Embed Size (px)
Citation preview

Vibrações e Dinâmica das MáquinasAula – Vibração livre com amortecimento viscoso-1GL
Professor: Gustavo Si lva
1

1. Força de amortecimento e equação de movimento
Como foi dito na aula de equações de movimento, a força do amortecimento é proporcional a velocidade:
c [Ns/m] - constante de amortecimento
O sistema ao lado possui amortecimento viscoso, assim a equação de movimento do sistema é dada por:
2
𝐹 = −𝑐 𝑥
m
x
K
CF
𝑚 𝑥 + c 𝑥 + 𝑘𝑥 = F

1. SoluçãoComo já vimos, o coeficiente de amortecimento crítico e a razão de amortecimento são dados por:•Coeficiente de amortecimento crítico:
•Razão de amortecimento:
•Desta forma, as raízes S1 e S2 podem ser escritas da forma:
3
m
x
K
CF
𝑐𝑐𝑟2𝑚
2
−𝑘
𝑚= 0 → 𝑐𝑐𝑟 = 2 𝑘𝑚 = 2𝑚ω𝑛
ζ =𝑐
𝑐𝑐𝑟=
𝑐
2𝑚ω𝑛
𝑆1,2 = −ζω𝑛 ±ω𝑛 ζ2 − 1
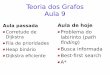
1. Solução•Frequência natural amortecida:
4
m
x
K
CF
ω𝑑 = ω𝑛 1 − ζ2𝑆1,2 = −ζω𝑛 ± 𝑗ω𝑛 1 − ζ2

2. RaízesO comportamento vibratório do sistema depende da magnitude do amortecimento
Análise de 𝜁: -𝜁 = 0 → 𝑆1,2 = ±𝑗ω𝑛 Sistema conservativo
-0 < 𝜁 < 1 → 𝑆1,2 = −ζω𝑛 ± 𝑗ω𝑛 1 − ζ2 Sistema sub-amortecido
-𝜁 = 1 → 𝑆1,2 = −𝜁ω𝑛 Sistema criticamente amortecido
-𝜁 > 1 → 𝑆1,2 = −ζω𝑛 ±ω𝑛 ζ2 − 1 Sistema superamortecido
5
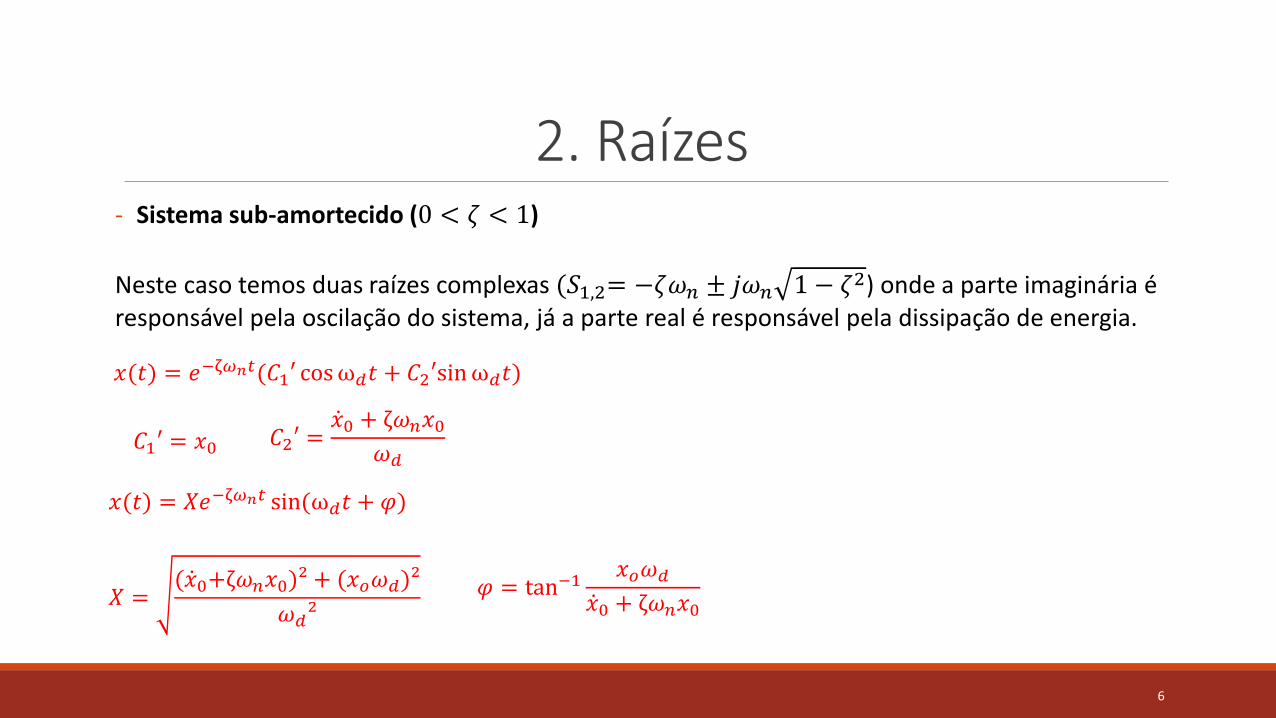
2. Raízes- Sistema sub-amortecido (0 < 𝜁 < 1)
Neste caso temos duas raízes complexas (𝑆1,2= −𝜁𝜔𝑛 ± 𝑗𝜔𝑛 1 − 𝜁2) onde a parte imaginária é responsável pela oscilação do sistema, já a parte real é responsável pela dissipação de energia.
6
𝑥(𝑡) = 𝑒−ζ𝜔𝑛𝑡(𝐶1′ cosω𝑑𝑡 + 𝐶2′sinω𝑑𝑡)
𝐶1′ = 𝑥0
𝑥(𝑡) = 𝑋𝑒−ζ𝜔𝑛𝑡 sin(ω𝑑𝑡 + 𝜑)
𝐶2′ = 𝑥0 + ζ𝜔𝑛𝑥0
𝜔𝑑
𝑋 =( 𝑥0+ζ𝜔𝑛𝑥0)² + (𝑥𝑜𝜔𝑑)²
𝜔𝑑²𝜑 = tan−1
𝑥𝑜𝜔𝑑
𝑥0 + ζ𝜔𝑛𝑥0

2. Raízes- Sistema criticamente amortecido (𝜁 = 1)
Neste caso temos duas raízes real iguais (𝑆1,2 = −𝜁ω𝑛), sendo assim o sistema não oscila, pois não possui parte imaginária. Neste caso a massa retorna a sua posição de repouso com o menor tempo possível. Assim o amortecimento crítico é muito utilizado por exemplo em armas de fogo de tiro sequencial, desta forma a arma volta a sua posição original em um tempo mínimo, sem vibrar.
7
𝑥(𝑡) = 𝑒−𝜔𝑛𝑡(𝐶1 + 𝐶2𝑡)
𝐶2 = 𝑥0 + 𝜔𝑛𝑥0
𝐶1 = 𝑥0O tempo na qual x(t) atinge um valor máximo é
obtida por: 𝑡 =1
𝜔𝑛−
𝐶1
𝐶2

2. Raízes- Sistema superamortecido (1 < 𝜁)
Neste caso temos duas raízes real (𝑆1,2 = −ζω𝑛 ±ω𝑛 ζ2 − 1), sendo assim o sistema novamente não oscila, pois não possui parte imaginária.
8
𝑥(𝑡) = 𝐶1𝑒(−ζ+ ζ2−1)𝜔𝑛𝑡 + 𝐶2𝑒
(−ζ− ζ2−1)𝜔𝑛𝑡)
𝐶1 =𝑥0 ∙ 𝜔𝑛 ζ + 𝜁2 − 1 + 𝑥0
2 ∙ 𝜔𝑛 𝜁2 − 1
𝐶2 =−𝑥0 ∙ 𝜔𝑛 ζ − 𝜁2 − 1 − 𝑥0
2 ∙ 𝜔𝑛 𝜁2 − 1

3. Vibração livre de sistemas de 1 GL
9

4. Decremento logarítmicoO decremento logarítmico representa a taxa de redução da amplitude de vibração de um sistema vibratório amortecido.
10
𝛿 = ln𝑥1𝑥2
=2𝜋ζ
1 − ζ2

5. Exercicio
11
[1]

5. Exercicio
12
[1]

Bibliografia•RAO, S. S. Vibrações Mecânicas. São Paulo: Pearson Prentice Hall, 4 ed., 2009.
13


![Estatística e Modelos Probabilísticos - COE241classes/est-prob-2018/slides/aula_9.pdf · Rosa – 2018 Variância Var[X] é sempre um número não negativo A raiz quadrada da variância](https://img.document.onl/doc/110x75/5c5f3d6f09d3f2341f8b7820/estatistica-e-modelos-probabilisticos-classesest-prob-2018slidesaula9pdf.jpg)