Embed Size (px)
Citation preview

Análise dinâmica de vigas sobre fundação elástica sob aação de osciladores móveis
Cristiano Vieira Rodrigues
Dissertação para obtenção do Grau de Mestre em
Engenharia Civil
Orientador(es): Prof. António Manuel Figueiredo Pinto da CostaProf. Fernando Manuel Fernandes Simões
Júri
Presidente: Prof. Luís Manuel Coelho GuerreiroOrientador: Prof. António Manuel Figueiredo Pinto da Costa
Vogal: Prof. Manuel da Cunha Ritto Corrêa
Abril 2016

ii

Resumo
O trabalho desenvolvido ao longo desta dissertacao teve como objetivo o estudo do comportamento
dinamico de vigas finitas apoiadas em fundacoes de diversos tipos, percorridas por osciladores harmoni-
cos simples a velocidade constante, com a finalidade de simular de forma simplificada a passagem de
veıculos. Consideraram-se tres tipos de fundacao: (1) Winkler linear, (2) Winkler nao linear, (3) Win-
kler bilinear. Efetuaram-se estudos exaustivos de pesquisa de velocidades crıticas do oscilador e de
avaliacao de efeitos que um oscilador movel tem sobre deslocamentos e esforcos na viga, deslocamen-
tos e aceleracoes no oscilador e sobre a forca de contacto entre a viga e o oscilador.
Palavras-chave: fundacao visco-elastica, fundacao nao-linear suave, fundacao bilinear, os-
cilador em movimento uniforme
iii

iv

Abstract
The objective of the work developed in the framework of this dissertation was the study of the dynamical
behaviour of finite beams supported by several types of foundation, under the action of uniformly moving
harmonic oscillators, with the purpose of simulation in a simple manner of the passage of vehicles.
Three types of foundation are considered: (1) linear Winkler, (2) nonlinear Winkler, (3) bilinear Winkler.
Exhaustive parametric studies were undertaken for the identification of the oscillator’s critical velocities
and for the evaluation of the effects of an oscillator on the beam’s displacements, on the oscillator’s
displacements and accelerations and on the beam-oscillator contact force.
Keywords: Viscoelastic foundation, smooth nonlinear foundation, bilinear foundation, uniformly
moving oscillator
v

vi

Conteudo
Resumo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iii
Abstract . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . v
1 Introducao 1
2 Dinamica de um oscilador em viga sobre fundacao 5
2.1 Teoria e formulacao do problema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
3 Fundacao linear 13
3.1 Matriz de rigidez elementar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.2 Matriz de massa elementar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.3 Matriz de amortecimento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.4 Integracao no tempo das equacoes do movimento . . . . . . . . . . . . . . . . . . . . . . 15
3.5 Resultados e comentarios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.5.1 Identificacao da velocidade crıtica . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.5.2 Estudos parametricos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
4 Fundacao nao linear 37
4.1 Teoria e formulacao do problema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.2 Dinamica de vigas sobre fundacao elastica nao linear . . . . . . . . . . . . . . . . . . . . 38
4.3 Resultados e comentarios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.3.1 Identificacao da velocidade crıtica . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.3.2 Estudos Parametricos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
5 Fundacao Bilinear 57
5.1 Teoria e formulacao do problema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
5.1.1 Movimentos ascendente do lado esquerdo e descendente do lado direito . . . . . 58
5.1.2 Movimentos ascendente do lado direito e descendente do lado esquerdo . . . . . 59
5.1.3 Movimentos ascendentes laterais e descendente central . . . . . . . . . . . . . . 59
5.1.4 Movimentos ascendente central e descendente laterais . . . . . . . . . . . . . . . 60
5.1.5 Movimento ascendente em todo o vao . . . . . . . . . . . . . . . . . . . . . . . . . 61
5.1.6 Movimento descendente em todo o vao . . . . . . . . . . . . . . . . . . . . . . . . 61
5.2 Resultados e comentarios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
vii

5.2.1 Identificacao da velocidade crıtica . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
5.2.2 Estudos Parametricos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
6 Conclusoes 75
Bibliografia 77
Lista de Tabelas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Lista de Figuras . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
Lista de Sımbolos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
viii

Capıtulo 1
Introducao
A interacao entre estruturas elasticas e sistemas mecanicos moveis tem sido objeto de estudo ha mais
de um seculo e, atualmente, o desenvolvimento dos sistemas de transporte de alta-velocidade tem
despertado um maior interesse neste domınio. Os comboios de alta velocidade atuais conseguem
atingir velocidades comparaveis a mınima velocidade de fase de ondas do sistema viga-fundacao para
alguns tipos de solos (Metrikine e Verichev, 2001), provocando vibracoes cujas amplitudes podem ser
significativamente maiores que a flecha provocada por uma carga estatica. Estas vibracoes podem
danificar as estruturas de suporte e influenciar o conforto e seguranca de passageiros ou operadores.
Amplitudes de vibracao elevadas podem tambem ocorrer noutros problemas de engenharia, como por
exemplo em maquinagem de precisao de alta velocidade, em sistemas de propulsao avancados ou em
cabos de transporte (Yang et al., 2000). Torna-se portanto relevante estudar a resposta dinamica de
estruturas atuadas por sistemas mecanicos moveis.
Os carris sao normalmente representados por um viga finita ou infinita sobre uma fundacao uniforme
ou nao uniforme viscoelastica linear ou nao linear. Numerosos estudos anteriores utilizaram varios
modelos de fundacao, salientando-se os de Winkler, Pasternak, Vlasov ou Reissner. O modelo de
carril mais utilizado e o de viga de Euler-Bernoulli, mas em alguns estudos tambem se usa o modelo
de Timoshenko. Relativamente ao sistema movel, na literatura consideram-se tres tipos diferentes de
modelos: (i) oscilador movel (mola-massa-amortecedor), que se considera quando a rigidez do sub-
sistema movel e finita e os efeitos de inercia nao sao desprezaveis; (ii) massa movel, que e um sub-
caso do problema do oscilador movel quando a rigidez do sistema movel tende para o infinito; (iii) carga
movel, que despreza a inercia do sistema movel.
A nao linearidade do problema da massa movel ou oscilador movel coloca dificuldades que nao
existem para o problema da carga movel. Na literatura podem-se encontrar muitos exemplos de como
estas dificuldades foram ultrapassadas. Hutton e Counts (1974) usaram uma serie de senos para a
aproximacao espacial da flecha da viga e resolveram numericamente o sistema de equacoes diferen-
ciais ordinarias de segunda ordem dependente do tempo assim resultante. Stanisic (1985) apresentou
um metodo aproximado baseado numa expansao da flecha da viga em serie de funcoes proprias com
coeficientes dependentes do tempo. No trabalho de Sadiku e Leipholz (1987) utilizou-se uma versao
1

alternativa: os autores propuseram uma aproximacao com a funcao de Green do problema da carga
movel em viga finita, chegando a uma equacao integro-diferencial em termos do deslocamento da viga,
cuja solucao pode ser obtida para qualquer nıvel de precisao desejado. Lee (1996) investigou o inıcio
da separacao entre a massa movel e a viga usando o metodo da analise modal e resolveu um conjunto
de equacoes diferenciais ordinarias acopladas atraves de um esquema de Runge-Kutta de quinta or-
dem. Duffy (1990) obteve solucoes analıticas para o caso de uma viga infinita atuada por uma carga
movel harmonica ou por uma massa movel, utilizando a transformada de Fourier e a transformada de
Laplace. A estabilidade da oscilacao da massa movel com velocidade constante ao longo de uma
viga infinita de Euler-Bernoulli foi estudada por Denisov et al. (1985) e Metrikine e Dieterman (1997).
Em ambos os trabalhos provou-se que, para alem da ressonancia que ocorre quando a velocidade
da massa movel iguala a velocidade de fase mınima de ondas do sistema viga-fundacao, tambem po-
dem ocorrer instabilidades dinamicas provocadas por ondas Doppler anomalas irradiadas pelo objeto
movel. Estas instabilidades sao caraterizadas por vibracoes do sistema cuja amplitude cresce expo-
nencialmente no tempo. A regiao de instabilidade do sistema foi determinada com a ajuda do metodo
da decomposicao-D. A mesma tecnica foi empregue por Wolfert et al. (1998) no estudo da estabili-
dade de duas massas moveis com velocidade constante ao longo de uma viga de Euler-Bernoulli sobre
fundacao visco-elastica.
O problema do oscilador movel tambem ja foi objeto de estudo. Pesterev e Bergman (1997a) e Pes-
terev e Bergman (1997b) consideraram uma viga finita elastica linear atuada por um oscilador movel
nao amortecido e propuseram a formulacao matematica que permitiu obter a solucao do problema
de interacao numa serie de funcoes proprias do sistema elastico; os coeficientes da expansao (de-
pendentes do tempo) obtiveram-se resolvendo um conjunto de equacoes diferenciais ordinarias linea-
res. Uma extensao posterior do metodo incorporou amortecimento proporcional (Pesterev e Bergman,
1998). Baseados na metodologia anterior, Omenzetter e Fujino (2001) estudaram as vibracoes de
um oscilador movel linear com varios graus de liberdade com amortecimento viscoso e interagindo
com a viga em varios pontos de contacto. De um modo semelhante a metodologia utilizada por Sa-
diku e Leipholz (1987), Yang et al. (2000) analisaram um oscilador movel mola-massa, resolvendo por
integracao numerica a equacao integral final do deslocamento da viga. Bitzenbauer e Dinkel (2002)
utilizaram transformadas de Fourier, para as variaveis no espaco e tempo, para determinar a resposta
dinamica de um sistema movel linear com varios graus de liberdade movendo-se ao longo de uma viga
infinita; o sistema foi excitado por imperfeicoes verticais do caminho tendo as suas condicoes iniciais
sido admitidas como nulas. Muscolino e Palmeri (2007) estudaram a resposta de vigas sobre fundacao
viscoelastica atuadas por osciladores moveis. Metrikine e Verichev (2001) investigaram a estabilidade
de um oscilador movel com velocidade constante percorrendo uma viga infinita de Timoshenko sobre
fundacao elastica e determinaram os domınios de instabilidade no espaco dos parametros do sistema
empregando tambem o metodo de decomposicao-D. Posteriormente, tambem estudaram a estabilidade
de um bogie movel (Verichev e Metrikine, 2002). O metodo de Galerkin tambem ja foi aplicado de forma
a reduzir as equacoes diferenciais parciais do deslocamento a um conjunto de equacoes diferenciais
ordinarias contendo coeficientes periodicos que foram resolvidas numericamente. Esta metodologia
2

foi utilizada por Yoshimura et al. (1986) para uma viga simplesmente apoiada atuada por um oscilador
movel incluindo efeitos geometricos nao lineares, por Katz et al. (1987) para uma viga simplesmente
apoiada atuada por uma carga movel variavel cuja amplitude e dependente da flecha, e por Ding et al.
(2014) no estudo da resposta dinamica de um sistema acoplado oscilador-pavimento modelando o pavi-
mento como uma viga de Timoshenko sobre uma fundacao nao linear com seis parametros. O metodo
dos elementos finitos (MEF) tambem foi usado para obter a resposta dinamica de vigas sobre fundacao
elastica atuadas por osciladores moveis. Hino et al. (1985) estudou a vibracao de vigas nao lineares
finitas atuadas por oscilador movel utilizando o MEF e o algoritmo de Newmark de integracao implıcita
no tempo. Lin e Trethewey (1990) apresentaram uma formulacao MEF para a analise dinamica de vi-
gas elasticas atuadas por sistemas moveis mola-massa-amortecedor de um e dois pontos de contacto.
Chang e Liu (1996) usaram tambem uma abordagem do tipo MEF, para analisar a vibracao de vigas
nao lineares sobre fundacao elastica atuadas por um oscilador movendo-se num perfil de viga com uma
variacao aleatoria ao longo do eixo.
Na presente dissertacao utiliza-se o metodo dos elementos finitos no estudo da resposta transversal
transitoria de vigas de Euler-Bernoulli simplesmente apoiadas sobre fundacao viscoelastica atuadas
por osciladores moveis. O oscilador move-se com velocidade constante ao longo do eixo da viga.
Estuda-se a resposta do sistema para tres comportamentos mecanicos da fundacao: (a) linear elastico
(modelo de Winkler classico), (b) elastico nao linear (a reacao da fundacao tem dependencia cubica
do deslocamento da viga) e (c) elastica bilinear (com rigidez diferente a tracao e a compressao). O
metodo dos elementos finitos e uma alternativa mais simples e pratica aos metodos analıticos utilizados
nos trabalhos referidos acima, pois permite a resolucao (aproximada) de problemas nao lineares para
os quais nao existe uma solucao analıtica. Estuda-se o efeito da frequencia natural e velocidade do
oscilador e da rigidez e amortecimento da fundacao; os resultados obtidos sao sempre que possıvel
validados pela comparacao com a literatura. Em particular, sao determinadas as velocidades crıticas
do oscilador e a gama de velocidades para as quais existe instabilidade dinamica.
A dissertacao esta dividida em quatro partes. No Capıtulo 2 apresenta-se o modelo para o es-
tudo do comportamento dinamico de uma viga em fundacao viscoelastica percorrida por um oscilador
em movimento uniforme. No Capıtulo 3 estuda-se o caso de uma viga simplesmente apoiada sobre
fundacao elastica linear de Winkler. No Capıtulo 4 assume-se uma fundacao elastica de Winkler com
comportamento nao linear do tipo cubico. No Capıtulo 5 considera-se uma fundacao elastica com
comportamento bilinear. Nos Capıtulos 3 a 5 expoem-se as formulacoes para os diferentes tipos de
fundacao e explica-se o metodo usado na resolucao do sistema de equacoes diferenciais que regem
o movimento, concluindo cada um desses capıtulos com a apresentacao e discussao dos resultados
obtidos. Por fim, apresenta-se uma breve conclusao onde se resumem os principais resultados obtidos
e se referem topicos que merecem atencao num eventual desenvolvimento.
3

4

Capıtulo 2
Dinamica de um oscilador em viga
sobre fundacao
Este e o primeiro capıtulo verdadeiramente dedicado ao comportamento dinamico de uma viga em
fundacao viscoelastica percorrida por um oscilador em movimento uniforme. Os estudos parametricos
apresentados nos Capıtulos 3, 4 e 5 baseiam-se na teoria e nas equacoes da dinamica apresentados
neste capıtulo.
2.1 Teoria e formulacao do problema
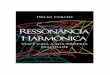
Considere-se uma viga de Euler-Bernoulli discretizada em elementos finitos de dois nos (Figura 2.1).
A viga tem altura uniforme h, massa por unidade de volume ρ, modulo de elasticidade E, momento de
inercia I e area da seccao transversal A. Apoia-se numa fundacao visco-elastica do tipo Winkler e e
atuada pelo seu peso proprio e pela acao de um oscilador de um grau de liberdade deslocando-se a
uma velocidade constante v, paralelamente ao eixo da viga. O oscilador de um grau de liberdade e
constituıdo por uma massa m1 ligada por uma mola de rigidez k e um amortecedor de coeficiente de
amortecimento c, associados em paralelo. Na extremidade oposta deste sistema existe uma massa m2
que esta em contacto persistente com a viga. O eixo que identifica as seccoes da viga designa-se por
x sendo x0 a abcissa que corresponde ao ponto de contacto da massa m2 com a viga. A coordenada
yt representa o deslocamento vertical total do centro de gravidade da massa m1 contado a partir da
Figura 2.1: Viga discretizada pelo Metodo dos Elementos Finitos sujeita a acao de um oscilador movel.
5

posicao indeformada da mola. O deslocamento transversal do centro de gravidade da seccao da viga
com abcissa x designa-se por w(x) e o deslocamento transversal do centro de gravidade da seccao da
viga em contacto com o oscilador designa-se por w0.
O conjunto das equacoes que regem o movimento e constituıdo por tres subconjuntos: a equacao
da massa m1, a equacao da massa m2 e o sistema de equacoes que resulta da discretizacao da viga
pelo metodo dos elementos finitos (MEF). Em primeiro lugar, aplicando o princıpio de d’Alambert a
massa m1 obtem-se
m1yt + cyt + kyt = cw0 + kw0 −m1g. (2.1)
Figura 2.2: Principio de d’Alembert aplicado a massa m1.
Em (2.1) a notacao ( ˙ ) designa a primeira derivada da funcao ( ) em ordem ao tempo. Definindo yt =
−m1gk + y de forma a que y represente o deslocamento vertical da massa m1 a partir da configuracao
estatica deformada da mola correspondente a w0 = 0 e notando que yt = y e yt = y, obtem-se
m1y + cy + ky = cw0 + kw0. (2.2)
Aplicando agora o princıpio de d’Alembert a massa m2 obtem-se
− r −m2g − k(w0 − yt)− c(w0 − yt) = m2w0. (2.3)
Figura 2.3: Principio de d’Alembert aplicado a massa m2 em contacto com a viga.
A quantidade r designa a reacao da viga sobre a massa m2. A reacao r e sempre negativa uma
vez que o contacto entre a massa m2 e a viga e do tipo unilateral, resistindo apenas a compressoes.
No entanto, neste modelo admite-se que o contacto entre a massa e a viga e do tipo persistente. A
expressao (2.3) tambem se pode escrever na forma
r = −(m1 +m2)g −m2w0 − c(w0 − y)− k(w0 − y). (2.4)
Por fim, falta definir o sistema de equacoes que resulta da discretizacao da viga pelo metodo dos
6

elementos finitos. As equacoes que regem o movimento da viga podem escrever-se na forma vetorial
Md + Cd + Kd = P + rNT(x0) (2.5)
em que d e o vetor das coordenadas generalizadas resultantes da composicao dos vetores das coorde-
nadas generalizadas elementares de ={de1 de2 de3 de4
}T
, cujo significado geometrico se apresenta
na Figura 2.4. Os deslocamentos nodais sao positivos no sentido ascendente e as rotacoes sao posi-
tivas no sentido direto. Os deslocamentos transversais num elemento finito obtem-se em funcao das
quatro coordenadas generalizadas nodais,
we(x, t) ={Ne
1 (x) Ne2 (x) Ne
3 (x) Ne4 (x)
}
de1(t)
de2(t)
de3(t)
de4(t)
= Ne(x)de(t) (2.6)
em que
Ne1 (x) = 1− 3
l2x2 +
2
l3x3,
Ne2 (x) = x− 2
lx2 +
1
l2x3,
Ne3 (x) =
3
l2x2 − 2
l3x3,
Ne4 (x) = −1
lx2 +
1
l2x3.
Note-se que o vetor NT(x0) ={
0 ... 0 Ne1 (x0) Ne
2 (x0) Ne3 (x0) Ne
4 (x0) 0 ... 0}
presente no mem-
bro da direita da Equacao (2.5) e formado por zeros a excecao das quatro componentes corres-
pondentes ao elemento finito onde a carga movel r se encontra no instante em analise. O ve-
tor das forcas generalizadas Qe do elemento finito onde a carga se encontra e dado por Qe ={rNe
1(x0) rNe2(x0) rNe
3(x0) rNe4(x0)
}T
conforme esta esquematizado na Figura 2.5.
Figura 2.4: Deslocamentos nodais de um elemento de viga uniforme do tipo Euler-Bernoulli.
7

Figura 2.5: Forcas nodais elementares estaticamente equivalentes a acao de uma forca pontual.
O vetor P na Equacao (2.5) representa a acao do peso proprio e e obtido pela reuniao dos vetores
elementares Pe ={−γAl2 −γAl
2
12 −γAl2γAl2
12
}T
que contem as forcas nodais generalizadas esta-
ticamente equivalentes a acao da carga uniformemente distribuıda que representa o peso proprio da
viga, como esta representado na Figura 2.6. Finalmente, e necessario exprimir o deslocamento w0 do
ponto de contacto entre o oscilador e a viga bem como as suas derivadas w0 e w0, que surgem nas
Equacoes (2.2) e (2.4), em termos das coordenadas generalizadas (d, y) e das suas derivadas. Assim,
w0 = w0(x0, t) = N(x0)d(t), (2.7)
∂w0
∂t= N(x0)d(t),
∂2w0
∂t2= N(x0)d(t),
∂w0
∂x0= N′(x0)d(t),
∂2w0
∂x20= N′′(x0)d(t).
Deste modo, obtem-se
w0(x0, t) =dw0
dt=∂w0
∂t+∂w0
∂x0
∂x0∂t
= N(x0)d(t) + vN′(x0)d(t), (2.8)
Figura 2.6: Forcas nodais elementares estaticamente equivalentes a acao de uma forca distribuıda.
8

uma vez que x0 = v. Sabendo que o oscilador se desloca a velocidade constante (d2x0
dt2 = 0), obtem-se
w0(x0, t) =d2w0
dt2=
d
dt
(∂w0
∂t
)+d
dt
(∂w0
∂x0
dx0dt
)=∂2w0
∂t2+∂2w0
∂t∂x0
dx0dt
+∂2w0
∂t∂x0
dx0dt
+∂w0
∂x0
d2x0dt2
+∂2w0
∂x20
(dx0dt
)2
=∂2w0
∂t2+ 2v
∂2w0
∂x0∂t+ v2
∂2w0
∂x20
= N(x0)d(t) + 2vN′(x0)d(t) + v2N′′(x0)d(t). (2.9)
Resumindo, o conjunto de equacoes diferenciais ordinarias acopladas que regem o movimento e
Md + Cd + Kd = P + rNT (x0), (2.10)
m1y + cy + ky = kw0 + cw0, (2.11)
em que o acoplamento e dado pela forca de contacto entre o oscilador e a viga presente no segundo
membro da Equacao (2.10) e pelos termos presentes no segundo membro da Equacao (2.11). No
modelo de elementos finitos, substituindo (2.7), (2.8) e (2.9) em (2.4) obtem-se a forca de contacto
r =− (m1 +m2)g −m2
[N(x0)d(t) + 2vN′(x0)d(t) + v2N′′(x0)d(t)
]− c(N(x0)d(t) + vN′(x0)d(t)− y
)− k(N(x0)d(t)− y
). (2.12)
Substituindo (2.12) em (2.10) e (2.7) e (2.8) em (2.11) obtem-se o sistema
Md + Cd + Kd = P− (m1 +m2)gNT(x0)−m2N(x0)dNT(x0)
−2m2vN′(x0)dNT(x0)−m2v
2N′′(x0)dNT(x0)
−cN(x0)dNT(x0)− cvN′(x0)dNT(x0) + cyNT(x0)
−kN(x0)dNT(x0) + kyNT(x0)
m1y + cy + ky = kN(x0)d + cN(x0)d + cvN′(x0)d.
O sistema anterior pode ser escrito em forma matricial, o que permite identificar as matrizes globais de
massa, amortecimento e de rigidez. Note-se que tanto a matriz de massa como a de amortecimento
sao simetricas; no entanto a matriz de rigidez nao e simetrica:M +m2NT(x0)N(x0) 0
0T m1
d
y
+
C + cNT(x0)N(x0) + 2m2vNT(x0)N′(x0) −cNT(x0)
−cN(x0) c
d
y
+
K + kNT(x0)N(x0) + cvNT(x0)N′(x0) +m2v2NT(x0)N′′(x0) −kNT(x0)
−kN(x0)− cvN′(x0) k
d
y
=
P− (m1 +m2)gNT(x0)
0
. (2.13)
9

No sistema anterior N′(x0) e N′′(x0) designam, respectivamente, a primeira e segunda derivadas de
N(x) avaliadas em x0,
N′(x0) ={
0 ... 0 Ne′1 (x0) Ne′
2 (x0) Ne′3 (x0) Ne′
4 (x0) 0 ... 0}
(2.14)
em que
Ne′1 (x0) = − 6
l2x0 +
6
l3x20,
Ne′2 (x0) = 1− 4
lx0 +
3
l2x20,
Ne′3 (x0) =
6
l2x0 −
6
l3x20,
Ne′4 (x0) = −2
lx0 +
3
l2x20 (2.15)
e
N′′(x0) ={
0 ... 0 Ne′′1 (x0) Ne′′
2 (x0) Ne′′3 (x0) Ne′′
4 (x0) 0 ... 0}
(2.16)
em que
Ne′′1 (x0) = − 6
l2+
12
l3x0,
Ne′′2 (x0) = −4
l+
6
l2x0,
Ne′′3 (x0) =
6
l2− 12
l3x0,
Ne′′4 (x0) = −2
l+
6
l2x0. (2.17)
Para concluir este capıtulo, falta ainda definir as condicoes de fronteira. Se o numero de elementos
finitos for igual a n, o sistema (2.13) e constituıdo por 2n + 3 equacoes, em que 2n + 2 equacoes sao
provenientes do modelo de elementos finitos da viga e uma equacao que corresponde ao grau de liber-
dade vertical do oscilador movel. O sistema de equacoes (2.13) modela o caso em que nao se impoe
quaisquer condicoes de fronteira, representado na Figura 2.7, em que as extremidades da viga estao
livres. Neste caso d ∈ R2n+2 e y ∈ R.
Figura 2.7: Viga com extremidades livres apoiada em fundacao.
Podem-se considerar outros tipos de condicoes de fronteira, por exemplo as extremidades podem ser
apoios simples ou encastramentos, como esta representado na Figura 2.8, ou ate eventualmente en-
castramentos deslizantes. No processo de reuniao dos elementos finitos de barra para se construir o
modelo completo as forcas Qek e Qe+1k comuns a dois elementos finitos adjacentes anulam-se pela 3a
lei de Newton. As forcas generalizadas das seccoes extremas da viga Q11, Q2
1, Qn3 , Qn4 serao nulas no
10

caso em nao se prescrevem condicoes de fronteira cinematicas mas, caso se utilizem outras condicoes
de fronteira cinematicas, as forcas generalizadas dessas seccoes representam as reacoes de apoio,
em geral nao nulas. Portanto, e necessario eliminar as equacoes do modelo de elementos finitos da
viga que correspondem as forcas de reacao. Se os apoios forem fixos eliminam-se a 2a e a (2n + 1)-
esima equacoes. Se os apoios forem encastramentos perfeitos eliminam-se a 1a, 2a, (2n + 1)-esima e
(2n+ 2)-esima equacoes.
(a) Viga com apoios simples. (b) Viga encastrada.
Figura 2.8: Diferentes tipos de condicoes de fronteira.
11

12

Capıtulo 3
Fundacao linear
Neste capıtulo estuda-se o caso mais simples e classico de uma viga sobre fundacao elastica linear
(de Winkler) sujeita a passagem de um oscilador de um grau de liberdade com velocidade constante.
Obtem-se as respectivas matrizes de massas, de amortecimento e de rigidez de acordo com o metodo
dos elementos finitos e explica-se o metodo de integracao no tempo das equacoes da dinamica. Final-
mente apresentam-se e discutem-se os resultados das analises realizadas para este modelo.
3.1 Matriz de rigidez elementar
A matriz de rigidez elementar Ke que advem do metodo de elementos finitos e composta pela soma
de duas componentes. A primeira componente e a matriz de rigidez da viga e a segunda e a matriz de
rigidez da fundacao elastica:
Ke = Keb + Ke
f . (3.1)
Em primeiro lugar, trataremos de obter a matriz de rigidez elementar da viga. A energia potencial
elastica devida a flexao e dada por
Ub =1
2
∫V
σxxεxxdV =1
2
∫ l
0
w′′Mdx (3.2)
em que w′′ = d2wdx2 e M e o campo de momentos fletores dado por
M(x) = EId2w
dx2= EI Ne′′(x)de, (3.3)
sendo EI a rigidez de flexao da viga. Substituindo (2.6) e (3.3) em (3.2) obtem-se
Ub =1
2
∫ l
0
(Ne′′(x)de)T EI Ne′′(x)dedx =
=1
2(de)TKe
bde (3.4)
13

em que
Keb =
12EIl3
6EIl2 − 12EI
l36EIl2
6EIl2
4EIl − 6EI
l22EIl
− 12EIl3 − 6EI
l212EIl3 − 6EI
l2
6EIl2
2EIl − 6EI
l24EIl
. (3.5)
Por fim, obtem-se a matriz de rigidez elementar devida a fundacao linear. A energia potencial elastica
da fundacao de um elemento finito e
Uf =
∫ l
0
dUf =1
2
∫ l
0
w(x)Tklw(x)dx =1
2
∫ l
0
(Ne(x)de)T kl Ne(x)dedx =
=1
2(de)TKe
fde (3.6)
em que kl e o coeficiente de rigidez da fundacao e
Kef = kl
1335 l
11210 l
2 970 l − 13
420 l2
11210 l
2 1105 l
3 13420 l
2 − 1140 l
3
970 l
13420 l
2 1335 l − 11
210 l2
− 13420 l
2 − 1140 l
3 − 11210 l
2 1105 l
3
. (3.7)
A matriz de rigidez elementar e a soma das matrizes (3.5) e (3.7).
3.2 Matriz de massa elementar
Considerando apenas a parcela de translacao (o que e uma boa aproximacao no caso das vigas esbel-
tas que consideramos nesta dissertacao), a energia cinetica de um elemento de viga e
T =
∫ l
0
dT =1
2
∫ l
0
wTρAwdx =1
2
∫ l
0
(Ne(x)de)T ρANe(x)dedx =
=1
2deTMe
t de (3.8)
em que ρ e a massa por unidade de volume do material da viga (obviamente, aco), A e a area da
seccao transversal da viga (ρA e a massa por unidade de comprimento da viga) e
Met =
ρAl
420
156 22l 54 −13l
22l 4l2 13l −3l2
54 13l 156 −22l
−13l −3l2 −22l 4l2
. (3.9)
14

3.3 Matriz de amortecimento
Considerando um amortecimento do tipo Rayleigh, a matriz de amortecimento C obtem-se pela
combinacao das matrizes de massa e de rigidez.
C = a0M + a1K. (3.10)
Neste trabalho utiliza-se a expressao
a0 = 2ζ
√2klρA
(3.11)
sugerida por Dimitrovova e Rodrigues (2012) e considera-se a1=0. Na Equacao (3.10), ζ e o factor de
amortecimento, o qual nao deve ultrapassar 8% para que a equacao (3.11) seja valida (Dimitrovova e
Rodrigues, 2012).
3.4 Integracao no tempo das equacoes do movimento
De forma a resolver as equacoes gerais do movimento previamente apresentadas, utiliza-se um es-
quema de integracao implıcita denominado metodo-α (Hilber et al., 1977), que e uma modificacao do
metodo classico de Newmark. Designando por M, C e K respetivamente as matrizes globais de massa,
amortecimento e rigidez,
M =
M +m2NT (x0)N(x0) 0
0T m1
,C =
C + cNT (x0)N(x0) + 2m2vNT (x0)N′(x0) −cNT (x0)
−cN(x0) c
,K =
K + kNT (x0)N(x0) + cvNT (x0)N′(x0) +m2v2NT (x0)N′′(x0) −kNT (x0)
−kN(x0)− cvN′(x0) k
a discretizacao temporal das equacoes do movimento (2.13) e
Mn+1qn+1 + (1 + α)pn+1 − αpn = f(tn+α), (3.12)
em que tn+α = (1 +α)tn+1−αtn = tn+1 +α∆t, sendo ∆t o incremento de tempo considerado. O vetor
p = Cq+Kq representa as forcas internas e f(tn+α) representa o vetor {P− (m1 +m2)gNT(x0) 0}T
para a posicao do oscilador no instante tn+α. O vetor q = {dT y}T e o vector de deslocamentos
global e q e q sao as respectivas derivadas em ordem ao tempo. A evolucao no tempo das solucoes
aproximadas e dada pelas expressoes
qn+1 = qn+1 + ∆t2βqn+1, (3.13)
15

qn+1 = ˜qn+1 + ∆tγqn+1 (3.14)
em que
qn+1 = qn + ∆tqn +∆t2
2(1− 2β)qn, (3.15)
˜qn+1 = qn + ∆t(1− γ)qn. (3.16)
Os termos qn+1 e ˜qn+1 sao previsoes para os deslocamentos e velocidades e os termos qn+1 e qn+1
sao os respetivos valores corrigidos. O coeficiente α permite introduzir amortecimento numerico sem
reduzir a ordem de convergencia do metodo e quanto menor for α maior sera o amortecimento. Para
α = 0, o metodo reduz-se ao metodo de Newmark e o amortecimento numerico e nulo. Em problemas
lineares o parametro α deve ser escolhido no intervalo [− 13 , 0]. Pode-se reduzir os tres parametros a
um escolhendo γ = (1− 2α)/2 e β = (1−α)2/4. Esta escolha de parametros permite obter um metodo
estavel, para qualquer incremento de tempo. Nas analises realizadas utilizou-se α = −0.1 (Jorge,
2013).
Para iniciar o algoritmo, as aceleracoes q0 obtem-se a partir das condicoes iniciais de deslocamento e
velocidade por resolucao de
Mq0 = f0 − q0. (3.17)
Utilizando um metodo do tipo Newton-Raphson, resolve-se o sistema (3.12)-(3.16). Resumidamente, a
resolucao do problema apresenta os seguintes passos:
1. Colocar em zero o contador de iteracoes: i = 0.
2. Iniciar a fase de previsao:
qin+1 = qn+1 = qn + ∆tqn +∆t2
2(1− 2β)qn,
qin+1 =1
(∆t)2β(qin+1 − qn+1),
qin+1 = ˜qn+1 = qn + ∆t(1− γ)qn.
3. Calcular a forca residual:
∆Ri = f(tn+α)−Mn+1qin+1 − (1 + α)pin+1 + αpn.
4. Obter a matriz de rigidez efetiva utilizando a expressao:
K∗ =1
∆t2βMn+1 + (1 + α)Ki
n+1 +(1 + α)γ
β∆tCin+1.
5. Resolver o sistema:
K∗∆qi = ∆Ri.
16

6. Fase de correcao:
qi+1n+1 = qin+1 + ∆qi,
qi+1n+1 =
1
(∆t)2β(qi+1n+1 − qn+1),
qi+1n+1 = ˜qn+1 + ∆tγqi+1
n+1.
7. Se ∆Ri nao satisfizer as condicoes de convergencia, ||∆Ri|| < ε com ε suficientemente pequeno,
entao i← i+ 1 e voltar ao passo 3. Caso contrario prosseguir para o passo 8.
8. Definir:
qn+1 = qi+1n+1,
qn+1 = qi+1n+1,
qn+1 = qi+1n+1.
para utilizar no proximo incremento de tempo. Atribuir n ← n+ 1, calcular pn e voltar ao passo 1
para o proximo incremento de tempo.
3.5 Resultados e comentarios
Nesta seccao apresentam-se os resultados das analises efetuadas com o modelo de elementos finitos
desenvolvido utilizando o software MatLab. Na Tabela 3.1 apresentam-se as propriedades da viga
em estudo - carril UIC60. Este carril e o mesmo que foi usado por Dimitrovova e Rodrigues (2012)
e por Jorge (2013) e permite assim a comparacao directa de alguns resultados aqui obtidos com os
destas referencias. Tomou-se como primeira hipotese o valor de 8500 kg para a massam1 (corresponde
a uma massa total por eixo de rodas de 17 000 kg da locomotiva do comboio de alta-velocidade da
Thalys) e considerou-se que a massa m2 e nula. Consideraram-se tres osciladores diferentes fazendo
variar a frequencia natural do oscilador de um grau liberdade (p = 5 rad/s; p = 10 rad/s; p = 25 rad/s)
apresentando um fator de amortecimento igual a 40%.
Tabela 3.1: Propriedades do carril UIC60
.
Modulo de elasticidade E (GPa) 210
Inercia da seccao transversal I (m4) 3055× 10−8
Area da seccao transversal A (m2) 7684× 10−6
Altura do perfil h (mm) 172
Altura do centro de gravidade dG (mm) 81
Massa volumica ρ (kg/m3) 7800
17

3.5.1 Identificacao da velocidade crıtica
Nesta seccao pretende-se determinar a velocidade que origina os maiores deslocamentos na viga,
denominada velocidade crıtica. Para tal, obtiveram-se as curvas de deslocamentos positivos (ascen-
dentes) e negativos (descendentes) maximos da viga, as curvas de deslocamentos maximos positivos
e negativos do oscilador, as curvas de aceleracoes maximas do oscilador e as curvas das forcas de
contacto maximas em funcao da velocidade do oscilador. A viga simplesmente apoiada tem um com-
primento de 200 m e utilizou-se uma malha de 200 elementos para a frequencia natural do oscilador
mais baixa e uma malha com 400 elementos finitos para as frequencias naturais mais elevadas com
um passo de tempo correspondente a um avanco de 20% do comprimento de um elemento finito em
cada passo de tempo. Desprezou-se o peso proprio da viga. Adotou-se um comprimento de viga igual
ao que foi usado por Dimitrovova e Rodrigues (2012) e por Jorge (2013) para permitir a comparacao
de resultados e tambem porque Dimitrovova e Rodrigues (2012) mostraram que a velocidade crıtica de
uma carga movel numa viga com um comprimento de 200 m e praticamente coincidente com a cor-
respondente velocidade crıtica numa viga infinita. Variou-se a rigidez da fundacao entre 250 kN/m2 e
500 kN/m2 e o fator de amortecimento da fundacao entre 0% e 2%. Os valores de rigidez da fundacao
e amortecimento sao iguais aos usados em Jorge (2013) de forma a ser possıvel efetuar comparacoes
entre os dois modelos; estes valores sao baixos quando comparados com os valores reais das rigide-
zes das fundacoes. Para o tracado dos graficos usou-se um intervalo de velocidades entre 50 m/s e
300 m/s; registaram-se valores a cada incremento de 1 m/s na velocidade do oscilador. Os resultados
apresentados correspondem aos maximos registados durante a passagem do oscilador sobre a viga.
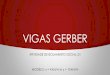
Na Figura 3.1(a) representam-se as curvas dos deslocamentos maximos da viga para uma fundacao
uniforme com kl = 250 kN/m2 sem amortecimento, para osciladores com frequencias naturais angu-
lares de 5, 10 e 25 rad/s. Note-se que existe um pico por volta dos 205 m/s para qualquer dos oscila-
dores, que representa a velocidade crıtica e coincide praticamente com o valor obtido por Dimitrovova
e Rodrigues (2012) e por Jorge (2013) para o caso de uma carga movel. A velocidade crıtica cor-
responde a ocorrencia de um fenomeno de ressonancia entre a velocidade do oscilador e a mınima
velocidade de fase de ondas na estrutura (Metrikine e Verichev, 2001). Existe ainda um segundo pico
que ocorre para velocidades mais elevadas. Este segundo pico corresponde a ocorrencia de instabili-
dade dinamica (flutter) no sistema viga-fundacao-oscilador (Metrikine e Verichev, 2001) para uma certa
gama de velocidades dependente da rigidez e do amortecimento da fundacao e do oscilador. Essa
gama de velocidades para as quais ha instabilidade aumenta a medida que a frequencia natural do
oscilador aumenta. Em todos o graficos da Figura 3.1 nota-se que para uma frequencia do oscilador
de 5 rad/s o segundo pico e quase imperceptıvel enquanto que para p = 10 rad/s e p = 25 rad/s os
valores maximos do deslocamento da viga e do oscilador, da aceleracao do oscilador e da forca de
contacto entre a viga e o oscilador nesse segundo pico sao maiores. A existencia de amortecimento
reduz significativamente os deslocamentos maximos sem praticamente alterar o valor da velocidade
crıtica (Figura 3.2(a)). A comparacao das Figuras 3.1(a, b) e 3.2(a, b) respetivamente com as Figuras
3.1(c, d) e 3.2(c, d) permite-nos concluir que os graficos das aceleracoes maximas do oscilador e da
forca maxima de contacto entre a viga e o oscilador sao irregulares no sentido em que tem um maior
18

numero de extremos locais. Da observacao de todos os graficos (c) e (d) poderemos concluir que em
alguns casos nao faz sentido o conceito de velocidade crıtica para definir a velocidade na vizinhanca
da qual ou a partir da qual as amplitudes sao claramente mais elevadas.
O aumento da rigidez da fundacao tem o efeito de diminuir os deslocamentos, aceleracao e forca
maximos alem de aumentar a velocidade crıtica, como se pode concluir da comparacao dos pares de
Figuras (3.1, 3.3) e (3.2, 3.4). Segundo alguns autores a rigidez da fundacao pode chegar a 108 kN/m2
(Metrikine e Verichev, 2001); assim sendo, para valores mais realistas da rigidez da fundacao o valor da
velocidade crıtica pode atingir 1600 m/s, velocidade que esta claramente acima da velocidade maxima
de qualquer transporte terrestre atual. Na Tabela 3.2 apresentam-se os deslocamentos maximos posi-
tivo e negativo com e sem amortecimento para os tres diferentes osciladores e as velocidades crıticas
a que tais extremos ocorrem.
Nos graficos das Figuras 3.1(b), 3.2(b), 3.3(b) e 3.4(b) o troco de deslocamentos maximos positivos
nulos do oscilador para velocidades do oscilador abaixo da velocidade crıtica deve-se ao facto de,
para velocidades suficientemente pequenas o deslocamento positivo nunca exceder o deslocamento
negativo da seccao da viga sob o oscilador.
Na Figura 3.1(c) e na Figura 3.1(d) representam-se respetivamente as aceleracoes maximas do os-
cilador e as forcas de contacto maximas em funcao da velocidade do oscilador. Para os dois osciladores
com frequencias proprias mais baixas, os valores de aceleracao do oscilador e forca de contacto sao
altos apenas para a zona proxima da velocidade crıtica mas para o oscilador com frequencia propria
mais elevada as aceleracoes maximas tomam valores bastante elevados para velocidades inferiores a
velocidade crıtica. Verifica-se ainda a ocorrencia de forcas de contacto maximas positivas para veloci-
dades do oscilador proximas da velocidade crıtica que levariam ao descarrilamento se o contacto fosse
unilateral em vez de persistente.
Tabela 3.2: Picos dos deslocamentos maximos para fundacao linear uniforme.As propriedades do carril estao na Tabela 3.1.
p (rad/s) ζkl = 250 kN/m2 kl = 500 kN/m2
v (m/s) wmax (m) v (m/s) wmax (m)
5
0210 0.564 249 0.372
204 −0.521 245 −0.353
0.02210 0.317 248 0.190
205 −0.326 245 −0.207
10
0210 0.580 249 0.383
211 −0.534 250 −0.359
0.02208 0.305 248 0.186
206 −0.302 246 −0.181
25
0210 0.588 249 0.387
204 −0.598 244 −0.370
0.02208 0.309 248 0.188
204 −0.375 244 −0.217
19

50 100 150 200 250 300−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
v (m/s)
wm
ax (
m)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(a) Deslocamento maximo na viga em funcao davelocidade do oscilador.
50 100 150 200 250 300−0.5
0
0.5
v (m/s)
y max
(m
)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(b) Deslocamento maximo do oscilador em funcaoda velocidade do oscilador.
50 100 150 200 250 300−1500
−1000
−500
0
500
1000
1500
v (m/s)
a max
(m
/s2 )
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(c) Aceleracao maxima do oscilador em funcao davelocidade do oscilador.
50 100 150 200 250 300−1
−0.5
0
0.5
1x 10
4
v (m/s)
r (k
N)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(d) Forca maxima de contacto em funcao da velo-cidade do oscilador.
Figura 3.1: Resultados para uma fundacao uniforme com kl = 250 kN/m2, sem amortecimento.
50 100 150 200 250 300−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
v (m/s)
wm
ax (
m)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(a) Deslocamento maximo na viga em funcao davelocidade do oscilador.
50 100 150 200 250 300−0.5
0
0.5
v (m/s)
y max
(m
)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(b) Deslocamento maximo do oscilador em funcaoda velocidade do oscilador.
50 100 150 200 250 300−1500
−1000
−500
0
500
1000
1500
v (m/s)
a max
(m
/s2 )
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(c) Aceleracao maxima do oscilador em funcao davelocidade do oscilador.
50 100 150 200 250 300−1
−0.5
0
0.5
1x 10
4
v (m/s)
r (k
N)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(d) Forca maxima de contacto em funcao da velo-cidade do oscilador.
Figura 3.2: Resultados para uma fundacao uniforme com kl = 250 kN/m2, com amortecimento ζ= 2%.
20

50 100 150 200 250 300−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
v (m/s)
wm
ax (
m)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(a) Deslocamento maximo na viga em funcao davelocidade do oscilador.
50 100 150 200 250 300−0.5
0
0.5
v (m/s)
y max
(m
)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(b) Deslocamento maximo do oscilador em funcaoda velocidade do oscilador.
50 100 150 200 250 300−1500
−1000
−500
0
500
1000
1500
v (m/s)
a max
(m
/s2 )
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(c) Aceleracao maxima do oscilador em funcao davelocidade do oscilador.
50 100 150 200 250 300−1
−0.5
0
0.5
1x 10
4
v (m/s)
r (k
N)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(d) Forca maxima de contacto em funcao da velo-cidade do oscilador.
Figura 3.3: Resultados para uma fundacao uniforme com kl = 500 kN/m2, sem amortecimento.
50 100 150 200 250 300−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
v (m/s)
wm
ax (
m)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(a) Deslocamento maximo na viga em funcao davelocidade do oscilador.
50 100 150 200 250 300−0.5
0
0.5
v (m/s)
y max
(m
)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(b) Deslocamento maximo do oscilador em funcaoda velocidade do oscilador.
50 100 150 200 250 300−1500
−1000
−500
0
500
1000
1500
v (m/s)
a max
(m
/s2 )
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(c) Aceleracao maxima do oscilador em funcao davelocidade do oscilador.
50 100 150 200 250 300−1
−0.5
0
0.5
1x 10
4
v (m/s)
r (k
N)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(d) Forca maxima de contacto em funcao da velo-cidade do oscilador.
Figura 3.4: Resultados para uma fundacao uniforme com kl = 500 kN/m2 com amortecimento ζ= 2%.
21

3.5.2 Estudos parametricos
Na seccao anterior mostraram-se e interpretaram-se graficos de varias quantidades em funcao da velo-
cidade do oscilador, o que permitiu identificar velocidades crıticas na vizinhanca das quais as amplitudes
adquirem valores significativos.
Os estudos parametricos efetuados na presente seccao levaram a construcao de 24 figuras (3.5 a
3.28), com o objetivo de estudar os efeitos da variacao da rigidez da fundacao (kl), da velocidade e
frequencia natural do oscilador (v e p) e do comprimento da viga (L) sobre (a) a amplificacao dinamica
do deslocamento a meio vao da viga, (b) a amplificacao dinamica do momento fletor a meio vao da viga,
(c) o deslocamento da massa superior do oscilador, (d) a aceleracao da massa superior do oscilador e
(e) a forca de contacto entre o oscilador e a viga. Essas 24 figuras dividem-se em tres grandes grupos
como se pode observar na Tabela 3.3.
Tabela 3.3: Valores para os quais os graficos das Figuras 3.5 a 3.28 foram tracados.
Figura kl (kN/m2) v (m/s) L (m) p (rad/s)
3.5 var. 100 200 5
3.6 var. 100 200 10
3.7 var. 100 200 25
3.8 var. 200 200 5
3.9 var. 200 200 10
3.10 var. 200 200 25
3.11 250 var. 200 5
3.12 250 var. 200 10
3.13 250 var. 200 25
3.14 1000 var. 200 5
3.15 1000 var. 200 10
3.16 1000 var. 200 25
3.17 250 100 var. 5
3.18 250 100 var. 10
3.19 250 100 var. 25
3.20 250 200 var. 5
3.21 250 200 var. 10
3.22 250 200 var. 25
3.23 1000 100 var. 5
3.24 1000 100 var. 10
3.25 1000 100 var. 25
3.26 1000 200 var. 5
3.27 1000 200 var. 10
3.28 1000 200 var. 25
Num primeiro grupo (Figuras 3.5 a 3.10) analisa-se o efeito da variacao da rigidez da fundacao, no
segundo grupo (Figuras 3.11 a 3.16) analisa-se o efeito da variacao da velocidade do oscilador e no
terceiro grupo (Figuras 3.17 a 3.28) analisa-se o efeito da variacao do comprimento da viga. Todas
22

as curvas representam os valores instantaneos das ordenadas das funcoes em funcao do tempo adi-
mensional t/τ , em que t e o tempo contado desde que o oscilador entrou na viga e τ o tempo total
que os oscilador demora a percorrer a viga. Os graficos (a) e (b) das Figuras 3.5 a 3.28 representam
os coeficientes de amplificacao dinamica do deslocamento e do momento fletor a meio vao da viga,
definidos por
φw =wdin
1/2 vao
west1/2 vao
, φM =Mdin
1/2 vao
M est1/2 vao
, (3.18)
em que wdin1/2 vao e Mdin
1/2 vao designam respetivamente os deslocamento e momento fletor dinamicos
instantaneos da seccao de meio vao da viga enquanto west1/2 vao e M est
1/2 vao designam respetivamente a
flecha e o momento fletor da seccao a meio vao quando a viga for carregada de forma quase-estatica
por uma forca igual ao peso do oscilador aplicado a meio vao da viga. Nos estudos parametricos que se
seguem adotam-se as caracteristicas do carril UIC60 (Tabela 3.1), tres frequencias naturais diferentes
do oscilador (5, 10 e 25 rads/s), um fator de amortecimento do oscilador igual a 40 %, m1 = 8500 Kg e
m2 = 0. Para a viga adotou-se uma malha de 400 elementos finitos e um fator de amortecimento da
fundacao nulo (ζ = 0). As integracoes das equacoes dinamicas efetuaram-se com um passo de tempo
que corresponde a progressao do oscilador no comprimento de 1/5 de elemento finito.
Nas Figuras 3.5, 3.6 e 3.7 estuda-se o efeito da rigidez da fundacao para uma velocidade do osci-
lador bastante inferior a velocidade crıtica. A velocidade crıtica de uma forca em movimento uniforme
numa viga de Euler-Bernoulli infinita sobre uma fundacao elastica linear de Winkler e dada por (Fryba,
1999)
vcr = 4
√4klEI
(ρA)2, (3.19)
pelo que, para as rigidezes adotadas para a fundacao e as propriedades do carril UIC60, os valores
das velocidades crıticas variam entre 206 m/s e 346 m/s. Uma vez que v = 100 m/s esta afastada
da velocidade crıtica os coeficientes de amplificacao dinamica φw e φM (Figuras (a) e (b)) quando
o oscilador passa na seccao de meio vao sao praticamente iguais a 1, independentemente do valor
da rigidez da fundacao. Nos graficos (c) observamos que quanto menor a rigidez da fundacao maior
sera a amplitude do deslocamento do oscilador. Nos graficos (d) e (e) observamos que proximo do
momento em que o oscilador sai da viga ocorre um aumento subito da aceleracao do oscilador e da
forca de contacto entre o oscilador e a viga, o que sera certamente devido a rigidez (infinita) do apoio
simples da viga na direcao vertical; a adocao de outro tipo de condicoes fronteira para a viga (por
exemplo encastramento deslizante ou livre) devera reduzir substancialmente ou suprimir as variacoes
observadas perto de t/τ = 1 nos graficos (d) e (e). Um outro fenomeno que se observa nos graficos
(c),(d) e (e) das Figuras 3.5 a 3.7 e o crescente numero de oscilacoes entre t/τ = 0 e t/τ = 1 para
frequencias naturais do oscilador mais elevadas.
As Figuras 3.8, 3.9 e 3.10 correspondem ja a uma velocidade do oscilador (v = 200 m/s) proxima da
crıtica, pelo que os graficos (a) e (b) ja exibem fatores de amplificacao dinamica claramente superiores
a 1, embora os que se destacam sao os correspondentes a menor rigidez da fundacao em que a
velocidade crıtica e a mais proxima dos 200 m/s. Tambem neste conjunto de figuras se nota o mesmo
23

efeito de um aumento do numero de oscilacoes do deslocamento e aceleracao do oscilador e da forca
de contacto no perıodo de percurso sobre a viga, para frequencias naturais do oscilador crescentes.
Nos graficos (d) e (e) e igualmente nıtida a maior amplificacao da aceleracao do oscilador e da forca de
contacto para as duas menores rigidezes da fundacao para as quais a velocidade crıtica e mais proxima
da velocidade do oscilador.
Nas Figuras 3.11 a 3.16 estuda-se o efeito da velocidade do oscilador: para uma rigidez de fundacao
baixa nas Figuras 3.11 a 3.13 e para uma rigidez de fundacao mais elevada nas Figuras 3.14 a 3.16.
Novamente se observa nas Figuras 3.11 a 3.13 que uma velocidade (200 m/s) que esta muito proxima
da velocidade crıtica conduz a uma maior amplificacao das varias quantidades analisadas. Nas Figuras
3.14 a 3.16, atendendo a que a rigidez mais elevada da fundacao elastica faz aumentar a velocidade
crıtica para 346 m/s, para a gama de velocidades 50, 100, 150, 200 m/s os efeitos da amplificacao
dinamica nao sao muito significativos. Da Figura 3.14 para a Figura 3.16 nota-se novamente um au-
mento das oscilacoes nos graficos de deslocamento e aceleracao do oscilador e da forca de contacto
merce do aumento da frequencia natural do oscilador.
As doze Figuras 3.17 a 3.28 sao dedicadas ao estudo da influencia do comprimento da viga no seu
comportamento dinamico. Consideram-se quatro comprimentos: 50 m, 100 m, 200 m e 300 m. Quanto
maior o comprimento da viga mais o seu comportamento sera semelhante ao de uma viga infinita.
Nos graficos (a) e (b) das Figuras 3.17 a 3.19 observa-se que quanto mais longa for a viga mais
concentrados no meio vao estao os valores significativos dos graficos dos fatores de amplificacao do
deslocamento e momento de meio vao. As duas fontes de rigidez do problema sao a viga cuja rigidez
tem um caracter nao local no sentido em que uma forca aplicada no vao produz deslocamentos em
toda a viga e a fundacao de Winkler cuja rigidez tem um caracter estritamente local no sentido em que
uma carga aplicada diretamente a fundacao sem ser por intermedio da viga so produz deformacoes na
porcao de fundacao que esta por baixo da carga. Ora, em vigas curtas a importancia do carater nao
local da rigidez do problema e maior uma vez que a rigidez da fundacao nao depende do comprimento
da viga e a rigidez da viga aumenta com a diminuicao do seu comprimento. Isto explica a maior
dispersao em torno da seccao de meio vao dos coeficientes de amplificacao dinamica em vigas mais
curtas: neste tipo de vigas o efeito de amplificacao sobre a seccao de meio vao faz-se sentir quando
o oscilador esta mais longe da seccao de meio vao devido a maior importancia da rigidez da viga (de
tipo nao local). As Figuras 3.20 a 3.22 correspondem a uma velocidade dupla da das Figuras 3.17 a
3.19. Para os comprimentos maiores da viga nota-se o efeito da proximidade da velocidade crıtica que
conduz aos valores elevados de fatores de amplificacao dinamica (graficos (a) e (b)) e elevada oscilacao
da aceleracao do oscilador e da reacao.
Quando se aumenta a rigidez da fundacao para 1000 kN/m2 obtem-se os resultados das Figuras
3.23 a 3.28. O aumento de kl tem o efeito de aumentar a velocidade crıtica desviando-a das duas
velocidades consideradas (100 m/s para as Figuras 3.23 a 3.25) e 200 m/s para as Figuras 3.26 a
3.28). Consequentemente, os fatores de amplificacao voltam a ser moderados e nunca muito maiores
do que 1, embora os do caso v = 200 m/s sejam superiores aos do caso v = 100 m/s uma vez que a
velocidade crıtica esta mais proxima de 200 m/s do que de 100 m/s.
24

Observa-se igualmente nos graficos 3.17 a 3.28 que as curvas obtidas para uma viga com compri-
mento L = 300 m sao bastante proximas das obtidas para uma viga com comprimento L = 200 m, o
que justifica a utilizacao de uma viga finita de 200 m de comprimento para simular o comportamento de
uma viga infinita.
0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ w
kl = 250 kN/m2
kl = 500 kN/m2
kl = 1000 kN/m2
kl = 2000 kN/m2
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ M
kl = 250 kN/m2
kl = 500 kN/m2
kl = 1000 kN/m2
kl = 2000 kN/m2
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.2 0.4 0.6 0.8 1−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
t/τ
y (m
/s)
kl = 250 kN/m2
kl = 500 kN/m2
kl = 1000 kN/m2
kl = 2000 kN/m2
(c) Deslocamento do oscilador.
0 0.2 0.4 0.6 0.8 1−10
−5
0
5
10
15
20
t/τ
a (m
/s2 )
kl = 250 kN/m2
kl = 500 kN/m2
kl = 1000 kN/m2
kl = 2000 kN/m2
(d) Aceleracao do oscilador.
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
100
t/τ
r (k
N)
kl = 250 kN/m2
kl = 500 kN/m2
kl = 1000 kN/m2
kl = 2000 kN/m2
(e) Forca de contacto.
Figura 3.5: Efeito da rigidez da fundacao para v = 100 m/s, L = 200 m, p = 5 rad/s, ζ = 0% e m2 = 0.
0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ w
kl = 250 kN/m2
kl = 500 kN/m2
kl = 1000 kN/m2
kl = 2000 kN/m2
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ M
kl = 250 kN/m2
kl = 500 kN/m2
kl = 1000 kN/m2
kl = 2000 kN/m2
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.2 0.4 0.6 0.8 1−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
t/τ
y (m
/s)
kl = 250 kN/m2
kl = 500 kN/m2
kl = 1000 kN/m2
kl = 2000 kN/m2
(c) Deslocamento do oscilador.
0 0.2 0.4 0.6 0.8 1−10
−5
0
5
10
15
20
t/τ
a (m
/s2 )
kl = 250 kN/m2
kl = 500 kN/m2
kl = 1000 kN/m2
kl = 2000 kN/m2
(d) Aceleracao do oscilador.
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
100
t/τ
r (k
N)
kl = 250 kN/m2
kl = 500 kN/m2
kl = 1000 kN/m2
kl = 2000 kN/m2
(e) Forca de contacto.
Figura 3.6: Efeito da rigidez da fundacao para v = 100 m/s, L = 200 m, p = 10 rad/s, ζ = 0% e m2 = 0.
25

0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ w
kl = 250 kN/m2
kl = 500 kN/m2
kl = 1000 kN/m2
kl = 2000 kN/m2
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ M
kl = 250 kN/m2
kl = 500 kN/m2
kl = 1000 kN/m2
kl = 2000 kN/m2
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.2 0.4 0.6 0.8 1−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
t/τ
y (m
/s)
kl = 250 kN/m2
kl = 500 kN/m2
kl = 1000 kN/m2
kl = 2000 kN/m2
(c) Deslocamento do oscilador.
0 0.2 0.4 0.6 0.8 1−10
−5
0
5
10
15
20
t/τ
a (m
/s2 )
kl = 250 kN/m2
kl = 500 kN/m2
kl = 1000 kN/m2
kl = 2000 kN/m2
(d) Aceleracao do oscilador.
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
100
t/τ
r (k
N)
kl = 250 kN/m2
kl = 500 kN/m2
kl = 1000 kN/m2
kl = 2000 kN/m2
(e) Forca de contacto.
Figura 3.7: Efeito da rigidez da fundacao para v = 100 m/s, L = 200 m, p = 25 rad/s, ζ = 0% e m2 = 0.
0 0.2 0.4 0.6 0.8 1−4
−2
0
2
4
6
t/τ
φ w
kl = 250 kN/m2
kl = 500 kN/m2
kl = 1000 kN/m2
kl = 2000 kN/m2
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.2 0.4 0.6 0.8 1−4
−3
−2
−1
0
1
2
3
4
5
t/τ
φ M
kl = 250 kN/m2
kl = 500 kN/m2
kl = 1000 kN/m2
kl = 2000 kN/m2
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.2 0.4 0.6 0.8 1−0.5
0
0.5
t/τ
y (m
/s)
kl = 250 kN/m2
kl = 500 kN/m2
kl = 1000 kN/m2
kl = 2000 kN/m2
(c) Deslocamento do oscilador.
0 0.2 0.4 0.6 0.8 1−10
−5
0
5
10
15
20
t/τ
a (m
/s2 )
kl = 250 kN/m2
kl = 500 kN/m2
kl = 1000 kN/m2
kl = 2000 kN/m2
(d) Aceleracao do oscilador.
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
100
t/τ
r (k
N)
kl = 250 kN/m2
kl = 500 kN/m2
kl = 1000 kN/m2
kl = 2000 kN/m2
(e) Forca de contacto.
Figura 3.8: Efeito da rigidez da fundacao para v = 200 m/s, L = 200 m, p = 5 rad/s, ζ = 0% e m2 = 0.
26

0 0.2 0.4 0.6 0.8 1−4
−2
0
2
4
6
t/τ
φ w
kl = 250 kN/m2
kl = 500 kN/m2
kl = 1000 kN/m2
kl = 2000 kN/m2
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.2 0.4 0.6 0.8 1−4
−3
−2
−1
0
1
2
3
4
5
t/τ
φ M
kl = 250 kN/m2
kl = 500 kN/m2
kl = 1000 kN/m2
kl = 2000 kN/m2
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.2 0.4 0.6 0.8 1−0.5
0
0.5
t/τ
y (m
/s)
kl = 250 kN/m2
kl = 500 kN/m2
kl = 1000 kN/m2
kl = 2000 kN/m2
(c) Deslocamento do oscilador.
0 0.2 0.4 0.6 0.8 1−10
−5
0
5
10
15
20
t/τ
a (m
/s2 )
kl = 250 kN/m2
kl = 500 kN/m2
kl = 1000 kN/m2
kl = 2000 kN/m2
(d) Aceleracao do oscilador.
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
100
t/τ
r (k
N)
kl = 250 kN/m2
kl = 500 kN/m2
kl = 1000 kN/m2
kl = 2000 kN/m2
(e) Forca de contacto.
Figura 3.9: Efeito da rigidez da fundacao para v = 200 m/s, L = 200 m, p = 10 rad/s, ζ = 0% e m2 = 0.
0 0.2 0.4 0.6 0.8 1−4
−2
0
2
4
6
t/τ
φ w
kl = 250 kN/m2
kl = 500 kN/m2
kl = 1000 kN/m2
kl = 2000 kN/m2
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.2 0.4 0.6 0.8 1−4
−3
−2
−1
0
1
2
3
4
5
t/τ
φ M
kl = 250 kN/m2
kl = 500 kN/m2
kl = 1000 kN/m2
kl = 2000 kN/m2
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.2 0.4 0.6 0.8 1−0.5
0
0.5
t/τ
y (m
/s)
kl = 250 kN/m2
kl = 500 kN/m2
kl = 1000 kN/m2
kl = 2000 kN/m2
(c) Deslocamento do oscilador.
0 0.2 0.4 0.6 0.8 1−10
−5
0
5
10
15
20
t/τ
a (m
/s2 )
kl = 250 kN/m2
kl = 500 kN/m2
kl = 1000 kN/m2
kl = 2000 kN/m2
(d) Aceleracao do oscilador.
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
100
t/τ
r (k
N)
kl = 250 kN/m2
kl = 500 kN/m2
kl = 1000 kN/m2
kl = 2000 kN/m2
(e) Forca de contacto.
Figura 3.10: Efeito da rigidez da fundacao para v = 200 m/s, L = 200 m, p = 25 rad/s, ζ = 0% e m2 = 0.
27

0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−5
−4
−3
−2
−1
0
1
2
3
4
5
6
t/τ
φ w
v = 50 m/sv = 100 m/sv = 150 m/sv = 200 m/s
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−5
−4
−3
−2
−1
0
1
2
3
4
5
6
t/τ
φ M
v = 50 m/sv = 100 m/sv = 150 m/sv = 200 m/s
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−0.5
−0.4
−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
t/τ
y (m
/s)
v = 50 m/sv = 100 m/sv = 150 m/sv = 200 m/s
(c) Deslocamento do oscilador.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−10
−5
0
5
10
15
20
t/τ
a (m
/s2 )
v = 50 m/sv = 100 m/sv = 150 m/sv = 200 m/s
(d) Aceleracao do oscilador.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−150
−100
−50
0
50
100
t/τ
r (k
N)
v = 50 m/sv = 100 m/sv = 150 m/sv = 200 m/s
(e) Forca de contacto.
Figura 3.11: Efeito da velocidade do oscilador para kl = 250 kN/m2, L = 200 m, p = 5 rad/s, ζ = 0% em2 = 0.
0 0.2 0.4 0.6 0.8 1
−4
−2
0
2
4
6
t/τ
φ w
v = 50 m/sv = 100 m/sv = 150 m/sv = 200 m/s
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.2 0.4 0.6 0.8 1
−4
−2
0
2
4
6
t/τ
φ M
v = 50 m/sv = 100 m/sv = 150 m/sv = 200 m/s
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.2 0.4 0.6 0.8 1−0.5
0
0.5
t/τ
y (m
/s)
v = 50 m/sv = 100 m/sv = 150 m/sv = 200 m/s
(c) Deslocamento do oscilador.
0 0.2 0.4 0.6 0.8 1−10
−5
0
5
10
15
20
t/τ
a (m
/s2 )
v = 50 m/sv = 100 m/sv = 150 m/sv = 200 m/s
(d) Aceleracao do oscilador.
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
100
t/τ
r (k
N)
v = 50 m/sv = 100 m/sv = 150 m/sv = 200 m/s
(e) Forca de contacto.
Figura 3.12: Efeito da velocidade do oscilador para kl = 250 kN/m2, L = 200 m, p = 10 rad/s, ζ = 0% em2 = 0.
28

0 0.2 0.4 0.6 0.8 1
−4
−2
0
2
4
6
t/τ
φ w
v = 50 m/sv = 100 m/sv = 150 m/sv = 200 m/s
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.2 0.4 0.6 0.8 1
−4
−2
0
2
4
6
t/τ
φ M
v = 50 m/sv = 100 m/sv = 150 m/sv = 200 m/s
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.2 0.4 0.6 0.8 1−0.5
0
0.5
t/τ
y (m
/s)
v = 50 m/sv = 100 m/sv = 150 m/sv = 200 m/s
(c) Deslocamento do oscilador.
0 0.2 0.4 0.6 0.8 1−10
−5
0
5
10
15
20
t/τ
a (m
/s2 )
v = 50 m/sv = 100 m/sv = 150 m/sv = 200 m/s
(d) Aceleracao do oscilador.
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
100
t/τ
r (k
N)
v = 50 m/sv = 100 m/sv = 150 m/sv = 200 m/s
(e) Forca de contacto.
Figura 3.13: Efeito da velocidade do oscilador para kl = 250 kN/m2, L = 200 m, p = 25 rad/s, ζ = 0% em2 = 0.
0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ w
v = 50 m/sv = 100 m/sv = 150 m/sv = 200 m/s
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ M
v = 50 m/sv = 100 m/sv = 150 m/sv = 200 m/s
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.2 0.4 0.6 0.8 1−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
t/τ
y (m
/s)
v = 50 m/sv = 100 m/sv = 150 m/sv = 200 m/s
(c) Deslocamento do oscilador.
0 0.2 0.4 0.6 0.8 1−10
−5
0
5
10
15
20
t/τ
a (m
/s2 )
v = 50 m/sv = 100 m/sv = 150 m/sv = 200 m/s
(d) Aceleracao do oscilador.
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
100
t/τ
r (k
N)
v = 50 m/sv = 100 m/sv = 150 m/sv = 200 m/s
(e) Forca de contacto.
Figura 3.14: Efeito da velocidade do oscilador para kl = 1000 kN/m2, L = 200 m, p = 5 rad/s, ζ = 0% em2 = 0.
29

0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ w
v = 50 m/sv = 100 m/sv = 150 m/sv = 200 m/s
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ M
v = 50 m/sv = 100 m/sv = 150 m/sv = 200 m/s
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.2 0.4 0.6 0.8 1−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
t/τ
y (m
/s)
v = 50 m/sv = 100 m/sv = 150 m/sv = 200 m/s
(c) Deslocamento do oscilador.
0 0.2 0.4 0.6 0.8 1−10
−5
0
5
10
15
20
t/τ
a (m
/s2 )
v = 50 m/sv = 100 m/sv = 150 m/sv = 200 m/s
(d) Aceleracao do oscilador.
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
100
t/τ
r (k
N)
v = 50 m/sv = 100 m/sv = 150 m/sv = 200 m/s
(e) Forca de contacto.
Figura 3.15: Efeito da velocidade do oscilador para kl = 1000 kN/m2, L = 200 m, p = 10 rad/s, ζ = 0%e m2 = 0.
0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ w
v = 50 m/sv = 100 m/sv = 150 m/sv = 200 m/s
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ M
v = 50 m/sv = 100 m/sv = 150 m/sv = 200 m/s
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.2 0.4 0.6 0.8 1−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
t/τ
y (m
/s)
v = 50 m/sv = 100 m/sv = 150 m/sv = 200 m/s
(c) Deslocamento do oscilador.
0 0.2 0.4 0.6 0.8 1−10
−5
0
5
10
15
20
t/τ
a (m
/s2 )
v = 50 m/sv = 100 m/sv = 150 m/sv = 200 m/s
(d) Aceleracao do oscilador.
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
100
t/τ
r (k
N)
v = 50 m/sv = 100 m/sv = 150 m/sv = 200 m/s
(e) Forca de contacto.
Figura 3.16: Efeito da velocidade do oscilador para kl = 1000 kN/m2, L = 200 m, p = 25 rad/s, ζ = 0%e m2 = 0.
30

0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ w
L = 50 mL = 100 mL = 200 mL = 300 m
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ M
L = 50 mL = 100 mL = 200 mL = 300 m
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.2 0.4 0.6 0.8 1−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
t/τ
y (m
/s)
L = 50 mL = 100 mL = 200 mL = 300 m
(c) Deslocamento do oscilador.
0 0.2 0.4 0.6 0.8 1−10
−5
0
5
10
15
20
t/τ
a (m
/s2 )
L = 50 mL = 100 mL = 200 mL = 300 m
(d) Aceleracao do oscilador.
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
100
t/τ
r (k
N)
L = 50 mL = 100 mL = 200 mL = 300 m
(e) Forca de contacto.
Figura 3.17: Efeito do comprimento da viga para kl = 250 kN/m2, v = 100 m/s, p = 5 rad/s, ζ = 0% em2 = 0.
0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ w
L = 50 mL = 100 mL = 200 mL = 300 m
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ M
L = 50 mL = 100 mL = 200 mL = 300 m
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.2 0.4 0.6 0.8 1−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
t/τ
y (m
/s)
L = 50 mL = 100 mL = 200 mL = 300 m
(c) Deslocamento do oscilador.
0 0.2 0.4 0.6 0.8 1−10
−5
0
5
10
15
20
t/τ
a (m
/s2 )
L = 50 mL = 100 mL = 200 mL = 300 m
(d) Aceleracao do oscilador.
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
100
t/τ
r (k
N)
L = 50 mL = 100 mL = 200 mL = 300 m
(e) Forca de contacto.
Figura 3.18: Efeito do comprimento da viga para kl = 250 kN/m2, v = 100 m/s, p = 10 rad/s, ζ = 0% em2 = 0.
31

0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ w
L = 50 mL = 100 mL = 200 mL = 300 m
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ M
L = 50 mL = 100 mL = 200 mL = 300 m
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.2 0.4 0.6 0.8 1−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
t/τ
y (m
/s)
L = 50 mL = 100 mL = 200 mL = 300 m
(c) Deslocamento do oscilador.
0 0.2 0.4 0.6 0.8 1−10
−5
0
5
10
15
20
t/τ
a (m
/s2 )
L = 50 mL = 100 mL = 200 mL = 300 m
(d) Aceleracao do oscilador.
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
100
t/τ
r (k
N)
L = 50 mL = 100 mL = 200 mL = 300 m
(e) Forca de contacto.
Figura 3.19: Efeito do comprimento da viga para kl = 250 kN/m2, v = 100 m/s, p = 25 rad/s, ζ = 0% em2 = 0.
0 0.2 0.4 0.6 0.8 1
−4
−2
0
2
4
6
t/τ
φ w
L = 50 mL = 100 mL = 200 mL = 300 m
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.2 0.4 0.6 0.8 1
−4
−2
0
2
4
6
t/τ
φ M
L = 50 mL = 100 mL = 200 mL = 300 m
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.2 0.4 0.6 0.8 1−0.5
0
0.5
t/τ
y (m
/s)
L = 50 mL = 100 mL = 200 mL = 300 m
(c) Deslocamento do oscilador.
0 0.2 0.4 0.6 0.8 1−10
−5
0
5
10
15
20
t/τ
a (m
/s2 )
L = 50 mL = 100 mL = 200 mL = 300 m
(d) Aceleracao do oscilador.
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
100
t/τ
r (k
N)
L = 50 mL = 100 mL = 200 mL = 300 m
(e) Forca de contacto.
Figura 3.20: Efeito do comprimento da viga para kl = 250 kN/m2, v = 200 m/s, p = 5 rad/s, ζ = 0% em2 = 0.
32

0 0.2 0.4 0.6 0.8 1
−4
−2
0
2
4
6
t/τ
φ w
L = 50 mL = 100 mL = 200 mL = 300 m
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.2 0.4 0.6 0.8 1
−4
−2
0
2
4
6
t/τ
φ M
L = 50 mL = 100 mL = 200 mL = 300 m
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.2 0.4 0.6 0.8 1−0.5
0
0.5
t/τ
y (m
/s)
L = 50 mL = 100 mL = 200 mL = 300 m
(c) Deslocamento do oscilador.
0 0.2 0.4 0.6 0.8 1−10
−5
0
5
10
15
20
t/τ
a (m
/s2 )
L = 50 mL = 100 mL = 200 mL = 300 m
(d) Aceleracao do oscilador.
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
100
t/τ
r (k
N)
L = 50 mL = 100 mL = 200 mL = 300 m
(e) Forca de contacto.
Figura 3.21: Efeito do comprimento da viga para kl = 250 kN/m2, v = 200 m/s, p = 10 rad/s, ζ = 0% em2 = 0.
0 0.2 0.4 0.6 0.8 1
−4
−2
0
2
4
6
t/τ
φ w
L = 50 mL = 100 mL = 200 mL = 300 m
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.2 0.4 0.6 0.8 1
−4
−2
0
2
4
6
t/τ
φ M
L = 50 mL = 100 mL = 200 mL = 300 m
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.2 0.4 0.6 0.8 1−0.5
0
0.5
t/τ
y (m
/s)
L = 50 mL = 100 mL = 200 mL = 300 m
(c) Deslocamento do oscilador.
0 0.2 0.4 0.6 0.8 1−10
−5
0
5
10
15
20
t/τ
a (m
/s2 )
L = 50 mL = 100 mL = 200 mL = 300 m
(d) Aceleracao do oscilador.
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
100
t/τ
r (k
N)
L = 50 mL = 100 mL = 200 mL = 300 m
(e) Forca de contacto.
Figura 3.22: Efeito do comprimento da viga para kl = 250 kN/m2, v = 200 m/s, p = 25 rad/s, ζ = 0% em2 = 0.
33

0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ w
L = 50 mL = 100 mL = 200 mL = 300 m
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ M
L = 50 mL = 100 mL = 200 mL = 300 m
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.2 0.4 0.6 0.8 1−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
t/τ
y (m
/s)
L = 50 mL = 100 mL = 200 mL = 300 m
(c) Deslocamento do oscilador.
0 0.2 0.4 0.6 0.8 1−10
−5
0
5
10
15
20
t/τ
a (m
/s2 )
L = 50 mL = 100 mL = 200 mL = 300 m
(d) Aceleracao do oscilador.
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
100
t/τ
r (k
N)
L = 50 mL = 100 mL = 200 mL = 300 m
(e) Forca de contacto.
Figura 3.23: Efeito do comprimento da viga para kl = 1000 kN/m2, v = 100 m/s, p = 5 rad/s, ζ = 0% em2 = 0.
0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ w
L = 50 mL = 100 mL = 200 mL = 300 m
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ M
L = 50 mL = 100 mL = 200 mL = 300 m
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.2 0.4 0.6 0.8 1−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
t/τ
y (m
/s)
L = 50 mL = 100 mL = 200 mL = 300 m
(c) Deslocamento do oscilador.
0 0.2 0.4 0.6 0.8 1−10
−5
0
5
10
15
20
t/τ
a (m
/s2 )
L = 50 mL = 100 mL = 200 mL = 300 m
(d) Aceleracao do oscilador.
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
100
t/τ
r (k
N)
L = 50 mL = 100 mL = 200 mL = 300 m
(e) Forca de contacto.
Figura 3.24: Efeito do comprimento da viga para kl = 1000 kN/m2, v = 100 m/s, p = 10 rad/s, ζ = 0% em2 = 0.
34

0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ w
L = 50 mL = 100 mL = 200 mL = 300 m
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ M
L = 50 mL = 100 mL = 200 mL = 300 m
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.2 0.4 0.6 0.8 1−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
t/τ
y (m
/s)
L = 50 mL = 100 mL = 200 mL = 300 m
(c) Deslocamento do oscilador.
0 0.2 0.4 0.6 0.8 1−10
−5
0
5
10
15
20
t/τ
a (m
/s2 )
L = 50 mL = 100 mL = 200 mL = 300 m
(d) Aceleracao do oscilador.
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
100
t/τ
r (k
N)
L = 50 mL = 100 mL = 200 mL = 300 m
(e) Forca de contacto.
Figura 3.25: Efeito do comprimento da viga para kl = 1000 kN/m2, v = 100 m/s, p = 25 rad/s, ζ = 0% em2 = 0.
0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ w
L = 50 mL = 100 mL = 200 mL = 300 m
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ M
L = 50 mL = 100 mL = 200 mL = 300 m
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.2 0.4 0.6 0.8 1−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
t/τ
y (m
/s)
L = 50 mL = 100 mL = 200 mL = 300 m
(c) Deslocamento do oscilador.
0 0.2 0.4 0.6 0.8 1−10
−5
0
5
10
15
20
t/τ
a (m
/s2 )
L = 50 mL = 100 mL = 200 mL = 300 m
(d) Aceleracao do oscilador.
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
100
t/τ
r (k
N)
L = 50 mL = 100 mL = 200 mL = 300 m
(e) Forca de contacto.
Figura 3.26: Efeito do comprimento da viga para kl = 1000 kN/m2, v = 200 m/s, p = 5 rad/s, ζ = 0% em2 = 0.
35

0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ w
L = 50 mL = 100 mL = 200 mL = 300 m
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ M
L = 50 mL = 100 mL = 200 mL = 300 m
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.2 0.4 0.6 0.8 1−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
t/τ
y (m
/s)
L = 50 mL = 100 mL = 200 mL = 300 m
(c) Deslocamento do oscilador.
0 0.2 0.4 0.6 0.8 1−10
−5
0
5
10
15
20
t/τ
a (m
/s2 )
L = 50 mL = 100 mL = 200 mL = 300 m
(d) Aceleracao do oscilador.
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
100
t/τ
r (k
N)
L = 50 mL = 100 mL = 200 mL = 300 m
(e) Forca de contacto.
Figura 3.27: Efeito do comprimento da viga para kl = 1000 kN/m2, v = 200 m/s, p = 10 rad/s, ζ = 0% em2 = 0.
0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ w
L = 50 mL = 100 mL = 200 mL = 300 m
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ M
L = 50 mL = 100 mL = 200 mL = 300 m
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.2 0.4 0.6 0.8 1−0.2
−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
t/τ
y (m
/s)
L = 50 mL = 100 mL = 200 mL = 300 m
(c) Deslocamento do oscilador.
0 0.2 0.4 0.6 0.8 1−10
−5
0
5
10
15
20
t/τ
a (m
/s2 )
L = 50 mL = 100 mL = 200 mL = 300 m
(d) Aceleracao do oscilador.
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
100
t/τ
r (k
N)
L = 50 mL = 100 mL = 200 mL = 300 m
(e) Forca de contacto.
Figura 3.28: Efeito do comprimento da viga para kl = 1000 kN/m2, v = 200 m/s, p = 25 rad/s, ζ = 0% em2 = 0.
36

Capıtulo 4
Fundacao nao linear
Neste e nos proximos capıtulos dedicar-nos-emos ao estudo dos efeitos de nao linearidades da
fundacao no comportamento da viga e do oscilador. Tal como no capıtulo anterior, os estudos pa-
rametricos incidirao sobre os deslocamentos e momentos fletores da viga, o deslocamento e aceleracao
do oscilador e a forca de contacto entre o oscilador e a viga.
4.1 Teoria e formulacao do problema
Neste capıtulo consideramos que a forca de reacao por unidade de comprimento que a fundacao aplica
a face inferior da viga e constituıda por uma parcela linear e uma parcela nao linear como esta repre-
sentado na Figura 4.1,isto e
Ff = Fl + Fnl = klw + knlw3, (4.1)
sendo a energia de deformacao elastica por unidade de comprimento da fundacao dada por
uf =
∫ w
0
Ffdw =1
2klw
2 +1
4knlw
4. (4.2)
Figura 4.1: Fundacao nao linear do tipo cubica: representacao grafica da forca de reacao em funcao dodeslocamento.
37

Aproximando o campo de deslocamentos we em cada elemento finito por uma funcao cubica (2.6), a
energia de deformacao elastica acumulada da fundacao no comprimento l de um elemento finito e dada
por
Uf =
∫ l
0
ufdx =
∫ l
0
{1
2kl[N
e(x)de]2 +1
4knl[N
e(x)de]4}dx. (4.3)
4.2 Dinamica de vigas sobre fundacao elastica nao linear
Nesta seccao deduz-se o sistema de equacoes diferenciais similar ao apresentado no Capitulo 3, de
forma a aplicar-se o metodo-α de integracao no tempo. Derivando a energia potencial elastica (4.3) em
ordem a de, obtem-se as forcas internas associadas a fundacao:
∂Uf∂de
=
∫ l
0
NeT(x)klNe(x)de + NeT(x)knl[N
e(x)de]3dx. (4.4)
Existem duas parcelas, uma que e linear e a outra que depende nao linearmente de de. Esta segunda
parcela designa-se por Qenl(d
e). A parte da matriz de rigidez tangente que advem da fundacao elastica
e∂2Uf∂de∂de
=
∫ l
0
NeT(x)klNe(x)dx+
∫ l
0
3NeT(x)knl[Ne(x)de]2Ne(x)dx. (4.5)
A primeira parcela e a matriz de rigidez da fundacao Kef ja deduzida para a fundacao linear (3.7), que
e independente de de. A segunda parcela da matriz de rigidez da fundacao depende quadraticamente
dos deslocamentos nodais. O sistema de equacoes que rege o movimento do modelo de elementos
finitos de uma viga em fundacao elastica apoiado numa fundacao nao linear de Winkler sera entaoM +m2NT (x0)N(x0) 0
0T m1
d
y
+
C + cNT(x0)N(x0) + 2m2vNT(x0)N′(x0) −cNT(x0)
−cN(x0) c
d
y
+
K + kNT(x0)N(x0) + cvNT(x0)N′(x0) +m2v2NT(x0)N′′(x0) −kNT(x0)
−kN(x0)− cvN′(x0) k
d
y
+
Qnl(d)
0
=
P− (m1 +m2)gNT(x0)
0
. (4.6)
O sistema anterior e em quase tudo igual ao sistema (2.13) obtido para o caso da fundacao linear.
As equacoes (4.6) que regem o caso da fundacao nao linear contem o termo QTnl = {QT
nl(d) 0}T,
quadratico em d. Para resolucao do sistema (4.6) utiliza-se o metodo-α, descrito no Capıtulo 3. O vetor
das forcas internas p contem tambem a parcela Qnl(d),
p = Cq + Kq + Qnl(q), (4.7)
38

em que q = {dT y}T. Note-se que o vetor das forcas internas depende dos deslocamentos nodais d,
pelo que e necessario corrigi-las em cada iteracao i do metodo. Outra particularidade e o calculo da
matriz de rigidez efetiva no passo 4 (ver o algoritmo na Seccao 3.4) do metodo de integracao que se
obtem pela soma da parte linear com a parte nao linear, tal que
K =
K + Knl(d) + kNT(x0)N(x0) + cvNT(x0)N′(x0) +m2v2NT(x0)N′′(x0) −kNT(x0)
−kN(x0)− cvN′(x0) k
(4.8)
em que
Knl(d) =∂Qnl(d)
∂d. (4.9)
4.3 Resultados e comentarios
Nesta seccao pretende-se estudar a influencia da parcela nao linear de rigidez da fundacao no com-
portamento dinamico gerado pela passagem de um oscilador em movimento uniforme. Apresentam-se
resultados homologos aos obtidos no Capıtulo 3. Adota-se os mesmos tres osciladores (p= 5 rad/s,
p= 10 rad/s e p= 25 rad/s), o mesmo tipo de carril (UIC60) e o mesmo comprimento de viga simples-
mente apoiada (200 m). Considerou-se igualmente m2 = 0. A malha de elementos finitos e sempre
composta por 400 elementos. Desprezou-se o peso proprio da viga.
4.3.1 Identificacao da velocidade crıtica
Nesta seccao apresenta-se um estudo sobre a influencia da parcela nao linear da lei constitutiva da
fundacao (i) na atenuacao dos deslocamentos maximos da viga, do deslocamento e aceleracao maxima
do oscilador e da forca maxima no contacto oscilador-viga e (ii) no valor da velocidade crıtica do oscila-
dor na vizinhanca da qual os valores maximos sao mais elevados. As figuras que e pertinente incluir na
analise que se segue estao indicadas na Tabela 4.1. Incluıram-se as Figuras 3.1 a 3.4 do Capıtulo 3 uma
vez que ilustram o caso limite de anulamento da parcela nao linear da fundacao. Na Tabela 4.1 podem-
se identificar dois grandes grupos de figuras: as das oito ultimas linhas correspondem a duplicacao dos
coeficientes de rigidez elastica do grupo de figuras das oito primeiras linhas. Analisando primeiramente
as Figuras 3.1 e 4.2 a 4.4 observamos o efeito que a nao linearidade cubica tem na diminuicao dos
valores maximos dos deslocamentos, aceleracao e forca. Nesse grupo de figuras nota-se tambem o
aumento do valor da velocidade crıtica com o valor de knl. Para o valor mais elevado de knl (Figura
4.4) a velocidade crıtica excede 300 m/s pelo que nos graficos dos deslocamentos maximos (a) e (b)
ha uma quase coincidencia entre os tres osciladores (p = 5, 10, 25, rad/s). Tal como no caso de uma
fundacao linear, verifica-se a ocorrencia de instabilidade dinamica para uma certa gama de velocidades
superior a velocidade crıtica. Verifica-se igualmente que os deslocamentos maximos no segundo pico
tambem diminuem com o aumento da nao linearidade e que a gama de velocidades para a qual ocorre
o segundo pico tambem aumenta para valores mais elevados de knl. Tal como foi observado no caso
linear, tambem no caso nao linear so ocorrem deslocamentos positivos do oscilador para velocidades
39

Tabela 4.1: Parametros da fundacao assumidos nas Figuras 3.1 a 3.4 e 4.2 a 4.13.
Figura kl (kN/m2) knl (kN/m4) ζ
3.1 250 0 0
4.2 250 2.5× 103 0
4.3 250 2.5× 104 0
4.4 250 2.5× 105 0
3.2 250 0 0.02
4.5 250 2.5× 103 0.02
4.6 250 2.5× 104 0.02
4.7 250 2.5× 105 0.02
3.3 500 0 0
4.8 500 5× 103 0
4.9 500 5× 104 0
4.10 500 5× 105 0
3.4 500 0 0.02
4.11 500 5× 103 0.02
4.12 500 5× 104 0.02
4.13 500 5× 105 0.02
supercrıticas. Para o oscilador com frequencia natural mais elevada verificam-se aceleracoes maximas
e forcas de contacto maximas altas mesmo para velocidades subcrıticas afastadas da velocidade crıtica.
A comparacao dos pares de figuras (3.1, 3.2), (4.2, 4.5), (4.3, 4.6) e (4.4, 4.7) permite-nos quantificar
o efeito atenuador da introducao de um amortecimento viscoso na fundacao. A observacao atenta dos
graficos (a) dos pares de figuras (4.2, 4.5), (4.3, 4.6) e (4.4, 4.7), com especial enfase nos dois ultimos,
permite-nos concluir que o amortecimento viscoso combinado com um comportamento nao linear da
fundacao tem o efeito de reduzir a velocidade crıtica, pelo menos para o nıvel kl = 250 kN/m2 da
parcela linear da rigidez da fundacao.
Podemos tambem comparar os pares de figuras (3.1, 3.3), (4.2, 4.8), (4.3, 4.9), etc, em que os
graficos de uma figura correspondem ao dobro dos valores dos coeficientes de rigidez kl e knl da ou-
tra, permitindo-nos concluir que o efeito atenuador de amplitudes mais intenso ocorre para o oscilador
mais rıgido, isto e, com uma frequencia angular mais elevada (p = 25 rad/s). No caso amortecido,
verifica-se igualmente o desaparecimento do segundo pico correspondente a ocorrencia de instabili-
dade dinamica para os dois osciladores menos rıgidos. Nas Tabelas 4.2 e 4.3 apresentam-se os deslo-
camentos maximos positivo e negativo com e sem amortecimento para os tres diferentes osciladores e
as velocidades crıticas a que tais extremos ocorrem.
40

Tabela 4.2: Picos dos deslocamentos maximos para fundacao linear uniforme com kl = 250 kN/m2.As propriedades do carril estao na Tabela 3.1.
p (rad/s) knl (kN/m4)ζ = 0 ζ = 0.02
v (m/s) wmax (m) v (m/s) wmax (m)
5
0210 0.564 209 0.317
204 −0.521 205 −0.326
2.5× 103218 0.360 218 0.241
224 −0.329 213 −0.243
2.5× 104249 0.200 237 0.150
245 −0.186 239 −0.151
2.5× 105293 0.104 287 0.084
289 −0.104 278 −0.085
10
0210 0.579 208 0.305
211 −0.534 206 −0.302
2.5× 103218 0.368 218 0.235
224 −0.339 216 −0.219
2.5× 104249 0.205 237 0.148
244 −0.192 244 −0.141
2.5× 105294 0.107 287 0.087
288 −0.103 293 −0.081
25
0210 0.587 208 0.309
204 −0.598 204 −0.375
2.5× 103218 0.383 217 0.240
217 −0.364 211 −0.275
2.5× 104249 0.213 237 0.151
248 −0.209 231 −0.168
2.5× 105294 0.112 285 0.089
299 −0.105 70 −0.090
41

Tabela 4.3: Picos dos deslocamentos maximos para fundacao linear uniforme com kl = 500 kN/m2.As propriedades do carril estao na Tabela 3.1.
p (rad/s) knl (kN/m4)ζ = 0 ζ = 0.02
v (m/s) wmax (m) v (m/s) wmax (m)
5
0249 0.372 248 0.190
245 −0.353 245 −0.207
5× 103253 0.274 252 0.165
251 −0.255 249 −0.174
5× 104278 0.157 268 0.113
275 −0.145 267 −0.117
5× 105300 0.063 300 0.062
297 −0.070 300 −0.066
10
0249 0.383 248 0.186
250 −0.359 246 −0.181
5× 103253 0.281 253 0.162
258 −0.260 250 −0.151
5× 104279 0.161 267 0.110
275 −0.150 274 −0.105
5× 105300 0.065 300 0.063
297 −0.068 296 −0.060
25
0249 0.387 248 0.188
244 −0.370 244 −0.217
5× 103253 0.289 253 0.165
258 −0.273 248 −0.183
5× 104279 0.168 271 0.111
274 −0.156 261 −0.121
5× 105300 0.070 299 0.067
296 −0.072 298 −0.066
42

50 100 150 200 250 300−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
v (m/s)
wm
ax (
m)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(a) Deslocamento maximo na viga em funcao davelocidade do oscilador.
50 100 150 200 250 300−0.5
0
0.5
v (m/s)
y max
(m
)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(b) Deslocamento maximo do oscilador em funcaoda velocidade do oscilador.
50 100 150 200 250 300−1500
−1000
−500
0
500
1000
1500
v (m/s)
a max
(m
/s2 )
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(c) Aceleracao maxima do oscilador em funcao davelocidade do oscilador.
50 100 150 200 250 300−1
−0.5
0
0.5
1x 10
4
v (m/s)
r (k
N)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(d) Forca maxima de contacto em funcao da velo-cidade do oscilador.
Figura 4.2: Resultados para uma fundacao uniforme com knl= 2.5 × 103 kN/m4, kl= 250 kN/m2, semamortecimento.
50 100 150 200 250 300−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
v (m/s)
wm
ax (
m)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(a) Deslocamento maximo na viga em funcao davelocidade do oscilador.
50 100 150 200 250 300−0.5
0
0.5
v (m/s)
y max
(m
)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(b) Deslocamento maximo do oscilador em funcaoda velocidade do oscilador.
50 100 150 200 250 300−1500
−1000
−500
0
500
1000
1500
v (m/s)
a max
(m
/s2 )
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(c) Aceleracao maxima do oscilador em funcao davelocidade do oscilador.
50 100 150 200 250 300−1
−0.5
0
0.5
1x 10
4
v (m/s)
r (k
N)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(d) Forca maxima de contacto em funcao da velo-cidade do oscilador.
Figura 4.3: Resultados para uma fundacao uniforme com knl= 2.5 × 104 kN/m4, kl= 250 kN/m2, semamortecimento.
43

50 100 150 200 250 300−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
v (m/s)
wm
ax (
m)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(a) Deslocamento maximo na viga em funcao davelocidade do oscilador.
50 100 150 200 250 300−0.5
0
0.5
v (m/s)
y max
(m
)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(b) Deslocamento maximo do oscilador em funcaoda velocidade do oscilador.
50 100 150 200 250 300−1500
−1000
−500
0
500
1000
1500
v (m/s)
a max
(m
/s2 )
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(c) Aceleracao maxima do oscilador em funcao davelocidade do oscilador.
50 100 150 200 250 300−1
−0.5
0
0.5
1x 10
4
v (m/s)
r (k
N)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(d) Forca maxima de contacto em funcao da velo-cidade do oscilador.
Figura 4.4: Resultados para uma fundacao uniforme com knl= 2.5 × 105 kN/m4, kl= 250 kN/m2, semamortecimento.
50 100 150 200 250 300−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
v (m/s)
wm
ax (
m)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(a) Deslocamento maximo na viga em funcao davelocidade do oscilador.
50 100 150 200 250 300−0.5
0
0.5
v (m/s)
y max
(m
)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(b) Deslocamento maximo do oscilador em funcaoda velocidade do oscilador.
50 100 150 200 250 300−1500
−1000
−500
0
500
1000
1500
v (m/s)
a max
(m
/s2 )
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(c) Aceleracao maxima do oscilador em funcao davelocidade do oscilador.
50 100 150 200 250 300−1
−0.5
0
0.5
1x 10
4
v (m/s)
r (k
N)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(d) Forca maxima de contacto em funcao da velo-cidade do oscilador.
Figura 4.5: Resultados para uma fundacao uniforme com knl= 2.5 × 103 kN/m4, kl= 250 kN/m2, comamortecimento ζ= 2%.
44

50 100 150 200 250 300−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
v (m/s)
wm
ax (
m)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(a) Deslocamento maximo na viga em funcao davelocidade do oscilador.
50 100 150 200 250 300−0.5
0
0.5
v (m/s)
y max
(m
)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(b) Deslocamento maximo do oscilador em funcaoda velocidade do oscilador.
50 100 150 200 250 300−1500
−1000
−500
0
500
1000
1500
v (m/s)
a max
(m
/s2 )
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(c) Aceleracao maxima do oscilador em funcao davelocidade do oscilador.
50 100 150 200 250 300−1
−0.5
0
0.5
1x 10
4
v (m/s)
r (k
N)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(d) Forca maxima de contacto em funcao da velo-cidade do oscilador.
Figura 4.6: Resultados para uma fundacao uniforme com knl= 2.5 × 104 kN/m4, kl= 250 kN/m2, comamortecimento ζ= 2%.
50 100 150 200 250 300−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
v (m/s)
wm
ax (
m)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(a) Deslocamento maximo na viga em funcao davelocidade do oscilador.
50 100 150 200 250 300−0.5
0
0.5
v (m/s)
y max
(m
)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(b) Deslocamento maximo do oscilador em funcaoda velocidade do oscilador.
50 100 150 200 250 300−1500
−1000
−500
0
500
1000
1500
v (m/s)
a max
(m
/s2 )
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(c) Aceleracao maxima do oscilador em funcao davelocidade do oscilador.
50 100 150 200 250 300−1
−0.5
0
0.5
1x 10
4
v (m/s)
r (k
N)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(d) Forca maxima de contacto em funcao da velo-cidade do oscilador.
Figura 4.7: Resultados para uma fundacao uniforme com knl= 2.5 × 105 kN/m4, kl= 250 kN/m2, comamortecimento ζ= 2%.
45

50 100 150 200 250 300−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
v (m/s)
wm
ax (
m)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(a) Deslocamento maximo na viga em funcao davelocidade do oscilador.
50 100 150 200 250 300−0.5
0
0.5
v (m/s)
y max
(m
)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(b) Deslocamento maximo do oscilador em funcaoda velocidade do oscilador.
50 100 150 200 250 300−1500
−1000
−500
0
500
1000
1500
v (m/s)
a max
(m
/s2 )
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(c) Aceleracao maxima do oscilador em funcao davelocidade do oscilador.
50 100 150 200 250 300−1
−0.5
0
0.5
1x 10
4
v (m/s)
r (k
N)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(d) Forca maxima de contacto em funcao da velo-cidade do oscilador.
Figura 4.8: Resultados para uma fundacao uniforme com knl= 5 × 103 kN/m4, kl= 500 kN/m2, semamortecimento.
50 100 150 200 250 300−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
v (m/s)
wm
ax (
m)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(a) Deslocamento maximo na viga em funcao davelocidade do oscilador.
50 100 150 200 250 300−0.5
0
0.5
v (m/s)
y max
(m
)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(b) Deslocamento maximo do oscilador em funcaoda velocidade do oscilador.
50 100 150 200 250 300−1500
−1000
−500
0
500
1000
1500
v (m/s)
a max
(m
/s2 )
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(c) Aceleracao maxima do oscilador em funcao davelocidade do oscilador.
50 100 150 200 250 300−1
−0.5
0
0.5
1x 10
4
v (m/s)
r (k
N)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(d) Forca maxima de contacto em funcao da velo-cidade do oscilador.
Figura 4.9: Resultados para uma fundacao uniforme com knl= 5 × 104 kN/m4, kl= 500 kN/m2, semamortecimento.
46

50 100 150 200 250 300−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
v (m/s)
wm
ax (
m)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(a) Deslocamento maximo na viga em funcao davelocidade do oscilador.
50 100 150 200 250 300−0.5
0
0.5
v (m/s)
y max
(m
)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(b) Deslocamento maximo do oscilador em funcaoda velocidade do oscilador.
50 100 150 200 250 300−1500
−1000
−500
0
500
1000
1500
v (m/s)
a max
(m
/s2 )
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(c) Aceleracao maxima do oscilador em funcao davelocidade do oscilador.
50 100 150 200 250 300−1
−0.5
0
0.5
1x 10
4
v (m/s)
r (k
N)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(d) Forca maxima de contacto em funcao da velo-cidade do oscilador.
Figura 4.10: Resultados para uma fundacao uniforme com knl= 5 × 105 kN/m4, kl= 500 kN/m2, semamortecimento.
50 100 150 200 250 300−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
v (m/s)
wm
ax (
m)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(a) Deslocamento maximo na viga em funcao davelocidade do oscilador.
50 100 150 200 250 300−0.5
0
0.5
v (m/s)
y max
(m
)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(b) Deslocamento maximo do oscilador em funcaoda velocidade do oscilador.
50 100 150 200 250 300−1500
−1000
−500
0
500
1000
1500
v (m/s)
a max
(m
/s2 )
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(c) Aceleracao maxima do oscilador em funcao davelocidade do oscilador.
50 100 150 200 250 300−1
−0.5
0
0.5
1x 10
4
v (m/s)
r (k
N)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(d) Forca maxima de contacto em funcao da velo-cidade do oscilador.
Figura 4.11: Resultados para uma fundacao uniforme com knl= 5 × 103 kN/m4, kl= 500 kN/m2, comamortecimento ζ= 2%.
47

50 100 150 200 250 300−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
v (m/s)
wm
ax (
m)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(a) Deslocamento maximo na viga em funcao davelocidade do oscilador.
50 100 150 200 250 300−0.5
0
0.5
v (m/s)
y max
(m
)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(b) Deslocamento maximo do oscilador em funcaoda velocidade do oscilador.
50 100 150 200 250 300−1500
−1000
−500
0
500
1000
1500
v (m/s)
a max
(m
/s2 )
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(c) Aceleracao maxima do oscilador em funcao davelocidade do oscilador.
50 100 150 200 250 300−1
−0.5
0
0.5
1x 10
4
v (m/s)
r (k
N)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(d) Forca maxima de contacto em funcao da velo-cidade do oscilador.
Figura 4.12: Resultados para uma fundacao uniforme com knl= 5 × 104 kN/m4, kl= 500 kN/m2, comamortecimento ζ= 2%.
50 100 150 200 250 300−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
v (m/s)
wm
ax (
m)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(a) Deslocamento maximo na viga em funcao davelocidade do oscilador.
50 100 150 200 250 300−0.5
0
0.5
v (m/s)
y max
(m
)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(b) Deslocamento maximo do oscilador em funcaoda velocidade do oscilador.
50 100 150 200 250 300−1500
−1000
−500
0
500
1000
1500
v (m/s)
a max
(m
/s2 )
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(c) Aceleracao maxima do oscilador em funcao davelocidade do oscilador.
50 100 150 200 250 300−1
−0.5
0
0.5
1x 10
4
v (m/s)
r (k
N)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(d) Forca maxima de contacto em funcao da velo-cidade do oscilador.
Figura 4.13: Resultados para uma fundacao uniforme com knl= 5 × 105 kN/m4, kl= 500 kN/m2, comamortecimento ζ= 2%.
48

4.3.2 Estudos Parametricos
Nesta seccao pretende-se estudar o efeito da parcela nao linear da rigidez da fundacao na evolucao
temporal da amplificacao de deslocamentos e do momento fletor na seccao de meio vao da viga, do
deslocamento e aceleracao do oscilador e da forca de contacto entre o oscilador e a viga. Para realizar
estes estudos utilizaram-se as mesmas propriedades do carril, refinamento da malha, passo temporal,
amortecimento e osciladores dos estudos apresentados na subseccao analoga do Capıtulo 3.
Tal como no capıtulo anterior, basearemos o estudo num conjunto de figuras, cada uma contendo
cinco graficos representando quantidades instantaneas (as mesmas do Capıtulo 3) em funcao da per-
centagem de tempo decorrida desde a entrada do oscilador na viga. A Tabela 4.4 sistematiza esse
conjunto de figuras, tendo-se assumido amortecimento da fundacao nulo (ζ = 0) e massa inferior
do oscilador nula (m2 = 0) em todos os casos. As amplificacoes dinamicas dos graficos (a) e (b)
calcularam-se em relacao ao caso estatico da fundacao linear tal como no Capıtulo 3 (3.18).
Tabela 4.4: Parametros assumidos nas Figuras 4.11 a 4.25.
Figura kl (kN/m2) v (m/s) p (rad/s)
4.14 250 100 5
4.15 250 100 10
4.16 250 100 25
4.17 250 200 5
4.18 250 200 10
4.19 250 200 25
4.20 500 100 5
4.21 500 100 10
4.22 500 100 25
4.23 500 200 5
4.24 500 200 10
4.25 500 200 25
No primeiro conjunto de tres figuras observa-se que uma maior rigidez/frequencia natural do oscila-
dor movel conduz a graficos de deslocamento (c) e aceleracao (d) do oscilador e da forca de contacto (e)
com mais oscilacoes. Valores mais elevados da rigidez nao linear da fundacao correspondem a valores
mais baixos de coeficientes de amplificacao dinamica de deslocamento e momento fletor. Quando se
considera uma velocidade do oscilador perto da velocidade crıtica do caso da fundacao linear (Figuras
4.17, 4.18 e 4.19) observamos que os fatores de amplificacao e as respostas em termos do movimento
da massa superior do oscilador e da forca de contacto aumentam, em especial quando a rigidez nao
linear da fundacao e mais baixa. O oscilador mais rıgido apresenta aceleracoes e forcas de contacto
de maior amplitude.
O conjunto de Figuras 4.20 a 4.25 corresponde a um coeficiente de rigidez linear kl duplo do conjunto
atras comentado. Para v = 100 m/s (Figuras 4.20 a 4.22) os resultados sao muito semelhantes aos dos
graficos das Figuras 4.14 a 4.16 uma vez que o aumento da rigidez linear da fundacao ainda faz afastar
49

mais a velocidade v = 100 m/s da velocidade crıtica. os graficos das Figuras 4.23, 4.24 e 4.25 exibem
respostas dinamicas mais significativas do que as das Figuras 4.20 a 4.22 uma vez que a velocidade
do oscilador v = 200 m/s e mais suscetıvel de excitar o sistema por, como vimos no Capıtulo 3, estar
mais proxima da velocidade crıtica da viga infinita em comportamento linear que, para kl = 500 kN/m2,
e 244.5 m/s (a partir da formula (3.19)). Observa-se igualmente que o oscilador mais rıgido apresenta
aceleracoes e forcas de contacto de maior amplitude.
0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ w
knl
= 2.5E3 kN/m4
knl
= 2.5E4 kN/m4
knl
= 2.5E5 kN/m4
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ M
knl
= 2.5E3 kN/m4
knl
= 2.5E4 kN/m4
knl
= 2.5E5 kN/m4
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.2 0.4 0.6 0.8 1−0.5
0
0.5
t/τ
y (m
/s)
knl
= 2.5E3 kN/m4
knl
= 2.5E4 kN/m4
knl
= 2.5E5 kN/m4
(c) Deslocamento do oscilador.
0 0.2 0.4 0.6 0.8 1−10
−5
0
5
10
15
20
t/τ
a (m
/s2 )
knl
= 2.5E3 kN/m4
knl
= 2.5E4 kN/m4
knl
= 2.5E5 kN/m4
(d) Aceleracao do oscilador.
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
100
t/τ
r (k
N)
knl
= 2.5E3 kN/m4
knl
= 2.5E4 kN/m4
knl
= 2.5E5 kN/m4
(e) Forca de contacto.
Figura 4.14: Efeito da parcela nao linear da rigidez da fundacao para v= 100 m/s, kl= 250 kN/m2,p= 5 rad/s e ζ= 0%.
0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ w
knl
= 2.5E3 kN/m4
knl
= 2.5E4 kN/m4
knl
= 2.5E5 kN/m4
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ M
knl
= 2.5E3 kN/m4
knl
= 2.5E4 kN/m4
knl
= 2.5E5 kN/m4
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.2 0.4 0.6 0.8 1−0.5
0
0.5
t/τ
y (m
/s)
knl
= 2.5E3 kN/m4
knl
= 2.5E4 kN/m4
knl
= 2.5E5 kN/m4
(c) Deslocamento do oscilador.
0 0.2 0.4 0.6 0.8 1−10
−5
0
5
10
15
20
t/τ
a (m
/s2 )
knl
= 2.5E3 kN/m4
knl
= 2.5E4 kN/m4
knl
= 2.5E5 kN/m4
(d) Aceleracao do oscilador.
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
100
t/τ
r (k
N)
knl
= 2.5E3 kN/m4
knl
= 2.5E4 kN/m4
knl
= 2.5E5 kN/m4
(e) Forca de contacto.
Figura 4.15: Efeito da parcela nao linear da rigidez da fundacao para v= 100 m/s, kl= 250 kN/m2,p= 10 rad/s e ζ= 0%.
50

0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ w
knl
= 2.5E3 kN/m4
knl
= 2.5E4 kN/m4
knl
= 2.5E5 kN/m4
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ M
knl
= 2.5E3 kN/m4
knl
= 2.5E4 kN/m4
knl
= 2.5E5 kN/m4
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.2 0.4 0.6 0.8 1−0.5
0
0.5
t/τ
y (m
/s)
knl
= 2.5E3 kN/m4
knl
= 2.5E4 kN/m4
knl
= 2.5E5 kN/m4
(c) Deslocamento do oscilador.
0 0.2 0.4 0.6 0.8 1−10
−5
0
5
10
15
20
t/τ
a (m
/s2 )
knl
= 2.5E3 kN/m4
knl
= 2.5E4 kN/m4
knl
= 2.5E5 kN/m4
(d) Aceleracao do oscilador.
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
100
t/τ
r (k
N)
knl
= 2.5E3 kN/m4
knl
= 2.5E4 kN/m4
knl
= 2.5E5 kN/m4
(e) Forca de contacto.
Figura 4.16: Efeito da parcela nao linear da rigidez da fundacao para v= 100 m/s, kl= 250 kN/m2,p= 25 rad/s e ζ= 0%.
0 0.2 0.4 0.6 0.8 1
−4
−2
0
2
4
6
t/τ
φ w
knl
= 2.5E3 kN/m4
knl
= 2.5E4 kN/m4
knl
= 2.5E5 kN/m4
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.2 0.4 0.6 0.8 1
−4
−2
0
2
4
6
t/τ
φ M
knl
= 2.5E3 kN/m4
knl
= 2.5E4 kN/m4
knl
= 2.5E5 kN/m4
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.2 0.4 0.6 0.8 1−0.5
0
0.5
t/τ
y (m
/s)
knl
= 2.5E3 kN/m4
knl
= 2.5E4 kN/m4
knl
= 2.5E5 kN/m4
(c) Deslocamento do oscilador.
0 0.2 0.4 0.6 0.8 1−10
−5
0
5
10
15
20
t/τ
a (m
/s2 )
knl
= 2.5E3 kN/m4
knl
= 2.5E4 kN/m4
knl
= 2.5E5 kN/m4
(d) Aceleracao do oscilador.
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
100
t/τ
r (k
N)
knl
= 2.5E3 kN/m4
knl
= 2.5E4 kN/m4
knl
= 2.5E5 kN/m4
(e) Forca de contacto.
Figura 4.17: Efeito da parcela nao linear da rigidez da fundacao para v= 200 m/s, kl= 250 kN/m2,p= 5 rad/s e ζ= 0%.
51

0 0.2 0.4 0.6 0.8 1
−4
−2
0
2
4
6
t/τ
φ w
knl
= 2.5E3 kN/m4
knl
= 2.5E4 kN/m4
knl
= 2.5E5 kN/m4
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.2 0.4 0.6 0.8 1
−4
−2
0
2
4
6
t/τ
φ M
knl
= 2.5E3 kN/m4
knl
= 2.5E4 kN/m4
knl
= 2.5E5 kN/m4
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.2 0.4 0.6 0.8 1−0.5
0
0.5
t/τ
y (m
/s)
knl
= 2.5E3 kN/m4
knl
= 2.5E4 kN/m4
knl
= 2.5E5 kN/m4
(c) Deslocamento do oscilador.
0 0.2 0.4 0.6 0.8 1−10
−5
0
5
10
15
20
t/τ
a (m
/s2 )
knl
= 2.5E3 kN/m4
knl
= 2.5E4 kN/m4
knl
= 2.5E5 kN/m4
(d) Aceleracao do oscilador.
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
100
t/τ
r (k
N)
knl
= 2.5E3 kN/m4
knl
= 2.5E4 kN/m4
knl
= 2.5E5 kN/m4
(e) Forca de contacto.
Figura 4.18: Efeito da parcela nao linear da rigidez da fundacao para v= 200 m/s, kl= 250 kN/m2,p= 10 rad/s e ζ= 0%.
0 0.2 0.4 0.6 0.8 1
−4
−2
0
2
4
6
t/τ
φ w
knl
= 2.5E3 kN/m4
knl
= 2.5E4 kN/m4
knl
= 2.5E5 kN/m4
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.2 0.4 0.6 0.8 1
−4
−2
0
2
4
6
t/τ
φ M
knl
= 2.5E3 kN/m4
knl
= 2.5E4 kN/m4
knl
= 2.5E5 kN/m4
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.2 0.4 0.6 0.8 1−0.5
0
0.5
t/τ
y (m
/s)
knl
= 2.5E3 kN/m4
knl
= 2.5E4 kN/m4
knl
= 2.5E5 kN/m4
(c) Deslocamento do oscilador.
0 0.2 0.4 0.6 0.8 1−10
−5
0
5
10
15
20
t/τ
a (m
/s2 )
knl
= 2.5E3 kN/m4
knl
= 2.5E4 kN/m4
knl
= 2.5E5 kN/m4
(d) Aceleracao do oscilador.
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
100
t/τ
r (k
N)
knl
= 2.5E3 kN/m4
knl
= 2.5E4 kN/m4
knl
= 2.5E5 kN/m4
(e) Forca de contacto.
Figura 4.19: Efeito da parcela nao linear da rigidez da fundacao para v= 200 m/s, kl= 250 kN/m2,p= 25 rad/s e ζ= 0%.
52

0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ w
knl
= 5E3 kN/m4
knl
= 5E4 kN/m4
knl
= 5E5 kN/m4
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ M
knl
= 5E3 kN/m4
knl
= 5E4 kN/m4
knl
= 5E5 kN/m4
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.2 0.4 0.6 0.8 1−0.5
0
0.5
t/τ
y (m
/s)
knl
= 5E3 kN/m4
knl
= 5E4 kN/m4
knl
= 5E5 kN/m4
(c) Deslocamento do oscilador.
0 0.2 0.4 0.6 0.8 1−10
−5
0
5
10
15
20
t/τ
a (m
/s2 )
knl
= 5E3 kN/m4
knl
= 5E4 kN/m4
knl
= 5E5 kN/m4
(d) Aceleracao do oscilador.
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
100
t/τ
r (k
N)
knl
= 5E3 kN/m4
knl
= 5E4 kN/m4
knl
= 5E5 kN/m4
(e) Forca de contacto.
Figura 4.20: Efeito da parcela nao linear da rigidez da fundacao para v= 100 m/s, kl= 500 kN/m2,p= 5 rad/s e ζ= 0%.
0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ w
knl
= 5E3 kN/m4
knl
= 5E4 kN/m4
knl
= 5E5 kN/m4
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ M
knl
= 5E3 kN/m4
knl
= 5E4 kN/m4
knl
= 5E5 kN/m4
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.2 0.4 0.6 0.8 1−0.5
0
0.5
t/τ
y (m
/s)
knl
= 5E3 kN/m4
knl
= 5E4 kN/m4
knl
= 5E5 kN/m4
(c) Deslocamento do oscilador.
0 0.2 0.4 0.6 0.8 1−10
−5
0
5
10
15
20
t/τ
a (m
/s2 )
knl
= 5E3 kN/m4
knl
= 5E4 kN/m4
knl
= 5E5 kN/m4
(d) Aceleracao do oscilador.
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
100
t/τ
r (k
N)
knl
= 5E3 kN/m4
knl
= 5E4 kN/m4
knl
= 5E5 kN/m4
(e) Forca de contacto.
Figura 4.21: Efeito da parcela nao linear da rigidez da fundacao para v= 100 m/s, kl= 500 kN/m2,p= 10 rad/s e ζ= 0%.
53

0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ w
knl
= 5E3 kN/m4
knl
= 5E4 kN/m4
knl
= 5E5 kN/m4
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ M
knl
= 5E3 kN/m4
knl
= 5E4 kN/m4
knl
= 5E5 kN/m4
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.2 0.4 0.6 0.8 1−0.5
0
0.5
t/τ
y (m
/s)
knl
= 5E3 kN/m4
knl
= 5E4 kN/m4
knl
= 5E5 kN/m4
(c) Deslocamento do oscilador.
0 0.2 0.4 0.6 0.8 1−10
−5
0
5
10
15
20
t/τ
a (m
/s2 )
knl
= 5E3 kN/m4
knl
= 5E4 kN/m4
knl
= 5E5 kN/m4
(d) Aceleracao do oscilador.
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
100
t/τ
r (k
N)
knl
= 5E3 kN/m4
knl
= 5E4 kN/m4
knl
= 5E5 kN/m4
(e) Forca de contacto.
Figura 4.22: Efeito da parcela nao linear da rigidez da fundacao para v= 100 m/s, kl= 500 kN/m2,p= 25 rad/s e ζ= 0%.
0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ w
knl
= 5E3 kN/m4
knl
= 5E4 kN/m4
knl
= 5E5 kN/m4
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ M
knl
= 5E3 kN/m4
knl
= 5E4 kN/m4
knl
= 5E5 kN/m4
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.2 0.4 0.6 0.8 1−0.5
0
0.5
t/τ
y (m
/s)
knl
= 5E3 kN/m4
knl
= 5E4 kN/m4
knl
= 5E5 kN/m4
(c) Deslocamento do oscilador.
0 0.2 0.4 0.6 0.8 1−10
−5
0
5
10
15
20
t/τ
a (m
/s2 )
knl
= 5E3 kN/m4
knl
= 5E4 kN/m4
knl
= 5E5 kN/m4
(d) Aceleracao do oscilador.
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
100
t/τ
r (k
N)
knl
= 5E3 kN/m4
knl
= 5E4 kN/m4
knl
= 5E5 kN/m4
(e) Forca de contacto.
Figura 4.23: Efeito da parcela nao linear da rigidez da fundacao para v= 200 m/s, kl= 500 kN/m2,p= 5 rad/s e ζ= 0%.
54

0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ w
knl
= 5E3 kN/m4
knl
= 5E4 kN/m4
knl
= 5E5 kN/m4
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ M
knl
= 5E3 kN/m4
knl
= 5E4 kN/m4
knl
= 5E5 kN/m4
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.2 0.4 0.6 0.8 1−0.5
0
0.5
t/τ
y (m
/s)
knl
= 5E3 kN/m4
knl
= 5E4 kN/m4
knl
= 5E5 kN/m4
(c) Deslocamento do oscilador.
0 0.2 0.4 0.6 0.8 1−10
−5
0
5
10
15
20
t/τ
a (m
/s2 )
knl
= 5E3 kN/m4
knl
= 5E4 kN/m4
knl
= 5E5 kN/m4
(d) Aceleracao do oscilador.
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
100
t/τ
r (k
N)
knl
= 5E3 kN/m4
knl
= 5E4 kN/m4
knl
= 5E5 kN/m4
(e) Forca de contacto.
Figura 4.24: Efeito da parcela nao linear da rigidez da fundacao para v= 200 m/s, kl= 500 kN/m2,p= 10 rad/s e ζ= 0%.
0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ w
knl
= 5E3 kN/m4
knl
= 5E4 kN/m4
knl
= 5E5 kN/m4
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.2 0.4 0.6 0.8 1−1
−0.5
0
0.5
1
1.5
2
t/τ
φ M
knl
= 5E3 kN/m4
knl
= 5E4 kN/m4
knl
= 5E5 kN/m4
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.2 0.4 0.6 0.8 1−0.5
0
0.5
t/τ
y (m
/s)
knl
= 5E3 kN/m4
knl
= 5E4 kN/m4
knl
= 5E5 kN/m4
(c) Deslocamento do oscilador.
0 0.2 0.4 0.6 0.8 1−10
−5
0
5
10
15
20
t/τ
a (m
/s2 )
knl
= 5E3 kN/m4
knl
= 5E4 kN/m4
knl
= 5E5 kN/m4
(d) Aceleracao do oscilador.
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
100
t/τ
r (k
N)
knl
= 5E3 kN/m4
knl
= 5E4 kN/m4
knl
= 5E5 kN/m4
(e) Forca de contacto.
Figura 4.25: Efeito da parcela nao linear da rigidez da fundacao para v= 200 m/s, kl= 500 kN/m2,p= 25 rad/s e ζ= 0%.
55

56

Capıtulo 5
Fundacao Bilinear
A ideia de uma fundacao com comportamento bilinear resulta naturalmente da intuicao que todos temos
que e mais difıcil obrigar um objeto pesado aumentar o seu grau de penetracao no solo que a reduzi-lo.
As fundacoes nao reagem igualmente a carregamentos descendentes e ascendentes, sendo este o
motivo deste capıtulo. Alguns autores ja abordaram o comportamento de vigas em fundacoes do tipo
bilinear ou o caso limite de uma fundacao nao resistente a tracao. Os trabalhos (Tsai e Westmann,
1967), (Farshad e Shahinpoor, 1972) ou (Johnson e Kouskoulas, 1973) para comportamento elastico
ou (Choros e Adams, 1979) para o comportamento dinamico sob a acao de uma forca concentrada
estao entre os estudos pioneiros nesse esforco de investigacao.
5.1 Teoria e formulacao do problema
Admitindo um comportamento da fundacao diferente consoante o movimento da viga seja descendente
ou ascendente, existem seis situacoes qualitativamente diferentes para o contacto entre um elemento
finito de viga e o solo de fundacao, representadas na Figura 5.1:
a. movimentos ascendente do lado esquerdo e descendente do lado direito,
b. movimentos ascendente do lado direito e descendente do lado esquerdo,
c. movimentos ascendentes laterais e descendente central,
d. movimentos ascendente central e descendentes laterais,
e. movimento ascendente em todo o vao,
f. movimento descendente em todo o vao.
Nos diagramas da Figura 5.1 indicam-se os coeficientes de rigidez de Winkler em cada troco de acordo
com a lei constitutiva bilinear representada na Figura 5.2. As linhas horizontais dos diagramas da Figura
5.1 representam o nıvel de referencia para o qual nao ha reacao sobra a viga por parte da fundacao
(origem do referencial no grafico da Figura 5.2). A quantidade kl+ corresponde a rigidez a tracao da
57

(a) Levantamento do lado esquerdo. (b) Levantamento do lado direito.
(c) Levantamento dos dois lados. (d) Levantamento do meio.
(e) Levantamento total. (f) Sem levantamento.
Figura 5.1: Diferentes situacoes de contacto consideradas entre a viga e a fundacao bilinear.
fundacao (para movimentos ascendentes) e kl− corresponde a rigidez a compressao (para movimentos
descendentes). Em bom rigor ha um setimo e um oitavo tipos de configuracao do elemento de viga em
relacao a fundacao correspondentes a tres intersecoes do eixo do elemento de viga com a linha de
referencia mas admitimos que esses dois casos nao ocorrem devido a um refinamento suficiente da
malha de elementos finitos (facto verificado com experiencias numericas).
Figura 5.2: Representacao da relacao constitutiva bilinear de uma fundacao.
5.1.1 Movimentos ascendente do lado esquerdo e descendente do lado direito
Considere-se que um elemento de viga de comprimento l sobe num troco de comprimento s do lado
esquerdo do elemento e desce no restante troco de comprimento l − s, como esta representado na
Figura 5.3. A seccao transversal de abcissa s da viga define a transicao entre a parte que sobe e a
58

que desce (sendo s calculavel como a raız da funcao do deslocamento). Pode-se definir a abcissa
dessa seccao em funcao do vetor das coordenadas generalizada: s = s(d). Assim, a energia potencial
elastica da fundacao tem a expressao
Uf =1
2
∫ s(de)
0
w(x)Tkl+w(x)dx+1
2
∫ l
s(de)
w(x)Tkl−w(x)dx
=1
2kl+d
eT
∫ s(de)
0
NeT(x)Ne(x)dxde
+1
2kl−d
eT
∫ l
s(de)
NeT(x)Ne(x)dxde. (5.1)
Note-se que os limites do integral dependem da abcissa s. O vetor das forcas internas da fundacao pe e
a matriz de rigidez tangente da fundacao Kef sao a primeira e a segunda derivada da energia potencial
da fundacao, respetivamente, e podem ser consultados na Seccao 4.1.1 de (Jorge, 2013).
Figura 5.3: Elemento a levantar do lado esquerdo.
5.1.2 Movimentos ascendente do lado direito e descendente do lado esquerdo
Tomemos agora um elemento de viga de comprimento l que sobe num troco de comprimento s do lado
direito do elemento e desce no restante troco de comprimento l− s, como esta representado na Figura
5.4. A expressao da energia potencial elastica da fundacao e
Uf =1
2
∫ l−s(de)
0
w(x)Tkl−w(x)dx+1
2
∫ l
l−s(de)
w(x)Tkl+w(x)dx
=1
2kl−d
eT
∫ l−s(de)
0
NeT(x)Ne(x)dxde
+1
2kl+d
eT
∫ l
l−s(de)
NeT(x)Ne(x)dxde. (5.2)
O vetor das forcas internas da fundacao pe e a matriz de rigidez tangente da fundacao Kef podem ser
consultados na Seccao 4.1.2 de (Jorge, 2013).
5.1.3 Movimentos ascendentes laterais e descendente central
A Figura 5.5 representa um elemento de viga de comprimento l em que as extremidades do elemento
levantam originando duas seccoes de transicao e portanto duas raızes, s1 e s2. A energia potencial
59

Figura 5.4: Elemento a levantar do lado direito.
elastica da fundacao tem uma expressao um pouco mais complicada que as anteriores,
Uf =1
2
∫ s1(de)
0
w(x)Tkl+w(x)dx+1
2
∫ l−s2(de)
s1(de)
w(x)Tkl−w(x)dx+1
2
∫ l
l−s2(de)
w(x)Tkl+w(x)dx
=1
2kl+d
eT
∫ s1(de)
0
NeT(x)Ne(x)dxde
+1
2kl−d
eT
∫ l−s2(de)
s1(de)
NeT(x)Ne(x)dxde
+1
2kl+d
eT
∫ l
l−s2(de)
NeT(x)Ne(x)dxde. (5.3)
O vetor das forcas internas da fundacao pe e a matriz de rigidez tangente da fundacao Kef encontram-se
definidos na Seccao 4.1.3 de (Jorge, 2013).
Figura 5.5: Elemento a levantar dos dois lados.
5.1.4 Movimentos ascendente central e descendente laterais
Considere-se que um elemento de viga de comprimento l em que ocorre o levantamento do meio,
originando duas raızes s1 e s2, como esta representado na Figura 5.6. A energia potencial elastica da
60

fundacao e
Uf =1
2
∫ s1(de)
0
w(x)Tkl−w(x)dx+1
2
∫ l−s2(de)
s1(de)
w(x)Tkl+w(x)dx
+1
2
∫ l
l−s2(de)
w(x)Tkl−w(x)dx
=1
2kl−d
eT
∫ s1(de)
0
NeT(x)Ne(x)dxde
+1
2kl+d
eT
∫ l−s2(de)
s1(de)
NeT(x)Ne(x)dxde
+1
2kl−d
eT
∫ l
l−s2(de)
NeT(x)Ne(x)dxde. (5.4)
O vetor das forcas internas da fundacao pe e a matriz de rigidez tangente da fundacao Kef podem ser
consultados na Seccao 4.1.4 de (Jorge, 2013).
Figura 5.6: Elemento a levantar no meio.
5.1.5 Movimento ascendente em todo o vao
O caso em que existe levantamento total do elemento de viga, representado na Figura 5.7 resume-se
ao caso linear ja apresentado no Capıtulo 3 em que a variavel kl e substituıda por kl+. A matriz de
rigidez tangente elementar da fundacao e calculada utilizando a equacao (3.7) e o vetor das forcas
internas da fundacao e dado por Kefd
e.
Figura 5.7: Elemento a levantar totalmente.
5.1.6 Movimento descendente em todo o vao
Na Figura 5.8 representa-se o caso em que existe um deslocamento descendente e todo o comprimento
do elemento finito. Tal como no caso anterior, a matriz de rigidez tangente da fundacao e dada pela
expressao (3.7) do Capıtulo 3, sendo kl = kl−. O vetor das forcas internas da fundacao e dado por
Kefd
e.
61

Figura 5.8: Elemento sem levantamento.
5.2 Resultados e comentarios
A presente seccao e dedicada ao estudo do comportamento dinamico de uma viga sobre um fundacao
elastica bilinear devido a passagem de um oscilador em movimento uniforme. Apresentam-se resul-
tados homologos aos Capıtulos 3 e 4; as condicoes de analise sao identicas as desses capıtulos,
usando-se os mesmos tres osciladores (p= 5 rad/s, p= 10 rad/s e p= 25 rad/s), o mesmo tipo de carril
(UIC60) e o mesmo comprimento de viga simplesmente apoiada (200 m). Mantem-se a malha de 400
elementos finitos e um avanco do oscilador de correspondente a 20% do comprimento do elemento
finito em cada passo de tempo correspondente. Porem, considerou-se a existencia de uma carga dis-
tribuıda igual ao peso proprio por unidade de comprimento da viga. O peso proprio da viga promove o
contacto entre a viga e a fundacao, sendo especialmente importante no caso em que a fundacao nao
tem rigidez a tracao (kl+ = 0 kN/m2).
5.2.1 Identificacao da velocidade crıtica
Nesta seccao apresenta-se um estudo sobre a influencia da diminuicao progressiva da rigidez de tracao
da fundacao (i) nos deslocamentos maximos da viga, do deslocamento e aceleracao maxima do osci-
lador e da forca maxima no contacto oscilador-viga e (ii) no valor da velocidade crıtica do oscilador na
vizinhanca da qual os valores maximos sao mais elevados. As figuras que se incluiu na analise que se
segue estao indicadas na Tabela 5.1.
Tabela 5.1: Parametros da fundacao assumidos nas Figuras 3.1, 3.2 e 5.9 a 5.18.
Figura kl− (kN/m2) kl+ (kN/m2) kl (kN/m2) ζ
3.1 - - 250 0
5.9 250 250 - 0
5.10 250 150 - 0
5.11 250 75 - 0
5.12 250 25 - 0
5.13 250 0 - 0
3.2 - - 250 0.02
5.14 250 250 - 0.02
5.15 250 150 - 0.02
5.16 250 75 - 0.02
5.17 250 25 - 0.02
5.18 250 0 - 0.02
62

Incluıram-se as Figuras 3.1 e 3.2 do Capıtulo 3 uma vez que sao homologas as Figuras 5.9 e
5.14, so que enquanto as Figuras 3.1 e 3.2 foram construıdas com base num modelo de fundacao
linear (com uma unica rigidez kl), as Figuras 5.9 e 5.14 foram construıdas com base num modelo
bilinear (assumindo duas rigidezes iguais, uma para movimentos ascendentes e outra para movimentos
descendentes). Comparando as Figuras 3.1 e 3.2 respetivamente com as Figuras 5.9 e 5.14, nota-se
que existem algumas pequenas diferencas, porem estas diferencas advem sobretudo da consideracao
do peso proprio por unidade de comprimento da viga no caso bilinear (Figuras 5.9 e 5.14). Analisando
as Figuras 5.9 a 5.13 observamos o efeito que a diminuicao progressiva da rigidez a tracao da fundacao
tem no aumento dos valores maximos de deslocamentos, aceleracao e forca de contacto. Verifica-
se tambem uma diminuicao da velocidade crıtica com o valor de kl+, culminando na situacao limite
(kl+ = 0 kN/m2, Figura 5.13) em que a velocidade crıtica e muito proxima de 100 m/s, ou seja,
apenas 360 km/h. Tal como nos casos linear e nao linear, verificamos a existencia de instabilidade
dinamica para uma certa gama de velocidades sempre superiores a velocidade crıtica. Verifica-se
igualmente que os deslocamentos maximos durante o segundo pico e a gama de velocidades para a
qual ocorre a instabilidade dinamica aumentam com a diminuicao da rigidez a tracao da fundacao e
que, para o oscilador com menor frequencia angular natural (p = 5 rad/s), a instabilidade dinamica so
se torna importante para valores mais reduzidos de kl+. Tal como foi observado nos casos linear e
nao linear, tambem no caso bilinear so ocorrem deslocamentos positivos do oscilador para velocidades
supercrıticas. Para o oscilador com frequencia mais elevada verificam-se aceleracoes maximas e forcas
de contacto maximas altas mesmo para velocidades subcrıticas afastada da velocidade crıtica. Para
uma rigidez a tracao da fundacao nula (kl+ = 0 kN/m2), os deslocamentos maximos da viga tomam
valores muito elevados, logo a seguir a velocidade crıtica, os quais ultrapassam o domınio de validade
da hipotese dos pequenos deslocamentos. Nas Figuras 5.14 a 5.18 verifica-se o efeito atenuador do
amortecimento viscoso nos deslocamentos maximos da viga e do oscilador, na aceleracao do oscilador
e na forca de contacto entre a viga e o oscilador. A Tabela 5.2 apresenta os deslocamentos maximos
positivo e negativo com e sem amortecimento para os tres diferentes osciladores e as velocidades
crıticas a que tais extremos ocorrem.
63

Tabela 5.2: Picos dos deslocamentos maximos para fundacao bilinear uniforme com kl− = 250 kN/m2.As propriedades do carril estao na Tabela 3.1.
p (rad/s) kl+ (kN/m2)ζ = 0 ζ = 0.02
v (m/s) wmax (m) v (m/s) wmax (m)
5
250210 0.561 208 0.307
206 −0.528 206 −0.322
150197 0.641 196 0.335
198 −0.506 192 −0.278
75174 0.758 177 0.363
172 −0.469 172 −0.246
25140 0.706 148 0.563
140 −0.374 147 −0.264
099 0.080 104 0.670
101 −0.679 105 −0.325
10
250210 0.564 208 0.296
211 −0.523 206 −0.294
150198 0.647 196 0.325
198 −0.503 191 −0.259
75176 0.759 177 0.367
172 −0.476 173 −0.248
25140 0.790 148 0.574
140 −0.388 147 −0.283
097 0.098 102 0.216
98 −0.947 104 0.362
25
250210 0.583 209 0.310
204 −0.576 204 −0.363
150198 0.672 196 0.345
197 −0.514 192 −0.306
75174 0.780 176 0.385
172 −0.481 173 −0.245
25139 0.751 149 0.539
139 −0.384 152 −0.248
092 0.320 100 0.850
92 −0.138 102 −0.409
64

50 100 150 200 250 300−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
v (m/s)
wm
ax (
m)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(a) Deslocamento maximo na viga em funcao davelocidade do oscilador.
50 100 150 200 250 300−0.5
0
0.5
v (m/s)
y max
(m
)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(b) Deslocamento maximo do oscilador em funcaoda velocidade do oscilador.
50 100 150 200 250 300−1500
−1000
−500
0
500
1000
1500
v (m/s)
a max
(m
/s2 )
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(c) Aceleracao maxima do oscilador em funcao davelocidade do oscilador.
50 100 150 200 250 300−1
−0.5
0
0.5
1x 10
4
v (m/s)
r (k
N)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(d) Forca maxima de contacto em funcao da velo-cidade do oscilador.
Figura 5.9: Fundacao uniforme com kl+ = 250 kN/m2, kl− = 250 kN/m2, sem amortecimento.
50 100 150 200 250 300−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
v (m/s)
wm
ax (
m)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(a) Deslocamento maximo na viga em funcao davelocidade do oscilador.
50 100 150 200 250 300−0.5
0
0.5
v (m/s)
y max
(m
)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(b) Deslocamento maximo do oscilador em funcaoda velocidade do oscilador.
50 100 150 200 250 300−1500
−1000
−500
0
500
1000
1500
v (m/s)
a max
(m
/s2 )
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(c) Aceleracao maxima do oscilador em funcao davelocidade do oscilador.
50 100 150 200 250 300−1
−0.5
0
0.5
1x 10
4
v (m/s)
r (k
N)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(d) Forca maxima de contacto em funcao da velo-cidade do oscilador.
Figura 5.10: Fundacao uniforme com kl+ = 150 kN/m2, kl− = 250 kN/m2, sem amortecimento.
65

50 100 150 200 250 300−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
v (m/s)
wm
ax (
m)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(a) Deslocamento maximo na viga em funcao davelocidade do oscilador.
50 100 150 200 250 300−0.5
0
0.5
v (m/s)
y max
(m
)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(b) Deslocamento maximo do oscilador em funcaoda velocidade do oscilador.
50 100 150 200 250 300−1500
−1000
−500
0
500
1000
1500
v (m/s)
a max
(m
/s2 )
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(c) Aceleracao maxima do oscilador em funcao davelocidade do oscilador.
50 100 150 200 250 300−1
−0.5
0
0.5
1x 10
4
v (m/s)
r (k
N)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(d) Forca maxima de contacto em funcao da velo-cidade do oscilador.
Figura 5.11: Fundacao uniforme com kl+ = 75 kN/m2, kl− = 250 kN/m2, sem amortecimento.
50 100 150 200 250 300−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
v (m/s)
wm
ax (
m)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(a) Deslocamento maximo na viga em funcao davelocidade do oscilador.
50 100 150 200 250 300−0.5
0
0.5
v (m/s)
y max
(m
)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(b) Deslocamento maximo do oscilador em funcaoda velocidade do oscilador.
50 100 150 200 250 300−1500
−1000
−500
0
500
1000
1500
v (m/s)
a max
(m
/s2 )
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(c) Aceleracao maxima do oscilador em funcao davelocidade do oscilador.
50 100 150 200 250 300−1
−0.5
0
0.5
1x 10
4
v (m/s)
r (k
N)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(d) Forca maxima de contacto em funcao da velo-cidade do oscilador.
Figura 5.12: Fundacao uniforme com kl+ = 25 kN/m2, kl− = 250 kN/m2, sem amortecimento.
66

50 100 150 200 250 300−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
v (m/s)
wm
ax (
m)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(a) Deslocamento maximo na viga em funcao davelocidade do oscilador.
50 100 150 200 250 300−0.5
0
0.5
v (m/s)
y max
(m
)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(b) Deslocamento maximo do oscilador em funcaoda velocidade do oscilador.
50 100 150 200 250 300−1500
−1000
−500
0
500
1000
1500
v (m/s)
a max
(m
/s2 )
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(c) Aceleracao maxima do oscilador em funcao davelocidade do oscilador.
50 100 150 200 250 300−1
−0.5
0
0.5
1x 10
4
v (m/s)
r (k
N)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(d) Forca maxima de contacto em funcao da velo-cidade do oscilador.
Figura 5.13: Fundacao uniforme com kl+ = 0 kN/m2, kl− = 250 kN/m2, sem amortecimento.
50 100 150 200 250 300−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
v (m/s)
wm
ax (
m)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(a) Deslocamento maximo na viga em funcao davelocidade do oscilador.
50 100 150 200 250 300−0.5
0
0.5
v (m/s)
y max
(m
)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(b) Deslocamento maximo do oscilador em funcaoda velocidade do oscilador.
50 100 150 200 250 300−1500
−1000
−500
0
500
1000
1500
v (m/s)
a max
(m
/s2 )
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(c) Aceleracao maxima do oscilador em funcao davelocidade do oscilador.
50 100 150 200 250 300−1
−0.5
0
0.5
1x 10
4
v (m/s)
r (k
N)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(d) Forca maxima de contacto em funcao da velo-cidade do oscilador.
Figura 5.14: Fundacao uniforme com kl+ = 250 kN/m2, kl− = 250 kN/m2, com amortecimento ζ =2%.
67

50 100 150 200 250 300−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
v (m/s)
wm
ax (
m)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(a) Deslocamento maximo na viga em funcao davelocidade do oscilador.
50 100 150 200 250 300−0.5
0
0.5
v (m/s)
y max
(m
)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(b) Deslocamento maximo do oscilador em funcaoda velocidade do oscilador.
50 100 150 200 250 300−1500
−1000
−500
0
500
1000
1500
v (m/s)
a max
(m
/s2 )
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(c) Aceleracao maxima do oscilador em funcao davelocidade do oscilador.
50 100 150 200 250 300−1
−0.5
0
0.5
1x 10
4
v (m/s)
r (k
N)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(d) Forca maxima de contacto em funcao da velo-cidade do oscilador.
Figura 5.15: Fundacao uniforme com kl+ = 150 kN/m2, kl− = 250 kN/m2, com amortecimento ζ =2%.
50 100 150 200 250 300−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
v (m/s)
wm
ax (
m)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(a) Deslocamento maximo na viga em funcao davelocidade do oscilador.
50 100 150 200 250 300−0.5
0
0.5
v (m/s)
y max
(m
)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(b) Deslocamento maximo do oscilador em funcaoda velocidade do oscilador.
50 100 150 200 250 300−1500
−1000
−500
0
500
1000
1500
v (m/s)
a max
(m
/s2 )
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(c) Aceleracao maxima do oscilador em funcao davelocidade do oscilador.
50 100 150 200 250 300−1
−0.5
0
0.5
1x 10
4
v (m/s)
r (k
N)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(d) Forca maxima de contacto em funcao da velo-cidade do oscilador.
Figura 5.16: Fundacao uniforme com kl+ = 75 kN/m2, kl− = 250 kN/m2, com amortecimento ζ =2%.
68

50 100 150 200 250 300−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
v (m/s)
wm
ax (
m)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(a) Deslocamento maximo na viga em funcao davelocidade do oscilador.
50 100 150 200 250 300−0.5
0
0.5
v (m/s)
y max
(m
)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(b) Deslocamento maximo do oscilador em funcaoda velocidade do oscilador.
50 100 150 200 250 300−1500
−1000
−500
0
500
1000
1500
v (m/s)
a max
(m
/s2 )
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(c) Aceleracao maxima do oscilador em funcao davelocidade do oscilador.
50 100 150 200 250 300−1
−0.5
0
0.5
1x 10
4
v (m/s)
r (k
N)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(d) Forca maxima de contacto em funcao da velo-cidade do oscilador.
Figura 5.17: Fundacao uniforme com kl+ = 25 kN/m2, kl− = 250 kN/m2, com amortecimento ζ =2%.
50 100 150 200 250 300−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
v (m/s)
wm
ax (
m)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(a) Deslocamento maximo na viga em funcao davelocidade do oscilador.
50 100 150 200 250 300−0.5
0
0.5
v (m/s)
y max
(m
)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(b) Deslocamento maximo do oscilador em funcaoda velocidade do oscilador.
50 100 150 200 250 300−1500
−1000
−500
0
500
1000
1500
v (m/s)
a max
(m
/s2 )
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(c) Aceleracao maxima do oscilador em funcao davelocidade do oscilador.
50 100 150 200 250 300−1
−0.5
0
0.5
1x 10
4
v (m/s)
r (k
N)
p = 5 rad/sp = 10 rad/sp = 25 rad/s
(d) Forca maxima de contacto em funcao da velo-cidade do oscilador.
Figura 5.18: Fundacao uniforme com kl+ = 0 kN/m2, kl− = 250 kN/m2, com amortecimento ζ = 2%.
69

5.2.2 Estudos Parametricos
Tal como nos capıtulos anteriores, os estudos parametricos sao baseados num conjunto de figuras,
cada uma contendo cinco graficos representando quantidades instantaneas (as mesmas do Capıtulo 3
e 4) em funcao da percentagem de tempo decorrida desde a entrada do oscilador na viga. A Tabela 5.3
sistematiza esse conjunto de figuras, tendo-se assumido amortecimento da fundacao e massa inferior
do oscilador nulos (ζ = m2 = 0) em todos os casos. As amplificacoes dinamicas dos graficos (a) e (b)
sao calculadas em relacao ao caso estatico da fundacao linear tal como no Capıtulo 3 (3.18).
Tabela 5.3: Valores numericos dos parametros assumidos nas Figuras 5.19 a 5.24.
Figura kl− (kN/m2) v (m/s) p (rad/s)
5.19 250 150 5
5.20 250 150 10
5.21 250 150 25
5.22 250 200 5
5.23 250 200 10
5.24 250 200 25
No primeiro conjunto de Figuras 5.19 a 5.21 observamos que uma menor rigidez de tracao da
fundacao corresponde a valores mais elevados de coeficientes de amplificacao dinamica de desloca-
mento e momento fletor. Observa-se tambem que uma maior rigidez/frequencia natural do oscilador
movel conduz a graficos de deslocamento (c) e aceleracao (d) do oscilador e da forca de contacto (e)
com mais oscilacoes e a maiores amplitudes da aceleracao do oscilador e da forca de contacto. Em
cada um dos graficos (d) e (e) nota-se tambem que uma maior rigidez da fundacao para movimentos
ascendentes tem um efeito moderador das oscilacoes da aceleracao do oscilador e da forca de contacto
que se observam quando o oscilador atinge a regiao vizinha do apoio da direita. Como ja foi referido
anteriormente, cremos que um outro tipo de apoio que corresponda a uma flexibilizacao da condicao
de apoio fixo na direcao vertical (por exemplo encastramento deslizante na direcao vertical ou extremi-
dade livre) reduziria as oscilacoes referidas. Quando se considera uma velocidade do oscilador perto
da velocidade crıtica do caso da fundacao linear (Figuras 5.22, 5.23 e 5.24) observamos que os fatores
de amplificacao e o deslocamento da massa superior do oscilador e da forca de contacto se agravam,
em especial quando a frequencia natural do oscilador e mais elevada e a rigidez de tracao da fundacao
(kl+) e mais baixa.
70

0 0.2 0.4 0.6 0.8 1−6
−4
−2
0
2
4
6
8
t/τ
φ w
kl+
= 250 kN/m2
kl+
= 150 kN/m2
kl+
= 75 kN/m2
kl+
= 25 kN/m2
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.2 0.4 0.6 0.8 1−6
−4
−2
0
2
4
6
8
t/τ
φ M
kl+
= 250 kN/m2
kl+
= 150 kN/m2
kl+
= 75 kN/m2
kl+
= 25 kN/m2
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.2 0.4 0.6 0.8 1−0.5
0
0.5
t/τ
y (m
)
kl+
= 250 kN/m2
kl+
= 150 kN/m2
kl+
= 75 kN/m2
kl+
= 25 kN/m2
(c) Deslocamento do oscilador.
0 0.2 0.4 0.6 0.8 1−10
−5
0
5
10
15
20
t/τ
a (m
/s2 )
kl+
= 250 kN/m2
kl+
= 150 kN/m2
kl+
= 75 kN/m2
kl+
= 25 kN/m2
(d) Aceleracao do oscilador.
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
100
150
t/τ
r (k
N)
kl+
= 250 kN/m2
kl+
= 150 kN/m2
kl+
= 75 kN/m2
kl+
= 25 kN/m2
(e) Forca de contacto.
Figura 5.19: Efeito da variacao da rigidez de tracao da fundacao kl+ para v = 150 m/s,kl− = 250 kN/m2, p = 5 rad/s, e ζ = 0%.
0 0.2 0.4 0.6 0.8 1−6
−4
−2
0
2
4
6
8
t/τ
r (k
N)
kl+
= 250 kN/m2
kl+
= 150 kN/m2
kl+
= 75 kN/m2
kl+
= 25 kN/m2
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.2 0.4 0.6 0.8 1−6
−4
−2
0
2
4
6
8
t/τ
r (k
N)
kl+
= 250 kN/m2
kl+
= 150 kN/m2
kl+
= 75 kN/m2
kl+
= 25 kN/m2
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.2 0.4 0.6 0.8 1−0.5
0
0.5
t/τ
r (k
N)
kl+
= 250 kN/m2
kl+
= 150 kN/m2
kl+
= 75 kN/m2
kl+
= 25 kN/m2
(c) Deslocamento do oscilador.
0 0.2 0.4 0.6 0.8 1−10
−5
0
5
10
15
20
t/τ
r (k
N)
kl+
= 250 kN/m2
kl+
= 150 kN/m2
kl+
= 75 kN/m2
kl+
= 25 kN/m2
(d) Aceleracao do oscilador.
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
100
150
t/τ
r (k
N)
kl+
= 250 kN/m2
kl+
= 150 kN/m2
kl+
= 75 kN/m2
kl+
= 25 kN/m2
(e) Forca de contacto.
Figura 5.20: Efeito da variacao da rigidez de tracao da fundacao kl+ para v = 150 m/s,kl− = 250 kN/m2, p = 10 rad/s, e ζ = 0%.
71

0 0.2 0.4 0.6 0.8 1−6
−4
−2
0
2
4
6
8
t/τ
r (k
N)
kl+
= 250 kN/m2
kl+
= 150 kN/m2
kl+
= 75 kN/m2
kl+
= 25 kN/m2
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.2 0.4 0.6 0.8 1−6
−4
−2
0
2
4
6
8
t/τ
r (k
N)
kl+
= 250 kN/m2
kl+
= 150 kN/m2
kl+
= 75 kN/m2
kl+
= 25 kN/m2
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.2 0.4 0.6 0.8 1−0.5
0
0.5
t/τ
r (k
N)
kl+
= 250 kN/m2
kl+
= 150 kN/m2
kl+
= 75 kN/m2
kl+
= 25 kN/m2
(c) Deslocamento do oscilador.
0 0.2 0.4 0.6 0.8 1−10
−5
0
5
10
15
20
t/τ
r (k
N)
kl+
= 250 kN/m2
kl+
= 150 kN/m2
kl+
= 75 kN/m2
kl+
= 25 kN/m2
(d) Aceleracao do oscilador.
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
100
150
t/τ
r (k
N)
kl+
= 250 kN/m2
kl+
= 150 kN/m2
kl+
= 75 kN/m2
kl+
= 25 kN/m2
(e) Forca de contacto.
Figura 5.21: Efeito da variacao da rigidez de tracao da fundacao kl+ para v = 150 m/s,kl− = 250 kN/m2, p = 25 rad/s, e ζ = 0%.
0 0.2 0.4 0.6 0.8 1−6
−4
−2
0
2
4
6
8
t/τ
φ w
kl+
= 250 kN/m2
kl+
= 150 kN/m2
kl+
= 75 kN/m2
kl+
= 25 kN/m2
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.2 0.4 0.6 0.8 1−6
−4
−2
0
2
4
6
8
t/τ
φ M
kl+
= 250 kN/m2
kl+
= 150 kN/m2
kl+
= 75 kN/m2
kl+
= 25 kN/m2
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.2 0.4 0.6 0.8 1−0.5
0
0.5
t/τ
y (m
)
kl+
= 250 kN/m2
kl+
= 150 kN/m2
kl+
= 75 kN/m2
kl+
= 25 kN/m2
(c) Deslocamento do oscilador.
0 0.2 0.4 0.6 0.8 1−10
0
10
20
30
40
t/τ
a (m
/s2 )
kl+
= 250 kN/m2
kl+
= 150 kN/m2
kl+
= 75 kN/m2
kl+
= 25 kN/m2
(d) Aceleracao do oscilador.
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
100
150
t/τ
r (k
N)
kl+
= 250 kN/m2
kl+
= 150 kN/m2
kl+
= 75 kN/m2
kl+
= 25 kN/m2
(e) Forca de contacto.
Figura 5.22: Efeito da variacao da rigidez de tracao da fundacao kl+ para v = 200 m/s,kl− = 2 50 kN/m2, p = 5 rad/s, e ζ = 0%.
72

0 0.2 0.4 0.6 0.8 1−6
−4
−2
0
2
4
6
8
t/τ
φ w
kl+
= 250 kN/m2
kl+
= 150 kN/m2
kl+
= 75 kN/m2
kl+
= 25 kN/m2
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.2 0.4 0.6 0.8 1−6
−4
−2
0
2
4
6
8
t/τ
φ M
kl+
= 250 kN/m2
kl+
= 150 kN/m2
kl+
= 75 kN/m2
kl+
= 25 kN/m2
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.2 0.4 0.6 0.8 1−0.5
0
0.5
t/τ
y (m
/s)
kl+
= 250 kN/m2
kl+
= 150 kN/m2
kl+
= 75 kN/m2
kl+
= 25 kN/m2
(c) Deslocamento do oscilador.
0 0.2 0.4 0.6 0.8 1−10
0
10
20
30
40
t/τ
a (m
/s2 )
kl+
= 250 kN/m2
kl+
= 150 kN/m2
kl+
= 75 kN/m2
kl+
= 25 kN/m2
(d) Aceleracao do oscilador.
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
100
150
t/τ
r (k
N)
kl+
= 250 kN/m2
kl+
= 150 kN/m2
kl+
= 75 kN/m2
kl+
= 25 kN/m2
(e) Forca de contacto.
Figura 5.23: Efeito da variacao da rigidez de tracao da fundacao kl+ para v = 200 m/s,kl− = 250 kN/m2, p = 10 rad/s, e ζ = 0%.
0 0.2 0.4 0.6 0.8 1−6
−4
−2
0
2
4
6
8
t/τ
φ w
kl+
= 250 kN/m2
kl+
= 150 kN/m2
kl+
= 75 kN/m2
kl+
= 25 kN/m2
(a) Amplificacao dinamica do desloca-mento a meio vao.
0 0.2 0.4 0.6 0.8 1−6
−4
−2
0
2
4
6
8
t/τ
φ M
kl+
= 250 kN/m2
kl+
= 150 kN/m2
kl+
= 75 kN/m2
kl+
= 25 kN/m2
(b) Amplificacao dinamica do mo-mento fletor a meio vao.
0 0.2 0.4 0.6 0.8 1−0.5
0
0.5
t/τ
y (m
/s)
kl+
= 250 kN/m2
kl+
= 150 kN/m2
kl+
= 75 kN/m2
kl+
= 25 kN/m2
(c) Deslocamento do oscilador.
0 0.2 0.4 0.6 0.8 1−10
0
10
20
30
40
t/τ
a (m
/s2 )
kl+
= 250 kN/m2
kl+
= 150 kN/m2
kl+
= 75 kN/m2
kl+
= 25 kN/m2
(d) Aceleracao do oscilador.
0 0.2 0.4 0.6 0.8 1−150
−100
−50
0
50
100
150
t/τ
r (k
N)
kl+
= 250 kN/m2
kl+
= 150 kN/m2
kl+
= 75 kN/m2
kl+
= 25 kN/m2
(e) Forca de contacto.
Figura 5.24: Efeito da variacao da rigidez de tracao da fundacao kl+ para v = 200 m/s,kl− = 250 kN/m2, p = 25 rad/s, e ζ = 0%.
73

74

Capıtulo 6
Conclusoes
Esta dissertacao teve como objetivo o estudo do comportamento dinamico de vigas finitas apoiadas
em fundacao elastica discretizadas pelo metodo dos elementos finitos, percorridas por um oscilador
harmonico simples em movimento uniforme. O foco do trabalho desenvolvido foi o tipo de lei constitutiva
da fundacao em tres vertentes: elastica linear (Capıtulo 3), elastica nao linear (Capıtulo 4) e elastica
bilinear (Capıtulo 5).
Para o caso de uma fundacao linear, as curvas de deslocamento maximo da viga para os tres dife-
rentes osciladores apresentam dois picos. O primeiro pico corresponde a ocorrencia de um fenomeno
de ressonancia entre a velocidade do oscilador e a mınima velocidade de fase de ondas na estrutura
(Metrikine e Verichev, 2001). Tal pico ocorre praticamente para os valores de velocidades crıticas ob-
tidos para o caso de uma carga movel ((Dimitrovova e Rodrigues, 2012) e (Jorge, 2013)). O segundo
pico corresponde a ocorrencia de uma instabilidade dinamica (por flutter) no sistema viga-fundacao-
oscilador. A gama de velocidades para a qual ocorre instabilidade dinamica aumenta com a frequencia
natural do oscilador. O aumento da rigidez da fundacao reduz os picos de deslocamentos e au-
menta tanto a velocidade crıtica como as velocidades para as quais ocorre instabilidade dinamica.
A consideracao de amortecimento viscoso na fundacao reduz os valores de pico dos deslocamentos
e o segundo pico desaparece para osciladores menos rıgidos. Para osciladores mais rıgidos ocorrem
sempre aceleracoes elevadas para velocidades mais baixas e afastadas da velocidade crıtica que po-
dem danificar a estrutura e causar desconforto aos passageiros. Para velocidades do oscilador perto
da velocidade crıtica, obtem-se forcas de contato entre a viga e a fundacao positivas que correspondem
a um cenario de descarrilamento.
Para o caso de uma fundacao com comportamento nao linear cubico, o aumento da rigidez nao
linear da fundacao reduz os deslocamentos maximos da viga e do oscilador, as aceleracoes maximas
do oscilador e a forca de contato entre a viga e a fundacao. Tambem aumenta a velocidade crıtica e
os valores das velocidades (sempre superiores a velocidade crıtica) para os quais ocorre instabilidade
dinamica. Quando se considera amortecimento viscoso na fundacao, os deslocamentos maximos da
viga e do oscilador, as aceleracoes maximas do oscilador e a forca de contato entre a viga e a fundacao
reduzem-se consideravelmente.
75

Para o caso de uma fundacao com comportamento bilinear, concluımos que a diminuicao da rigidez
a tracao da fundacao reduz a velocidade crıtica e o valor da velocidade mınima para ocorrencia de insta-
bilidade dinamica. Verifica-se ainda que a diminuicao de kl+ faz aumentar a gama de velocidades para
a qual ocorre instabilidade dinamica. Tambem verificamos um aumento dos valores de deslocamentos
da viga e do oscilador, aceleracao do oscilador e forca de contato entre a viga e o oscilador. Para uma
rigidez a tracao da fundacao nula (kl+ = 0 kN/m2), os deslocamentos maximos da viga tomam valores
muito elevados, os quais ultrapassam claramente o domınio de validade da hipotese dos pequenos
deslocamentos. Tambem no caso bilinear, como seria de esperar, a consideracao de amortecimento
viscoso na fundacao reduz consideravelmente os deslocamentos da viga e do oscilador, as aceleracoes
do oscilador e a forca de contato entre a viga e a fundacao.
Um dos topicos que merece atencao num eventual desenvolvimento deste trabalho e a consideracao
de outras condicoes fronteira para alem das de apoio simples com o objetivo de aferir se as variacoes
subitas da aceleracao da massa superior do oscilador e da reacao de ligacao entre o oscilador e a viga,
que ocorrem quando o oscilador esta muito perto do apoio de saıda, desaparecem ou sao atenuadas.
Um outro topico intimamente ligado com o atras referido e o da consideracao de elementos infinitos
nas extremidades ou condicoes de fronteira absorventes, o que permite modelar uma viga infinita por
um modelo de elementos finitos. Um terceiro aspeto merecedor de desenvolvimento e a obtencao da
configuracao em regime estacionario de uma viga infinita percorrida por uma forca concentrada ou um
oscilador em movimento uniforme sem ter que recorrer a integracoes numericas no tempo, sempre
dispendiosas computacionalmente. Um ultimo aspecto importante de referir para um desenvolvimento
futuro e a consideracao da massa inferior m2.
76

Bibliografia
Bitzenbauer, J. e Dinkel, J. Dynamic interaction between a moving vehicle and an infinite structure
excited by irregularities - fourier transforms solution. Archive of Applied Mechanics, 72:66–73, 2002.
Chang, T.-P. e Liu, Y.-N. Dynamic finite element analysis of a nonlinear beam subjected to a moving
load. International Journal of Solids and Structures, 33:1673–1688, 1996.
Choros, J. e Adams, G. G. A steadily moving load on an elastic beam resting on a tensionless winkler
foundation. Journal of Applied Mechanics (ASME), 46:175–180, 1979.
Denisov, G., Kugusheva, E., e Novikov, V. On the problem of the stability of one dimensional unbounded
elastic systems. Journal of Applied Mathematics and Mechanics, 49:691–696, 1985.
Dimitrovova, Z. e Rodrigues, A. Critical velocity of a uniformly moving load. Advances in Engineering
Software, page 50:44–56, 2012.
Ding, H., Yang, Y., Chen, L.-Q., e Yang, S.-P. Vibration of vehicle–pavement coupled system based on a
timoshenko beam on a nonlinear foundation. Journal of Sound and Vibration, 333:6623–6636, 2014.
Duffy, D. The response of an infinite railroad track to a moving vibrating mass. Journal of Applied
Mechanics, 57:66–73, 1990.
Farshad, M. e Shahinpoor, M. Beams on bilinear elastic foundations. International Journal of Mechanical
Sciences, 14:441–445, 1972.
Fryba, L. Vibration of solids and structures under moving loads. Thomas Telford, 1999.
Hilber, H., Hughes, T., e Taylor, R. Improved numerical dissipation for time integration algorithms in
structural dynamics. Earthquake Engineering and Structural Dynamics, page 5:283–292, 1977.
Hino, J., Yoshimura, T., e Ananthanarayana, N. Vibration analysis of non-linear beams subjected to a
moving load using the finite element method. Journal of Sound and Vibration, 100:477–491, 1985.
Hutton, D. e Counts, J. Deflection of a beam carrying a moving mass. Journal of Engineering Mechanics,
Transactions of the ASME, 41:803–804, 1974.
Johnson, W. H. e Kouskoulas, V. Beam on bilinear foundation. Journal of Applied Mechanics (ASME),
pages 239–243, March 1973.
77

Jorge, P. Dynamic analysis of finite beams on elastic foundations under the action of moving loads. MSc
dissertation in Civil Engineering, Instituto Superior Tecnico, Lisboa, 2013. In Portuguese.
Katz, R., Lee, C., Vlsoy, A., e Scott, R. Dynamic stability and response of a beam subjected to a
deflection dependent moving load. Journal of Vibration, Acoustics, Stress, and Reliability in Design
ASME, 109:361–365, 1987.
Lee, U. Revisiting the moving mass problem: onset of separation between the mass and beam. Journal
of vibration and acoustics, 118:516–521, 1996.
Lin, Y. H. e Trethewey, M. W. Finite element analysis of elastic beams subjected to moving dynamic
loads. Journal of Sound and Vibrations, 136:323–342, 1990.
Metrikine, A. e Dieterman, H. Instability of vibrations of a mass moving uniformly along an axially
compressed beam on a viscoelastic foundation. Journal of Sound and Vibration, 201:567–576, 1997.
Metrikine, A. e Verichev, S. Instability of vibrations of a moving two-mass oscillator on a flexibly supported
timoshenko beam. Archive of Applied Mechanics 71, pages 613–624, 2001.
Muscolino, G. e Palmeri, A. Response of beams resting on viscoelastically damped foundation to moving
oscillators. International Journal of Solids and Structures, 44:1317–1336, 2007.
Omenzetter, P. e Fujino, Y. Interaction of nonconservative 1d continuum and moving mdof oscillator.
Journal of Engineering Mechanics, 127:1082–1088, 2001.
Pesterev, A. e Bergman, L. Response of elastic continuum carrying moving linear oscillator. Journal of
engineering Mechanics ASCE, 123:878–884, 1997a.
Pesterev, A. e Bergman, L. Vibration of elastic continuum carrying accelerating oscillator. Journal of
engineering Mechanics ASCE, 123:886–889, 1997b.
Pesterev, A. e Bergman, L. Response of a nonconservative continuous system to a moving concentrated
load. Journal of engineering Mechanics ASCE, 65:436–444, 1998.
Sadiku, S. e Leipholz, H. On the dynamics of elastic systems with moving concentrated masses.
Ingenieur-Archiv, 57:223–242, 1987.
Stanisic, M. On a new theory of the dynamic behavior of the structures carrying moving masses.
Ingenieur-Archiv, page 176–185, 1985.
Tsai, N. C. e Westmann, R. A. Beam on tensionless foundation. Proceedings of the American Society
of Civil Engineers, 93 (EM5):1–12, October 1967.
Verichev, S. e Metrikine, A. Instability of a bogie moving on a flexibly supported timoshenko beam.
Journal of Sound and Vibration, 253:653–668, 2002.
Wolfert, A., Dieterman, H., e Metrikine, A. Stability of vibrations of two oscillators moving uniformly along
a beam on a viscoelastic foundation. Journal of Sound and Vibration, 211:718–731, 1998.
78

Yang, B., Tan, C., e Bergman, L. Direct numerical procedure for solution of moving oscillator problems.
Journal of Engineering Mechanics, 126:462–469, 2000.
Yoshimura, T., Hino, J., e Ananthanarayana, N. Vibration analysis of a non-linear beam subjected to
moving loads by using the galerkin method. Journal of Sound and Vibration, 104:179–186, 1986.
79

80

Lista de Tabelas
3.1 Propriedades do carril UIC60 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.2 Picos dos deslocamentos maximos para fundacao linear uniforme; As propriedades do
carril estao na Tabela 3.1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.3 Valores para os quais os graficos das Figuras 3.5 a 3.28 foram tracados. . . . . . . . . . 22
4.1 Parametros da fundacao assumidos nas Figuras 3.1 a 3.4 e 4.2 a 4.13. . . . . . . . . . . 40
4.2 Picos dos deslocamentos maximos para fundacao nao linear uniforme com
kl = 250 kN/m2; As propriedades do carril estao na Tabela 3.1 . . . . . . . . . . . . . . . 41
4.3 Picos dos deslocamentos maximos para fundacao nao linear uniforme com
kl = 500 kN/m2; As propriedades do carril estao na Tabela 3.1 . . . . . . . . . . . . . . . 42
4.4 Parametros assumidos nas Figuras 4.11 a 4.25. . . . . . . . . . . . . . . . . . . . . . . . 49
5.1 Parametros da fundacao assumidos nas Figuras 3.1, 3.2 e 5.9 a 5.18. . . . . . . . . . . . 62
5.2 Picos dos deslocamentos maximos para fundacao nao bilinear uniforme com
kl− = 250 kN/m2; As propriedades do carril estao na Tabela 3.1 . . . . . . . . . . . . . . 64
5.3 Valores numericos dos parametros assumidos nas Figuras 5.19 a 5.24. . . . . . . . . . . 70
81

82

Lista de Figuras
2.1 Viga discretizada pelo Metodo dos Elementos Finitos sujeita a acao de um oscilador movel. 5
2.2 Principio de d’Alembert aplicado a massa m1. . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.3 Principio de d’Alembert aplicado a massa m2 em contacto com a viga. . . . . . . . . . . . 6
2.4 Deslocamentos nodais de um elemento de viga uniforme do tipo Euler-Bernoulli. . . . . . 7
2.5 Forcas nodais elementares estaticamente equivalentes a acao de uma forca pontual. . . 8
2.6 Forcas nodais elementares estaticamente equivalentes a acao de uma forca distribuıda. . 8
2.7 Viga com extremidades livres apoiada em fundacao. . . . . . . . . . . . . . . . . . . . . . 10
2.8 Diferentes tipos de condicoes de fronteira. . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3.1 Resultados para uma fundacao uniforme com kl = 250 kN/m2, sem amortecimento. . . . 20
3.2 Resultados para uma fundacao uniforme com kl = 250 kN/m2, com amortecimento ζ= 2%. 20
3.3 Resultados para uma fundacao uniforme com kl = 500 kN/m2, sem amortecimento. . . . 21
3.4 Resultados para uma fundacao uniforme com kl = 500 kN/m2 com amortecimento ζ= 2%. 21
3.5 Efeito da rigidez da fundacao para v = 100 m/s, L = 200 m, p = 5 rad/s, ζ = 0% e m2 = 0. 25
3.6 Efeito da rigidez da fundacao para v = 100 m/s, L = 200 m, p = 10 rad/s, ζ = 0% e m2 = 0. 25
3.7 Efeito da rigidez da fundacao para v = 100 m/s, L = 200 m, p = 25 rad/s, ζ = 0% e m2 = 0. 26
3.8 Efeito da rigidez da fundacao para v = 200 m/s, L = 200 m, p = 5 rad/s, ζ = 0% e m2 = 0. 26
3.9 Efeito da rigidez da fundacao para v = 200 m/s, L = 200 m, p = 10 rad/s, ζ = 0% e m2 = 0. 27
3.10 Efeito da rigidez da fundacao para v = 200 m/s, L = 200 m, p = 25 rad/s, ζ = 0% e m2 = 0. 27
3.11 Efeito da velocidade do oscilador para kl = 250 kN/m2, L = 200 m, p = 5 rad/s, ζ = 0%
e m2 = 0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.12 Efeito da velocidade do oscilador para kl = 250 kN/m2, L = 200 m, p = 10 rad/s, ζ = 0%
e m2 = 0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.13 Efeito da velocidade do oscilador para kl = 250 kN/m2, L = 200 m, p = 25 rad/s, ζ = 0%
e m2 = 0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.14 Efeito da velocidade do oscilador para kl = 1000 kN/m2, L = 200 m, p = 5 rad/s, ζ = 0%
e m2 = 0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.15 Efeito da velocidade do oscilador para kl = 1000 kN/m2, L = 200 m, p = 10 rad/s, ζ = 0%
e m2 = 0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.16 Efeito da velocidade do oscilador para kl = 1000 kN/m2, L = 200 m, p = 25 rad/s, ζ = 0%
e m2 = 0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
83

3.17 Efeito do comprimento da viga para kl = 250 kN/m2, v = 100 m/s, p = 5 rad/s, ζ = 0% e
m2 = 0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.18 Efeito do comprimento da viga para kl = 250 kN/m2, v = 100 m/s, p = 10 rad/s, ζ = 0%
e m2 = 0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.19 Efeito do comprimento da viga para kl = 250 kN/m2, v = 100 m/s, p = 25 rad/s, ζ = 0%
e m2 = 0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.20 Efeito do comprimento da viga para kl = 250 kN/m2, v = 200 m/s, p = 5 rad/s, ζ = 0% e
m2 = 0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.21 Efeito do comprimento da viga para kl = 250 kN/m2, v = 200 m/s, p = 10 rad/s, ζ = 0%
e m2 = 0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
3.22 Efeito do comprimento da viga para kl = 250 kN/m2, v = 200 m/s, p = 25 rad/s, ζ = 0%
e m2 = 0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
3.23 Efeito do comprimento da viga para kl = 1000 kN/m2, v = 100 m/s, p = 5 rad/s, ζ = 0%
e m2 = 0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.24 Efeito do comprimento da viga para kl = 1000 kN/m2, v = 100 m/s, p = 10 rad/s, ζ = 0%
e m2 = 0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.25 Efeito do comprimento da viga para kl = 1000 kN/m2, v = 100 m/s, p = 25 rad/s, ζ = 0%
e m2 = 0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.26 Efeito do comprimento da viga para kl = 1000 kN/m2, v = 200 m/s, p = 5 rad/s, ζ = 0%
e m2 = 0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.27 Efeito do comprimento da viga para kl = 1000 kN/m2, v = 200 m/s, p = 10 rad/s, ζ = 0%
e m2 = 0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
3.28 Efeito do comprimento da viga para kl = 1000 kN/m2, v = 200 m/s, p = 25 rad/s, ζ = 0%
e m2 = 0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4.1 Fundacao nao linear do tipo cubica: representacao grafica da forca de reacao em funcao
do deslocamento. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.2 Resultados para uma fundacao uniforme com knl= 2.5 × 103 kN/m4, kl= 250 kN/m2,
sem amortecimento. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
4.3 Resultados para uma fundacao uniforme com knl= 2.5 × 104 kN/m4, kl= 250 kN/m2,
sem amortecimento. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
4.4 Resultados para uma fundacao uniforme com knl= 2.5 × 105 kN/m4, kl= 250 kN/m2,
sem amortecimento. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
4.5 Resultados para uma fundacao uniforme com knl= 2.5 × 103 kN/m4, kl= 250 kN/m2,
com amortecimento ζ= 2%. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
4.6 Resultados para uma fundacao uniforme com knl= 2.5 × 104 kN/m4, kl= 250 kN/m2,
com amortecimento ζ= 2%. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4.7 Resultados para uma fundacao uniforme com knl= 2.5 × 105 kN/m4, kl= 250 kN/m2,
com amortecimento ζ= 2%. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
84

4.8 Resultados para uma fundacao uniforme com knl= 5 × 103 kN/m4, kl= 500 kN/m2, sem
amortecimento. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
4.9 Resultados para uma fundacao uniforme com knl= 5 × 104 kN/m4, kl= 500 kN/m2, sem
amortecimento. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
4.10 Resultados para uma fundacao uniforme com knl= 5 × 105 kN/m4, kl= 500 kN/m2, sem
amortecimento. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4.11 Resultados para uma fundacao uniforme com knl= 5 × 103 kN/m4, kl= 500 kN/m2, com
amortecimento ζ= 2%. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4.12 Resultados para uma fundacao uniforme com knl= 5 × 104 kN/m4, kl= 500 kN/m2, com
amortecimento ζ= 2%. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4.13 Resultados para uma fundacao uniforme com knl= 5 × 105 kN/m4, kl= 500 kN/m2, com
amortecimento ζ= 2%. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4.14 Efeito da parcela nao linear da rigidez da fundacao para v= 100 m/s, kl= 250 kN/m2,
p= 5 rad/s e ζ= 0%. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.15 Efeito da parcela nao linear da rigidez da fundacao para v= 100 m/s, kl= 250 kN/m2,
p= 10 rad/s e ζ= 0%. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.16 Efeito da parcela nao linear da rigidez da fundacao para v= 100 m/s, kl= 250 kN/m2,
p= 25 rad/s e ζ= 0%. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.17 Efeito da parcela nao linear da rigidez da fundacao para v= 200 m/s, kl= 250 kN/m2,
p= 5 rad/s e ζ= 0%. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.18 Efeito da parcela nao linear da rigidez da fundacao para v= 200 m/s, kl= 250 kN/m2,
p= 10 rad/s e ζ= 0%. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.19 Efeito da parcela nao linear da rigidez da fundacao para v= 200 m/s, kl= 250 kN/m2,
p= 25 rad/s e ζ= 0%. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.20 Efeito da parcela nao linear da rigidez da fundacao para v= 100 m/s, kl= 500 kN/m2,
p= 5 rad/s e ζ= 0%. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
4.21 Efeito da parcela nao linear da rigidez da fundacao para v= 100 m/s, kl= 500 kN/m2,
p= 10 rad/s e ζ= 0%. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
4.22 Efeito da parcela nao linear da rigidez da fundacao para v= 100 m/s, kl= 500 kN/m2,
p= 25 rad/s e ζ= 0%. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.23 Efeito da parcela nao linear da rigidez da fundacao para v= 200 m/s, kl= 500 kN/m2,
p= 5 rad/s e ζ= 0%. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.24 Efeito da parcela nao linear da rigidez da fundacao para v= 200 m/s, kl= 500 kN/m2,
p= 10 rad/s e ζ= 0%. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4.25 Efeito da parcela nao linear da rigidez da fundacao para v= 200 m/s, kl= 500 kN/m2,
p= 25 rad/s e ζ= 0%. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
5.1 Diferentes situacoes de contacto consideradas entre a viga e a fundacao bilinear. . . . . 58
5.2 Representacao da relacao constitutiva bilinear de uma fundacao. . . . . . . . . . . . . . . 58
85

5.3 Elemento a levantar do lado esquerdo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
5.4 Elemento a levantar do lado direito. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
5.5 Elemento a levantar dos dois lados. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
5.6 Elemento a levantar no meio. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
5.7 Elemento a levantar totalmente. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
5.8 Elemento sem levantamento. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
5.9 Fundacao uniforme com kl+ = 250 kN/m2, kl− = 250 kN/m2, sem amortecimento. . . . 65
5.10 Fundacao uniforme com kl+ = 150 kN/m2, kl− = 250 kN/m2, sem amortecimento. . . . 65
5.11 Fundacao uniforme com kl+ = 75 kN/m2, kl− = 250 kN/m2, sem amortecimento. . . . . 66
5.12 Fundacao uniforme com kl+ = 25 kN/m2, kl− = 250 kN/m2, sem amortecimento. . . . . 66
5.13 Fundacao uniforme com kl+ = 0 kN/m2, kl− = 250 kN/m2, sem amortecimento. . . . . 67
5.14 Fundacao uniforme com kl+ = 250 kN/m2, kl− = 250 kN/m2, com amortecimento ζ =
2%. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
5.15 Fundacao uniforme com kl+ = 150 kN/m2, kl− = 250 kN/m2, com amortecimento ζ =
2%. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
5.16 Fundacao uniforme com kl+ = 75 kN/m2, kl− = 250 kN/m2, com amortecimento ζ = 2%. 68
5.17 Fundacao uniforme com kl+ = 25 kN/m2, kl− = 250 kN/m2, com amortecimento ζ = 2%. 69
5.18 Fundacao uniforme com kl+ = 0 kN/m2, kl− = 250 kN/m2, com amortecimento ζ = 2%. 69
5.19 Efeito da variacao da rigidez de tracao da fundacao kl+ para v = 150 m/s,
kl− = 250 kN/m2, p = 5 rad/s, e ζ = 0%. . . . . . . . . . . . . . . . . . . . . . . . . . . 71
5.20 Efeito da variacao da rigidez de tracao da fundacao kl+ para v = 150 m/s,
kl− = 250 kN/m2, p = 10 rad/s, e ζ = 0%. . . . . . . . . . . . . . . . . . . . . . . . . . . 71
5.21 Efeito da variacao da rigidez de tracao da fundacao kl+ para v = 150 m/s,
kl− = 250 kN/m2, p = 25 rad/s, e ζ = 0%. . . . . . . . . . . . . . . . . . . . . . . . . . . 72
5.22 Efeito da variacao da rigidez de tracao da fundacao kl+ para v = 200 m/s,
kl− = 2 50 kN/m2, p = 5 rad/s, e ζ = 0%. . . . . . . . . . . . . . . . . . . . . . . . . . . 72
5.23 Efeito da variacao da rigidez de tracao da fundacao kl+ para v = 200 m/s,
kl− = 250 kN/m2, p = 10 rad/s, e ζ = 0%. . . . . . . . . . . . . . . . . . . . . . . . . . . 73
5.24 Efeito da variacao da rigidez de tracao da fundacao kl+ para v = 200 m/s,
kl− = 250 kN/m2, p = 25 rad/s, e ζ = 0%. . . . . . . . . . . . . . . . . . . . . . . . . . . 73
86

Lista de Sımbolos
Sımbolos gregos
γ Peso volumico do material da viga.
φM Coeficiente de amplificacao dinamica do momento fletor a meio vao da viga.
φw Coeficiente de amplificacao dinamica do deslocamento a meio vao da viga.
ρ Massa volumica do material da viga.
τ Tempo total que o oscilador demora a percorrer a viga.
ζ Fator de amortecimento.
Sımbolos latinos
C Matriz de amortecimento.
d Vetor das coordenadas generalizadas.
K Matriz de rigidez.
M Matriz de massa.
Q Vetor das forcas generalizadas.
C Matriz global de amortecimento do modelo incluindo o oscilador.
K Matriz global de rigidez do modelo incluindo o oscilador.
M Matriz global de massa do modelo incluindo o oscilador.
Kb Matriz de rigidez elementar da viga.
Kf Matriz de rigidez elementar da fundacao.
Knl Matriz de rigidez nao linear da fundacao apos reuniao dos elemntos finitos.
A Area da seccao transversal.
c Coeficiente de amortecimento do oscilador.
E Modulo de elasticidade do material da viga elastica.
87

I Momento de inercia da seccao transversal da viga elastica.
k Rigidez do oscilador.
kl Parcela linear da rigidez da fundacao, por unidade de comprimento.
kl+ Rigidez da fundacao a tracao, por unidade de comprimento.
kl− Rigidez da fundacao a compressao, por unidade de comprimento.
knl Parcela nao linear da rigidez da fundacao, por unidade de comprimento.
L Comprimento da viga.
l Comprimento de um elemento finito.
M Momento fletor.
m1 Massa superior do oscilador.
m2 Massa inferior do oscilador.
Ni(x) Funcao de interpolacao relativa a coordenada generalizada i (i=1, ..., 4).
p Frequencia angular natural do oscilador.
r Forca de contacto entre a viga e o oscilador.
T Energia cinetica total.
t Tempo absoluto.
Ub Energia potencial elastica da viga.
Uf Energia potencial elastica da fundacao.
v Velocidade (constante) do oscilador.
w(x) Deslocamento transversal da seccao x da viga.
w0 Deslocamento transversal da seccao da viga em contacto com o oscilador.
y Deslocamento da massa m1.
Indices superiores
din Dinamico.
e Elementar.
est Estatico.
T Transposta/o.
88