1
Apresentação
A disciplina Álgebra Linear, que faz parte da grade curricular dos cursos de
Exatas, dá continuidade aos estudos de cálculo dos referidos cursos. Esta disciplina
objetiva dar ao estudante uma continuidade no aprendizado de matemática iniciada
com a disciplina Cálculo Diferencial e Integral.
Sabemos a importância da Matemática para o estudante de outras ciências,
como por exemplo: Computação, Arquitetura, Física etc. Em função disso, espera-se
que este trabalho seja um instrumento a mais para os estudos que você está
realizando na área de Exatas.
O conteúdo da disciplina Álgebra Linear é composto de Matriz, Determinante,
Sistema de Equações Lineares e suas devidas aplicações além de apresentar os
primeiros passos nos estudos de Espaços Vetoriais e Transformações Lineares.
Finalmente pretendemos que este trabalho venha contribuir para seu
crescimento intelectual, melhorando o desenvolvimento de seu raciocínio lógico, com
isso contribuindo para sua formação.
Um bom aprendizado!
Prof, Anicio Bechara Arero.

2
MATRIZES
Objetivo de Aprendizagem
- Conceituar matriz.
- Aplicar as operações com matrizes.
- Resolver problemas práticos.
1.0- INTRODUÇÃO
Imagine um empresário que tem uma rede de cinco lojas de materiais de
construção que ele denominou de A, B, C, D, e E, distribuídas nos bairros da grande
Belém.
Em função da quantidade de loja, para facilitar o controle, ele anota o faturamento
mensal, em reais, de cada loja, arrumando-os em tabelas.
Com a obtenção dos dados de julho a dezembro de 2015, o empresário, utilizando o
Excel, construiu uma planilha com a seguinte disposição:
Julho agosto Setembro outubro novembro dezembro
A 380.550 338.000 349.036 326.000 349.800 390.500
B 386.000 239.000 259.400 247.000 267.500 156.550
C 578.000 548.400 530.000 526.600 564.900 584.700
D 128.000 124.080 123.098 124.000 124.000 128.680
E 281.300 274.076 275.800 274.900 278.550 282.908
Observe que esta disposição dos dados facilita o controle quanto ao faturamento de
cada loja, pois, com uma simples observação, o empresário sabe quanto uma loja
arrecadou.
Por exemplo: A loja B, em dezembro, arrecadou 156.550 (encontro da 2ª linha com a
6ª coluna). Tal valor chama a atenção do empresário, pois, ele observa que houve uma
queda acentuada no faturamento em relação à média (258.430). Em decorrência desse
valor, o empresário vai à atrás dos motivos que levaram a essa diminuição.
2.0- Definição de Matriz: denomina-se matriz do tipo “m x n” (lê-se “m por n”) a toda
tabela de números, dispostos em “m” linhas e “n” colunas. Essa tabela pode ficar entre
parênteses ( ), entre colchetes [ ] ou entre barras duplas . As duas primeiras
representações são as mais utilizadas. Por exemplo:

3
33
210
023
451
33
tipodoAMatrizA
23
21
35
32
23
tipodoAMatrizB
3163231
tipodoAMatrizB
3.0- Representação Genérica de uma Matriz.
nmtipodoAMatriz
aaaa
aaaa
aaaa
aaaa
A
mnmmm
n
n
n
nm
...
....................................
...
...
...
321
3333231
2232221
1311211
É relevante observar que os índices da letra “A” representam a quantidade de
linhas (m) e a quantidade de colunas (n) existentes na matriz, por exemplo: A3x2 é a
matriz constituída por 3 linhas e 2 colunas. Os índices da letra “a” representam a linha
(i) e a coluna (j) em que se encontra o elemento, por exemplo: a32 é o elemento (aij )
que se encontra na 3ª linha (i = 3) e na 2ª coluna (j = 2). Podemos abreviar a
representação genérica por A = (aij)mxn.
Exemplos:
1) Em relação a matriz abaixo, determine:
a) a13 b) a32 c) 2.a22 + 4.a31 d) 5.a11 – 3.a12

4
210
023
451
33A
a) a13 = 4 (elemento que se encontra no cruzamento da 1a linha com a 3a coluna)
b) a32 = 1
c) 2.a22 + 4.a31 = 2.(-2) + 4.0 = -4
d) 5.a11 – 3.a12 = 5.(-1) – 3.5 = -5 – 15 = -20
2) Representar explicitamente a matriz A = (aij)3x2 tal que aij = 3i – 2j.
licitaçãorepresentaA
a
a
a
a
a
a
jia
genéricaçãorepresenta
aa
aa
aa
x
ij
exp
57
24
11
52.23.3
71.23.3
22.22.3
41.22.3
12.21.3
11.21.3
)23(
23
32
31
22
21
12
11
3231
2221
1211
4.0- Tipos de Matrizes
10) Matriz quadrada: apresenta o número de linhas igual ao número de colunas. Exemplo:
0,2,4:sec
2,2,1:
210
023
451
33
undáriadiagonaldaelementos
prencipaldiagonaldaelementosA
20) Matriz identidade: Apresenta todos os elementos da diagonal principal iguais a 1 e
os demais elementos nulos.

5
100
010
001
33I
3o) Matriz Nula: apresenta todos os elementos nulos.
000
000
000
33O
4o) Matrizes Transpostas: as linhas da matriz A é, ordenadamente, igual as colunas
da matriz transposta At.
57
24
11
23 xA At
2x3=
521
741
Propriedades da Matriz Transposta
1a) (A + B)T = AT + BT
2a) (kA)T = k.AT
3a) (AT)T = A
4a) (A.B)T = AT.BT
5o) Matriz Diagonal: é a matriz que apresenta todos elementos não pertencente a
diagonal principal nulos. Por exemplo:
20
00
200
020
001
2
0
5
100
010
001
6o) Matriz Triangular

6
6.1) Matriz Triangular Superior: apresenta os elementos abaixo da diagonal principal
nulos. Por exemplo:
700
320
424
ou
7
32
424
6.2) Matriz Triangular Inferior: apresenta os elementos acima da diagonal principal
nulos. Por exemplo:
741
083
004
ou
741
83
4
70) Matriz Ortogonal: Uma matriz real A é ortogonal se, e somente se, o produto dela
pela sua transposta (vice-versa) resultar na matriz identidade: AxAt = At x A = I
80) Matriz Normal Uma matriz real A é normal se, e somente se, o produto dela pela
sua transposta apresenta comutatividade, ou seja, AxAt = At x A.
90) Matriz Simétrica: uma matriz A é simétrica se, e somente se, for igual a sua
transposta At (A = At).
100) Matriz Anti-simétrica: Uma matriz é anti-simétrica, se somente se, sua transposta
for igual a sua oposta (At = -A).
5.0- Igualdade de Matrizes: duas matrizes A e B são iguais se, e somente se, todo
elemento de A é igual ao seu correspondente em B. Observe as matrizes abaixo.
2221
1211
22
2221
1211
22
bb
bb
Be
aa
aa
A
Dizemos que A = B 11
a = 11
b , 12
a = 12
b , 21
a = 21
b e 22
a = 22
b .
7
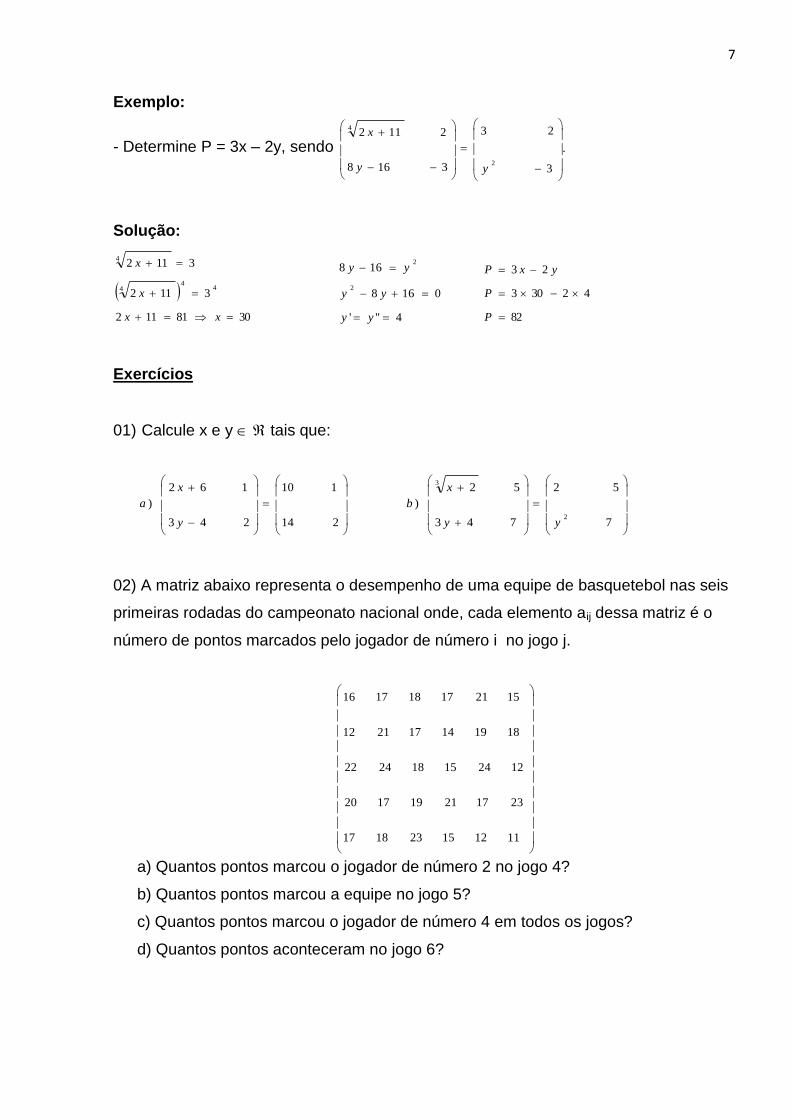
Exemplo:
- Determine P = 3x – 2y, sendo .
3
23
3168
2112
2
4
yy
x
Solução:
3081112
3112
3112
44
4
4
xx
x
x
4"'
0168
168
2
2
yy
yy
yy
82
42303
23
P
P
yxP
Exercícios
01) Calcule x e y tais que:
214
110
243
162
)
y
x
a
7
52
743
52
)2
3
yy
x
b
02) A matriz abaixo representa o desempenho de uma equipe de basquetebol nas seis
primeiras rodadas do campeonato nacional onde, cada elemento aij dessa matriz é o
número de pontos marcados pelo jogador de número i no jogo j.
111215231817
231721191720
122415182422
181914172112
152117181716
a) Quantos pontos marcou o jogador de número 2 no jogo 4?
b) Quantos pontos marcou a equipe no jogo 5?
c) Quantos pontos marcou o jogador de número 4 em todos os jogos?
d) Quantos pontos aconteceram no jogo 6?

8
03) Represente explicitamente cada uma das matrizes:
a) A2x3 tal que aij = 2i – 4j
b) A2x2 tal que aij = (-2)i – 2j
c) A3x3 tal que aij =
ji
jiseji ,2
d) A3x3 tal que aij =
jseji
jiseji
jiseji
,
,
,
04) Determine P = 3x +2y sendo a matriz abaixo (A) simétrica.
.
52
224
232
33
yxx
yx
xx
A
05) Calcule x e y , de modo que:
.2
1253
015120050
)4
2
ordemdeidentidadematrizaigualSeja
x
xx
b
6.0- Adição de Matrizes
Ao somar as matrizes A(aij)mxn e B(bij)mxn , encontramos uma matriz C(cij)mxn tal que:
cij = aij + bij. Observe a operação abaixo.
22222121
12121111
2221
1211
2221
1211
baba
baba
bb
bb
aa
aabb
2
0243
062
)3
2
ordemdenulamatrizaigualSeja
y
xx
a

9
Exemplo: - Dadas as matrizes abaixo, determine:
7256
1253
5642
3454
BeA
a) A + B b) A – B. Solução:
a) A + B =
12898
46107
7256
1253
5642
3454
a) A - B = A + (-B) =
2414
2201
7256
1253
5642
3454
Aplicação:
01- Uma empresa, revendedora de computadores, é composta por duas lojas A e
B. realizado um estudo sobre a aceitação de dois novos modelos de computadores nos
quatro primeiros dias de janeiro, encontrou-se os resultados representados pelas
matrizes A e B acima.
A matriz A representa o desempenho da loja A, sendo aij o número de unidades
vendidas do modelo i no dia j e a matriz B descreve o desempenho da loja B, sendo bij
o número de unidades vendidas do modelo i no dia j. De posse dessas informações,
pergunta-se: Qual a representação matricial da quantidade vendida desses dois
modelos, nas duas lojas, nos 4 dias de janeiro?
Solução:
A + B =
12898
46107
7256
1253
5642
3454
02- Determine o desempenho da loja A em relação à loja B do exemplo anterior.
Solução:
10
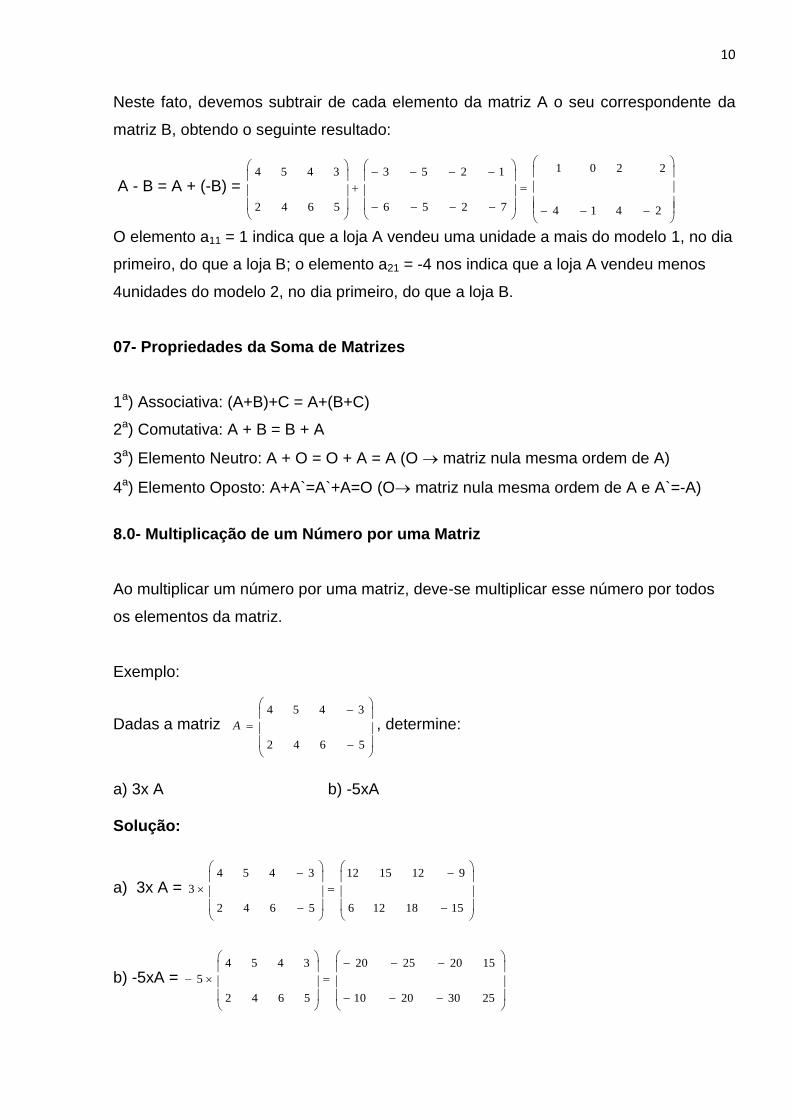
Neste fato, devemos subtrair de cada elemento da matriz A o seu correspondente da
matriz B, obtendo o seguinte resultado:
A - B = A + (-B) =
2414
2201
7256
1253
5642
3454
O elemento a11 = 1 indica que a loja A vendeu uma unidade a mais do modelo 1, no dia
primeiro, do que a loja B; o elemento a21 = -4 nos indica que a loja A vendeu menos
4unidades do modelo 2, no dia primeiro, do que a loja B.
07- Propriedades da Soma de Matrizes
1a) Associativa: (A+B)+C = A+(B+C)
2a) Comutativa: A + B = B + A
3a) Elemento Neutro: A + O = O + A = A (O matriz nula mesma ordem de A)
4a) Elemento Oposto: A+A`=A`+A=O (O matriz nula mesma ordem de A e A`=-A)
8.0- Multiplicação de um Número por uma Matriz
Ao multiplicar um número por uma matriz, deve-se multiplicar esse número por todos
os elementos da matriz.
Exemplo:
Dadas a matriz
5642
3454
A , determine:
a) 3x A b) -5xA Solução:
a) 3x A =
1518126
9121512
5642
3454
3
b) -5xA =
25302010
15202520
5642
3454
5

11
9.0- Multiplicação de Matrizes
O produto de duas matrizes só pode ser realizado se, e somente se, o número de
colunas da primeira for igual ao número de linhas da segunda matriz.
Para realizar a operação, devemos multiplicar cada linha da primeira matriz por
todas as colunas da segunda matriz.
O produto de linha por coluna é realizado da seguinte maneira:
1312
;
11aaa
311321121111
31
21
11
... bababa
b
b
b
Exemplo:
- Dada as matrizes
352
;
31 xA e
4
3
0
13 xB , determine A.B.
352
;
1331 xxBA 3121504.3.3.50.2
4
3
0
A partir desse momento, podemos resolver produto entre duas matrizes, onde, o
número de colunas da primeira tem que ser igual ao número de linhas da segunda
matriz.
- Dadas as matrizes ..mindet,
142
256
253
542
354
33
;
32BAeerBeA
Solução:
142
256
253
542
354;
175016
21579
=1331 xx
BA
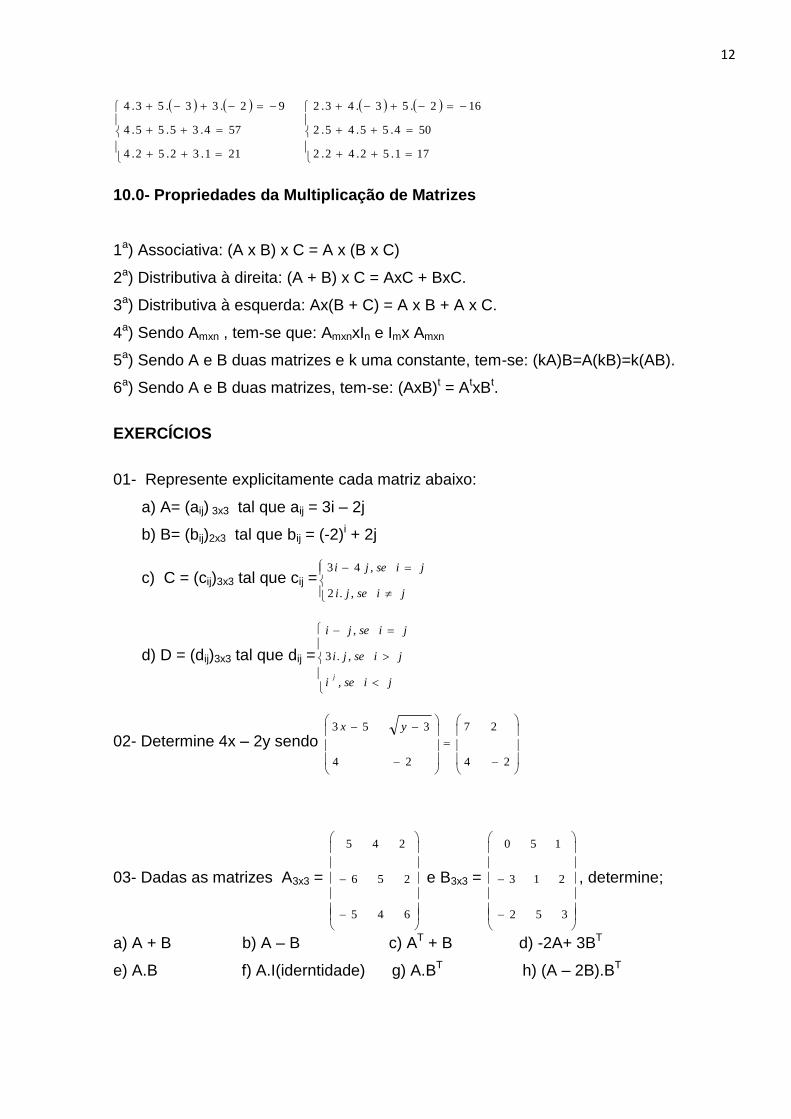
12
171.52.42.2
504.55.45.2
162.53.43.2
211.32.52.4
574.35.55.4
92.33.53.4
10.0- Propriedades da Multiplicação de Matrizes
1a) Associativa: (A x B) x C = A x (B x C)
2a) Distributiva à direita: (A + B) x C = AxC + BxC.
3a) Distributiva à esquerda: Ax(B + C) = A x B + A x C.
4a) Sendo Amxn , tem-se que: AmxnxIn e Imx Amxn
5a) Sendo A e B duas matrizes e k uma constante, tem-se: (kA)B=A(kB)=k(AB).
6a) Sendo A e B duas matrizes, tem-se: (AxB)t = AtxBt.
EXERCÍCIOS
01- Represente explicitamente cada matriz abaixo:
a) A= (aij) 3x3 tal que aij = 3i – 2j
b) B= (bij)2x3 tal que bij = (-2)i + 2j
c) C = (cij)3x3 tal que cij =
jiseji
jiseji
,.2
,43
d) D = (dij)3x3 tal que dij =
jisei
jiseji
jiseji
j,
,.3
,
02- Determine 4x – 2y sendo
24
27
24
353 yx
03- Dadas as matrizes A3x3 =
645
256
245
e B3x3 =
352
213
150
, determine;
a) A + B b) A – B c) AT + B d) -2A+ 3BT
e) A.B f) A.I(iderntidade) g) A.BT h) (A – 2B).BT

13
04- Resolva
645
256
245
x
y
y
x
.
SINTESE DA UNIDADE
A finalidade dessa unidade é permitir que o aluno tenha o conhecimento das
propriedades das matrizes e suas operações.
DETERMINANTES Objetivo de Aprendizagem
- Conceituar determinante.
- Calcular o valor de um determinante através de regras práticas.
- Aplicar determinantes em problemas práticos.
1- Conceito
Determinante de 2a ordem.
- Observe a resolução do sistema abaixo, nas incógnitas x e y.
adac
cpaqy
cpaqycbadaqadyacx
cpbcyacx
aqdycx
cpbyax
Se, o coeficiente de y for diferente de zero (ad – cb 0), haverá apenas uma solução
para o sistema. Então, a expressão ad – cb é cognominada de determinante dos
coeficientes do sistema sendo representada por:
dc
ba
escoeficientdosMatriz

14
bcda
dc
ba
escoeficientdosanteDeter min
Observando a expressão ad – cb, verifica-se que ela surge da diferença do produto dos
elementos da diagonal principal e o produto dos elementos da diagonal secundária,
sendo um determinante de segunda ordem.
Nota:
Matriz é uma arrumação de números (tabela) e o determinante um número associado a
essa tabela.
Exemplo: 1) Calcule o determinante da matriz dos coeficientes de cada sistema abaixo:
a)
125
42
yx
yx
b)
424
323
yx
yx
396
132)
yx
yxc
Solução:
a)
125
42
yx
yx
1545122
25
12
xx
b)
424
323
yx
yx
2862423
24
23
xx
396
132)
yx
yxc
018183692
96
32
xx
2- Determinante de terceira ordem: para resolver determinante de 3ª ordem,
utilizaremos uma regra prática conhecida como REGRA DE SARRUS.

15
Procedimento: Repetimos as duas primeiras colunas (ou as duas primeiras linhas) e, em seguida
subtraímos a soma dos produtos dos elementos das diagonais principais pela soma
dos produtos dos elementos das diagonais secundárias. Da seguinte maneira:
idbhfagechdcgfbiea
hgihg
edfed
bacba
D ............
Exemplo:
- Calcule o valor do determinante dos coeficientes do sistema
3523
21232
23
zyx
zyx
zyx
Solução:
4251221333
223321531
23523
32232
11311
)
xa
5- Teorema de Laplace.
- Esse Teorema orienta a resolução de determinantes de matrizes quadradas de 2a, 3a,
..., enésima ordem. O método consiste em calcular a soma dos produtos dos elementos
de uma fila (linha ou coluna) qualquer pelos respectivos cofatores.
Cofator.
Denominamos cofator do elemento aij o número Aij (lê-se: cofator do elemento aij),
definido por Aij = (-1)i+j.det.B, em que B é a matriz que se obtém eliminando-se a linha i
e a coluna j da matriz em estudo.

16
BA
aaaaa
aaaaa
aaaaa
aaaaa
Aji
ij
nnnjnnn
nj
nj
nj
nm.det.)1(
......
....................................
......
......
......
321
33333231
22232221
11311211
Exemplo:
1- Em relação a matriz abaixo, determine o cofator do elemento a12.
210
023
451
33A
Solução:
Observe que além de eliminarmos a 1a linha e a 2a coluna da matriz A3x3, verificamos
que o valor de i é1 e o de j é 2. Logo, apliquemos a fórmula BAji
ij.det.)1(
cofatorxxA 60023.1
20
03
.1321
12
. Agora que aprendemos calcular cofator, vamos resolver através do Teorema de
Laplace o determinante da matriz abaixo:
6435
3210
0023
2451
6435
3210
0023
2451
44
AAx
Sempre que for possível escolhe-se uma fila (linha ou coluna) que tenha o maior
número de zeros. Neste caso, escolhemos a 2a linha.
Para resolver esse determinante devemos somar o produto de cada elemento da linha
escolhida, no nosso caso, a segunda, pelo respectivo cofator.

17
40080.280.3
645
320
241
.2
643
321
245
.3.0.0.2.3
6435
3210
0023
2451
23232221
AAAAA
6- Propriedades dos Determinantes
6.1- O determinante de uma matriz triangular (os elementos abaixo ou acima da
diagonal principal são nulos) é igual ao produto dos elementos da diagonal principal.
12621
634
025
001
12621
600
320
451
ou
6.2- Multiplicando uma fila de uma matriz quadrada B por uma constante real K, obtém-
se uma nova matriz k.B tal que detB = det k.B. Por exemplo:
.mindetmindet
26
46
51
)2(232
51
13
23
51
23
51
BdeanteerovezesduasaigualéAdeanteeroqueObserve
AB
6.3- Teorema de Binet
Se A e B são matrizes quadradas de mesma ordem, então, o determinante do
produto das matrizes é igual ao produto dos determinantes das matrizes.
det(A.B) = detA . detB
Ex.: Verifique se a igualdade abaixo é verdadeira.

18
156121312
36
04
36
04
det13
23
51
23
51
det
156
624
1534
det
624
1534
36
04
23
51
:
36
04
det
23
51
det
36
04
23
51
det
Solução
6.4- Teorema de Jacobi
Em uma matriz quadrada A, adicionando-se a uma fila qualquer uma múltipla de
uma fila paralela, obtém-se uma matriz B tal que det A = det B.
BAOnde
gkihg
dkfed
akcba
B
BmatrizaseobtémcolunaaoadicionandekporcolunaandoMultiplica
ihg
fed
cba
A
aa
detdet,
.
.
.
.31
7- Matrizes Inversas
Definição: uma matriz quadrada A de ordem n é inversível se, e somente se, existir
uma matriz B, de mesma ordem, tal que AxB = BxA = In (In é uma matriz identidade
de ordem n)
Notas:

19
1a) Uma matriz quadrada A de ordem n é inversível se, e somente se, det A 0.
2a) Uma matriz quadrada é dita Singular se o seu determinante é nulo. Caso
contrário, dizemos que é uma matriz Não-Singular.
2a) O determinante do inverso de uma matriz é igual a inverso do determinante
dessa matriz.
AA
det
1det
1
Exemplo:
- Dada a matriz
24
11
22 xA :
a) Verifique se é invisível.
b) Caso afirmativo, determine sua inversa.
Solução:
a) 642
24
11
A
- Como o determinante é diferente de zero, verificamos que a matriz apresenta
inversa.
b)
:
dc
ba
24
11
dbca
dbca
2424
10
01
3/13/2024
1
aec
ca
ca
6/16/1124
0
deb
db
db

20
6
1
3
1
6
1
3
1
1A
SINTESE DA UNIDADE
A finalidade dessa unidade é permitir que o aluno tenha o conhecimento sobre
resoluções de determinantes utilizando algumas regras práticas, bem como das
propriedades dos mesmos.
SISTEMAS DE EQUAÇÕES LINEAES
Objetivo de Aprendizagem
- Aplicar os conceitos de determinantes na resolução de sistemas.
- Discutir a resolução de um sistema linear.
- Aplicar sistemas lineares em problemas práticos.
1- Equação Linear: é a equação do 1º grau que pode ser apresentada sob a forma:
a1x1 + a2x2 + a3x3 + ... + anxn = b onde:
te)independen(termoreal constanteb
escoeficient dedenomnadasreais constantesa,...,a,a,a
ingógnitasx..., , x, x,x
n321
n321
Exemplos:
Na equação 3x – 4y + 2z = 6, temos:
teindependentermo6
escoeficient2,4,3
ingógnitaszy,x,
Observe que as equações ax2 – 3y + 7z = 6, x – 3yz + z = 9 e x-1 + y = 3 não são
lineares.

21
2- Solução de uma Equação Linear.
Denomina-se solução de uma equação linear toda ênupla de números tal que
substituindo esses números na equação transformam a mesma numa identidade.
Exemplos
1) Verifique se a terna (ou tripla) (2, 3, 1) é solução da equação x + 3y – 2z = 9.
x + 3y – 2z = 9
2 + 3.3 -2.1=9
9 = 9 (V)
2- Verifique se a (-1, 2, 4, 0) é solução da equação 2x + 4y – z + 2w = 12.
2x + 4y – z + 2w = 12
2(-1) + 4.2 -4 + 2.0 = 12
-2 + 8 – 4 = 12
2 = 12 (F)
3- Quantas soluções tem a equação -2x + 3y – z = 5.
Para saber quantas soluções têm uma equação linear, devemos dá valores arbitrários,
nesse caso, a duas variáveis e encontrar o valor da terceira.
(2, 0, z) -2.2 + 3.0 – z = 5 z = -9, logo, (2, 0, -9) é solução.
(1, 3, z) -2.1 + 3.3 – z = 5 z = 2 , logo, (1, 3, 2) é solução. Assim por diante.
Em função disso, concluímos que essa equação apresenta várias soluções.
4- A equação 0x + 0y = 3, é possível ou impossível?
A equação é impossível, pois, para qualquer valor adicionado a x ou a y, não torna a
mesma numa identidade.
5- A equação 0x + 0y = 0 é possível ou impossível?
A equação é possível e determinada, pois, para qualquer valor adicionado a x ou a y,
torna a mesma numa identidade.

22
3- Equação Linear Homogênea.
É toda equação linear que apresenta o termo independente nulo.
a1x1 + a2x2 + a3x3 + ... + anxn = 0
Exemplos:
a) 3x – 2y = 0 b) x – 4y + 2z = 0
Nota: toda equação linear homogênea apresenta solução trivial (nula).
4- Sistema de Equações Lineares.
É um conjunto de equações lineares simultâneas, nas mesmas incógnitas. Por
exemplo:
12523
2232
43
zyx
zyx
zyx
5- Solução de um sistema Linear.
É toda solução comum a todas as equações do sistema. Contudo, essa solução pode
não existir.
Exemplo:
- verifique se as ternas (2, -4, 0) e (-1, 5, 2) são soluções do sistema.
3523
21232
23
zyx
zyx
zyx
- Inicialmente, substituímos a terna (2, -4, 0) no sistema.
F
F
V
32
2116
22
30.54.22.3
210.24.32.2
20.342

23
Observa-se que não existe identidade nas 3 equações, logo, a terna (2, -4, 0) não é
solução do sistema.
- Agora, substituímos a terna (-1, 5, 2) no sistema.
V
V
V
33
2121
22
32.55.21.3
212.25.31.2
22.351
Observa-se que existe identidade nas 3 equações, logo, a terna (-1, 5, 2) é solução do
sistema.
Nota: Sistema linear homogêneo é todo sistema que apresenta os termos
independentes das equações nulos.
0523
023
043
zyx
zyx
zyx
Todo sistema linear homogêneo admite solução nula (trivial). No exemplo acima, a
solução é a tripla (0, 0, 0).
6- Classificação de um sistema Linear.
6.1- Sistema possível e determinado (SPD): apresenta uma única solução.
Exemplo:
)3,2(532
5soluçãoúnicaumaapresenta
yx
yx
6.2- Sistema impossível (SI): não apresenta solução. Exemplo:
.
5
633soluçãoapresentanão
yx
yx
24
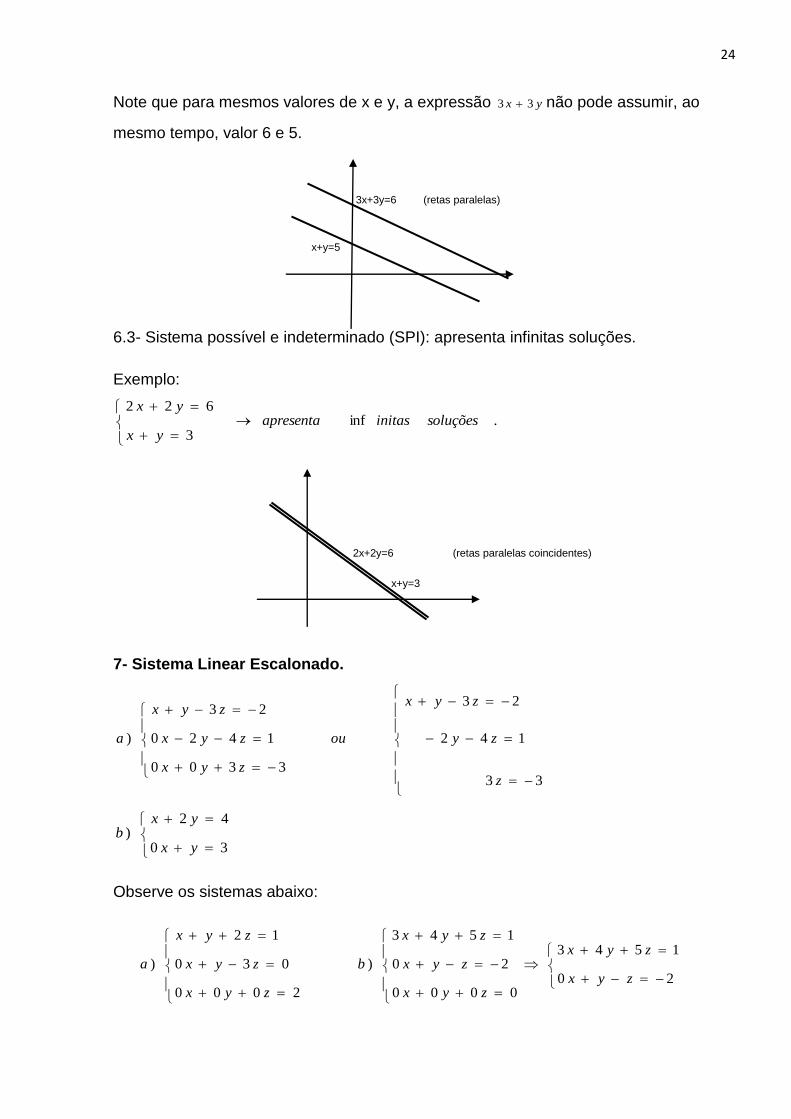
Note que para mesmos valores de x e y, a expressão yx 33 não pode assumir, ao
mesmo tempo, valor 6 e 5.
3x+3y=6 (retas paralelas)
x+y=5
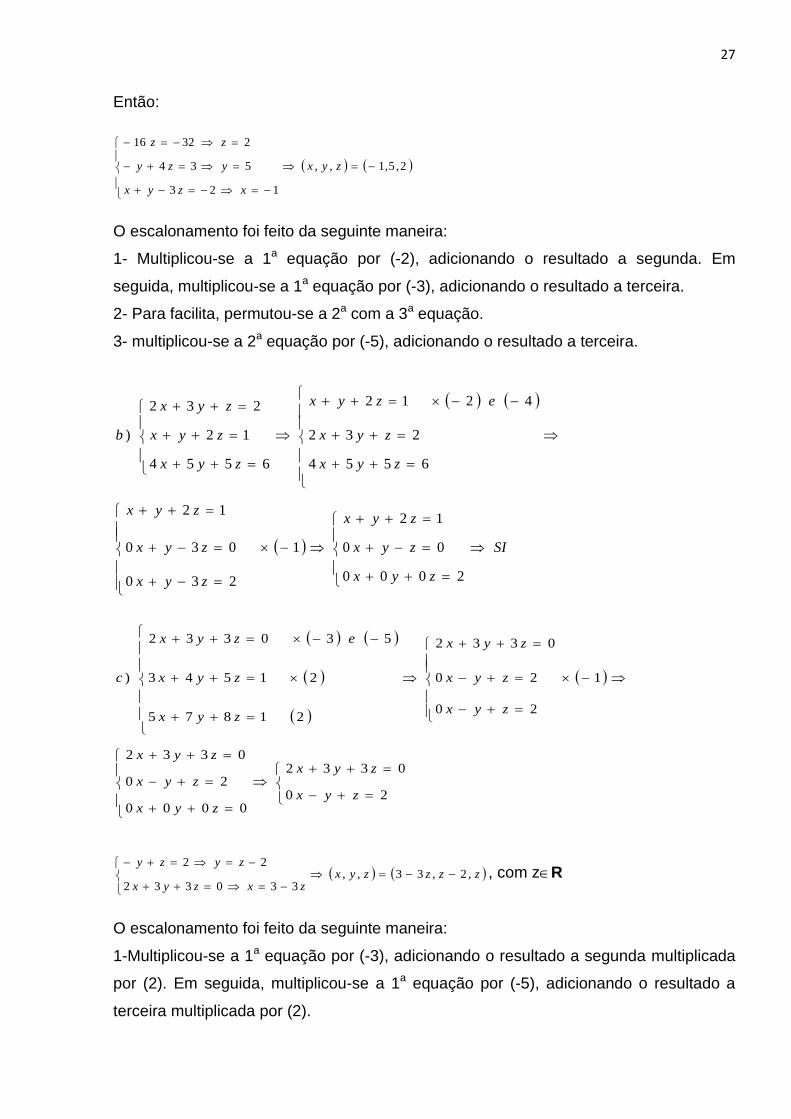
6.3- Sistema possível e indeterminado (SPI): apresenta infinitas soluções.
Exemplo:
.inf3
622soluçõesinitasapresenta
yx
yx
2x+2y=6 (retas paralelas coincidentes)
x+y=3
7- Sistema Linear Escalonado.
33
142
23
3300
1420
23
)
z
zy
zyx
ou
zyx
zyx
zyx
a
30
42)
yx
yxb
Observe os sistemas abaixo:
2000
030
12
)
zyx
zyx
zyx
a
20
1543
0000
20
1543
)zyx
zyx
zyx
zyx
zyx
b

25
No item a, não foi possível o escalonamento, pois os coeficientes da última equação
são nulos, contudo, ao tentar escalonar verificamos que o sistema é impossível.
No item b, como os coeficientes das incógnitas da 3a equação e o termo independente
são nulos, abandonamos essa equação, resolvendo o sistema que é equivalente ao
original.
8- Resolução de um Sistema Linear Escalonado.
8.1- Número de equações igual ao número de incógnitas.
8400
340
113
zyx
zyx
zyx
Solução:
4z = 8 -y – 4z = -3 x + y – 3z = -11 S = {(0, -5, 2)} SPD z = 2 -y – 4.2 = -3 x – 5 – 3.2 = -11 y = -5 x = 0 8.2- Número de equações menor que o número de incógnitas.
14
43
zy
zyx
* Todo sistema linear do tipo 8.2 apresenta pelo menos uma variável livre (variável que
não aparece no início de nenhuma equação do sistema escalonado). No exemplo
acima, por convenção temos z como variável livre, ou seja, pode assumir qualquer
valor real.
14
43
zy
zyx
Resolução:
y – 4z = 1 x + y – 3z = 4 S = {(3-z, 1+4z, z), z }
y = 1+ 4z x +1 + 4z – 3z = 4
x +1 + z = 4
x = 3 – z
Esse tipo de sistema apresenta várias soluções, ou seja, é SPI.

26
Nota: denomina-se grau de indeterminação de um sistema linear do tipo 8.2 o número
de variáveis livres. Nesse caso o grau de indeterminação é 1.
9) Sistemas Lineares Equivalentes (A B).
Dois sistemas lineares são equivalentes se, e somente se, apresentarem o mesmo
conjunto solução.
Exemplo:
Dados os sistemas:
822
42
1624
4
yx
yxBe
yx
yxA
Observe que a solução do A é (4, 0) e do B (4,0), logo, são equivalente (A B).
10- Resolução de um Sistema Linear por Escalonamento. Exemplo: Resolva os sistemas lineares por escalonamento e classifique.
3523
21232
23
)
zyx
zyx
zyx
a
6554
12
232
)
zyx
zyx
zyx
b
1875
1543
0332
)
zyx
zyx
zyx
c
Solução:
3121)3(,)2(
340
17450
23
3523
21232
)3()2(23
)
LLLL
zyx
zyx
zyx
zyx
zyx
ezyx
a
32)5(
321600
340
23
17450
5340
23
LL
zyx
zyx
zyx
zyx
zyx
zyx
27
Então:
2,5,1,,
123
534
23216
zyx
xzyx
yzy
zz
O escalonamento foi feito da seguinte maneira:
1- Multiplicou-se a 1a equação por (-2), adicionando o resultado a segunda. Em
seguida, multiplicou-se a 1a equação por (-3), adicionando o resultado a terceira.
2- Para facilita, permutou-se a 2a com a 3a equação.
3- multiplicou-se a 2a equação por (-5), adicionando o resultado a terceira.
SI
zyx
zyx
zyx
zyx
zyx
zyx
zyx
zyx
ezyx
zyx
zyx
zyx
b
2000
00
12
230
1030
12
6554
232
4212
6554
12
232
)
20
0332
0000
20
0332
20
120
0332
21875
21543
530332
)
zyx
zyx
zyx
zyx
zyx
zyx
zyx
zyx
zyx
zyx
ezyx
c
zzzzyxzxzyx
zyzy,2,33,,
330332
22
, com zR
O escalonamento foi feito da seguinte maneira:
1-Multiplicou-se a 1a equação por (-3), adicionando o resultado a segunda multiplicada
por (2). Em seguida, multiplicou-se a 1a equação por (-5), adicionando o resultado a
terceira multiplicada por (2).

28
2- multiplicou-se a 2a equação por (-1), adicionando o resultado a terceira.
3- Abandonou-se a 3a equação.
11- Resolução de um Sistema Linear pela Regra de Cramer.
A Regra de Cramer é uma lei que associa a resolução de sistemas de equações
lineares através dos determinantes. O observemos o exemplo abaixo:
- Resolva o sistema abaixo utilizando a Regra de Cramer.:
3523
21232
23
zyx
zyx
zyx
Solução:
Determinamos as matrizes dos coeficientes e das varáveis da seguinte maneira: Mc
(matriz dos coeficientes das incógnitas), Mx (substitui a coluna dos coeficientes da
incógnita x pela coluna dos termos independentes), My (substitui a coluna dos
coeficientes da incógnita y pela coluna dos termos independentes) e Mz (substitui a
coluna dos coeficientes da incógnita z pela coluna dos termos independentes). Calcula-
se o determinante de cada matriz. Em seguida, aplicam-se as seguintes fórmulas:
Mc
Mzze
Mc
Myy
Mc
Mxx ,
523
232
311
523
232
311
. McMc -16
523
2321
312
523
2321
312
. MxMx 16
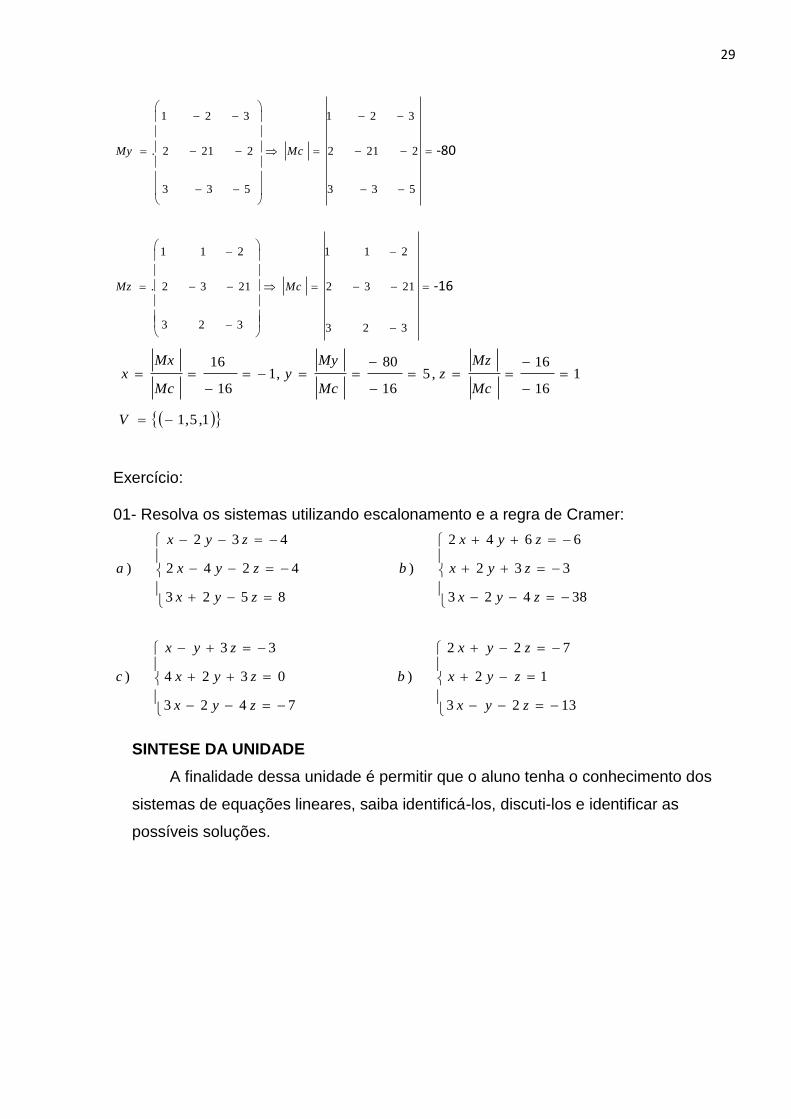
29
533
2212
321
533
2212
321
. McMy -80
323
2132
211
323
2132
211
. McMz -16
1,5,1
116
16,5
16
80,1
16
16
V
Mc
Mzz
Mc
Myy
Mc
Mxx
Exercício: 01- Resolva os sistemas utilizando escalonamento e a regra de Cramer:
8523
4242
432
)
zyx
zyx
zyx
a
38423
332
6642
)
zyx
zyx
zyx
b
7423
0324
33
)
zyx
zyx
zyx
c
1323
12
722
)
zyx
zyx
zyx
b
SINTESE DA UNIDADE
A finalidade dessa unidade é permitir que o aluno tenha o conhecimento dos
sistemas de equações lineares, saiba identificá-los, discuti-los e identificar as
possíveis soluções.

30
UNIDADE IV
ESPAÇOS VETORIAIS
Objetivo de Aprendizagem
- Definir espaços vetoriais.
- Identificar um espaço vetorial aplicando os axiomas.
- Definir subespaço vetorial.
- Conceituar Combinação Linear.
1- Introdução
- Sabe-se que o conjunto R2 = {(x, y) / x,y R} representa geometricamente o plano
cartesiano, onde o par (x, y) pode ser a representação de um ponto e, nesse caso, x
e y são coordenadas, ou pode ser a representação de um vetor e, nesse caso, x e y
são componentes (ou coordenadas). O conjunto R3 = {(x, y, z) / x,y,z R}
representa geometricamente o espaço tridimensional. Acima de 3 perde-se a visão
geométrica de espaços, contudo, podemos trabalhar com a idéia de espaços como
R4 (quarta dimensão), R5 (quinta dimensão), ..., Rn (enésima dimensão).
Rn = {(x1, x2, x3, ..., xn) / xi R}
Para trabalhar no espaço Rn utiliza-se, como espelho, os espaços R2 e R3. Observe: u = (x1, x2, x3, ..., xn) e v = (y1, y2, y3, ..., yn) vetores em Rn e k um escalar.
a) u = v se, e somente se, x1 = y1, x2 = y2, x3 = y3, ..., xn = yn.
31
b) u + v = (x1 + y1, x2 + y2, x3 + y3..., xn + yn)
c) k.u = (kx1, kx2, kx3, ..., kxn)
d) u x v = (x1 x y1, x2 x y2, x3 x y3, ..., xn x yn)
e) 22
3
2
2
2
1...
nxxxxuuu
Nota: o vetor u = (x1, x2, x3, ..., xn) pode surgir com a notação matricial.
n
n
x
x
x
u...
2
1
1 ( matriz coluna)
2- Definição:
Todo conjunto V, cujos elementos são vetores, não-vazio, sobre o qual estão
definidas as operações adição e multiplicação por um escalar (u. v V, u + v V e t
R, u V, tu V) é denominado espaço vetorial real quando verificados os
seguintes axiomas:
A) Em relação à adição:
A1) (u+v)+w = u+(v+w), u,v,w V
A2) u+v = v+u, u,v V
A3) 0 V, u V, u + 0 = u
A4) u V, (-u) V, u + (-u) = 0
B) Em relação à multiplicação por escalar:
B1) (tp)u=(tp)(x1, y1)=((tp)x1, (tp)y1)=(t(px1),t(pky1))
(tp)u= t(px1, py1)=t(p(x1, y1))
(tp)u=t(pu)
B2) (t+p)u=(t+p)( x1, y1)=((t+p)x1, (t+p)y1)=(tx1+px2,ty1+py1)
(t+p)u=(tx1+ty1, px1+py1)=t(x1+y1) + p(x1+y1)
(t+p)u = tu + pu
B3) t(u+v) = t((x1, y1)+ (x2, y2)) = t(x1+ x2, y1+ y2) =(t(x1+ x2), t(y1+ y2))
t(u+v) = t(x1, y1) + t(x2, y2)
t(u+v) = tu + tv
B4) 1u = 1(x1, y1) = (1x1,1y1) = (x1, y1)
1u = u

32
Exemplos:
1- Verifique se V = {(x, y) R2 / y = /x/} é um espaço vetorial.
Escolhemos dois vetores arbitrários u = (x1, /x1/) e v = (x2, /x2/) e verificamos as
operações de adição e multiplicação por um escalar.
a) u + v = (x1, /x1/) + (x2, /x2/) = (x1 + x2, /x1/ + /x2/)
*Observe que x1, x2, y1 e y2 são reais, logo (x1 + x2) ϵ R e (/x1/ + /x2/) ϵ R.
Então, por enquanto, V é um espaço vetorial.
b) t.(x1, /x1/) = (tx1, t/x2/),
* Sendo t um número real, então, tx e t/x2/ também são reais. Portanto, o
conjunto V = {(x, y) R2 / y = /x/} é um espaço vetorial.
Utilizando o exemplo acima, verificaremos os oito axiomas de espaço vetorial.
A1) Associativa da adição
(u+v)+w = [(x1, y1) +(x2, y2)] + (x3, y3) = [(x1+ x2, y1+ y2)] + (x3, y3) = [(x1+ x2) + x3,
(y1+ y2) + y3] = [x1 + (x2 + x3), y1 + (y2+ y3)] = (x1, y1) + [(x2, y2) + (x3, y3)] =
u + (v+w)
A2) Comutativa da Adição
u + v = (x1, y1) + (x2, y2) = (x1 + x2, y1 + y2)
v + u = (x2, y2) +(x1, y1) (x2 + x1, y2 + y1)
Como, x1 + x2 e y1 + y2 são reais, então, x2 + x1 e y2 + y1 também são reais, logo,
u + v = v + u.
A3) Elemento Neutro
0 = (0, 0) R2, u = (x1, y1) R2 tal que:
u + 0 = (x1, y1) + (0, 0) = (x1 + 0, y1 + 0) = (x1, y1) = u
A4) Elemento Simétrico
u = (x1, y1) R2, (-u) = (-x1, -y1) R2 tal que, u + (-u) = 0.
u + (-u) = (x1, y1) + (-x1, -y1) = (x1 - x1, y1 - y1) = (0, 0)
B1) ()u=()(x1, y1)=[()x1, ()y1] = [(x1), (y1)] = (x1, ky1)= [ (x1, y1)]
= (u)
33
B2)(+)u=(+)(x1,y1)=((+)x1,(+)y1)=(x1+x2,y1+y1)=(x1+y1,x1+y1) =
= (x1+y1) + (x1+y1) = u + u
B3) (u+v) = ((x1, y1)+ (x2, y2)) =(x1+ x2, y1+ y2) =((x1+ x2), (y1+ y2)) = (x1, y1)
+ (x2, y2) = u + v
B4) 1u = 1(x1, y1) = (1x1,1y1) = (x1, y1)
1u = u
Logo, V = R2 é um espaço vetorial.
2- Verifique se o conjunto V ={(x, y) R2 / x2 0} é um espaço vetorial.
Sejam v1(x1, y1) e v2(x2, y2) dois elementos pertencentes ao conjunto V.
a) v1 + v2 = (x1, y1) + (x2, y2) = (x1 + x2, y1+ y2)
Observe que x1 e x2 são reais positivos e não nulo, logo: (x1 + x2) ϵ R+* e (y1 + y2) ϵ
R. Por enquanto, V é um espaço vetorial.
b) t.u = t(x1, y1) = tx1 + ty1
t R, logo, tx1 R, portanto, tx1 pode assumir valor negativo. Então, concluímos
que V ={(x, y) R2 / x2 0} não é um espaço vetorial.
3- Verifique se o conjunto dos números inteiros constitui um espaço vetorial.
V = {(x, y) R2 / x, y Z}
a) u + v = (x1, y1) + (x2, y2) = (x1 + x2, y1 + y2)
Note que a soma de dois inteiros gera um inteiro, portanto, por enquanto temos
um espaço vetorial.
b) t.v = t.(x, y) = (tx, ty).
* Sendo t um número real, então, tx e ty também são reais. Portanto, o conjunto V
= Z não é um espaço vetorial, pois t pode assumir valor decimal, como por
exemplo, t = 0,7.
3- Subespaços vetoriais
Definição:
- Entende-se por subespaço vetorial S, ao subconjunto S não-vazio do espaço
vetorial V, onde S é um espaço vetorial em relação à adição e à multiplicação por
escalar definidas em V.

34
- É relevante citar que todo espaço V admite pelo menos dois subespaços vetoriais:
o subespaço nulo {0} e o próprio espaço vetorial V. Esses dois subespaços são
chamados subespaços triviais.
Exemplos:
1- Dados os conjuntos V = R2 e S = {(x, y) R2/ y = 3x}. Verifique se S é um subespaço
de V.
a) V(0, 0) → x = 0, y = 3.0 = 0
* Observe que S é não-vazio, logo, (0, 0) pertence a S. Por enquanto é subespaço
vetorial.
b) u = (x1, 3x1) e v = (x2, 3x2) vetores arbitrários pertencentes a S.
b.1) u + v = (x1, 3x1) + (x2, 3x2) = (x1 + x2, 3x1+ 3x2) = (x1 + x2, 3(x1 + x2)).
* Observe que a segunda componente da soma é igual ao triplo da primeira, logo, (x1 +
x2, 3(x1 + x2)) pertence a S. Por enquanto é um subespaço vetorial.
b.2) t.u = t.( x1, 3x1) = (tx1, t3x1) = (tx1, 3(tx1)).
* Observe que a segunda componente de t.u é igual ao triplo da primeira, logo, (tx1,
3(tx1)) pertence a S.
Portanto, S = {(x, y) R2/ y = 3x} é um subespaço de R2.
y = 3x
Os pontos (x, y) que pertencem à reta formam o subconjunto de V.

35
2- Verifique se S = {(x, y) R2 / y = 3./x/} é um subespaço de V = R2.
a) Inicialmente verificamos que (0, 0) S, pois se x = 0, y = 3./0/ =0
b) u = (x1, 3/x1/) e v = (x2, 3/x2/)
u + v = (x1, 3/x1/) + (x2, 3/x2/) = [(x1 + x2) , (3/x1/ + 3/x2/)] = [(x1 + x2) + 3(/x1/ + /x2/)]
Observe que (x1 + x2) e 3(/x1/ + /x2/) R. Por enquanto, S é um subespaço vetorial de
V.
c) tu = t(x1, 3/x1/) = u = (tx1, t.3/x1/)
Observe que, tanto tx1, como t.3/x1/ pertencem aos reais, logo, S não é um subconjunto
de V, em virtude de t.3/x1/ assumir valor negativo, caso t < 0.
3- O conjunto S = {(x, y, 0) / x,y R} é um subespaço vetorial de R3?
a) O(0,0,0) vetor nulo
(x, y, 0) = (0, 0, 0) S. Por enquanto, S é um subespaço vetorial de R3.
b) u(x1, y1, 0) e v(x2, y2, 0)
u + v = (x1 + x2, y1 + y2,0 + 0).
Observe que as 3 componentes x1 + x2, y1 + y2 e 0 + 0 são reais, logo, S continua
sendo subespaço de R3.
c) t.u = t.(x1, y1, 0) = (tx1, ty1, 0).
Note que tx1, ty1, 0 são números reais, logo, afirmamos que S = {(x, y, 0) / x,y R}
é um subespaço vetorial de R3.
4- Verifique se 00,y
xV
yex é um subespaço vetorial de R2.
a) O (0, 0) 2
0
0V R
b)
21
21
2
2
1
1
1
1
2
1
1
1
y
x
y
x
y
x
y
xv
y
xv
y
xe .
Observe que 21
x x e 21
y y são números reais, logo, por enquanto temos um
subespaço vetorial de R2.

36
c)
1
1
1
1
1
1
1
1
t.y
t.x
y
x.v.
y
xv tt
Sendo t.x1 e t.y1 números reais, onde t pode assumir valor negativo, afirmamos que
00,y
xV
yex não é um subespaço de R2.
5- O conjunto S = {(x,y) R2 / y = 6 – 5x} é um subespaço vetorial de R2?
a) O (0, 0) x = 0 e y = 6 – 5.0 = 6.
Observe que S não apresenta o conjunto vazio, portanto, S = {(x,y) R2 / y = 6 – 5x}
não é um subespaço vetorial de R2.
4- Combinação Linear
Dados os vetores v1, v2, v3, ..., vn pertencentes ao espaço vetorial V e os escalares
p1, p2, p3, ..., pn pertencentes aos reais. Dizemos que v é uma combinação linear dos
vetores v1, v2, v3, ..., vn se, e somente se, v = p1.v1 + p2.v2 + p3.v3 + ... + pn.vn.
Exemplo:
1- Considere os vetores v1 = (1, 2 -3) e v2 = (3, -1, 4) pertencentes a R3. Escrever o
vetor v = (0, 5, -2) como combinação linear dos vetores v1 e v2.
Solução:
v = k1v1 + k2v2
(0, 5, -2) = k1(1, 2 -3) + k2(3, -1, 4)
(0, 5, -2) = (k1 + 3 k2, 2 k1 – k2, -3 k1 + 4 k2)
7
5ke
7
15k
5k 4 + k -
5k -k 2
0k 3 + k
2 1
21
2 1
21
Logo, 7
5
7
1521
vvv

37
2- Dados os vetores v = (4, 2) e w = (-2, 3) pertencentes a R2. Escreva o vetor u = (0, 5)
como combinação linear dos vetores v e w.
u = av + bw
(0, 5) = a.(4, 2) + b.(-2, 3)
(0, 5) = (4a, 2a) + (-2b, 3b)
wvuLogo
aa
ba
bb
ba
ba
ba
ba
4
5
16
5,
16/504
524
024
4/5108
1064
024
)2(532
024
3- Considere os vetores v1 = (3, 2 -1), v2 = (4, -1, 5) e v3 = (2, -3, 6) pertencentes a R3.
Escrever o vetor v = (1, , 3, -2) como combinação linear dos vetores v1, v2.e v3.
v = a.v1 + b.v2 + c. v3
(1, , 3, -2) = a. (3, 2 -1) + b. (4, -1, 5) + c. (2, -3, 6)
(1, , 3, -2) = (3a, 2a, -1a) + (4b, -1b, 5b) + (2c, -3c, 6c)
(1, , 3, -2) = (3a + 4b + 2c, 2a –b -3c, -a + 5b + 6c)
-26c + 5b + a-
33c- b- 2a
12c + 4b + 3a
Aplicando Regra de Cramer
331914)45242()201218(
651
312
243
M
38
136148)72154()30246(
652
313
241
Ma
252449)12186()8354(
621
332
213
Mb
26304)16451()10126(
251
312
143
Mc
33
26,
33
25,
33
13
M
Mcc
M
Mbb
M
Maa
Então, v = 33
13 .v1 + .
33
25v2 +
33
26.v3
SINTESE DA UNIDADE
A finalidade dessa unidade é permitir que o aluno identifique um espaço
vetorial utilizando os axiomas, bem como definir subespaço vetorial. Identificar
quando um vetor forma uma combinação linear com outros vetores.
39
TRANSFORMAÇÕES LINEARES
Objetivo de Aprendizagem
- Definir Transformação Linear.
- Identificar se uma aplicação resulta em uma transformação linear.
Introdução
Durante nossos estudos de matemática, verificamos vários tipos de funções
reais. Agora estudaremos um tipo especial de função, onde o domínio e o
contradomínio são espaços vetoriais, razão pela qual essas funções são chamadas
vetorias. O nosso estudo será dirigido, particularmente para as funções lineares, que
serão denominadas de transformações lineares.
Representa-se uma transformação linear T do espaço vetorial V no espaço
vetorial W por T:V W, sendo T uma função e cada vetor v V apresenta apenas
uma imagem w W indicada por w = T(v).
Definição:
- Sejam V e W espaços vetoriais Denominamos de transformação linear de V em W
a função (aplicação) T: V W se:
a) T(u + v) = T(u) + T(v)
b) T(n.u) = nT(u)
u, v V e n R.
Nota: denominamos operador linear sobre V, a transformação linear de V em V.
Nesse caso V = W.
Exemplos:
1- Sejam V = R2 e W = R3 espaços vetoriais. Verifique se a transformação linear T:
R2 R3, T(x, y) = (3x, -2y, x-y) associa vetores v = (x, y) R2 com vetores w = (x,
y, z) R3. Construa o diagrama para 3 vetores pertencentes a v e suas
correspondentes imagens w.
40
Solução:
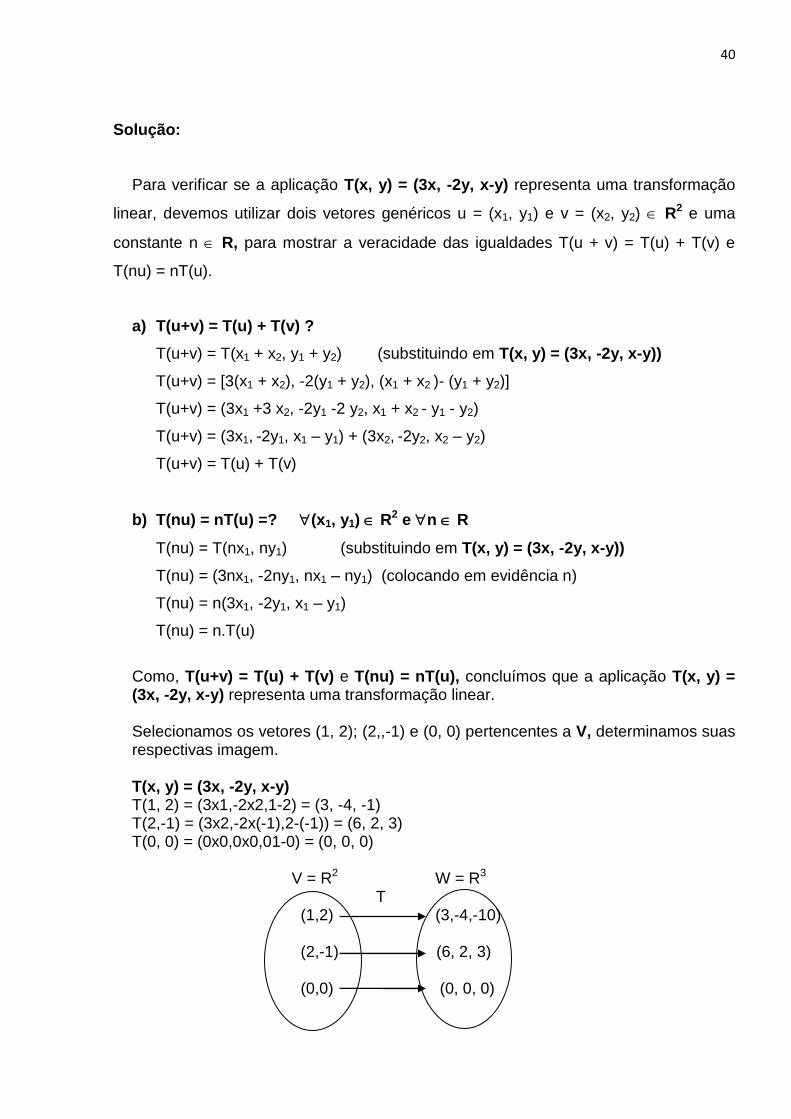
Para verificar se a aplicação T(x, y) = (3x, -2y, x-y) representa uma transformação
linear, devemos utilizar dois vetores genéricos u = (x1, y1) e v = (x2, y2) R2 e uma
constante n R, para mostrar a veracidade das igualdades T(u + v) = T(u) + T(v) e
T(nu) = nT(u).
a) T(u+v) = T(u) + T(v) ?
T(u+v) = T(x1 + x2, y1 + y2) (substituindo em T(x, y) = (3x, -2y, x-y))
T(u+v) = [3(x1 + x2), -2(y1 + y2), (x1 + x2 )- (y1 + y2)]
T(u+v) = (3x1 +3 x2, -2y1 -2 y2, x1 + x2 - y1 - y2)
T(u+v) = (3x1, -2y1, x1 – y1) + (3x2, -2y2, x2 – y2)
T(u+v) = T(u) + T(v)
b) T(nu) = nT(u) =? (x1, y1) R2 e n R
T(nu) = T(nx1, ny1) (substituindo em T(x, y) = (3x, -2y, x-y))
T(nu) = (3nx1, -2ny1, nx1 – ny1) (colocando em evidência n)
T(nu) = n(3x1, -2y1, x1 – y1)
T(nu) = n.T(u)
Como, T(u+v) = T(u) + T(v) e T(nu) = nT(u), concluímos que a aplicação T(x, y) = (3x, -2y, x-y) representa uma transformação linear. Selecionamos os vetores (1, 2); (2,,-1) e (0, 0) pertencentes a V, determinamos suas respectivas imagem. T(x, y) = (3x, -2y, x-y) T(1, 2) = (3x1,-2x2,1-2) = (3, -4, -1) T(2,-1) = (3x2,-2x(-1),2-(-1)) = (6, 2, 3) T(0, 0) = (0x0,0x0,01-0) = (0, 0, 0) V = R2 W = R3 T (1,2) (3,-4,-10) (2,-1) (6, 2, 3) (0,0) (0, 0, 0)
41
2- Verifique se a função T: R R, T(x) = 5x representa uma transformação linear. Vamos utilizar dois vetores u = x1 e v = x2 (nesse caso, são números reais)
quaisquer pertencentes a R para provar as igualdades. a) T(u+v) = T(u) + T(v) ?
T(u+v) = T(x1 + x2) (substituindo em T: R R, T(x) = 5x) T(u+v) = 5(x1 + x2) T(u+v) = 5x1 + 5x2 T(u+v) = T(u) + T(v)
b) T(nu) = nT(u) ? u = x1 R e n R T(nu) = T(n.x1) T(nu) = 5.nx1 T(nu) = n(5x1) T(nu) = n.T(u)
Pela veracidade de T(u+v) = T(u) + T(v) e T(nu) = nT(u), concluímos que a
aplicação T: R R, T(x) = 5x representa uma transformação linear.
Nota: o gráfico da transformação linear T: R R, T(x) = 5x representa uma reta que passa na origem, logo, se uma transformação representar uma reta que não passa na origem, dizemos que ela é não linear.
3- Verifique se a função T: R R, T(x) = 2x + 3 representa uma transformação linear.
Vamos utilizar dois vetores u = x1 e v = x2 quaisquer pertencentes a R para provar as igualdades. a) T(u+v) = T(u) + T(v) = ?
T(u+v) = T(x1 + x2) (substituindo em T: R R, T(x) = 2x + 3) T(u+v) = 2(x1 + x2) + 3 T(u+v) = 2x1 + 2x2 + 3 T(u+v) = (2x1 + 3) + 2x2 Obseve que T(u) = (2x1 + 3) e T(v) = (2x2 + 3), logo:
T(u+v) T(u) + T(v)
2x1 + 2x2 + 3 2x1 + 2x2 + 6
42
Pelo resultado, concluímos que a aplicação T: R R, T(x) = 2x + 3 não representa uma transformação linear.
4- A aplicação T: R2 R3; T(x,y) = (x, y, (x + y)) representa uma transformação
linear?
Vamos utilizar dois vetores genéricos u = (x1, y1) e v = (x2, y2) R2 e uma
constante n R, para mostrar que as igualdades T(u + v) = T(u) + T(v) e T(nu) =
nT(u) são verdadeiras.
T(u+v) = T(u) + T(v) = ?
T(u+v) = T(x1 + x2, y1 + y2) (substituindo em T(x,y) = (x, y, (x + y))
T(u+v) = (x1 + x2, y1 + y2, x1 + x2 + y1 + y2)
T(u+v) = (x1 + x2, y1 + y2, (x1 + y1)+ (x2 + y2))
T(u+v) = [x1, y1, (x1 + y1)] + [x2, y2, (x2 + y2)]
T(u+v) = T(u) + t(v)
T(nu) = nT(u) ? (x1, y1) R2 e n R
T(nu) = T(nx1, ny1) (substituindo em T(x, y) = (3x, -2y, x+y))
T(nu) = (3nx1, -2ny1, nx1 – ny1) (colocando em evidência n)
T(ku) = n(3x1, -2y1, x1 – y1)
T(ku) = n.T(u)
Pela veracidade de T(u+v) = T(u) + T(v) e T(nu) = nT(u), concluímos que a
aplicação T: R2 R3; T(x,y) = (x, y, (x + y)) representa uma transformação linear.
5- A aplicação T: R3 R2; T(x, y, z) = (x + y, y + 1), representa uma transformação
linear?
Solução:
Vamos utilizar dois vetores genéricos u = (x1, y1, z1) e v = (x2, y2, z2) R3 e uma
constante n R, para mostrar que as igualdades T(u + v) = T(u) + T(v) e T(nu) =
nT(u) são verdadeiras.
T(u+v) = T(u) + T(v) = ?
T(u+v) = T(x1 + x2, y1 + y2, z1 + z2) (substituindo em T(x,y) = (x + y, y + 1))
T(u+v) = (x1 + x2, y1 + y2, y1 + y2 + 1)
T(u+v) = (x1, y1, y1) + (x2, y2, y2 + 1)

43
T(u+v) ≠ T(u) + t(v), logo:
A aplicação T: R3 R2; T(x, y, z) = (x + y, y + 1), neste caso, não transforma R3
em R2.
Obs.: Numa transformação linear, quando o vetor nulo gera outro vetor nulo, acontece
a transformação, caso as igualdades T(u+v) = T(u) + T(v) e T(nu) = nT(u), forem
confirmadas. Contudo, se o vetor nulo não gerar outro vetor nulo, podemos afirmar que
não existe transformação linear, sem precisar mostrar as igualdades.
SINTESE DA UNIDADE
A finalidade dessa unidade é permitir que o aluno identifique a existência de uma
transformação linear utilizando as igualdades T(u+v) = T(u) + T(v) e T(nu) = nT(u).
Saudações Educacionais,
Anicio Bechara arero.
BIBLIOGRAFIA BÁSICA:
CALLIOLI, Carlos A. – Álgebra Linear e Aplicações. São Paulo: Atual, 1978
IEZZI, Gelson; DOLCI, Olvaldo; MURAKAMI, Carlos – Fundamentos de Matemática
Elementar – 7. ed. - São Paulo: Atual, 1981
NOBLE, Ben e James, W. Daniel – Álgebra Linear Aplicada. Rio de Janeiro: Prentia-Hall do
Brasil Ltda., 1986
STEINBRUCH, Alfredo. - Álgebra Linear. 2.ed. – As~Paulo: McGraw-Hill, 1987.
Recommended

















