Embed Size (px)
Citation preview
UNIVERSIDADE FEDERAL DE SANTA CATARINA
CURSO DE GRADUAÇÃO EM ENGENHARIA QUÍMICA
Controle de processos da indústria de petróleo e gás utilizando técnicas de
inteligência artificial
Larissa Scherer Severo
Florianópolis, Agosto de 2004
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
1
LARISSA SCHERER SEVERO
MONOGRAFIA DE INICIAÇÃO CIENTÍFICA
CONTROLE DE PROCESSOS DA INDÚSTRIA DE PETRÓLEO E GÁS
UTILIZANDO TÉCNICAS DE INTELIGÊNCIA ARTIFICIAL
Orientador: Prof. Ricardo A. F. Machado, Dr. Sc.
FLORIANÓPOLIS
2004
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
2
CONTROLE DE PROCESSOS DA INDÚSTRIA DE PETRÓLEO E
GÁS UTILIZANDO TÉCNICAS DE INTELIGÊNCIA ARTIFICIAL
Larissa Scherer Severo Aluna de Graduação Ricardo Antônio Francisco Machado Professor, Dr. Sc. Orientador Reinaldo Marcolla Aluno de Pós-graduação Co-orientador
Monografia submetida ao
Programa PRH-ANP/MCT No 34
para avaliação de final de curso.
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
3
SUMÁRIO
LISTA DE FIGURAS..........................................................................................................................................4
RESUMO ...............................................................................................................................................................6
INTRODUÇÃO .....................................................................................................................................................8
1.2 – CONTROLE DE PROCESSOS NA INDÚSTRIA PETROQUÍMICA ............................................................11
1.3 – APRESENTAÇÃO DO TRABALHO ..........................................................................................................13
REVISÃO BIBLIOGRÁFICA..........................................................................................................................14
2.1 – INTRODUÇÃO ..........................................................................................................................................14
2.2 – REDES NEURAIS ARTIFICIAIS ...............................................................................................................14
2.2.1 - Benefícios das redes neurais ..................................................................................................16
2.2.2 - Cérebro Humano.........................................................................................................................20
2.2.3 - Modelos de um Neurônio ..........................................................................................................22
2.2.4 - Tipos de Função de Ativação ..................................................................................................26
2.2.5 - Arquitetura da Rede ..................................................................................................................29
2.2.6 - Inteligência Artificial e Redes Neurais..................................................................................34
2.2.7 - O “Aprendizado” da Rede ........................................................................................................34
2.2.8 - Algoritmo de Retropropagação de Erro.................................................................................37
2.3 - MODELAGEM DE PROCESSOS QUÍMICOS UTILIZANDO CONHECIMENTO PRÉVIO DE REDES
NEURAIS............................................................................................................................................................38
2.4 – CONSIDERAÇÕES FINAIS .......................................................................................................................41
METODOLOGIA................................................................................................................................................42
3.1 - UNIDADES EXPERIMENTAIS ..................................................................................................................42
3.2 - PROCEDIMENTO EXPERIMENTAL ...........................................................................................................46
RESULTADOS E DISCUSSÕES....................................................................................................................53
4.1 – RESULTADOS DO TREINAMENTO DA REDE NEURAL ...........................................................................53
4.2 – RESULTADOS DO CONTROLE EM MALHA FECHADA..............................................................................56
CONCLUSÕES .....................................................................................................................................................61
REFERÊNCIAS BIBLIOGRÁFICAS..............................................................................................................63
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
4
LISTA DE FIGURAS
FIGURA 1.01: ILUSTRAÇÃO DAS GERAÇÕES EXISTENTES NA INDÚSTRIA PETROQUÍMICA. .............................9
FIGURA 1.02: PROCESSAMENTO MENSAL DE PETRÓLEO NAS REFINARIAS DO BRASIL................................10
FIGURA 2.01: REPRESENTAÇÃO EM DIAGRAMA EM BLOCOS DO SISTEMA NERVOSO................................20
FIGURA 2.02: ORGANIZAÇÃO ESTRUTURAL DOS NÍVEIS DO CÉREBRO. ..........................................................22
FIGURA 2.03: MODELO NÃO-LINEAR DE UM NEURÔNIO. .................................................................................23
FIGURA 2.04: TRANSFORMAÇÃO AFIM PRODUZIDA PELA PRESENÇA DE UM BIAS. ........................................25
FIGURA 2.05: OUTRO MODELO NÃO-LINEAR DE UM NEURÔNIO. ....................................................................26
FIGURA 2.06: FUNÇÃO DE TRANSFERÊNCIA SIGMÓIDE. ..................................................................................27
FIGURA 2.07: FUNÇÃO DE TRANSFERÊNCIA TANGENTE HIPERBÓLICA. ..........................................................28
FIGURA 2.08: FUNÇÃO DE TRANSFERÊNCIA GAUSSIANA.................................................................................29
FIGURA 2.09: REDE ALIMENTADA ADIANTE OU ACÍCLICA COM UMA ÚNICA CAMADA DE NEURÔNIO. ..........31
FIGURA 2.10: REDE ALIMENTADA ADIANTE OU ACÍCLICA TOTALMENTE CONECTADA COM UMA CAMADA
OCULTA E UMA CAMADA DE SAÍDA. ...........................................................................................................32
FIGURA 2.11: REDE RECORRENTE SEM LAÇOS DE AUTO-REALIMENTAÇÃO E SEM NEURÔNIOS OCULTOS.33
FIGURA 2.12: PREVISÃO DA TEMPERATURA APÓS UM INTERVALO DE TEMPO ΔT. ........................................35
FIGURA 2.13: FLUXO DE INFORMAÇÕES PARA O AJUSTE DOS PESOS APÓS CADA PADRÃO. ........................36
FIGURA 3.01: ESQUEMA DA UNIDADE PILOTO DE POLIMERIZAÇÃO [MAZZUCCO, 2003].............................43
FIGURA 3.02: DETALHES DO REATOR DE POLIMERIZAÇÃO.[MAZZUCCO, 2003]. .........................................44
FIGURA 3.03 : TELA PRINCIPAL DO SOFTWARE DE AQUISIÇÃO DE DADOS E CONTROLE (MALHA FECHADA).
......................................................................................................................................................................46
FIGURA 3.04: FLUXOGRAMA DO PROCEDIMENTO EXPERIMENTAL..................................................................47
FIGURA 3.05: PERTURBAÇÕES APLICADAS NAS VÁLVULAS DE CONTROLE PARA O LEVANTAMENTO DE
DADOS PARA ETAPA DE TREINAMENTO. .....................................................................................................48
FIGURA 3.06: RESPOSTA DA TEMPERATURA DO REATOR PARA AS PERTURBAÇÕES APLICADAS NA FIGURA
3.05. ............................................................................................................................................................48
FIGURA 3.07: PERTURBAÇÕES APLICADAS NAS VÁLVULAS DE CONTROLE PARA O LEVANTAMENTO DE
DADOS PARA ETAPA DE VALIDAÇÃO. ..........................................................................................................49
FIGURA 3.08: RESPOSTA DA TEMPERATURA DO REATOR PARA AS PERTURBAÇÕES APLICADAS NA FIGURA
3.07. ............................................................................................................................................................50
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
5
FIGURA 3.09: MENU GERADO PELO PROGRAMA MATLAB PARA CONFIGURAÇÃO DA REDE NEURAL. ........51
FIGURA 4.01: RESULTADO DO TREINAMENTO PARA 6 NEURÔNIOS NA CAMADA ESCONDIDA E 50.000
ÉPOCAS.........................................................................................................................................................53
FIGURA 4.02/4.03: RESULTADO DO TREINAMENTO PARA 6 NEURÔNIOS NA CAMADA ESCONDIDA
E 100.000 ÉPOCAS....................................................................................................................................54
FIGURA 4.04: RESULTADO DA VALIDAÇÃO DA REDE.........................................................................................55
FIGURA 4.05: TOPOLOGIA DA REDE....................................................................................................................56
FIGURA 4.06: SOFWARE EM OPERAÇÃO. MUDANÇA DE SETPOINT DE 30 PARA 50OC. ..................................57
FIGURA 4.07: MUDANÇA DE SETPOINT DE 50 PARA 70OC. ..............................................................................58
FIGURA 4.08: RESPOSTA DAS VARIÁVEIS CONTROLADA E MANIPULADA, MANTIDO
UM SETPOINT DE 70OC.................................................................................................................................59
FIGURA 4.09: PERTURBAÇÃO DE CARGA EM DESTAQUE. .................................................................................60
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
6
RESUMO
A maioria dos processos químicos é caracterizada por não linearidades,
tempo morto muito elevado, processo restritivos e condições de operação em
constante mudança. Unidades petroquímicas estão repletas destes
processos: colunas de destilação em refinarias, reatores, torres de extração e
absorção, etc. O preço do petróleo está associado ao valor que se pode
agregar a ele sendo função da densidade e ponto de ebulição. Processos sob
rigoroso controle, mantendo os produtos dentro das especificações
desejadas, é de extremo interesse para esse segmento.
Controladores clássicos a parâmetros constantes, nestes casos,
apresentam desempenho limitado e, para transpor essas dificuldades a
engenharia de processos tem se beneficiado de estratégias de controle
avançadas, como, por exemplo, controle preditivo baseado em modelo (MPC).
Sistemas inteligentes são extremamente atraentes para problemas complexos
de controle, pois esses são capazes de aproximar as relações dinâmicas entre
as variáveis de causa e efeito. Estratégias utilizando técnicas combinadas de
inteligência artificial são avanços que ainda possuem grande potencial de
exploração.
Este trabalho consiste na implementação e avaliação de desempenho
de uma estratégia de controle baseado no conhecimento prévio do modelo,
para isso utiliza-se uma rede neural treinada como modelo empírico do
processo. Este documento reflete apenas uma parcela do trabalho
desenvolvido no Programa PRH34 e consiste do cumprimento da última
relativa a formação de Engenheiro Químico especialista em Petróleo e Gás.
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
7
Ensaios experimentais foram conduzidos em escala piloto de
laboratório, objetivando controle de temperatura de um reator. O modelo
empírico foi representado por uma rede neural feedforward, com treinamento
off-line. Os resultados demonstram que a estratégia apresenta desempenho
satisfatório para mudanças entre set points e perturbações de carga,
mantendo a variável controlada na referência desejada.
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
8
INTRODUÇÃO
1.1 - A indústria petroquímica: conceituação
Petróleo e gás natural são normalmente percebidos pelo grande
público como sendo essencialmente fontes primárias de combustíveis, seja
para uso em meios de transporte na forma de gasolina, diesel ou mesmo gás,
seja para geração de energia para uso industrial por combustão em fornos e
caldeiras. Todavia, nem todos têm presente que é também do processamento
inicial desses mesmos recursos naturais que provêm às matérias-primas
básicas de um dos pilares do sistema industrial moderno, a indústria
petroquímica. Partindo geralmente ou da nafta, que é uma fração líquida do
refino do petróleo, ou do próprio gás natural tratado, os sofisticados
processos petroquímicos são capazes de quebrar, recombinar e transformar
as moléculas originais dos hidrocarbonetos presentes no petróleo ou no gás,
gerando, em grande escala, uma diversidade de produtos, os quais, por sua
vez, irão constituir a base química dos mais diferentes segmentos da
indústria em geral. Atualmente, é possível identificar produtos de origem
petroquímica na quase totalidade dos itens industriais consumidos pela
população tais como embalagens e utilidades domésticas de plástico, tecidos,
calçados, alimentos, brinquedos, materiais de limpeza, pneus, tintas, eletro-
eletrônicos, materiais descartáveis e muitos outros.
Tipicamente, podem ser distinguidos três estágios, ou gerações,
industriais na cadeia da atividade petroquímica, como pode-se observar na
Figura 1.01: (1) indústrias de 1a geração, que fornecem os produtos
petroquímicos básicos, tais como eteno, propeno, butadieno, etc; (2)
indústrias de 2a geração, que transformam os petroquímicos básicos nos
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
9
chamados petroquímicos finais, como polietileno (PE), polipropileno (PP),
polivinilcloreto (PVC), poliésteres, óxido de etileno etc.; (3) indústrias de 3a
geração, onde produtos finais são quimicamente modificados ou
conformados em produtos de consumo. A indústria do plástico é o setor que
movimenta a maior quantidade de produtos fabricados com materiais
petroquímicos.
FIGURA 1.01: ILUSTRAÇÃO DAS GERAÇÕES EXISTENTES NA INDÚSTRIA PETROQUÍMICA.
Em geral, a competitividade da indústria petroquímica está
criticamente associada a fatores como grau de verticalização empresarial,
grandes economias de escala, disponibilidade e garantia de fornecimento de
matéria-prima, altos investimentos em tecnologia e logística de distribuição
de produtos. Tais fatores fazem com que o segmento petroquímico seja um
campo onde jogam apenas empresas de grande porte, as mais importantes
com elevado grau de internacionalização das atividades.
A manutenção da competitividade exige que as modernas indústrias
petroquímicas estejam em freqüente modernização para corresponder às
exigências mercadológicas de produção com menor custo e elevada
qualidade.
Hoje, no Brasil, temos três pólos petroquímicos:
- O Pólo Petroquímico de São Paulo está localizado nas cidades de Santo
André e Cubatão, no estado de São Paulo. A Petroquímica União (São Paulo)
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
10
iniciou suas operações em 1972, tem a capacidade de produção instalada de
500 mil toneladas por ano de eteno e tem quarenta indústrias de segunda
geração.
- O Pólo Petroquímico de Camaçari está localizado em Camaçari, na
Bahia. A COPENE (Companhia Petroquímica do Nordeste) iniciou suas
operações em 1978, tem a capacidade de produção instalada de 1,2 milhão
de toneladas por ano de eteno e tem 423 indústrias de segunda geração.
- O Pólo Petroquímico do Sul está localizado na cidade de Triunfo, no
Rio Grande do Sul. A COPESUL (Companhia Petroquímica do Sul) iniciou
suas operações em 1982, tem a capacidade de produção instalada de 1,135
milhão de toneladas por ano de eteno e tem oito indústrias de segunda
geração.
01.000.0002.000.0003.000.0004.000.0005.000.0006.000.0007.000.0008.000.0009.000.000
10.000.000
Jane
iro
Feverei
roMarç
oAbri
lMaio
Junh
oJu
lho
Agosto
Setembro
Outubro
Novem
bro
Dezem
bro
Ano
m3
2000 2001 2002 2003 2004
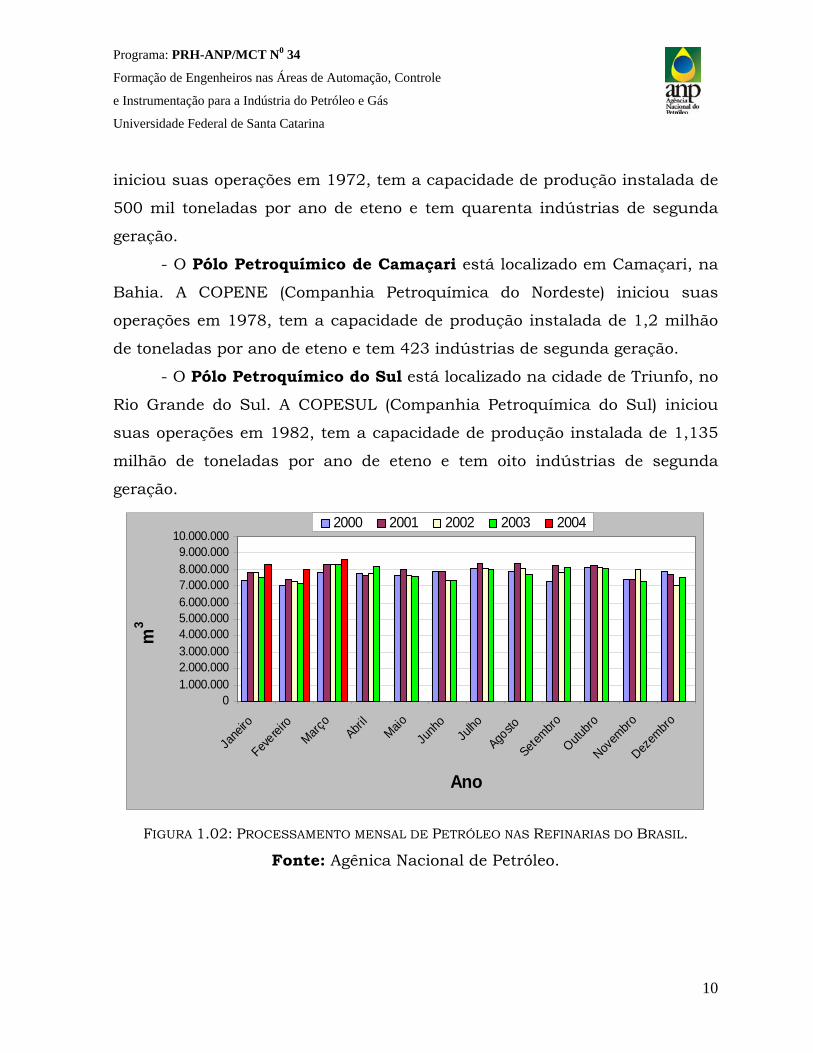
FIGURA 1.02: PROCESSAMENTO MENSAL DE PETRÓLEO NAS REFINARIAS DO BRASIL.
Fonte: Agênica Nacional de Petróleo.
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
11
Na Figura 1.02 consta dados da Agência Nacional de Petróleo referente
ao processamento de petróleo nas Refinarias Brasileiras entre o período de
janeiro de 2000 a março de 2004.
1.2 – Controle de Processos na Indústria Petroquímica
O preço do petróleo está associado ao valor que pode agregar a ele
sendo função da densidade e ponto de ebulição. Processos sob rigoroso
controle, mantendo os produtos dentro das especificações desejadas, são de
extremo interesse para esse segmento.
Unidades petroquímicas abrangem processos físico-químicos de
transformação que apresentam fortes não-linearidades, além de múltiplos
estados de equilíbrio. Ainda, para processos contínuos, alguns destes
estados de equilíbrio são instáveis em malha aberta. Mesmo assim, grande
parte dos estudos realizados em controle de processos de aplicações
industriais são tipicamente feitos por controladores lineares baseados em
modelos linearizados, ou ainda em controladores clássicos, como o PID.
Contudo, sabe-se que teorias de controle linear são válidas somente para as
vizinhanças de um ponto operacional e, para sistemas com fortes não-
linearidades, como é o caso da maioria dos processos químicos, a fronteira
de aplicação do modelo linear em torno de um ponto torna-se muito
pequena, ou seja, métodos baseados em controle linear podem não
apresentar bons resultados (CANCELIER et al., 2004).
O sistema de controle baseado em modelos tem demonstrado ser
bastante eficiente em processos químicos, especialmente em processos com
fortes interações entre entrada e saída, tempo morto elevados, além de
restrições físicas em suas variáveis (GARCÍA et al., 1989). Por exemplo,
reatores de polimerização onde a temperatura possui grande influência sobre
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
12
a cinética de reação e distribuição dos pesos moleculares do polímero, ou
seja, possui efeito direto sobre suas propriedades, portanto, esta é uma
variável que se deseja controlar.
Para o propósito da aplicação de estratégias de controle, os modelos
matemáticos de processos podem ser apresentados em diferentes formatos,
contanto que possam se utilizados para prover previsões úteis, significantes
e fidedignas do comportamento do processo. É bem estabelecido já que
modelos fenomenológicos normalmente fornecem uma descrição mais precisa
do processo, especialmente para extrapolações e que modelos empíricos são
de mais fácil obtenção e manipulação durante aplicações on line em tempo
real, principalmente quando a obtenção de dados experimentais é facilitada
(VIEIRA et al., 2003). Por esta razão, algumas aplicações exigem uma
otimização/adaptação do modelo desenvolvido e eventualmente o uso de
estruturas híbridas, que levam em consideração o conhecimento empírico
mais o conhecimento fenomenológico, podem sem consideradas.
De forma a superar as dificuldades no desenvolvimento de modelos
mecanísticos, modelos empíricos baseados em redes neurais estão sendo
utilizados, tanto para fins de modelagem e otimização de processos, quanto
para a construção de estratégias de controle (CANCELIER et al., 2004).
Principalmente quando o sistema tratado possui fortes não linearidades, as
redes neurais tem encontrado grande aplicação para sua identificação e
modelagem. O único inconveniente para a aplicação de redes neurais é a
necessidade de grande número de dados experimentais para o seu
treinamento. Quando se possui limitado número de pontos experimentais,
geralmente o treinamento convencional tende levar ao sobretreinamento, o
que faz com que a rede tenha pouca capacidade de.
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
13
1.3 – Apresentação do trabalho
Conforme supracitado, a necessidade de sistemas de controle
complexos e a grande interação existente entre os processos encontrados em
uma refinaria ou unidades petroquímicas, motiva o desenvolvimento do
presente trabalho.
Para facilidade de apresentação, este documento está dividido em
introdução, uma revisão bibliográfica cuja finalidade é apresentar as
propostas de aplicação de estratégias de controle baseados em modelos
neurais, a metodologia da análise experimental, os resultados encontrados e
as conclusões pertinentes.
A metodologia foi estabelecida de modo a simular um operação de uma
estratégia de controle baseado em modelo, representado neste trabalho por
um rede neural, em um sistema de aquecimento/resfriamento de um tanque
típicos da indústria petroquímica: um reator operando sob regime de
batelada.
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
14
REVISÃO BIBLIOGRÁFICA
2.1 – Introdução
Neste capítulo descreve-se uma revisão sobre redes neurais,
abrangendo conceituação, propriedades e aplicações industriais. Ainda,
sobre algoritmos de treinamento. Objetiva-se detalhar a proposta de controle
a ser trabalhada nos capítulos subseqüentes e argumentar seu pretexto.
2.2 – Redes Neurais Artificiais
O trabalho em redes neurais artificiais, usualmente denominadas
“redes neurais”, tem sido motivado desde o começo pelo reconhecimento de
que o cérebro humano processa informações de uma forma inteiramente
diferente do computador digital convencional. O cérebro é um computador
(sistema de processamento de informação) altamente complexo, não-linear e
paralelo (HAYKIN,1999). Ele tem a capacidade de organizar seus
constituintes estruturais, conhecidos como neurônios, de forma a realizar
certos processamentos (p. ex., reconhecimento de padrões, percepção e
controle motor) muito mais rapidamente que o mais rápido computador
digital hoje existente.
Um neurônio em “desenvolvimento” é sinônimo de um cérebro plástico:
a plasticidade permite que o sistema nervoso em desenvolvimento se adapte
ao meio ambiente. Assim como a plasticidade parece ser essencial para o
funcionamento dos neurônios como unidades de processamento de
informação do cérebro humano, também ela o é com relação às redes neurais
construídas com neurônios artificiais. Na sua forma mais geral uma rede

Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
15
neural é uma máquina que é projetada para modelar a maneira como o
cérebro realiza uma tarefa particular ou função de interesse.
HAYKIN, 1999, fornece a seguinte definição de rede neural:
“Uma rede neural é um processador maciça e paralelamente distribuído
constituído de unidades de processamento simples, que têm a propensão
natural para armazenar conhecimento experimental e torná-lo disponível para
o uso.”
A Rede neural se assemelha ao cérebro em dois aspectos:
i. O conhecimento é adquirido pela rede a partir de seu ambiente
através de um processo de aprendizagem.
ii. Forças de conexão entre neurônios, conhecidas como pesos
sinápticos, são utilizados para armazenar o conhecimento adquirido.
O procedimento utilizado para realizar o processo de aprendizagem é
chamado de algoritmo de aprendizagem, cuja função é modificar os pesos
sinápticos da rede de uma forma ordenada para alcançar um objetivo de
projeto desejado. Geralmente objetiva a minimização de uma função de erro
quadrático.
A modificação dos pesos sinápticos é o método tradicional para o
projeto de redes neurais. Esta abordagem é bastante próxima da teoria dos
filtros adaptativos lineares, que já está bem estabelecida e foi aplicada com
sucesso em diversas áreas (WIDROW e STEARNS, 1985; HAYKIN,1996).
Entretanto, é possível também para uma rede neural modificar sua própria
topologia, o que é motivado pelo fato de os neurônios no cérebro humano
poderem morrer e que novas conexões sinápticas possam crescer.
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
16
2.2.1 - Benefícios das redes neurais
É evidente que uma rede neural extrai seu poder computacional
através, primeiro, de sua estrutura maciçamente paralelamente distribuída
e, segundo, de sua habilidade de aprender e, portanto de generalizar. A
generalização se refere ao fato de a rede neural produzir saídas adequadas
para entradas que não estavam presentes durante o treinamento
(aprendizagem). Estas duas capacidades de processamento de informação
tornam possível para as redes neurais resolver problemas complexos que são
atualmente intratáveis. Na prática, contudo, as redes neurais não podem
fornecer uma solução trabalhando individualmente. Em vez disso, elas
precisam ser integradas em uma abordagem consistente de engenharia de
sistemas. Especificamente, um problema complexo de interesse é decomposto
em um número de tarefas relativamente simples, e atribui-se a redes neurais
um subconjunto de tarefas que coincidem com as suas capacidades
inerentes.
O uso de redes neurais oferece as seguintes propriedades úteis:
1. Não-linearidade. Um neurônio artificial pode ser linear ou não-linear.
Uma rede neural, constituída por conexões de neurônios não-lineares é ela
mesma não-linear. Além disso, a não linearidade é de um tipo especial, no
sentido de ela ser distribuída por toda a rede. A não-linearidade é uma
propriedade muito importante, particularmente se o mecanismo físico
responsável pela geração do sinal de entrada for inerentemente não-linear;
2. Mapeamento de entrada-saída. Apresenta-se para a rede um exemplo
escolhido ao acaso do conjunto, e os pesos sinápticos (parâmetros livres) da
rede são modificados para minimizar a diferença entre a resposta desejada e
a resposta real da rede, produzida pelo sinal de entrada, de acordo com um
critério estatístico apropriado. O treinamento da rede é repetido para muitos
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
17
exemplos do conjunto até que a rede alcance um estado estável onde não
haja mais modificações significativas nos pesos sinápticos.(O treinamento e
aprendizado da rede é tratado seção 2.2.7);
3. Adaptabilidade. As redes neurais têm uma capacidade inata de adaptar
sues pesos sinápticos a modificação do meio ambiente. Em particular, uma
rede neural treinada para operar em um ambiente específico pode ser
facilmente retreinada para lidar com pequenas modificações nas condições
operativas do ambiente. Além disso, quando está operando em um ambiente
não-estacionário (i.e., onde as estatísticas mudam com o tempo), uma rede
neural pode ser projetada para modificar seus pesos sinápticos em tempo
real. A arquitetura natural de uma rede neural para classificação de padrões,
processamento de sinais e aplicações de controle, aliada à capacidade de
adaptação da rede, a torna uma ferramenta muito útil para classificação
adaptativa de padrões, processamento adaptativo de sinais e controle
adaptativo. Como regra geral, pode-se dizer que quanto mais adaptativo se
fizer um sistema, assegurando-se de que o sistema se mantenha estável,
mais robusto tenderá a ser o seu desempenho quando o sistema for exigido a
operar em um ambiente não-estacionário. Contudo, deve ser enfatizado, que
adaptabilidade nem sempre resulta em robustez; na verdade pode resultar
no contrário. Um sistema adaptativo com constantes de tempo pequenas, por
exemplo, pode se modificar rapidamente e assim tender a responder a
perturbações não legítimas, causando uma drástica degradação no
desempenho do sistema. Para aproveitar todos os benefícios da
adaptabilidade, as constantes de tempo principais do sistema devem ser
grandes o suficiente para que o sistema ignore perturbações espúrias, mas
ainda assim serem suficientemente pequenas para responder a mudanças
significativas no ambiente;
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
18
4. Resposta a evidências. No contexto de classificação de padrões, uma
rede neural pode ser projetada para fornecer informação não somente sobre
qual padrão particular selecionar, mas também sobre a confiança ou crença
na decisão tomada. Esta última informação pode ser utilizada para rejeitar
padrões ambíguos, caso eles estejam presentes, e com isso melhorar o
desempenho de classificação da rede;
5. Informação contextual. O conhecimento é representado pela própria
estrutura e estado de ativação de uma rede neural. Cada neurônio de rede é
potencialmente afetado pela atividade de todos os outros neurônios da rede.
Conseqüentemente, a informação contextual é tratada naturalmente pela
rede neural;
6. Tolerância a falhas. Uma rede neural, implementada na forma física
(em hardware), tem o potencial de ser inerentemente tolerante a falhas, ou
capaz de realizar computação robusta, no sentido de que seu desempenho se
degrada suavemente sob condições de operação adversas. Se um neurônio
ou suas conexões é danificado, por exemplo, a recuperação de um padrão
armazenado é prejudicada em qualidade. Contudo, devido à natureza
distribuída da informação armazenada na rede, o dano deve ser extenso para
que a resposta global da rede seja degradada seriamente. Assim, a princípio,
uma rede neural exibe uma degradação suave do desempenho em vez de
apresentar uma falha catastrófica;
7. Implementação em VLSI. A natureza maciçamente paralela de uma
rede neural a faz ser potencialmente rápida na computação de certas tarefas.
Esta mesma característica torna uma rede neural adequada para
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
19
implementação utilizando tecnologia de integração em escala muito ampla.
Uma virtude benéfica particular da tecnologia VLSI (very-large-scale-
integration) é que ela fornece um meio de captar comportamentos realmente
complexos de uma forma altamente hierárquica;
8. Uniformidade de análise e projeto. Basicamente, as redes neurais
desfrutam de universalidade de como processadores de informação. Dizemos
isso no sentido de que a mesma notação é utilizada em todos os domínios
envolvendo a aplicação de redes neurais. Esta característica se manifesta de
diferentes modos:
Os neurônios de uma forma ou de outra representam um ingrediente
comum a todas as redes neurais;
Esta uniformidade torna possível compartilhar teorias e algoritmos de
aprendizagem em aplicações diferentes de redes neurais;
Redes modulares podem ser construídas através de uma integração
homogênea de módulos;
9. Analogia Neurobiológica. O projeto de uma rede neural é motivado pela
analogia com o cérebro, que é uma prova viva de que o processamento
paralelo tolerante a falhas é não somente possível fisicamente, mas também
rápido e poderoso. Os neurobiólogos olham para as redes neurais (artificiais)
como uma ferramenta de pesquisa para a interpretação de fenômenos
neurobiológicos. Por outro lado, os engenheiros olham para a neurobiologia
procurando novas idéias para resolver problemas mais complexos do que
aqueles baseados em técnicas convencionais de projeto por conexões fixas.
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
20
2.2.2 - Cérebro Humano
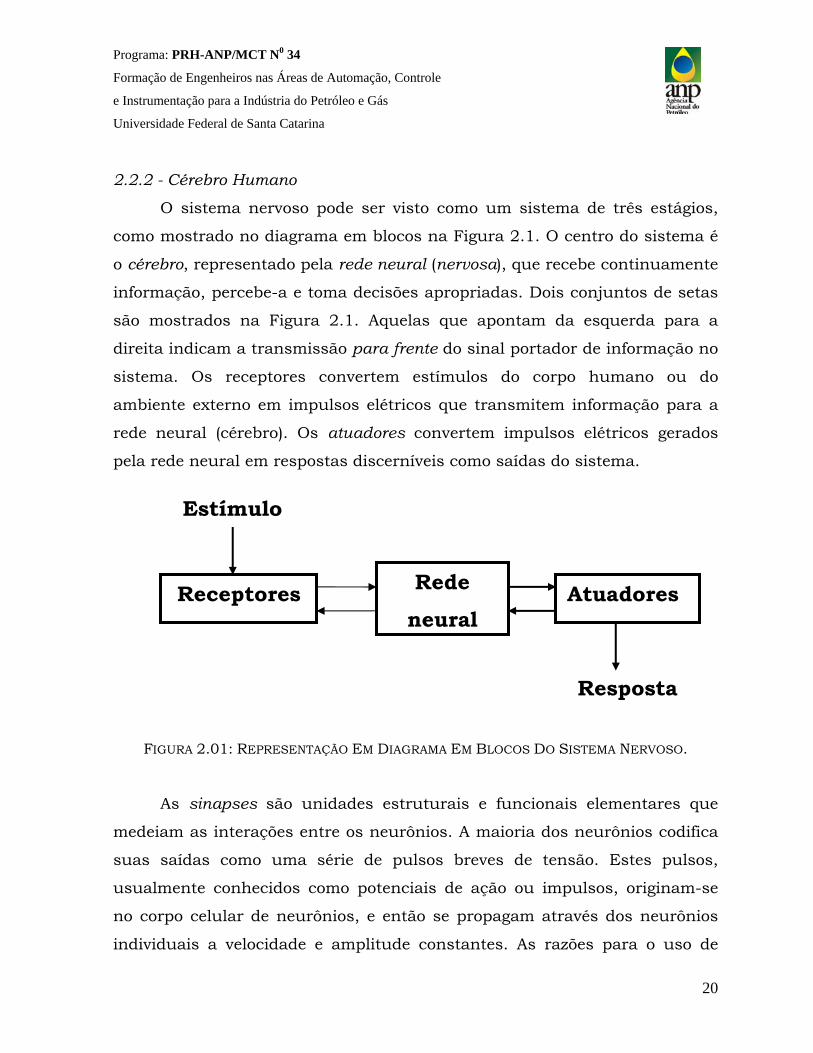
O sistema nervoso pode ser visto como um sistema de três estágios,
como mostrado no diagrama em blocos na Figura 2.1. O centro do sistema é
o cérebro, representado pela rede neural (nervosa), que recebe continuamente
informação, percebe-a e toma decisões apropriadas. Dois conjuntos de setas
são mostrados na Figura 2.1. Aquelas que apontam da esquerda para a
direita indicam a transmissão para frente do sinal portador de informação no
sistema. Os receptores convertem estímulos do corpo humano ou do
ambiente externo em impulsos elétricos que transmitem informação para a
rede neural (cérebro). Os atuadores convertem impulsos elétricos gerados
pela rede neural em respostas discerníveis como saídas do sistema.
FIGURA 2.01: REPRESENTAÇÃO EM DIAGRAMA EM BLOCOS DO SISTEMA NERVOSO.
As sinapses são unidades estruturais e funcionais elementares que
medeiam as interações entre os neurônios. A maioria dos neurônios codifica
suas saídas como uma série de pulsos breves de tensão. Estes pulsos,
usualmente conhecidos como potenciais de ação ou impulsos, originam-se
no corpo celular de neurônios, e então se propagam através dos neurônios
individuais a velocidade e amplitude constantes. As razões para o uso de
Estímulo
Receptores Rede neural
Atuadores
Resposta
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
21
potenciais de ação para a comunicação entre neurônios se baseiam na física
dos axônios. O axônio de um neurônio é muito longo e fino e é caracterizado
por uma alta resistência elétrica e uma capacitância muito grande. Estes
dois elementos estão distribuídos ao longo do axônio. O axônio pode assim
ser modelado como uma linha de transmissão RC, daí o uso comum da
“equação de linha” como termologia para descrever a propagação do sinal ao
longo do axônio.
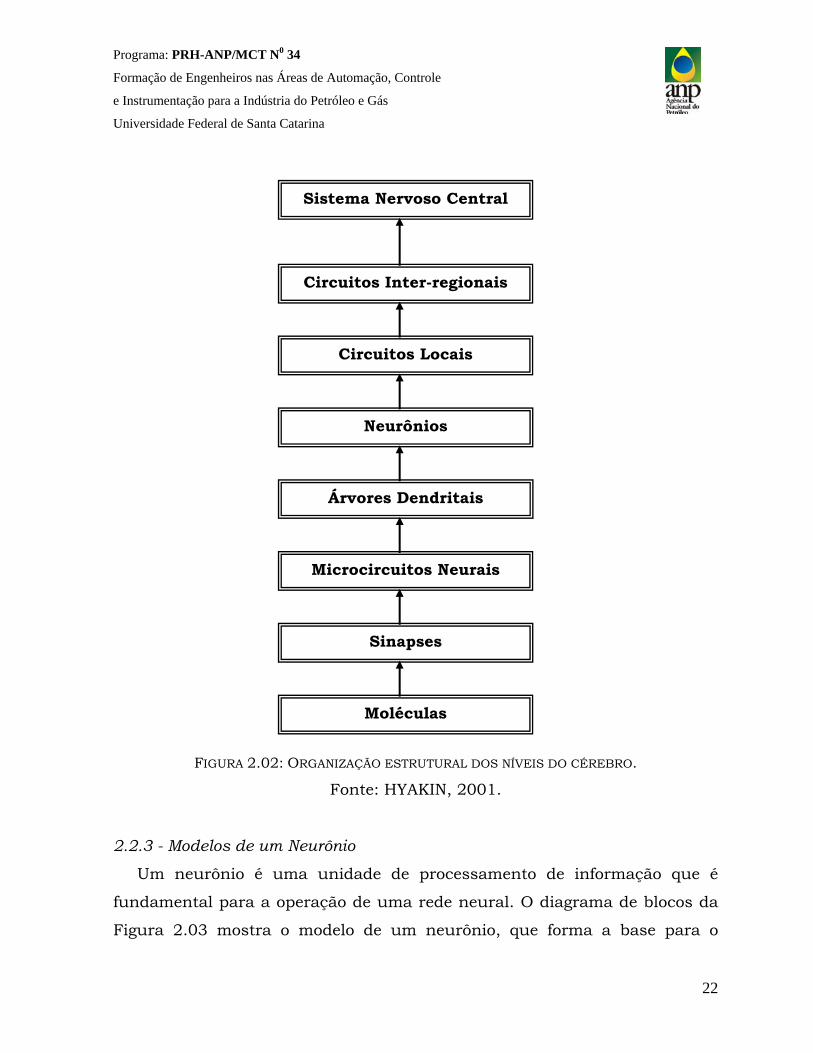
No cérebro há organizações anatômicas tanto em pequena escala e em
grande escala, e funções diferentes ocorrem nos níveis mais baixos e nos
mais altos. A Figura 2.02 mostra uma hierarquia de níveis entrelaçados de
organização, emergente do extenso trabalho sobre a análise de regiões
localizadas no cérebro. As sinapses representam o nível mais fundamental,
dependente de moléculas e íons para sua ação. Nos níveis seguintes, temos
os microcircuito neural se refere a um agrupamento de sinapses organizadas
em padrões de conectividade para produzir uma operação funcional de
interesse.
É importante reconhecer que os níveis estruturais de organização
descritos aqui são uma característica única do cérebro. Eles não são
encontrados em lugar algum em um computador digital, e não estamos
próximos de recriá-los com redes neurais artificiais. Apesar disso, HAYKIN,
2001, diz estarmos avançando gradualmente no caminho de uma hierarquia
de níveis computacionais similar àquela descrita na Figura 2.02. Os
neurônios artificiais que utilizamos para construir nossas redes neurais são
realmente primitivos em comparação com aqueles encontrados no cérebro.
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
22
FIGURA 2.02: ORGANIZAÇÃO ESTRUTURAL DOS NÍVEIS DO CÉREBRO.
Fonte: HYAKIN, 2001.
2.2.3 - Modelos de um Neurônio
Um neurônio é uma unidade de processamento de informação que é
fundamental para a operação de uma rede neural. O diagrama de blocos da
Figura 2.03 mostra o modelo de um neurônio, que forma a base para o
Sistema Nervoso Central
Circuitos Inter-regionais
Circuitos Locais
Neurônios
Árvores Dendritais
Microcircuitos Neurais
Sinapses
Moléculas
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
23
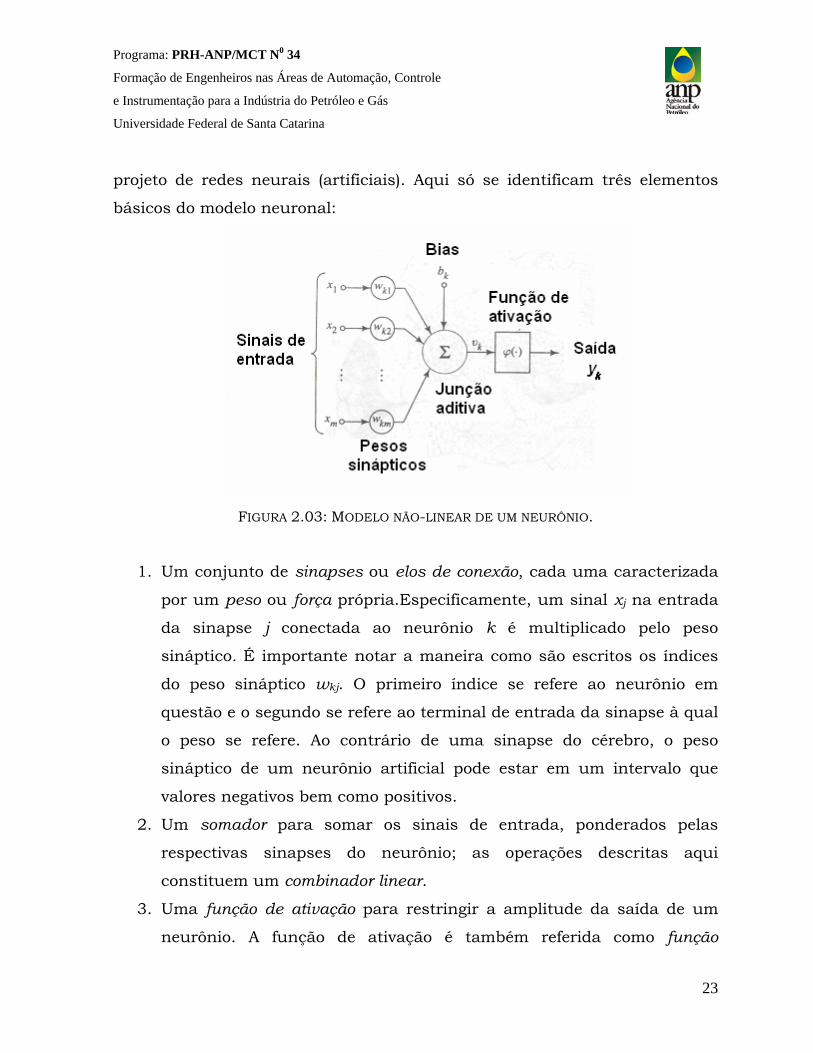
projeto de redes neurais (artificiais). Aqui só se identificam três elementos
básicos do modelo neuronal:
FIGURA 2.03: MODELO NÃO-LINEAR DE UM NEURÔNIO.
1. Um conjunto de sinapses ou elos de conexão, cada uma caracterizada
por um peso ou força própria.Especificamente, um sinal xj na entrada
da sinapse j conectada ao neurônio k é multiplicado pelo peso
sináptico. É importante notar a maneira como são escritos os índices
do peso sináptico wkj. O primeiro índice se refere ao neurônio em
questão e o segundo se refere ao terminal de entrada da sinapse à qual
o peso se refere. Ao contrário de uma sinapse do cérebro, o peso
sináptico de um neurônio artificial pode estar em um intervalo que
valores negativos bem como positivos.
2. Um somador para somar os sinais de entrada, ponderados pelas
respectivas sinapses do neurônio; as operações descritas aqui
constituem um combinador linear.
3. Uma função de ativação para restringir a amplitude da saída de um
neurônio. A função de ativação é também referida como função
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
24
restritiva já que restringe (limita) o intervalo permissível de amplitude
do sinal de saída a um valor finito (Seção 2.2.4 detalhada melhor as
funções de ativação mais utilizadas).
Tipicamente, o intervalo normalizado da amplitude da saída de um
neurônio é escrito como o intervalo unitário fechado [0,1] ou
alternativamente [-1,1].
O modelo neuronal da Figura 2.3 inclui também um bias aplicado
externamente, representado por bk. O bias bk tem o efeito de aumentar ou
diminuir a entrada líquida da função de ativação, dependendo se ele é
positivo ou negativo, respectivamente.
Em termos matemáticos, podemos descrever um neurônio k escrevendo o
seguinte par de equações temos (2.1 e 2.2):
∑=
=m
jjkjk xwu
1
(2.1)
)( kkk buy += ϕ (2.2)
onde: x1,x2,...xm são os sinais de entrada; wk1,wk2,...wkm são os pesos
sinápticos do neurônio k; uk é a saída do combinador linear devido aos sinais
de entrada; bk é o bias; φ é a função de ativação; e yk é o sinal de saída do
neurônio. O uso de bias bk tem o efeito de aplicar uma transformação afim à
saída uk do computador linear no modelo da Figura 2.3 como mostrado pela
Equação (2.3):
kkk buv += (2.3)
Em particular, dependendo se o bias bk é positivo ou negativo, a
relação entre o campo local induzido ou potencial de ativação, vk, do neurônio
k e a saída do combinador linear uk é modificada na forma ilustrada da

Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
25
Figura 2.4. Note que como resultado desta transformação afim, o gráfico de
vk em função de uk não passa mais pela origem.
FIGURA 2.04: TRANSFORMAÇÃO AFIM PRODUZIDA PELA PRESENÇA DE UM BIAS.
Note que vk = bk em uk = 0.
O bias bk é um parâmetro externo do neurônio artificial k. Podemos
considerar a sua presença como na Equação (2.2). Equivalentemente,
podemos formular a combinação das Equações (2.1) até (2.3) como segue:
∑=
=m
jjkjk xwv
0 (2.4)
)( kk vy ϕ= (2.5)
Na Equação. (2.4) adiciona-se uma nova sinapse. A sua entrada é
escrita pela Equação (2.6), enquanto seu peso, pela Equação (2.7).
10 +=x (2.6)
kk bw =0 (2.7)
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
26
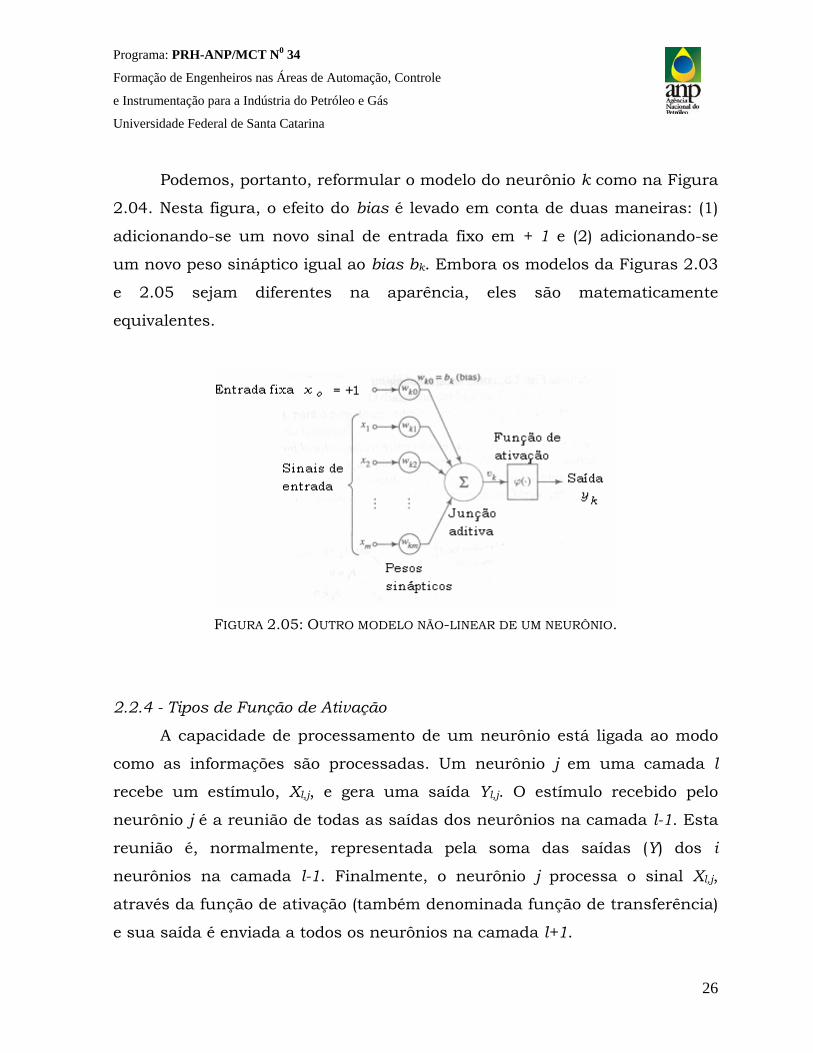
Podemos, portanto, reformular o modelo do neurônio k como na Figura
2.04. Nesta figura, o efeito do bias é levado em conta de duas maneiras: (1)
adicionando-se um novo sinal de entrada fixo em + 1 e (2) adicionando-se
um novo peso sináptico igual ao bias bk. Embora os modelos da Figuras 2.03
e 2.05 sejam diferentes na aparência, eles são matematicamente
equivalentes.
FIGURA 2.05: OUTRO MODELO NÃO-LINEAR DE UM NEURÔNIO.
2.2.4 - Tipos de Função de Ativação
A capacidade de processamento de um neurônio está ligada ao modo
como as informações são processadas. Um neurônio j em uma camada l
recebe um estímulo, Xl,j, e gera uma saída Yl,j. O estímulo recebido pelo
neurônio j é a reunião de todas as saídas dos neurônios na camada l-1. Esta
reunião é, normalmente, representada pela soma das saídas (Y) dos i
neurônios na camada l-1. Finalmente, o neurônio j processa o sinal Xl,j,
através da função de ativação (também denominada função de transferência)
e sua saída é enviada a todos os neurônios na camada l+1.

Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
27
A escolha da função de ativação deve obedecer aos requisitos de
continuidade, diferenciabilidade e monotonicidade.
Algumas das funções de ativação mais utilizadas são listadas a seguir.
a) Função Sigmoidal:
)(11)(
XEXPxfY
−+== (2.8)
Cuja derivada é descrita pela equação 2.9:
( ) ( )YYxfxfdx
xdfdxdY
−=−== 1)(1)()( (2.9)
A Figura 2.06 mostra como a função sigmoidal responde a um estímulo x.
0
0.5
1
-6 -4 -2 0 2 4 6x
f(x)
-∞ +∞
FIGURA 2.06: FUNÇÃO DE TRANSFERÊNCIA SIGMÓIDE.
A função sigmoidal é limitada entre zero e um, apresentando poucas
variações quando seu valor se aproxima de um ou zero. Para evitar esta
saturação, normalmente, o intervalo de trabalho é limitado entre 0,2 e 0,8.
b). Função Tangente Hiperbólica, equação 2.10:
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
28
)(1)(1)tanh()(
XEXPXEXPxxf
−+−−
== (2.10)
Cuja derivada é descrita pela equação 2.11:
( )2)(1)( xfdx
xdf−= (2.11)
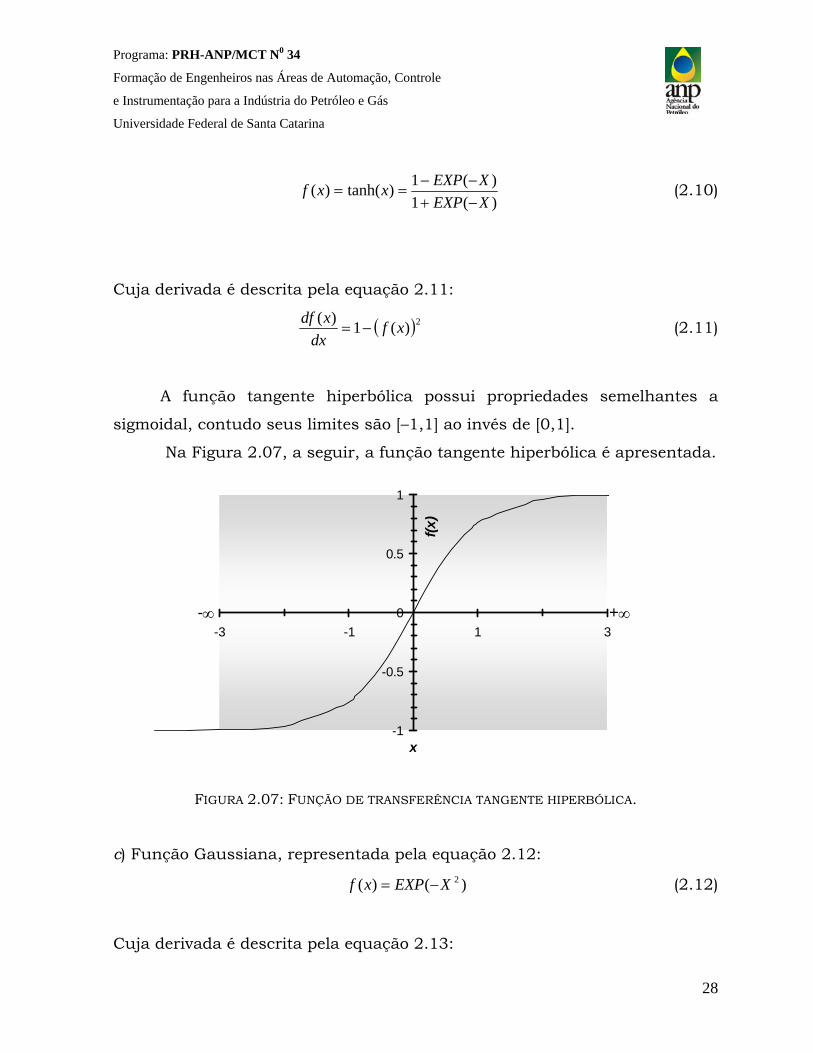
A função tangente hiperbólica possui propriedades semelhantes a
sigmoidal, contudo seus limites são [–1,1] ao invés de [0,1].
Na Figura 2.07, a seguir, a função tangente hiperbólica é apresentada.
FIGURA 2.07: FUNÇÃO DE TRANSFERÊNCIA TANGENTE HIPERBÓLICA.
c) Função Gaussiana, representada pela equação 2.12:
)()( 2XEXPxf −= (2.12)
Cuja derivada é descrita pela equação 2.13:
-1
-0.5
0
0.5
1
-3 -1 1 3
x
f(x)
-∞ +∞
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
29
)(2)( xxfdx
xdf−= (2.13)
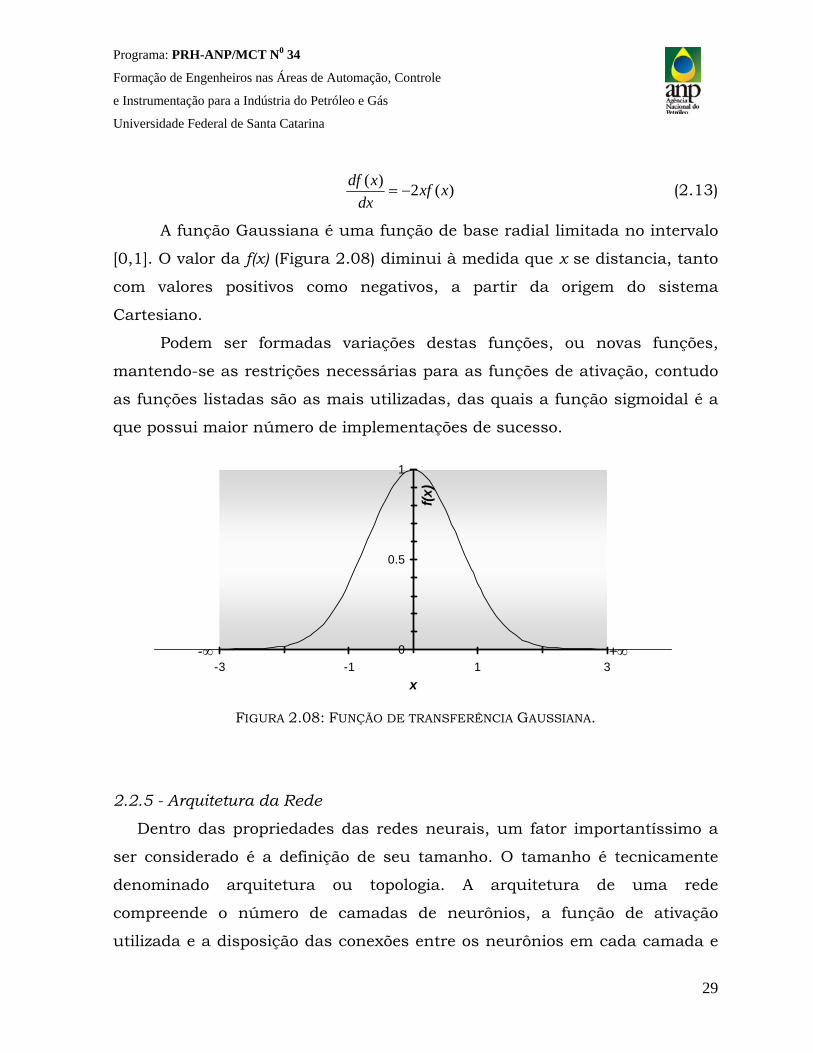
A função Gaussiana é uma função de base radial limitada no intervalo
[0,1]. O valor da f(x) (Figura 2.08) diminui à medida que x se distancia, tanto
com valores positivos como negativos, a partir da origem do sistema
Cartesiano.
Podem ser formadas variações destas funções, ou novas funções,
mantendo-se as restrições necessárias para as funções de ativação, contudo
as funções listadas são as mais utilizadas, das quais a função sigmoidal é a
que possui maior número de implementações de sucesso.
FIGURA 2.08: FUNÇÃO DE TRANSFERÊNCIA GAUSSIANA.
2.2.5 - Arquitetura da Rede
Dentro das propriedades das redes neurais, um fator importantíssimo a
ser considerado é a definição de seu tamanho. O tamanho é tecnicamente
denominado arquitetura ou topologia. A arquitetura de uma rede
compreende o número de camadas de neurônios, a função de ativação
utilizada e a disposição das conexões entre os neurônios em cada camada e
0
0.5
1
-3 -1 1 3x
f(x)
-∞ +∞
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
30
entre as camadas. A capacidade de armazenamento de informações de uma
rede depende da arquitetura utilizada (HAYKIN, 2001):
a) Camada de Entrada: responsável apenas por receber os padrões e
transferi-los para a segunda camada, não é realizado processamento.
Os neurônios desta camada, por apenas distribuir informações, são
denominados neurônios inativos. Em uma rede neural artificial
alimentada adiante, exceto os neurônios na camada de entrada, todos
os demais são ativos.
b) Camada(s) intermediária(s): responsáveis por processar as informações
da camada anterior. Cada neurônio na segunda camada recebe as
saídas da primeira camada multiplicadas pelos pesos, procede a
somatória e em seguida o valor obtido é passado pela função de
ativação. O resultado obtido é então passado à camada seguinte.
c) Camada de Saída: na camada de saída são realizados os últimos
processamentos e os resultados finais são obtidos.
Em geral podemos identificar três classes de arquiteturas de rede de
fundamentalmente diferentes:
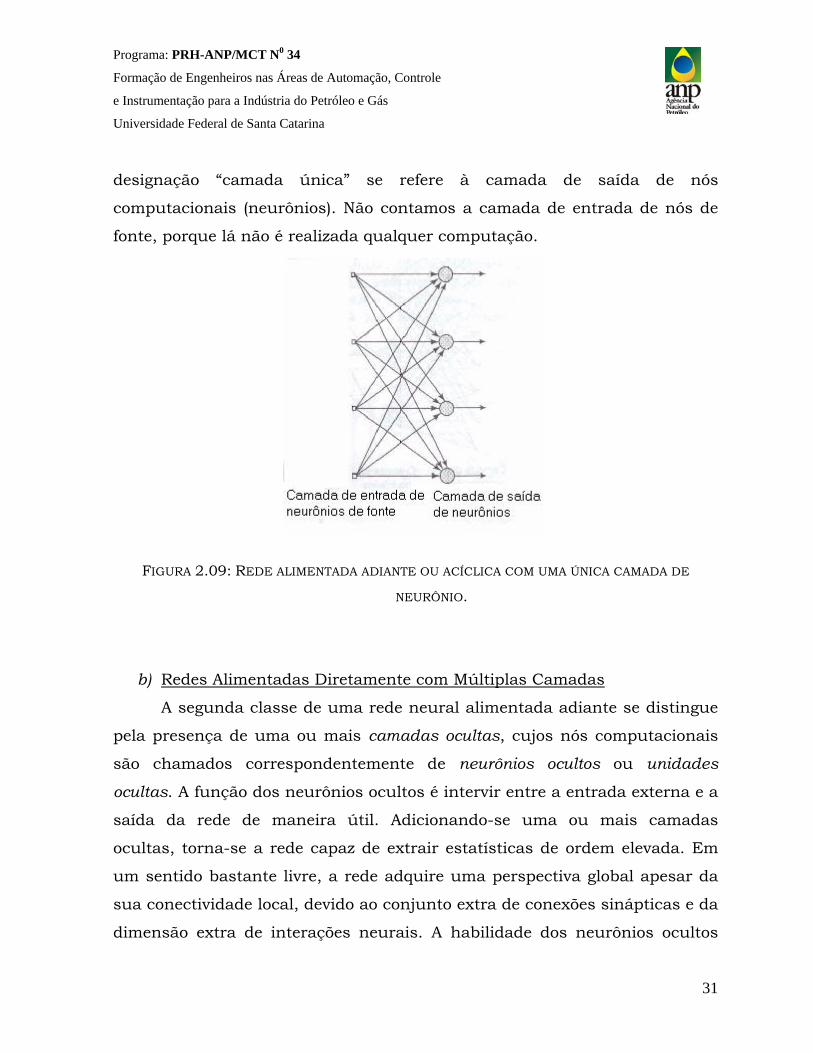
a) Redes Alimentadas Adiante com Camada Única
Em uma rede neural em camadas, os neurônios estão organizados na
forma de camadas. Na forma mais simples de uma rede em camadas, temos
uma camada de entrada de nós de fonte (fornecem sinais de entrada) que se
projeta sobre uma camada de saída de neurônios (nós computacional), mas
não vice-versa. Em outras palavras, esta rede é estritamente do tipo
alimentada adiante ou acíclica (em inglês, feedforward). Ela é ilustrada na
Figura 2.9 para o caso de quatro nós tanto na camada de entrada como na
de saída. Esta rede é chamada de rede de camada única, sendo que a
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
31
designação “camada única” se refere à camada de saída de nós
computacionais (neurônios). Não contamos a camada de entrada de nós de
fonte, porque lá não é realizada qualquer computação.
FIGURA 2.09: REDE ALIMENTADA ADIANTE OU ACÍCLICA COM UMA ÚNICA CAMADA DE
NEURÔNIO.
b) Redes Alimentadas Diretamente com Múltiplas Camadas
A segunda classe de uma rede neural alimentada adiante se distingue
pela presença de uma ou mais camadas ocultas, cujos nós computacionais
são chamados correspondentemente de neurônios ocultos ou unidades
ocultas. A função dos neurônios ocultos é intervir entre a entrada externa e a
saída da rede de maneira útil. Adicionando-se uma ou mais camadas
ocultas, torna-se a rede capaz de extrair estatísticas de ordem elevada. Em
um sentido bastante livre, a rede adquire uma perspectiva global apesar da
sua conectividade local, devido ao conjunto extra de conexões sinápticas e da
dimensão extra de interações neurais. A habilidade dos neurônios ocultos
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
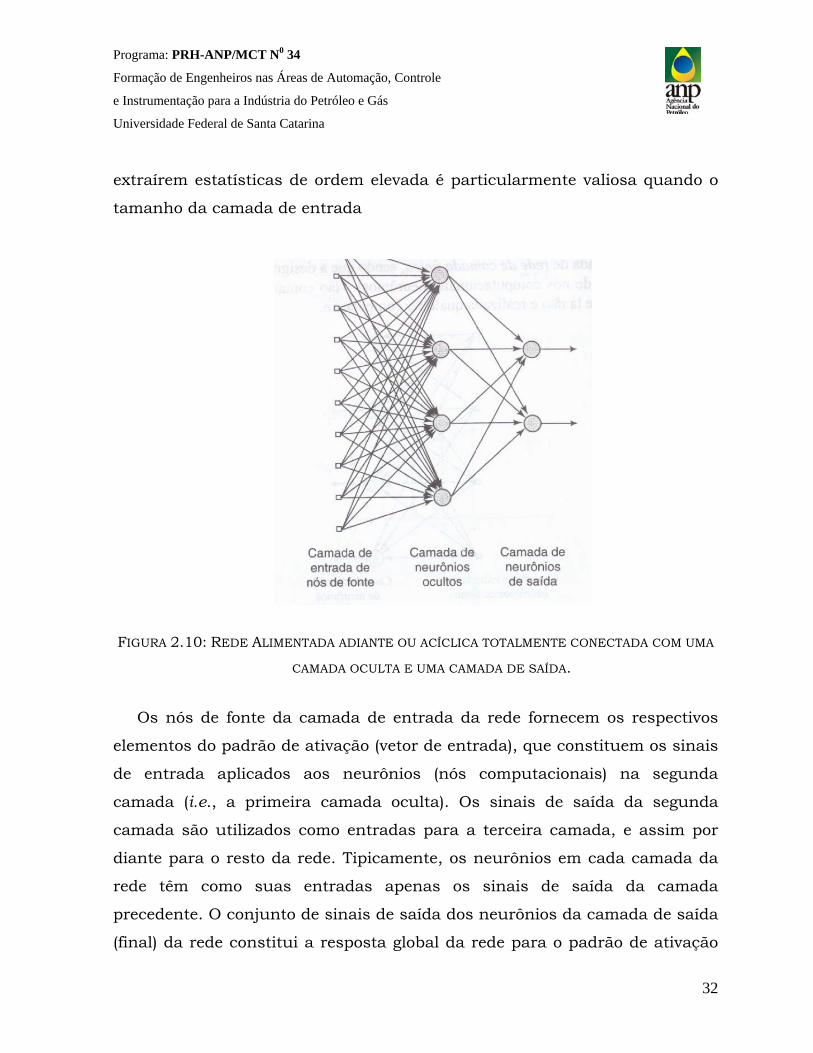
32
extraírem estatísticas de ordem elevada é particularmente valiosa quando o
tamanho da camada de entrada
FIGURA 2.10: REDE ALIMENTADA ADIANTE OU ACÍCLICA TOTALMENTE CONECTADA COM UMA
CAMADA OCULTA E UMA CAMADA DE SAÍDA.
Os nós de fonte da camada de entrada da rede fornecem os respectivos
elementos do padrão de ativação (vetor de entrada), que constituem os sinais
de entrada aplicados aos neurônios (nós computacionais) na segunda
camada (i.e., a primeira camada oculta). Os sinais de saída da segunda
camada são utilizados como entradas para a terceira camada, e assim por
diante para o resto da rede. Tipicamente, os neurônios em cada camada da
rede têm como suas entradas apenas os sinais de saída da camada
precedente. O conjunto de sinais de saída dos neurônios da camada de saída
(final) da rede constitui a resposta global da rede para o padrão de ativação

Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
33
fornecido pelos nós de fonte da camada de entrada (primeira). A Figura 2.10
mostra uma arquitetura de rede neural de múltiplas camadas.
c) Redes Recorrentes
Uma rede neural recorrente se distingue de uma rede neural
alimentada adiante por ter pelo menos um laço de realimentação. Uma rede
recorrente pode consistir, por exemplo, de uma única camada de neurônios
com cada neurônio alimentando seu sinal de saída de volta para as entradas
de todos os outros neurônios, como ilustrado na Figura 2.11. Na estrutura
representada nesta figura, não há laços de auto-alimentação na rede; auto-
alimentada para a sua própria entrada.
FIGURA 2.11: REDE RECORRENTE SEM LAÇOS DE AUTO-REALIMENTAÇÃO E SEM NEURÔNIOS
OCULTOS.
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
34
2.2.6 - Inteligência Artificial e Redes Neurais
O objetivo da inteligência artificial (IA) é o desenvolvimento de
paradigmas ou algoritmos que requeiram máquinas para realizar tarefas
cognitivas, para as quais os humanos são altamente melhores.
Um sistema de IA deve ser capaz de três coisas: (1) armazenar
conhecimento, (2) aplicar o conhecimento armazenado para resolver
problemas e (3) adquirir novo conhecimento através da experiência. Um
sistema IA tem três componentes fundamentais: representação, raciocínio e
apredizagem:
a) Representação. Provavelmente, a característica mais distintiva da IA
seja o uso difundido de uma linguagem de estruturas simbólicas para
representar tanto o conhecimento genérico sobre um domínio do
problema de interesse como o conhecimento específico sobre a solução
do problema;
b) Raciocínio. Na sua forma mais básica, raciocínio é a habilidade de
resolver problemas;
c) Aprendizagem. No modelo de aprendizagem de máquina, o ambiente
fornece alguma informação para um elemento de aprendizagem. Este
utiliza, então, esta informação para aperfeiçoar a base de
conhecimento, e finalmente o elemento de desempenho utiliza a base de
conhecimento para executar a sua tarefa.
2.2.7 - O “Aprendizado” da Rede
O aprendizado da rede caracteriza o método como os pesos (WL) são
ajustados para que um determinado grupo de entradas seja mapeado no
grupo de saídas desejado. A idéia que circunda o chamado aprendizado, para
esta classe de redes, é a idéia de associação. Por exemplo, um indivíduo
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
35
aquecendo um frasco com água tenta prever a temperatura em intervalos
regulares de tempo. Este mesmo indivíduo, imagina que exista uma relação
linear entre a temperatura e o tempo de aquecimento d’água, e portanto
prevê o valor futuro da temperatura a partir de um valor passado. Então o
indivíduo começa o experimento e anota dados do “Valor Previsto” e
“Temperatura Correta” nos devidos intervalos de tempo. Vamos considerar
que este indivíduo tem interesse nas temperaturas entre 10 e 100°C. Ao final
do processo o indivíduo observa os valores reais de temperatura e corrige seu
modo de pensar baseado no erro entre o valor previsto e o correto.
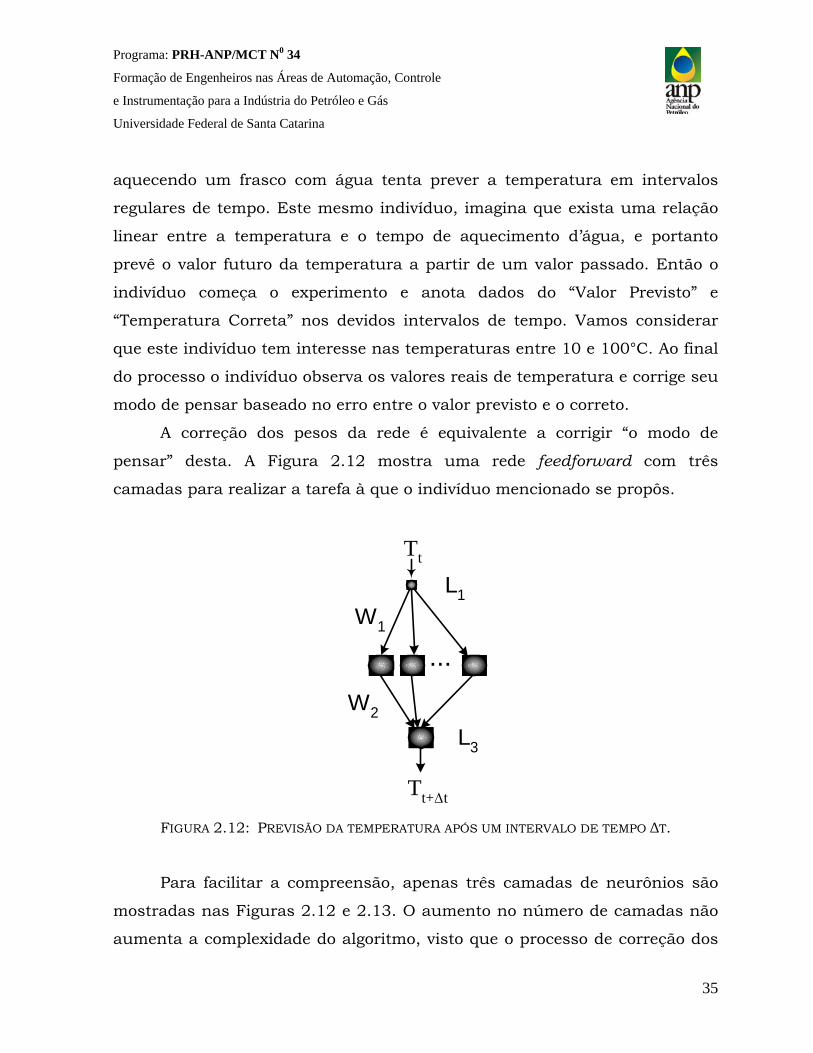
A correção dos pesos da rede é equivalente a corrigir “o modo de
pensar” desta. A Figura 2.12 mostra uma rede feedforward com três
camadas para realizar a tarefa à que o indivíduo mencionado se propôs.
...
Tt+Δt
L1W1
W2
Tt
L3
FIGURA 2.12: PREVISÃO DA TEMPERATURA APÓS UM INTERVALO DE TEMPO ΔT.
Para facilitar a compreensão, apenas três camadas de neurônios são
mostradas nas Figuras 2.12 e 2.13. O aumento no número de camadas não
aumenta a complexidade do algoritmo, visto que o processo de correção dos
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
36
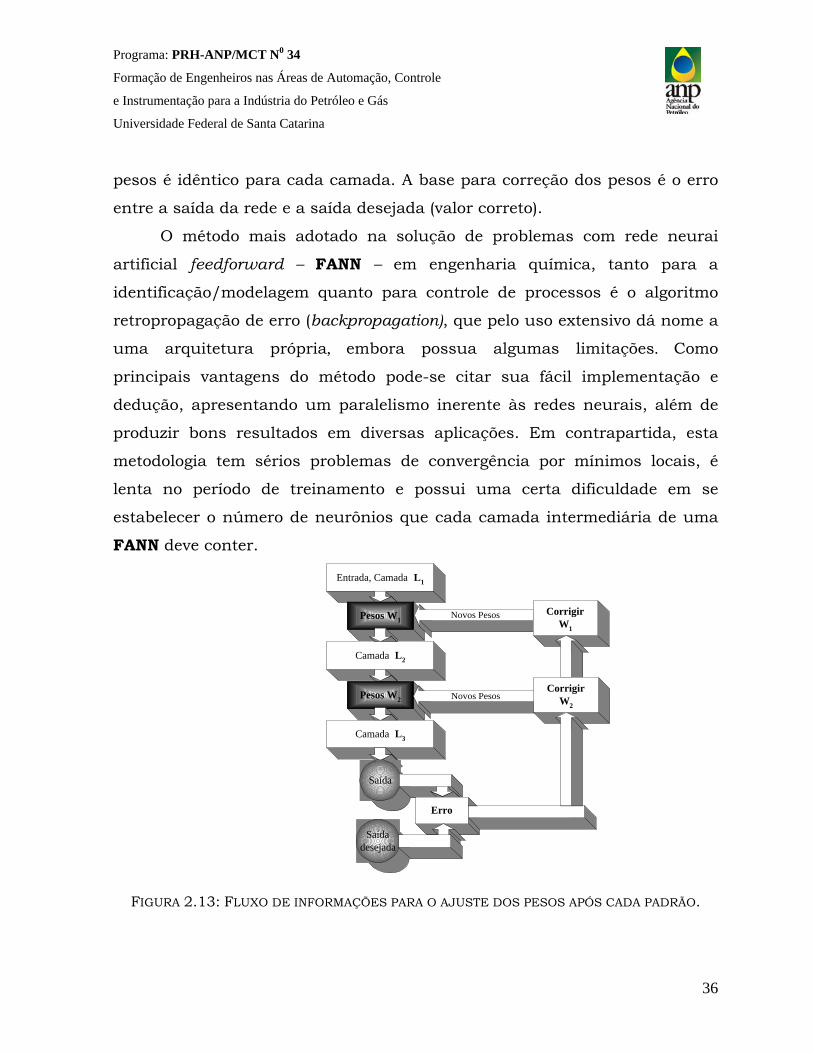
pesos é idêntico para cada camada. A base para correção dos pesos é o erro
entre a saída da rede e a saída desejada (valor correto).
O método mais adotado na solução de problemas com rede neurai
artificial feedforward – FANN – em engenharia química, tanto para a
identificação/modelagem quanto para controle de processos é o algoritmo
retropropagação de erro (backpropagation), que pelo uso extensivo dá nome a
uma arquitetura própria, embora possua algumas limitações. Como
principais vantagens do método pode-se citar sua fácil implementação e
dedução, apresentando um paralelismo inerente às redes neurais, além de
produzir bons resultados em diversas aplicações. Em contrapartida, esta
metodologia tem sérios problemas de convergência por mínimos locais, é
lenta no período de treinamento e possui uma certa dificuldade em se
estabelecer o número de neurônios que cada camada intermediária de uma
FANN deve conter.
FIGURA 2.13: FLUXO DE INFORMAÇÕES PARA O AJUSTE DOS PESOS APÓS CADA PADRÃO.
Entrada, Camada L1
Pesos W1
Camada L2
Pesos W2
Camada L3
Saída
Saídadesejada
Novos Pesos
Novos Pesos
Erro
CorrigirW1
CorrigirW2
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
37
2.2.8 - Algoritmo de Retropropagação de Erro
As redes neurais de múltiplas camadas alimentadas adiante
(feedforward network), consistem de um conjunto de unidades sensoriais
(nós de fonte) que representam a camada de entrada, uma ou mais camadas
ocultas de nós computacionais e uma camada de saída, como supracitado na
seção 2.2.5. O sinal de entrada se propaga para frente através da rede,
camada por camada.Estas redes neurais são também chamadas de
perceptrons de múltiplas camadas (MLP, multilayer perceptron).
Os perceptrons de múltiplas camadas têm sido aplicados com sucesso
para resolver diversos problemas difíceis, através do seu treinamento de
forma supervisionada com um algoritmo muito conhecido como algoritmo de
retropropagação de erro (error backpropagation). Este algoritmo é baseado na
regra de aprendizagem por correção de erro. Como tal pode ser visto como
uma generalização de um algoritmo de filtragem adaptativa igualmente
conhecido: o onipresente algoritmo de mínimo quadrado médio (LMS) para o
caso especial de um único neurônio linear.
Basicamente, a aprendizagem por retropropagação de erro consiste de
dois passos através das diferentes camadas da rede: um passo para frente, a
propagação, e um passo para trás, a retropropagação. No passo para frente,
um padrão de atividade (vetor de entrada) é aplicado aos nós sensoriais de
rede e seu efeito se propaga através da rede, camada por camada.
Finalmente, um conjunto de saídas é produzido como a resposta real da
rede. Durante o passo de propagação, os pesos sinápticos da rede são todos
fixos. Durante o passo para trás, por outro lado, os pesos sinápticos são
todos ajustados de acordo com uma regra de correção de erro.
Especificamente, a resposta real da rede é subtraída de uma resposta
desejada (alvo) para produzir um sinal de erro. Este sinal de erro é então
propagado para trás através da rede, contra a direção das conexões
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
38
sinápticas – vindo daí o nome de “retropropagação de erro”. Os pesos
sinápticos são ajustados para fazer com que a resposta real de rede se mova
para mais perto da resposta desejada, em um sentido estatístico. O algoritmo
de retropropagação de erro é também referido na literatura como algoritmo
de retropropagação (backpropagation). O processo de aprendizagem realizado
como algoritmo é chamado de aprendizagem por retropropagação.
2.3 - Modelagem de Processos Químicos utilizando conhecimento prévio
de Redes Neurais
Não linearidades, tempo morto e parâmetros que variam com o tempo
são fatores que caracterizam a maioria dos processos químicos. Aliado a
essas dificuldades intrínsecas ao processo tem-se, ainda, a exigência
mercadológica de produção com menor custo e elevada qualidade. Esses
fatores têm contribuído para que as indústrias optem por estratégias de
controle preditivo e adaptativo, pois controladores clássicos a parâmetros
constantes, nestes casos, apresentam desempenho limitado.
Em grande parte dos processos industriais o uso dos procedimentos
padrões de projeto de controladores preditivos apresentam dificuldades, pois
dependem da modelagem matemática do processo que, em muitos casos, não
é simples ou apresenta problemas na incorporação de informações
disponíveis, a partir do conhecimento de especialistas. Nestes casos, técnicas
de identificação baseadas em redes neurais têm sido aplicadas.
Por causa da habilidade de aproximar funções complexas, as redes
neurais artificiais (ANNs) têm sido explorada como modelo de processos
químicos (THOMPSON, 1994). A vantagem principal de modelos de redes
neurais é que elas podem ser sintetizadas sem conhecimento detalhado do
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
39
processo em questão. Apenas após apresentação das informações, a rede
neural se comporta conforme especificação do processo em particular. Esta
propriedade é comum a uma grande classe de modelos de forma funcional
flexíveis, conhecidos como modelos não-paramétricos que incluem ANNs e
série de Fourier, por exemplo. Porém, a grande dificuldade da utilização de
uma ANN é a necessidade de um conjunto relativamente grande de dados de
entrada/saída do processo para seu treinamento e que nem sempre estão
disponíveis ou passíveis de obtenção.
Neste trabalho, como modelo empírico para processo de reação em
batelada, utilizou-se uma rede neural feedforward (FANN). Este tipo de rede
está entre as mais estudadas em processos de engenharia, principalmente
por ser de fácil compreensão e implementação computacional, com uma
simples definição matemática e com grande capacidade para aplicações em
identificação/modelagem e controle de processos.
Considerando especificamente a aplicação da FANN para a
modelagem/identificação empírica de sistemas, o número de neurônios da
camada de entrada da rede depende do número de variáveis relevantes para
representar o processo. O número de neurônios da camada de saída depende
do número de variáveis que se deseja avaliar, que correspondem, na maioria
das vezes, nas saídas processo que devem ser determinadas. Para o processo
que se deseja modelar, reator em batelada sob agitação constante, a função
que representa a rede pode ser descrita pela Equação 2.14:
( ) ( ) ( ) ( ) ( )[ ]2211 ,;1,1 dkUdkUkykyfky −−−=+ (2.14)
onde f é a função que considera todos os processamentos da rede. U1(k-d1) e
U2(k-d2) são, respectivamente, as entradas 1 e 2 do processo, com d1 e d2
sendo o tempo morto em relação a cada variável de entrada. y(k) e y(k-1) são,
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
40
respectivamente, as saídas do processo nos instantes k e k-1, de um sistema
MISO (Multiple Input / Single Output). No sistema “reator batelada” estudado,
a variável de saída de interesse é a temperatura de reação, y, sendo esta
controlada pela manipulação das aberturas das válvulas de controle de vazão
de vapor, U1, e de controle de descarte de água quente da camisa e
alimentação de água fria, U2. Ainda, o sistema está sujeito às restrições
descritas pelas Equações 2.15 e 2.16.
⎩⎨⎧
≤≤≤≤
voltsUvoltvoltsUvolt
5151
2
1 (2.15)
MáximaaTemperaturyMínimaaTemperatur ≤≤ (2.16)
Quando a abertura das válvulas for selecionada em 1 volt, significa que
esta se encontra completamente fechada e 5 volts indicam 100% de abertura
para as válvulas de controle de vazão. As restrições na temperatura
obedecem aos limites físicos do sistema. Considerando que este não é dotado
de sistema de refrigeração, a menor temperatura que se consegue é o
equilíbrio com a temperatura ambiente, sendo a maior o ponto de ebulição
da água, meio contínuo utilizado na polimerização em suspensão do
estireno.
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
41
2.4 – Considerações finais
Levando-se em consideração as dificuldades existentes na obtenção de
modelos que descrevam adequadamente o processo em todas as suas
possíveis faixas de operação, este trabalho apresenta aplicações de uma
rede neural. Como modelo empírico para o controle de temperatura de um
reator de mistura em regime de batelada.
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
42
METODOLOGIA
3.1 - Unidades Experimentais
Os experimentos foram desenvolvidos junto ao Laboratório de Controle
de Processos do Departamento de Engenharia Química e Engenharia de
Alimentos da Universidade Federal de Santa Catariana (EQA/CTC/UFSC). A
implementação de um sistema de controle de temperatura foi realizada em
um sistema piloto com um reator de aço, ilustrado na Figura 3.1.
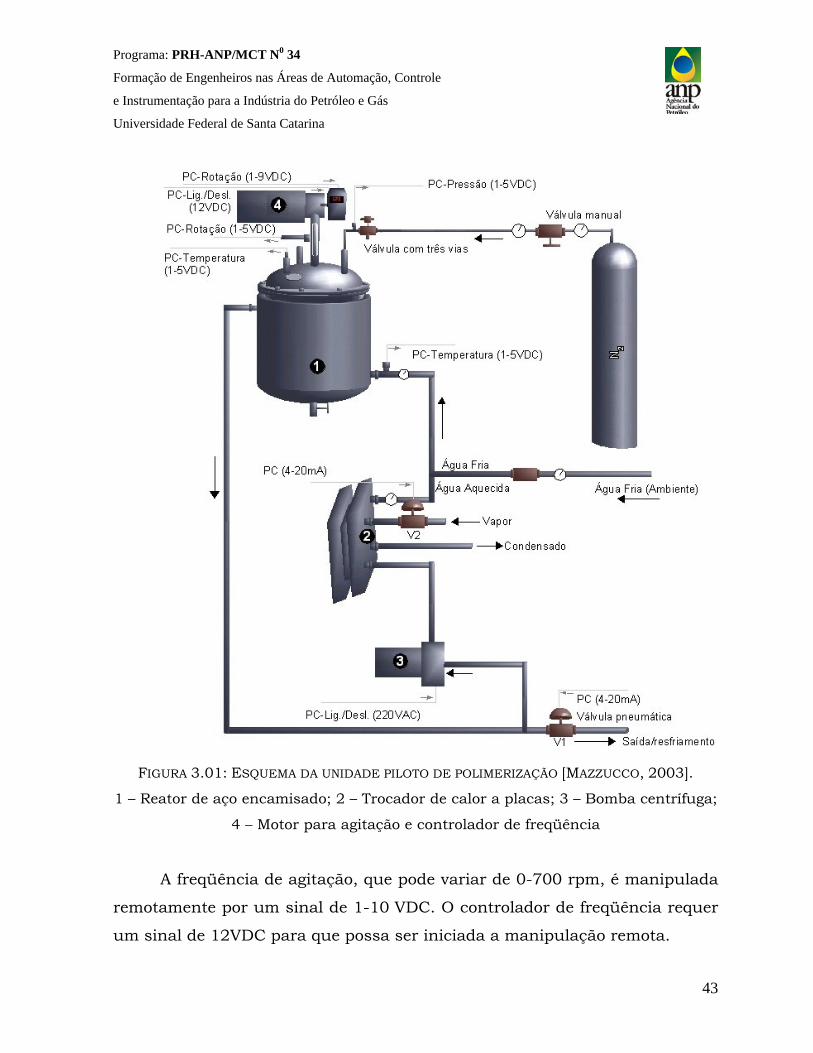
Essa unidade de reação é constituída, basicamente, de um reator
encamisado em aço inox 316L, marca Suprilab Ltda, com capacidade de 5
litros e pressão máxima de 15 kgf/cm2, provido de um sistema de agitação
com acionamento por software, com um motor trifásico marca Eberle com
saída reduzida em 1:5, um controlador de freqüência da marca Siemens e
um agitador do tipo turbina dupla, centrada, que se estende até a base do
reator. As trocas térmicas necessárias ao reator são realizadas por um
trocador de calor a placas com correntes cruzadas, marca Alfa Laval, uma
bomba centrífuga de ¼ cv, marca Schneider, modelo 02.01, além de duas
válvulas pneumáticas do tipo igual porcentagem ar-abre/falha-fecha, da
marca Badge Meter Inc, que são responsáveis pela dosagem das correntes
quente e fria. Também faz parte do sistema um termopar do tipo J da marca
Ecil em conjunto com um amplificador/transmissor, além de um reservatório
de nitrogênio gasoso. A Figura 3.01 mostra o esquema da planta piloto
utilizada para as reações de polimerização em suspensão do estireno e
estudo/aplicação da estratégia de controle desenvolvida. Maiores detalhes
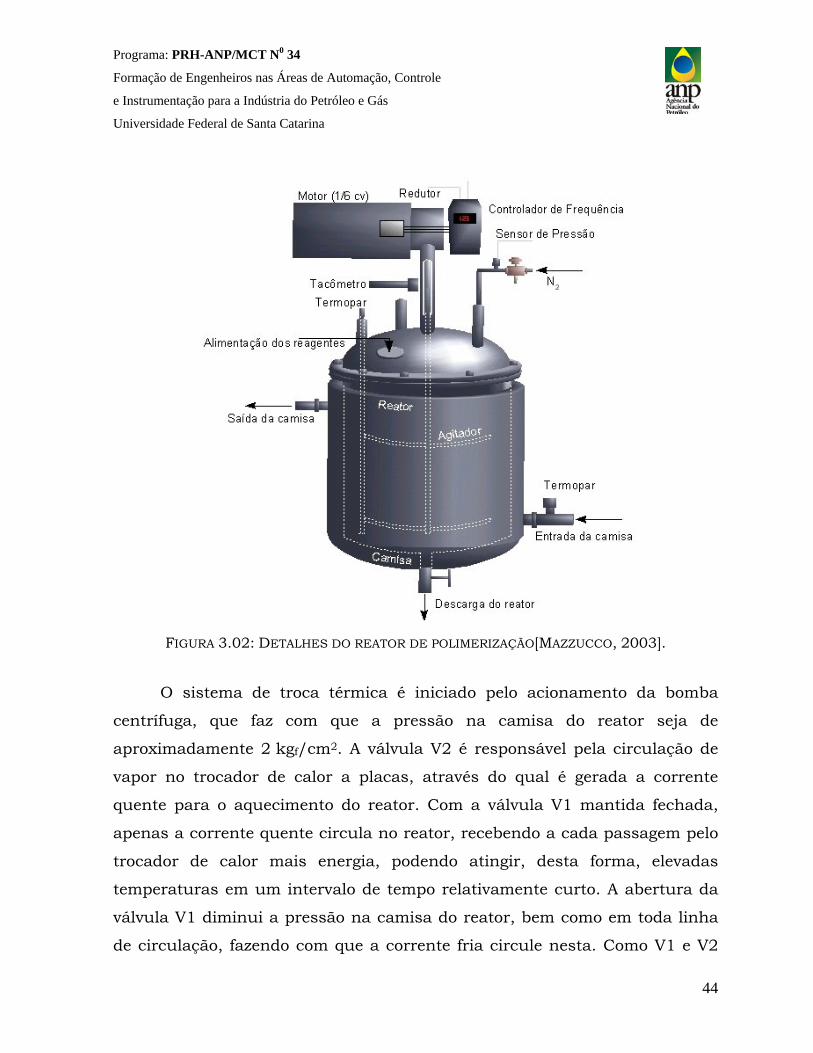
sobre o reator podem ser observados na Figura 3.02.
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
43
FIGURA 3.01: ESQUEMA DA UNIDADE PILOTO DE POLIMERIZAÇÃO [MAZZUCCO, 2003].
1 – Reator de aço encamisado; 2 – Trocador de calor a placas; 3 – Bomba centrífuga;
4 – Motor para agitação e controlador de freqüência
A freqüência de agitação, que pode variar de 0-700 rpm, é manipulada
remotamente por um sinal de 1-10 VDC. O controlador de freqüência requer
um sinal de 12VDC para que possa ser iniciada a manipulação remota.
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
44
FIGURA 3.02: DETALHES DO REATOR DE POLIMERIZAÇÃO[MAZZUCCO, 2003].
O sistema de troca térmica é iniciado pelo acionamento da bomba
centrífuga, que faz com que a pressão na camisa do reator seja de
aproximadamente 2 kgf/cm2. A válvula V2 é responsável pela circulação de
vapor no trocador de calor a placas, através do qual é gerada a corrente
quente para o aquecimento do reator. Com a válvula V1 mantida fechada,
apenas a corrente quente circula no reator, recebendo a cada passagem pelo
trocador de calor mais energia, podendo atingir, desta forma, elevadas
temperaturas em um intervalo de tempo relativamente curto. A abertura da
válvula V1 diminui a pressão na camisa do reator, bem como em toda linha
de circulação, fazendo com que a corrente fria circule nesta. Como V1 e V2
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
45
são válvulas proporcionais, é possível obter a temperatura ótima para a
reação.
O vapor é fornecido por uma caldeira com aquecimento elétrica, marca
SIMILI, tipo SIM-HE, com capacidade de produção de 100 Kg/h de vapor e
pressão de trabalho de 8,4 Kgf/cm2. Devido ao seu sistema de controle,
fornece vapor a uma pressão que pode variar de 3 a 7 Kgf/cm2,
caracterizando uma forte fonte de perturbação ao sistema de polimerização.
A água, para refrigeração, é proveniente da própria rede hidráulica do
laboratório, estando sempre a temperatura ambiente.
O acionamento das válvulas pneumáticas é realizado através de
conversores eletropneumáticos, marca Helix, com sinal de entrada de 4-20
mA e saída de 3-15 psi, a partir de uma alimentação contínua de 20 psi,
obtida por um filtro regulador de pressão, marca Hélix - tipo F11-11, que
suporta uma pressão de alimentação de até 250 psi.
Esta unidade possui um sistema remoto de controle de temperatura e
freqüência de agitação realizado através de microcomputador PC-Intel
Pentium III 500MHz, uma placa de aquisição de dados AD/DA marca Data
Translation modelo DT2812 e software para processamento em tempo real
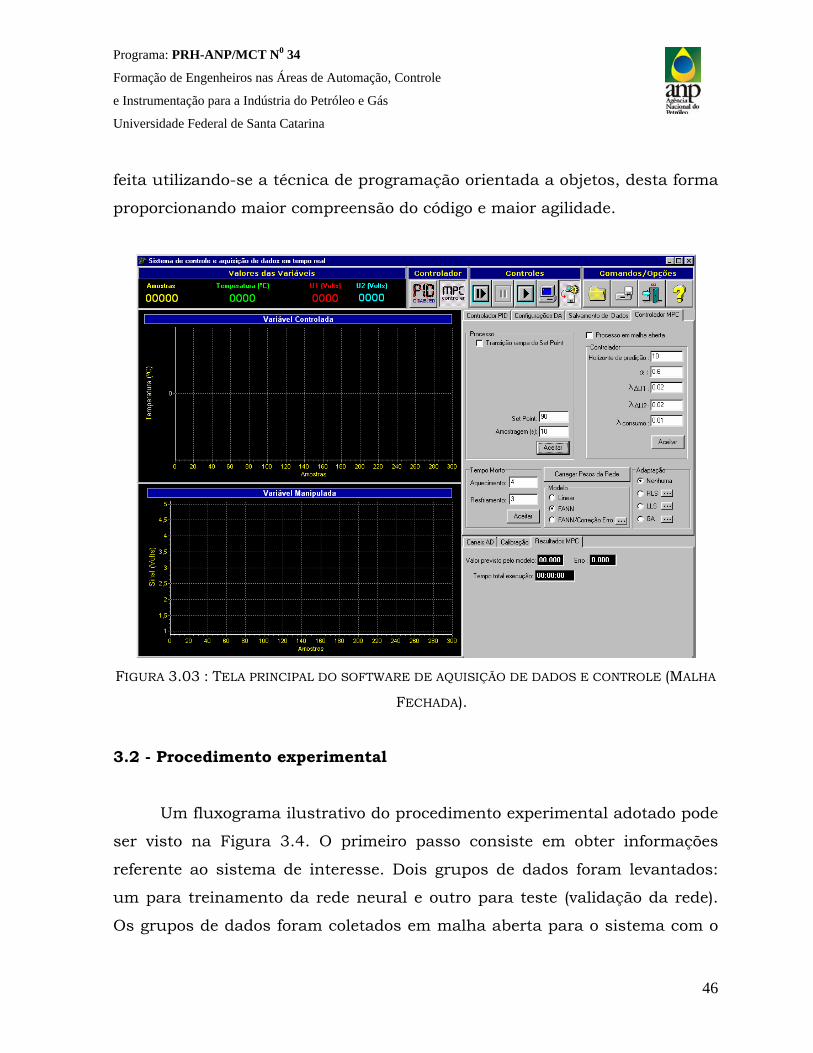
desenvolvido no próprio laboratório. A Figura 3.3 mostra a tela principal do
software desenvolvido por CANCELIER (2004) para a aplicação das
estratégias de controle e aquisição de dados.
O software foi desenvolvido em linguagem Object-Pascal, utilizando-se
o ambiente integrado para desenvolvimento Borland Delphi 5.0®. Este
ambiente dispõe de ferramentas de grande utilidade para agilizar a
escrita/manutenção do código e rastreamento de erros de sintaxe e lógica,
facilitando o projeto da interface com o usuário. A codificação dos módulos
de aquisição de dados, algoritmos de controle e algoritmos de otimização foi
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
46
feita utilizando-se a técnica de programação orientada a objetos, desta forma
proporcionando maior compreensão do código e maior agilidade.
FIGURA 3.03 : TELA PRINCIPAL DO SOFTWARE DE AQUISIÇÃO DE DADOS E CONTROLE (MALHA
FECHADA).
3.2 - Procedimento experimental
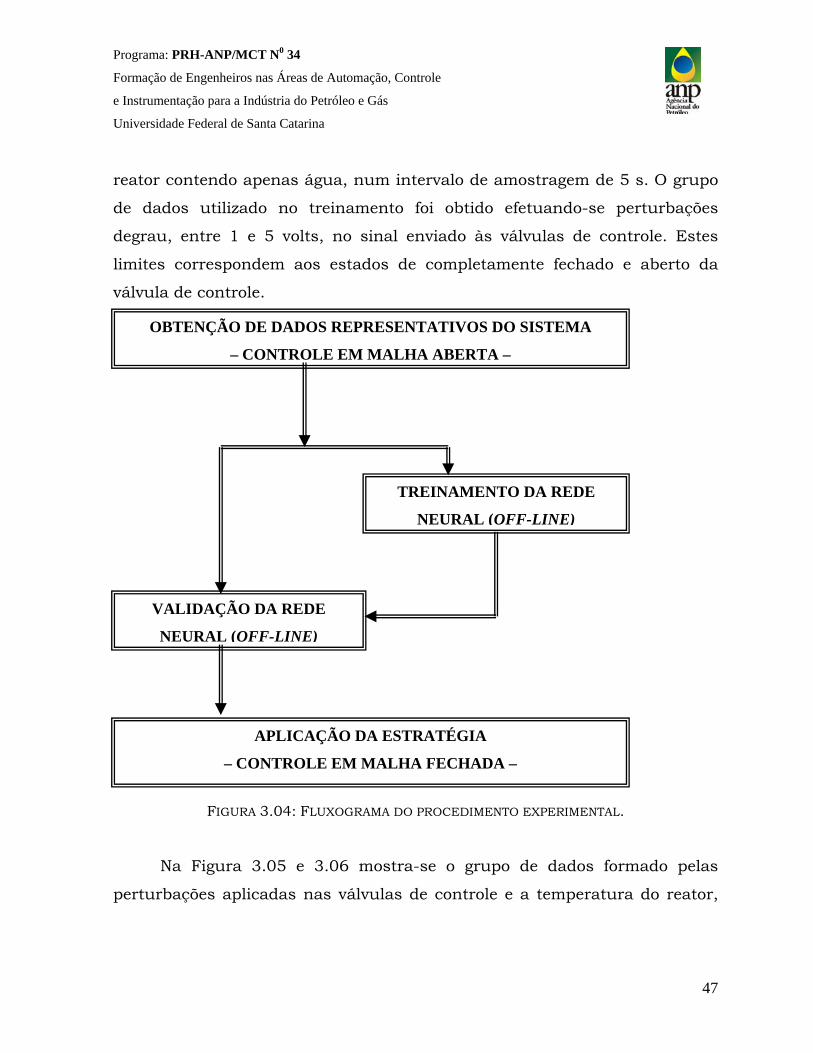
Um fluxograma ilustrativo do procedimento experimental adotado pode
ser visto na Figura 3.4. O primeiro passo consiste em obter informações
referente ao sistema de interesse. Dois grupos de dados foram levantados:
um para treinamento da rede neural e outro para teste (validação da rede).
Os grupos de dados foram coletados em malha aberta para o sistema com o
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
47
reator contendo apenas água, num intervalo de amostragem de 5 s. O grupo
de dados utilizado no treinamento foi obtido efetuando-se perturbações
degrau, entre 1 e 5 volts, no sinal enviado às válvulas de controle. Estes
limites correspondem aos estados de completamente fechado e aberto da
válvula de controle.
FIGURA 3.04: FLUXOGRAMA DO PROCEDIMENTO EXPERIMENTAL.
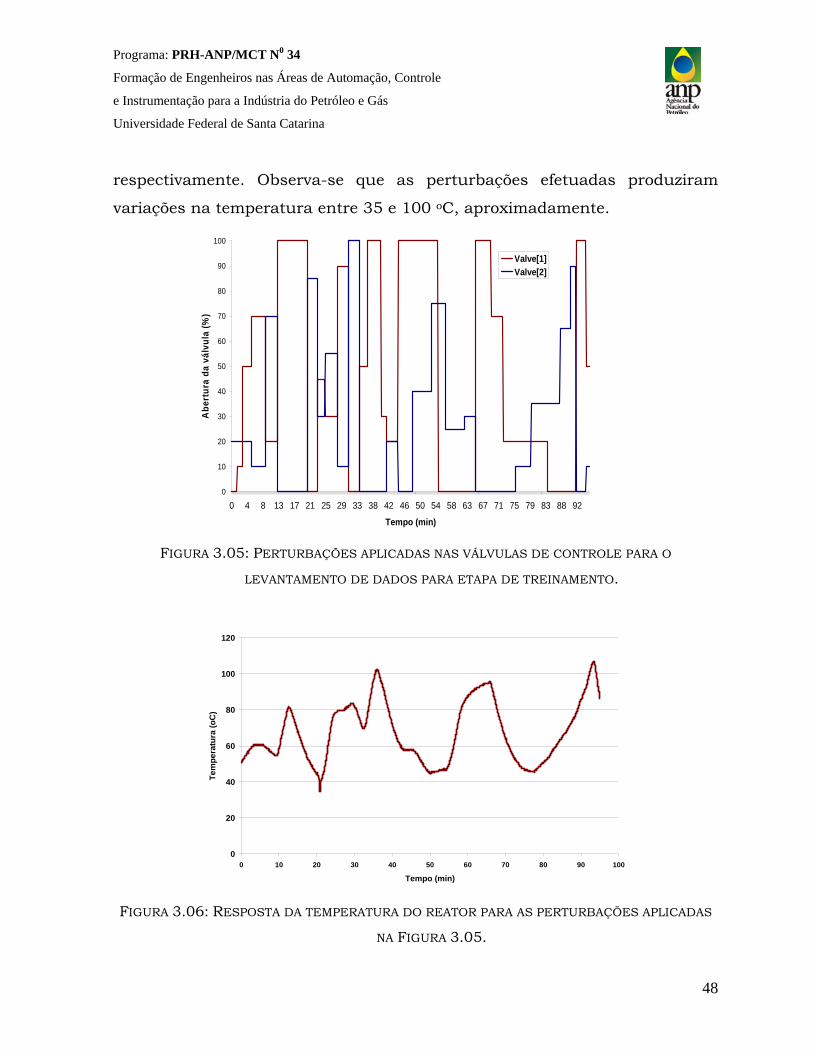
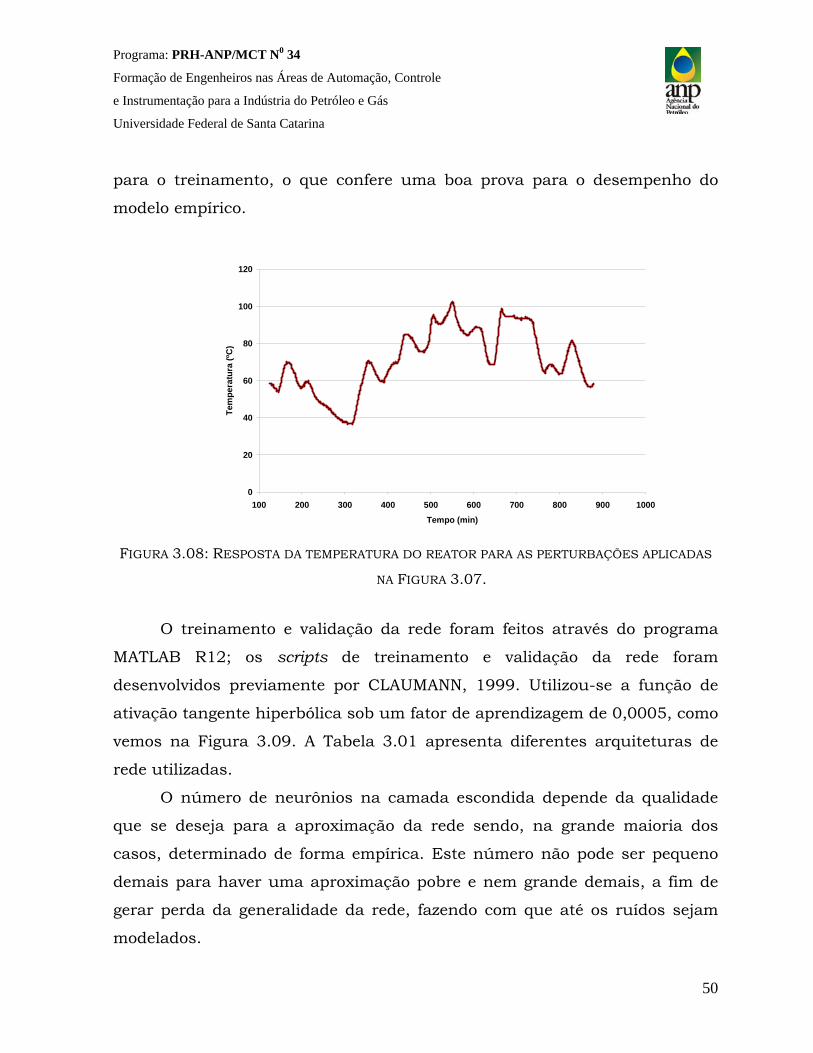
Na Figura 3.05 e 3.06 mostra-se o grupo de dados formado pelas
perturbações aplicadas nas válvulas de controle e a temperatura do reator,
OBTENÇÃO DE DADOS REPRESENTATIVOS DO SISTEMA
– CONTROLE EM MALHA ABERTA –
TREINAMENTO DA REDE
NEURAL (OFF-LINE)
VALIDAÇÃO DA REDE
NEURAL (OFF-LINE)
APLICAÇÃO DA ESTRATÉGIA
– CONTROLE EM MALHA FECHADA –
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
48
respectivamente. Observa-se que as perturbações efetuadas produziram
variações na temperatura entre 35 e 100 oC, aproximadamente.
0
10
20
30
40
50
60
70
80
90
100
0 4 8 13 17 21 25 29 33 38 42 46 50 54 58 63 67 71 75 79 83 88 92
Tempo (min)
Abe
rtur
a da
vál
vula
(%)
Valve[1]Valve[2]
FIGURA 3.05: PERTURBAÇÕES APLICADAS NAS VÁLVULAS DE CONTROLE PARA O
LEVANTAMENTO DE DADOS PARA ETAPA DE TREINAMENTO.
0
20
40
60
80
100
120
0 10 20 30 40 50 60 70 80 90 100
Tempo (min)
Tem
pera
tura
(oC
)
FIGURA 3.06: RESPOSTA DA TEMPERATURA DO REATOR PARA AS PERTURBAÇÕES APLICADAS
NA FIGURA 3.05.

Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
49
Para garantir que a rede identifique bem o sistema é importante que se
tenha perturbações aleatórias, aplicadas em toda a faixa de trabalho. Cabe
ressaltar que, como as válvulas estão desacopladas, a princípio qualquer
combinação de abertura das válvulas para as perturbações poderia ser
aplicada, entretanto como se objetiva estabelecer uma lei de controle de
modo a proporcionar economia no consumo de vapor, principalmente, os
dados para treinamento também devem ser obtidos de modo a considerar
esta premissa.
1
2
3
4
5
100 200 300 400 500 600 700 800 900 1000
Tempo (min)
Abe
rtur
a da
vál
vula
(%)
Uaq(Volts)Uresf(Volts)
25
0
50
75
100
FIGURA 3.07: PERTURBAÇÕES APLICADAS NAS VÁLVULAS DE CONTROLE PARA O
LEVANTAMENTO DE DADOS PARA ETAPA DE VALIDAÇÃO.
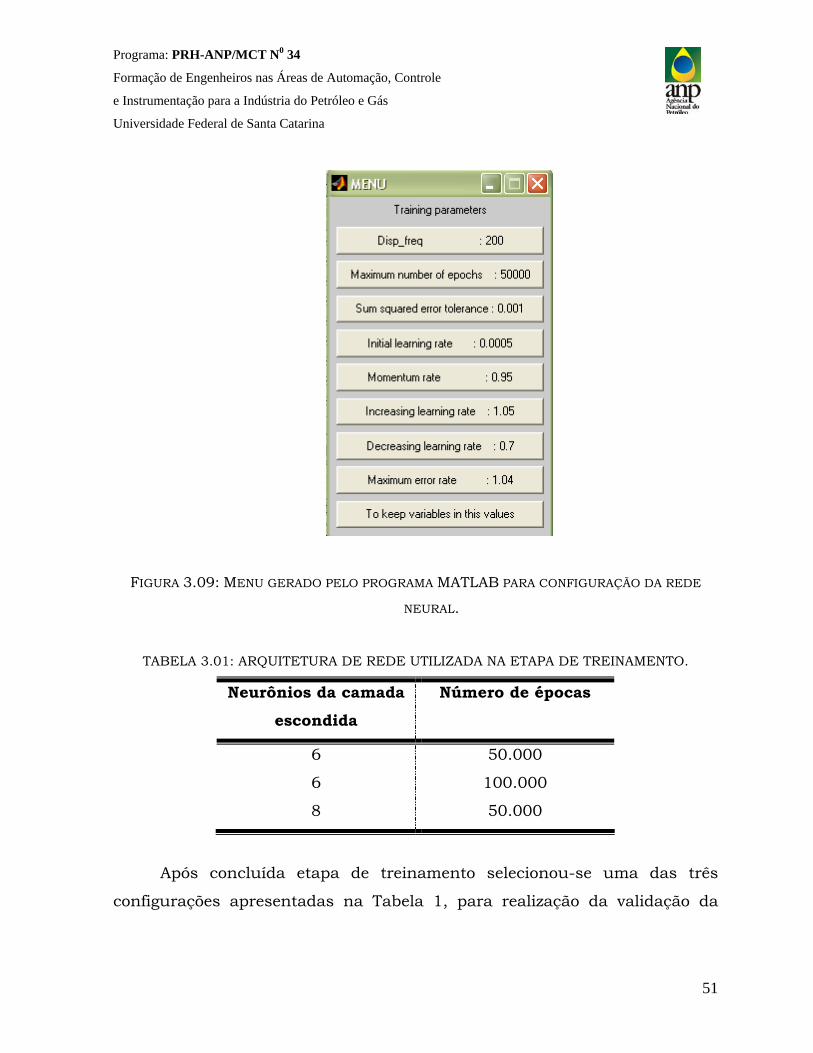
Para a obtenção do grupo de dados de validação da rede, o mesmo
procedimento foi seguido. Nas Figuras 3.07 e 3.08 mostram-se o grupo de
dados formado pelas perturbações aplicadas nas válvulas de controle e a
temperatura do reator, respectivamente. É possível observar, principalmente
por comparação entre as perturbações feitas, Figura 3.05 e Figura 3.07, que
o grupo de dados obtido para o teste da rede difere bastante daquele obtido
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
50
para o treinamento, o que confere uma boa prova para o desempenho do
modelo empírico.
0
20
40
60
80
100
120
100 200 300 400 500 600 700 800 900 1000
Tempo (min)
Tem
pera
tura
(ºC
)
FIGURA 3.08: RESPOSTA DA TEMPERATURA DO REATOR PARA AS PERTURBAÇÕES APLICADAS
NA FIGURA 3.07.
O treinamento e validação da rede foram feitos através do programa
MATLAB R12; os scripts de treinamento e validação da rede foram
desenvolvidos previamente por CLAUMANN, 1999. Utilizou-se a função de
ativação tangente hiperbólica sob um fator de aprendizagem de 0,0005, como
vemos na Figura 3.09. A Tabela 3.01 apresenta diferentes arquiteturas de
rede utilizadas.
O número de neurônios na camada escondida depende da qualidade
que se deseja para a aproximação da rede sendo, na grande maioria dos
casos, determinado de forma empírica. Este número não pode ser pequeno
demais para haver uma aproximação pobre e nem grande demais, a fim de
gerar perda da generalidade da rede, fazendo com que até os ruídos sejam
modelados.
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
51
FIGURA 3.09: MENU GERADO PELO PROGRAMA MATLAB PARA CONFIGURAÇÃO DA REDE
NEURAL.
TABELA 3.01: ARQUITETURA DE REDE UTILIZADA NA ETAPA DE TREINAMENTO.
Neurônios da camada
escondida
Número de épocas
6 50.000
6 100.000
8 50.000
Após concluída etapa de treinamento selecionou-se uma das três
configurações apresentadas na Tabela 1, para realização da validação da
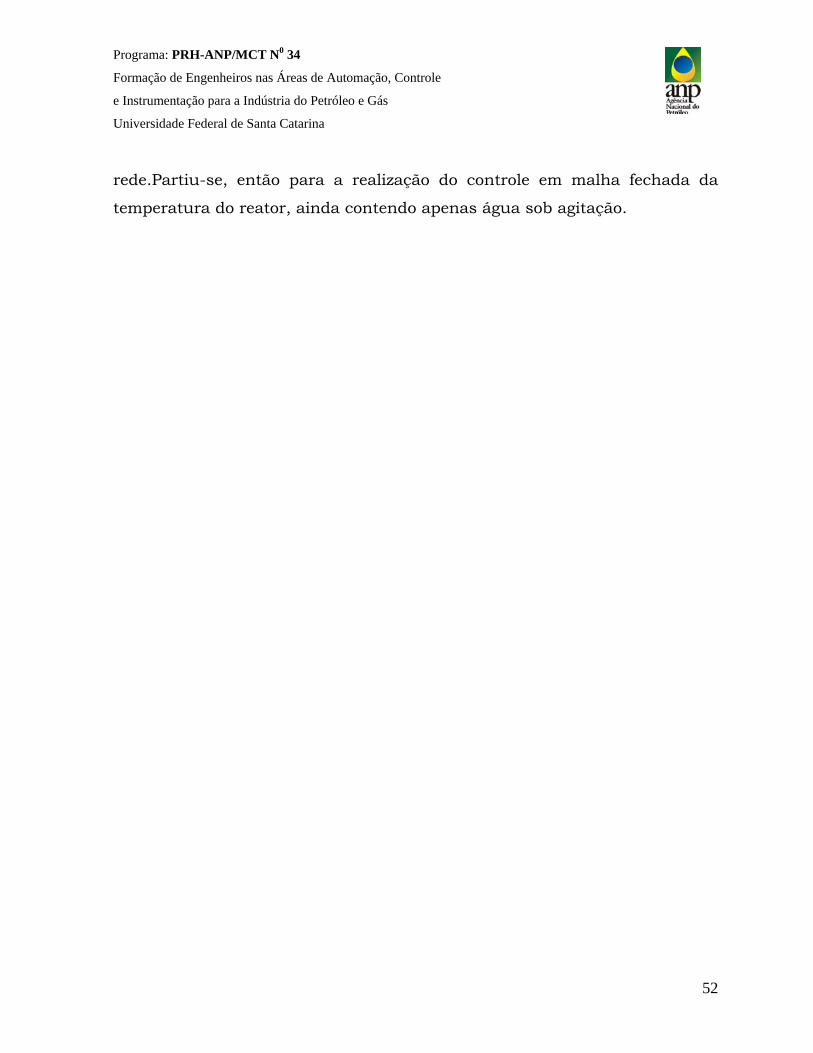
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
52
rede.Partiu-se, então para a realização do controle em malha fechada da
temperatura do reator, ainda contendo apenas água sob agitação.
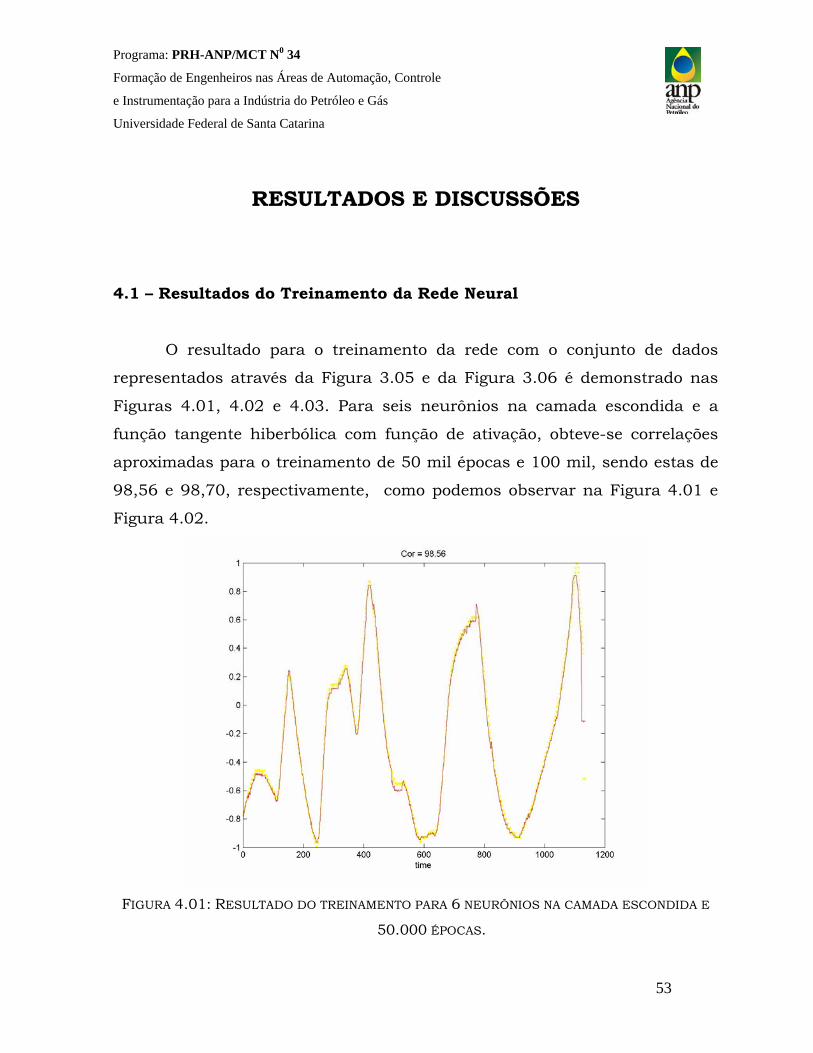
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
53
RESULTADOS E DISCUSSÕES
4.1 – Resultados do Treinamento da Rede Neural
O resultado para o treinamento da rede com o conjunto de dados
representados através da Figura 3.05 e da Figura 3.06 é demonstrado nas
Figuras 4.01, 4.02 e 4.03. Para seis neurônios na camada escondida e a
função tangente hiberbólica com função de ativação, obteve-se correlações
aproximadas para o treinamento de 50 mil épocas e 100 mil, sendo estas de
98,56 e 98,70, respectivamente, como podemos observar na Figura 4.01 e
Figura 4.02.
FIGURA 4.01: RESULTADO DO TREINAMENTO PARA 6 NEURÔNIOS NA CAMADA ESCONDIDA E
50.000 ÉPOCAS.
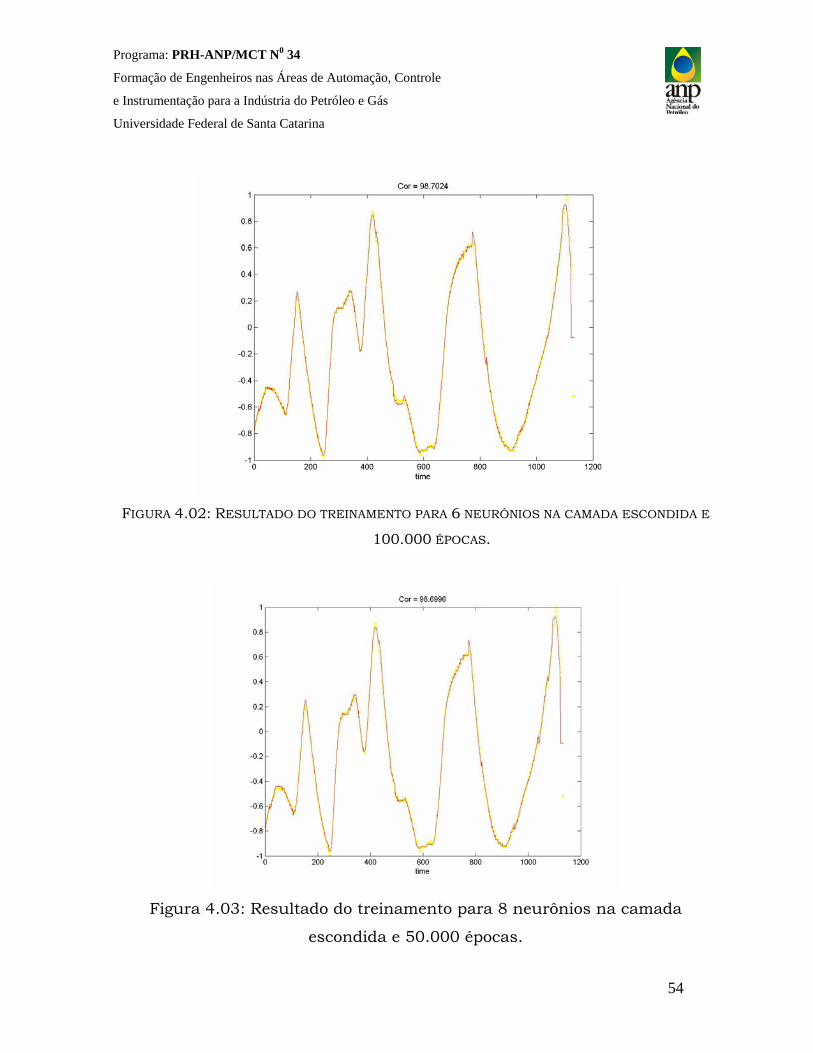
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
54
FIGURA 4.02: RESULTADO DO TREINAMENTO PARA 6 NEURÔNIOS NA CAMADA ESCONDIDA E
100.000 ÉPOCAS.
Figura 4.03: Resultado do treinamento para 8 neurônios na camada
escondida e 50.000 épocas.
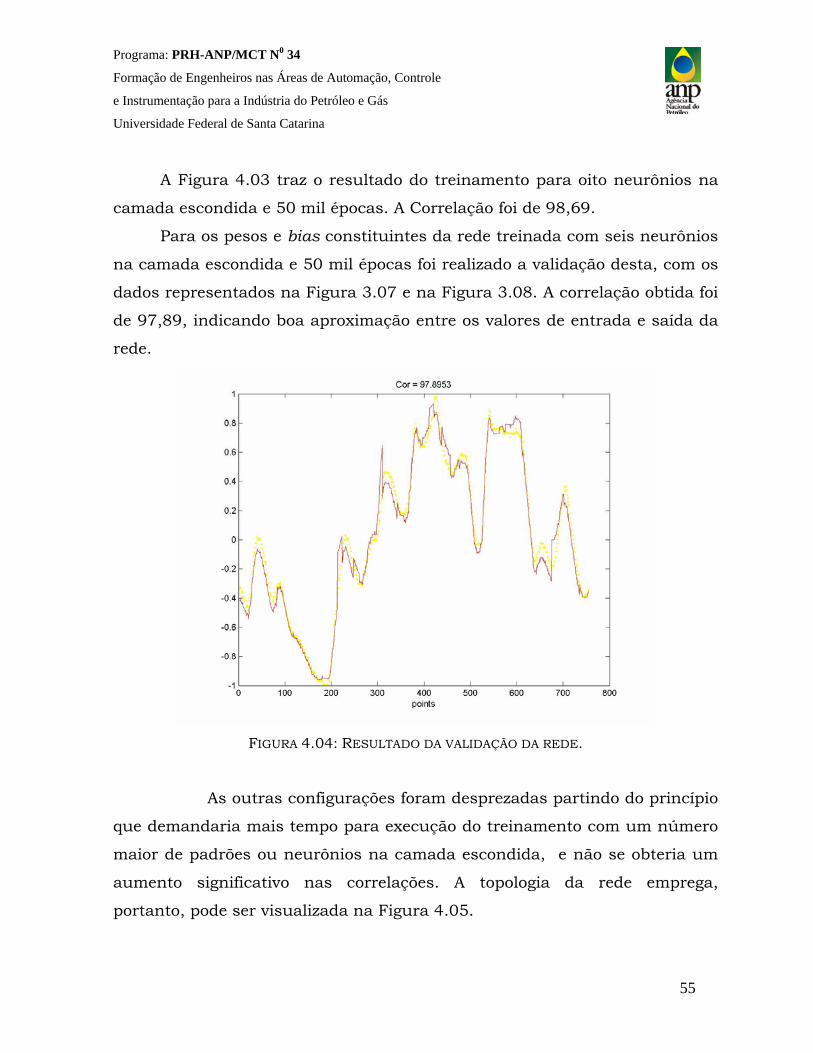
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
55
A Figura 4.03 traz o resultado do treinamento para oito neurônios na
camada escondida e 50 mil épocas. A Correlação foi de 98,69.
Para os pesos e bias constituintes da rede treinada com seis neurônios
na camada escondida e 50 mil épocas foi realizado a validação desta, com os
dados representados na Figura 3.07 e na Figura 3.08. A correlação obtida foi
de 97,89, indicando boa aproximação entre os valores de entrada e saída da
rede.
FIGURA 4.04: RESULTADO DA VALIDAÇÃO DA REDE.
As outras configurações foram desprezadas partindo do princípio
que demandaria mais tempo para execução do treinamento com um número
maior de padrões ou neurônios na camada escondida, e não se obteria um
aumento significativo nas correlações. A topologia da rede emprega,
portanto, pode ser visualizada na Figura 4.05.
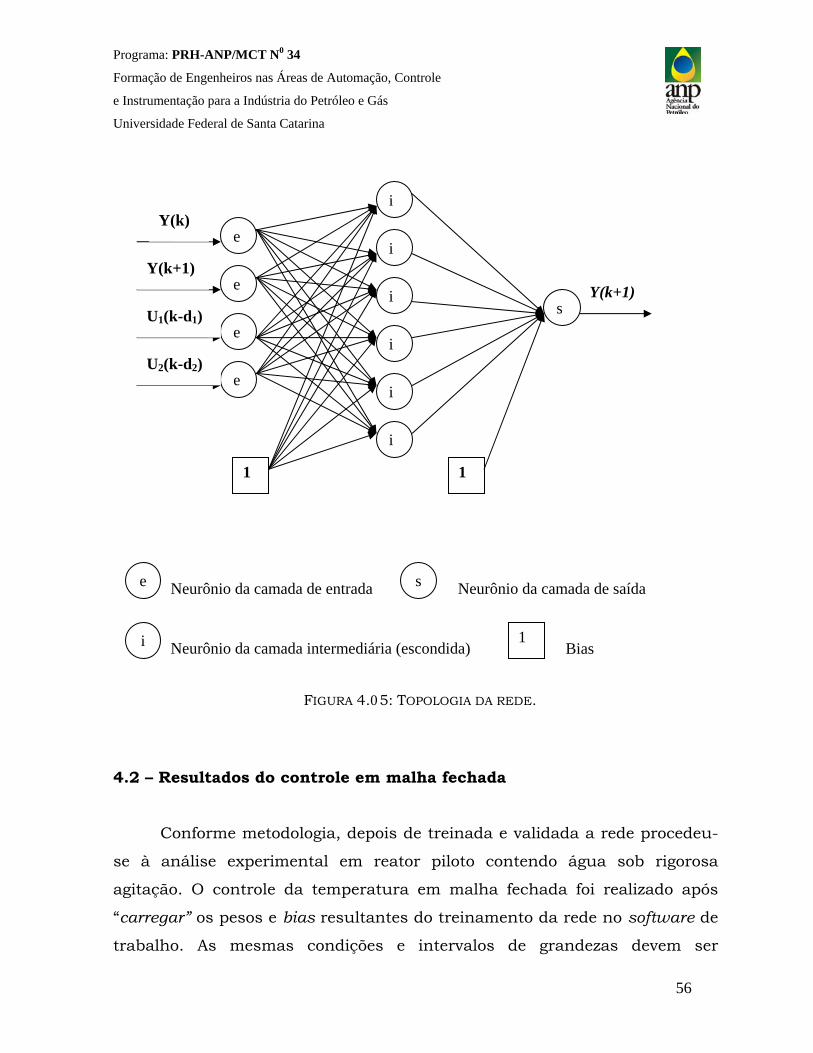
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
56
FIGURA 4.05: TOPOLOGIA DA REDE.
4.2 – Resultados do controle em malha fechada
Conforme metodologia, depois de treinada e validada a rede procedeu-
se à análise experimental em reator piloto contendo água sob rigorosa
agitação. O controle da temperatura em malha fechada foi realizado após
“carregar” os pesos e bias resultantes do treinamento da rede no software de
trabalho. As mesmas condições e intervalos de grandezas devem ser
Neurônio da camada de entrada Neurônio da camada de saída
Bias
e
i
s
1 Neurônio da camada intermediária (escondida)
e
e
e
e
i
i
i
i
i
i
sY(k+1)
1 1
Y(k)
Y(k+1)
U1(k-d1)
U2(k-d2)
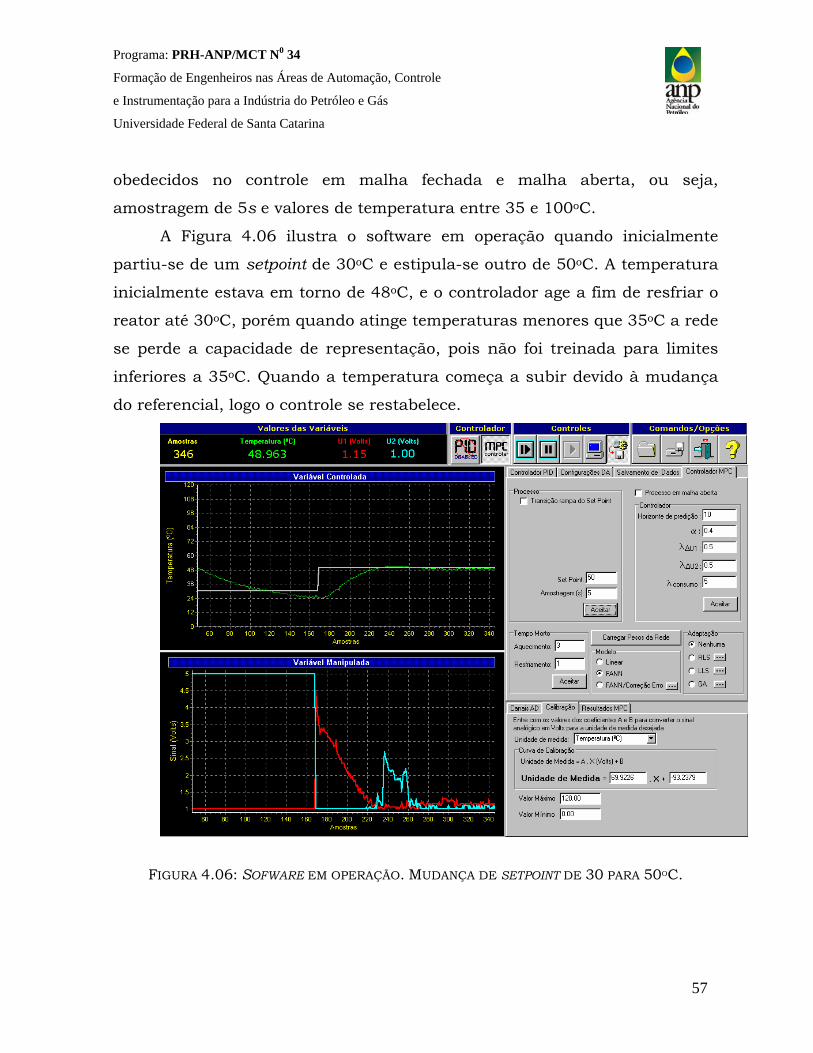
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
57
obedecidos no controle em malha fechada e malha aberta, ou seja,
amostragem de 5s e valores de temperatura entre 35 e 100oC.
A Figura 4.06 ilustra o software em operação quando inicialmente
partiu-se de um setpoint de 30oC e estipula-se outro de 50oC. A temperatura
inicialmente estava em torno de 48oC, e o controlador age a fim de resfriar o
reator até 30oC, porém quando atinge temperaturas menores que 35oC a rede
se perde a capacidade de representação, pois não foi treinada para limites
inferiores a 35oC. Quando a temperatura começa a subir devido à mudança
do referencial, logo o controle se restabelece.
FIGURA 4.06: SOFWARE EM OPERAÇÃO. MUDANÇA DE SETPOINT DE 30 PARA 50OC.
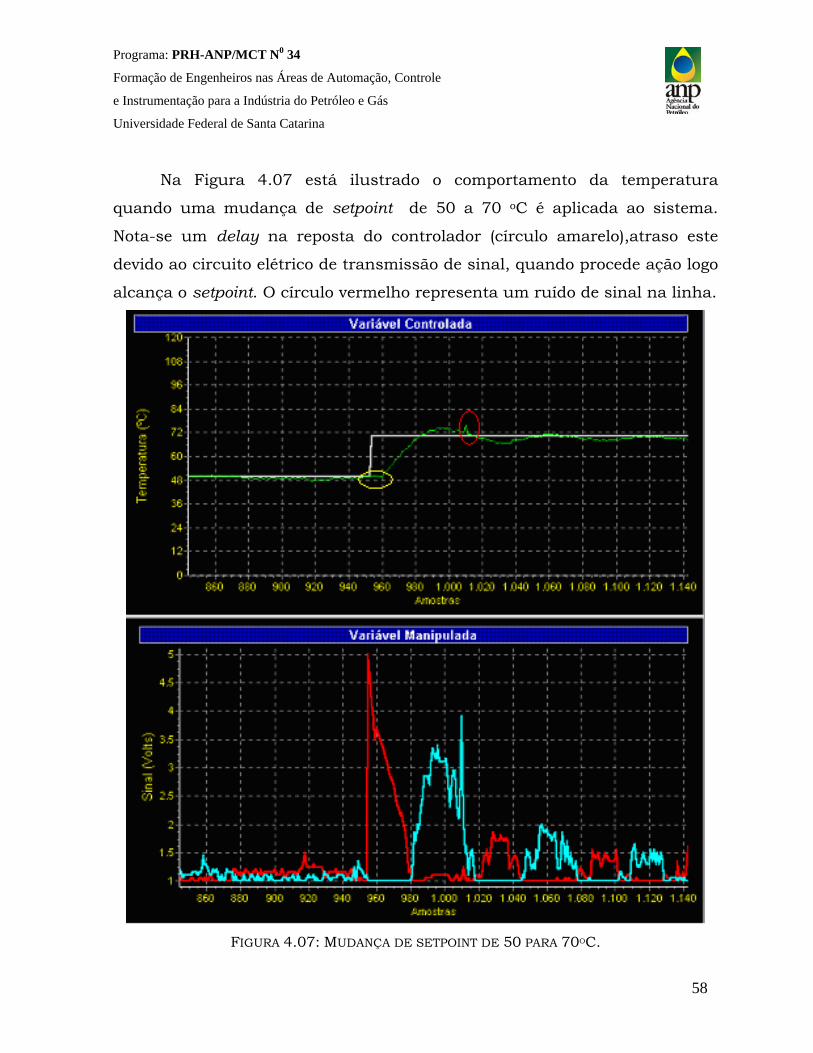
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
58
Na Figura 4.07 está ilustrado o comportamento da temperatura
quando uma mudança de setpoint de 50 a 70 oC é aplicada ao sistema.
Nota-se um delay na reposta do controlador (círculo amarelo),atraso este
devido ao circuito elétrico de transmissão de sinal, quando procede ação logo
alcança o setpoint. O círculo vermelho representa um ruído de sinal na linha.
FIGURA 4.07: MUDANÇA DE SETPOINT DE 50 PARA 70OC.
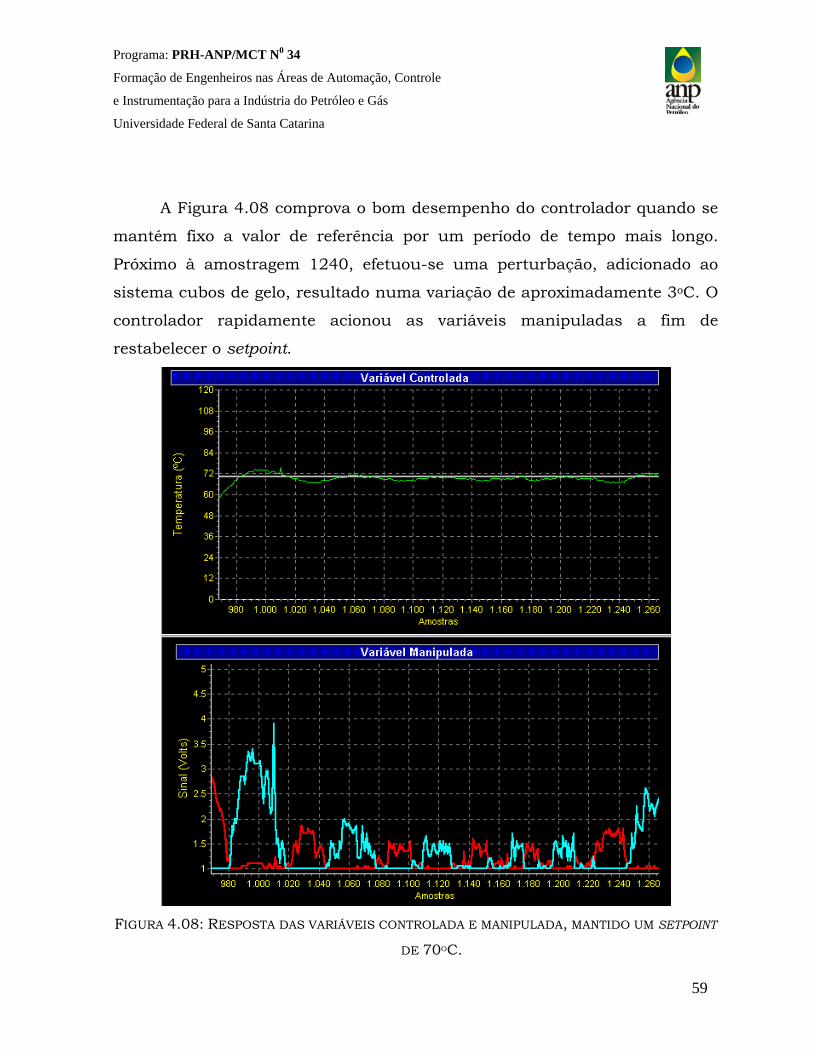
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
59
A Figura 4.08 comprova o bom desempenho do controlador quando se
mantém fixo a valor de referência por um período de tempo mais longo.
Próximo à amostragem 1240, efetuou-se uma perturbação, adicionado ao
sistema cubos de gelo, resultado numa variação de aproximadamente 3oC. O
controlador rapidamente acionou as variáveis manipuladas a fim de
restabelecer o setpoint.
FIGURA 4.08: RESPOSTA DAS VARIÁVEIS CONTROLADA E MANIPULADA, MANTIDO UM SETPOINT
DE 70OC.
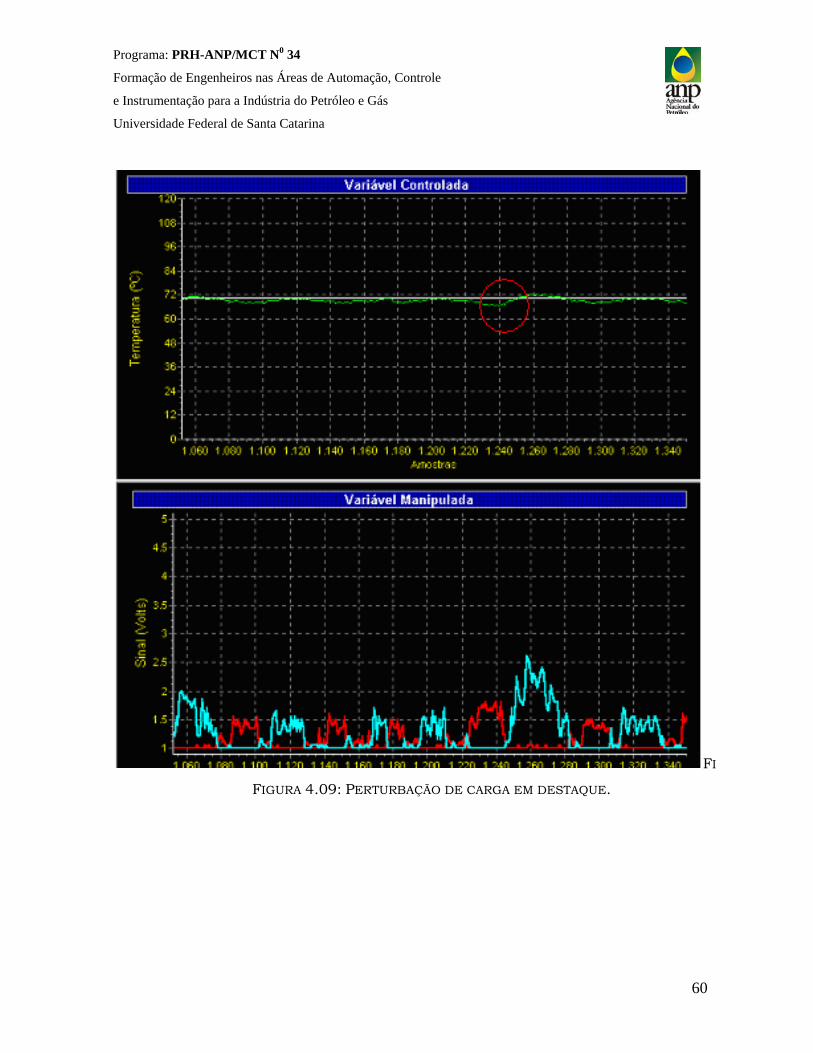
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
60
FI
FIGURA 4.09: PERTURBAÇÃO DE CARGA EM DESTAQUE.
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
61
CONCLUSÕES
• Neste trabalho foi avaliada uma estratégia de controle utilizando
técnicas combinadas de inteligência artificial, especificamente rede neural
artificial.
• Uma rede neural feedforward foi utilizada como modelo interno do
sistema de controle, levando a boas previsões do comportamento da
temperatura do reator. O algoritmo backpropagation foi utilizado para o
treinamento off-line da rede. A arquitetura que apresentou melhores
resultados foi de quatro neurônios na camada de entrada, seis na camada
escondida e um na camada de saída.
• Para o sistema em estudo, seis neurônios na camada escondida
mostraram-se adequados para tarefa exigida. Um número maior apenas
prolonga o tempo computacional do treinamento e não replica uma
correlação significativamente superior.
• O sistema de controle opera apenas nos limites de treinamento da rede
neural o que a torna falha durante a dinâmica do processo e interpéres. Para
tal faz-se necessário uma metodologia para a adaptação dos peso e bias da
rede durante a execução, ou seja, on-line, para melhor representação da
dinâmica do processo.
• Do ponto de vista da teoria de controle, a habilidade das redes neurais
de lidar com sistemas não lineares é, talvez, a mais significativa. A grande
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
62
diversidade dos sistemas não lineares é a primeira razão porque nenhuma
sistemática e teoria aplicada geral para projeto de controle não linear tenha
evoluído, ainda. Uma variedade de métodos “tradicionais” para análise e
síntese de controladores não lineares para classes específicas de sistemas
não lineares existentes: técnicas de linearização e funções descritivas, são
dois expemplos.
• Neste trabalho, portanto foi demostrado a capacidade das redes
neurais de representar um modelo não linear o qual é uma característica a
ser prontamente explorada na síntese de controladores não lineares.
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
63
REFERÊNCIAS BIBLIOGRÁFICAS
CANCELIER, A. Otimização e controle do processo de produção do poliestireno em suspensão, 2004. Tese (Doutorado em Engenharia de Produção) - Programa de Pós-graduação em Engenharia de Produção, Universidade Federal de Santa Catarina - UFSC. Florianópolis.
CANCELIER A, CLAUMANN. C. A., MACHADO, R .A. F, BOLZAN A. Uma Estratégia Não-Linear Para Controle De Temperatura De Um Tanque Encamisado Piloto
CLAUMANN, C. A. Modelagem dinâmica e controle de processos não lineares: Uma aplicação de algoritmos genéticos para treinamento de redes neurais recorrentes. 1999. Dissertação (Mestrado em engenharia química) - Departamento de Engenharia Química, Universidade Federal de Santa Catarina - UFSC, Florianópolis. GARCIA, C. E.; PRETT, D. M.; MORARI, M. Model predictive control: theory and practice - A Survey. Automatica, v. 25, no 3, p. 335-348, 1989.
HAYKIN, S.Redes Neurais – Princípios e Prática, 2001,2ª edição; Bookman. MAZZUCCO, M. M. Implementação de um controlador preditivo baseado em um modelo neural associado a um sistema especialista. 1996. Dissertação (Mestrado em engenharia química) - Departamento de Engenharia Química e Engenharia de Alimentos, Universidade Federal de Santa Catarina - UFSC, Florianópolis. MAZZUCCO, M. M, BARCIA R. M., Bolzan A. Rede Neural Backpropagation,
2001.
MAZZUCCO, M. M. Um sistema difuso para o controle de temperatura de unidades de processamento em batelada, 2003. 297f. Tese (Doutorado em Engenharia de Produção) - Programa de Pós-graduação em Engenharia de Produção, Universidade Federal de Santa Catarina - UFSC. Florianópolis.
Programa: PRH-ANP/MCT N0 34
Formação de Engenheiros nas Áreas de Automação, Controle
e Instrumentação para a Indústria do Petróleo e Gás
Universidade Federal de Santa Catarina
64
SEBORG, D. E.; EDGAR, T. F.; MELLICHAMP, D. A. Process dynamics and control. New York: John Wiley & Sons, 1989.
THAMPSON, M. L., KRAMER M. A. Modeling Chemical Processes Using Prior Knowledge and Neural Networks. AIChE Journal, Vol. 40, No 8, 1994. VIEIRA, R. A. M.; EMBIRUÇU, M.; SAYER, C.; PINTO, J. C.; LIMA, E. L. Control strategies for complex chemical processes. Applications in polymerization processes. Computers and Chemical Engineering, v. 27, p. 1307-1327, 2003.





























