Embed Size (px)
Citation preview
Vibrações e Dinâmica das MáquinasAula – Fundamentos de vibrações
Professor: Gustavo Si lva
1
1.Movimentos•Movimento oscilatório é qualquer movimento onde o sistema observado move-se em torno de uma certa posição, não sendo necessário algum padrão repetitivo definido. Um exemplo de movimento oscilatório pode ser um veículo que passa por diversas lombadas sem que as mesmas estejam necessariamente espaçadas uniformemente.
•Movimento periódico é um caso de movimento oscilatório em particular. Neste caso o movimento padrão repete-se em iguais intervalos de tempo. Este intervalo de tempo é chamado de período. A chamada frequência é o inverso do período, ou seja, enquanto o período é dado pelo tempo necessário para que haja um ciclo, a frequência é dada pelo número de ciclos ocorridos em um determinado tempo.
•Movimento harmônico é um caso particular de movimento periódico. Neste caso o padrão de movimento pode ser descrito por uma função seno ou cosseno.
2

2.Frequência naturale Ressonância
•Frequência natural é a frequência na qual um sistema conservativo ou subamortecido vibra livre quando sujeito a condições iniciais.
•Ressonância é o fenômeno que ocorre quando se excita um sistema conservativo com uma força harmônica cuja frequência coincide com uma de suas frequências naturais. A resposta do sistema cresce indefinidamente.
3
3. Vibração livre e forçada•Vibração livre ocorre quando um sistema recebe uma perturbação inicial e logo após o mesmo continua a vibrar por conta própria. Um exemplo de vibração livre é o movimento de um pêndulo após o mesmo receber uma condição inicial de deslocamento ou de velocidade.
•Vibração forçada ocorre quando o sistema é sujeito a uma força externa. Se um motor desbalanceado em funcionamento está sobre uma bancada, esta bancada está vibrando com a chamada vibração forçada.
4

4. Vibração não amortecida e amortecida
•Vibração não amortecida: ocorre em sistemas conservativo, ou seja, sistemas onde não existe perda ou dissipação de energia de nem uma forma. Neste caso, após o sistema receber uma excitação, o mesmo vibrará por tempo indeterminado.
•Vibração amortecida: se um sistema dissipativo (amortecido) receber uma martelada, o mesmo vibrará por um tempo determinado e voltará ao repouso. Isto ocorre pois a energia do sistema está sendo dissipada de alguma forma.
5
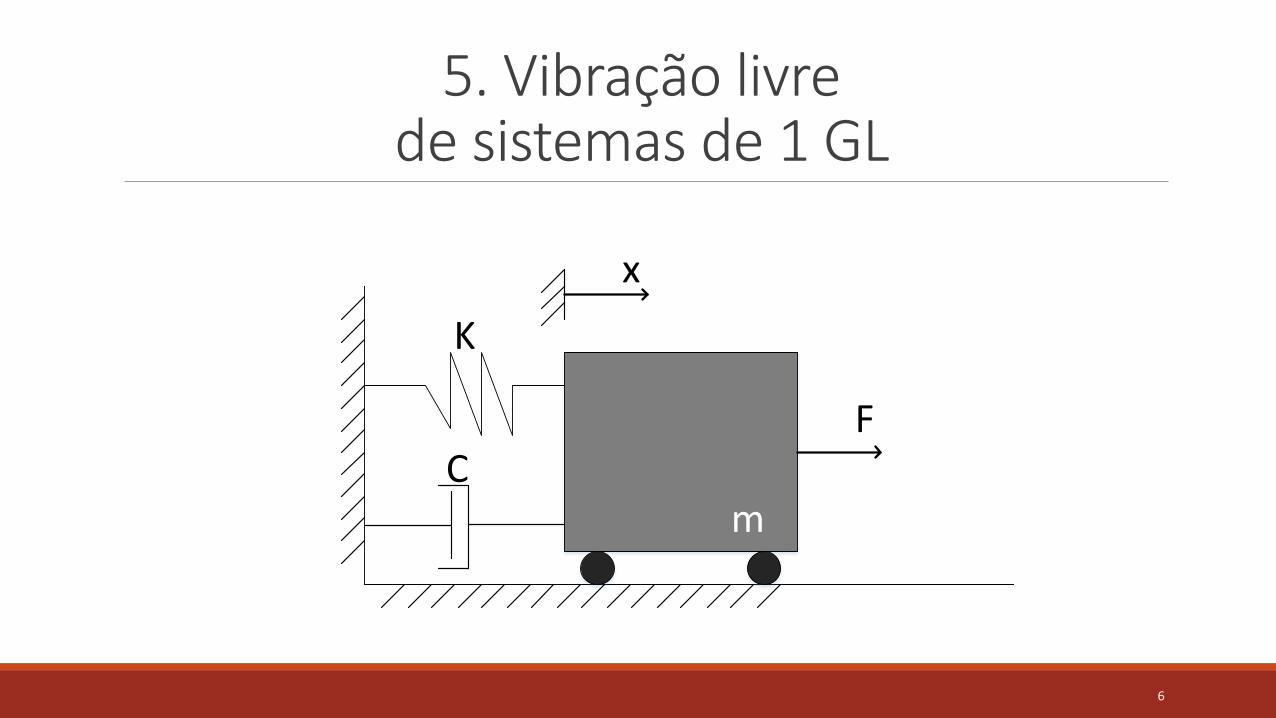
5. Vibração livre de sistemas de 1 GL
6
m
x
K
CF
5. Vibração livre de sistemas de 1 GL
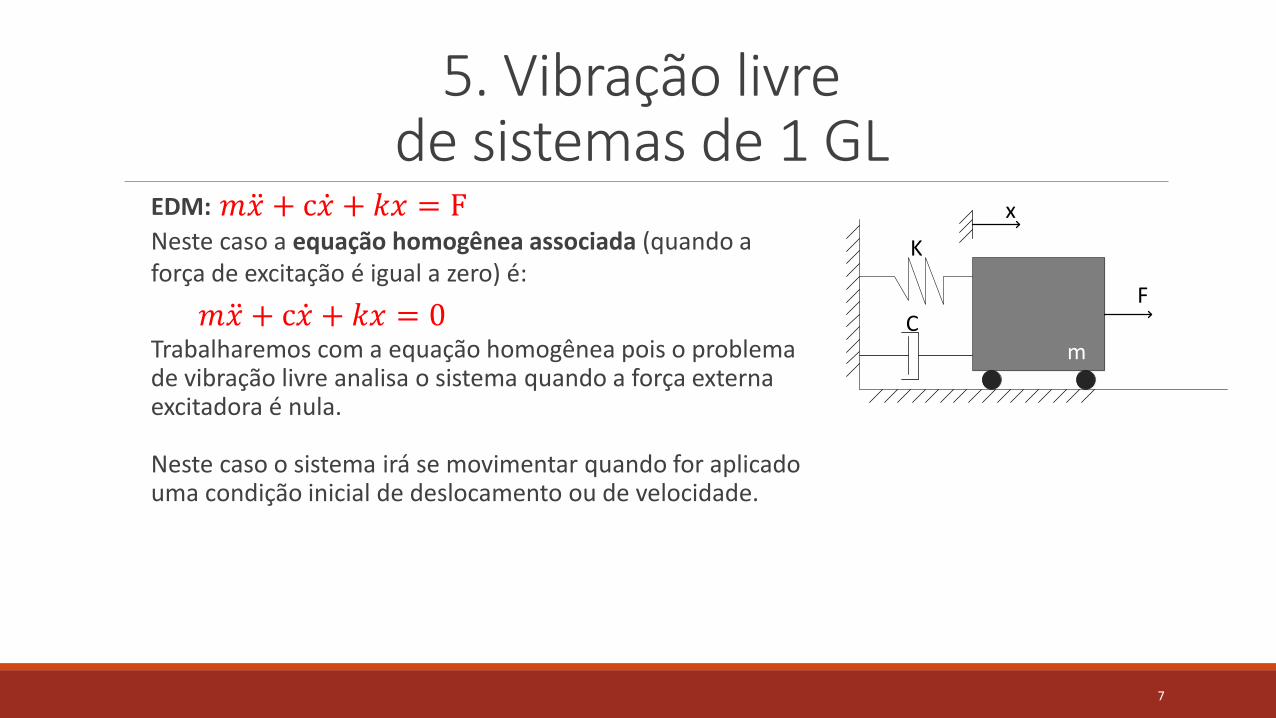
EDM:
Neste caso a equação homogênea associada (quando a força de excitação é igual a zero) é:
Trabalharemos com a equação homogênea pois o problema de vibração livre analisa o sistema quando a força externa excitadora é nula.
Neste caso o sistema irá se movimentar quando for aplicadouma condição inicial de deslocamento ou de velocidade.
7
m
x
K
CF
𝑚 𝑥 + c 𝑥 + 𝑘𝑥 = 0
𝑚 𝑥 + c 𝑥 + 𝑘𝑥 = F

5. Vibração livre de sistemas de 1 GL
Equação homogênea:
A solução que proponho é:
Derivando para encontrar a velocidade e a aceleração:
onde C e s são constantes a determinar.
8
m
x
K
CF
𝑚 𝑥 + c 𝑥 + 𝑘𝑥 = 0
𝑥 = 𝐶𝑒𝑠𝑡
𝑥 = 𝐶𝑒𝑠𝑡 → 𝑥 = 𝐶𝑠𝑒𝑠𝑡 → 𝑥 = 𝐶𝑠²𝑒𝑠𝑡

5. Vibração livre de sistemas de 1 GL
Substituindo os valores de x na equação homogênea:
Analisando a equação:-Se C é igual a 0, x é igual a 0. Neste caso meu sistema está parado. Logo, apesar de satisfazer minha equação,esta solução não nos interessa.-𝒆𝒔𝒕 nunca será 0. Se S for real, o produto nunca será igual a 0,se S for complexo, o módulo do produto será sempre igual a 1.-Nos resta o termo 𝑚s² + c𝑠 + 𝑘 ser igual a 0.
Polinômio característico:
9
m
x
K
CF
𝑚s2 + c𝑠 + 𝑘 𝐶𝑒𝑠𝑡 = 0
𝑥 = 𝐶𝑒𝑠𝑡
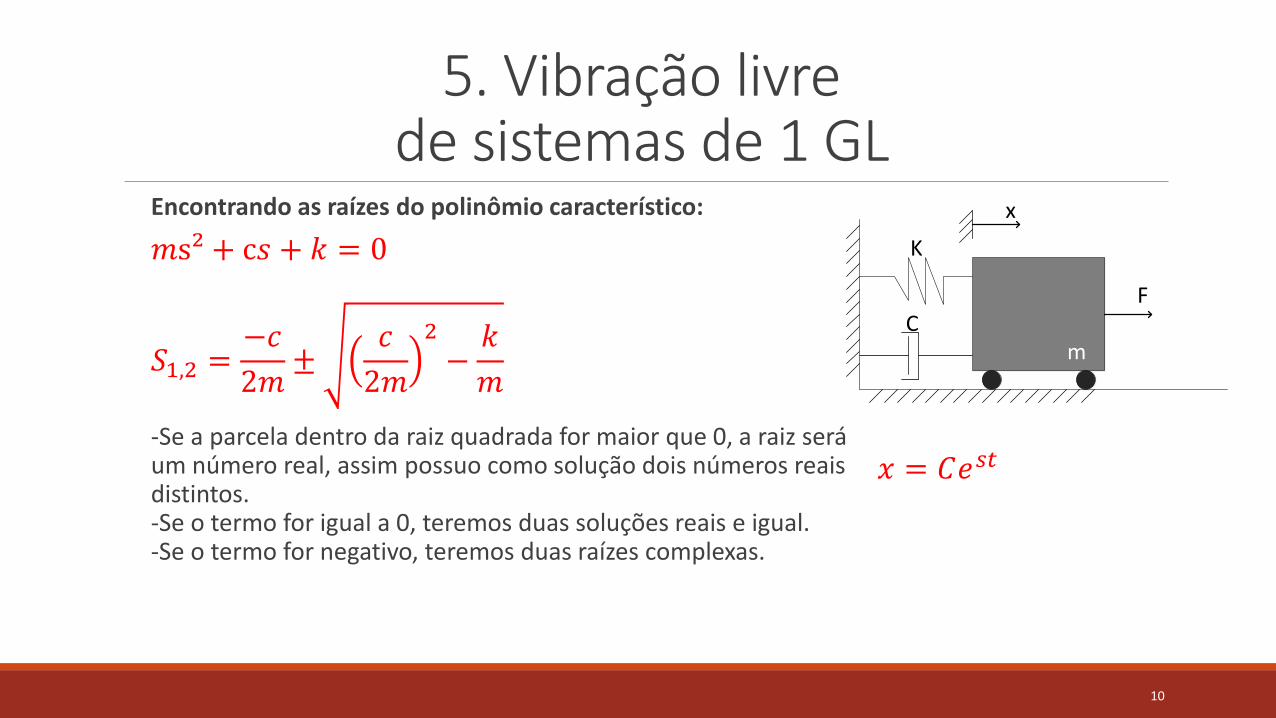
𝑚s² + c𝑠 + 𝑘 = 0
5. Vibração livre de sistemas de 1 GL
Encontrando as raízes do polinômio característico:
-Se a parcela dentro da raiz quadrada for maior que 0, a raiz será um número real, assim possuo como solução dois números reaisdistintos.-Se o termo for igual a 0, teremos duas soluções reais e igual.-Se o termo for negativo, teremos duas raízes complexas.
10
m
x
K
CF
𝑥 = 𝐶𝑒𝑠𝑡
𝑚s² + c𝑠 + 𝑘 = 0
𝑆1,2 =−𝑐
2𝑚±
𝑐
2𝑚
2
−𝑘
𝑚
5. Vibração livre de sistemas de 1 GL
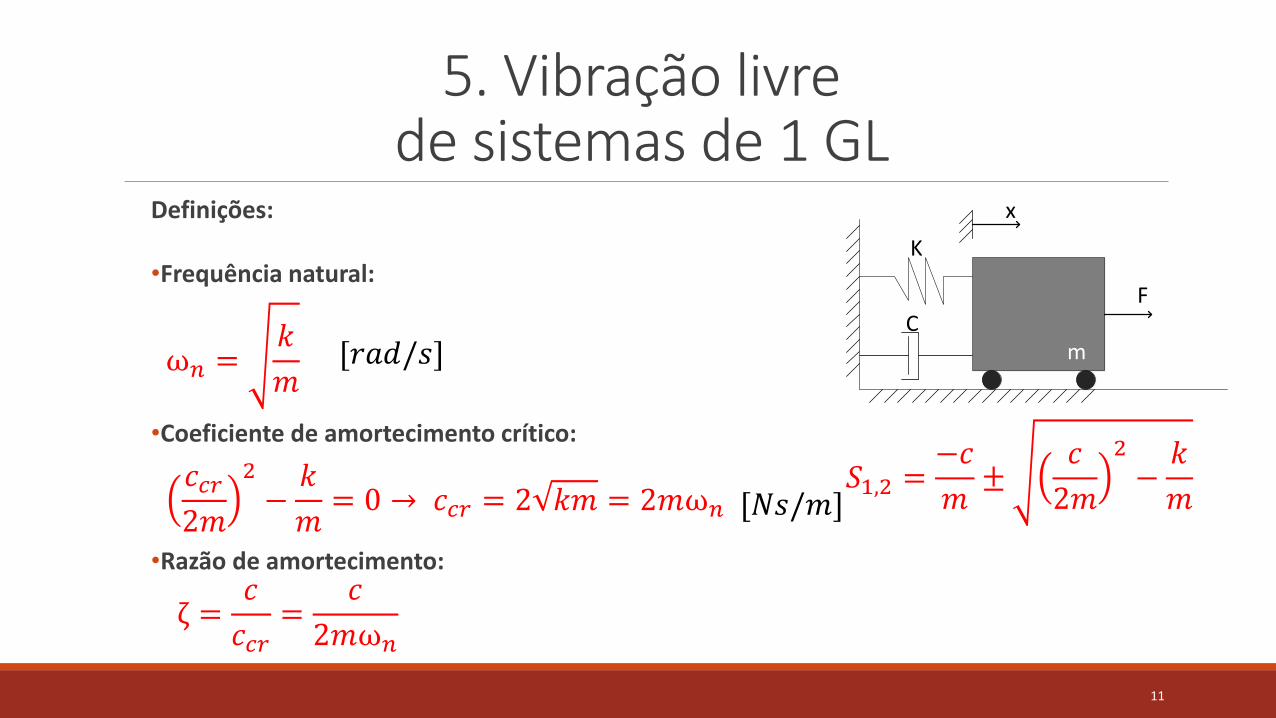
Definições:
•Frequência natural:
•Coeficiente de amortecimento crítico:
•Razão de amortecimento:
11
m
x
K
CF
ω𝑛 =𝑘
𝑚[𝑟𝑎𝑑/𝑠]
𝑆1,2 =−𝑐
𝑚±
𝑐
2𝑚
2
−𝑘
𝑚𝑐𝑐𝑟2𝑚
2
−𝑘
𝑚= 0 → 𝑐𝑐𝑟 = 2 𝑘𝑚 = 2𝑚ω𝑛
ζ =𝑐
𝑐𝑐𝑟=
𝑐
2𝑚ω𝑛
[𝑁𝑠/𝑚]

5. Vibração livre de sistemas de 1 GL
Equação de movimento em função de m, c e k:
Equação de movimento em função dos parâmetros modais:
12
m
x
K
CF
𝑆1,2 =−𝑐
𝑚±
𝑐
2𝑚
2
−𝑘
𝑚
𝑚 𝑥 + c 𝑥 + 𝑘𝑥 = 0
𝑥 +𝑐
𝑚 𝑥 +
𝑘
𝑚𝑥 = 0
𝑥 + 2ζω𝑛 𝑥 + ω𝑛²𝑥 = 0
5. Vibração livre de sistemas de 1 GL
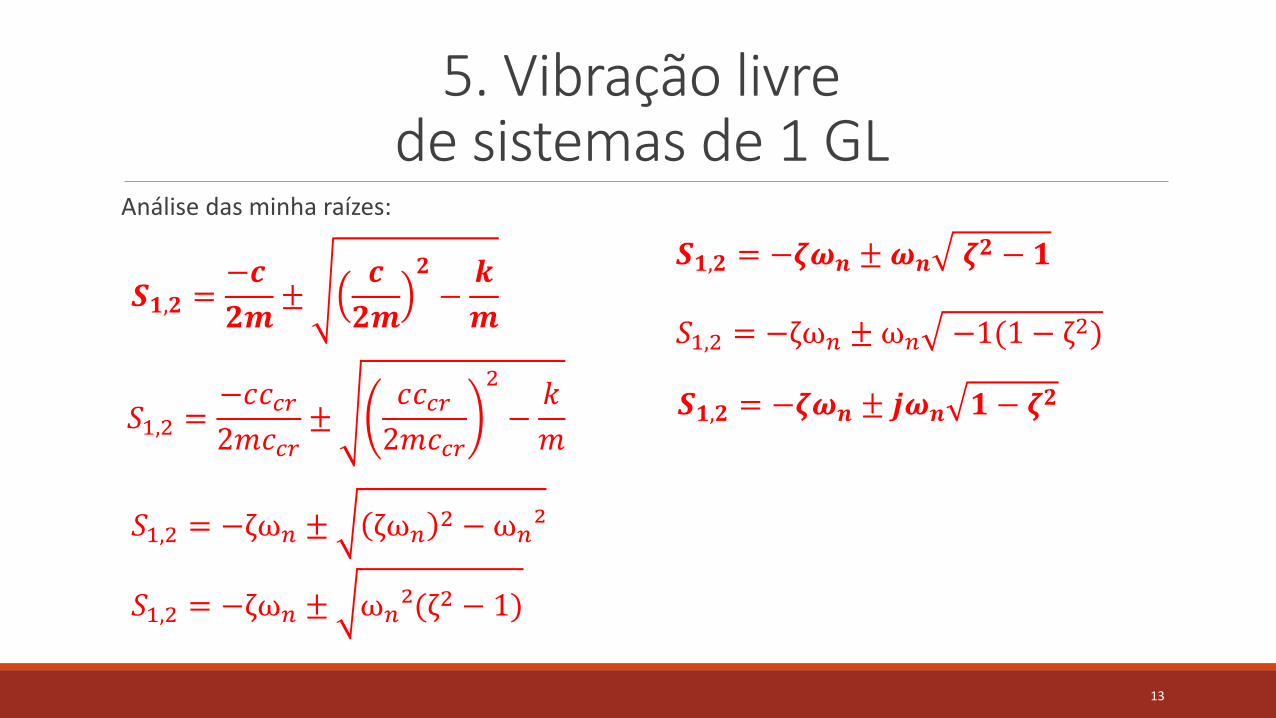
Análise das minha raízes:
13
𝑺𝟏,𝟐 =−𝒄
𝟐𝒎±
𝒄
𝟐𝒎
𝟐
−𝒌
𝒎
𝑆1,2 =−𝑐𝑐𝑐𝑟2𝑚𝑐𝑐𝑟
±𝑐𝑐𝑐𝑟2𝑚𝑐𝑐𝑟
2
−𝑘
𝑚
𝑆1,2 = −ζω𝑛 ± ζω𝑛2 −ω𝑛²
𝑆1,2 = −ζω𝑛 ± ω𝑛²(ζ2 − 1)
𝑺𝟏,𝟐 = −𝜻𝝎𝒏 ±𝝎𝒏 𝜻𝟐 − 𝟏
𝑆1,2 = −ζω𝑛 ±ω𝑛 −1(1 − ζ2)
𝑺𝟏,𝟐 = −𝜻𝝎𝒏 ± 𝒋𝝎𝒏 𝟏 − 𝜻𝟐

5. Vibração livre de sistemas de 1 GL
Análise de 𝜁: -𝜁 = 0 → 𝑆1,2 = ±𝑗ω𝑛 Sistema conservativo
-0 < 𝜁 < 1 → 𝑆1,2 = −ζω𝑛 ± 𝑗ω𝑛 1 − ζ2 Sistema sub-amortecido
-𝜁 = 1 → 𝑆1,2 = −𝜁ω𝑛 Sistema criticamente amortecido
-𝜁 > 1 → 𝑆1,2 = −ζω𝑛 ±ω𝑛 ζ2 − 1 Sistema superamortecido
14
𝑆1,2 =−𝑐
2𝑚±
𝑐
2𝑚
2
−𝑘
𝑚𝑆1,2 = −ζω𝑛 ±ω𝑛 ζ2 − 1 𝑆1,2 = −ζω𝑛 ± 𝑗ω𝑛 1 − ζ2

6. Solução para sistemas 1GL-Vibração livre-
Sistemas não amortecidosPara o caso de um sistema não amortecido, a equação de movimento 𝑚 𝑥 + c 𝑥 + 𝑘𝑥 = 0 passa a ser:
Logo, o polinômio característico da equação diferencial é dado por:
Vimos que a solução para equação diferencial pode ser dada por:
Assim, a chamada solução geral pode ser escrita:
Onde C1 e C2 são constantes
15
𝑥(𝑡) = 𝐶𝑒𝑠𝑡
𝑥 𝑡 = 𝐶1𝑒𝑠1𝑡 + 𝐶2𝑒
𝑠2𝑡
𝑚s² + 𝑘 = 0
𝑚 𝑥 + 𝑘𝑥 = 0

6. Solução para sistemas 1GL-Vibração livre-
Sistemas não amortecidosLembrando que para um sistema conservativo (sem amortecimento) 𝜁 = 0 → 𝑆1,2 = ±𝑗ω𝑛
Podemos escrever a solução geral substituindo as raízes S1 e S2:
Das relações de Euler 𝑒±𝑖θ = cos θ ± 𝑗 sin θ temos:
Por fim temos que nossa resposta temporal pode ser dada por:
Onde A1 e A2 são novas constantes.
16
𝑥(𝑡) = 𝐶1 (cosω𝑛𝑡 + j sinω𝑛𝑡) + 𝐶2 (cosω𝑛𝑡 − j sinω𝑛𝑡)
𝑥(𝑡) = (𝐶1 + 𝐶2) cosω𝑛𝑡 + j 𝐶1 − 𝐶2 sinω𝑛𝑡
𝑥(𝑡) = 𝐴1 cosω𝑛𝑡 + 𝐴2sinω𝑛𝑡
𝑥 𝑡 = 𝐶1𝑒𝑗ω𝑛𝑡 + 𝐶2𝑒
−𝑗ω𝑛𝑡
6. Solução para sistemas 1GL-Vibração livre-
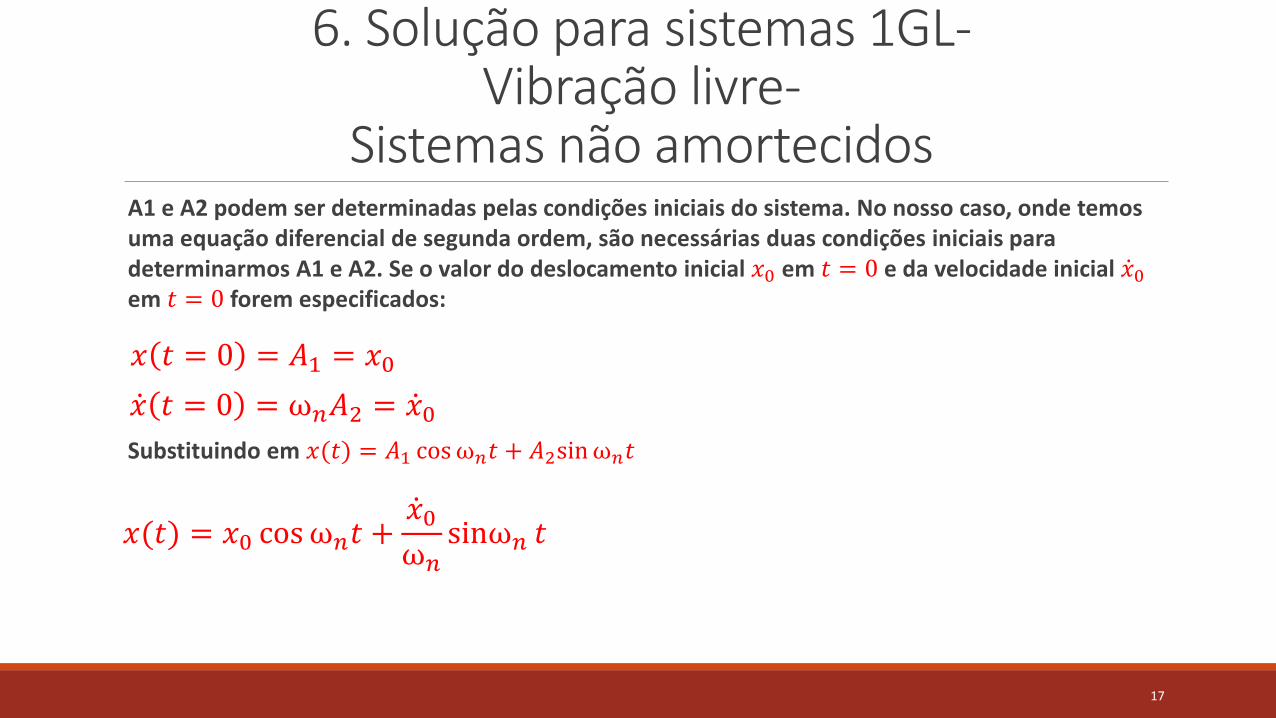
Sistemas não amortecidosA1 e A2 podem ser determinadas pelas condições iniciais do sistema. No nosso caso, onde temos uma equação diferencial de segunda ordem, são necessárias duas condições iniciais para determinarmos A1 e A2. Se o valor do deslocamento inicial 𝑥0 em 𝑡 = 0 e da velocidade inicial 𝑥0em 𝑡 = 0 forem especificados:
Substituindo em 𝑥(𝑡) = 𝐴1 cosω𝑛𝑡 + 𝐴2sinω𝑛𝑡
17
𝑥 𝑡 = 0 = 𝐴1 = 𝑥0
𝑥 𝑡 = 0 = ω𝑛𝐴2 = 𝑥0
𝑥(𝑡) = 𝑥0 cosω𝑛𝑡 + 𝑥0ω𝑛
sinω𝑛 𝑡

6. Solução para sistemas 1GL-Vibração livre-
Sistemas não amortecidosConsiderando A1 e A2 como sendo:
onde A e φ são novas constantes que podem ser expressas da forma:
Substituindo 𝐴1 e 𝐴2 em 𝑥(𝑡) = 𝐴1 cosω𝑛𝑡 + 𝐴2sinω𝑛𝑡
18
𝐴1 = 𝐴 cosφ
𝐴2 = 𝐴 sinφ
𝐴 = 𝐴12 +𝐴2
2=[𝑥02 + (
𝑥0
ω𝑛)²]1/2= 𝐴𝑚𝑝𝑙𝑖𝑡𝑢𝑑𝑒
φ = 𝑡𝑔−1(𝐴2
𝐴1)=𝑡𝑔−1
𝑥0
𝑥0ω𝑛= Â𝑛𝑔𝑢𝑙𝑜 𝑑𝑒 𝑓𝑎𝑠𝑒
𝑥(𝑡) = 𝐴 cos(ω𝑛𝑡 − φ)

6. Solução para sistemas 1GL-Vibração livre-
Sistemas não amortecidosUsando as relações :
onde A e φ são novas constantes que podem ser expressas da forma:
Substituindo 𝐴1 e 𝐴2 em 𝑥(𝑡) = 𝐴1 cosω𝑛𝑡 + 𝐴2sinω𝑛𝑡
19
𝐴1 = 𝐴0 sinφ
𝐴2 = 𝐴0 cosφ
𝐴0=[𝑥02 + (
𝑥0
ω𝑛)²]1/2= 𝐴𝑚𝑝𝑙𝑖𝑡𝑢𝑑𝑒
φ0=𝑡𝑔−1𝑥0ω𝑛
𝑥0= Â𝑛𝑔𝑢𝑙𝑜 𝑑𝑒 𝑓𝑎𝑠𝑒
𝑥(𝑡) = 𝐴0 sin(ω𝑛𝑡 + φ0)
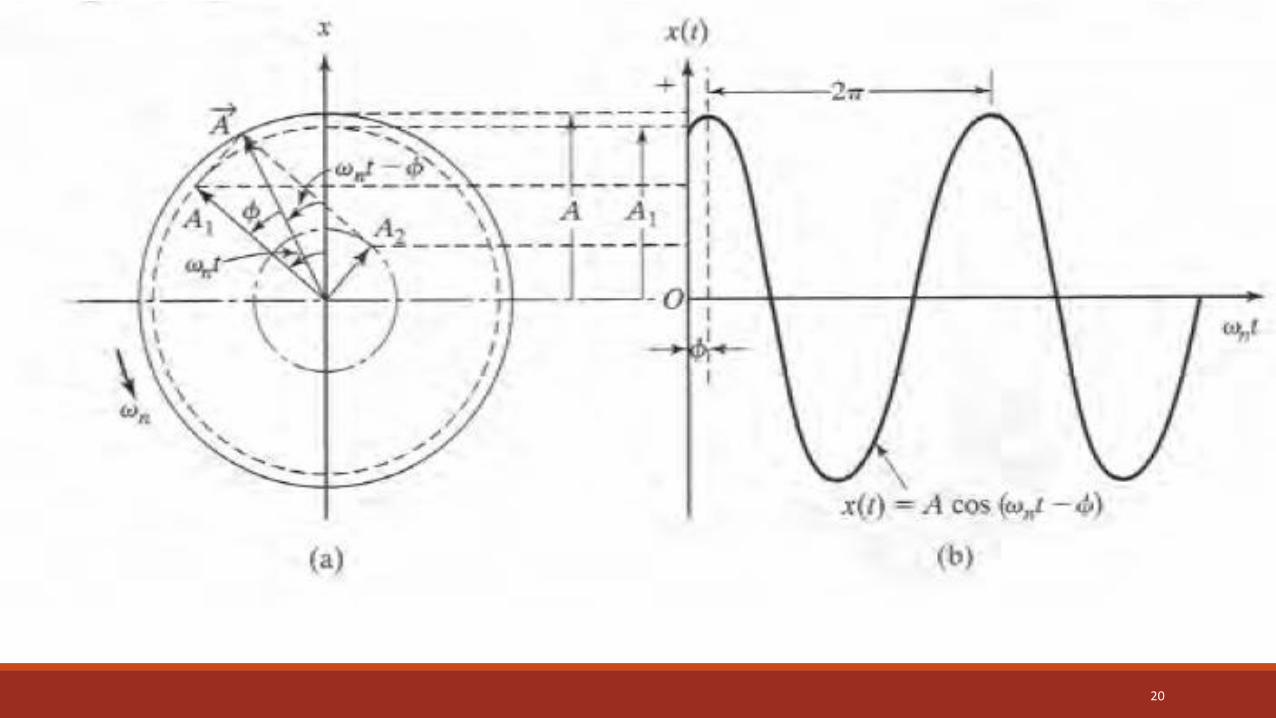
6. Solução para sistemas 1GL-Vibração livre-
Sistemas não amortecidos
20