Após o cálculo do tempo de elevação, foi utilizado juntamente com a
altura a ser deslocada a carga que é de 1,2 m. Na qual, a equação 33 descreve:
∆𝑥 = 1,2 𝑚 (33)
∆𝑡 = 85,20 𝑠𝑒𝑔
𝑣 =∆𝑥
∆𝑡
𝑣 =1,2
85,20
𝑣 = 0,0140 m/seg
7.6 CÁLCULOS ESTRUTURAIS
Foram calculados,primeiramente, os esforços aplicados aos braços de
sustentação e a viga utilizada.
7.6.1 Esforços aplicados nos braços de sustentação
Conforme diagrama de corpo livre esquematizado a seguir, pôde-se chegar a
definição das forças atuantes, equação 34e 35:
FIGURA 24 - ESQUEMA BRAÇOS
FONTE: OS PRÓPRIOS AUTORES, 2016.
+→
∑ 𝐹𝑥 = 0 (34)
+↑ ∑ 𝐹𝑦 = −6 + 𝐹𝑓 = 0 ⟹ 𝐹𝑓 = 6𝐾𝑁

65
+↺
∑ 𝑀𝐴 = 𝐹𝑥1. 200 + 𝐹𝑥2. 200 − 6.10 = 0 (35)
200𝐹𝑥1 + 200𝐹𝑥2 = 6480
No qual,𝑑1 = 𝑑2, logo 𝐹𝑥1 = 𝐹𝑥2
Obteve-se:
200𝐹𝑥1 + 200𝐹𝑥1 = 6480 (36)
Logo:
𝐹𝑥1 = 16,2 𝐾𝑁
Com isso, determinaram-se os esforços, os quais atuam nos braços de
sustentação e na viga I, o que possibilitou equacionar os esforços cortantes ‘V’ e o
momento fletor ‘M’.
Para a elaboração da análise de esforços cortantes, de início, foi seccionado
o objeto em estudo para a melhor compreensão das forças que atuam no ponto
estudado, onde avaliou-se a eminência do ponto tanto a sua esquerda “E”, quanto a
sua direita “D”. Em seguida, foram obtidos os seguintes valores:
𝑉𝐷 = 0
𝑉𝐴𝐸 = 0
𝑉𝐴𝐷 = 6𝐾𝑁
𝑉𝐴𝐸 = 6𝐾𝑁
𝑉𝐵𝐷 = 0
𝑉𝐶 = 0
𝑉𝑚á𝑥 = 6𝐾
FIGURA 25 - ESFORÇOS CORTANTES NOS BRAÇOS

66
FONTE: OS PRÓPRIOS AUTORES, 2016.
O mesmo procedimento de análise em seções foi realizado para o cálculo do
momento fletor, de acordo com a equação 37.
𝑀𝐷 = 0(37)
𝑀𝐴 = 0
𝑀𝐵 = 6𝑥1,08 , onde 𝑀𝐶 = 6,48𝑁. 𝑚
𝑀𝐷 = 0
FIGURA 26 -MOMENTO FLETOR NOS BRAÇOS
FONTE: OS PRÓPRIOS AUTORES,2016.
7.6.2 Tensões aplicadas ao braço de sustentação
Para determinar a tensão máxima aplicada nos braços de sustentação,
deve-se partir da seguinte formulação, equação 38:
𝐼𝑙𝑛 = ∑ (𝑏.ℎ3
12+ 𝐴. (𝑦𝑐𝑔 + �̅�)) , logo(38)

67
𝐼𝑙𝑛 = 4,35𝑥1003
12+ (4,35𝑥100𝑥(50 − 2,175)2)
𝐼𝑙𝑛 = 1357445,3
Com isso, pôde -se definir a tensão aplicada ao braço de sustentação, por
meio da seguinte equação39:
𝜎𝑚á𝑥 = 𝑀𝑚á𝑥.�̅�
𝐼𝐿𝑁(39)
Logo:
𝜎𝑚á𝑥 =6480𝑥50
1357445,3
𝜎𝑚á𝑥 = 230 𝑀𝑃𝑎
FIGURA 27- ÁREA DE SECÇÃO DO TUBO DOS BRAÇOS
FONTE: OS PRÓPRIOS AUTORES, 2016.
Para o cálculo de cisalhamento foi admitido que, 𝛿𝑚á𝑥 =𝑉𝑚á𝑥
𝐴𝑎𝑙𝑚𝑎(40)
Onde foi obtido, 𝛿𝑚á𝑥 = 6𝐾𝑁
435 𝑚𝑚²
δ = 1,3 MPa
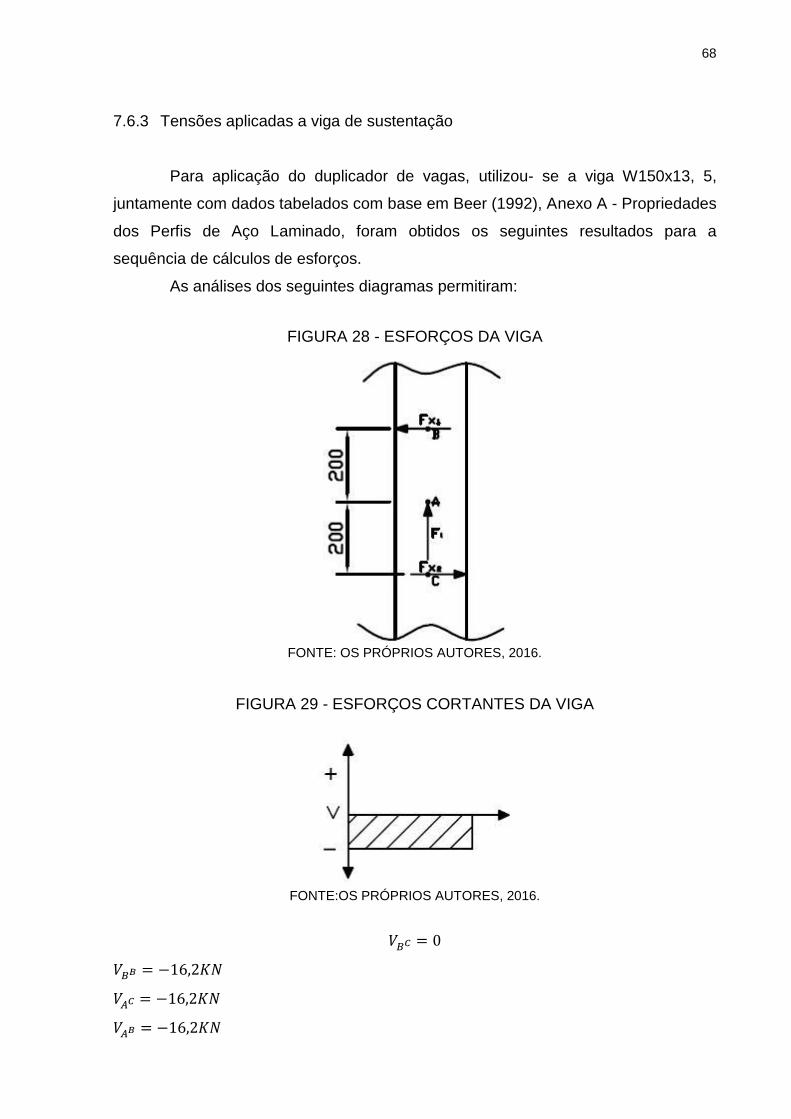
68
7.6.3 Tensões aplicadas a viga de sustentação
Para aplicação do duplicador de vagas, utilizou- se a viga W150x13, 5,
juntamente com dados tabelados com base em Beer (1992), Anexo A - Propriedades
dos Perfis de Aço Laminado, foram obtidos os seguintes resultados para a
sequência de cálculos de esforços.
As análises dos seguintes diagramas permitiram:
FIGURA 28 - ESFORÇOS DA VIGA
FONTE: OS PRÓPRIOS AUTORES, 2016.
FIGURA 29 - ESFORÇOS CORTANTES DA VIGA
FONTE:OS PRÓPRIOS AUTORES, 2016.
𝑉𝐵𝐶 = 0
𝑉𝐵𝐵 = −16,2𝐾𝑁
𝑉𝐴𝐶 = −16,2𝐾𝑁
𝑉𝐴𝐵 = −16,2𝐾𝑁

69
𝑉𝐶𝐶 = −16,2𝐾𝑁
𝑉𝐶𝐵 = 0
Para o cálculo dos momentos fletores
FIGURA 30 -ESQUEMA MOMENTO FLETOR NA VIGA
FONTE: OS PRÓPRIOS AUTORES, 2016.
𝑀𝐵 = 0
𝑀𝐴 = 16,2𝑋200, logo 𝑀𝐹 = 3240𝐾𝑁. 𝑚𝑚 ⇒ 3,24𝐾𝑁. 𝑚
𝑀𝐶 = 0
FIGURA 31 - SECÇÃO DA VIGA
FONTE: OS PRÓPRIOS AUTORES, 2016.
Por consequência da utilização de uma viga de secção transversal simétrica,
pôde-se considerar: �̅� = 𝑑/2(equação 41) onde “d” é a altura da secção transversal
à força aplicada.
Logo:
�̅� = 100/2(41)

70
�̅� = 2
Com base em Beer (1992), foram considerados os dados fornecidos pela
Tabela de Propriedades dos Perfis de Aço Laminado (vide Apêndice E):
𝐼𝐿𝑁 = 916000 𝑚𝑚3
A partir desses referenciais, pôde-se encontrar os valores das Tensões
Máximas aplicadas ao sistema, ao que se segue, equação 42:
𝜎𝑚á𝑥 =3240𝐾𝑁.𝑚𝑚.50𝑚𝑚
916000(42)
𝜎𝑚á𝑥 = 176𝑀𝑃𝑎
A partir do raciocínio elaborado anteriormente para o cálculo de tensão
máxima de cisalhamento, concluiu-se que, equação 42:
𝛿𝑚á𝑥 = 16,2
645(43)
𝛿𝑚á𝑥 = 25,11𝑀𝑃𝑎
7.7 DEFINIÇÃO DO MANCAL DE ROLAMENTOS DE ESFERA
7.7.1 Mancal Superior
Conforme descrito no item 5.3, Mancais, existem diversos tipos de
rolamentos no mercado, e cada um possui propriedades e características que o
tornam particularmente apropriado para certas aplicações.
Os rolamentos de esfera são os mais apropriados para o elevador de
motocicletas, por suportarem cargas radiais e axiais, com baixo momento de atrito e
nível de ruído quando em exercício, assim como, baixo custo (BR MANCAIS, 2016).

71
FIGURA 32- ROLAMENTO RÍGIDO DE ESFERAS
FONTE: SKF, 2015, p.175.
Para aplicação do projeto, devido ao custo e baixa manutenção, no mancal
superior foi utilizado o rolamento rígido de uma carreira de esferas.De acordo com o
espaço aplicável ao projeto e o diâmetro do fuso, foi escolhido o seguinte rolamento.
FIGURA 33 - ROLAMENTO 6002
FONTE: SKF, 2015, p. 175.
7.7.2 Mancal inferior
O rolamento propício para a montagem do mancal inferior é o de esferas de
contato angular, o qual possui as pistas do anel interno e do anel externo
deslocadas entre si, na direção do eixo do rolamento. Por isso, é particularmente
adequado para suportar cargas axiais e radiais, simultaneamente - Figura 34.

72
FIGURA 34 - ESQUEMA TEÓRICO DO ROLAMENTO DE CONTATO ANGULAR
FONTE: SKF,2015, p.1.
O rolamento de uma carreira de esferas de contato angular pode suportar
altas cargas axiais em apenas um sentido, e deve ser ajustado de maneira a
comportar sua geometria, conforme a figura 35(SILVA; SANTOS; FERNANDES,
2016).
FIGURA 35 - SENTIDO DE APLICAÇÃO DE FORÇA NO ROLAMENTO DE ESFERAS DE CONTATO ANGULAR
FONTE: SKF, 2015, p. 219.
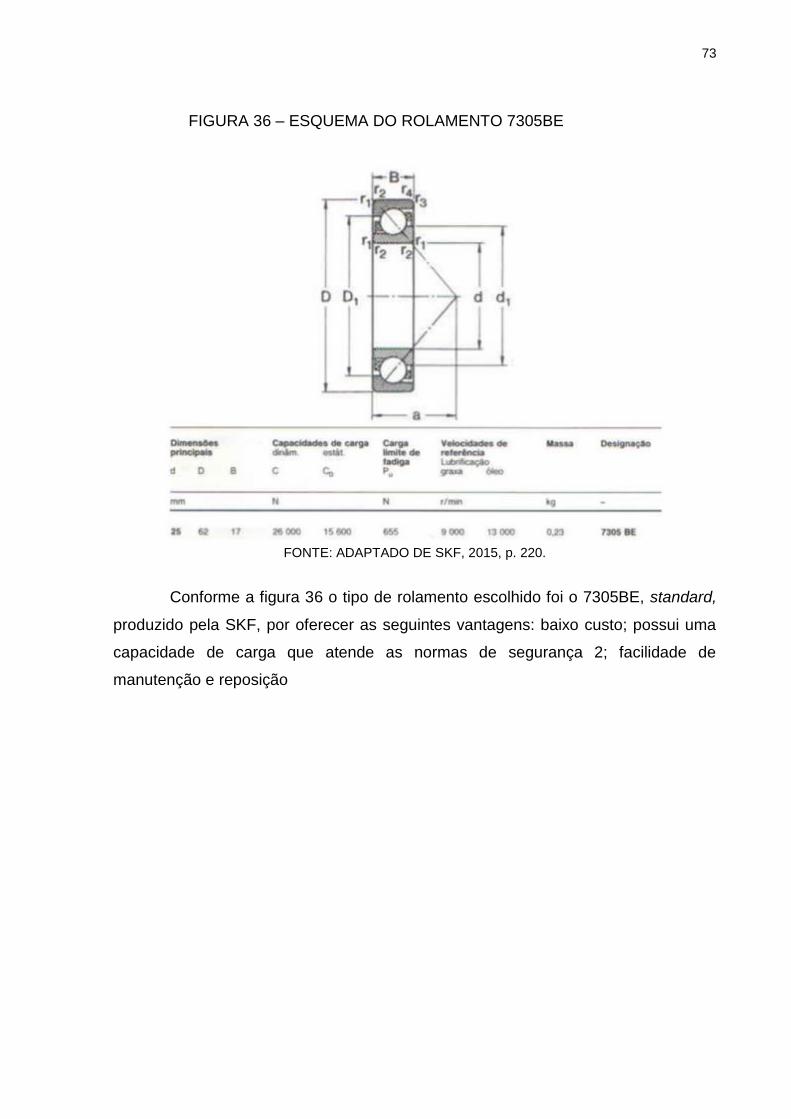
73
FIGURA 36 – ESQUEMA DO ROLAMENTO 7305BE
FONTE: ADAPTADO DE SKF, 2015, p. 220.
Conforme a figura 36 o tipo de rolamento escolhido foi o 7305BE, standard,
produzido pela SKF, por oferecer as seguintes vantagens: baixo custo; possui uma
capacidade de carga que atende as normas de segurança 2; facilidade de
manutenção e reposição
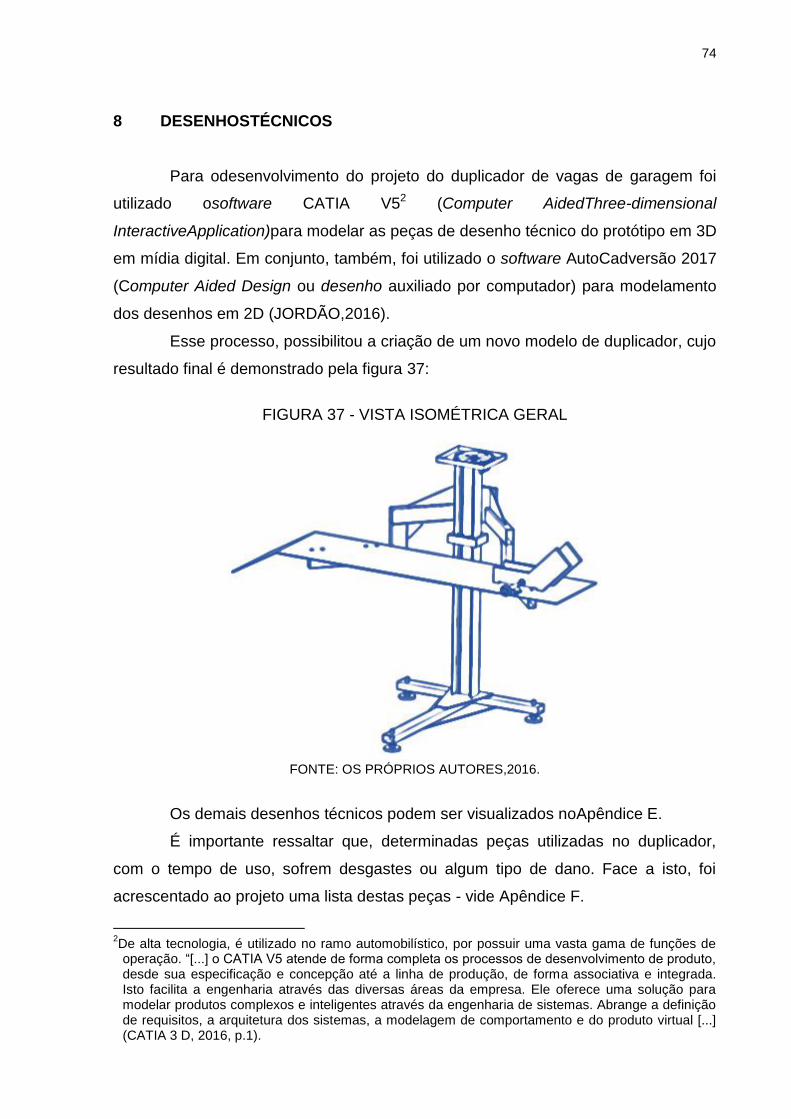
74
8 DESENHOSTÉCNICOS
Para odesenvolvimento do projeto do duplicador de vagas de garagem foi
utilizado osoftware CATIA V52 (Computer AidedThree-dimensional
InteractiveApplication)para modelar as peças de desenho técnico do protótipo em 3D
em mídia digital. Em conjunto, também, foi utilizado o software AutoCadversão 2017
(Computer Aided Design ou desenho auxiliado por computador) para modelamento
dos desenhos em 2D (JORDÃO,2016).
Esse processo, possibilitou a criação de um novo modelo de duplicador, cujo
resultado final é demonstrado pela figura 37:
FIGURA 37 - VISTA ISOMÉTRICA GERAL
FONTE: OS PRÓPRIOS AUTORES,2016.
Os demais desenhos técnicos podem ser visualizados noApêndice E.
É importante ressaltar que, determinadas peças utilizadas no duplicador,
com o tempo de uso, sofrem desgastes ou algum tipo de dano. Face a isto, foi
acrescentado ao projeto uma lista destas peças - vide Apêndice F.
2De alta tecnologia, é utilizado no ramo automobilístico, por possuir uma vasta gama de funções de operação. “[...] o CATIA V5 atende de forma completa os processos de desenvolvimento de produto, desde sua especificação e concepção até a linha de produção, de forma associativa e integrada. Isto facilita a engenharia através das diversas áreas da empresa. Ele oferece uma solução para modelar produtos complexos e inteligentes através da engenharia de sistemas. Abrange a definição de requisitos, a arquitetura dos sistemas, a modelagem de comportamento e do produto virtual [...] (CATIA 3 D, 2016, p.1).
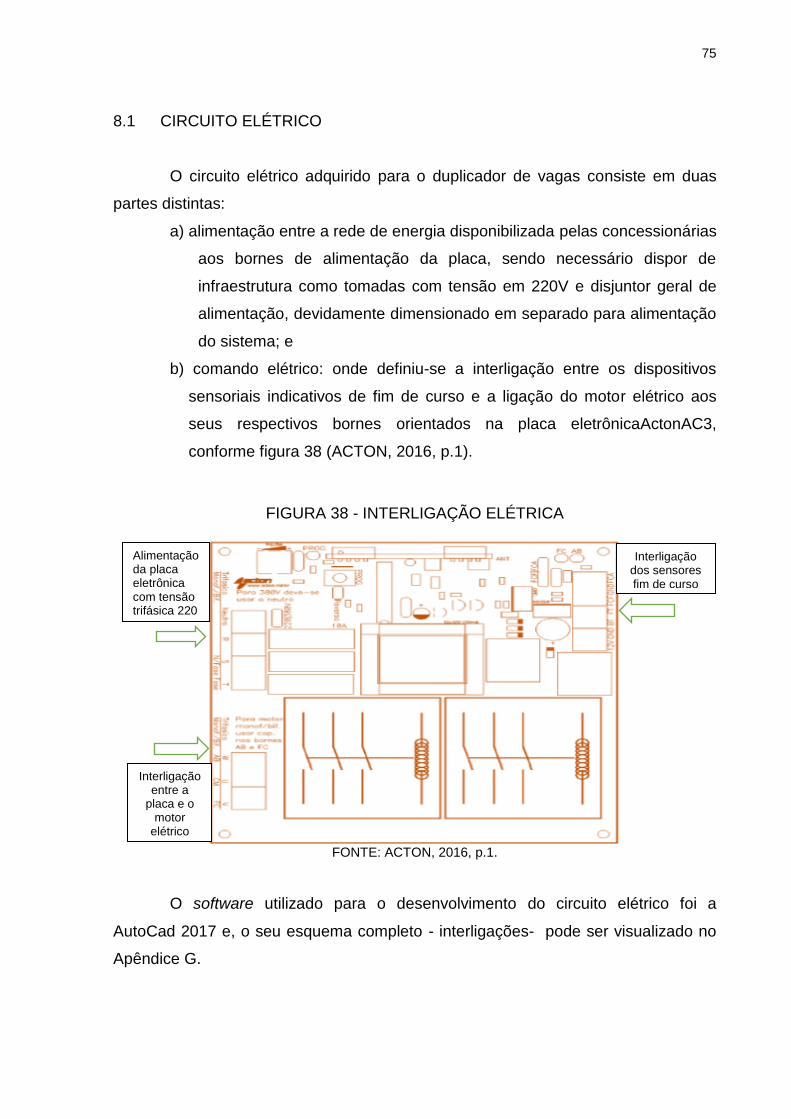
75
8.1 CIRCUITO ELÉTRICO
O circuito elétrico adquirido para o duplicador de vagas consiste em duas
partes distintas:
a) alimentação entre a rede de energia disponibilizada pelas concessionárias
aos bornes de alimentação da placa, sendo necessário dispor de
infraestrutura como tomadas com tensão em 220V e disjuntor geral de
alimentação, devidamente dimensionado em separado para alimentação
do sistema; e
b) comando elétrico: onde definiu-se a interligação entre os dispositivos
sensoriais indicativos de fim de curso e a ligação do motor elétrico aos
seus respectivos bornes orientados na placa eletrônicaActonAC3,
conforme figura 38 (ACTON, 2016, p.1).
FIGURA 38 - INTERLIGAÇÃO ELÉTRICA
FONTE: ACTON, 2016, p.1.
O software utilizado para o desenvolvimento do circuito elétrico foi a
AutoCad 2017 e, o seu esquema completo - interligações- pode ser visualizado no
Apêndice G.
Interligação dos sensores fim de curso
Alimentação da placa eletrônica com tensão trifásica 220
Interligação entre a
placa e o motor
elétrico

76
O acionamento de elevação da base que suporta a moto, se dápor controle
remoto - rádio frequência, conforme aqueles utilizados em portões eletrônicos e/ ou
por meio de um botão de simples acionamento localizado na parte superior da viga.
Os sensores fim de curso são instalados aos pares, neste caso,foram
instalados dois sensores fixos: um na parte superior, e o outro, na inferior da viga,
para limitar o ponto máximo de subida e de descida. Já no conjunto móvel
responsável pela elevação da moto, que é acoplado ao fuso e faz o conjunto se
mover, foiinstalado dois imãs, os quais ao passarem pelos sensores, acionam as
contatoras, e fazem com que o motor pare de girar e, com isso,movimento da base
elevatória para.

77
9 PROTÓTIPO DO DUPLICADOR DE VAGAS
9.1 PRODUÇÃO DO PROTÓTIPO
O dispositivo foi composto por peças torneadas, fresadas e soldadas, figura
39.
FIGURA 39 - PEÇAS OXICORTADAS, TORNEADAS, FRESEADAS E SOLDADAS
FONTE: OS PRÓPRIOS AUTORES, 2016.
Para otimizar a velocidade de sua fabricação as peças que necessitaram de
geometria especial foram cortadas a laser. As demais foram compradas com suas
dimensões próxima da final, o que facilitou a sua montagem.
Todas as etapas do desenvolvimento do dispositivo foram efetivadas aos
finais de semana na empresa AC AUTOMAÇÃO, a qual disponibilizou todo
maquinário para a sua montagem. As etapas iniciais foram:
a) a união pelo meio do processo de soldagem dos aços que formam a base
da estrutura e a fixação da viga I a base;
b) a produção do conjunto elétrico ocorreu em paralelo com a produção do
suporte do mancal e da bucha de sustentação da porca de elevação, os
quais foram usinados em um torno e fresa, sucessivamente;
c) com o conjunto de peças, já fabricado separadamente, foi iniciada a
montagem do conjunto mecânico e o acoplamento do motor ao sistema;
d) para manter a correia sempre tensionada, deve-se fazer uso do sistema
de ajuste por parafuso, localizado atrás da placa de fixação do motor;

78
e) com as primeiras operações do sistema, foram realizados os testes de
medições de corrente e tensão do funcionamento do motor, os ajustes
finos nos sensores fim de curso e na estética do duplicador de vagas.
9.2 PROCESSO DE FABRICAÇÃO
O processo de fabricação foi executado de acordo com as seguintes etapas:
a) a soldagem da base estrutural, onde foram unidos os tubos quadrados às
chapas cortadas a laser à viga I, figura 40.
FIGURA 40 - FABRICAÇÃO DA BASE ESTRUTURAL
FONTE: OS PRÓPRIOS AUTORES, 2016.
b) braços de sustentação: utilizado os tubos quadrados com cortes angulado
em 45 graus e uma chapa oxicortada na medida necessária,figura 41.
FIGURA 41 - FABRICAÇÃO DOS BRAÇOS DE SUSTENTAÇÃO
FONTE: OS PRÓPRIOS AUTORES, 2016.
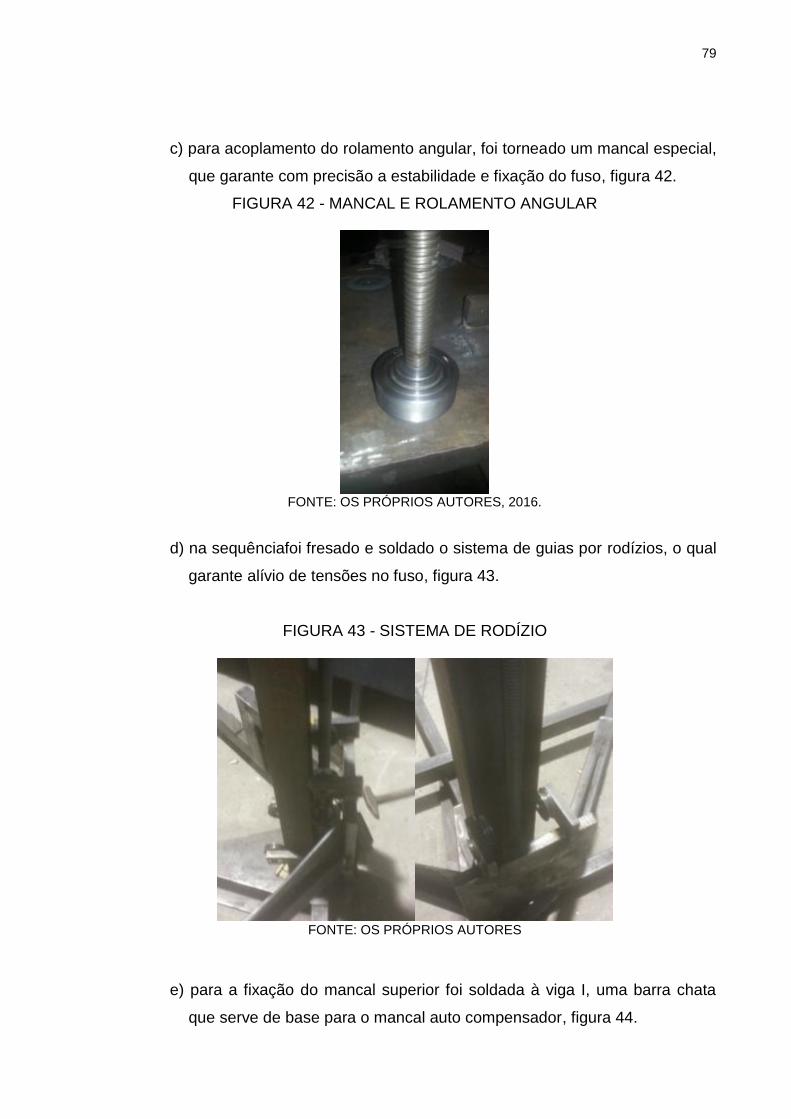
79
c) para acoplamento do rolamento angular, foi torneado um mancal especial,
que garante com precisão a estabilidade e fixação do fuso, figura 42.
FIGURA 42 - MANCAL E ROLAMENTO ANGULAR
FONTE: OS PRÓPRIOS AUTORES, 2016.
d) na sequênciafoi fresado e soldado o sistema de guias por rodízios, o qual
garante alívio de tensões no fuso, figura 43.
FIGURA 43 - SISTEMA DE RODÍZIO
FONTE: OS PRÓPRIOS AUTORES
e) para a fixação do mancal superior foi soldada à viga I, uma barra chata
que serve de base para o mancal auto compensador, figura 44.

80
FIGURA 44- MANCAL AUTOCOMPENSADOR
FONTE: OS PRÓPRIOS AUTORES, 2016.
f) torneamento e chavetamento de um eixo prolongador que liga o fuso TR25
à polia de 325mm.
Em decorrência destes processos a bandeja de sustentação foi posicionada,
onde foram marcados e realizados seus furos de fixação. As dobradiças foram
soldadas para a rampa de acesso da motocicleta.
Para finalização do processo de fabricação o motor foi fixado alinhado com a
polia localizada no topo do fuso.
9.3 INSTALAÇÃO ELÉTRICA
Nessa etapa da instalação elétrica foi realizada a montagem do quadro de
proteção no qual ficou acoplado a placa eletrônica e, também, a furação de fixação
da placa, furação de passagem de cabos e sensores e furação para acoplamento do
botão de acionamento.
Com todas as furações realizadas foi fixada a placa na caixa de proteção,
instalado os passadores de cabos e realizado a interligação dos cabos de
alimentação do sistema, alimentação do motor e a fixação do botão de partida, figura
45.

81
FIGURA 45 - MONTAGEM DO QUADRO ELÉTRICO
FONTE: OS PRÓPRIOS AUTORES, 2016.
Para o protótipo, foi utilizado um motor trifásico 220V de 1,50CV com as
características semelhantes utilizadas para o dimensionamento do motor, e alterado
apenas a alimentação elétrica e a capacidade de torque que foi aumentada de 3,13
N.m do motor de 0,75CV para 6,13 no motor utilizado no protótipo.
Com o conjunto elétrico finalizado, o quadro elétrico foi fixado no topo da viga
I, e efetuada a interligação dos cabos do motor, a alimentação elétrica do sistema
através de tomada steck, a fixação e calibração dos sensores fim de curso.
Com sistema eletromecânico calibrado e a operar, foram testados com o
acionamento pelo controle remoto e pelo botão para análise de funcionamento pelo
meio da coleta de parâmetros técnicos como corrente (i) e tensão (U), figura 46.
FIGURA 46 - QUADRO ELÉTRICO
FONTE: OS PRÓPRIOS AUTORES, 2016.

82
9.4 MODO DE FUNCIONAMENTO
O duplicador de vagas para motocicletas é constituído por duas peças
estruturais principais - base estrutural e braços de sustentação:
a) a base estrutural que recebe e distribuí os esforços aplicados, figura 47:
FIGURA 47 - BASE ESTRUTURAL
FONTE: OS PRÓPRIOS AUTORES, 2016.
b) os braços de sustentação que, por sua vez, são responsáveis pela
movimentação da motocicleta. Com eles, foi possível a duplicação da
vaga de estacionamento, figura 48:
FIGURA 48 - BRAÇOS DE SUSTENTAÇÃO
FONTE: OS PRÓPRIOS AUTORES, 2016.
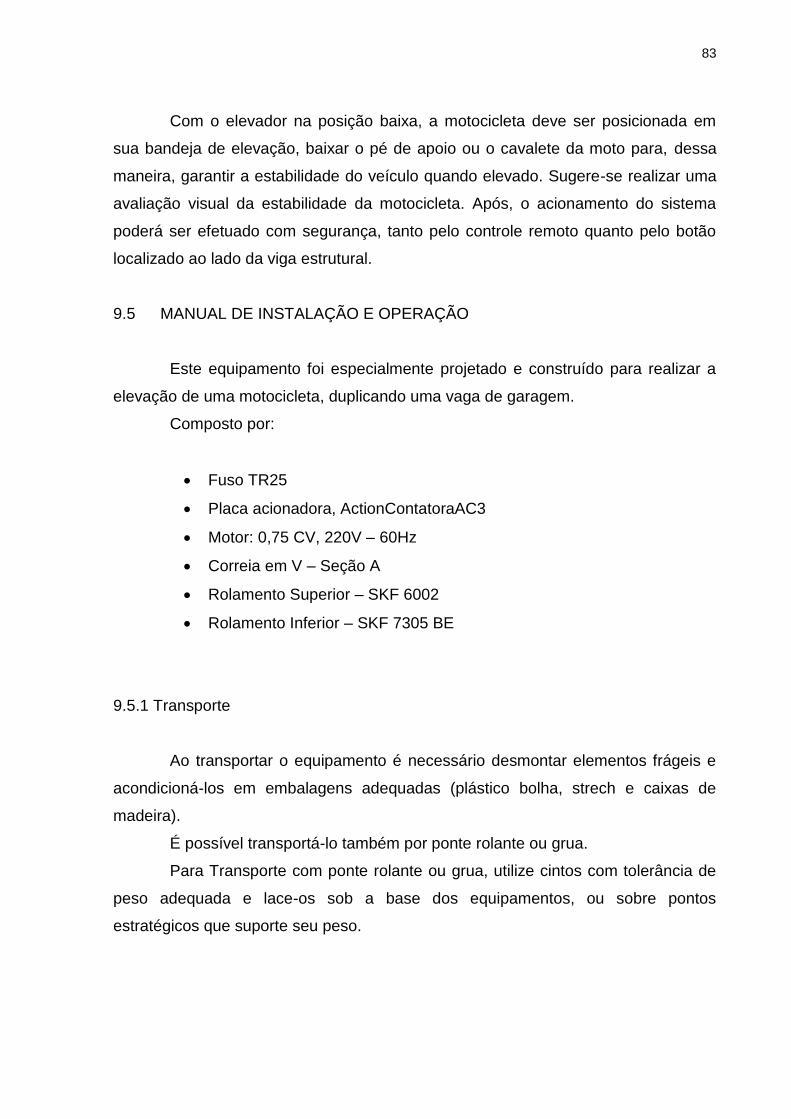
83
Com o elevador na posição baixa, a motocicleta deve ser posicionada em
sua bandeja de elevação, baixar o pé de apoio ou o cavalete da moto para, dessa
maneira, garantir a estabilidade do veículo quando elevado. Sugere-se realizar uma
avaliação visual da estabilidade da motocicleta. Após, o acionamento do sistema
poderá ser efetuado com segurança, tanto pelo controle remoto quanto pelo botão
localizado ao lado da viga estrutural.
9.5 MANUAL DE INSTALAÇÃO E OPERAÇÃO
Este equipamento foi especialmente projetado e construído para realizar a
elevação de uma motocicleta, duplicando uma vaga de garagem.
Composto por:
Fuso TR25
Placa acionadora, ActionContatoraAC3
Motor: 0,75 CV, 220V – 60Hz
Correia em V – Seção A
Rolamento Superior – SKF 6002
Rolamento Inferior – SKF 7305 BE
9.5.1 Transporte
Ao transportar o equipamento é necessário desmontar elementos frágeis e
acondicioná-los em embalagens adequadas (plástico bolha, strech e caixas de
madeira).
É possível transportá-lo também por ponte rolante ou grua.
Para Transporte com ponte rolante ou grua, utilize cintos com tolerância de
peso adequada e lace-os sob a base dos equipamentos, ou sobre pontos
estratégicos que suporte seu peso.

84
9.5.2 Instalação
Após o transporte será realizada a instalação do equipamento. Para isso,
devem-se posicionar todos os equipamentos verificando o espaço adequado para a
instalação correta.
Com o espaço necessário para a instalação, primeiramente deve ser
realizada a montagem mecânica dos equipamentos que foram desmontados para o
transporte.
O serviço de instalação e nivelamento do equipamento deve ser executado
por técnicos especializados.
Ao instalar o equipamento é necessário verificar os seguintes itens:
Área livre suficiente;
Nivelar corretamente o equipamento;
Certificar que a temperatura do ambiente está de acordo com a especificação
técnica da máquina (máx. 35°C).
9.5.3 Operação
Providenciar fonte de energia 220V
Ligar o dispositivo
Realizar uma conferencia visual da integridade física dos componentes do
elevador.
Certificar-se que a bandeja de sustentação esteja na posição baixa
Caso não esteja deve-se acionar o dispositivo abaixando a bandeja de
sustentação.
Posicionar a motocicleta sobre a bandeja de sustentação.
Estender pé de apoio ou cavalete para manter a motocicleta estática.
Conferir a real estabilidade da motocicleta.
Acionar comando de subida via controle remoto ou via botão, localizado na caixa
de comando ao lado da viga estrutural.

85
Caso necessário suspender o movimento e retornar a motocicleta para
baixo, basta acionar a qualquer momento o controle remoto ou o botão,
localizado na caixa de comando ao lado da viga estrutural.
Após elevação total, o movimento sessará por meio do sinal de um sensor
magnético fixado à viga de sustentação.
Com o elevador na posição alta é possível duplicar a vaga de garagem
posicionando o carro com o capô sob a motocicleta.
9.5.4 Manutenção
Todos os serviços de manutenção na máquina devem ser realizados por
profissionais competentes e habilitados em tal função. A manutenção com pessoas
desqualificadas pode resultar em graves acidentes ou em vida útil da máquina
reduzida devido a ações incorretas.
Não se deve realizar, em hipótese nenhuma, manutenção com o
equipamento energizado, ou com o mesmo trabalhando.
9.5.5 Limpeza
A limpeza da máquina é fundamental para o bom funcionamento, e para
segurança. A limpeza efetuada corretamente reduz consideravelmente o risco de
acidentes. Deve-se mante o fuso devidamente lubrificado.
9.5.6 Utilização Correta
Para aumentar a vida útil, operar a máquina apenas em perfeitas condições.
Para isso deve-se realizar a manutenção e conservação de acordo com as
instruções.
O duplicador de vagas de garagem deve ser utilizado exclusivamente para
motocicletas com distância entre eixos de 1300 mm e carros com altura do capô de
1100 mm.

86
Não realize manutenções corretivas em nenhum equipamento periférico da
máquina sem antes consultar o fabricante. Todos os equipamentos periféricos têm
garantia, que pode estar em vigência.
Recomendamos que todos os equipamentos periféricos, quando danificados
sejam enviados ao seu fabricante para devido reparo especializado.
9.5.7 Garantia
Este produto está garantido pelo período de 1(um) ano, contados a partir da data
de entrega.
1º. TERMOS DE GARANTIA - Estão cobertos pela presente garantia:
Eventuais defeitos de funcionamento mecânico.
Eventuais defeitos de materiais empregados.
2º. EXTINÇÃO DA GARANTIA
Pelo término do prazo de validade.
Pela introdução de modificações / alterações.
Assistência técnica prestada por pessoas não autorizadas.
Pela suspensão ou atraso nos pagamentos das prestações vencidas ou outros
débitos.
3º. EXCLUSÃO DA GARANTIA - Não estão cobertos pela presente garantia:
Peças e pertences cuja vida útil seja, por sua própria característica, inferior ao
prazo de garantia.
Danos causados pela falta de manutenção, limpeza e lubrificação.
Avarias resultantes da imperícia do operador, uso indevido e acidentes de
qualquer natureza.
Defeitos ou danos oriundos da prolongada falta de utilização.
O não cumprimento das recomendações descritas no manual de operação.
9.6 APLICAÇÃO DAS NORMAS REGULAMENTADORAS
Conforme apontado pelos estudos levantados na casa da qualidade, além de
baixo custo o produto deve também atender as normas regulamentadoras de
segurança, para que possa servir com excelência as necessidades dos clientes.
Com o produto atendendo as normas da seguinte maneira:
87
NR10 - SEGURANÇA EM INSTALAÇÕES E SERVIÇOS EM ELETRICIDADE
- Instalações elétricas isoladas com painel de proteção;
- Cabos elétricos devidamente isolados;
- Dispositivo de proteção tipo fusível na placa eletrônica;
- Dispor de infraestrutura com dispositivos de proteção elétrica como supressores
de surto;
- Tomada de ligação elétrica do tipo steck, para garantir a integridade física do
usuário.
NR11 – MOVIMENTAÇÃO DE CARGAS:
- Sistema de fixação da motocicleta, estabilizando o centro de massa da carga
elevada;
-Sinalização visual e sonora durante a operação do equipamento;
-Bandeja de sustentação pintada na cor laranja, especificada para partes moveis
e perigosas de maquinas e equipamentos.
NR12 – OPERAÇÃO DE MAQUINAS:
- Isolamento físico das partes com movimentos rotativos, sendo elas: polias, fuso
e motor;
- Batentes mecânicos de fim de curso, garantindo assim a integridade estrutural
do equipamento e limitando o curso de avanço dos braços de elevação;
- Acesso ergonômico ao botão de acionamento localizado na lateral da viga
estrutural.

88
10 TESTES E ENSAIOS
Para a comprovação dos cálculos apresentados, optou-se por fazer o ensaio
de compressão no fuso de elevação, ponto critico do sistema o que direcionou as
atenções para analise prática através de um teste de compressão, submetendo um
corpo de prova retirado do próprio fuso do protótipo e analisado se as tensões
admissíveis calculadas em projeto correspondem às tensões aplicadas pelo
dispositivo em funcionamento e assim garantir a segurança e funcionalidade do
equipamento.
O ensaio de compressão foi realizado para o aço do fuso, utilizando a
máquina EMIC no núcleo de engenharia mecânica da Universidade Tuiuti do
Paraná.
De início foi realizado os procedimentos para o preparo da amostra, dentre os
procedimentos estão:
Corte do material;
Desbaste;
Lixamento;
Polimento.
Depois de feito o preparo da amostra, iniciou-se os processos para o ensaio,
sendo medido manualmente através de paquímetro digital os valores de
deformação, pelo fato da máquina estar descalibrada. Na figura 49, mostra-se o
comprimento inicial do corpo de prova que será analisado.
FIGURA 49 – MEDIDA DO COMPRIMENTO DO CORPO DE PROVA
FONTE: OS PRÓPRIOS AUTORES, 2016.
Dando sequência, foi mensurado o diâmetro conforme figura 50.

89
FIGURA 50 - DIÂMETRO DO CORPO DE PROVA
FONTE: OS PRÓPRIOS AUTORES, 2016.
Depois de realizado todas as medidas, o corpo de prova foi submetido a uma
pré-carga de acordo com figura 51, foi medido para o início do processo de
compressão do material.
FIGURA 51 - COMPRIMENTO APÓS A PRÉ-CARGA
FONTE: OS PRÓPRIOS AUTORES, 2016.
Após a pré-carga o ensaio foi realizado, de acordo com a figura 52,
mostrando-se o valor encontrado de carga máxima do corpo de prova.

90
FIGURA 52 - RESULTADOS DA CARGA MÁXIMA DE COMPRESSÃO
FONTE: OS PRÓPRIOS AUTORES, 2016.
Por meio do gráfico apresentados na figura 53, observa-se que o valor da
força de compressão foi de aproximadamente 71.900N, a deformação foi mensurado
através do paquímetro digital conforme figura 51.
FIGURA 53– FORÇA DE COMPRESSÃO PELA DEFORMAÇÃO
FONTE: OS PRÓPRIOS AUTORES, 2016.
Depois do ensaio concluído, mensurou-se o valor final da deformação de
acordo com figura 54, para o cálculo da tensão de compressão e deformação
específica.
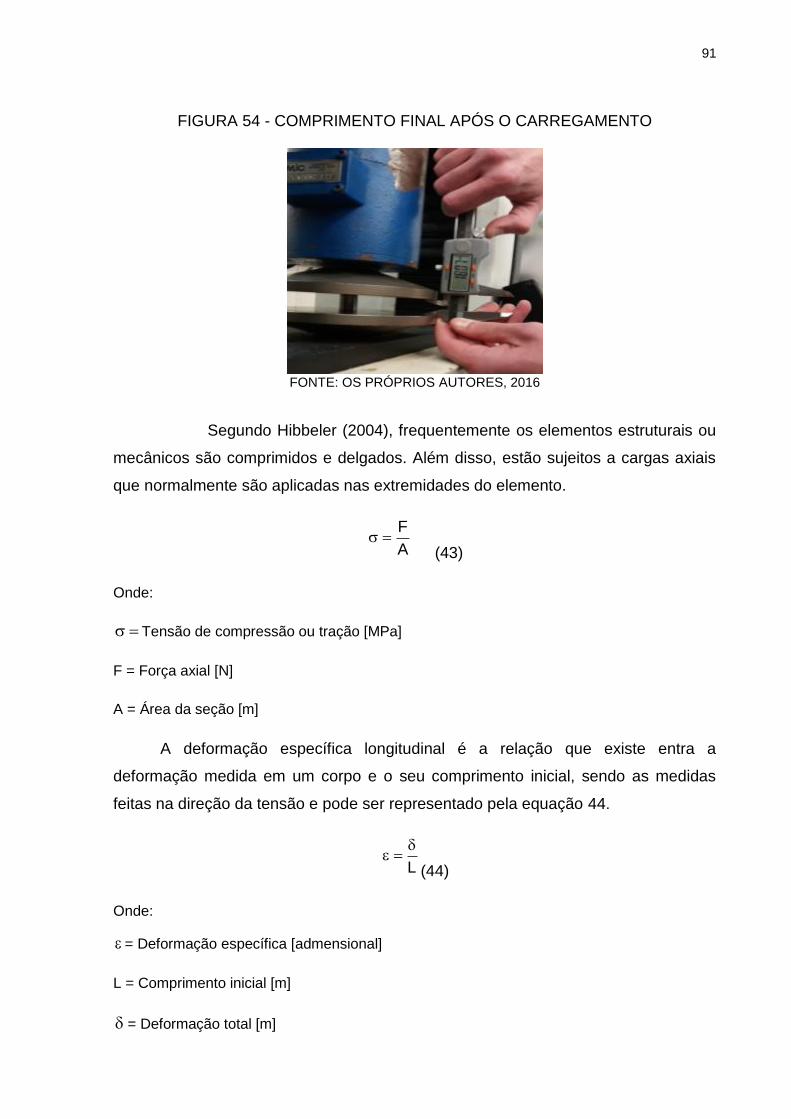
91
FIGURA 54 - COMPRIMENTO FINAL APÓS O CARREGAMENTO
FONTE: OS PRÓPRIOS AUTORES, 2016
Segundo Hibbeler (2004), frequentemente os elementos estruturais ou
mecânicos são comprimidos e delgados. Além disso, estão sujeitos a cargas axiais
que normalmente são aplicadas nas extremidades do elemento.
F
A
(43)
Onde:
Tensão de compressão ou tração [MPa]
F = Força axial [N]
A = Área da seção [m]
A deformação específica longitudinal é a relação que existe entra a
deformação medida em um corpo e o seu comprimento inicial, sendo as medidas
feitas na direção da tensão e pode ser representado pela equação 44.
L
(44)
Onde:
= Deformação específica [admensional]
L = Comprimento inicial [m]
= Deformação total [m]

92
10.1 CÁLCULOS DA TENSÃO DE ESCOAMENTO E DEFORMAÇÃO ESPECÍFICA
Com a carga máxima encontrada no ensaio calcula-se a área da seção
conforme equação 45, para obter os valores da tensão máxima de escoamento.
𝐴𝑆𝐸ÇÃ𝑂 =𝜋.(𝐷2)
4(45)
Em que:
seçãoA = Área da seção transversal do corpo de prova [mm].
Dados:
Diâmetro: 16,32 mm.
Força máxima aplicada: 72.000N
𝐴𝑆𝐸ÇÃ𝑂 =𝜋. (16,322)
4
seçãoA 209,2 mm²
Com o valor da área é calculado o valor da Tensão de Proporcionalidade (σP)
máxima, considerado o limite de escoamento do material do fuso:
𝜎𝑃 =71.900
209,2
343,7 MPa.
A deformação específica (ε) é calculada através da equação 44.
휀 =(18,37 − 18,07)
18,37
ε = 0,0163 [adimensional]
10.2 CONCLUSÕES DO ENSAIO
De acordo com o fornecedor do fuso, o valor de resistência mecânica é 460
MPa. Os cálculos teóricos foram realizados para o valor mínimo de limite de
escoamento, considerando não haver tratamento térmico ou encruamento a frio, ou

93
seja, 60% da resistência mecânica. Desta forma, o valor limite da tensão de
proporcionalidade utilizado para cálculos foi de 276 MPa (Capítulo 7.1).
No ensaio foi observado que o limite de escoamento do material é de 343,7
MPa.
Comparando o limite de escoamento utilizado pelo fornecedor do fuso com o
valor encontrado no ensaio, a relação entre os dois se da pela equação 46.
ensaio tabelado
ensaio
Rel
(46)
Onde:
Rel = Relação do Limite de Escoamento [%].
ensaio = Tensão de escoamento encontrado pelo ensaio [MPa].
tabelado = Tensão de escoamento tabelado [MPa].
𝑅𝑒𝑙 =343,7 − 276
276
Rel = 0,245
Rel=0,245 * 100%
Rel = 24,5%
A relação do limite de escoamento está 24,5% acima do mínimo indicado por
referência.
Conclui-se através do ensaio realizado que o valor obtido para o limite de
escoamento está acima do valor em 24,5% utilizado para os cálculos teóricos e
coeficiente de segurança adotado, garantindo a funcionalidade adequada do
protótipo, mesmo que para o material fornecido não seja realizado mecanismos de
endurecimento.
94
11 CONCLUSÃO
O presente estudo trouxe o conhecimento sobre a Engenharia Mecânica, na
forma de como é compreendida hoje: além do sólido conhecimento científico-
tecnológico, oferece uma formação generalista, crítica, criativa, humanista, reflexiva
e ética,para que possa desenvolver novas tecnologias integradas às políticas de
desenvolvimento urbano, social, ambientais, culturais da sociedade em que esteja
inserida.
Entre as principais contribuições, na área urbana, destacamos a
necessidade de os espaços prediais serem otimizados, com baixo custo e
excelentes benefícios.
O duplicador de vagas de garagens mostrou-se uma solução viável. Para tal,
é necessário conhecer determinados conteúdos tais como, projetos mecânicos,
resistência dos materiais, elementos de máquinas e processos de fabricação.
O projeto foi idealizado, analisado, modelado e submetido a testes práticos e
técnicos que resultaram em um produto otimizado, de custo inferior ao dos
equipamentos encontrados no mercado atual.
O resultado satisfatório do projeto deve-se a um estudo de mercado, aliado a
uma pesquisa de possíveis clientes que nortearam e proporcionaram a viabilidade
do produto no seguimento de estacionamentos, conduzidos por conhecimentos
técnicos, obtendo dados sistematizados e otimizados para advento do produto
comercialmente.
Ao final desse estudo, pôde-se verificar que a utilização doduplicador
contribuí para a racionalidade de recursos, é eficaz a todo tipo de empreendimento e
tamanho, bem como sua aplicação deverá ser utilizada de acordo com a
necessidade e situações que envolvem pessoas.
Os conhecimentos adquiridos no presente trabalho nos trouxeram valioso
aprimoramento para o nosso exercício profissional.
Sugere-se para as próximas pesquisas, estudos referentes a importância do
laboratório para modelar e simular a vivência real do futuro engenheiro mecânico
entre a ciência e tecnologia o que, com isso, possibilita uma vida melhor a todas as
pessoas.

95
Durante o processo de desenvolvimento do projeto e da construção do
duplicador de vagas, houve algumas dificuldades as quais foram contornadas
colocando-se em prática os cinco anos de formação acadêmica do curso de
engenharia mecânica e com apoio de alguns colaboradores da área de projetos
mecânicos, sempre na busca de agregar conhecimentos.
Entre as dificuldades encontradas, pode-se citar a seleção do motor elétrico,
porém, solucionada a partir da orientação de profissionais capacitados que
direcionaram a forma mais correta de seleção do motor.
Na seleção das polias que compõem o sistema de redução de velocidade do
fuso, houve dificuldades para encontrar uma polia no tamanho de 32mm
padronizada, que fosse comercial, e sem conseguir, partiu-se então para a proposta
de usinar uma polia com a dimensão desejada.
Com os processos de usinagem, houve dificuldades práticas quanto ao
manuseio do ferramental (solda, torno e fresa) o que sugeriu solicitar apoio técnico
de um operador de máquinas para operação do maquinário e apoio do processo de
montagem.
Por fim, as dificuldades foram tratadas como oportunidades de aprendizagem
e melhorias, fazendo com que as soluções dos problemas fossem criadas,
analisadas e implementadas.
Durante o desenvolvimento do projeto, foram observadas algumas
oportunidades de melhorias no duplicador, ao que se segue.
O sistema elétrico pode ser aperfeiçoado ao ser aplicado um inversor de
frequência e, com isso, garantir economia no consumo de energia, bem como,
prolongar a vida útil do equipamento. Porém, não foi aplicado neste protótipo devido
ao custo elevado de aquisição.
O sistema de redução de velocidade pode ser substituído por correias de
tração, uma tecnologia mais recente que garante mais eficiência no acoplamento
entre polias.
O dimensionamento da estrutura metálica pode ser revisto, a especificação
dos tubos que forma a base de sustentação da moto, ficando superdimensionados
96
para os esforções produzidos pela moto e pelo peso da estrutura, optando assim por
tentar desenvolver um material que seja mais leve e que traga redução de custo ao
projeto final.
A padronização das peças usinadas pode ser um diferencial na questão
tempo. Por não serem peças produzidas em série, houve um gasto maior de tempo
para elaboração e confecção das mesmas, o que encareceu o preço do produto,
porém, uma boa análise de tempos e a padronização das peças trouxe um ganho
significativo quanto ao custo final do equipamento.
A fabricação de gabaritos para um processo de produção contínuo também
caberia como melhorias, talvez não para o produto, mas sim, para o processo que
impacta -em muito - no valor final do produto e em sua qualidade.

97
REFERÊNCIAS ABNT. NR 14712. Disponível em: <www.target.com.br/produtos/normas-tecnicas/30358/nbr14712-elevadores-eletricos-e-hidraulicos-elevadores-de-carga-monta-cargas-e-elevadores-de-maca-requisitos-de-seguranca-para-construcao-e-instalacao>. Acesso em: 11 abr. 2016. ACTON. Manual de instalação do circuito elétrico AC3. Disponível em: <http://www.acton.ind.br/linha_ac3.php>. Acesso em 29 mar. 2016. ______. Placa AC3. Figura 7. Disponível em: <http://www.acton.ind.br/linha_ac3.php>. Acesso em 29 mar. 2016. ALMEIDA, Francisco.José. Sistemas Mecânicos de Elementos de Máquinas2012. Disponível em: http://docslide.com.br/documents/mancais-e-buchas. Acesso em: 20 mar. 2016. ANDRADE JÚNIOR, Irajá Gaspar. Tecnologia de Rolamento.São Paulo: Associação Brasileira Técnica de Celulose e Papel, 1994, 32 p. ANTUNES, Izildo; FREIRE; M.A.C. Elementos de Máquinas. São Paulo. Editora Érica,2000. ARRIVABENE, Vladimir. Resistência dos Materiais.3. ed. São Paulo: Pearson Markron Books, 1994. A.T.I. BRASIL.Dimensão de Diâmetro Passo e Comprimento.Catálogo. Disponível em: <www.atibrasil.com.br. > Acesso em: 29 mar. 2015. BRASIL. Lei 12.587/2012. Institui as diretrizes da Política Nacional de Mobilidade Urbana; Disponível em:<http://www.planalto.gov.br/ccivil_03/_ato2011-2014/2012/lei/l12587.htm>. Acesso em: 25 fev. 2016. ______. Johnston, E Russel. Resistência dos Materiais. Flambagem. 3. ed. São Paulo: Pearson Markron Books, 1995. BODY Jr., Harper W., WESTFALL, Ralph. Pesquisa Mercadológica.Texto e Casos.4.ed. Rio de Janeiro: Fundação Getúlio Vargas, 1979. BORGES, M.M. Soldagem. Disponível em: <http://mmborges.com/processos/Uniao/uniao%20termica%20-%20soldagem.htm>. Acesso em: 6 abr. 2015. BUDYNAS, R.G.; NISBETT, J.N. Elementos de Máquinas de Shigley.Projeto de Engenharia Mecânica. 8.ed.Bookman e Mc Graw Hill: Porto Alegre, Brasil, 2011. BR MANCAIS. Conceito de mancal. Disponível em: http://www.brm.com.br/produtos/ferro-fundido-nodular/m> Acesso em: 10 abr. 2016. CATIA - 3D. CATIA V5.Disponível em: <catia3d.com> Acesso em: 12 abr. 2016.
98
CHENG, LinChih; MELO FILHO, Leonel Del Rey de Melo. QFD- planejamento de qualidade do produto durante seu desenvolvimento- caso em uma empresa de materiais. 1995. DEL TORO, Vicent. Fundamentos de Máquinas Elétricas. Rio de Janeiro: LTC,2009. DENATRAN. Departamento Nacional de Trânsito. Trânsito. Disponível em:<https://www.google.com.br/?gws_rd=ssl#q=denatran.serpro.gov.br>. Acesso em: 28.fev.2015. DUTRA, Fábio. Você sabe a diferença entre logotipo, símbolo, logomarca e marca? Disponível em <http://www.fabiodutra.com.br/voce-sabe-a-diferenca-entre-logotipo-simbolo-logomarca-e-marca/>. Acesso em: 28 fev. 2016. EDAKI.Elevador automotivo. Disponível em: <http://www.edaki.com.br/rio-do-sul-sc/elevador-automotivo-he-4500-hulk-id-22337>. Acesso em: 25 maio 2015. ENGIOBRA.Momento Inércia. Disponível em: <http://engiobra.com/calculadoras/momento-inercia/circulo/>. Acesso em: 29 mar. 2016. EXAME. Vagas de garagem podem valorizar apartamentos em mais de 20%. Revista Exame.com. Entrevista com Schneider, do Secovi Rio, em 19 de março de 2015. Disponível em:<http://exame.abril.com.br/seu-dinheiro/noticias/vagas-de-garagem-podem-valorizar-apartamentos-em-mais-de-20>. Acesso em: 28 fev. 2016. FORTES, Cleber; VAZ, Claudio Turani. Mig/Mag. 2005,68 p. ESAB. Disponível em: http://www.esab.com.br/br/pt/education/apostilas/upload/1901104rev0_apostilasoldagemmigmag_low.pdf>. Acesso em: 6 abr. 2016. GERDAL AÇO MINAS.Marcas de equipamentos. Disponível em:<https://www.gerdau.com/br/pt>. Acesso em: 5 mar. 2016. GIL, Antônio Carlos. Como Elaborar Projetos de Pesquisa.3 ed. São Paulo: Atlas, 1991. GOODYEAR. Correia em ‘V’. Disponível em: <http://www.rolimao.com.br/manutencao/Catalogo-Correias-Goodyear.pdf>. Acesso em: 29 mar. 2016. GORDO, Nívia; FERREIRA, Joel. Mecânica: Elementos de Máquinas. São Paulo, 2012, 414p. Apostila Telecurso 2000. FIES; CIESP;SESI;SENAI;Irs. GHOUBAR, Khaled. A Respeito das Matrizes de Desempenho - Performance- Decisão.Disponível em: <http://www.usp.br/fau/cursos/graduacao/arq_urbanismo/disciplinas/aut0583/2o._Semestre_de_2009/06._Aula_24_Setembro/Matrizes_de_de_Decisao.pdf> 2009, 9p. Acesso em: 29 de fev.2016.
99
GLOBO ECOLOGIA. Aumentodo número de carros.Disponível em:<http://redeglobo.globo.com/globoecologia/noticia/2013/06/crescimento-no-numero-de-carros-e-semelhante-ao-de-onibus-no-brasil.html> .Acesso em: 20 mar. 2016. HALLIDAY, David: RESNICK, Robert; Walker, Jearl. Fundamentos de Física - Eletromagnetismos. 6.ed. Rio de Janeiro: LTC, 2003. HIBBELER, R. C. Resistência dos Materiais. 7.ed. São Paulo: Pearson Prentice Hall, 2010. JORDÃO, Fabio Roberto Machado. AUTOCAD 2017. Disponível em:<http://www.baixaki.com.br/download/autocad.htm>. Acesso em: 113 abr. 2016. JUNIVALL, Robert C. Projetos de Componentes de Máquina. 4. ed. Rio de Janeiro: Atlas S.A., 2008. KTECS. Duplicador de vagas. Disponível em: <http://www.ktecs.com.br/#!k-park-202/c1jcu>. Acesso em: 2 mar. 2015. LEIBFRIED, KETHLEEN, H. J. Benchmarking: Uma Orientação Aplicada. 3.ed. Rio de Janeiro: Campus, 1994. MADEIRA. UFPR.Flambagem.Disponível em:<http://www.madeira.ufpr.br/dvissotto/resmatII/Flambagem.pdf>. Acesso em: 29 mar. 2105. MEGALUX. Duplicador de vaga. Fig.: 1. Disponível em:<https://www.logismarket.ind.br/croacia-movimentacao-e-elevacao-de-cargas/duplicador-de-vaga-cromo/4036172263-4345547515-p.html>. Acesso em: 18 mar. 2015. MALHOTRA, Naresh K. Pesquisa de Marketing: Uma Orientação Aplicada.3 ed. Rio Grande do Sul: Bookman, 2001. MARCO, F. Elementos de Máquinas II - Correias (2013). Disponível em: <http://www.ebah.com.br/content/ABAAAFOU0AD/correias-2?part=8>. Acesso em: 29 mar.2016. METALTEX: Chave fim de curso. Disponível em: <http://www.metaltex.com.br/sub-categorias/chaves-fim-de-curso>. Acesso em: 5 abr. 2015. MELCONIAN, Sarkis. Elementos da Máquina. 9.ed. Editora: Érica, 2009. NILSSON, James W; RIEDEL, Susan A. Circuitos Elétricos. 8 ed. São Paulo: Person Prentice Hall, 2008. NORTON, Robert L. Projeto de Máquinas - Uma Abordagem Integrada. 2.ed. São Paulo: Armed, 2000.

100
PEREIRA, Marco Antônio. QFD - Conceitos Iniciais e a Casa da Qualidade.Disponível em: <http://www.marco.eng.br/qualidade/aulas/aula07-qfd.pdf>. Acesso em: 29 fev.2016. PINTO, RochellySirremes; FONTENELLE, Maria ArideniseMacena. Desdobramento da Função Qualidade - QDF no Processo de Desenvolvimento de Produtos: uma aplicação prática. Disponível em: <http://www.abepro.org.br/biblioteca/enegep2013_TN_STP_181_033_22774.pdf>. Acesso em: 28 fev. 2015. PRINCÍPIO DE CONSERVAÇÃO DO MOVIMENTO ANGULAR. Disponível em: <http://coral.ufsm.br/gef/Rotacoes/rotacoes03>. Acesso em: 29 mar. 2016. SECRETARIA DE EDUCAÇÃO MÉDIA E TECNOLÓGICA. Educação Profissional:Referenciais Curriculares Nacionais da Educação Profissionalde Nível Técnico.2000, 26 p. Disponível em:<http://portal.mec.gov.br/setec/arquivos/pdf/constciv.pdf>. Acesso em: 29 fev. 2016. SILVA, Débora Ariana Correa da. SANTOS, Érika Barbosa dos; FERNANDES, Ulysses de Barros.Conceitos essenciais sobre mancais de rolamento e de deslizamento. Disponível em:<http://fatecgarca.edu.br/revista/volume2/artigo_8_volume_2.pdf>. Acesso em: 10 abr. 2015. SHIGLEY, Joseph E.; MISCHKE, Charles R.; BUDYNAS, Richard G. Projeto de Engenharia Mecânica. 7.ed. Porto Alegre: Bookman, 2005. SKF. Rolamento de esfera do contato angular. Disponível em: <http://www.skf.com/br/index.html>. Acesso em: 29 abr. 2016 ______. Rolamento rígido de esfera. Disponível em: < http://www.skf.com/br/products/product-tables/index.html>. Acesso em:06 abr. 2015. SPENDOLINI, M. J. Benchmarking.Tradução de: ROQUE, Kátia Aparecida. Roque, São Paulo, Makron Books, 1993. TAHARA,Sayuri. FMEA(FailureModeandEffectAnalysis).Disponível em: <http://www.portaldeconhecimentos.org.br/index.php/por/Conteudo/FMEA-Failure-Mode-and-Effect-Analysis>. Acesso em 03 jun. 2015. THOMPSON LINEAR MOTION. Parafuso de avanço com roscas especiais. Figura 12. Disponível em: <http://www.thomsonlinear.com/website/ptg/ptg/products/ball_screws_and_lead_screws/lead_screws.php>. Acesso em: 13 abr. 2016. UNIVERSIDADE FEDERAL DE SANTA MARIA. Teorema dos Eixos Paralelos. 2016, 3p. Disponível em:<http://coral.ufsm.br/gef/Rotacoes/rotacoes09.pdf>. Acesso em: 11 abr. 2016.

101
VAZ, Frederico S.O. Máquinas Elétrica. Florianópolis: SENAI, 2010.

102
ANEXO A PROPRIEDADE DOS PERFIS DE AÇO LAMINADO
FONTE: JUAN, 2016, p. 54.

103
APÊNDICE A QUESTIONÁRIO APLICADO A PESQUISA DE MERCADO
FONTE: OS PRÓPRIOS AUTORES, 2016.
Nome: Data:
SIM NÃO Outros
até R$100 até R$ 300 acima de R$300
pouco médio muito importante
( ) Segurança
( ) Estética
( ) Emissão Sonora
( ) Facilidade de Operação
( ) Facilidade na Manutenção
( ) Instalação
( ) Transporte
( ) Custo de Aquisição
( ) Custo de Manutenção
( ) Durabilidade
( ) Reposição de Peças
( ) Prazo de Entrega
( ) Outros:
( ) Outros:
( ) Outros:
4. Pouco Necessário
5. Dispensável
_______________________________________________________
_______________________________________________________
_______________________________________________________
PESQUISA DE MERCADO
1. Indispensável
2. Necessário
4- Em média qual é seu gasto mensal com estacionamentos?
5- Qual é o grau de importancia no quesito estacionamento
para seu veículo?
2- Você possui vagas suficientes para seus veículos?
3- Você utiliza com frequencia estacionamentos privados?
O formulário a seguir trata de uma pesquisa de mercado , a qual servirá como base de dados para
tomada de decisões, e criação de parametros para o Trabalho de Conclusão de Curso I, no curso de
engenharia mecânica da Universidade Tuiuti do Paraná.
1- Você possui mais de uma veículo?
3. Regular
6- Já ouviu falar em duplicadores de vagas?
7- Conforme escala de importancia abaixo que atributos são indispensáveis, e quais são
dispensáveis em um duplicador de vagas de garagem.
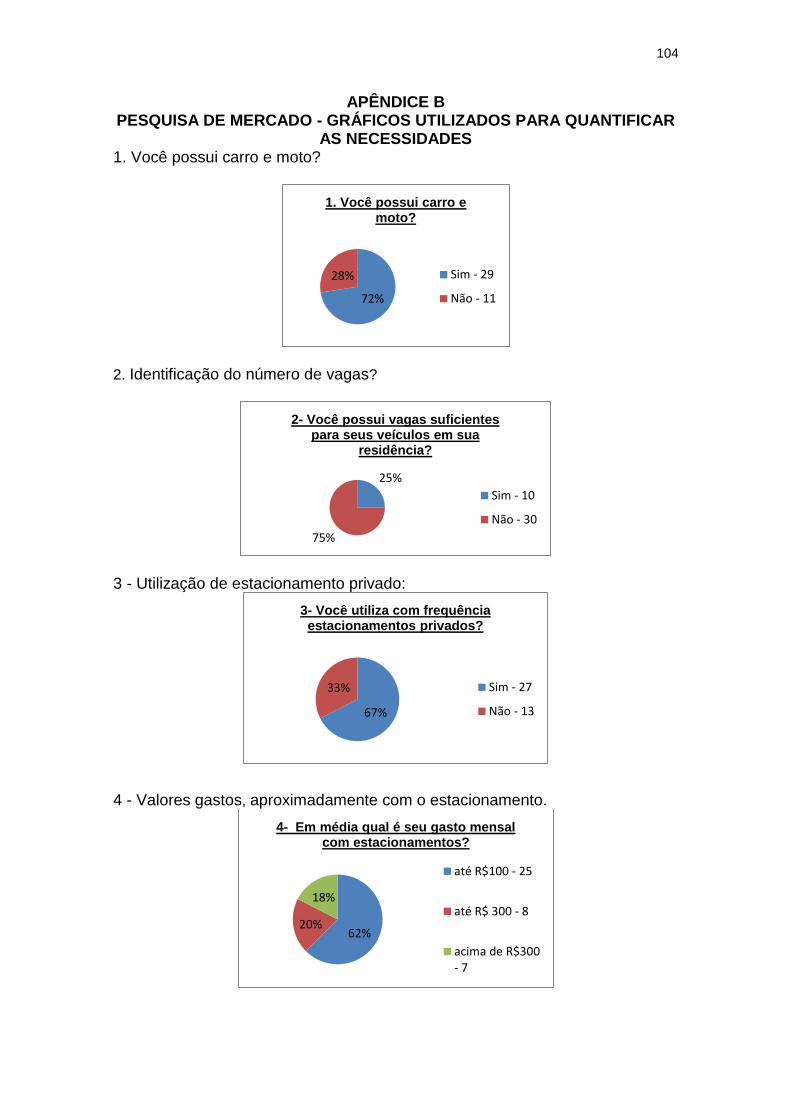
104
APÊNDICE B PESQUISA DE MERCADO - GRÁFICOS UTILIZADOS PARA QUANTIFICAR
AS NECESSIDADES 1. Você possui carro e moto?
2. Identificação do número de vagas?
3 - Utilização de estacionamento privado:
4 - Valores gastos, aproximadamente com o estacionamento.
72%
28%
1. Você possui carro e moto?
Sim - 29
Não - 11
25%
75%
2- Você possui vagas suficientes para seus veículos em sua
residência?
Sim - 10
Não - 30
67%
33%
3- Você utiliza com frequência estacionamentos privados?
Sim - 27
Não - 13
62% 20%
18%
4- Em média qual é seu gasto mensal com estacionamentos?
até R$100 - 25
até R$ 300 - 8
acima de R$300- 7

105
5-Qual é o grau de importância no quesito estacionamento para seu veículo?
6-Conhece o duplicador de vagas?
7 - Quais os atributos necessários que o duplicador deve oferecer?
FONTE: OS PRÓPRIOS AUTORES,2016.
25%
32%
43%
5- Qual é o grau de importância no quesito estacionamento para seus
veículos?
Pouco - 10 Médio - 13 Muito Importante - 17
65%
35%
6 - Já ouviu falar em duplicadores de vagas para motos?
Sim - 26
Não - 14
38
8
20
36
19
8 8
33
19
35
23
4
Atributos Indispensáveis

106
APÊNDICE C - FMEA DESIGN
FONTE: OS PRÓPRIOS AUTORES,2016.
Executado Nome do Produto / Processo
No do Produto / Processo
Projeto
Aprovado data FMEA no. Rev. Página no.
Caracterização da Falha Avaliação da situação atual Ação / Resultados
(4) (5) (9) (PoxSxPd)
Potencial Efeito da Falha Clie
nte
Inte
rno
Verificação do Projeto Ocorr
ência
(P
o)
Severid
ade (
S)
Dete
cção (
Pd)
Núm
ero
de
Prio
rid
ade d
e R
isco
(RP
N.)
Crí
tico
Ação
Recom
endada
Resp
on
sá
ve
l
Prazo Observ
ações
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18
1 estrutura flexionar perde funcionalidade especificação incorreta de material especificar material 4 7 1 28
especificação incorreta da carga máxima rever cálculos do projeto 6 7 1 42
falta de indicação de carga máxima suportada 4 7 1 28
oxidar perde resistência mecánica especificação incorreta de material especificar material 4 2 1 8
quebrar perde funcionalidade dimensionamento incorreto especificar dimensões 7 7 1 49
ergonomia peça muito grande dificulta o manuseio dimensionamento incorreto especificar dimensões 7 2 6 84
pesado dificulta o manuseio dimensionamento incorreto especificar dimensões 7 2 2 28
especificação incorreta de material especificar material 4 2 2 16
manuseio inadequado dificulta o manuseio dimensionamento incorreto especificar dimensões 7 2 3 42
proteção quebrar perde funcionalidade dimensionamento incorreto especificar dimensões 7 7 1 49
causar acidente especificação incorreta de material especificar material 4 8 1 32
ter cantos vivos causar acidente dimensionamento incorreto especificar dimensões 7 8 2 112 x especificar dimensões da proteção
superfície aspera causar acidente especificação incorreta de material especificar material 4 8 7 224 x especificar material da proteção da plataforma
2 polias reduzir a força aplicada quebrar causar acidente dimensionamento incorreto especificar dimensões 7 8 1 56
comprometer a carga especificação incorreta de material especificar material 4 6 1 24
travar perde funcionalidade dimensionamento incorreto especificar dimensões 7 7 1 49
guiar correia
desalinhada dificulta funcionalidade dimensionamento incorreto especificar dimensões 7 2 5 70
barulho excessivo desconforto dimensionamento incorreto especificar dimensões 7 3 1 21
correia arrebentada não elevação da base falta de manutenção especificar vida util da correia 3 3 1 9
3 fuso desalinhamento causar acidente dimensionamento incorreto especificar dimensões 7 8 1 56
desgaste causar acidente falta de lubrificação especificar tipo de lubrificação 4 5 2 40
4 quebrar desalinhamento do fuso torçao dos braços da estrutura isntruçoes de uso 4 2 1 8
dimensionamento incorreto especificar dimensões 7 2 1 14
ter folgas barulho tolerância incorreta especificar tolerâncias 7 4 10 280 xespecificar conjunto de porca quadrada e porca
cilindrica flangeada
vibrar Conjunto de elevaçao mal dimensionado especificar tolerâncias 7 4 10 280 xespecificar conjunto de porca quadrada e porca
cilindrica flangeada
desgaste dificulta elevaçao dimensionamento incorreto especificar dimensões 7 2 6 84
quebrar causar acidente dimensionamento incorreto especificar dimensões 7 8 1 56
especificação incorreta de material especificar material 4 8 1 32
5 plataforma apoio para a carga quebrar comprometer a carga especificação incorreta de material especificar material 4 6 1 24
causar acidente dimensionamento incorreto especificar dimensões 7 8 1 56
flexionar dificulta funcionalidade especificação incorreta de material especificar material 4 2 1 8
especificação incorreta da carga máxima rever cálculos do projeto 6 2 1 12
falta de indicação de carga máxima suportada 4 2 1 8
oxidar perde resistência mecánica especificação incorreta de material especificar material 4 2 1 8
ter cantos vivos causar acidente dimensionamento incorreto especificar dimensões 7 8 2 112 x especificar chanfros em cantos vivos
6 motor elétricoconverter energia elétrica
em energia mecânicasuperaquecer mal funcionamento Cabos de alimentação muito longos e/ou muito finos especificar cabos de alimentação 4 4 9 144 x
especificar motor com cabos de alimentação
adequados
Conexão incorreta dos cabos de ligação do motorverificar especificações de conexão do
fabricante4 3 6 72
Excesso de carga (mal dimensionado) especificar limite máximo de carga 6 2 8 96
Sobretensão ou subtensão na rede de alimentaçãoverificar especificações de tensão do
fabricante4 3 6 72
degradar isolamento causa acidentes excesso de temperaturaverificar especificações de isolamente
do fabricante2 8 3 48
desbalancear tensão oscilação de tensão maus contatosverificar especificações de conexão do
fabricante4 3 3 36
mal funcionamento desequilíbrio de tensão e / ou corrente entre as fasesverificar especificações de tensão do
fabricante4 3 6 72
indicação de carga máxima no
equipamento
no.
Nome do componente /
processo / operação ou
principal função
elevar a carga
ponto de apoio de
tensoes
facilitar a movimentação
da estrutura
suportar esforços
mecânicos
carro guia
Função Potencial Modo de Falha
indicação de carga máxima no
equipamento
APÊNDICE V - FMEA DESIGN
Efeitos da falha
Design FMEA
Potencial Causa da Falha
Cliente
Líder do projeto
Verificação do Projeto

107
APÊNDICE D CUSTOS PRELIMINARES DO DUPLICADOR DE VAGAS
FONTE: OS PRÓPRIOS AUTORES,2016.
Valor Unitário Valor Total
Material Mecânico
204,36R$ R$ 204,36
12,15R$ R$ 12,15
43,00R$ R$ 43,00
174,00R$ R$ 174,00
2,00R$ R$ 8,00
2,00R$ R$ 2,00
5,00R$ R$ 15,00
55,00R$ R$ 55,00
33,00R$ R$ 33,00
3,00R$ R$ 6,00
110,00R$ R$ 220,00
12,00R$ R$ 24,00
23,00R$ R$ 46,00
430,00R$ R$ 430,00
22,00R$ R$ 22,00
387,84R$ R$ 387,84
10,00R$ R$ 10,00
42,00R$ R$ 42,00
R$ 1.734,35
R$ 525,00 R$ 525,00
R$ 9,00 R$ 45,00
R$ 6,00 R$ 12,00
R$ 350,00 R$ 350,00
R$ 40,00 R$ 80,00
R$ 42,00 R$ 42,00
R$ 1.054,00
R$ 150,00 R$ 900,00
R$ 180,00 R$ 720,00
R$ 150,00 R$ 150,00
R$ 1.770,00
Material Mecânico R$ 1.734,35
Motor Elétrico 0,75 CV
Fiação Comando Elétrico
Placa Eletronica
Total Materiais Eletricos
Serviços:
Usinagem 6 Horas
Quadro Elétrico 1 Pç
1 Cj
Total de Serviços
4 Horas
Dobrada conforme desenho 2
Soldagem
Transporte
Custos Totais
1 Pç
Fiação Alimentação 5 Mts
Rolamento de esfera angular 1
Total Materiais Mecânicos
Materiais Elétricos
1 Pçs
Chaves Fim de Curso 2 Pçs
2 Mts
1
Chapa Sae 1020 20x260x280 1
Tipo de Material Quant.
Tubo Quadrado 4,75x50x100x6000 1
Cantoneira 3/8x3/8x3x3000
1
Oxicorte conforme desenho 3
1
Bloco Sae 1020 12,7x50x100 4
Chapa sae 1020 4x500x2400
Barra redonda sae 1020 Ø40x40
1
Oxicorte conforme desenho 2
Oxicorte conforme desenho
Oxicorte conforme desenho
1
2
Oxicorte conforme desenho
Materiais Eletricos R$ 1.054,00
Serviços R$ 1.770,00
Total R$ 4.558,35
Oxicorte conforme desenho 2
Rolamento Simples 1
Correia em V 1
Fuso TR25x2000 1
Viga I W150x13,5x1500 1

108
APÊNDICE E DESENHOS TÉCNICOS DO PROTÓTIPO*
* A numeração da lista refere-se à sequência de apresentação dos desenhos
em A3, apresentados nas páginas subsequentes.
1- BASE SOLDADA 2- BRAÇOS DE SUSTENTAÇÃO 3- LISTA DE PEÇAS DE REPOSIÇÃO

109
APÊNDICE F LISTA DE PEÇAS

110
APÊNDICE G ESQUEMA ELÉTRICO APLICADO AO PROJETO