-
8/13/2019 Cap2 - Mecanica das Estruturas - Conceitos Bsicos da
Mecnica das Estruturas
1/28
-
8/13/2019 Cap2 - Mecanica das Estruturas - Conceitos Bsicos da
Mecnica das Estruturas
2/28
2.2
Assim, os modelos estruturais so idealizaes fsicas (mecnicas)
cujas anlisesmatemticas representam de forma aproximada os
comportamentos dasestruturas reais.
As estruturas e os prprios modelos de anlise so formados em
geral por uma
associao de elementos estruturais, que individualmente podem
apresentardiferentes comportamentos fsicos-mecnicos em funo do
materialcomponente, tipo e nvel das aes atuantes, da forma
geomtrica e de suasligaes. A considerao da atuao conjunta dos
elementos que define osmecanismos resistentes efetivamente
mobilizados no processo de transmissodas foras e, conseqentemente,
o tipo e nvel de solicitaes, deformaes edeslocamentos que ocorrem
em cada uma das partes componentes.
O comportamento fsico do material definido por meio das
relaes
constitutivas tenso x deformao, podendo-se utilizar diferentes
tipos demodelos de comportamento, tais como: elstico linear ou no
linear, elasto-pltico, etc. Quando a resposta do material
dependente do tempo os modelosfsicos de comportamento podem ser:
visco-elastoplstico,
elasto-visco-plstico,elasto-viscoelastoplstico, etc.
Quando as aes atuantes so consideradas aplicadas de forma
gradual e comuma frequncia afastada da frequncia natural de vibrao
da estrutura, aresposta da estrutura varia suavemente ao longo do
tempo e tem-se, neste caso,um problema quase-esttico e pode-se
fazer uma anlise esttica.
Quando as aes so intensas e aplicadas em curto intervalo de
tempo, como asprovocadas por um impacto ou uma exploso ou as aes so
cclicas e afrequncia de aplicao se aproxima das frequncias naturais
de vibrao daestrutura, tm-se problemas que exigem anlises
dinmicas.
Em relao forma geomtrica, os elementos componentes de uma
estruturapodem ser classificados como blocos, elementos laminares
ou elementos de barra.Os blocos so elementos que apresentam as trs
dimenses com a mesma ordemde grandezas. So estudados com base na
Mecnica do Contnuo em trsdimenses, atravs da Teoria da Elasticidade
e/ou da Teoria da Plasticidade. Emalguns casos possvel avaliar este
comportamento atravs de modelos simplescom base no equilbrio de
polgonos de foras (modelo de bielas e tirantes)comprovados
experimentalmente. Como exemplo tem-se os blocos de fundao,de
coroamento de estacas de fundaes e consolos curtos.
-
8/13/2019 Cap2 - Mecanica das Estruturas - Conceitos Bsicos da
Mecnica das Estruturas
3/28
2.3
Os elementos laminares apresentam espessuras reduzidas em relao
sdimenses da superfcie. Quando a superfcie mdia plana tm-se as
placas e aschapas, quando esta superfcie curva tm-se as cascas. As
placas soestruturas laminares nas quais as cargas atuam
paralelamente ao plano mdio,ficando basicamente submetidas a um
estado plano de tenses. As placas por sua
vez recebem cargas normalmente ao seu plano mdio, ficando
submetidasessencialmente a esforos de flexo simples em duas
dimenses. As cascastrabalham essencialmente sob efeito de membrana,
com fluxos de tensesnormais acompanhando sua superfcie mdia e
efeitos localizados de flexo.
As estruturas laminares so estudadas tambm no mbito da Mecnica
doContnuo, utilizando-se teorias desenvolvidas especificamente para
os diferentestipos de comportamento. So exemplos de cascas as
abbadas de coberturas, asparedes de reservatrios de formas
cilndricas, tronco-cnicas e outras; as lajes
so exemplos de placas e as paredes estruturais e vigas de
chapas.
Os elementos de barra apresentam o comprimento com ordem de
grandezasuperior s demais dimenses, que formam a seo transversal.
As estruturas debarras so chamadas usualmente de estruturas
reticuladas e, em funo dageometria da estrutura, da forma das
ligaes entre os elementos e das aesatuantes, podem ser subdivididas
em: prticos planos ou espaciais, trelias planasou espaciais,
grelhas e vigas. So estudadas a partir das teorias decomportamento
definidas pela Resistncia dos Materiais.
2.1.2.Comportamento Bsico dos Materiais
Os diferentes materiais estruturais apresentam em geral
distintoscomportamentos fsicos, destacando-se os seguintes
comportamentos bsicos:
Materiais elsticos so aqueles que retomam a configurao inicial
apso descarregamento, no guardando deformaes residuais ou
permanentes;
Materiais elsticos lineares so os materiais elsticos que
apresentamrelaes lineares entre as tenses e as deformaes. So ditos
elsticosperfeitos e seguem a lei de Hooke de linearidade entre
tenses edeformaes, definida a partir do mdulo de elasticidade E
como:
E.= ; (2.1)
Materiais plsticos so aqueles que guardam deformaes residuais
ou
plticas aps o descarregamento, no recuperando sua forma original
aps aretirada das causas que provocaram as deformaes;
-
8/13/2019 Cap2 - Mecanica das Estruturas - Conceitos Bsicos da
Mecnica das Estruturas
4/28
2.4
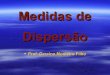
Materiais elasto-plsticos perfeitos so aqueles que aps uma
faseelstica linear apresentam um comportamento puramente plstico,
designadode escoamento do material.
carregamento
descarregamento
(a)
(b)
arc tg E
Figura 2.1. Grficos tenso x deformao: a) material elstico; b)
material
elstico linear.
mx
p e
p e (a) (b) (c)
Figura 2.2. Materiais Plsticos: a) plstico perfeito; b)
elasto-plstico; c) elasto-plstico perfeito.
2.1.3. Aes e Solicitaes
O nome ao designa qualquer influncia ou conjunto de influncias
capaz deproduzir estado de tenso ou deformao numa estrutura (peso
prprio, forasde vento, cargas mveis, recalques de apoios, variaes
de temperatura, etc.).
As aes podem ser classificadas em funo de sua natureza como
diretas ouindiretas:
Aes Diretas, decorrem de aplicaes diretas de foras, ocorrendo
porcontanto ou por efeito de campos (gravitacional por exemplo) :.
peso prprio da estrutura;
. peso de veculos ou de outras utilizaes;
. foras de vento;
. fora centrfuga, etc.
-
8/13/2019 Cap2 - Mecanica das Estruturas - Conceitos Bsicos da
Mecnica das Estruturas
5/28
2.5
Aes Indiretas, decorrem de deslocamentos ou deformaes impostas:.
deslocamentos de apoios;
. deformaes trmicas, por retrao, por protenso (ou pr-tenso),
etc.
Solicitao ou esforo solicitante designa qualquer esforo interno,
decorrentedas aes e aplicada a uma ou mais sees de um elemento
estrutural, tais comofora normal, fora cortante, momento fletor,
etc.
2.1.4. Tenses e Deformaes
As tenses so as foras por unidades de rea mobilizadas pelos
mecanismosresistentes responsveis pela transmisso das aes ao longo
da estrutura.
Conhecidas as tenses atuantes em uma seo transversal possvel
determinar-se esforos solicitantes correspondentes e vice-versa.
Assim, a partir deintegraes das tenses ao longo da seo transversal
obtm-se os esforossolicitantes e conhecidos os esforos solicitantes
possvel determinar astenses atuantes a partir dos modelos e
hipteses considerados pela Resistnciados Materiais.
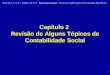
As deformaes so os deslocamentos relativos desenvolvidos nos
elementosestruturais devidas s tenses atuantes. Os deslocamentos so
os movimentos
sofridos por cada ponto da estrutura e decorrem das deformaes
existentes aolongo da estrutura. Na Figura (2.3 a e b) esto
representados as deformaesaxial, cisalhante, de flexo e de
toro.
X
Y
Y
Z
Z
dx
NxNx
dx
Qy
dxQy
dx
Mz Mz
dx
Mt Mt
Figura 2.3. Deformaes em elemento infinitesimal de uma barra
prismtica:
axial, cisalhante, de flexo e de toro.
-
8/13/2019 Cap2 - Mecanica das Estruturas - Conceitos Bsicos da
Mecnica das Estruturas
6/28
2.6
i) Tenses e Deformaes Axiais
Uma barra prismtica de seo transversal de rea A, solicitada por
uma foraaxial de trao igual a N, como representada na Figura (2.4),
fica submetida
tenses axiais X uniformes definidas por:
AN
X = (2.2)
As tenses produzem, considerando-se um material elstico-linear
(=E.),deformaes uniformes X, dadas por:
EA
N
E
X
X
=
= . (2.3)
O valor EA denominado rigidez axial da barra e mede a
dificuldade deformao axial da barra.
A variao de comprimento (d) ao longo de um trecho de
comprimentoinfinitesimal dx vale:
dx.d X= . (2.4)
A variao de comprimento total da barra () obtida pela integrao
davariao dao longo da barra, resultando:
EANLdx.
EANdx.d
L
0
L
0 X
L
0 ==== (2.5)
Nrea A
L Seo S
S
x dx
N N
D.xD.x dx
Figura 2.4. Barra prismtica submetida fora axial.
-
8/13/2019 Cap2 - Mecanica das Estruturas - Conceitos Bsicos da
Mecnica das Estruturas
7/28
2.7
ii) Tenses e Deformaes por Flexo
Em uma seo transversal S, de uma barra de material homogneo,
elstico eisotrpico, submetida a um momento fletor M, ficam
mobilizadas tenses normais
xde flexo dadas pela expresso:
yIMZ
x
= , (2.6)
onde Iz o momento de inrcia em relao ao eixo principal z:
=maxY
0
2Z dA.yI , (2.7)
y mede a distncia da linha neutra (eixo centroidal Z) ao
ponto
considerado na seo transversal, sendo o sinal negativo da
expresso devido aofato de que os momentos positivos produzem tenses
negativas (compresso)onde y positivo.
A deformao correspondente vale:
yI.EM
E Zx
x
=
= (2.8)
O ngulo de rotao relativa d entre duas sees distantes dx fica
definidapor:
dxI.E
My
dd
Z
XX =
= , (2.9)
sendo a quantia E.IZdesignada de rigidez flexo da barra.
dx
y
d
M M
D.xD.x
x dx
L
Seo S
S
x dx
M MZ
Y(a)
(b)
MM
L
(c)
Figura 2.5. Barra prismtica submetida flexo.
-
8/13/2019 Cap2 - Mecanica das Estruturas - Conceitos Bsicos da
Mecnica das Estruturas
8/28
2.8
Na viga em balano da Figura 2.6 submetida a momento fletor
constante ao longodo comprimento, a rotao na extremidade livre pode
ser obtida por integraodireta da expresso anterior, resultando:
Z
L
0 Z
L
0 I.EL.Mdx
I.EMd === (2.10)
iii)Tenses e Deformaes por Toro
Em uma barra de seo transversal circular de raio R, submetida a
um momentotorsor MT, ficam mobilizadas tenses normais de
cisalhamento , definidas numponto distante r do centride por:
rJ
MT= , (2.11)
Onde J o momento de Inrcia toro, que no caso de seo circular
igual aomomento de inrcia polar em relao centride da seo circular,
valendo para aseo de raio R:
2
RJ4
= . (2.12)
As tenses cisalhantes que atuam em sees transversais circulares
tm sempreuma direo normal ao raio e o mesmo sentido da toro
MTaplicada. A distoro na raio r igual tenso cisalhante dividida
pelo mdulo de elasticidadetransversal G do material:
GJr.M
GT=
= . (2.13)
Assim, a expresso que define a distoro mxima, onde r=R,
vale:
GJR.MT
MAX = , (2.14)
sendo o valor GJ que aparece nas expresses anteriores designada
como rigidez toro da barra.
O ngulo de rotao relativa dao longo de um elemento infinitesimal
dx, vale:
-
8/13/2019 Cap2 - Mecanica das Estruturas - Conceitos Bsicos da
Mecnica das Estruturas
9/28
-
8/13/2019 Cap2 - Mecanica das Estruturas - Conceitos Bsicos da
Mecnica das Estruturas
10/28
2.10
z
S
I.bQM
= , (2.18)
Onde Ms o momento esttico em relao ao eixo neutro (z), da
parcela da reada seo transversal definida pelo abcissa Y do ponto
considerado, valendo:
=Y
maxYS dA.yM , (2.19)
O deslocamento relativo provocado pelas tenses de cisalhamento d
dado por:
dxGAQfd = , (2.20)
sendo A a rea da seo transversal e f o fator que depende da
forma da seotransversal. O valor GA designada como rigidez ao
cortante dabarra.
Em alguns casos elementares, as flechas devidas a deformaes por
cortantepodem ser obtidas pela integrao direta da expresso
anterior, como no caso daviga em balano da Figura 2.8, resultando
neste caso:
GAPLfdx
GAQfd
L
0
L
0
c === . (2.21)
Assim, no caso da viga em balano com carga concentrada na
extremidade livre, odeslocamento total nesta extremidade vale:
GAPLf
EI3PL
z
3
cf +=+= , (2.22)
sendo f a parcela devido flexo. A relao entre a flecha produzida
pelo
cortante e a flecha produzida pelo cisalhamento vale 3fEIZ/GAL2,
que um valormuito pequeno, exceto no caso de vigas compactas (L/h
reduzido).
L
x dx
dx
Q
Q
d
Figura 2.7. Deformao por esforo
-
8/13/2019 Cap2 - Mecanica das Estruturas - Conceitos Bsicos da
Mecnica das Estruturas
11/28
2.11
Em certas estruturas as deformaes produzidas por determinados
esforos sorelativamente reduzidas e podem ser desprezadas. Em
outras estruturas, osvalores dos prprios esforos so reduzidos e,
portanto, tanto os esforosquanto as deformaes podem ser
desprezados.
Assim, por exemplo, em estruturas usuais esbeltas de prticos ou
vigas, asdeformaes por cisalhamento podem ser desprezadas em funo
da magnitudedas deformaes por flexo. No entanto, no caso de peas
robustas oucompactas com cargas elevadas estas deformaes podem
assumir valores nodesprezveis que devem ento ser consideradas.
Nas vigas carregadas transversalmente, no submetidas protenso,
as forasnormais e correspondentes deformaes axiais so em geral
desprezadas. Nocaso de vigas travadas longitudinalmente, por apoios
fixos ou elementos de
grande rigidez, e submetidas a esforos axiais de coao (variao
detemperatura ou retrao), estes esforos assumem valores elevados e
tambmno podem ser desprezados.
2.1.5. Estrutura de Barras de Comportamento Linear
As estruturas possuem dois tipos bsicos de comportamento: linear
ou no linear.As estruturas de comportamento linear so aquelas que
apresentam relaeslineares entre a as aes que sobre elas atuam e os
efeitos estruturaiscorrespondentes. Por efeitos estruturais
compreendem-se as solicitaes,tenses, reaes de apoio, deformaes e
deslocamentos mobilizados.
(a)
Aes
EfeitosEstruturais
(b)
Aes
EfeitosEstruturais
Figura 2.8. a) Estruturas de comportamento linear; b) estruturas
de
comportamento no linear.
Para que uma estrutura apresente comportamento linear necessrio
que hajalinearidade fsica e geomtrica, isto , o material
constituinte deve tercomportamento elstico linear e a estrutura
deve possuir uma geometria
adequada de modo que sendo mantido um regime de pequenas
deformaes, oequilbrio possa ser referido a posio indeformada da
estrutura.
-
8/13/2019 Cap2 - Mecanica das Estruturas - Conceitos Bsicos da
Mecnica das Estruturas
12/28
2.12
Assim, uma no linearidade fsica est associada ao comportamento
no linear domaterial. A no linearidade geomtrica ocorre quando
existe uma geometriadesfavorvel, na qual as condies de equilbrio s
possam ser satisfeitasconsiderando-se as deformaes da estrutura, ou
quando a estrutura atingir umregime de grandes deformaes a partir
do qual a mudana de geometria passe a
influenciar significativamente a prpria distribuio de esforos.
Neste caso, osesforos provocados pela alterao da geometria so
designados de esforos de2a ordem e devem ser considerados na anlise
estrutural.
Para exemplificar a ocorrncia de no linearidade geomtrica,
considere-se umaestrutura triarticulada com suas configuraes a e b
da Figura (2.9). Na primeiraestrutura impossvel a obteno do
equilbrio na posio indeformada, poisestando as barras com suas
extremidades rotuladas e o carregamento sendoefetuada na rtula
central de unio, as barras podem ser solicitadas unicamente
por esforos normais e, consequentemente, as reaes que poderiam
surgir naconfigurao inicial da estrutura, seriam incapazes de
equilibrar o sistema.
Na primeira estrutura, para obteno do equilbrio necessrio que
sejamconsideradas as rotaes sofridas pelas barras
componentes,independentemente do valor da amplitude da flecha f ou
das rotaes . Nessecaso diz-se que ocorre uma no linearidade
geomtrica funo da formainadequada e a prpria soluo do modelo
estrutural exige a considerao damudana de geometria definida pela
flechaf e rotaes .
f
(b)
f
(a)
P
P
Pf
(c)
Figura 2.9. a) Estrutura de comportamento no linear com
geometria inadequada;b) Estrutura cujo comportamento no linear pode
se dar pelo comportamento nolinear do material ou por um regime de
grandes deformaes; c) Estrutura cujo
comportamento est condicionado unicamente ao comportamento do
material.
-
8/13/2019 Cap2 - Mecanica das Estruturas - Conceitos Bsicos da
Mecnica das Estruturas
13/28
2.13
A configurao da estrutura representada na Figura (2.9b), onde as
barrasapresentam uma inclinao inicial , permite o equilbrio da
estrutura.Entretanto, a ocorrncia de carga elevada pode conduzir a
um grande valor paraa flecha f, que tenha como conseqncia rotaes no
desprezveis, quepossam provocar alteraes significativas nos esforos
solicitantes das barras.
Nesse caso diz-se ocorre uma no linearidade geomtrica devido a
um regime degrandes deformaes. importante frisar que esta no
linearidade funo damudana relativa da forma inicial, depende da
intensidade das rotaes sofridas()em relao as inclinaes iniciais
().
Para a estrutura da Figura (2.9c), o carregamento no capaz de
produziralteraes na inclinao da barra e, consequentemente, a
estrutura apresenta umcomportamento linear enquanto o material
constituinte se mantiver numa faseelstica linear, independentemente
de um regime de pequenas ou grandes
deformaes.
Considerando agora a estrutura definida por uma viga em balano,
conforme aFigura (2.10a), as deformaes sofridas pelo eixo da barra
provocaro umencurtamento em sua projeo horizontal, reduzindo as
distncias entre o pontode aplicao da carga P e qualquer seo da
barra, que define o valor do momentofletor atuante, alm de produzir
solicitaes normais adicionais em parte da viga.Nesse caso, a
ocorrncia de uma no linearidade geomtrica est condicionadaexistncia
de um regime de grandes deformaes onde as rotaes sofridas nopossam
ser desprezadas.
X
x
Y
L
P(a)
YP
e
x~e+
x
X
(b)
Figura 2.10. a) Viga em balano; b) Coluna com carga
excntrica.
Para uma barra solicitada por compresso excntrica, conforme a
Figura (2.3b),as deformaes provocadas pelos esforos de flexo tendem
a aumentar aintensidade destes esforos, podendo ocorrer um aumento
significativo (de valorP.x) que no possa ser desprezado.
-
8/13/2019 Cap2 - Mecanica das Estruturas - Conceitos Bsicos da
Mecnica das Estruturas
14/28
2.14
No caso de edifcios de andares mltiplos deslocveis, os efeitos
de segundaordem, denominado efeito P., mesmo para cargas
originariamente centradas,tem origem nas deformaes apresentadas
pelas colunas devido flexoproduzida pela fora horizontal de arrasto
do vento.
Assim, de modo geral, diz-se que uma estrutura possui um
comportamento lineargeomtrico quando as rotaes sofridas por seus
elementos podem serdesprezadas e os esforos solicitantes podem ento
serem calculadosconsiderando-se a configurao inicial da
estrutura.
Nas estruturas de comportamento linear vlido o princpio da
superposio dosefeitos, o qual considera que qualquer efeito
estrutural produzido por umconjunto de aes igual soma dos efeitos
produzidos por cada aoisoladamente.
2.2. GRAUS DE LIBERDADE. APOIOS E LIGAES. ESTATICIDADE
EESTABILIDADE. GRAU DE INDETERMINAO ESTTICA ECINEMTICA
2.2.1. Graus de Liberdade. Apoios. Ligaes Internas
Graus de liberdade de uma estrutura so os diferentes
deslocamentosindependentes que podem ocorrer em cada ponto numa
estrutura e que soconsiderados na anlise do modelo correspondente.
Em geral, a cada grau deliberdade ou a cada diferente deslocamento
considerado na anlise associadoum esforo solicitante. Assim, na
anlise de uma estrutura tipo prtico espacialso considerados os 6
(seis) possveis graus de liberdade no espao, sendo 3(trs) de
translao e 3 (trs) de rotao.
Considerando-se um sistema cartesiano de referncia os graus de
liberdade sodefinidos, conforme a Figura (2.11), por: uX, vY, wz,
X, Y e Z. Associados a estesgraus de liberdade tem-se, por exemplo,
para uma barra paralela a direo doeixo X, os esforos solicitantes
de: fora normal em X (Nx), esforo cortante nadireo Y (Qy), esforo
cortante na direo Z (Qz), momento torsor na direo x(Mx = Mt),
momento de flexo na direo Y (My) e momento de flexo na direoZ
(Mz).
-
8/13/2019 Cap2 - Mecanica das Estruturas - Conceitos Bsicos da
Mecnica das Estruturas
15/28
2.15
X
Y
Z
uXvY
wZ
X
Y
Z
Figura 2.11. Graus de liberdade de um prtico espacial.
Uma estrutura reticulada formada por um conjunto de barras,
existindoinfinitos pontos e, para cada um deles, podem ser
associados os graus deliberdade considerados no comportamento no
modelo. No entanto, possveldefinir o campo de deslocamentos ao
longo das barras de forma simplificada, pormeio de relaes adequadas
aplicadas aos respectivos deslocamentos (ou grausde liberdade)
associados a determinados pontos das barras, em geral situadosnas
extremidades, designados de ns da estrutura.
Neste caso, a estrutura fica representada por um modelo discreto
e o campo dedeslocamentos de toda a estrutura fica definido a
partir de um nmero limitado(finito) de graus de liberdade ou
deslocamentos nodais. A princpio, todaestrutura pode ser
subdividida em um conjunto arbitrrio de barras conectadasentre si
pelos correspondentes ns.
Assim, no prtico plano da Figura (2.12), considerando-se a
existncia de 3barras e quatro ns tem-se 12 deslocamentos
nodais.
X
Y
uX
vY
Z
u1
u2
u3
u4
v11
v
2
v3
v4
2
3
4
1
2
3
4
Figura 2.12. Deslocamentos nodais de um prtico plano.
-
8/13/2019 Cap2 - Mecanica das Estruturas - Conceitos Bsicos da
Mecnica das Estruturas
16/28
2.16
Apoios so vnculos externos que impedem o movimento da estrutura
em uma oumais direes. Quando as aes atuantes provocam tendncias de
movimento nadireo de deslocamentos impedidos, so mobilizadas reaes
nos apoios queimpedem os correspondentes movimentos. Os apoios so
definidos em funo do
nmero de deslocamentos impedidos. Assim, em problemas planos, os
apoiospodem ser de 10, 20 ou 30grau geomtrico. Os mais usuais so
os: apoio simplesoucharriot (10grau) que impede um deslocamento de
translao; apoio fixo ouarticulao/rtula fixa (20grau) que impede os
dois deslocamento de translaono plano e o engaste (30grau) que
impede todos os deslocamentos independentesno plano, sendo dois de
translao e o de rotao.
Ligaes so vnculos internos entre dois ou mais elementos.
Usualmente namodelagem (definio de um modelo discreto) de uma
estrutura so utilizados
ns (ou ligaes) em sees contnuas que apresentam rigidezes que
impedemtodos os deslocamentos relativos entre as barras ligadas e,
consequentemente,transmitem os diferentes esforos solicitantes
considerados na anlise.
Entretanto, eventualmente estas ligaes podem ser incompletas,
isto , podempermitir um ou mais deslocamentos relativos entre as
barras ligadas e, nestescasos, os esforos solicitantes
correspondentes s direes liberadas no podemser transmitidos pela
ligao. O tipo de ligao incompleta mais comum so asrtulas, que
permitem ou liberam o movimento de rotao entre os elementosligados
e so incapazes de transmitir esforos de flexo.
R
(a)
R1
R2
R1
R2
R3
rtula interna
(b)
Figura 2.13. a) Apoios usuais em estruturas planas; b) Rtula
interna num prtico.
2.2.2. Equilbrio. Compatibilidade. Estaticidade e
Estabilidade
-
8/13/2019 Cap2 - Mecanica das Estruturas - Conceitos Bsicos da
Mecnica das Estruturas
17/28
2.17
As estruturas das construes devem ter vnculos externos (apoios)
e internos(ligaes) entre seus elementos componentes que garantam
uma condio deequilbrio esttico, tanto para a estrutura como um todo
como para cada um deseus elementos ou partes componentes. Neste
caso as resultantes das foras
atuantes em cada parte ou em toda a estrutura, definidas pelas
foras externasaplicadas e/ou pelos esforos internos, devem ser
nulas.
Alm disso, necessrio tambm que sejam respeitadas as condies
decompatibilidade do campo de deslocamentos. Estas condies de
compatibilidadedevem atender as prescries de apoios, onde os
deslocamentos so impostos(em geral nulos) e de continuidade no
interior da estrutura. Assim, por exemplo,em um apoio externo
definido por um engaste, todos os deslocamentos tanto detranslao
quanto de rotao so nulos. Em um n rgido de ligao entre dois ou
mais elementos, cada um destes elementos devem apresentar os
mesmosdeslocamentos de translao e rotao.
As estruturas podem ser classificadas em relao s condies
disponveis paraobteno das foras (reaes e esforos solicitantes)
atuantes ao longo daestrutura como: isostticas, hiperestticas ou
hipostticas. Uma estrutura ditade isosttica, quando os vnculos
(apoios e ligaes internas) existentes, so emquantidade estritamente
necessria para impedir todos os movimentos de corporgido, de cada
parte componente e da estrutura como um todo. Neste caso aestrutura
estaticamente determinada, sendo possvel obter as reaes deapoio
utilizando-se as equaes de equilbrio disponveis, bem como calcular
osesforos em qualquer ponto da estrutura.
As estruturas isostticas tm condio de equilbrio estvel, no
possuindonenhum grau de liberdade associado a um movimento de corpo
rgido. Osdeslocamentos decorrem simplesmente das deformaes
mobilizadas ao longo daestrutura.
Assim, para um problema de prtico plano as equaes de equilbrio
esttico sodefinidas por:
=== 0;Me0F0;F z,Ayx (2.11)
Cada uma destas equaes garante o equilbrio em relao aos
possveisdeslocamentos considerados no comportamento da
estrutura.
-
8/13/2019 Cap2 - Mecanica das Estruturas - Conceitos Bsicos da
Mecnica das Estruturas
18/28
2.18
Em algumas estruturas possvel utilizar equaes que traduzem
condies locaisde equilbrio em relao s foras externas, como por
exemplo, nas estruturascom rtulas internas. Assim, no prtico
triarticulado da Figura (2.14d), alm dasequaes de equilbrio global,
dispe-se de uma equao adicional que traduz aimpossibilidade de
transmisso de momento na rtula G, traduzida por:
0MMM GdG
eG === (2.12)
(a) (b)
(c)
(d)
G
Figura 2.14. Algumas estruturas isostticas: a) viga biapoiada
com balano; b)prtico com uma extremidade engastada e as demais
livres; c) viga treliada
biapoiada tipo tesoura Howe; d) arco triarticulado.
Quando o nmero de vnculos superior ao estritamente necessrio
para impediros movimentos de corpo rgido, tem-se uma estrutura
hiperesttica. O excessode vnculos ou os vnculos superabundantes
podem ser externos e/ou internos,consequentemente uma estrutura
pode ser hiperesttica internamente e/ou
externamente. As estruturas hiperestticas apresentam condies de
equilbrioestvel.
A anlise de estruturas hiperestticas feita empregando-se
equaesadicionais s de equilbrio esttico. Estas equaes adicionais
podem ser obtidasutilizando-se condies locais de equilbrio esttico
ou de compatibilidade docampo de deslocamentos.
-
8/13/2019 Cap2 - Mecanica das Estruturas - Conceitos Bsicos da
Mecnica das Estruturas
19/28
2.19
(a)
(b)(c)
(d)
Figura 2.15. Algumas estruturas hiperestticas: a) viga contnua;
b) prtico comambas as extremidades engastadas; c) prtico biapoiado
formando internamenteum quadro fechado; d) viga treliada de altura
constante com diagonais cruzadas.
Quando o nmero de vnculos insuficiente para impedir os
movimentos de corporgido da estrutura como um todo ou de suas
partes, diz-se que a estrutura hiposttica. Neste caso, tem-se um
mecanismo ou cadeia cinemtica, queapresenta algum tipo de liberdade
de movimento de corpo rgido. As estruturashipostticas no apresentam
em geral condies de equilbrio. Quando forpossvel uma condio de
equilbrio, tem-se ento um equilbrio instvel, pois aocorrncia de
qualquer fora na direo do deslocamento possvel ir desfazer
aestabilidade do equilbrio.
2.2.3. Grau de Indeterminao Esttica e Cinemtica
Em uma estrutura qualquer, h dois tipos de indeterminao que
devem serconsiderados em funo do tipo de anlise a ser efetuada.
Quando se consideramas variveis primrias de interesse ou incgnitas
bsicas da anlise, como sendoas foras ou esforos atuantes nos
elementos que compem a estrutura, deve-seconsiderar a indeterminao
esttica. Quando as variveis primrias de interesseou as incgnitas
bsicas da anlise so os deslocamentos deve-se considerar a
indeterminao cinemtica.
Assim, quando as variveis primrias de interesse so os esforos
atuantes, aindeterminao esttica e o grau de indeterminao definido
pelo nmero deVnculos (ligaes internas ou apoios externos) em
excesso em relao aoestritamente necessrio para manter a estrutura
em condio de equilbrioestvel. Assim, as estruturas isostticas
possuem grau nulo de indeterminaoesttica. Nas estruturas
hiperestticas o grau de indeterminao esttica, quedefine o nmero de
vnculos superabundantes, pode ser obtido pelo nmero de
vnculos que necessitam ser liberados para tornar a estrutura
isosttica.
-
8/13/2019 Cap2 - Mecanica das Estruturas - Conceitos Bsicos da
Mecnica das Estruturas
20/28
2.20
O grau de indeterminao cinemtica definido diretamente pelo nmero
dedeslocamentos nodais incgnitos.
(a)
(b)(c)
n=3
n=3n=6
(d) n=6
Figura 2.16. Grau de indeterminao esttico de algumas
estruturas
hiperestticas com uma das possibilidades de liberaes para se
obter umaestrutura isosttica
(a)
(b) (c)
(d)
1 2 3 4
1
2 3
41
2 3
4
56
7
n=5
n=9
n=15
n=25
Figura 2.17. Grau de indeterminao cinemtica e respectivos
deslocamentosnodais incgnitos de algumas estruturas
-
8/13/2019 Cap2 - Mecanica das Estruturas - Conceitos Bsicos da
Mecnica das Estruturas
21/28
2.21
2.3. FLEXIBILIDADE E RIGIDEZ. EQUAES DE COMPATIBILIDADE EDE
EQUILBRIO. MTODO DA FLEXIBILIDADE E DA RIGIDEZ
2.3.1. Flexibilidade e Rigidez. Equaes de Compatibilidade
deDeslocamentos e de Equilbrio de Foras
A relao entre o valor da fora aplicada em um ponto qualquer e o
deslocamentoque ocorre em um outro ponto qualquer de um elemento ou
componenteestrutural, define a rigidez deste elemento ou componente
associada aos grausde liberdades considerados. A relao inversa
define a correspondenteflexibilidade. Assim, o valor da rigidez
pode ser obtido pelo esforo mobilizadodevido imposio de um
deslocamento de valor unitrio, medindo assim adificuldade de
deformao em relao ao deslocamento correspondente. A
flexibilidade por sua vez pode ser obtida pelo deslocamento
produzido por umafora de valor unitrio, medindo assim a facilidade
de deformaocorrespondente.
Seja o exemplo elementar de uma mola elstica submetida a uma
fora P. Se odeslocamento sofrido pela mola, conforme representado
na Figura (2.18) aequao que representa o equilbrio de foras atuando
na mola definida por:
K.=F , (2.13)
sendo K, a rigidez da mola, numericamente igual ao esforo que
surge na molaquando se impe um deslocamento de valor unitrio em sua
extremidade.
Pd
Figura 2.18 - Mola Elstica.A equao que representa a
compatibilidade no campo de deslocamento
definida por:
K'.F= , (2.14)
sendo K, a flexibilidade da mola, numericamente igual ao
deslocamentomobilizado na mola quando se impe uma fora F de valor
unitrio em sua
extremidade.
-
8/13/2019 Cap2 - Mecanica das Estruturas - Conceitos Bsicos da
Mecnica das Estruturas
22/28
2.22
Verifica-se facilmente que a flexibilidade e a rigidez da mola
so uma a inversada outra:
1-K'=.K'1=k (2.15)
e:
1-KK1=K' = . (2.16)
F =11S'21
S'11
S'22
S'12
F =12
(b)
d =11
S21
S 11
(c)
d =12
S22S 12
F1F2
(a)d1
d2
Figura 2.19 - Viga elstica: a) Foras no balano F1e F2 e
deslocamentos
correspondentes d1e d2; b) Coeficientes de flexibilidade ou
deslocamentos nasdirees d1e d2, devido a foras unitrias aplicadas,
respectivamente, F1 = 1 e F2=
1; c) Coeficientes de rigidez ou esforos nas direes F1e F2,
devido adeslocamentos unitrias impostos, respectivamente, d1 = 1 e
d2= 1
Seja agora como exemplo, a estrutura simples de comportamento
elstico linear,formada por uma viga biapoiada com balano em uma
extremidade, conforme aFigura (2.19a). Considerando-se duas foras
aplicadas na extremidade do balano
F1 e F2, e os correspondentes deslocamentos d1 e d2, com base no
princpio dasuperposio pode-se escrever as seguintes equaes de
compatibilidade dedeslocamentos nestas mesmas direes:
2221212
2121111
.FS+.FS=d.FS+.FS=d
, (2.17)
sendo Sij, o coeficiente de flexibilidade associado s direes
dosdeslocamentos die dj, definido como o deslocamento que surge na
direo de di
devido aplicao de uma fora unitria na direo dj, conforme a
Figura (2.19b).
-
8/13/2019 Cap2 - Mecanica das Estruturas - Conceitos Bsicos da
Mecnica das Estruturas
23/28
2.23
Ao invs de escrever as equaes de compatibilidade, que exprimem
osdeslocamentos em funo das foras, possvel se escrever as equaes
deequilbrio, definindo as foras em funo dos deslocamentos como:
2221212
2121111
.dS+.dS=F
.dS+.dS=F (2.18)
sendo Sij, o coeficiente de rigidez associado aos deslocamentos
nas direes diedj, definido como a fora que surge na direo de d i
devido imposio de umdeslocamento de valor unitrio na direo dj,
conforme a Figura (2.19c).
2.3.2. Mtodo da Flexibilidade e Mtodo da Rigidez.
Na anlise do comportamento de uma estrutura, as foras ou os
deslocamentospodem ser definidos como incgnitas bsicas ou variveis
primrias da anlise. Noprimeiro caso tem-se o modelo de foras e, no
segundo, o modelo dedeslocamentos. Nos casos de anlises de
estruturas de barras de comportamentolinear, nos quais vlido o
princpio da superposio, estes modelos de anlise sousualmente
designados, respectivamente, de Mtodo da Flexibilidade e Mtododa
Rigidez.
Na anlise estrutural com base no Mtodo da Flexibilidade, as
incgnitas bsicas
(variveis primrias) so definidas pelos esforos associados aos
vnculossuperabundantes, denominados de incgnitas hiperestticas.
Assim, estruturasisostticas no apresentam nenhuma incgnita pelo
Mtodo das Foras, uma vezque so estaticamente determinadas. A partir
das incgnitas hiperestticas, osdemais esforos atuantes nas
extremidades das barras podem ser obtidos comemprego das equaes de
equilbrio esttico disponveis. Alm disso, a partir dosesforos de
extremidades de cada barra podem ser obtidos os esforossolicitantes
em qualquer ponto da barra considerada.
Como relatado, na anlise de uma estrutura hiperesttica pelo
Mtodo daFlexibilidade necessrio de incio definir as incgnitas
bsicas, associadas aosvnculos superabundantes escolhidos,
designadas de incgnitas ou esforoshiperestticos. Esta escolha pode,
em geral, ser feita de muitas diferentesformas para uma mesma
estrutura, mas quaisquer que sejam as incgnitashiperestticas
escolhidas, elas devem ser sempre em nmero igual ao grau
deindeterminao esttica da estrutura.
A partir da escolha das incgnitas hiperestticas pode-se montar,
com base noprincpio da superposio, uma adequada equao de
compatibilidade de
-
8/13/2019 Cap2 - Mecanica das Estruturas - Conceitos Bsicos da
Mecnica das Estruturas
24/28
2.24
deslocamento associada direo de cada uma das incgnitas
hiperesttica. Cadauma destas equaes de compatibilidade ir
relacionar uma ou vrias incgnitashiperestticas, dependendo da forma
da estrutura e das incgnitas escolhidas.
A idia bsica para a formulao do mtodo da flexibilidade consiste
em se
considerar que o comportamento da estrutura hiperesttica
original, com base noprincpio da superposio, igual ao comportamento
da estrutura obtida pelaliberao dos vnculos superabundantes
submetida s cargas externas aplicadas,somado ao comportamento desta
mesma estrutura liberada submetida ao decada um dos esforos
hiperestticos. A estrutura liberada obtida com aeliminao dos
vnculos superabundantes designada de sistema principal.
Assim, o processo de clculo do Mtodo da Flexibilidade envolve
ento asseguintes etapas:
Escolha das incgnitas ou esforos hiperestticos (Xi) e do sistema
principalassociado, definido como a estrutura isosttica obtida a
partir da estruturaoriginal pela liberao dos vnculos
correspondentes s incgnitas hiperestticasescolhidas;
determinao dos deslocamentos (i0) no sistema principal, nas
direes dasincgnitas hiperestticas, devido s aes externas aplicadas
estrutura;
determinao dos deslocamentos (ij) no sistema principal, nas
direes dasincgnitas hiperestticas, devido a cada uma das incgnitas
hiperestticas
atuando isoladamente (com as demais nulas) com valor unitrio;
montagem do sistema de equaes de compatibilidade de deslocamentos
relativas
s direes correspondentes s incgnitas hiperestticas. Quando as
aesatuantes no decorrem de um deslocamento de apoio, as equaes
decompatibilidade representam ou uma continuidade no campo de
deslocamentos(caso de incgnitas representativas de um esforo
solicitante interno) ou umimpedimento de deslocamento (caso de
incgnitas representativas de uma reaode apoio ou esforo externo),
podendo serem escritas genericamente na forma:
0X+XX0X+XX
0X+XX
n0nnn2n21n1
20n2n222121
10n1n212111
=+++
=+++=+++
L
MMMM
L
L
, (2.19)
determinao dos esforos hiperestticos (Xi) pela soluo do sistema
deequaes anterior, clculo das reaes de apoio e dos esforos nos
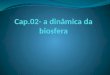
demais pontosde interesse da estrutura.Assim, por exemplo, seja
efetuar a anlise da viga contnua representada na
Figura (2.20). As incgnitas hiperestticas podem, a princpio,
serem escolhidasde diferentes modos como, por exemplo, considerando
os momentos fletores nos
-
8/13/2019 Cap2 - Mecanica das Estruturas - Conceitos Bsicos da
Mecnica das Estruturas
25/28
2.25
apoios (uma reao de apoio e dois esforos solicitantes internos)
ou as reaesverticais, conforme representado na Figura (2.21).
1
3 421
2 3 4
L1 L2 L3 L4
5
q1 q2 q3 q4Y, v
q
Figura 2.20 - Viga contnua com grau de indeterminao esttica
trs.
1 2 3 4
L1 L2 L3 L4
q3q1 q2 q4
X1 X2 X3
41 2 3 4
L1 L2 L3 L4
5
q1 q2 q3 q4
X3X2X1
(a)
(b)
Figura 2.21 - Escolha do sistema principal: a) Com liberao das
rotaes nosapoios e momentos fletores como incgnitas hiperestticas;
b) Com liberao dos
deslocamentos verticais e reaes verticais como incgnitas
hiperestticas.
1 3 421 2 3 4 5
q1 q2 q3 q4Y, v
q
elstica ou linha deformada da viga
1 2 3 4
X1 X2 X3
(a)
(b)
2d
2e
=01 3d
3e1
3 421 2 3 4 5(c)
q1 q2 q3 q4
Figura 2.22: a) Viga original com representao da elstica ou
deformada; b)Sistema principal e incgnitas hiperestticas; c)
deslocamentos de rotaoassociados s incgnitas hiperestticas
definidas por momentos nos apoios.
As equaes a serem montadas refletem as condies de
compatibilidade dos
deslocamentos nas direes das incgnitas hiperestticas. Assim, no
primeiro
-
8/13/2019 Cap2 - Mecanica das Estruturas - Conceitos Bsicos da
Mecnica das Estruturas
26/28
2.26
caso utilizam-se equaes de compatibilidade de rotaes
representadas naFigura (2.22) e definidas por:
01 = ;d2
e2 = e
d3
e3 = . (2.20)
No segundo caso, representado na Figura 2.23, utilizam-se equaes
decompatibilidade relativas aos deslocamentos verticais definidas
por:
0v1= ; 0v2= e 0v3= (2.21)(a)
41 2 3 4 5
X3X2X1
(b)
1 3 421 2 3 4 5
q1 q2 q3 q4Y, v
elstica ou linha deformada da viga
(c)
1 3 421 2 3 4 5
1
2
2
= v = 01 = v = 02= v = 0
2
q1 q2 q3 q4
Figura 2.23 a) Linha elstica ou deformada; b) Sistema principal
e incgnitas
hiperestticas; c) deslocamentos de rotao associados s
incgnitashiperestticas definidas por momentos nos apoios.
O sistema de equaes de compatibilidade definido de forma genrica
em (2.19)pode ser escrito em forma matricial como:
[ ]{ } { }0X = (2.22)
sendo a matriz [ ] designada de matriz de flexibilidade da
estrutura associadas incgnitas hiperestticas escolhidas.
Com base no teorema dos deslocamentos recprocos (Maxwell)
prova-se aexistncia de simetria na matriz de flexibilidade, isto
:
jiij = , (2.23)
A soluo do sistema pode ser obtida fazendo-se:
{ } [ ] { }01.X = (2.24)
2.3.3. Mtodo da Rigidez
-
8/13/2019 Cap2 - Mecanica das Estruturas - Conceitos Bsicos da
Mecnica das Estruturas
27/28
2.27
Na anlise estrutural com o Mtodo da Rigidez as incgnitas bsicas
ou variveisprimrias so definidas pelos deslocamentos nodais
incgnitos ou incgnitascinemticas do problema. A partir da definio
da geometria da estrutura e dosapoios externos, todos os demais
deslocamentos nodais constituem-se emincgnitas cinemticas do
problema.
A formulao do Mtodo da Rigidez pode ser desenvolvida com base no
princpioda superposio, a partir da adequada montagem da equao de
equilbrio deforas na direo de cada uma das incgnitas
cinemticas.
A idia bsica para a formulao do mtodo da rigidez consiste em se
considerarque o comportamento da estrutura original, com base no
princpio dasuperposio, igual ao comportamento da estrutura
restringida, obtida peloimpedimento aos deslocamentos nodais,
submetida s cargas externas aplicadas,
somado ao comportamento desta mesma estrutura restringida
submetida aode cada um dos deslocamentos nodais. Assim, o processo
de clculo do Mtodo daRigidez envolve ento as seguintes etapas:
determinao dos esforos (Fio) na estrutura restringida, nas
direes dasincgnitas cinemticas, devido s aes externas aplicadas
estrutura;
determinao dos esforos (sij) na estrutura restringida, nas
direes dasincgnitas cinemticas, devido a cada uma das incgnitas
cinemticas atuando
isoladamente (com as demais nulas) com valor unitrio; montagem
do sistema de equaes de equilbrio de foras relativas s direes
correspondentes s incgnitas cinemticas, que podem ser
escritasgenericamente na forma:
0Fds+dsds
0Fds+dsds
0Fds+dsds
n0nnn2n21n1
20n2n222121
10n1n212111
=+++
=+++
=+++
L
MMMM
L
L
(2.25)
determinao dos deslocamentos nodais incgnitos (di) pela soluo do
sistema deequaes anterior, determinao dos esforos nas extremidades
das barras,clculo das reaes de apoio e dos esforos e ou
deslocamentos nos demaispontos de interesse da estrutura.
Na anlise da viga contnua definida na Figura (2.233), as
incgnitas cinemticas
associadas s barras que formam a estrutura so definidas de forma
nica.Desprezando-se a presena de eventuais foras normais e
respectivas
-
8/13/2019 Cap2 - Mecanica das Estruturas - Conceitos Bsicos da
Mecnica das Estruturas
28/28
deformaes, os deslocamentos nodais incgnitos so os representados
na Figura(2.24).
1 2 3 4(b)
(a)
q1 q2 q3 q4
1 3 421 2 3 4 5
Y, v
elstica ou linha deformada da viga
(c)1
3 421 2 3 4 5
d1= 2d2 = 3 d3= 4 d4 = v5
d5= 5
Figura 2.24 - a) viga de quatro elementos e cinco ns; b)
estrutura restringida; c)
incgnitas cinemticas ou deslocamentos nodais incgnitos.
As equaes a serem montadas refletem as condies de equilbrio das
forasnas direes deslocamentos nodais incgnitos. Assim, utilizam-se
equaes deequilbrio de momentos fletores nas direes dos
deslocamentos 2, 3, 4e 5, eequilbrio de foras verticais na direo de
v5.
O sistema de equaes de equilbrio definido de forma genrica em
(2.25) podeser escrito em forma matricial como:
[ ]{ } { }FdS = , (2.26)
sendo a matriz [ ]S designada de matriz de rigidez da estrutura
associada sincgnitas cinemticas do problema.
A soluo do sistema pode efetuada fazendo-se:{ } [ ] { }FSd -1 =
. (2.27)
Deve-se ter em mente que a matriz de rigidez de uma estrutura
igual inversada matriz de flexibilidade e vice-versa, apenas quando
ambas as matrizes soobtidas considerando-se o mesmo conjunto de
deslocamentos e foras nodaiscorrespondentes.