Embed Size (px)
Citation preview

Circuito eletrônico
Os circuitos eletrônicos diferem dos circuitos elétricos por possuírem
interligações entre diversos componentes eletrônicos, enquanto os circuitos
elétricos somente têm conexões entre componentes elétricos.
Com o advento da miniaturização, veio a necessidade de uma
aglomeração mais compacta entre os componentes e peças formadoras do
circuito eletrônico. Esta nova plataforma de montagem era totalmente
diferente dos antigos chassis e suas pontes de conexão. Inicialmente os
circuitos começaram a ser aglomerados em placas de materiais isolantes
com furos onde de um lado se inseriam as pernas dos componentes e na
outra face eram soldados os fios das conexões. Este processo, além de
demorado acabava por complicar a montagem, aumentando a probabilidade
de erros.
Passou-se então a se utilizar um método de alta escala de produção
chamado de circuito impresso. Os circuitos impressos utilizam componentes
como resistores, capacitores, transístores, entre outros.
Antes os componentes eram soldados um a um nas pontes com o uso
de ferros de solda. Com o novo método, os componentes eram dispostos
numa placa de material isolante, onde numa das faces eram feitas as
ligações através de um método de impressão e corrosão de uma fina película
de cobre. Esta película ficava após corroída com a fiação impressa exposta.
Ao inserir os componentes nos furos feitos na placa isolante, suas pernas
eram cortadas e a face de ligação onde estavam, era imersa em estanho
derretido. Após retirar o circuito que estava em contato com o estanho, os
componentes já estavam presos ao cobre de forma fixa, rápida e perfeita.
Modernamente os circuitos eletrônicos são muito mais complexos,
além dos métodos normais de circuitos impressos existem outras formas
muito mais avançadas de produção. O circuito eletrônico, deixou de ser um
circuito propriamente dito, passou a ser encarado como um componente
eletrônico. Exemplos são os circuitos integrados, microprocessadores, entre
outros.

Circuito Integrado
Em eletrônica, um circuito integrado (também conhecido como CI,
microcomputador, microchip, chip de silício, chip ou chipe) é um circuito
eletrônico miniaturizado (composto principalmente por dispositivos
semicondutores), que tem sido produzido na superfície de um substrato fino
de material semicondutor.
Os circuitos integrados são usados em quase todos os equipamentos
eletrônicos de hoje, e revolucionaram o mundo da eletrônica.
Um circuito integrado híbrido é um circuito eletrônico miniaturizado
constituído de dispositivos semicondutores individuais, bem como
componentes passivos, ligados a um substrato ou placa de circuito.
Resistores
Resistores são componentes que têm por finalidade oferecer uma
oposição à passagem de corrente elétrica, através de seu material. A essa
oposição damos o nome de resistência elétrica, que possui como unidade
ohm. Causam uma queda de tensão em alguma parte de um circuito elétrico,
porém jamais causam quedas de corrente elétrica. Isso significa que a
corrente elétrica que entra em um terminal do resistor será exatamente a
mesma que sai pelo outro terminal, porém há uma queda de tensão.
Utilizando-se disso, é possível usar os resistores para controlar a corrente
elétrica sobre os componentes desejados.
Um resistor ideal é um componente com uma resistência elétrica que
permanece constante independentemente da tensão ou corrente elétrica que
circular pelo dispositivo.
O valor de um resistor de carbono pode ser facilmente identificado de
acordo com as cores que apresenta na cápsula que envolve o material
resistivo, ou então usando um ohmímetro.
Faixas coloridas indicadas como a, b, c e % de tolerância, são
pintadas no corpo do resistor para indicar o valor nominal de suas resistência
e a porcentagem na qual a resistência pode variar seu valor nominal,
conforme a seguinte equação:

± % da tolerância[1]
VALOR NOMINAL
VALOR DA TOLERÂNCIA
COR DOURADO PRATA SEM CORVA L OR
±5% ±10% ±20%
Diodo
O diodo é um componente elétrico que permite que a corrente
atravesse-o num sentido com muito mais facilidade do que no outro. A
principal função de um diodo semicondutor, em circuitos de corrente
contínua, é controlar o fluxo da corrente, permitindo que a corrente elétrica
circule apenas em um sentido.
Capacitor Eletrolítico
O Capacitor eletrolítico internamente é composto por duas folhas de
alumínio, separadas por uma camada de óxido de alumínio, enroladas e
embebidas em um eletrólito líquido (composto predominantemente de ácido
bórico ou borato de sódio). Por ser composto por folhas enroladas, tem a
forma cilíndrica(lembrando que o cilindro não é perfeito, visto que possui uma
área de Secção menor na parte de baixo em relação a de cima). Suas
COR PRETO MARROM VERMELHO LARANJA AMARELO VERDE AZUL VIOLETA CINZA BRANCOVALOR 0 1 2 3 4 5 6 7 8 9

dimensões variam de acordo com a capacitância e limite de tensão que
suporta.
É um tipo de capacitor que possui polaridade, ou seja, não funciona
corretamente se for invertido. Se a polaridade for invertida dá-se inicio à
destruição da camada de óxido, fazendo o capacitor entrar em curto-circuito.
Nos capacitores eletrolíticos, uma inversão de polaridade é extremamente
perigoso, visto que, a reação interna gera vapores que acabavam por destruir
o capacitor através de uma explosão ou, rompimento da carcaça. Os
capacitores mais modernos, podem inchar e, por isso, raramente explodem
(podendo acontecer somente se a tensão inversa aplicada for elevadíssima).
Regulador de Tensão 7805
Uma boa fonte de alimentação deve gerar uma tensão contínua na
saída e estabilizada, isto significa que mesmo que a tensão de entrada varie
a tensão na saída deverá se manter constante, ou ainda, mesmo que a carga
varie aumentando a corrente do circuito, a tensão na saída deverá se manter
constante! Na realidade estas variações deverão ficar dentro de limites
práticos.
Os reguladores com tensão fixa são mais baratos e apresentam uma
aplicação maior. A serie 78xx e 79xx são os mais comuns destes tipos onde
as letras “xx” devem ser preenchidas com a tensão fixa da saída onde as
mais comuns são: 5V, 9V, 12V, 15V e 24V. Os CI da linha 78xx são para
saídas positivas e os CI da linha 79xx são para saída negativa! O CI
regulador para fontes de 5V é muito usado em fontes para alimentação de
micro-controladores e microprocessadores, já os CI’s 7815 e 7915 ou 7812 e
7912 são muito usados em fontes de alimentação para amplificadores
operacionais que necessitam de uma fonte simétrica. O CI 7824 é muito
usado em fontes de alimentação para o circuito de controle usando CLP na
indústria!
Se a tensão de saída deve ser 5 V a tensão de entrada deve ficar
acima de 8V!

Cristal de Quartzo 4MHz
Um oscilador de cristal é um circuito eletrônico que utiliza a
ressonância de um cristal em vibração de um material piezo eletrônico, para
criar um sinal elétrico com uma frequência bastante precisa. Esta frequência
é comumente usada para medir precisamente o tempo, tais como em relógios
de quartzo, bem como para estabilizar frequências de transmissores de rádio.
O cristal piezoeléctrico mais utilizado é quartzo.[1]
Osciladores de cristais são componentes compostos de dois terminais,
ligados a um cristal piezoeléctrico interno. Esse cristal contrai quando
submetido a tensão elétrica, e o tempo de contração varia conforme a
construção do cristal. Quando a contração chega a um certo ponto, o circuito
libera a tensão e o cristal relaxa, chegando ao ponto de uma nova contração.
Assim, os tempos de contração e relaxação desse ciclo determinam uma
frequência de operação, muito mais estável e controlável que circuitos com
capacitores. Cristais de quartzo são usados sobretudo em micro
controladores.
Motores CC
Todos os motores elétricos valem-se dos princípios do
eletromagnetismo, mediante os quais condutores situados num campo
magnético e atravessados por correntes elétricas sofrem a ação de uma força
mecânica, ou eletroímãs exercem forças de atração ou repulsão sobre outros
materiais magnéticos. Na verdade, um campo magnético pode exercer força
sobre cargas elétricas em movimento. Como uma corrente elétrica é um fluxo
de cargas elétricas em movimento num condutor, conclui-se que todo
condutor percorrido por uma corrente elétrica, imerso num campo magnético,
pode sofrer a ação de uma força. Num motor há dois eletroímãs em que um
impulsiona o outro.
Ponte H L298N
Ponte H é um circuito eletrônico que permite que um micro controlador
controle um motor DC, o micro controlador por si não consegue "dar" a
corrente necessária para o funcionamento do motor, e ainda torna possível
que o motor rode tanto para um sentido quanto o outro. Estes circuitos são

geralmente utilizados em robótica e estão disponíveis em circuitos prontos ou
podem ser construídos por componentes.
Outro melhoramento que pode ser feito à ponte H , seria a colocação de
diodos entre as "chaves", pois quando a corrente não tem onde circular, no
caso de o motor parar, ela volta para a fonte de alimentação economizando
assim o gasto de energia de uma bateria por exemplo.
A PONTE H será feita com o CI L298N, que servirá para controlar os
dois motores, o PIC envia 4 bits que indicam se o motor está ligado ou
desligado, e o sentido de rotação. Para conseguir utilizar apenas 2 bits para
controlar cada motor, o bit que indica que o motor deve ser ligado é enviado
para o CI da ponte H.
PWM (Pulse Width Modulation)
A Modulação por largura de pulso (MLP) - mais conhecida pela sigla em
inglês "PWM" (Pulse-Width Modulation) - de um sinal ou em fontes de
alimentação envolve a modulação de sua razão cíclica (duty cycle) para
transportar qualquer informação sobre um canal de comunicação ou controlar
o valor da alimentação entregue a carga.
A vantagem de se usar PWM para o controle da velocidade do motor é a
possibilidade de se usar o torque máximo do motor, sem a necessidade de
fornecimento contínuo de tensão ao mesmo. O sinal PWM, quando está em
nível lógico alto (tensão máxima), faz com que o motor gire com torque
máximo. Quando em nível lógico baixo (tensão zero), o motor continua a girar
devido à sua inércia até o próximo pulso de tensão máxima.
O PWM não pode ser usado diretamente para acionar o motor. É usado
para controlar uma chave, como um transistor de potência ou uma ponte H,
que emprega a potência necessária ao motor.
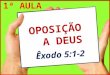
Micro controlador PIC 16F628A
No diagrama de blocos retirado do datasheet da Microchip podem ser
visualizadas as diversas partes que compõem o micro controlador 16F628A.
O mesmo é composto pela ULA (Unidade Lógica Aritmética - do inglês ALU),

que está diretamente ligado ao registrador W (Work). No canto superior
esquerdo temos a memória de programa e saindo desse bloco temos um
barramento de 14 bits (Program Bus 14). Mais ao centro está a memória de
dados (RAM). Ela já possui o barramento de 8 bits (Data Bus 8). Do lado
direito podemos visualizar as portas com todos os seus pinos de I/O. Na
parte inferior se encontram os periféricos, tais como a EEPROM, os Timers, o
comparador interno, o módulo CCP e a porta serial USART. Um pouco mais
ao centro temos o registrador STATUS. Na parte superior temos ainda o
contador de linha de programa (Program Counter) e a pilha de oito níveis
(Stack). Temos ainda os circuitos internos de reset, osciladores, Watchdog
Timer (WDT), Power-up e Brown-out internos.
O PIC 16F628A possui as seguintes características:
• Micro controlador de 8 bits;

• 2 osciladores internos 37 KHz e 4 MHz;
• 16 portas de I/O configuráveis como entrada ou saída;
• 10 interrupções disponíveis;
• Memória de programação Flash de 2048 Bytes;
• Memória EEPRON interna de 128 Bytes;
• Programação com 14 bits e 35 instruções.


Transmissão e Recepção RF (Rádio Frequência)
É responsável pelo envio dos dados entre o computador e o robô.

Os módulos utilizados para transmissão e recepção foram os genéricos
TWS-DS-3 e RWS-375-6 da WENSHING. A antena e a fonte de alimentação
do transmissor devem seguir as recomendações técnicas do fabricante.
Os módulos trabalham na faixa de frequências de: 433,92 MHz.
Receptor RF:
T r a n s m i s s o r R F
O circuito montado do transmissor: