Embed Size (px)
DESCRIPTION
A - 1deteccao de Estruturas de Modelos Narmax Polinomiais a Taxa de Redução de Erro Multiobjetivo
Citation preview

1605
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
ISBN: 978-85-8001-069-5
DETECCAO DE ESTRUTURAS DE MODELOS NARMAX POLINOMIAIS: A TAXADE REDUCAO DE ERRO MULTI-OBJETIVO (MERR)
Samir Angelo Milani Martins∗, Erivelton Geraldo Nepomuceno†, Marcio Falcao SantosBarroso†
∗Programa de Pos-Graduacao em Engenharia EletricaUniversidade Federal de Minas Gerais - Av. Antonio Carlos 6627, 31270-901
Belo Horizonte, MG, Brasil
†GCoM – Grupo de Controle e Modelagem, Departamento de Engenharia EletricaUniversidade Federal de Sao Joao del-Rei, Praca Frei Orlando 170 - Centro, 36307-352
Sao Joao del-Rei, Minas Gerais, Brasil
Emails: [email protected], [email protected], [email protected]
Abstract— This work presents a new approach to structure detection in NARMAX polynomial models -The Multi-objective Error Reduction Ratio (MERR). It is shown how to obtain a Pareto curve, composed bymodels with different structures considering several informations of the system. As a case-study, a DC-DC buckconverter was identified, and the models were validated using dynamic and static indexes, overcoming the ERRapproach (Error Reduction Ratio). It is noteworthy the innovative purpose of the presented technique, once itquantifies the contribution of each regressor aiming each information of the system.
Keywords— NARMAX models, multi-objective system identification, structure detection, MERR.
Resumo— O presente trabalho apresenta uma nova abordagem para deteccao de estruturas de modelos NAR-MAX polinomiais - a taxa de reducao de erro multi-objetivo (MERR). E mostrado como obter uma fronteirade solucoes eficientes, formada por modelos com estruturas distintas(Pareto de estruturas) considerando diferen-tes informacoes do sistema. A tecnica apresentada foi aplicada na identificacao de um conversor CC-CC buck emostrou-se satisfatoria a luz ındices estaticos e dinamicos, suplantando a ERR (taxa de reducao de erro). Por fim,ressalta-se o carater inovador da tecnica, que quantifica a contribuicao de cada regressor, mediante representacaode diversas caracterısticas do sistema modelado.
Palavras-chave— Modelos NARMAX, identificacao multi-objetivo de sistemas, deteccao de estruturas,MERR.
1 Introducao
A Identificacao de Sistemas e um ramo con-sideravelmente antigo e relevante da ciencia. Ea area do conhecimento que estuda maneiras demodelar e analisar sistemas na tentativa de encon-trar algum padrao em observacoes (Billings, 1980;Aguirre, 2007). Para se identificar um sistema, enecessario propor um modelo que consiga descre-ver as mais diversas caracterısticas do mesmo.
Define-se modelo como o conjunto de hipote-ses sobre a estrutura ou comportamento de umsistema fısico. Do lado matematico, um modelonada mais e do que uma abstracao de um sistemareal expresso por meio de equacoes.
Na Engenharia, essas tecnicas podem ser em-pregadas na identificacao de varios sistemas, comona identificacao de aquecedores eletricos, conver-sores CC-CC, sistemas quımicos, e em outrasareas, como sistemas biologicos, economicos e ou-tros ramos da ciencia.
A literatura esta repleta de tecnicas de Identi-ficacao de Sistemas (Martins et al., 2011; Nepomu-ceno et al., 2007; Johansen, 1996). Sao utilizadasvarias representacoes matematicas e computaci-onais, entre elas, pode-se citar as Redes Neurais,Logica Fuzzy, Modelos NARMAX (Nonlinear Au-toRegressive Moving Average model with eXoge-
nous input), Modelo Baseado em Indivıduos. Arepresentacao NARMAX polinomial possui comopontos positivos o fato de permitir, com relativafacilidade, a incorporacao de informacoes que setem a priori do sistema no modelo. Tais infor-macoes (curva estatica, estabilidade de pontos fi-xos e ganho estatico, por exemplo) podem nao es-tar contidas nos dados dinamicos. Sendo assim, oacrescimo dessas informacoes pode aumentar sig-nificativamente a qualidade do modelo, no que serefere a robustez e representatividade do sistema.
A partir de trabalhos de Johansen (1996)e colaboradores, a area de identificacao de sis-temas comecou a se preocupar com a possibili-dade de utilizar informacoes auxiliares sobre o sis-tema e nao apenas dados na identificacao de siste-mas. Dessa preocupacao, surge uma nova tecnica,chamada de Identificacao Multi-objetivo de Sis-temas (IMS) (Martins et al., 2011; Nepomucenoet al., 2007; Barroso et al., 2007). Contudo, tradi-cionalmente, o uso de informacoes auxiliares se daexclusivamente na consolidada etapa de estimacaodos parametros do modelo, sendo que as principaistecnicas de deteccao de estruturas, etapa ainda emaberto, sao mono-objetivo.
O proposito deste trabalho e apresentar o de-senvolvimento da taxa de reducao de erro multi-objetivo (MERR, do ingles Multi-objective Error

1606
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
ISBN: 978-85-8001-069-5
Reduction Ratio), tecnica multi-objetivo de de-terminacao de estruturas de modelos NARMAXpolinomiais. Tal tecnica e vista como uma ex-pansao da consagrada tecnica mono-objetivo taxade reducao de erro(ERR - Error Reduction Ra-tio). Dessa forma, e apresentada uma metodologiapara obtencao de estruturas que possuem compro-misso com outras informacoes acerca do sistema,que nao somente dinamica.
O restante do artigo esta organizado da se-guinte forma. Na secao 2 sao abordados os con-ceitos preliminares . A secao 3 apresenta a meto-dologia para o desenvolvimento da MERR e con-sequente obtencao dos resultados. A analise e dis-cussao dos resultados sao tratados pela secao 4.Na secao 5 e apresentada a conclusao, alem depropostas para futuras pesquisas.
2 Conceitos Preliminares
2.1 Identificacao de Sistemas
Para se identificar um sistema, e necessario arealizacao de 5 principais etapas, a seguir apresen-tadas (Ljung, 1987).
• Teste Dinamico e Coleta de Dados.
• Escolha da Representacao Matematica a serUtilizada.
• Determinacao da Estrutura do Modelo.
• Estimacao dos Parametros.
• Validacao dos Modelos.
Uma vez obtido um modelo, e necessario ve-rificar se o mesmo apresenta as principais carac-terısticas do sistema. Sendo assim, diferentes tec-nicas de validacao de modelos serao utilizadas nocontexto desse trabalho.
As tecnicas de validacao podem depender daaplicacao do modelo e da quantidade de informa-coes disponıveis sobre o sistema real. No escopodeste trabalho, utilizou-se as seguintes abordagenspara validacao:
1. Predicao livre do modelo.
2. Representatividade da caracterıstica estaticado sistema.
3. Erro quadratico medio estatico e dinamico(RMSE - Root Mean Squared Error).
O ındice RMSE, quando normalizado, podeser expresso por:
RMSE =
√∑Nk=1[y(k)− y(k)]2√∑Nk=1[y(k)− y]2
, (1)
sendo y(k) a simulacao livre do sinal para o casodinamico e o valor estatico de saıda para o casoestatico e y e o valor medio do sinal medido y(k).Este ındice mede o erro em uma unidade de me-dida coerente com os dados reais (Nepomucenoet al., 2007). Geralmente, consideram-se bons mo-delos aqueles que apresentam ındice RMSE nor-malizado menor que a unidade. Isto significa que,em media, o erro quadratico apresentado pelo mo-delo e menor que o erro quadratico dado pela me-dia da serie temporal.
2.2 Modelos NARMAX Polinomiais
Modelos NARMAX (Billings, 1980) descre-vem sistemas nao-linares por meio de equacoes dediferenca, relacionando a saıda atual em combi-nacao das saıdas e entradas passadas. Pode serutilizada para problemas de controle onde o pri-cipal objetivo e encontrar uma descricao simplespara o sistema. Em particular, o modelo NAR-MAX polinomial pode ser representado como:
y(k) = F `[y(k − 1), · · · , y(k − ny), (2)
u(k − 1), · · ·u(k − nu),
e(k − 1), · · · , e(k − ne)] + Ξ(k),
em que y(k) e a saıda, u(k) e a entrada exogena,e e(k) e o sinal de ruıdo. Ξ(k) representa o errode predicao. ny , nu , e ne sao as ordens da saıda,da entrada exogena e do ruıdo, geralmente mo-delado por um processo de media movel. Nestetrabalho, os parametros do modelo foram estima-dos via mınimos quadrados estendidos em que oruıdo e modelado por um processo media movel(MA), estimado pelo resıduo. Tal estimador foiutilizado visando evitar a polarizacao na estima-cao dos parametros. A funcao F ` pode representaruma grande variedade de funcoes, incluindo fun-coes lineares. Neste artigo, F ` e restrita a funcoespolinomiais nao-lineares.
2.3 Conversor CC-CC Buck
Um sistema eletronico de potencia conhecidocomo conversor CC-CC buck foi utilizado comosistema-teste da tecnica aqui desenvolvida. O con-versor CC-CC buck (Figura 1), como o proprionome sugere, e um conversor CC-CC abaixador detensao, que produz um valor medio de tensao nasaıda inferior ao valor medio de tensao de entrada.Pode ser controlado por dispositivo de comutacaodo tipo MOSFET ou IGBT atraves do controleda razao cıclica. Para o sistema estudado foi uti-lizando um MOSFET IRF840. A razao cıclica edefinida como a razao entre o tempo que o inter-ruptor se encontra em conducao e o perıodo decomutacao. Como sinal de chaveamento, utilizou-se um sinal persistentemente excitante PRBS (doingles Pseudo Random Binary Signal ou Sinal Bi-nario Pseudo Aleatorio), com o qual se espera que

1607
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
ISBN: 978-85-8001-069-5
o sistema apresente na saıda sua dinamica nao-linear.
RC
22uF
L
2mHIRF840
120R
D
D
G
S
24VVd+
-
Figura 1: Conversor CC-CC buck.
3 Metodologia
3.1 Definicao do Problema
O problema pode ser exemplificado como arepresentatividade estatica e dinamica de um mo-delo junto a um sistema. Suponha um sistemaque apresente comportamento estatico afim e di-namico nao-linear. Um modelo com estruturanao-linear seria sobre-parametrizado do ponto devista estatico, ao passo que um modelo com es-trutura afim seria sub-parametrizado a luz de seucomportamento dinamico. Claramente observa-seum comportamento conflitante entre os objetivosem questao (erros estatico e dinamico), sendo esteo caso do sistema aqui estudado e apresentado.
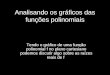
A partir daı surge a definicao de um problemade otimizacao multi-objetivo. As solucoes eficien-tes do problema sao conhecidas como o conjuntoPareto-otimo e consistem de cada ponto da curvaapresentada na Figura 2. Sao as melhores solucoespossıveis de serem obtidas. Nao ha como definira priori, a partir das avaliacoes dos funcionais, seexiste uma solucao melhor que outra.
Objetivo 1
Obj
etiv
o 2
M1
M4
M2
M3
Figura 2: Problema de otimizacao bi-objetivo comobjetivos conflitantes. Os modelos M1 e M4 apre-sentacao as solucoes individuais dos objetivos 1 e2, ao passo que os modelos M2 e M3 sao modelosintermediarios pertinentes a curva.
No ambito da Engenharia Eletrica, mais espe-cificamente em Identificacao de Sistemas, deseja-se obter um modelo que tenha bom comporta-
mento perante as diversas caracterısticas do sis-tema. Em geral, deseja-se minimizar simultanea-mente erros estatico e dinamico.
E difıcil obter um modelo capaz de minimizarsimultaneamente tais erros pois os mesmo sao, emgeral, conflitantes. O que se tem e um problemade otimizacao multi-objetivo e consequentementeum conjunto de solucoes eficientes, que compoemo Pareto-otimo.
A abordagem multi-objetivo e feita em ge-ral durante a etapa de determinacao dos para-metros do modelo (Martins et al., 2011; Nepo-muceno et al., 2007; Barroso et al., 2007). Re-centemente, trabalhos como (Martins et al., 2011;Barbosa, 2010) utilizaram de abordagens multi-objetivo para determinacao de estruturas de mo-delos NARX polinomiais. Contudo, tais traba-lhos nao permitem a quantificacao da contribuicaoindividual de cada regressor quanto da represen-tatividade de uma determinada caracterıstica dosistema.
Alem disso, e importante deixar claro que tec-nicas baseados em erros dinamicos um passo afrente apresentam fragilidade, uma vez que ten-dem a apresentar os termos de y(k − n) para pe-quenos valores de n com maiores ındices (como oındice ERR), uma vez que e o mais apto a explicaro valor de y(k) (Bonin et al., 2010). Outrossim,tais tecnicas se preocupam somente na fidelidadedo modelo a caracterıstica dinamica do sistema,fazendo com que o modelo seja de carater local ede limitada aplicabilidade.
3.2 A Taxa de Reducao de Erro Multi-objetivo(MERR)
Modelos NARMAX polinomiais possuemcomo caracterıstica a se destacar a facil extracaode informacoes acerca do sistema, estimadas pelomodelo. Informacoes como curva estatica, pon-tos fixos, ganhos estaticos e estabilidade podemser extraıdas do modelo, de forma estimada emfuncao dos parametros do modelo:
yq = yq + ξq, (3)
yq = ψq θ + ξq,
sendo yq a informacao do sistema (dados dina-micos de saıda, ponto fixo, curva estatica, ganhoestatico), yq o valor da informacao estimada pelo
modelo, θ o vetor de parametros estimados, ψq amatriz de informacoes e ξq o erro de estimacao dainformacao 1.
Utilizando algoritmos de ortogonalizacao(neste trabalho foram utilizadas transformacoesde HouseHolder), pode-se obter um modelo esti-mador auxiliar em que os regressores pertinentes
1Veja em (Nepomuceno et al., 2007) exemplos de comoestimar algumas informacoes em funcao dos parametros

1608
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
ISBN: 978-85-8001-069-5
a cada informacao ψq sao ortogonais sobre as in-formacoes yq, formando uma base ortogonal as in-formacoes do sistema.
yq =
nθ∑j=1
gjΩjq + ξq, (4)
em que Ωjq e o j-esimo regressor ortogonal a infor-macao yq, gj o parametro ortogonal a ele associadoe nθ o numero de regressores candidatos. A partirdaı, pode-se definir a variancia afim (ou varianciaauxiliar) composta pelo erro de estimacao, comosendo:
var[ξq] = limN→∞
1
N
yTq yq − nθ∑j=1
gj2ΩjTq Ωjq
, (5)
sendo var[ξq] a variancia correspondente a q-esimainformacao afim do sistema e o operador T corres-pondente a transposicao do vetor.
Considerando que nenhum termo fosse acres-centado ao modelo, a variancia afim da i-esima in-formacao auxiliar seria exatamente igual ao qua-drado da informacao do sistema. A cada termoacrescido ao modelo, a variancia afim decresce umvalor de 1
N gj2ΩjTq Ωjq, sendo Ωjq o regressor or-
togonal inserido e gj seu respectivo parametro.Ressalta-se que pode-se tomar a equacao (5) comoum problema de otimizacao mono-objetivo em queo objetivo (funcao custo a ser otimizada) a ser mi-nimizado e a variancia afim.
Objetivando o desenvolvimento de uma tec-nica multi-objetivo, pode-se trabalhar com a com-binacao ponderada convexa de diferentes informa-coes auxiliares do sistema utilizando pesos dife-rentes (ω1, · · · ,ωz), tal que
∑zq=1 ωz = 1, sendo z
o numero de informacoes a serem incorporadas).Nesse sentido, tem-se:
ω1var[ξ1] + · · ·+ ωzvar[ξz] = (6)
ω1 limN→∞
1
N
yT1 y1 − nθ∑j=1
gj2ΩjT1 Ωj1
+ · · ·+ ωz lim
N→∞
1
N
yTz yz − nθ∑j=1
gj2ΩjTz Ωjz
.Rearranjando a equacao (6), tem-se;
ω1var[ξ1] + · · ·+ ωzvar[ξz] = (7)
limN→∞
1
N
ω1
yT1 y1 − nθ∑j=1
gj2ΩjT1 Ωj1
+ · · ·+ lim
N→∞
1
N
ωzyTz yz − nθ∑
j=1
gj2ΩjTz Ωjz
.
Uma vez que pode-se distribuir a variavel ω eque o limite da soma e igual a soma dos limites, aparcela:
limN→∞
1
N
ω1
yT1 y1 − nθ∑j=1
gj2ΩjT1 Ωj1
(8)
+ · · ·+ limN→∞
1
N
ωzyTz yz − nθ∑
j=1
gj2ΩjTz Ωjz
,pode ser reescrita como:
limN→∞
1
N
z∑q=1
ωqyTq yq −
z∑q=1
nθ∑j=1
ωq gj2ΩjTq Ωjq
. (9)
A variancia multi-objetivo composta pelas va-riancias das informacoes do modelo, apresentadana equacao (6), pode ser reescrita como:
z∑q=1
ωqvar[ξq] = (10)
limN→∞
1
N
z∑q=1
ωqyTq yq −
z∑q=1
nθ∑j=1
ωq gj2ΩjTq Ωjq
,ou ainda:
z∑q=1
ωqvar[ξq] = (11)
limN→∞
1
N
z∑q=1
ωq
yTq yq − nθ∑j=1
gj2ΩjTq Ωjq
,em que z ∈ N e o numero de informacoes auxiliaresdo sistema.
A reducao no valor da variancia multi-objetivo pode ser normalizada com relacao ao erroquadratico medio do sinal multi-objetivo com-posto pela combinacao convexa das informacoes aserem incorporadas. Sendo assim, define-se a taxade reducao de erro multi-objetivo (MERR - Multi-objective Error Reduction Ratio), dada pela inclu-sao do j-esimo regressor como sendo:
MERRj =gj
2〈∑zq=1 ωqΩ
jq,∑zq=1 ωqΩ
jq〉
〈∑zq=1 ωqyq,
∑zq=1 ωqyq〉
. (12)
O operador 〈·, ·〉 e o operador produto interno.Pode-se quantificar em porcentagem a contribui-cao de cada regressor ao representar diferentes in-formacoes do sistema em questao. Para se fazerestimativas dos parametros representados em baseortogonal gj , pode-se proceder da seguinte forma:

1609
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
ISBN: 978-85-8001-069-5
gj =〈∑zq=1 ωqΩ
jq,∑zq=1 ωqyq〉
〈∑zq=1 ωqΩ
jq,∑zq=1 ωqΩ
jq〉, j = 1, · · · ,nθ,
(13)
que nada mais e que o metodo dos mınimos qua-drados aplicado a combinacao linear convexa dosregressores ortogonais as informacoes. Destaca-seque os modelos pertinentes a curva Pareto-otimasao obtidos por meio da variacao de ωq, q =1, · · · , z.
Um ponto importante a ser ressaltado e queconsiderando apenas uma informacao a ser incor-porada na equacao (12) e se esta informacao for ainformacao referente aos dados dinamicos, a tec-nica retorna exatamente a ERR (taxa de redu-cao de erro). Neste caso haveria apenas um peso(ω1 = 1) e somente dados dinamicos estariam en-volvidos no processo.
Por fim tem-se que a tecnica apresentada podeser utilizada quando da inclusao de informacoesacerca de pontos fixos, curva estatica, ganho esta-tico e demais informacoes que puderem ser escritasem forma de erro, em funcao dos parametros domodelo. Por questao de espaco, no presente tra-balho somente sera apresentado um exemplo deincorporacao da curva estatica em conjunto comdados dinamicos, na identificacao de um conversorCC-CC buck.
3.3 Analise da Tecnica apresentada - MERR
Apos ser apresentada a tecnica de taxa de re-ducao de erro multi-objetivo, varias analises po-dem ser feitas. A comecar, uma vez que se tratade um problema multi-objetivo onde os objetivosforam combinados de forma ponderada, pode-seretornar exatamente a taxa de reducao de erro.Para tal, basta que o peso referente aos dados di-namicos seja de valor unitario, e os demais pesosnulos. A ERR e amplamente conhecida, estudadae validada na area de Identificacao de Sistemas.
Por outro lado, variando os pesos associadosas informacoes, podem ser obtidos modelos perti-nentes ao conjunto de solucoes eficientes, que in-corporam diversas caracterısticas do sistema. Esteconjunto de solucoes eficientes tambem e conhe-cido de Pareto-otimo, onde estao contidas todas assolucoes nao suplantadas por outras do problemade otimizacao multi-objetivo. Ressalta-se tambemque a diferente combinacao dos pesos pode gerarsolucoes nao eficientes, suplantadas por outras.Uma vez que estas nao representam fielmente osistema, devem ser descartadas e nao fazem partedo conjunto Pareto-otimo.
A multi-objetividade da tecnica apresentadae importante, pois em certos casos somente a uti-lizacao de dados dinamicos nao e suficiente paraa obtencao da estrutura adequada de um modelo.Ademais, alguns sistemas apresentam limitacoes
na coleta de dados dinamicos ou ruıdo nos mes-mos, problemas que podem ser minimizados como desenvolvimento desta tecnica que torna o mo-delo mais global.
A partir daı surge um novo problema, conhe-cido como problema da decisao, que consiste emescolher um modelo, dentre os apresentados pelataxa de reducao de erro multi-objetivo para repre-sentar o sistema em questao. Na literatura exis-tem diversas tecnicas para o criterio de decisao.(Nepomuceno et al., 2007) apresenta uma tecnicade decisao baseada na mınima norma dos obje-tivos normalizados. Dessa forma, garante-se umcompromisso mutuo entre os objetivos considera-dos no problema. Vale observar que apesar de va-rias tecnicas, a escolha do modelo a ser utilizadopode ser objetivada pela aplicacao em questao.
Do ponto de vista computacional, a tecnicaapresenta um baixo custo. Poucos recursos com-putacionais sao necessarios para sua implementa-cao. Ressalta-se o carater multi-objetivo inovadorda tecnica apresentada, uma vez que as princi-pais tecnicas de deteccao de estruturas de mode-los NARMAX polinomiais presentes na literatura,sao de carater mono-objetivo. As poucas tecnicasmulti-objetivos nao se mostram capazes de quan-tificar a contribuicao de cada regressor ao explicardiferentes caracterısticas do sistema.
Todos os processos foram simulados via soft-ware MATLAB R©, utilizando um laptop da marcaASUS R© com 4Gb de memoria RAM, processadorIntel core i3 a 2,27 GHz, executando sistema ope-racional Windows 7 Home Premium R©. Utilizou-se 2 como maximo atraso para regressores de en-trada, saıda e maximo grau de nao-linearidade.
4 Resultados e Discussao
No presente trabalho, alem dos dados dinami-cos, foram incorporados dados estaticos teoricosdo conversor CC-CC buck, que podem ser dadopela equacao 14:
y =4
3vd −
vd3u (14)
em que vd = 24 Volts, u e y sao a entrada e saıdaem regime permanente do sistema. A entrada foivariada de 0 a 10 Volts, em um total de 84 pontos.Os testes dinamicos podem ser vistos pelas Figu-ras 3 e (4), sendo os dados pontilhados utilizadospara identificacao e os dados em linha contınuautilizados para validacao.
Foram obtidos modelos considerando ωd =[0,1; 0,3; 0,7; 0,9] e, consequentemente, ωs =[0,9; 0,7; 0,3; 0,1], sendo que foram incorporadasinformacoes estaticas e dinamicas ponderadas porωs e ωd, respectivamente. Os modelos serao de-nominados de MERRi, sendo i o numero do mo-delo (posicao dos vetores ponderacoes ωd e ωs).

1610
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
ISBN: 978-85-8001-069-5
Figura 3: Testes dinamicos: dados de saıda.
Figura 4: Testes dinamicos: dados de entrada.
As estruturas obtidas para i = 1,2 foram as mes-mas. Contudo, destaca-se que nao necessaria-mente os regressores para estes modelos apresen-taram a mesma taxa de reducao de erro multi-objetivo, pois foram obtidos por meio de diferentesponderacoes. Deste modo, obteve-se um conjuntode 3 modelos com estruturas diferentes, a seguirapresentados.
Ressalta-se que o criterio de informacao deAkaike foi aplicado para determinar o numero deregressores que devem ser inseridos no modelo re-sultando em 9 regressores, e que o modelo dadopara ωd = 1 e ωs = 0 (ERR) tambem foi obtido,para comparacao.
yERR(k) = −0,6867y(k − 1) (15)
−0,3253y(k − 2)− 0,0081y(k − 1)2
−2,8685u(k − 1)2 − 0,0404y(k − 2)2
+0,0593y(k − 2)y(k − 1) + 14,0007
+0,6153u(k − 1)y(k − 1)
+3,2458u(k − 1)
yMERR4(k) = −0,0396y(k − 1) (16)
−1,0472y(k − 2) + 14,0005
−5,6780u(k − 1) + 9,3834u(k − 2)
−2,0313u(k − 2)2
+0,5945u(k − 1)y(k − 1)
+0,0152y(k − 2)2 − 0,8788u(k − 1)2
Tabela 1: Taxa de Reducao de Erro Mono-objetivo - ERR.
ERR Regressor ERR (%)y(k-1) 99,918601y(k-2) 0,040465
y(k − 1)2 0,005679u(k − 1)2 0,014101y(k − 2)2 0,000065
y(k-2)y(k-1) 0,001073C 0,000218
u(k-1)y(k-1) 0,000605u(k-1) 0,000596
Tabela 2: Taxa de Reducao de Erro Multi-objetivo- MERR1.
MERR1 Regressor MERR (%)y(k-1) 99,850869y(k-2) 0,148949u(k-1) 0,000036
C 0,000063u(k-2) 0,000001
y(k − 2)2 0,000001y(k-2)y(k-1) 0,000001y(k − 1)2 0,000003
u(k-2)y(k-2) 0,000002
yMERR3(k) = −0,4849y(k − 1) (17)
+0,1546y(k − 2)− 3,0944u(k − 1)2
+0,3150u(k − 2)2
+1,2441u(k − 2)u(k − 1) + 14,0006
−0,7677u(k − 1)
+0,7952u(k − 1)y(k − 1)
−0,3438u(k − 2)y(k − 2)
yMERR1,2(k) = 1,6168y(k − 1) (18)
−1,1554y(k − 2)− 2,1340u(k − 1)
+13,9972− 2,8396u(k − 2)
−0,0744y(k − 2)2
+0,1519y(k − 2)y(k − 1)
−0,0863y(k − 1)2
+0,2078u(k − 2)y(k − 2)
As Tabelas 1, 2, 3, 4 e 5 representam os regres-sores obtidos para os modelos e suas respectivastaxas de reducao de erro multi-objetivo
As Figuras 5 e 6 apresentam o comportamentoestatico e dinamico dos modelos e do sistema. Jaa Figura 7 apresenta o plano composto pelos ındi-ces RMSE estatico e dinamico. Vale ressaltar osındices foram obtidos via dados de validacao.

1611
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
ISBN: 978-85-8001-069-5
Tabela 3: Taxa de Reducao de Erro Multi-objetivo- MERR2.
MERR2 Regressor MERR (%)y(k-1) 99,820737y(k-2) 0,174741u(k-1) 0,000856
C 0,001604u(k-2) 0,000010
y(k − 2)2 0,000008y(k-2)y(k-1) 0,000037y(k − 1)2 0,000076
u(k-2)y(k-2) 0,000045
Tabela 4: Taxa de Reducao de Erro Multi-objetivo- MERR3.
MERR3 Regressor MERR (%)y(k-1) 99,899770y(k-2) 0,064284
u(k − 1)2 0,001337u(k − 2)2 0,005358
u(k-2)u(k-1) 0,001061C 0,000807
u(k-1) 0,009267u(k-1)y(k-1) 0,000115u(k-2)y(k-2) 0,000323
Tabela 5: Taxa de Reducao de Erro Multi-objetivo- MERR4.
MERR4 Regressor MERR (%)y(k-1) 99,913069y(k-2) 0,042932
C 0,002313u(k-1) 0,017904u(k-2) 0,000103
u(k − 2)2 0,000057u(k-1)y(k-1) 0,001063y(k − 2)2 0,000315u(k − 1)2 0,000291
Figura 5: Comportamento estatico dos modelos edo sistema.
Figura 6: Comportamento dinamico dos modelose do sistema.
1,2ERRBI
4ERRBI
3ERRBI
ERR
Figura 7: Indice RMSE estatico e dinamico dosmodelos.
Observa-se claramente que os objetivos emquestao sao conflitantes. Por outro lado,consegue-se modelos que apresentam uma grandemelhoria quanto da representacao estatica, sob apena de uma pequena piora na representacao dina-mica ou ate mesmo sem nenhuma perda dinamica(modelo MERR4). Com isso, pode-se concluirque ha informacoes nos dados estaticos relevantespara a obtencao da estrutura do modelo. Alemdisso, devido a obtencao do modelo MERR4 quesuplanta o modelo ERR, conjectura-se que ha in-formacao acerca do comportamento dinamico domodelo nos dados estaticos teoricos.
Ponto extremamente relevante e que, a luz dosındices RMSE, o modelo obtido pela classica tec-nica ERR encontra-se dominado, ou seja, existemmodelos que possuem melhor comportamento di-namico e estatico simultaneamente. Isso pode serexplicado, uma vez que o algoritmo ERR e sub-

1612
Anais do XIX Congresso Brasileiro de Automática, CBA 2012.
ISBN: 978-85-8001-069-5
Tabela 6: Validacao dos modelos. O sub-ındice srefere-se a estatico, ao passo que o sub-ındice d serefere a dinamico.
ERR MERR4 MERR3 MERR2,1
RMSEs 1,5824 1,4959 1,1493 0,4930RMSEd 0,3004 0,2935 0,3545 0,4802
otimo.
Por fim, atenta-se ao fato que tecnicas multi-objetivo tendem a aumentar a robustez e globali-dade do modelo, o que e extremamente importanteem problemas de identificacao e controle robusto.
5 Conclusoes
Foi apresentada o desenvolvimento da taxa dereducao de erro multi-objetivo (MERR), tecnicautilizada para deteccao de estruturas de modelosNARMAX polinomiais. Em geral, o que se tem naliteratura sao tecnicas mono-objetivo de deteccaode estruturas, sendo que tais tecnicas nao levamem consideracao informacoes que se tem a priorido sistema.
Foram obtidos um conjunto de modelos, esta-veis, que representam bem o sistema em questao.Observou-se tambem uma grande melhora na re-presentacao da caracterıstica estatica do sistema.Ademais, tais modelos mostram-se mais globais erobustos, por possuırem informacoes da estaticado sistema.
Como pesquisas futuras, pretende-se fazeruma adaptacao ao ındice AIC, de forma que omesmo leve em conta nao somente o objetivo deminimizar o erro dinamico, mas tambem outrascaracterısticas relevantes do sistema. Ademais,pretende-se incorporar um maior numero de infor-macao durante a etapa de deteccao de estruturas,via taxa de reducao de erro multi-objetivo.
Agradecimentos
Os autores agradecem a Fapemig, CNPq, Ca-pes e a Universidade Federal de Sao Joao del-Rei,pelo apoio financeiro.
Referencias
Aguirre, L. A. (2007). Introducao a Identifica-cao de Sistemas: Tecnicas lineares e nao-lineares aplicadas a sistemas reais, Editorada UFMG. 3a edicao.
Aguirre, L. A., Rodrigues, G. G. e Jacome, C.R. F. (1998). Identificacao de sistemas nao-lineares utilizando modelos narmax polino-miais – uma revisao e novos resultados, SBAControle & Automacao 9(2): 90–106.
Barbosa, A. M. (2010). Tecnicas de otimizacao bi-objetivo para a determinacao da estrutura demodelos narx, Master’s thesis, UniversidadeFederal de Minas Gerais.
Barroso, M. F. S., Takahashi, R. e Aguirre, L.(2007). Multi-objective parameter estimationvia minimal correlation criterion, Journal ofProcess Control 17(4): 321–332.
Billings, S. A. (1980). Identification of nonlinearsystems - a survey, IEE Proceedings-D Con-trol Theory and Applications 127(6): 272–285.
Bonin, M., Seghezza, V. e Piroddi, L. (2010).NARX model selection based on simulationerror minimisation and LASSO, IET ControlTheory and Applications 4(7): 1157–1168.
Fung, R.-F., Hsu, Y.-L. e Huang, M.-S. (2009).System identification of a dual-stage xy preci-sion positioning table, Precision Engineering33(1): 71 – 80.
Johansen, T. A. (1996). Identification of non-linear systems using empirical data and priorknowledge - an optimization approach, Auto-matica 32(3): 337–356.
Johansen, T. A. e Babuska, R. (2003). Multi-objective identification of Takagi-Sugenofuzzy models, IEEE Transactions on FuzzySystems 11(6): 847–860.
Ljung, L. (1987). System Identification: Theoryfor the User., Prentice-Hall, London.
Martins, S. A. M., Braga, D. C. S., Nepomu-ceno, E. G., Gomes, T. V. e Reis, M. L. F.(2009). Investigation of the static curve in-formation for multiobjective system identifi-cation, Journal of Computational Interdisci-plinary Sciences 1(2): 149–157.
Martins, S. A. M., Nepomuceno, E. G. e Figuei-redo, J. P. (2011). Deteccao de estruturasde modelos narmax polinomiais: uma abor-dagem inteligente multi-objetivo., Anais doX Simposio Brasileiro de Automacao Inteli-gente, pp. 320–325.
Nepomuceno, E. G., Takahashi, R. H. C. eAguirre, L. A. (2007). Multiobjective pa-rameter estimation for non-linear systems:affine information and least-squares for-mulation, International Journal of Control80(6): 863–871.
Pardalos, P. M., Steponavice, I. e Zilinskas, A.(2011). Pareto set approximation by themethod of adjustable weights and successivelexicographic goal programming, Optimiza-tion Letters pp. 1–14.