Embed Size (px)
Citation preview

Desenvolvimento de um novo sistema de
aproveitamento de energia das ondas
Ricardo João Pacheco Fraga
Dissertação para obtenção do Grau de Mestre em
Engenharia Mecânica
Júri
Presidente: Professor Luís Rego da Cunha de Eça
Orientador: Professor José Maria Campos da Silva André
Co-orientador: Doutor João Carlos de Campos Henriques
Vogal: Doutor Paulo Justino
Maio 2011

I
Agradecimentos
Gostaria de expressar o meu agradecimento ao meu orientador Professor Doutor José Maria
André e ao meu Co-Orientador Doutor João Henriques por toda a disponibilidade, apoio e, sobretudo,
pelos ensinamentos, críticas e sugestões imprescindíveis para a realização desta dissertação.
Queria também agradecer aos técnicos das oficinas do departamento de Engenharia
Mecânica pela dedicação e qualidade do trabalho de execução das peças necessárias à realização
dos ensaios. São eles Norberto Marques e Pedro Alves.
Por fim, um agradecimento à minha família, em especial aos meus pais, pelo apoio
incondicional e pelas palavras sábias ao longo de todo o meu percurso académico.

II
Resumo
Este trabalho teve como principal objectivo ensaiar, em modelo reduzido, à escala 1:100 e
utilizando o canal de ondas do IST, um dispositivo concebido para o aproveitamento da energia das
ondas.
Trata-se de um sistema oscilante e flutuante, de concepção relativamente simples que
aproveita o movimento de um flutuador em todos os seus graus de liberdade, com predomínio do
movimento de translação vertical. Este conceito pretende associar às vantagens de uma energia
renovável e não poluidora a rentabilidade da produção de energia, tornando economicamente viável
a construção de centrais de energia das ondas.
Ao longo do trabalho efectua-se a caracterização física, funcional e estrutural do dispositivo
estudado e descrevem-se as principais experiências de preparação para os ensaios no canal de
ondas, levadas a cabo para testar os acelerómetros utilizados e efectuar a aquisição e tratamento do
sinal. São ainda descritos alguns aspectos relacionados com o efeito de escala, com a montagem
eléctrica e com a filtragem dos sinais obtidos.
No canal de ondas foram ensaiadas várias configurações de estados de mar e de bóia,
fazendo variar a altura e as frequências das ondas. Foram considerados e estudados os diversos
tipos de movimento da bóia e, neste trabalho são mostrados e analisados os resultados obtidos,
apresentando-se as conclusões mais significativas que deles foi possível retirar.
Apesar dos resultados obtidos apontarem claramente para a confirmação do potencial deste
novo dispositivo, há alguns pormenores que ficaram por esclarecer, apontando-se por isso algumas
perspectivas e linhas de orientação para a prossecução dos trabalhos.
Palavras-chave
Energia das ondas;
Sistemas oscilantes;
Eficiência;
Frequência de ressonância
Ensaio Experimental

III
Abstract
The aim of this work is the test, in a reduced scale model, of a floating device designed for
offshore wave energy production. The main goal of the tests is the physical understanding of the
interaction between a floating body and the flow and the assessment of its potential.
The system takes advantage of all its degrees of freedom, especially the vertical translation
movement. The energy output of the device depends not only on the wave height (significant wave
height) but also of its period (significant frequency), taking advantage of resonance.
The work consisted on the physical, functional and structural study of the device. We also
performed several experiences to test the accelerometers used and developed the acquisition and
signal processing units.
Several sea states and float configurations were tested in the wave channel by varying not
only the height and frequency of the waves, but also the weight of the ballast and the use of
vertical fins underneath the floater.
The results obtained confirm the potential of the new device. Although, there are still features
to be improved with further research.
Keywords
Wave energy;
Oscillating systems;
Efficiency;
Resonance frequency;
Experimental test;

IV
Índice
Agradecimentos I
Resumo II
Palavras-chave II
Abstract III
Keywords III
Índice IV
Lista de figuras VIError! Bookmark not defined.
Lista de tabelas IX
Capitulo 1 – Introdução 11
1.1 . Enquadramento e motivação .............................................................................................. 11
1.2 . Tecnologias de conversão de energia das ondas .............................................................. 12
1.2.1. Dispositivos costeiros 12
1.2.2. Dispositivos próximos da costa 13
1.2.3. Dispositivos afastados da costa 14
1.2.3. Dispositivo em estudo 16
1.3 . Objectivos e estrutura da dissertação ................................................................................ 18
Capitulo 2 - Caracterização do modelo 19
2.1. Análise Dimensional ............................................................................................................ 19
2.2. Flutuador .............................................................................................................................. 19
2.2.1. Fundamentos 19
2.2.2. Características do protótipo que se vai modelar 20
2.2.3. Características do modelo à escala 1:100 24
2.3. Simulação do balastro à escala 1:100 ................................................................................. 26
2.3.1. Descrição do mecanismo 26
2.3.2. Dimensionamento do solenóide 27
2.3.3. Análise estrutural 29
Capitulo 3 - Preparação da experiência 30
3.1. Introdução ............................................................................................................................ 30
3.2. Montagem eléctrica.............................................................................................................. 30
3.3. Tratamento do sinal ............................................................................................................. 32
3.3.1. Introdução 32

V
3.3.2. Filtro passa-baixo 33
3.3.3. Filtro passa-alto 35
3.4. Ensaio de precisão dos acelerómetros ............................................................................... 36
3.5. Ensaio de precisão dos velocímetros .................................................................................. 38
Capitulo 4 – Medição e análise dos resultados .................................................................................... 42
4.1. Introdução ............................................................................................................................ 42
4.2. Bóia livre .............................................................................................................................. 45
4.4. Conjunto bóia, estrutura do balastro e balastro ................................................................... 47
Capítulo 5 – Conclusões e perspectivas de trabalho futuro 599
5.1. Conclusões ........................................................................................................................ 599
5.2. Recomendações e trabalhos futuros ................................................................................... 60
Referências 61
Apêndice A 62
Corpos oscilantes em ondas 62
A.1. As ondas progressivas ........................................................................................................ 62
A.1.1. Teoria linear da ondas 63
A.1.2. Ondas reais irregulares 64
A.2. Dinâmica do corpo oscilante ............................................................................................... 65
Apêndice B
B.1 – Desenhos Técnicos dos constituintes do balastro............................................................68
B.2 - Desenhos Técnicos da estrutura para suporte e funcionamento do balastro....................71

VI
Lista de figuras
Figura 1.1 – Perfil de velocidades do vento e das ondas
Figura 1.2 – distribuição mundial do fluxo médio anual de energia das ondas profundas
Figura 1.3 - Esquema de uma CAO
Figura 1.4 - Esquema de um dispositivo por galgamento
Figura 1.5 - Placa articulada no fundo
Figura 1.6 - Esquema de um dispositivo alongado
Figura 1.7 - AWS
Figura 1.8 - Wavebob
Figura 1.9 - PowerBuoy
Figura 1.10 - AquaBuoy
Figura 1.11 - SeaREV
Figura 1.12 - Wave Dragon
Figura 1.13 -Esquema do dispositivo em estudo
Figura 2.1 - Esquema da bóia protótipo
Figura 2.2 - Tensões aplicadas na parte cilíndrica do flutuador
Figura 2.3 - Representação das forças na calote esférica
Figura 2.4 - Estrutura cúbica de corpo centrado
Figura 2.5 - Triângulo cuja hipotenusa é a diagonal maior (b) e facial (a) do cubo
Figura 2.6 - Bóia usada no ensaio à escala de 1:100
Figura 2.7 - Esquema do mecanismo simulador do balastro
Figura 2.8 - Representação do movimento da manivela
Figura 2.9 - Curvas características dos solenóides
Figura 2.10 - Esquema das forças que actuam na manivela e na parede do invólucro
Figura 3.1 - Esquema do posicionamento dos sensores de suporte
Figura 3.2 - Esquema geral da montagem eléctrica realizada
Figura 3.3 - Esquema de montagem dos acelerómetros usados
Figura 3.4 - Esquema do circuito usado para o accionamento do solenóide
Figura 3.5 - Sinal obtido sem filtro da aceleração (azul) e respectiva velocidade (verde)
Figura 3.6 - Polinómio de sexto grau
Figura 3.7 - Sinal filtrado pelo filtro passa-baixo
Figura 3.8 - sinal filtrado pelo filtro pass-alto
Figura 3.9 - Conjunto de filtros baixa-baixo (a) e passa-alto (b)
Figura 3.10 - Caixa usada no ensaio e respectivas dimensões
Figura 3.11 - Deslocamentos dos acelerómetros dentro da caixa
Figura 3.12 - Representação do pêndulo e das forças nele aplicadas
11
11
13
13
13
14
14
15
15
15
15
15
17
21
21
22
24
25
26
27
28
29
29
31
32
32
32
34
34
36
36
37
38
38
39

VII
Figura 3.13 - Sinal da aceleração vertical obtido através da eq. [4.19] e [4.20]
Figura 3.14 - Canal de ondas
Figura 3.15 - Suporte do dispositivo
Figura 3.16 - Exemplo de uma calibração feita (a): Sonda de nível utilizada (b)
Figura 4.1 - Sinal da aceleração vertical, respectiva velocidade e posição e altura das
ondas, para o ensaio da bóia livre com alturas de onda de 2 cm e
frequência 0,8 Hertz
Figura 4.2 - Alturas “ganhas” com o movimento de avanço, cabeceio e balanceio.
Figura 4.3 - Esquema ampliado da bóia numa situação de grande amplitude de
avanço cabeceio e balanceio, ou seja, os 2 casos da fig. 4.2 em
simultâneo e em três dimensões
Figura 4.4 - Factor de amplitude dinâmica de arfagem para a bóia livre.
Figura 4.5 - Comparação entre o FAD de arfagem e o FAD do balastro para a bóia
livre
Figura 4.6 - Factor de amplitude dinâmica de arfagem para o conjunto bóia e suporte
do balastro
Figura 4.7 - Comparação entre o FAD de arfagem da bóia e o FAD do balastro para o
conjunto bóia e suporte do balastro
Figura 4.8 - FAD de arfagem para conjunto bóia, estrutura e balastro
Figura 4.9 - Comparação entre o FAD de arfagem da bóia e o FAD do balastro, para o
conjunto bóia, suporte e balastro
Figura 4.10 - Comparação do FAD de arfagem entre a bóia livre, conjunto bóia e
suporte e conjunto bóia, suporte e balastro
Figura 4.11 – Comparação do FAD de avanço entre a bóia livre, conjunto bóia e
suporte e conjunto bóia suporte e balastro
Figura 4.12 – Comparação de FAD de cabeceio e balanceio entre a bóia livre, conjunto
bóia e suporte e conjunto bóia suporte e balastro
Figura 4.13 – Comparação dos FADs de arfagem entre ondas regulares e irregulares
Figura 4.14 – Comparação dos FADs de avanço entre ondas regulares e irregulares
Figura 4.15 – Comparação dos FADs de cabeceio e balanceio entre ondas regulares e
irregulares
Figura 4.16 – Evolução dos FADs de arfagem com a frequência, para ondas irregulares
de 2 e 4 cm
Figura 4.17 – Evolução dos FADs de avanço com a frequência, para ondas irregulares
de 2 e 4 cm
Figura 4.18 – Evolução dos FADs de arfagem e do balastro, para ondas irregulares de
2 e 4 cm
Figura 4.19 – Aspecto e esquema do efeito das patilhas
Figura 4.20 – FAD de arfagem máximo para cada patilha
40
41
41
41
43
44
45
46
47
47
48
49
49
50
51
51
53
53
54
54
55
55
56
57

VIII
Figura 4.21 – Evolução do FAD de arfagem para cada patilha
Figura 4.22 – Comparação entre o FAD de arfagem do balastro de 132g e de 162g
Figura 4.23 – Comparação entre o FAD de avanço do balastro de 132g e de 162g
Figura 4.24 – Comparação entre o FAD de cabeceio e balanceio do balastro de 132g e
de 162g
Figura 4.25 – Comparação entre as potências obtidas de ondas irregulares, balastro
com 132g e balastro com 162g
Figura 4.26 – Comparação entre os rendimentos obtidos de ondas irregulares, balastro
com 132g e balastro com 162g
Figura A.1 – Característica de uma onda
Figura A.2 – Espectro de potência para Hs=2m e Te=10s
Figura B 1 – Invólucro do balastro
Figura B 2 – Articulação do balastro
Figura B 3 – Manivela do balastro
Figura B 4 – Estrutura base que sustenta o balastro
Figura B.5 – Suporte do balastro
58
59
59
60
61
61
68
70
71
72
73
74
75

IX
Lista de tabelas
Tabela 2.1 – Escalas das principais características do flutuador 20
Tabela 2.2 – Características das diferentes partes do protótipo 22
Tabela 2.3 - Massa e posição do centro de massa das diferentes partes da bóia (modelo)
25
Tabela 2.4 - Constituintes do mecanismo simulador do balastro 27
Tabela 3.1 – Número de pontos (n) dos filtros usados no tratamento de sinal 37
Tabela 3.2 – Valores dos desvios e respectivos erros dos acelerómetros 38
Tabela 4.1 – Valores de potência à escala real para ondas de 2 m (2 cm no canal) 52
Tabela 4.2 – Valores de potência à escala real para ondas irregulares de 2 m (2 cm) 56
Tabela 4.3 – Dimensões das patilhas 57
Tabela 4.4 – Valores de potência para balastro de 162g 60

X

11
Capitulo 1 – Introdução
1.1 . Enquadramento e motivação
Nos dias de hoje, a energia das ondas surge como uma das mais promissoras formas
de energia, com um grande potencial renovável e não poluidor.
A energia do vento está distribuída por vários quilómetros, sendo mínima à superfície
terrestre, enquanto que a das ondas é máxima na superfície livre.
Figura 1.1 – Perfil de velocidades do vento e das ondas.
Em águas profundas (profundidade superior a 100m), as ondas podem percorrer
milhares de quilómetros com pouca perda de energia, tornando-se progressivamente regulares.
Perto da costa a potência por metro de crista da onda decresce devido à cada vez maior
interacção com o fundo, podendo, porém, ser compensada por fenómenos naturais de
refracção e difracção que provocam concentrações de energia (“hot spots”). Normalmente os
estados de mar mais energéticos (maior altura e/ou maior período) resultam da actuação de
vento de maior velocidade em maiores áreas (maior “fetch”) durante mais tempo.
Frequentemente, coexistem ondulação (“swell” - ondas geradas a grandes distâncias) e vaga
(“wind sea”-ondas geradas “localmente”) na proximidade da costa.
A potência de uma onda harmónica é proporcional ao quadrado da sua amplitude e ao
período do seu movimento. Ou seja, ondas com longos períodos (~7-10s) e grandes
amplitudes (~2m) têm fluxos de energia que excedem 40-50 kW por metro.
Figura 1.2 - Distribuição mundial do fluxo médio anual de energia das
ondas (kW/m em águas profundas) [1]

12
A energia das ondas é distribuída de forma desigual pelo globo. Elevadas actividades
das ondas são encontradas entre as latitudes de 30º e 60º, induzidas pelos ventos
permanentes de oeste que sopram nestas regiões, caso da costa ocidental da América,
Europa, África do Sul e Austrália, fig.1.2.
É possível encontrar um regime de ondas favorável à extracção de energia em locais
cujos níveis médios anuais de fluxo energético sejam superiores a 20kW/m, locais estes onde,
devido à sua latitude, se encontram ventos mais regulares, que permitem que os menores
níveis de potência sejam compensados por uma menor variabilidade do fluxo das ondas. O
recurso energético europeu é cerca de 16% do mundial, principalmente devido à costa oeste
europeia altamente energética situada no fim do longo fetch do Atlântico. Portugal, com uma
extensa linha de costa, tem condições ideais para o aproveitamento desta forma de energia.
Estima-se que entre 250 a 300km de extensão possam ser aproveitados para extracção de
energia, o que corresponde a introduzir cerca de 10 TWh/ano, ou seja, 20% do consumo
eléctrico nacional.
Todavia, o desenvolvimento tecnológico do aproveitamento da energia das ondas
possui várias dificuldades. Características como a irregularidade da amplitude, da fase e da
direcção das ondas, tornam difícil atingir o máximo de eficiência de um sistema, numa vasta
gama de frequências.
Mesmo assim, em contraste com as outras formas de energia renovável, o número de
concepções para a conversão desta forma de energia é muito grande; porém, em geral, exigem
investimentos de tal ordem que tornam o preço da energia eléctrica produzida muito superior
ao das tecnologias convencionais já existentes. Neste trabalho, pretende-se desenvolver e
testar o dispositivo proposto, com vista a uma futura aplicação comercial.
1.2 . Tecnologias de conversão de energia das ondas
As tecnologias de conversão de energia das ondas podem ser classificadas consoante
a sua localização relativamente à costa.
1.2.1. Dispositivos costeiros
Os dispositivos costeiros são fixos e construídos na orla da costa, em águas de
profundidade inferior a 20 m. Têm como vantagem serem facilmente acessíveis para instalação
e manutenção. A desvantagem, além do impacto visual e sonoro, prende-se com o facto de
terem apenas 25% a 50% do recurso energético de um dispositivo offshore, devido aos efeitos
do atrito do fundo do oceano e à rebentação das ondas de maior altura.
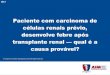
Um exemplo de um tipo de dispositivo costeiro são os sistemas de coluna de água
oscilante (CAO). Estes são constituidos por três componentes principais: a câmara, a turbina e
o gerador, fig.1.3. A câmara está semi-submersa, é aberta na base e contém ar na parte
superior. A onda faz subir o nível de á
pela turbina. Quando o nível de água desce, o ar é aspirado, passando novamente e no sentido
contrário, pela turbina. As turbinas são projectadas de forma a terem sempre o mesmo sent
de rotação, independentemente do sentido do escoamento.
da turbina, produzindo assim electricidade.
Outro exemplo são os dis
ondas através da circulação da ág
transformando energia potencial graví
que recolhe a onda incidente e um reservatório que alimenta a turbina.
1.2.2. Dispositivos próximos
Os dispositivos near
ronda os 10-25 metros pois a essa profundidade as particulas de água descrevem órbitas
elípticas com componente horizontal de velocidade dominante. A placa articulada n
um exemplo deste tipo de dispositivo. O movimento de rotação da placa vertical em torno de
um eixo horizontal junto ao fundo, acciona mecanismos hidráulicos que bombeiam óleo sob
pressão para turbinas ligadas ao gerador.
13
z subir o nível de água da câmara, comprimindo o ar e forçando
pela turbina. Quando o nível de água desce, o ar é aspirado, passando novamente e no sentido
contrário, pela turbina. As turbinas são projectadas de forma a terem sempre o mesmo sent
de rotação, independentemente do sentido do escoamento. O gerador é accionado pelo rotor
da turbina, produzindo assim electricidade.
Outro exemplo são os dispositivos por galgamento, fig.1.4. Estes recolhem energia das
ondas através da circulação da água por turbinas (como nas centrais hidroeléctricas),
formando energia potencial gravítica em energia eléctrica. Estes sistemas têm uma rampa
que recolhe a onda incidente e um reservatório que alimenta a turbina.
próximos da costa
Os dispositivos near-shore encontram-se geralmente em águas cuja profundidade
25 metros pois a essa profundidade as particulas de água descrevem órbitas
elípticas com componente horizontal de velocidade dominante. A placa articulada n
um exemplo deste tipo de dispositivo. O movimento de rotação da placa vertical em torno de
um eixo horizontal junto ao fundo, acciona mecanismos hidráulicos que bombeiam óleo sob
pressão para turbinas ligadas ao gerador.
gua da câmara, comprimindo o ar e forçando-o a passar
pela turbina. Quando o nível de água desce, o ar é aspirado, passando novamente e no sentido
contrário, pela turbina. As turbinas são projectadas de forma a terem sempre o mesmo sentido
O gerador é accionado pelo rotor
1.4. Estes recolhem energia das
ua por turbinas (como nas centrais hidroeléctricas),
sistemas têm uma rampa
se geralmente em águas cuja profundidade
25 metros pois a essa profundidade as particulas de água descrevem órbitas
elípticas com componente horizontal de velocidade dominante. A placa articulada no fundo é
um exemplo deste tipo de dispositivo. O movimento de rotação da placa vertical em torno de
um eixo horizontal junto ao fundo, acciona mecanismos hidráulicos que bombeiam óleo sob

1.2.3. Dispositivos afastados da costa
Encontram-se em águas profundas e beneficiam de um regime de ondas mais
energético. Como o máximo de energia encontra
sua grande maioria, corpos oscilantes, com
extensão maior que o seu comprimento característico
rendimento destes sistemas por ajuste da energia
A grande distância ao fundo do mar, o afastamento da costa e
águas do mar (devido às marés) são dificuldade
instalação, manutenção e projecto, pois é dispendioso fixar os dispositivos ao fundo do oceano
através de amarrações e transportar a energia para ter
Os primeiros projectos de
dispositivos alongados (como é o caso do “Pelamis” desenvolvido pela
Devido à sua dimensão e orientação perpendicular à frente de onda, a ondulação move
diferentemente as suas várias partes, conforme estão sujeitas à acção de uma c
crista, fig.1.6. Esta diferente solicitação provoca deslocamentos angulares nos nós, onde
actuam ou geradores eléctricos ou em cilindros hidráulicos.
O AWS (“Archimedes Wave Swing”),
submerso. É ancorado ao fundo e contém uma câmara
cilindro superior. Uma onda incidente provoca variações na pressão exterior e,
consequentemente, oscilações verticais do flutuador, as quais accionam directamente um
gerador ou um cilindro hidráulico para extrair energia.
Recentemente, tem-se vindo a apostar mais nos sistemas oscilantes de simetria axial
(Axisymmetrical Point Absorbers)
energia das ondas em todas as direcções por força dos movimentos das ondas na superfície
da água ou perto dela. Este
comparados com os comprimento
(point absorbing) realçam a capacidade
do dispositivo. Por analogia com o mesmo efeito nas ondas de rádio (i.e. acústica), este efeito
também se designa efeito de antena.
14
afastados da costa
se em águas profundas e beneficiam de um regime de ondas mais
energético. Como o máximo de energia encontra-se à superficie, os sistemas
sua grande maioria, corpos oscilantes, com a vantagem de captar a energia da onda numa
o seu comprimento característico. Mesmo assim, é possível melhorar o
por ajuste da energia extraída a cada estado do mar
ande distância ao fundo do mar, o afastamento da costa e a variação do nível das
águas do mar (devido às marés) são dificuldades de projecto a que acrescem os custos de
instalação, manutenção e projecto, pois é dispendioso fixar os dispositivos ao fundo do oceano
através de amarrações e transportar a energia para terra.
Os primeiros projectos de extracção de energia das ondas offshore
dispositivos alongados (como é o caso do “Pelamis” desenvolvido pela Pelamis Wave Power
Devido à sua dimensão e orientação perpendicular à frente de onda, a ondulação move
erentemente as suas várias partes, conforme estão sujeitas à acção de uma c
. Esta diferente solicitação provoca deslocamentos angulares nos nós, onde
actuam ou geradores eléctricos ou em cilindros hidráulicos.
“Archimedes Wave Swing”), fig.1.7, é um exemplo de um dispositivo
ancorado ao fundo e contém uma câmara-de-ar pressurizada que sustenta o
cilindro superior. Uma onda incidente provoca variações na pressão exterior e,
sequentemente, oscilações verticais do flutuador, as quais accionam directamente um
gerador ou um cilindro hidráulico para extrair energia.
se vindo a apostar mais nos sistemas oscilantes de simetria axial
Point Absorbers). São normalmente estruturas flutuantes
energia das ondas em todas as direcções por força dos movimentos das ondas na superfície
da água ou perto dela. Estes sistemas oscilantes são de pequenas dimensões
comprimentos de onda típicos. As características de absorção pontual
a capacidade de absorver energia numa área superior às dimensões
do dispositivo. Por analogia com o mesmo efeito nas ondas de rádio (i.e. acústica), este efeito
signa efeito de antena.
se em águas profundas e beneficiam de um regime de ondas mais
se à superficie, os sistemas offshore são, na
energia da onda numa
possível melhorar o
cada estado do mar.
iação do nível das
que acrescem os custos de
instalação, manutenção e projecto, pois é dispendioso fixar os dispositivos ao fundo do oceano
offshore foram os
Pelamis Wave Power).
Devido à sua dimensão e orientação perpendicular à frente de onda, a ondulação move
erentemente as suas várias partes, conforme estão sujeitas à acção de uma cava ou de uma
. Esta diferente solicitação provoca deslocamentos angulares nos nós, onde
dispositivo offshore
ar pressurizada que sustenta o
cilindro superior. Uma onda incidente provoca variações na pressão exterior e,
sequentemente, oscilações verticais do flutuador, as quais accionam directamente um
se vindo a apostar mais nos sistemas oscilantes de simetria axial
que absorvem a
energia das ondas em todas as direcções por força dos movimentos das ondas na superfície
de pequenas dimensões quando
de absorção pontual
uma área superior às dimensões
do dispositivo. Por analogia com o mesmo efeito nas ondas de rádio (i.e. acústica), este efeito

15
Os modelos de tipo bóia funcionam como pequenos sistemas oscilantes e são
normalmente de simetria axial. Exemplos comuns desta categoria são o ‘Wavebob’, o
‘PowerBuoy’ e o ‘Aquabuoy’.
O ‘Wavebob’ usa a sua oscilação vertical para actuar em pistões hidráulicos que
bombeiam óleo pressurizado para uma unidade de geradores, fig.1.8. Tem também capacidade
de lidar com a variabilidade no tamanho das ondas através de um sistema de amortecimento
que responde de acordo com a altura, energia e frequência das ondas.
O dispositivo ‘PowerBuoy’ é constituído por uma bóia submersa a cerca de 1 m da
superfície do mar, com uma estrutura cilíndrica para aproveitar o movimento induzido pelas
ondas, fig.1.9. A bóia é fixa ao fundo do mar onde se encontra instalado o gerador eléctrico. A
bóia é equipada com sensores para a monitorização contínua do rendimento dos subsistemas
e do ambiente marítimo na vizinhança.
O sistema ‘AquaBuoy’ é constituído por uma bóia circular, fixa por uma amarração
flexível que permite o seu movimento vertical, fig.1.10. Este movimento relativo entre a bóia e a
massa de água amortecedora é transferido por um cilindro, do tubo de aceleração para um
sistema de conversão localizado no corpo do flutuador.
Exemplos de sistemas offshore de simetria não axial são o SeaREV e o Wave Dragon.
O ‘SeaREV’, fig.1.11, é um sistema totalmente fechado que contém no seu interior um sistema
semelhante a um pêndulo, cujo movimento de rotação oscilatório é convertido em energia
hidráulica por um sistema óleo-hidráulico de alta pressão.
O ‘Wave Dragon’ é basicamente um dispositivo de galgamento em que o reservatório é
flutuante e sobrelevado relativamente ao nível médio da superfície livre do mar, fig.1.12. Para
aumentar o desnível de galgamento existem dois reflectores parabólicos, colocados a montante
da rampa que nela concentram a onda incidente.
Figura 1.8 – Wavebob (www.unenergy.org)
Figura 1.9 – PowerBuoy (www.rechargenews.com)
Figura 1.10 – AquaBuoy (www.contitech.de)

16
Existem também bóias CAO (OEBuoy, Sperboy, MRC). São dispositivos flutuantes
ligados a uma coluna oscilante de água submersa.
Estes sistemas actuais não conseguem ser suficientemente baratos, principalmente
devido aos esforços a que ficam sujeitos. A velocidade típica dos seus componentes é baixa
porque a amplitude típica das ondas marítimas é da ordem de 1 m e o período cerca de 10 s.
Para uma determinada potência, as forças (ou binários) variam inversamente com a velocidade
linear (ou de rotação), de modo que a estrutura tem de ser dimensionada para aguentar
grandes esforços, o que implica grandes investimentos.
Outro problema dos dispositivos que usam sistemas hidráulicos são as altas pressões
a que estão sujeitos. Um sistema hidráulico sujeito a pressões de centenas de bar e com
êmbolos de diâmetro muito grande tem um caudal de fugas bastante significativo por ciclo e as
tubagens metálicas sofrem deformações elásticas bastante acentuadas, reduzindo o seu
rendimento. Como os volumes bombeados por ciclo são relativamente pequenos, estas perdas
são elevadas.
1.2.3. Dispositivo em estudo
Trata-se de um dispositivo offshore apropriado para a exploração em larga escala do
recurso energético das ondas. É constituído por um flutuador que se comporta como um
oscilador forçado sujeito a um movimento oscilatório com 6 graus de liberdade (3 translações e
3 rotações), onde predomina o movimento de translação vertical. A produção energética
depende da altura das ondas (altura significativa ��), mas também do espectro de períodos (ou
frequências) das ondas. Como em qualquer dispositivo de aproveitamento de energia das
ondas, o objectivo é tirar partido dos fenómenos de ressonância, ajustando a frequência própria
de oscilação do flutuador ao período representativo das ondas (�� - período de energia).
Na fig.1.13 apresenta-se esquematicamente o dispositivo em estudo.
Figura 1.11 – SeaREV(www.energies2demain.com)
Figura 1.12 - Wave Dragon (www.globalwaterandpower.com)

17
Figura 1.13 - Esquema do dispositivo em estudo.
O flutuador contém no seu interior um cabo enrolado num tambor, um motor eléctrico
(M), uma embraiagem (E), uma engrenagem multiplicadora (G) ligada a um gerador e, caso
seja necessário, um volante de inércia. O cabo liga o flutuador a uma massa de
aproximadamente 70 toneladas, designada por balastro. O balastro possui um travão que,
quando accionado, o sustém numa estrutura presa ao fundo do mar.
O movimento vertical ascendente do flutuador é transmitido ao balastro, fazendo com
que este suba. Quando o flutuador desce, o travão do balastro é accionado impedindo que este
desça, e o cabo é enrolado no tambor por acção do motor eléctrico. Após uma série de
oscilações do flutuador, o balastro sobe até uma certa posição, onde, depois, é destravado e
cai. À medida que o balastro cai, o cabo, ao desenrolar-se no tambor, provoca a rotação deste.
A embraiagem é então accionada, produzindo energia através do gerador.
Este tipo de concepção do dispositivo elimina os elementos de estrutura sujeitos à
compressão (a nova configuração é feita de membranas e cabos que só trabalham à tracção) e
reduz substancialmente o custo do equipamento por dispensar sistemas hidráulicos.
A não existência de amarrações a ligar o flutuador ao fundo marinho é uma vantagem,
pois as amarrações retiram energia ao flutuador. Os cabos enrolados em tambores ou polias
permitem ao flutuador tirar partido dos movimentos de cabeceio e avanço, desde que os cabos
estejam fora do eixo vertical de simetria da instalação. Esta configuração permite acumular
energia ao longo de várias ondas e, se estiver organizada em parque com conjuntos de várias
unidades, pode produzir electricidade a uma potência constante. Deste modo, recorrendo a
este tipo de concepção, espera-se que seja economicamente viável a construção de centrais
de energia das ondas

18
1.3 . Objectivos e estrutura da dissertação
O presente trabalho tem como objectivo simular uma nova configuração de central de
energia das ondas [15], num modelo à escala 1:100, no tanque de ondas do IST. Pretende-se
determinar o movimento oscilatório do flutuador e compreender a sua interacção com as
ondas, controlando e melhorando a sua posição ao longo do tempo, segundo algumas
variantes de projecto, de forma a aumentar a sua eficiência. Pretende-se também determinar
as condições de mar mais favoráveis ao seu bom desempenho e simular a influência do
balastro sobre o flutuador.
Outra vertente do trabalho foi o projecto e concepção do modelo à escala 1:100. O
projecto engloba o dimensionamento do balastro e calibração do flutuador, tendo em conta as
relações de escala das suas propriedades físicas, a montagem e aquisição de dados dos
acelerómetros colocados no flutuador, bem como o projecto de accionamento do solenóide.
A dissertação está agrupada em 5 capítulos. O primeiro capítulo é a introdução como
uma breve contextualização do tema. Mostra-se alguns exemplos de dispositivos de extracção
de energia das ondas existentes e descreve-se o dispositivo em estudo. No segundo capítulo é
feita a caracterização física, funcional e estrutural do dispositivo. No terceiro capítulo estão
descritas as principais experiências de preparação para os ensaios no canal de ondas, levadas
a cabo para testar os acelerómetros utilizados e efectuar a aquisição e tratamento do sinal. São
ainda descritos alguns aspectos de montagem da experiência à escala 1:100. No capítulo 4
são mostrados e analisados os resultados obtidos para todos os estados de mar e
configurações do dispositivo ensaiados. Por fim, no quinto e último capítulo são apresentadas
as conclusões e algumas perspectivas de trabalhos futuros.

19
Capitulo 2 - Caracterização do modelo
2.1. Análise Dimensional
O modelo a projectar deve respeitar dimensionalmente as características do protótipo.
Pode-se fazer a distinção entre as variáveis dependentes e independentes:
��, �, , , �� = � ��, ℎ, �, �, �, �� Eq. [2.1]
Recorrendo ao teorema de Buckingham é possível reduzir o número de variáveis
independentes para três variáveis (adimensionais).
���ℎ��/� , �ℎ , ��ℎ��/� , ℎ �� , �ℎ!/��� /� = � " �ℎ�/��#�/� , �ℎ , �ℎ $ Eq. [2.2]
Se se mantiverem invariáveis os grupos adimensionais que figuram do lado direito da Eq. [2.2], manter-se-ão automaticamente invariáveis os grupos adimensionais do lado esquerdo
e garantir-se-á a semelhança dinâmica da experiência à escala adoptada.
O número de Reynolds do modelo é inferior em muitas ordens de grandeza ao número
de Reynolds do protótipo, de modo que os efeitos viscosos estão fora de proporção.
2.2. Flutuador
2.2.1. Fundamentos
O modelo usado no canal de ondas deverá respeitar a semelhança cinemática e
dinâmica entre o modelo e o protótipo. Para isso, é necessário que todas as escalas de
comprimentos (nomeadamente escalas de altura de onda, geometria do flutuador e
comprimento de onda), momento de inércia, massa e centro de massa sejam iguais.
Sendo a escala de comprimentos 1:100, apresenta-se na tabela 2.1 as relações de
escala para o flutuador.

20
Grandeza Proporcionalidade Factor de escala
Comprimento % 1:102
Massa & ∝ % 1: 10*
Tempo + ∝ √% 1: 10
Aceleração - ∝ %/+� 1: 1
Força ∝ & × - 1: 10*
Velocidade / ∝ %/+ 1: 10
Volume ∝ % 1: 10*
Área 0 ∝ %� 1: 101
Momento de inércia 2 ∝ & × %� 1: 10�3
Energia 4 ∝ & × %�/+� 1: 105
Potência � ∝ 4/+ 1: 10!
Tabela 2.1 – Escalas das principais características do flutuador
Quanto mais reduzido é o modelo, mais difícil se torna simular adequadamente as forças
aplicadas e medir com rigor os tempos, velocidades e acelerações do flutuador.
A escala de massa volúmica para a água é aproximadamente 1:1. No entanto como a
água usada no tanque de ondas não é água salgada há um pequeno desvio a considerar.
Tomando a massa volúmica da água doce como 998 kg/m3 e a da água salgada como 1025
kg/m3, tem-se um desvio de escala de aproximadamente 2,63 %.
Como o canal de ondas tem uma largura cinco a seis vezes superior ao diâmetro do
flutuador a influência das paredes do tanque no movimento do flutuador é significativa. Deste
modo, há que ter em conta a reflexão provocada pelas paredes ao interpretar os resultados
experimentais.
2.2.2. Características do protótipo que se vai modelar
Vamos considerar o caso em que o flutuador é constituído por uma membrana de aço
(7860 kg/m3), cuja parte submersa tem a forma de um cilindro de 15 metros de diâmetro e 7,5
m de altura, ligado inferiormente a uma semi-esfera com o mesmo diâmetro. No seu interior
estará água doce (998 kg/& ) até um determinado nível (ℎ6) de modo que a parte cilíndrica
fique 7,5 metros submersa (ℎ�789�:�6), fig.2.1. A pressão interna (água doce) é superior à
pressão externa (água salgada) de uma diferença ∆<.

21
A espessura da membrana de aço foi calculada de forma a resistir à diferença de
pressão e, ao mesmo tempo, ser o mais fina possível, para assegurar um peso reduzido.
É necessário analisar os esforços tanto na parte semiesférica como na parte cilíndrica
e ver qual delas é a crítica.
Figura 2.2 – Tensões aplicadas na parte cilíndrica do flutuador
Considerando um ∆< de 105 Pa, uma tensão de cedência para o aço de 450 MPa e um
coeficiente de segurança de 10, as forças por unidade de geratriz para o caso do cilindro são:
� = ∆< × ��
⇔ > = ∆< × �� × 102 × ?@�A 4B. [2.3] � = 2. > × ?D
� = ∆< × E FGG1
⇔ > = ∆< × �� × 104 × ?@�A 4B. [2.4] � = E�� × > × ?I
Figura 2.1 – Esquema da bóia (protótipo).
?D ?I
J� J�

22
O valor obtido para a espessura da casca cilíndrica foi de 0,0001(3) metros.
Figura 2.3 – Representação das forças na calote esférica
Devido à simetria da semi-esfera, tem-se que ?D = ?I. O valor da espessura da casca
semi-esférica é obtido da Eq.[2.4 ] e é de 0,00008(3) metros. Conclui-se, assim, que a parte
cilíndrica é crítica em termos estruturais. Assim, arredondando às centésimas, por excesso,
considerou-se uma espessura de 0,01 m.
Na tabela 2.2 estão as expressões usadas da massa (&K), posição do centro de
gravidade (LK) e momentos de inércia das diversas partes da bóia, de modo a facilitar o cálculo
da massa e da posição do centro de massa do flutuador do protótipo. Devido à axissimetria da
bóia, os valores de 2MN , 2MO , 2NM , 2NO , 2OM , 2ON são nulos e 2MM = 2NN. Na tabela, a designação dos
elementos do corpo está de acordo com a nomenclatura da fig.2.1.
Corpo PQ RQ STTQ SUUQ/VVQ 1 23 EWX� − X� Z�6ç\ X� + ℎ + X�2 12 ^ X�WX�1 + 2X��X�� − 3X�1ZWX� − X� Z
32 ^ WX�� − X��ZWX� − X� Z . _14 WX�� + X��ZX� + X� 3 ` 2 23 EWX� − X� Z�6ç\
X�2 32 ^ WX�� − X��ZWX� − X� Z . _14 WX�� + X��ZX� + X� 3 `
3 EWX�� − X��Zℎ × �6ç\ X� + ℎ/2 12 &WX�� + X��Z
14 &WX�� + X��Z + 112 &ℎ�
4 EX��ℎ6�DGa X� + ℎ6/2 12 &X��
14 &X�� + 112 &ℎ6�
5 23 EX� �DGa X� − 3X�8 25 &X��
15 &X��
Tabela 2.2– Características das diferentes partes do protótipo.
Para determinar ℎ6 iguala-se o peso da bóia (contando com a água doce e com cerca
de 2000 Kg para a maquinaria) à impulsão causada pela água salgada. Considera-se a
densidade da água salgada igual a 1025 kg/m3.
�def = 2&<gheãf Eq. [2.5] ⇔ � × [�∑ K̂1Kk� � + 2000] = � × �DGalmn × fháp76 A��q\@6A\ Eq. [2.6]
D2
J�

23
sendo o volume da água deslocada dado por:
fháp76 A��q\@6A6 = 23 EX� + EX�� × ℎ�78 Eq. [2.7]
Substituindo as equações das massas e do volume deslocado na eq.[2.6] e resolvendo
em ordem a ℎ6 , chega-se ao valor de 7,394 m.
A massa total da bóia, incluindo o peso da maquinaria (gerador, etc.) que se encontra
no seu interior, é:
&t = u &K1
Kk� Eq. [2.8] ⇔ &t = 2 264,16 ton
A posição do centro de massa é dada por:
yp = u yK × &K&t\t6q1
Kk� Eq. [2.9] ⇔ yp = 8,67 m
Se os momentos de inércia forem calculados em relação ao mesmo ponto, o momento
de inércia resultante do protótipo é igual ao somatório dos momentos de inércias das suas
partes constituintes. Chegou-se ao seguinte valor para o momento de inércia em torno do eixo
dos zz:
2OO = u 2OO|1
Kk� Eq. [2.10] ⇔ 2OO = 61 904 ton. m�
Para o cálculo dos momentos de inércia segundo xx e yy em relação ao seu centro de
massa, foi necessário recorrer ao teorema dos eixos paralelos, onde:
2MM = 2MM` + & �~�� + y̅������������ Eq. [2.11] 2NN = 2NN` + &��̅� + y̅�� Eq. [2.12]
Note-se que os valores de ~� e �̅ são nulos, devido à axissimetria do corpo. Sendo yK̅ = �yp − yK�, o momento de inércia segundo xx e yy do protótipo é dado por:
2MM/NN = uW2MM|/NN| + &KyK̅�Z1Kk� Eq. [2.13]

24
⇔ 2MM/NN = 61 856 ton. m�
2.2.3. Características do modelo à escala 1:100
O modelo usado é em acrílico (�6@: = 1 190 kg/m3) e, tal como se prevê que seja o
protótipo, é composto por um cilindro, ao qual na parte inferior está acoplada uma semi-esfera
com as dimensões à escala. Colocaram-se esferas de chumbo (��8 = 11 340 kg/m3 e raio ��8 = 1,25 mm) para que a massa fique à escala, com o cuidado de as dispor de forma que o
centro de massa fique no sítio certo. Devido aos interstícios entre as esferas de chumbo,
achou-se conveniente contabilizá-las segundo uma estrutura cúbica de corpo centrado, fig.2.4.
Cada volume cúbico é ocupado pelo equivalente a duas esferas de chumbo. Sabendo
que a diagonal do cubo é 4��8, calcula-se o lado do cubo, considerando a diagonal facial d.
�� = h� + h�
(a) ⇔ � = √2h 4B[2.12]
(b) �4 × ��8�� = h� + W√2hZ� ⇔ h = 1√ ��8 4B[2.13]
De seguida determina-se a fracção média de sólido no volume total:
= fhg&d �-e de�d�-e �d �ℎg&�ffh&d �f �g�f = 43 E��8 × 2" 4√3 ��8$ Eq. [2.14]
obtendo-se o valor de 0,68. Daqui resulta a massa volúmica efectiva média do chumbo de
7711kg/m3 ��̅�8�.
Figura 2.4 - Estrutura cúbica de corpo centrado.
Figura 2.5 – Triângulo cuja hipotenusa é a diagonal maior (b) e facial (a) do cubo

25
As esferas de chumbo foram colocadas em forma de anel com a quantidade adequada
de modo a que a massa do modelo fosse, à escala, o mais próxima possível da massa do
protótipo. O anel de esferas de chumbo ficou então com raio exterior (Rext) de 6,2 cm, raio
interior (Rint) de 3,15 cm e 2 cm de altura (hc). O modelo foi pesado numa balança DSN30 de
precisão ±1 grama. O valor medido foi de 2264 gramas.
Para facilitar o cálculo do centro de massa e momentos de inércia, divide-se a bóia nas
suas várias partes tal como se fez para o protótipo. O raio da bóia é de 15 cm, com espessura
de 0,3 cm, a altura da parte cilíndrica é de 22 cm e a espessura da tampa é de 0,2 cm. O anel
das esferas de chumbo foi colocado a uma altura correspondente a 7,5 cm da origem do eixo,
como representado na fig.2.6.
Figura 2.6 – Bóia usada no ensaio à escala 1:100
Corpo PQ TQ STTQ SUUQ/VVQ Semi-
esfera (5)
23 EWX� − X� Z�6@: X�2
14 ^ X�WX�1 + 2X��X�� − 3X�1ZWX� − X� Z 32 ^ WX�� − X��ZWX� − X� Z . _14 WX�� + X��ZX� + X� 3 `
Cilindro (6) EWX�� − X��Zℎ. �6@: X� + ℎ2 12 &WX�� + X��Z
14 &WX�� + X��Z + 112 &ℎ�
Tampa (7) EX�� × h × �6@: X� − h2 + ℎ 12 &X��
14 &X�� + 112 &h�
Chumbos
(8)
EWX�Mt�− XK�t��ℎ@ . �̅�8
z�� 12 &WX@�Mt� + X@K�t�Z
14 &WX@�Mt� + X@K�t�Z + 112 &ℎ@�
Tabela 2.3 - Massa e posição do centro de massa das diferentes partes da bóia (modelo) referenciadas na fig.2.6.
Substituindo a informação da tabela 2.3 nas equações [2.9], [2.10] e [2.11] obtém-se os
valores do centro de massa e momentos de inércia do modelo. O centro de massa obtido foi de
9,8 cm, que, à escala, representa um erro relativo ao protótipo de 13 % para mais. O momento
de inércia 2OO obtido foi de 57 176 g.cm2, valor com um erro relativo ao protótipo de 7,6 % para
5
6
7
8
z
x y

26
menos e, por fim, o momento de inércia 2MM/NN obtido para o modelo foi de 73 402 g.cm2, que, à
escala, representa um erro relativo ao protótipo de 18,7 % para mais.
O erro maior que se verifica em relação ao momento de inércia 2MM/NN é devido à altura
da parte cilíndrica da bóia do modelo, e pode influenciar principalmente os valores de cabeceio
e balanceio da bóia no canal de ondas.
2.3. Simulação do balastro à escala 1:100
A imposição de forças sobre o modelo à escala 1:100 apresenta alguns desafios. Como
os tempos característicos são pequenos, torna-se difícil a aplicação rigorosa de forças com
variações tão rápidas. No modelo à escala 1:100 torna-se impossível simular o sistema
constituído pelo tambor, motor eléctrico, embraiagem, engrenagens e motor eléctrico.
2.3.1. Descrição do mecanismo
Para simular o efeito da força que o balastro exerce sobre a bóia foi necessário
proceder à construção de um mecanismo que permitisse sujeitar a bóia à força correcta de
uma forma controlada, pois o peso do balastro só se faz sentir nos movimentos ascendentes
da bóia. Para que a força seja a correcta, o peso do balastro tem de estar à escala e, usando
dois solenóides em sentidos opostos, foi possível controlar a força, manipulando a corrente
eléctrica. O mecanismo está representado na fig.2.7.
Os fios de nylon estão ligados à bóia e deslizam nas cavidades laterais da cápsula.
Assim, quando a bóia sobe, injecta-se corrente no solenóide e este produz uma força
magnética que faz deslocar a peça de conexão para cima, fazendo com que as alavancas
pressionem os fios de nylon. Deste modo consegue-se que todo o mecanismo fique preso aos
fios e, consequentemente, à bóia, ficando esta sob o efeito do peso do balastro. Para o
mecanismo se desprender dos cabos, basta cortar a corrente eléctrica ao solenóide em uso, e
Figura 2.7 – Esquema do mecanismo simulador do balastro.

27
injectá-la no solenóide que está orientado no sentido oposto, produzindo assim uma força
simétrica à primeira.
Na tabela 2.4 estão indicadas as massas das peças que constituem o mecanismo.
Peças Massa (gramas) Material
Solenóide 20 Bronze
Peça de conexão 1.5 Alumínio
Alavanca 1.1 Alumínio
Cápsula 23 Perspex
Tabela 2.4 – Constituintes do mecanismo simulador do balastro
Os materiais e as dimensões das peças foram escolhidos de modo a que a massa
estivesse à escala do balastro real. O peso total do mecanismo é de aproximadamente 132
gramas, não contabilizando os efeitos da impulsão.
&�� = &:�6q − �àp76 . fh 4B[2.15]
Sendo o volume total do mecanismo aproximadamente igual a 65 064 && , obteve-se
uma massa efectiva de 54,8 gramas, através da eq.[2.15].
Como se pode constatar, este valor, à escala, é relativamente próximo do valor da
massa do balastro do protótipo (40 toneladas).
2.3.2. Dimensionamento do solenóide
Foi possível saber qual o máximo que o eixo do solenóide se teria de mover para
prender os fios, numa rápida análise de deslocamentos. Para isso, considerou-se o caso
extremo em que a alavanca entra quase totalmente na cavidade (2 mm).
Assim, como os triângulos são semelhantes, temos:
Figura 2.8 – Representação do movimento da manivela.

28
%�= %1% . %� 4B. [2.16]
Sendo que %1 corresponde aos 0,5 mm do deslocamento da manivela e que as
restantes medidas são as cotadas no desenho da alavanca apresentado no anexo [B], o valor
obtido para %� foi de 0,25 milímetros.
Se o solenóide for constituído por N espiras circulares e se o seu comprimento for L, a
intensidade do campo magnético no seu interior é dada pela expressão:
� = µ.�.KI �T� Eq. [2.17]
Sendo a força electromagnética por ele produzida igual a:
����9 = 2Jh. ��� ��� Eq. [2.18]
Utilizou-se o solenóide «Series 151 Compact Push-Pull» com uma potência de 2 watts
e com as curvas características representadas na fig.2.9.
.
Pelo gráfico anterior, através da curva do solenóide de 2W, é possível obter o valor da
força que o solenóide aplica a curso nulo. O valor é de aproximadamente 550 gramas força, ou
seja, cerca de 5.4 N.
Figura 2.9 – Curvas características dos solenóides

29
2.3.3. Análise estrutural
Nesta secção verifica-se se a força produzida pelo solenóide é suficiente para fixar o
mecanismo aos fios de nylon. A fig.2.10 representa as forças aplicadas a uma das alavancas.
Sendo:
�� – Metade da força aplicada pelo
solenóide ( 2.7 N ). �� – Força do fio sobre a alavanca. X��� – Reacção vertical no apoio. X��� – Reacção horizontal no apoio. � − Força da alavanca sobre o fio. �1 − Força na parede sobre o fio.
Resolvendo a equação dos momentos em relação ao apoio obtém-se:
u �̂ = 0 ⇔ �� = �� . %�% Eq. [2.19]
Chega-se assim ao valor de 1,327 N para a força ��. De notar que as forças � e �1 têm
a mesma intensidade que a força ��, sendo que �1, também faz pressão sobre o fio.
Para que a força seja suficiente para prender todo o mecanismo, a força de atrito terá
de ser maior ou igual a metade do peso próprio efectivo (32,4 gramas), visto que temos duas
alavancas. Sendo as forças � e �1 as forças que actuam no fio na direcção normal à superfície
e supondo um coeficiente de atrito estático aproximadamente igual a 0.5 para o contacto tanto
com a alavanca como com a cápsula , temos que:
6t: = μ . W� + �1 Z 4B. [2.20]
O valor obtido para a força de atrito através da eq.[2.20] é de 1.317 N, ou seja, 134
gramas força. O solenóide usado é então suficiente para que o mecanismo funcione,
produzindo uma força de atrito aproximadamente 4 vezes maior que o peso do mecanismo, o
que leva a crer que será mais que suficiente para vencer todo o atrito que não foi contabilizado
nesta análise, atrito entre peças no interior do mecanismo.
Figura 2.10 – Esquema das forças que actuam na manivela e na parede do invólucro.

30
Capitulo 3 - Preparação da experiência
3.1. Introdução
O flutuador movimenta-se segundo 6 graus de liberdade. Porém, são os movimentos que
contribuem para o deslocamento vertical do balastro que são aproveitados para a produção de
energia; portanto, a rotação em torno do eixo vertical é praticamente irrelevante.
Para determinar os movimentos do flutuador, foi necessário colocar acelerómetros em
posições estratégicas de modo a captarem as acelerações que se pretendem de modo eficaz.
Para poder ler os sinais obtidos dos sensores foi necessário proceder à sua montagem
mediante várias considerações. Foram usados 3 sensores: um para medição das 3
acelerações lineares segundo x, y, e z (MMA7260QT) e dois sensores de velocidade angular
(LISY300AL).
Para que os sensores estivessem no mesmo referencial, foi necessário projectar e
construir o suporte esquematizado na figura 3.1.
3.2. Montagem eléctrica
De um modo geral, o sinal dos sensores passa por um amplificador de corrente, para
evitar perturbações causadas por impedâncias, seguindo depois para um PIC que possibilita a
comunicação e leitura do sinal com o computador.
Figura 3.2 – Esquema geral da montagem eléctrica realizada.
Figura 3.1 - Esquema do posicionamento dos sensores no suporte.

31
O suporte foi preso a uma bord e os sensores ligados a filtros RC, fig. 3.3.
Figura 3.3 – Esquema de montagem dos acelerómetros usados.
Na bord está também implementado um regulador de tensão (Op Amp Buffer) que
transforma a tensão de 5 volts, a que o micro controlador (PIC) funciona, para uma tensão de
3,3 volts apropriada aos sensores.
O accionamento do solenóide é realizado através do sinal da velocidade do eixo vertical
(eixo de arfagem z). Para obter o sinal da velocidade foi necessário integrar o sinal da
aceleração em tempo real no PIC. O tempo de integração introduz um erro considerável no
accionamento do solenóide.
Para transmitir a ordem de fecho e abertura ao solenóide foi necessário proceder à
montagem de um pequeno circuito eléctrico. Um relé não foi solução por ter tempos de
actuação muito grandes.
Figura 3.4 – Esquema do circuito usado para o accionamento do solenóide.
O circuito é constituído por um transístor clássico (par Darlington) TIP 120 (suporta até 5
amperes) que deixa passar corrente ao solenóide, conforme é-lhe chegado o sinal de ordem do
PIC. O diodo serve para proteger o transístor e o condensador é de 1mF. A resistência de 1K
serve para polarizar a base do transístor que é da ordem dos 50mA à saída do PIC.

32
3.3. Tratamento do sinal
3.3.1. Introdução
A aquisição do sinal foi feita através de medições equi-espaçadas no tempo com uma
frequência de amostragem de 100 Hz.
Para obter a velocidade e posição integrou-se, respectivamente, o sinal da aceleração e
velocidade, usando a regra de 3 pontos de Simpson. Sendo a e b dois pontos quaisquer da
curva y(x), a regra expressa-se da seguinte forma
� ~86 ��� = ℎ3 [��-� + 4��~9� + ����] Eq. [3.1]
com,
~9 = - + �2 d ℎ = - − �2
O sinal original apresentava uma precisão relativa adequada na janela de frequência
que importa e, fora dela, tornava-se preponderante o ruído de muito alta frequência e de muito
baixa frequência.
As velocidades e as posições que se obtêm quando se integra uma componente
harmónica da aceleração aumentam com o inverso de �. Dada uma componente de
aceleração de amplitude A, tem-se que
~� = 0. e���� . +� Eq. [3.2]
~� = − 0� . �fe�� . +� Eq. [3.3]
~ = − 0�� . e���� . +� Eq. [3.4]
Como � = ��� , pode-se concluir que a amplitude da velocidade é proporcional a � e a
amplitude da posição proporcional a ��. Isto significa que um ruído de alta frequência na
aceleração introduz um ruído de amplitude mais baixa na velocidade e de amplitude ainda mais
baixa na posição. Em contrapartida, um ruído de baixa frequência na aceleração introduz um
ruído de maior amplitude na velocidade e de ainda maior amplitude na posição. O tratamento
do sinal obtido dos sensores é feito em Phyton.

33
Figura 3.5 – Sinal obtido sem filtro da aceleração (azul) e respectiva velocidade (verde).
3.3.2. Filtro passa-baixo
Embora afecte pouco a posição, procurou-se eliminar o ruído de alta frequência com
um filtro recursivo passa-baixo. Cada componente do filtro baseia-se numa média de um
determinado número de pontos. Em cada ponto, o valor filtrado é o valor de um polinómio de
um determinado grau ajustado por mínimos quadrados a um conjunto de n+1 pontos, estando
n/2 pontos à esquerda e n/2 pontos à direita. Considere-se um caso de n=9 e um polinómio do
sexto grau. Aproximando os 9 pontos pelo polinómio de sexto grau, tem-se esquematicamente
o representado na fig.3.6:
Determinados os coeficientes do polinómio, o valor filtrado é o valor do polinómio em +�: ~ = �*. +* + �1. +1 + ��. +� + �3
Chamando resíduo à distância entre cada ponto experimental e a curva que se
pretende ajustar, e sendo n o número de pontos a usar no filtro, tem-se:
�� = �*. +�* + �1. +�1 + ��. +�� + �3 − ~� Eq. [3.5] �� = �*. +�* + �1. +�1 + ��. +�� + �3 − ~� Eq. [3.6] �� = �*. +�* + �1. +�1 + ��. +�� + �3 − ~� Eq. [3.7]
Figura 3.6 – Polinómio de sexto grau.

34
Os coeficientes do polinómio são determinados de forma a minimizar o ∑ �K�, ou seja:
X = u �K� = �g�çãf��3; ��; �1; �*� Eq. [3.8]
Como o resíduo é sempre positivo, o ponto de estacionaridade corresponde a um
mínimo. Para obter as constantes da função, resolve-se o sistema de equações dado por:
¡ ¢X¢�3 = 0 ; ¢X¢�� = 0 ; ¢X¢�1 = 0 ; ¢X¢�* = 0£ ⇒ � �3; ��; �1; �* � Eq. [3.9]
Como o polinómio interpolador está centrado, a contribuição dos termos de ordem
ímpar para o resíduo é nula. Portanto, basta determinar os coeficientes �3 , �� , �1 , �* do
polinómio. Como o polinómio está centrado e os pontos estão equi-espaçados, ter-se-á um
número impar de pontos.
Em geral, para um filtro de sexta ordem com n pontos, o valor filtrado ~�∗ é dado por:
~�∗ = �fd�3 × ~� + u [�fd�K × �~�#K + ~�¦K�]§¨á©Kk� Eq. [3.10]
com �fd�K = �3 , �fd�K = ª«¦ªG.KG¦ª¬.K¬¦ª.KF e 29áM = �� .
As expressões para os coeficientes, em função do número de pontos, são:
�3 = 1225�� − 57575�1 + 605395�� − 95225464 Eq. [3.11]
�� = −11025�1 + 33075�� − 150748516 Eq. [3.12]
�1 = 24255�� − 3476554 Eq. [3.13] �* = −15015 Eq. [3.14] � = 4� × ��* − 56. �1 + 784. �� − 2304� Eq. [3.15]
Um exemplo de sinal filtrado por um filtro passa-baixo de sexta ordem com 19 pontos
(n=18) é o que se representa na fig.3.7.

35
Figura 3.7 – Sinal filtrado pelo filtro passa-baixo.
Tanto para os instantes iniciais como finais dos ensaios, o filtro usado é ajustado com
número de pontos (n menor) com uma interpolação diferente, de modo a não perder
informação nos extremos da função.
Este filtro base pode aplicar-se recursivamente.
3.3.3. Filtro passa-alto
Obtém-se um filtro passa-alto subtraindo ao valor original y(t) um valor filtrado y*(t) com
um critério passa-baixo para a frequência que se pretende.
~�Kqt�+� = ~�+� − ~∗�+� Eq. [3.16]
Por exemplo, na fig. 3.8 está ilustrada a aplicação de um filtro passa-alto de 601 pontos
ao sinal original. Para obter o sinal filtrado subtrai-se à função original a função obtida pela
minimização dos resíduos.
Figura 3.8 – Sinal filtrado pelo filtro passa-alto.
Em ambos os filtros tratam-se as extremidades de modo a não perder informação nos
extremos do sinal. Para uma melhor filtragem dos resultados, os filtros usados são aplicados
recursivamente.
Tempo (s)
Sinal original
Sinal filtrado
Sinal filtrado com
critério passa-alto

36
(a) (b)
Figura 3.9 – Conjunto de filtros passa-baixo (a) e passa-alto (b).
Foi feito um estudo para adequar o nº de pontos usados nos conjuntos de filtros às
frequência que se querem filtrar, de modo a que, à medida que se varia a frequência ao longo
dos ensaios, os filtros não se tornem desadequados e não sejam uma fonte de erro nos
resultados obtidos. Foram usados conjuntos de 6 filtros com os números de pontos constantes
da tabela 3.1:
Filtro Frequências [Hz] Filtro 1 Filtro 2 Filtro 3 Filtro 4 Filtro 5 Filtro 6
Passa-baixo [0.8 ; 1.6] 61 59 55 53 51 47
Passa-alto
[1.1 ; 1.6] 581 553 527 499 473 445
[0,8 ; 1.1] 1161 1107 1051 997 943 889
Tabela 3.1 – Nº de pontos (n) dos filtros usados no tratamento de sinal.
A diferença no conjunto de filtros usados, consoante a frequência das ondas, apenas é
necessária para o filtro passa-alto, pois é o filtro que depende mais da frequência e,
consequentemente, o que mais potencia a alteração e o “roubo” de informação aos resultados
obtidos.
3.4. Ensaio de precisão dos acelerómetros
Antes de proceder à simulação deste novo tipo de sistema no canal de ondas, foi
necessário testar os sensores usados, para aferir a precisão dos acelerómetros, configurar a
aquisição dos sinais e proceder ao seu correcto tratamento através de filtros.
O “ensaio da caixa” consistiu em deslocar os acelerómetros dentro de uma caixa e
comparar as posições extremas obtidas com as dimensões reais da caixa, através da
integração das acelerações e resultantes velocidades.

37
Figura 3.10 – Caixa usada no ensaio e respectivas dimensões.
Na fig.3.11 estão representadas as coordenadas calculadas a partir do acelerómetro
quando este é deslocado dentro da caixa, para ambos os lados. Em abcissas está marcado um
intervalo de tempo de 20 segundos.
Figura 3.11 – Deslocamentos dos acelerómetros dentro da caixa.
Na tabela 3.2 estão as amplitudes médias e máximas dos deslocamentos efectuados e
os respectivos desvios e correspondentes erros relativos.
Dimensão
[m]
Amplitude
média [m]
Desvio
médio[m]
Erro
médio
Desvio máximo [m]
Erro máximo
[%]
Lado 1 0,271 0,2711 0,0011 0,41% 0,0232 8,6%
Lado 2 0,297 0,2892 0,0012 0,43% 0,0210 7,3%
Tabela 3.2 – Valores dos desvios e respectivos erros dos acelerómetros.
-0,2
-0,1
0
0,1
0 5 10 15 20
De
slo
cam
eto
[m
]
lado1
-0,2
-0,1
0
0,1
0 5 10 15 20
De
slo
cam
eto
[m
]
Tempo [s]
lado2

38
Note-se que o erro relativo médio é muito baixo, sendo a precisão média dos
acelerómetros muito boa. O desvio máximo já é um valor considerável, mas que não
surpreende devido às condições em que foi feita a experiência, visto que os acelerómetros
foram deslocados com as mãos, os bordos do tabuleiro eram bastante irregulares e, além
disso, o tabuleiro não estava devidamente fixo.
3.5. Ensaio de precisão dos velocímetros
Através do movimento pendular testou-se a precisão dos medidores de aceleração e
de velocidade angular. Como o pêndulo foi calibrado para que o período do seu movimento
fosse próximo do período das ondas produzidas pelo batedor no canal, trabalhou-se o
tratamento do sinal nos resultados obtidos neste ensaio.
Na experiência realizada, a barra é considerada inelástica.
O movimento pendular puro, sem atrito, é descrito pela equação diferencial não linear,
��®�+� + �% sin�®� = 0 4B. [3.17]
A solução da equação anterior para uma amplitude angular ®3 é
� = 2E± h� ²1 + ®3�16 ³ , 4B. [3.18]
em que l é a distância do centro de massa do pêndulo è sua articulação. Este comprimento foi
escolhido de forma a obterem-se períodos próximos dos usados nas ondas do canal.
Na fig.3.12 estão representadas as forças que actuam no pêndulo, T e P (tensão no fio
e peso respectivamente), bem como as projecções do peso nos eixos tangencial e radial (�M e �N respectivamente). A força tangencial é negativa quando se opõe ao aumento de ®.
Figura 3.12 – Representação do pêndulo e das forças nele aplicadas

39
� = &� = ´ �M� + �N� 4B. [3.19] �M = �. sin�®� 4B. [3.20]
Com a integração do sinal da velocidade angular obteve-se o ângulo que o pêndulo faz
com a vertical em cada instante. Assim, com o ângulo obtido e com as acelerações �N e �M
determina-se a aceleração vertical P através da eq.[3.19] e, de seguida, a aceleração
projectada no eixo tangencial através da eq.[3.20]. Esse valor é comparado com o valor da
aceleração �M obtida através do acelerómetro linear.
Figura 3.13 – Sinal da aceleração vertical obtido através da eq.[4.19] e eq.[4.20].
O valor do desvio médio entre os gráficos ilustrados é de 2,915 x 10-5 m, valor bastante
reduzido. O desvio máximo já é considerável, cerca de 0,0783 metros. É preciso ter em conta
que o desvio de precisão aqui calculado para o velocímetro angular é afectado da precisão dos
dois acelerómetros, como mostram as fórmulas usadas.
Verificou-se que há outros modos de oscilação além do pendular puro.
3.6. Preparação do ensaio no canal
No ensaio laboratorial, a geração de ondas é feita por um batedor de ondas situado na
extremidade do canal de ondas, fig.3.14. A altura do canal estava limitada a 0,5 metros, por
questões de resistência das paredes de vidro do tanque à pressão exercida pela água.

40
Foi necessário construir um suporte para o dispositivo que permitisse a correcta
funcionalidade do mesmo, mais precisamente do movimento do balastro. Esta estrutura é
constituída por uma estrutura assente no fundo do canal, que sustenta o balastro, e por uma
estrutura móvel (suporte do balastro), que acompanha o movimento da bóia e onde estão os
fios aos quais o balastro se prende nos movimentos verticais ascendentes. À estrutura fixa
estão fixados dois tubos que servem de guiamento ao suporte do balastro, fig.3.15.
As dimensões verticais do suporte foram
ditadas pela profundidade disponível do canal
(0,5 metros).
Toda a estrutura é feita em aço, excepto o
guiamento, feito em PVC, para que o atrito seja
baixo. O suporte do balastro é feito em teflon
(cilindros brancos) para ter um peso reduzido,
minimizando as alterações na dinâmica da bóia.
Figura 3.15 – Suporte do dispositivo
Para a medição da altura das ondas no canal foram usadas sondas de nível disponíveis
no laboratório. São sondas de nível resistivas, com uma precisão de cerca de 0,1mm para o
erro estático. O erro aumenta ligeiramente no caso dinâmico, pois o movimento do fluido
acentua os fenómenos de capilaridade que fazem variar a distância percorrida pela corrente
eléctrica.
Figura 3.14 – Canal de ondas

41
(a) (b)
(b)
As sondas são também sensíveis a variações de temperatura, pois a condutibilidade da
água varia com a temperatura. Assim, foi necessário calibrar as sondas diariamente. A
calibração consistiu em deslocar a sonda em profundidade, medindo 3 alturas diferentes e
distanciadas de 4 cm, e registando os 3 valores de tensão correspondentes como se
exemplifica na fig.3.16.
-0,05
-0,03
0,00
0,03
0,05
1,50 2,00 2,50Alt
ura
(m
)
Tensão [volts]
Calibração
Figura 3.16 – Exemplo de uma calibração feita (a) ; Sonda de nível utilizada (b)

42
Capitulo 4 – Medição e análise dos resultados
4.1. Introdução
No canal de ondas foram ensaiadas várias configurações de estados de mar e de bóia.
Para cada configuração da bóia ensaiaram-se ondas de 2 cm, 4 cm e, em alguns casos, 6 cm
de altura. A frequência foi variada entre 0,8 e 1,6 Hz, ou seja, entre 0,625 e 1,25 segundos.
Os gráficos seguintes, fig.4.1, mostram um exemplo de um sinal da aceleração vertical
obtido num ensaio, assim como a respectiva velocidade e posição. É também ilustrado o sinal
da altura das ondas, obtido com as sondas de nível.
Figura 4.1 – Sinal da aceleração vertical, respectiva velocidade e posição e altura das ondas,
para o ensaio da bóia livre com alturas de onda de 2 cm e frequência 0,8 Hertz.
Verifica-se, como era de esperar, que os extremos da velocidade correspondem aos
zeros da aceleração, assim como os extremos da posição correspondem aos zeros da
velocidade, mas com o dobro do comprimento de onda.
-4,0E-1
-2,0E-1
0,0E+0
2,0E-1
4,0E-1
20 22 24 26 28 30( m
/s^
2 )
tempo (s)
Aceleração_z
-1,0E-1
-5,0E-2
0,0E+0
5,0E-2
1,0E-1
20 21 22 23 24 25 26 27 28 29 30
( m
/s )
tempo (s)
Velocidade_z
-2,0E-2
-1,0E-2
0,0E+0
1,0E-2
2,0E-2
20 21 22 23 24 25 26 27 28 29 30
( m
)
tempo (s)
Posição_z
-1,5E-2
-7,5E-3
1,1E-16
7,5E-3
1,5E-2
20 21 22 23 24 25 26 27 28 29 30
( m
)
tempo (s)
Altura H

43
Para mais fácil interpretação dos resultados, é calculado o factor de amplificação
dinâmico de arfagem (FAD arfagem) para cada frequência. O FAD que se considerou foi o
quociente entre a amplitude máxima do movimento vertical da bóia (arfagem) e a amplitude
máxima da onda em cada período. Deste modo é possível saber quais as frequências que
proporcionam maiores amplitudes de movimentos à bóia, ou seja, quais as frequências mais
favoráveis à extracção de energia.
Outro parâmetro importante considerado foi o factor de amplificação dinâmico do
balastro. Este factor é o quociente entre a amplitude do deslocamento do suporte do balastro,
que seria igual ao deslocamento do balastro se o desempenho do solenóide fosse perfeito, e a
amplitude da onda. Vamos chamar-lhe factor de amplitude do balastro (FAD balastro). A
diferença para o FAD de arfagem, é que são também considerados os deslocamentos verticais
devido aos movimentos de avanço, cabeceio e balanceio da bóia.
Para determinar os acréscimos de deslocamento do balastro devido a esses movimentos
são consideradas duas alturas: a altura que o balastro sobe devido ao movimento de avanço
(h1) e a altura que o balastro sobe devido aos movimentos de balanceio e cabeceio em
conjunto.
Figura 3 – Alturas “ganhas” com o movimento de avanço, cabeceio e balanceio.
A altura “ganha” pelo movimento de arfagem (h1) vai depender apenas das posições x e
y em cada instante, obtidas com o acelerómetro linear, e do comprimento do fio. A altura
“ganha” pelo movimento conjunto de cabeceio e balanceiro vai depender dos ângulos obtidos
com a vertical e da altura do centro de massa da bóia, pois considera-se que os movimentos
de cabeceio e balanceio são em torno do centro de massa.
h1
h2

44
Figura 4.3 – Esquema ampliado da bóia numa situação de grande amplitude de avanço, cabeceio e
balanceio, ou seja, os dois casos da figura 4.2 em simultâneo e em três dimensões.
As fórmulas de cálculo das alturas “ganhas” com os movimentos de avanço, cabeceio e
balanceio são baseadas apenas em trigonometria e no teorema de Pitágoras.
ℎ� = % − �� ⇔ ℎ� = % − µ¶��� + ~�� − �· 4B. [4.1]
ℎ� = ℎ@p − �� ⇔ ℎ� = ℎ@p − ¸ ��1+���®M� + 1+���®N� 4B. [4.2]
Nas fórmulas consideradas, quando os movimentos de avanço, balanceio e cabeceio se
sobrepõem, o cálculo é feito por excesso o que pode ser um factor de erro considerável, que
faz com que os resultados obtidos para os factores de amplificação do balastro sejam um
pouco superiores aos valores reais.
Para ter uma ideia da energia que o dispositivo pode produzir à escala real, é feita uma
estimativa. Sabendo que
[¹-++] = ºe = »� &�e 4B. [4.3]
a potência do dispositivo à escala real é dada por
� = � × � × &86q × � × 10¼½ 4B. [4.4]
hcg

45
sendo P¾¿À a massa do balastro, d o deslocamento efectuado pelo balatro, Á a frequência
desses deslocamentos e FE o factor de escala, neste caso igual a 7, conforme descrito no
segundo capítulo.
Na análise adimensional feita em [14] obtiveram-se valores dos factores de
amplificação dinâmica nos diferentes graus de liberdade e assim, pode-se identificar as
frequências de ressonância dos diferentes movimentos. A frequência adimensional de
ressonância é dada por
� = ω��� 4B. [4.5] Verificou-se então que a ressonância em arfagem surge a uma frequência
adimensional de 0,965, correspondente a 1,264 Hz no modelo em estudo. Em relação ao
cabeceio, a ressonância dá-se a uma frequência adimensional de 0,425, ou seja, 0,839 Hz no
modelo. A resposta em avanço é também muito significativa em baixas frequências, onde o
corpo é arrastado com ondas de comprimento elevado. A frequência adimensional em avanço
é de 0,360, ou seja, 0,772 Hz no modelo.
4.2. Bóia livre
Nestes primeiros ensaios, o objectivo foi analisar o comportamento da bóia livre, ou seja,
sem estar ligada ao suporte do balastro.
Figura 4.4– Factor de amplitude dinâmica de arfagem para a bóia livre.
Os factores de amplitude dinâmicos devem ser independentes da altura da onda, porém,
verifica-se que os pontos encontram-se bastante dispersos, fig.4.4. Note-se que em ambas as
alturas de onda o FAD de arfagem em ressonância (1,264 Hz) é bastante elevado (superior a
4). A curva traçada tenta ajustar-se (dentro do possível) aos pontos obtidos.
0,60,70,80,91,01,11,2
0
1
2
3
4
5
6
0,8 0,9 1 1,1 1,2 1,3 1,4 1,5 1,6
FA
D A
rfa
ge
m
Frequência [Hz]
Período [s]
H=2 cm
H=4 cm

46
Figura 4.5 – Comparação entre o FAD de arfagem da bóia livre e o FAD “corrigido” para ter
em conta os movimentos de avanço, balanceio e cabeceio.
Analisando a figura 4.5, é possível concluir que os movimentos de avanço, balanceio e
cabeceio são muito favoráveis ao movimento vertical do balastro. O FAD do balastro é superior
ao FAD de arfagem da bóia em todo o intervalo de frequências estudado, sendo esta diferença
um pouco mais evidente nas baixas frequências, pois são próximas da frequências de
ressonância de avanço e cabeceio.
4.3. Conjunto bóia e estrutura do balastro
O mesmo tipo de análise é agora feito para a bóia ligada à estrutura do balastro. A
massa do conjunto é ajustada retirando algumas esferas de chumbo.
Figura 4.6 – Factor de amplitude dinâmica de arfagem para o conjunto bóia e suporte do
balastro.
Quando a bóia é ligada à estrutura do balastro, a sua dinâmica é ligeiramente alterada.
Como era de esperar, os FAD arfagem diminuem, sendo a forma da curva semelhante.
Também aqui se verificam diferenças quando se altera a altura de onda, havendo alguma
0,60,70,80,91,01,11,2
0
1
2
3
4
5
0,8 0,9 1 1,1 1,2 1,3 1,4 1,5 1,6
FA
D
Frequência [Hz]
Período [s]
FAD arfagem
(H=4cm)
0,60,70,80,91,01,11,2
0
1
2
3
4
0,8 0,9 1 1,1 1,2 1,3 1,4 1,5 1,6
FA
D A
rfa
ge
m
Frequência [Hz]
Período [s]
H=2cm
H=4cm
47
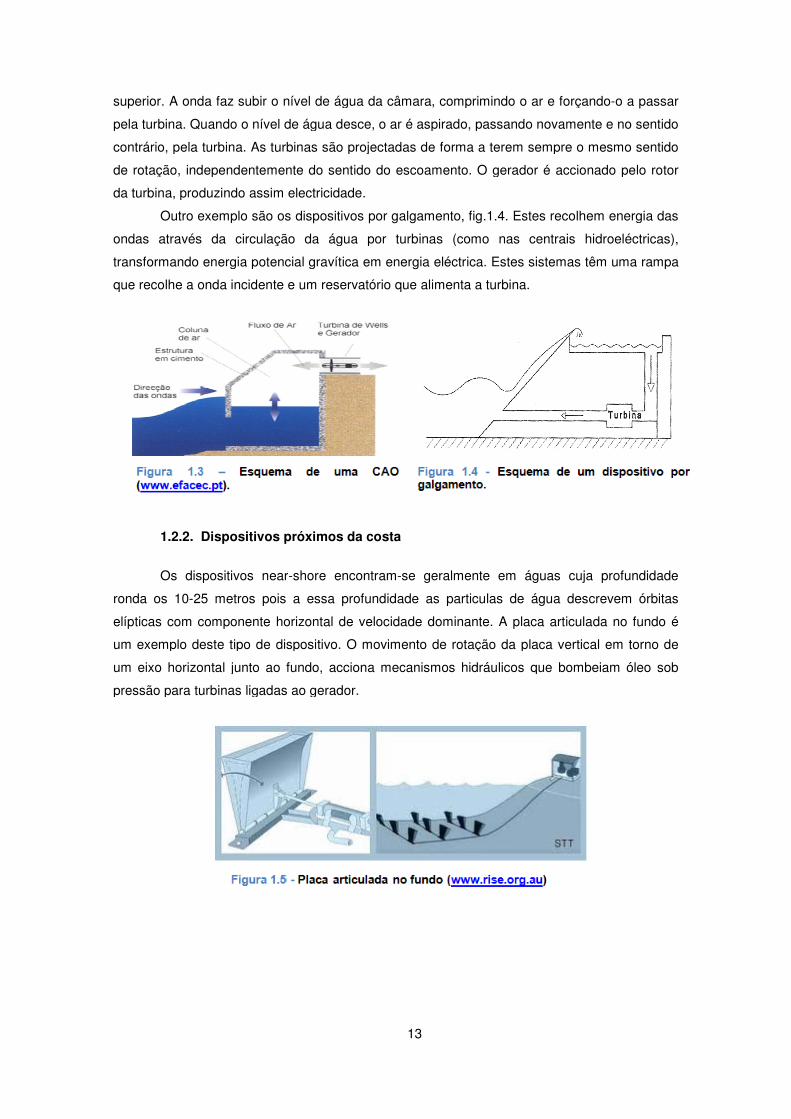
dispersão de resultados. A frequência de ressonância da curva é a apresentado na introdução
deste capítulo, 1.264 Hz.
O atrito no guiamento e a menor liberdade de movimentos são as causas da diferença
de comportamento quando se acopla a estrutura do balastro à bóia.
Figura 4.7 – Comparação entre o FAD de arfagem da bóia e o FAD do balastro para o
conjunto bóia e suporte do balastro.
Em relação ao FAD do balastro, este é também superior ao FAD de arfagem da bóia, em
todo o intervalo de frequência estudado, fig.4.7.
4.4. Conjunto bóia, estrutura do balastro e balastro
Com o balastro integrado no dispositivo, a dinâmica do dispositivo volta a ser alterada.
Como o dispositivo está agora a extrair energia, é de esperar que as amplitudes do movimento
da bóia se reduzam. Neste caso, foram ensaiadas 3 alturas de onda.
Figura 4.8 – FAD de arfagem para conjunto bóia, estrutura e balastro.
Ao accionar o balastro, o dispositivo passa a estar a extrair energia. Já não é de esperar
que os valores dos factores adimensionais de arfagem sejam independentes da altura das
ondas, pois a energia das ondas é proporcional a H2 e a energia na bóia (correspondente à
0,60,70,80,91,01,11,2
0
1
2
3
4
0,8 0,9 1 1,1 1,2 1,3 1,4 1,5 1,6
FA
D
Frequência [Hz]
Período [s]
FAD arfagem H=4cm
FAD balastro H=4cm
0,60,70,80,91,01,11,2
0
0,4
0,8
1,2
1,6
0,8 0,9 1 1,1 1,2 1,3 1,4 1,5 1,6
FA
D A
rfa
ge
m
Frequência [Hz]
Período [s]
H=2cm
H=4cm
H=6cm

48
energia do balastro) é proporcional a H. Seria então de esperar que a curva para alturas de 4
cm fosse o dobro da curva de 2 cm. Tal não se verifica no gráfico, o que pode ser indicativo de
uma descida de rendimento. Os valores para ondas de 6 cm foram desprezados, pois o
dispositivo não funcionou correctamente com uma altura de onda tão elevada, para uma
profundidade do canal limitada.
Figura 4.9 - Comparação entre o FAD de arfagem da bóia e o FAD do balastro para o conjunto bóia,
suporte e balastro.
As análises da comparação entre o FAD do balastro e o do movimento de arfagem da
bóia é em tudo semelhante às análise feitas nos dois casos anteriores.
Comparem-se agora os três casos estudados até aqui, fig.4.10.
Figura 4.10 – Comparação do FAD de arfagem entre a bóia livre, conjunto bóia e suporte e
conjunto bóia, suporte e balastro.
Como era de esperar, os factores dinâmicos de arfagem diminuem bastante quando se
adiciona a estrutura do balastro, e voltam a diminuir quando o dispositivo extrai energia.
As frequências de ressonância encontram-se todas entre os 1.2 e os 1.3 Hz. A
considerável descida quando se adiciona a estrutura à bóia é essencialmente devida ao atrito
no guiamento, que “consome” energia ao dispositivo. Com o accionamento do balastro, o
0,60,70,80,91,01,11,2
0,3
0,8
1,3
1,8
0,8 0,9 1 1,1 1,2 1,3 1,4 1,5 1,6
FA
D
Frequência [Hz]
Período [s]
FAD arfagem H=4cm
FAD balastro H=4cm
0,60,70,80,91,01,11,2
0
1
2
3
4
5
6
0,8 0,9 1 1,1 1,2 1,3 1,4 1,5 1,6
FA
D A
rfa
ge
m
Frequência [Hz]
Período [s]
Bóia livre H=2cm
Bóia+Suporte H=2cm
Bóia+ balastro H=2cm

49
movimento da bóia passa a corresponder ao movimento do balastro, o que torna a comparação
com as restantes configurações desapropriada.
Para baixas frequências é curioso que a bóia acoplada da estrutura do balastro
consegue ter FADs maiores que a bóia livre, devido à maior amplitude dos movimentos de
avanço, cabeceio e balanceio. Uma explicação possível é o facto de a bóia estar presa na
extremidade à estrutura do balastro por um fio muito curto, que é constantemente tencionado,
aplicando momentos de rotação à bóia.
Figura 4.11 - Amplitude de avanço para a bóia livre, conjunto bóia e suporte e conjunto bóia, suporte e balastro.
Para baixas frequências, a bóia livre apresenta amplitudes de avanço menores, pois foi
necessário impedir os grandes movimentos horizontais que se registavam, para a bóia não
bater nos vidros laterais do tanque. As amplitude quando se acciona o balastro reduzem-se
consideravelmente. O aumento das amplitudes nas baixa frequências é devido à baixa
frequência de ressonância do movimento de avanço.
Figura 4.12 - Amplitude de cabeceio e balanceio para a bóia livre, conjunto bóia e
suporte e conjunto bóia, suporte e balastro.
A figura 4.12 ilustra a amplitude dos movimentos de cabeceio e balanceio em conjunto. É
evidente que para a bóia livre as amplitudes são muito maiores, principalmente entre os 1.2 e
0,60,70,80,91,01,11,2
0
0,05
0,1
0,15
0,2
0,25
0,3
0,8 0,9 1 1,1 1,2 1,3 1,4 1,5 1,6
Am
pli
tud
e A
va
nço
[m
]
Frequência [Hz]
Período [s]
Bóia livre H=4cm
Bóia+Suporte H=4cm
Bóia+Balastro H=4cm
0,60,70,80,91,01,11,2
0
10
20
30
40
0,8 0,9 1 1,1 1,2 1,3 1,4 1,5 1,6
Am
pli
tud
e C
ab
ece
io e
Ba
lan
ceio
[g
rau
s]
Frequência [Hz]
Período [s]
Bóia livre H=2cm
Bóia+suporte H=2cm
Bóia + balastro H=2cm

50
1.4 Hz. Nas restantes frequências, as amplitudes de balanceio e cabeceio para a bóia livre são
mais baixas que para os conjuntos bóia-estrutura e bóia-estrutura-balastro, por nestas
configurações a bóia estar presa pelo fio muito curto, que é constantemente tencionado,
aplicando momentos de rotação à bóia.
Para estimar a potência que o dispositivo extraí (eq.[4.4]) foi medido o valor médio do
deslocamento do balastro para cada frequência. Foi também calculado o rendimento do
dispositivo para cada frequência, dividindo a sua potência que este extrai pela potência
disponível nas ondas, calculada através da equação [A5].
Frequência [Hz] 0,08 0.10 0,11 0,12 0,1264 0,13 0,14 0,16
Deslocamento [m] 0,9 1,1 1,3 1,5 1,8 1,6 0,9 0,5
Potência do dispositivo [kW] 43,8 66,9 94,8 109,4 138,3 126,4 76,6 48,6
Potência disponível [kW] 715,5 572,4 477,0 477,0 452,8 440,3 408,9 357,8
Rendimento dispositivo (%) 6,1 11,7 19,9 22,9 30,5 28,7 18,7 13,6
Tabela 4.1 – Valores de potência à escala real para ondas de 2 m (2cm no canal).
A frequência mais favorável ao desempenho energético do dispositivo é 1,264 Hz, pois
apresenta maior potência e maior rendimento. Verifica-se que as altas frequências são, em
geral, mais favoráveis ao desempenho energético do dispositivo que a baixas frequências. A
potência extraída pelo balastro pode atingir os 138 kW em ressonância, com um rendimento de
30,5%.
4.5. Ondas irregulares
Para simular estados de mar mais próximos da realidade, foram ensaiadas ondas
irregulares. As alturas significativas usadas foram de 2 e 4 cm. Para ondas irregulares a
comparação dos factores adimensionais de arfagem perdem o seu significado. A altura
significativa corresponde à média das alturas das ondas de maior amplitude, correspondentes
a um terço do total de ondas sobrepostas. Isto resulta, no espectro de Pierson-Moskowitz,
�� = 1.416. �� Eq[4.4]
Assim, altura significativa de 4 cm gera um regime de ondas menos energético que
ondas regulares de 4 cm.
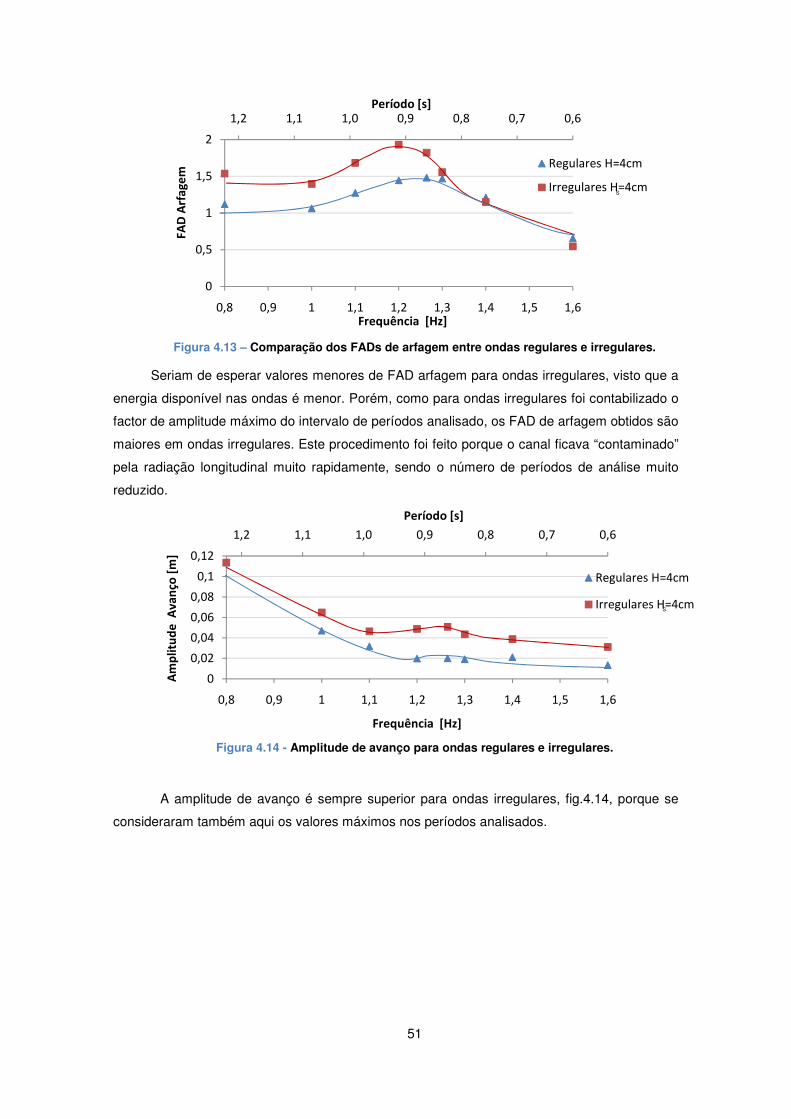
51
Figura 4.13 – Comparação dos FADs de arfagem entre ondas regulares e irregulares.
Seriam de esperar valores menores de FAD arfagem para ondas irregulares, visto que a
energia disponível nas ondas é menor. Porém, como para ondas irregulares foi contabilizado o
factor de amplitude máximo do intervalo de períodos analisado, os FAD de arfagem obtidos são
maiores em ondas irregulares. Este procedimento foi feito porque o canal ficava “contaminado”
pela radiação longitudinal muito rapidamente, sendo o número de períodos de análise muito
reduzido.
Figura 4.14 - Amplitude de avanço para ondas regulares e irregulares.
A amplitude de avanço é sempre superior para ondas irregulares, fig.4.14, porque se
consideraram também aqui os valores máximos nos períodos analisados.
0,60,70,80,91,01,11,2
0
0,5
1
1,5
2
0,8 0,9 1 1,1 1,2 1,3 1,4 1,5 1,6
FA
D A
rfa
ge
m
Frequência [Hz]
Período [s]
Regulares H=4cm
Irregulares H=4cm
0,60,70,80,91,01,11,2
0
0,02
0,04
0,06
0,08
0,1
0,12
0,8 0,9 1 1,1 1,2 1,3 1,4 1,5 1,6
Am
pli
tud
e A
va
nço
[m
]
Frequência [Hz]
Período [s]
Regulares H=4cm
Irregulares H=4cm
S
S

52
Figura 4.15 - Amplitude de cabeceio e balanceio para ondas regulares e irregulares.
O mesmo acontece para a amplitude de balanceio e cabeceio, fig.4.15.
Figura 4.16 – Evolução dos FADs de arfagem com a frequência para ondas irregulares de 2 e
4 cm.
Quando se aumenta a altura de onda significativa para o dobro, é de esperar que os
factores de amplificação também aumentem para o dobro, e tal acontece em alguns pontos da
figura 4.16.
0,60,70,80,91,01,11,2
0
1
2
3
4
5
6
0,8 0,9 1 1,1 1,2 1,3 1,4 1,5 1,6
Am
pli
tud
e C
ab
ece
io e
Ba
lan
ceio
[g
rau
s]
Frequência [Hz]
Período [s]
Regulares
H=2cmIrregulares
H=2cm
0,60,70,80,91,01,11,2
0
0,5
1
1,5
2
0,8 0,9 1 1,1 1,2 1,3 1,4 1,5 1,6
FA
D A
rfa
ge
m
Frequência [Hz]
Período [s]
H=2cm
H=4cm
S
S
S

53
Figura 4.17 – Amplitude de avanço para ondas irregulares de 2 e 4 cm.
As amplitudes de avanço aumentam quando se aumenta a altura de onda significativa,
como seria de esperar.
Figura 4.18 - Evolução dos FADs de arfagem e do balastro para ondas irregulares de 2 e 4
cm.
Em relação ao FAD do balastro, é superior ao FAD de arfagem da bóia em todo o
intervalo de frequências estudado, sendo que esta diferença é mais significativa para
frequências baixas, próximas da frequência de ressonância de avanço, balanceio e cabeceio.
Para avaliar o desempenho energético do dispositivo em ondas irregulares, são medidos
e somados os deslocamentos do balastro durante 1 minuto. A potência disponível é obtida
através da equação [A.8].
Frequência [Hz] 0,08 0,1 0,11 0,12 0,1264 0,13 0,14 0,16
Deslocamento [m] 24 31 38 47 45 42 25 17
Potência do dispositivo [kW] 48,6 62,8 77,0 95,2 91,2 85,1 50,6 34,4
Potência disponível [kW] 621,1 496,9 451,7 414,1 393,1 382,2 354,9 310,5
Rendimento dispositivo (%) 7,8 12,6 17,0 23,1 23,2 22,3 14,3 11,1
Tabela 4.2 - Valores de potência à escala real para ondas irregulares de 2 m (2cm no canal).
0,60,70,80,91,01,11,21,31,4
0
0,02
0,04
0,06
0,08
0,1
0,12
0,8 0,9 1 1,1 1,2 1,3 1,4 1,5 1,6Am
pli
tud
e A
va
nço
[m
]
Frequência [Hz]
Período [s]
H=2cm
H=4cm
0
0,5
1
1,5
2
2,5
3
0,8 0,9 1 1,1 1,2 1,3 1,4 1,5 1,6
FA
D
Frequência [Hz]
FAD arfagem H=4cm
FAD balastro H=4cm
S
S
S
S

54
Como era de esperar, tabela 4.2, os valores obtidos de potência são mais baixos que
os obtidos para ondas regulares. A potência extraída pelo balastro pode atingir os 95,2 kW em
ressonância (1,2 Hz), com um rendimento de 23,1%. Estes valores são mais realistas que os
valores obtidos para ondas regulares, pois simulam um estado de mar irregular, mais próximo
da realidade.
4.6. Bóia com patilhas
Foram feitos ensaios com patilhas de diferentes dimensões fixas nas partes laterais da
bóia, não estando o balastro a ser accionado, fig.4.19. O objectivo foi ver se as patilhas
melhoravam o desempenho do dispositivo e, no caso de melhorarem, determinar uma
dimensão que maximizasse esse desempenho.
Figura 4.19 - Aspecto e esquema do efeito das patilhas
O uso de patilhas faz com que a bóia não radie energia lateralmente. A bóia absorve
maior quantidade de energia da onda incidente, aumentando a sua eficiência. Como as patilhas
impedem a radiação lateral, o efeito indesejado das paredes laterais (que reflectem as ondas) é
também minimizado.
As dimensões das patilhas usadas indicam-se na tabela 4.3.
Patilha nº 1 2 3 4 5
Dimensão [ÄPÅ] 70 98 126 154 182
Tabela 4.3 – Dimensões das patilhas.
Na figura 4.20 estão os factores de amplificação máximos de arfagem para cada patilha.

55
Figura 4.20 – FAD de arfagem máximo para cada patilha.
Pode-se concluir que, ou o uso de patilhas não é vantajoso, ou não é adequado para
ensaiar em canal de ondas. Os factores de amplitude de arfagem, quando se usa patilhas,
descem consideravelmente. Para as patilhas entre 98 e 154 cm2 ou seja, patilhas 2, 3 e 4, os
FADs máximos não diferem significativamente.
Figura 4.21 – Evolução do FAD de arfagem para cada patilha
Como para as patilhas 2, 3 e 4 os FAD de arfagem não diferem muito, foi traçada uma
curva única para estas três patilhas. A forma das curvas é semelhante para todas as patilhas.
Uma das razões para o uso das patilhas não ser vantajoso prende-se com o facto das
paredes, ao reflectirem a radiação criada pela bóia, provocarem acréscimos no movimento de
arfagem da bóia. O uso de patilhas, apesar de a bóia absorver mais energia da onda incidente,
cancela também o efeito reflector da parede, diminuindo assim a amplitude de arfagem da bóia.
Como as patilhas usadas são menos densas que a água, o que faz com que se altere a
dinâmica da bóia, nomeadamente o seu calado.

56
4.7. Aumento da massa do balastro
Como a energia extraída pelo dispositivo é directamente proporcional à massa do
balastro, foi feito um ensaio com uma massa maior, para ver se este aumento compensa a
esperada diminuição da amplitude de arfagem.
Figura 4.22 – Comparação entre o FAD de arfagem do balastro de 132 gramas e de 162 gramas
Como era de prever, fig.4.22, o factor de amplificação dinâmico diminui em toda a gama
de frequências, sendo a forma da curva em tudo semelhante à curva do balastro com o seu
peso inicial.
Figura 4.23 - Amplitude de avanço do balastro de 132 gramas e de 162 gramas.
Em relação ao movimento de avanço, fig.4.23, verifica-se uma maior amplitude para o
balastro mais pesado, talvez devido a maiores tensões aplicadas no fio.
0,60,70,80,91,01,11,2
-2E-15
0,3
0,6
0,9
1,2
1,5
1,8
0,8 0,9 1 1,1 1,2 1,3 1,4 1,5 1,6
FA
D a
rfa
ge
m
Frequência [Hz]
Período [s]
Balastro de 132 g
Balastro de 162 g
0,60,70,80,91,01,11,2
0
0,02
0,04
0,06
0,08
0,1
0,12
0,14
0,8 0,9 1 1,1 1,2 1,3 1,4 1,5 1,6
Am
pli
tud
e d
e a
va
nço
[m
]
Frequência [Hz]
Período [s]
Balastro de 132 g
Balastro de 162 g
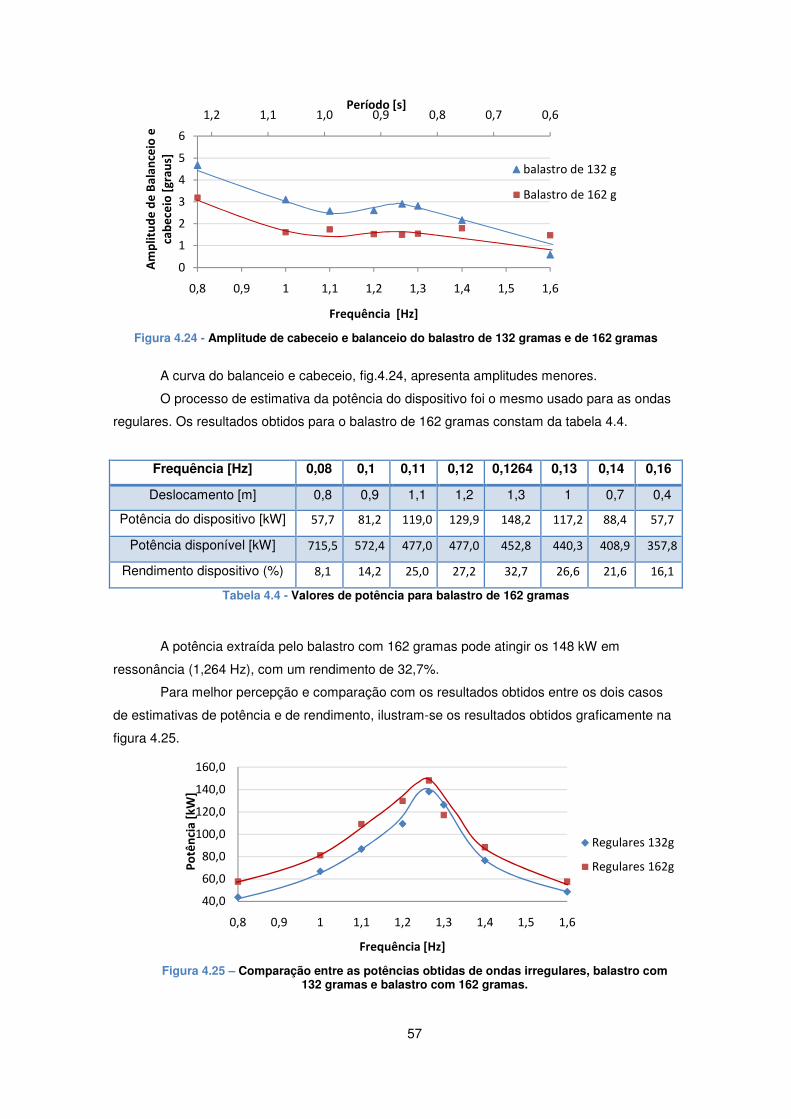
57
Figura 4.24 - Amplitude de cabeceio e balanceio do balastro de 132 gramas e de 162 gramas
A curva do balanceio e cabeceio, fig.4.24, apresenta amplitudes menores.
O processo de estimativa da potência do dispositivo foi o mesmo usado para as ondas
regulares. Os resultados obtidos para o balastro de 162 gramas constam da tabela 4.4.
Frequência [Hz] 0,08 0,1 0,11 0,12 0,1264 0,13 0,14 0,16
Deslocamento [m] 0,8 0,9 1,1 1,2 1,3 1 0,7 0,4
Potência do dispositivo [kW] 57,7 81,2 119,0 129,9 148,2 117,2 88,4 57,7
Potência disponível [kW] 715,5 572,4 477,0 477,0 452,8 440,3 408,9 357,8
Rendimento dispositivo (%) 8,1 14,2 25,0 27,2 32,7 26,6 21,6 16,1
Tabela 4.4 - Valores de potência para balastro de 162 gramas
A potência extraída pelo balastro com 162 gramas pode atingir os 148 kW em
ressonância (1,264 Hz), com um rendimento de 32,7%.
Para melhor percepção e comparação com os resultados obtidos entre os dois casos
de estimativas de potência e de rendimento, ilustram-se os resultados obtidos graficamente na
figura 4.25.
Figura 4.25 – Comparação entre as potências obtidas de ondas irregulares, balastro com
132 gramas e balastro com 162 gramas.
0,60,70,80,91,01,11,2
0
1
2
3
4
5
6
0,8 0,9 1 1,1 1,2 1,3 1,4 1,5 1,6
Am
pli
tud
e d
e B
ala
nce
io e
cab
ece
io [
gra
us]
Frequência [Hz]
Período [s]
balastro de 132 g
Balastro de 162 g
40,0
60,0
80,0
100,0
120,0
140,0
160,0
0,8 0,9 1 1,1 1,2 1,3 1,4 1,5 1,6
Po
tên
cia
[k
W]
Frequência [Hz]
Regulares 132g
Regulares 162g

58
Da análise do gráfico, conclui-se que o aumento do peso do balastro foi vantajoso. A
potência do dispositivo é maior para o balastro de 162 gramas em toda a gama de frequências.
A potência extraída pelo balastro de 162 gramas pode atingir os 150 kW em ressonância, para
o balastro de 132 gramas atinge os 138 kW.
Figura 4.26 - Comparação entre os rendimentos obtidos de ondas irregulares, balastro com
132 gramas e balastro com 162 gramas.
Em relação aos rendimentos, em ondas irregulares o dispositivo apresenta rendimentos
inferiores quando comparado aos casos ensaiados em ondas regulares, chegando a um
rendimento máximo de 23,2 %. Quando se aumenta o peso do balastro para 162 gramas os
rendimentos do dispositivo também aumentam, fruto do aumento da potência do dispositivo,
chegando a um máximo de aproximadamente 33% em ondas regulares.
5,0
10,0
15,0
20,0
25,0
30,0
35,0
0,8 0,9 1 1,1 1,2 1,3 1,4 1,5 1,6
Re
nd
ime
nto
(%
)
Frequência [Hz)
Regulares 132g
Regulares 162g
Irregulares 132g

59
Capítulo 5 – Conclusões e
perspectivas de trabalho futuro
5.1. Conclusões
Neste trabalho foi feito o estudo experimental à escala 1:100 de um novo dispositivo de
aproveitamento de energia das ondas. Foi possível desenvolver a compreensão física da
interacção do corpo flutuante com o escoamento e verificar as suas potencialidades.
Em relação ao projecto do modelo à escala 1:100, obtiveram-se os seguintes erros em
relação ao protótipo: erro de 13% para mais na posição do centro de massa, 7,6% para menos
no valor do momento de inércia em torno do eixo vertical e um erro de 18,7% para mais no
valor do momento em torno dos eixos horizontais. Este último é um erro já considerável e tem
influência nas amplitudes dos movimentos de cabeceio e balanceio que, nas frequências mais
energéticas, acabam por criar alguma instabilidade no movimento da bóia. Esta instabilidade foi
visivel nos ensaios com a bóia livre. O número de Reynolds deste modelo é muitas ordens de
grandeza inferior ao número de Reynolds do protótipo, de modo que os efeitos viscosos estão
fora de proporção.
Em relação à montagem eléctrica, é de notar um atraso no accionamento do solenóide.
Este atraso é suficiente para que o balastro perca cerca de 30 a 50% da amplitude do seu
movimento. Assim, é possível concluir que, numa situação de funcionamento óptimo (situação
irrealista), apesar de uma maior queda das amplitudes de arfagem, o balastro subiria mais e
tornaria o dispositivo muito mais eficiente e energético.
Em relação à filtragem dos sinais obtidos, conclui-se que o número de pontos usados
nos conjuntos de filtros de sexta ordem nem sempre foram os mais adequados, pois os pontos
experimentais (principalmente a baixas frequências) apresentaram desvios consideráveis em
relação às curvas traçadas.
As formas das curvas que se obtiveram estão de acordo com o previsto, apresentando
picos de amplitude sempre próximos das frequências de ressonância previstas. Verificou-se
que os factores de amplitude de arfagem não são independentes da altura de onda, como era
de esperar, havendo grande dispersão de resultados.
Em estados de mar mais próximos da realidade (ondas irregulares), a análise em termos
de factores de amplificação dinâmica perde um pouco o sentido de comparação. Porém, a bóia
apresentou um bom comportamento, com o rendimento máximo a descer cerca de 7% em
relação ao rendimento máximo em ondas regulares.
Os movimentos de avanço, balanceio e cabeceio são favoráveis ao funcionamento do
dispositivo, sendo os valores dos FADs do balastro superiores, 30% a 40% em média, aos
valores dos FADs da bóia em todas as configurações ensaiadas. Os movimentos de avanço,
cabeceio e balanceio podem ainda ter maior influência no funcionamento do dispositivo, se for

60
aumentado o comprimento do fio que liga a bóia à estrutura do balastro. No canal, o
comprimento do fio esteve limitado, devido aos 50 centímetros máximos de profundidade,
estabelecidos por questões estruturais do vidro.
A influência do peso do balastro também esteve de acordo com o esperado. As
amplitudes descem quando o balastro é accionado e os movimentos de cabeceio e balanceio
ganham mais importância. Aumentando o peso do balastro, obtiveram-se valores de potência
maiores e rendimentos também maiores. O aumento da massa compensou a diminuição da
amplitude do movimento do balastro. A utilização de patilhas na bóia não se mostrou vantajosa.
O aumento do aproveitamento de energia da bóia previsto não se verificou, porque ao mesmo
tempo que as patilhas impedem a dissipação da radiação lateral, cancelam o efeito da reflexão
da onda nas paredes e alteram a dinâmica da bóia, nomeadamente o seu calado. É importante
ter em conta esse efeito das paredes, pois contribui para um aumento da amplitude dos
movimentos da bóia, o que indica que os resultados obtidos na arfagem podem ser
exagerados.
Outros factores a ter em conta como possíveis erros experimentais são:
- Atrito no guiamento da bóia;
- Desfasagem entre as sondas de nível e a bóia (por estarem distanciadas de alguns
centímetros);
- A radiação longitudinal; a praia não se apresentava nas melhores condições;
- Desvios da calibração da sonda ao longo do ensaio, devido à variação da temperatura
da água.
A experiência foi de grande utilidade. Confirmou-se o potencial deste novo dispositivo.
Um conceito simples e potencialmente barato, que aproveita o movimento de um corpo
oscilante em todos os seus graus de liberdade e que tem potencial para produzir quantidades
de energia muito úteis, em relação ao seu esperado baixo custo de concepção.
5.2. Recomendações e trabalhos futuros
Ainda à escala 1:100, era vantajoso tentar melhorar o sistema de accionamento do
solenóide. Era importante variar de uma forma mais rigorosa e alargada da variação do peso
do balastro a fim de se determinar um peso óptimo para a extracção de energia.
Seguindo a via experimental, era interessante testar o dispositivo num tanque maior
(ensaio à escala 1:20), principalmente de maior largura, para que a reflexão das ondas nas
paredes laterais não se fizesse sentir tão intensamente. O passo seguinte seria a realização de
ensaio em modelo reduzido à escala 1:10. Para não recorrer ao estrangeiro, uma solução para
o local seria uma das docas situadas na margem sul do Tejo. A vantagem de um ensaio à
escala 1:10 é o modelo ter dimensão suficiente para simular os principais elementos mecânicos
(funcionamento dos travões, etc.).
61
Referências
[1] Gato, L.M.C., Falcão, A.F de O. Energias Renováveis, Parte 1, Departamento de
Energia Mecânica do Instituto Superior Técnico, 2008.
[2] Newman, J.N., Marine Hydrodynamics, MIT press, 1977
[3] Falnes, Johannes, Ocean Waves and oscillating systems. Cambrige University Press,
2002
[4] White, F.M., Fluid Mechanics, 5th Edition, McGraw-Hill, 1999
[5] F. Beer, R. Johnston e DeWolf Mechanics of Materials, 3rd edition, McGraw Hill, 2002.
[6] F. P. e Johnston, E. R. Mecânica Vectorial para Engenheiros: Dinâmica, 7ª Ed.,
2006, McGraw-Hill
[7] Vijay K. Madisettti, Douglas B. Williams, Digital Signal Processing Handbook, 1999
[8] Langtangen, Hans Petter, A Primer on Scientific Programming with Python, Spinger,
2006
[9] Huddleston, Creed, Intelligent Sensor Design, Kindle Edition, 2007
[10] Falcão, A.F. de O. History and Progresss in wave energy utilization. IDMEC, Instituto
Superior Técnico. March, 2009.
[11] Fredrik Gustafsson IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL. 44, NO.
4, APRIL 1996
[12] Chakrabarti, S.k. 1987, Hydrodynamics of Offshore Structures. WIT press, 1987
[13] Stephen E. Levinson, Mathematical Models for Speech Technology, Wiley, 2005
[14] Lopes, Miguel, Gato, L.M.C., Experimental study of the floater of an offshore wave
energy converter
[15] Campos da Silva André, J.M., Patent PT 104 885, “A new concept of wave energy
power plant applicable to deep offshore Waters”, published in 2011, priority date 2009.

62
Apêndice A
Corpos oscilantes em ondas
A.1. As ondas progressivas
Este apêndice reúne nomenclatura e alguma teoria básica sobre as ondas e corpos
flutuantes, baseada sobretudo em [1] .
As ondas do mar são caracterizadas por um conjunto de diferentes variáveis: a
amplitude (a), comprimento de onda (�), a profundidade (h) e o seu período (T).
Com estas variáveis podem ainda definir-se:
- altura de onda � = 2-
- frequência � = ��
- frequência angular � = ���
- número de onda Æ = ��Ç
A relação de dispersão entre � e Æ resulta da condição de fronteira na superfície livre:
�� = �Ætanh �Æℎ� [A.1]
A relação [A.1] mostra que se Æℎ for muito grande (na prática se ℎ/Æ > 0,5) tem-se tanh �Æℎ� → 1 e, consequentemente, �� → �Æ. Assim, a velocidade de propagação das ondas
pode ser obtida pela relação entre o comprimento de onda e o período ou entre a frequência e
o número de onda:
Figura A.1 - Características de uma Onda.

63
� = Ç� = ËÌ [A.2]
A tarefa de modelar o comportamento ondulatório de um clima de ondas é
extremamente complexo e, devido à sua aleatoriedade, apenas é possível obter um
comportamento razoável através de uma análise estatística.
No movimento das ondas, as partículas de água descrevem trajectórias
aproximadamente fechadas. Em águas profundas (h>λ/2), as órbitas das partículas são
circulares. O raio das órbitas decresce exponencialmente com a distância à superfície, mais
precisamente com exp(2πz/λ). De notar que, no caso do dispositivo em estudo, a direcção da
onda não é relevante pois é um corpo flutuante.
A.1.1. Teoria linear da ondas
Na teoria linear, admite-se a profundidade constante h, a água como um fluido perfeito
e incompressível (div V =0), escoamento irrotacional ( rot V=0 ou V=grad Í ). Combinando as
duas últimas assumpções anteriores, obtém-se a equação de Laplace, Î�Í = 0.
Em relação às condições de fronteira, considera-se a pressão superficial igual à
atmosférica (� = �6t9) e a velocidade vertical no fundo nula (condição de impermeabilidade), ∙ ��� = 0. Como a superfície livre é desconhecida, assume-se como sendo plana com
correcção na pressão hidrostática. Esta assumpção é válida para amplitudes de onda muito
menores que o comprimento de onda. Aplicando estas condições de fronteira na equação de
Laplace resulta, para uma onda sinusoidal simples, a função potencial
Ð = �+d ∙ cosh[Æ�~ + ℎ�] ∙ sin��+ − Æ� − Ò3� [A.3]
sendo Ò3 o ângulo de fase.
A variação da superfície livre ao longo do tempo, numa determinada posição, é dada
por:
Ó�x, t� = Asin��+ − Æ� + Ò3�. [A.4]
Em águas profundas, integrando a coordenada vertical e tomando a média no tempo, o
fluxo de energia por unidade de largura de onda vem dado por:
4 = � �� ������ (W/m) [A.5]
notando a proporcionalidade de E com �� e com �.

64
A.1.2. Ondas reais irregulares
No âmbito da teoria linear, é possível simular ondas reais com recurso à sobreposição
de ondas regulares desfasadas entre si e com diferentes amplitudes e períodos.
Deste modo, para uma série finita de N ondas regulares, tem-se um espectro
descontínuo da forma
Ó�x, t� = ∑ AÖ,×sin���+ − Æ�� + Ò����k� [A.6]
onde se adoptam valores aleatórios para as fases Ò� (0 ≤ Ò� ≤ 2E).
Em vez do espectro de amplitude, é comum definir-se o espectro de potência ÙÚ���.
Este é obtido através da aplicação de técnicas de análise espectral a registos de medições da
elevação da superfície de determinados pontos.
O espectro de Pierson-Moskowitz é muito utilizado para estudos de energia e é dado
por:
ÙÚ��� = 263,0�����#1�#� expW−1054��#1�#1Z [A.7]
onde �� é a altura significativa (m) e �� é o período de energia (s).
No presente trabalho é simulado um estado de mar caracterizado por �� = 2& e �� = 10e. Subtituindo estes valores na equação [A. 6], obtém-se a respectiva distribuição
espectral, fig.A.2.
Pode-se verificar através da fig.2.2 que o fluxo de energia tem uma densidade
espectral máxima para ω=0.6 rad/s (ou T≈ 10.5 e ). À escala 1:100, os espectros de potência
alteram-se de acordo com a escala das variáveis.
Para o espectro de Pierson-Moskowitz em águas profundas, o fluxo de energia (kW) é
dado por: 4 = 0,49����� �ƹ/& � [A. 8]
Figura A.2 – Espectro de potência para Þß = ÅP e àá = âãß .

65
Tem-se então para a escala real um fluxo de energia de 19,6 (kW/m) e para a escala
1:100 um fluxo de 0,196 W/m. Deste modo, é possível concluir que no ensaio à escala 1:100
no canal de ondas, não é viável simular a extracção de energia, pois esta é muito reduzida.
A.2. Dinâmica do corpo oscilante
Na análise que se segue consideram-se as ondas incidentes como sendo sinusoidais
(regulares). São desprezados os efeitos viscosos e de atrito, que segundo a teoria linear das
ondas têm valor nulo, pois o fluido é considerado perfeito. Assim, o movimento vertical do
corpo (movimento de arfagem) é dado por:
&y� = �ä�+� + �8�+� [A. 9]
sendo & a massa do corpo, y� a aceleração, �ä é a componente vertical da força hidrodinâmica
que a água exerce sobre o corpo e �8 é a componente vertical da força exercida sobre o corpo
pelo balastro. Supondo que �8�+� é contínua e que as suas derivadas também são contínuas, a
força genérica �8 pode expandir-se em série de Fourier e, dentro da aproximação linear, o
movimento do flutuador é a soma dos movimentos associados a cada uma das componentes
da série de Fourier.
Com base na teoria linear das ondas, a qual considera ondas de pequena amplitude, a
força hidrodinâmica pode ser linearizada como sendo:
�ä�+� = �A�+� + �:�+� + �å��+� [A. 10] O termo �A�+� representa a força de difracção ou excitação, ou seja, a força
hidrodinâmica devido à incidência das ondas sobre o corpo, �A�+�, quando este se encontrar
fixo na sua posição de equilíbrio. O termo �:�+� é a força de radiação, ou melhor, a força devida
ao movimento oscilante do corpo na ausência de ondas incidentes. O último termo, �å�, é a
força hidrostática que é proporcional à variação da distância em relação à posição de equilíbrio
da esfera, ou seja, proporcional à distância vertical em relação ao seu centro de massa. Devido
à condição de fluido perfeito não se consideram forças viscosas e de atrito na equação [A. 10].
A força de excitação �A�+� pode ser escrita no domínio da frequência na seguinte
forma: �A�+� = A dKæt [A. 11]
onde A é uma amplitude complexa. Sendo o sistema linear, esta amplitude é proporcional à
amplitude das ondas incidentes Aç, podendo-se escrever:
|A| = Γ��� Aç [A. 12]

66
onde Γ��� é o coeficiente da força de excitação que, para o caso de corpos de simetria vertical
e com apenas um grau de liberdade, pode ser dado por:
Γ��� = ²2� ������ ³�/� [A. 13]
A força de radiação �:�+� pode ser decomposta como:
�:�+� = −0���y� − ����y� [A. 14]
em que 0��� representa o efeito de inércia da água que é empurrada/arrastada pelo
movimento oscilante do corpo, denominada de massa adicional, e ���� é o coeficiente de
amortecimento de radiação que está associado à radiação de ondas produzidas pelo
movimento em arfagem do corpo. Ambos os coeficientes hidrodinâmicos dependem da
geometria do corpo e da sua frequência.
No caso de corpos axissimétricos, muitos dos coeficientes que definem a matriz de
impedância de radiação são nulos quando considerados os seis graus de liberdade, ou seja, a
força de radiação originária do movimento num dado modo de oscilação no corpo interfere com
o movimento de outro, originando um sistema de equações difícil de resolver. No caso
bidimensional, o corpo axissimétrico torna-se simétrico em relação a um plano e deixa de existir
essa interferência (caso dos dois graus de liberdade considerados, de arfagem e de avanço),
ficando os coeficientes hidrodinâmicos desacoplados.
A força hidrostática �å� depende da posição do corpo e, numa versão linearizada, pode
ser escrita da forma: �å� = −��Ùy [A. 15]
onde S é a área transversal do corpo.
De volta à equação [A. 9], tem-se então:
&y� = �A − 0���y� − ����y� − ��Ùy + �8 [A. 16]
para uma componente de �8, da série de Fourier, de amplitude L3 e velocidade angular �.
Como y�+� = Xd�L3dKæt�, a amplitude complexa L3 pode ser obtida como sendo:
L3 = A−��W& + 0���Z + ������ + ��Ùy + �8 [A. 17]
A frequência de ressonância que maximiza a amplitude de oscilação é:

67
�� = ± ��Ù& + 0��� [0. 18]
A teoria aqui explanada foi a considerada na concepção e cálculos utilizados na experiência.

68
Apêndice B
B.1. Desenhos Técnicos dos constituintes do balastro
Figura B1 – Invólucro do balastro

69
Figura B2 – Articulação do balastro

70
Figura B3 – Manivela do balastro

71
B.2. Desenhos Técnicos da estrutura para suporte e
funcionameno do balastro
Figura B4 – Base que sustenta o balastro

72
Figura B5 – Suporte do balastro

73