Embed Size (px)
Citation preview

UNIVERSIDADE LUTERANA DO BRASIL
FRANCISCO BOHRER REMUS
LUCAS DE LIMA GONÇALVES
THIAGO RODRIGUES RAMOS
MECANISMOS
ENGRENAGENS CÔNICAS E PAR SEM-FIM
Canoas
2010

FRANCISCO BOHRER REMUS
LUCAS DE LIMA GONÇALVES
THIAGO RODRIGUES RAMOS
MECANISMOS
ENGRENAGENS CÔNICAS E PAR SEM-FIM
Trabalho de pesquisa apresentado para
aprovação da disciplina de Mecanismos
junto ao departamento de engenharia
mecânica da Universidade Luterana do
Brasil.
Orientado por:
Dr. Gilnei Carvalho Ocácia
Canoas
2010
UNIVERSIDADE LUTERANA DO BRASIL - ULBRA
PRÓ-REITORIA DE GRADUAÇÃO
ENGENHARIA MECÂNICA
DADOS DE IDENTIFICAÇÃO
AUTORIA
NOMES: Francisco Bohrer Remus
Lucas de Lima Gonçalves
Thiago Rodrigues Ramos
DEPARTAMENTO DA INSTITUIÇÃO
ENGENHARIA MECÂNICA E AUTOMOTIVA
Data: 11/11/2010
DISCIPLINA
MECANISMOS
SUPERVISÃO
Dr. Gilnei Carvalho Ocácia
Canoas, novembro de 2010
RESUMO
Este documento é uma pesquisa sobre engrenagens cônicas e par sem-fim,
com uma abordagem direcionada à solução de problemas específicos destes tipos
de engrenamentos.
O trabalho de pesquisa apresenta uma análise de três autores, como
referencial teórico. O desenvolvimento é apresentado de forma simplificada, sendo
subdividido em nove capítulos que tratam sobre engrenamentos, engrenagens
cônicas e engrenagens sem-fim. Durante o desenvolvimento são tratados os
seguintes temas: os fundamentos de engrenamentos, fazendo um apanhado geral
sobre conceito, terminologia dos dentes, relações geométricas, lei fundamental de
engrenamento, análise de forças e trens de engrenagens. O foco principal do
trabalho é a análise de dois tipos de engrenamentos: engrenagens cônicas e par
sem-fim. Esta análise é feita sobre o conceito e a cinemática destes mecanismos,
através das relações geométricas. Entretanto uma pequena síntese dinâmica das
forças atuantes é feita, uma vez que, algumas considerações geométricas
dependem das cargas aplicadas. Por fim, é realizado um estudo de caso para cada
tipo de engrenagem, a fim de, exemplificar as teorias expostas.
Os casos estudados são de dois redutores. O primeiro é um redutor
monobloco de engrenagens cônicas, acoplado em um motor de 3hp à 600rpm, com
uma redução de 5:1, que resultou em uma força transmitida de 1301,88N. No
segundo caso, foi analisado um redutor sem-fim, que acoplado à um motor de 1hp à
1750rpm, com redução de 50:1, resultou em um torque de saída de 57,52Nm, com
eficiência de 32,04%.
Palavras-chave:
engrenamento – engrenagens cônicas – engrenagens sem-fim
ABSTRACT
This document is a research on bevel and worm pair, with a targeted
approach to solving problems specific to these types of gearing.
The research presents an analysis of three authors, as theoretical. The
development is shown in simplified form, being divided into nine chapters that deal
with gearing, bevel gears and worm gears. During development are treated the
following topics: the basics of gearing, doing an overview on the concept, terminology
of the gear teeth, geometric relationships, the fundamental law of gearing, analysis of
forces and gear trains. The main focus of work is the analysis of two types of gearing,
bevel and wormsets. This analysis is based on the concept and kinematics of these
mechanisms, through the geometric relationships. However a short summary of the
dynamic forces at work is done, since some geometrical considerations depend on
the applied loads. Finally, we conducted a case study for each type of gear, so,
exemplify the theories expounded.
The case studies are two gearboxes. The first is a single block of bevel gear,
engaged in a 3hp motor to 600rpm, with a reduction of 5:1, which resulted in a force
transmitted to 1301.88 N. In the second case was analyzed a worm gear, which
coupled to a 1hp engine to 1750rpm, with a reduction of 50:1, resulted in an output
torque of 57.52 Nm, with an efficiency of 32.04%.
Keywords:
gearing – bevel gears – worm gears

ÍNDICE DE ILUSTRAÇÕES
Figura 1 - Par de engrenagens cônicas de dentes helicoidais. ............................................................ 20
Figura 2 - Configuração de engrenagem padrão. ................................................................................. 22
Figura 3 - Terminologia dos dentes de engrenagens. .......................................................................... 22
Figura 4 - Circunferência primitiva. ....................................................................................................... 23
Figura 5 - Alturas de adendo e dedendo. .............................................................................................. 24
Figura 6 - Velocidade tangencial Vt e força tangencial Ft de um par de engrenagens. ........................ 27
Figura 7 - Came A e seguidor B em contato. ........................................................................................ 31
Figura 8 - Desenho de construção de curva evolvente. ....................................................................... 32
Figura 9 - Relação entre o ângulo de pressão e a circunferência primitiva. ......................................... 32
Figura 10 - Representação dos ângulos de afastamento e aproximação na interação entre dentes. . 34
Figura 11 – Interferência na ação de dentes de engrenagens. ............................................................ 35
Figura 12 - Razão de contato. ............................................................................................................... 38
Figura 13 – Diagrama de corpo livre para forças atuantes no engrenamento. .................................... 40
Figura 14 – Trem de engrenagens. ....................................................................................................... 44
Figura 15 – Trem de engrenagens planetárias. .................................................................................... 45
Figura 16 – Par de engrenagens cônicas de dentes retos. .................................................................. 46
Figura 17 - Engrenagem cônica de dentes retos. ................................................................................. 47
Figura 18 - Engrenagens cônicas espirais ............................................................................................ 48
Figura 19 - Corte de dentes de engrenagens cônicas espirais sobre a cremalheira de topo básica. .. 48
Figura 20 - Engrenagens cônicas zerol. ............................................................................................... 49
Figura 21 - Engrenagens hiperbolóides. ............................................................................................... 50
Figura 22 - Comparação de engrenagens entre eixos interceptantes e inversos do tipo cônico. ........ 50
Figura 23 - Terminologia de engrenagens cônicas de dentes retos. .................................................... 51
Figura 24 - Forças atuantes nos dentes de engrenagens cônicas de dentes retos. ............................ 54
Figura 25 - Operador de engrenagem cônica. ...................................................................................... 56
Figura 26 - Esquema de diferencial de engrenagens cônicas para automóveis. ................................. 56
Figura 27 - Redutor de engrenagens cônicas. ...................................................................................... 57
Figura 28 - Engrenagem Sem-Fim ........................................................................................................ 60
Figura 29 - Terminologia das engrenagens sem-fim. ........................................................................... 62
Figura 30 - Representação gráfica da largura da face de uma coroa sem-fim. ................................... 64
Figura 31 - Forças atuantes em um cilindro primitivo de um parafuso sem-fim. .................................. 65
Figura 32 - Velocidade de deslizamento em engrenamento de par sem-fim. ...................................... 69
Figura 33 - Valores do coeficiente de atrito para engrenagens sem-fim. ............................................. 69
Figura 34 - Diferencial de Torsen. ......................................................................................................... 70
Figura 35 - Esquema de limpador de para brisas. ................................................................................ 71
Figura 36 - Hodômetro mecânico. ......................................................................................................... 72

Figura 37 - Redutor de engrenagens sem-fim. ..................................................................................... 72
Figura 38 - Redutor de engrenagens cônicas. ...................................................................................... 74

ÍNDICE DE TABELAS
Tabela 1 – Proporções de dimensões de dentes para engrenagens cônicas de dentes retos. ........... 53
Tabela 2 – Considerações para resolução do estudo de caso: redutor monobloco. ............................ 57
Tabela 3 – Ângulos de pressão recomendados para dentes de engrenagens sem-fim. ..................... 64
Tabela 4 – Eficiência de pares de engrenagens sem-fim para 0,5. ............................................... 68
Tabela 5 – Considerações para resolução do estudo de caso: redutor de engrenagens sem-fim. ..... 73
ÍNDICE DE EQUAÇÕES
Equação 3-01 – Passo diametral ........................................................................................................... 24
Equação 3-02 – Módulo ......................................................................................................................... 24
Equação 3-03 – Passo circular .............................................................................................................. 24
Equação 3-04 – Altura de adendo ......................................................................................................... 25
Equação 3-05 – Altura de dedendo ....................................................................................................... 25
Equação 3-06 – Altura total do dente ..................................................................................................... 25
Equação 4-01 – Relação de transmissão .............................................................................................. 28
Equação 4-02 – Velocidade no círculo primitivo .................................................................................... 28
Equação 4-03 – Razão de velocidades ................................................................................................. 28
Equação 4-04 – Razão de torque transmitido ........................................................................................ 29
Equação 4-05 – Razão de engrenamento ............................................................................................. 30
Equação 4-06 – Raio de base ................................................................................................................ 33
Equação 4-07 – Número mínimo de dentes .......................................................................................... 34
Equação 4-08 – Comprimento de ação ................................................................................................. 37
Equação 4-09 – Distância entre centros ................................................................................................ 37
Equação 4-10 – Passo de base ............................................................................................................. 37
Equação 4-11 – Razão de contato ......................................................................................................... 38
Equação 4-12 – Razão de contato simplificada ..................................................................................... 38
Equação 6-01 – Força tangencial .......................................................................................................... 41
Equação 6-02 – Força tangencial transmitida ........................................................................................ 41
Equação 6-03 – Torque transmitido ....................................................................................................... 41
Equação 6-04 – Potência transmitida em função da velocidade angular .............................................. 42
Equação 6-05 – Potência transmitida em função da velocidade no círculo primitivo ............................ 42
Equação 6-06 – Potência transmitida em função das revoluções ......................................................... 42
Equação 7-01 – Relação de revoluções de par de engrenagens .......................................................... 43
Equação 7-02 – Relação de transmissão de trem de engrenagens ...................................................... 44
Equação 7-03 – Relação de transmissão de trem de engrenagens simplificada .................................. 44
Equação 7-04 – Relação de transmissão de trem de engrenagens planetárias ................................... 45
Equação 8-01 – Ângulos primitivos de cone para engrenagens cônicas .............................................. 52
Equação 8-02 – Número de dentes virtuais para engrenagens cônicas ............................................... 52
Equação 8-03 – Largura da face do dente para engrenagens cônicas ................................................. 53
Equação 8-04 – Distância de cone para engrenagens cônicas ............................................................. 53
Equação 8-05 – Força tangencial para engrenagens cônicas ............................................................... 55
Equação 8-06 – Força radial para engrenagens cônicas ...................................................................... 55
Equação 8-07 – Força axial para engrenagens cônicas ........................................................................ 55
Equação 9-01 – Diâmetro primitivo da coroa sem-fim ........................................................................... 63

Equação 9-02 – Diâmetro primitivo do parafuso sem-fim ...................................................................... 63
Equação 9-03 – Avanço para engrenagens sem-fim ............................................................................. 63
Equação 9-04 – Ângulo de avanço para engrenagens sem-fim ............................................................ 63
Equação 9-05 – Largura de face sem-fim .............................................................................................. 64
Equação 9-06 – Componentes da força resultante sem atrito para engrenagens sem-fim .................. 65
Equação 9-07 – Componentes da força resultante oposta sem atrito para engrenagens sem-fim ...... 66
Equação 9-08 – Componentes da força resultante com atrito para engrenagens sem-fim .................. 66
Equação 9-09 – Força resultante com atrito para engrenagens sem-fim .............................................. 67
Equação 9-10 – Força resultante com atrito para parafuso sem-fim ..................................................... 67
Equação 9-11 – Eficiência para engrenagens sem-fim ......................................................................... 67
Equação 9-12 – Velocidade de deslizamento para engrenagens sem-fim ........................................... 68
LISTA DE SÍMBOLOS
– Passo diametral
– Módulo
– Passo circular
– Diâmetro primitivo
– Número de dentes
– Altura de adendo
– Altura de dedendo
– Altura total do dente
– Relação de transmissão
– Velocidade no circulo primitivo
– Raio do circulo primitivo
– Velocidade angular
– Razão de velocidades
– Razão de torque transmitido
– Razão de engrenamento
– Raio do círculo de base
– Número mínimo de dentes
– Ângulo de pressão
– Comprimento de ação
– Distância entre centros
– Passo de base
– Razão de contato
– Força resultante

– Força tangencial
– Força radial
– Força axial
– Força resultante transmitida
– Força tangencial transmitida
– Força radial transmitida
– Força axial transmitida
– Torque transmitido
– Potência transmitida
– Revoluções
– Ângulo primitivo de cone do pinhão (motriz)
– Ângulo primitivo de cone da coroa (movida)
– Número de dentes virtuais
– Raio do cone traseiro
– Largura da face de dente
– Distância de cone
– Raio primitivo no ponto médio do dente
– Passo circular transversal
– Avanço
– Passo axial
– Ângulo de avanço
– Coeficiente de atrito
– Eficiência
– Velocidade de deslizamento
– Velocidade do parafuso sem-fim na linha primitiva
– Velocidade do coroa sem-fim na linha primitiva

SUMÁRIO
INTRODUÇÃO ......................................................................................................................... 15
1. REFERENCIAL TEÓRICO ............................................................................................... 16
1.1. Engrenagens em Geral .................................................................................................... 16
1.2. Engrenagens Cônicas ...................................................................................................... 17
1.3. Engrenagens Sem-fim ...................................................................................................... 18
2. DESCRIÇÃO DE ENGRENAMENTO .............................................................................. 20
2.1. Engrenagens .................................................................................................................... 20
2.2. Tipos de Engrenagens ..................................................................................................... 21
3. CONFIGURAÇÃO DAS ENGRENAGENS ....................................................................... 22
3.1. Circunferência Primitiva .................................................................................................... 23
3.2. Passo Diametral, Passo Circular e Módulo ...................................................................... 23
3.3. Adendo e Dedendo ........................................................................................................... 24
3.4. Círculo de Folga ............................................................................................................... 25
3.5. Vão entre os Dentes e Folga no Vão ............................................................................... 25
4. TEORIA DO DENTE DE ENGRENAGEM ....................................................................... 27
4.1. Lei Fundamental do Engrenamento ................................................................................. 27
4.2. Relação de Transmissão .................................................................................................. 27
4.3. Velocidade no Círculo Primitivo ....................................................................................... 28
4.4. Razão de Torque Transmitido .......................................................................................... 29
4.5. Fator e Razão de Engrenamento ..................................................................................... 29
4.6. Ação Conjugada e Perfil Evolvente .................................................................................. 30
4.7. Ângulo de Pressão ........................................................................................................... 32
4.8. Número de Dentes e Ângulo de Pressão ......................................................................... 33
4.9. Interferência em Dentes Evolventes ................................................................................ 35
4.10. Comprimento de Ação .................................................................................................... 36
4.11. Passo de Base ............................................................................................................... 37
4.12. Razão de Contato ........................................................................................................... 37
5. RELAÇÃO ENTRE PERFIL E LARGURA DA FACE DO DENTE ................................... 39
6. POTÊNCIA TRANSMITIDA .............................................................................................. 40
7. TREM DE ENGRENAGENS ............................................................................................ 43

8. ENGRENAGENS CÔNICAS ............................................................................................ 46
8.1. Conceito............................................................................................................................ 46
8.2. Relações Geométricas ..................................................................................................... 51
8.3. Análise de Força ............................................................................................................... 54
8.4. Aplicação .......................................................................................................................... 55
8.5. Estudo de Caso ................................................................................................................ 57
8.5.1. Solução ........................................................................................................................... 58
8.5.2. Conclusão ....................................................................................................................... 59
9. ENGRENAGENS SEM-FIM ............................................................................................. 60
9.1. Conceito............................................................................................................................ 60
9.2. Relações Geométricas ..................................................................................................... 61
9.3. Análise de Força ............................................................................................................... 65
9.4. Aplicação .......................................................................................................................... 70
9.5. Estudo de Caso ................................................................................................................ 73
9.5.1. Solução ........................................................................................................................... 74
9.5.2. Conclusão ....................................................................................................................... 77
CONCLUSÃO .......................................................................................................................... 78
OBRAS CONSULTADAS ......................................................................................................... 81

15
INTRODUÇÃO
Engrenagens são rodas com dentes padronizados que servem para
transmitir movimento rotativo e força entre eixos, sendo eles paralelos, não-paralelos
ou interceptantes. Muitas vezes, as engrenagens são utilizadas para variar o número
de rotações e o sentido de rotação de um eixo para outro. Estes mecanismos são os
mais eficientes transmissores e mesmo sendo bastante antigos, sofrem constantes
evoluções.
A transmissão de movimento rotativo de um eixo para outro ocorre
em quase toda máquina que se possa imaginar. As engrenagens
constituem um dos melhores meios dentre os vários disponíveis para essa
transmissão (SHIGLEY, 1984, p. 445).
O trabalho de pesquisa tem como objetivo explanar o conhecimento sobre a
cinemática das engrenagens cônicas, em seus diversos tipos, bem como o
conhecimento sobre a cinemática das engrenagens sem-fim. Também tem o objetivo
de introduzir os fundamentos de engrenamentos, como auxilio no entendimento do
assunto exposto.
O método adotado para este trabalho é de analisar cinematicamente os
engrenamentos por engrenagens, cônicas e sem-fim, através da literatura usada
para consulta. Todo outro método não presente é de conhecimento comum ao leitor,
uma vez visto que, conhecimentos básicos em geometria, álgebra e física
newtoniana são triviais.
A pesquisa, assim como o trabalho, foi dividida de forma coerente no texto.
Em busca da plena compreensão, inicia-se o estudo pelo referencial teórico, onde
são expostas as interpretações dos autores consultados, sobre os temas tratados.
Seqüencialmente foram descritos os fundamentos sobre engrenagens, divido em:
descrição de engrenamento, configuração das engrenagens, teoria do dente de
engrenagem, determinação do perfil e largura da face do dente. Por fim, o ponto
central onde é feita a análise cinemática e um estudo de caso das engrenagens
cônicas e sem-fim, sendo seguido da conclusão.

16
1. REFERENCIAL TEÓRICO
As obras consultadas para o presente trabalho foram muitas, porém três
obras, de diferentes autores, foram as principais fontes de consulta. Dentre as obras
consultadas também se buscou conhecimento em materiais diversos, como páginas
de internet e artigos publicados.
Descaram-se os livros, Projeto de Engenharia Mecânica de Joseph E.
Shigley1, Projeto de Máquinas de Robert L. Norton2 e Mecanismos de Hamilton H.
Mabie3, pois abordam suficientemente o assunto tratado neste trabalho, servindo
como uma fonte rica de pesquisa.
Shigley trata separadamente os temas sobre engrenamentos, de forma
coesa, seccionam o estudo em fundamentos e espécimes. Como neste documento
serão tratadas as engrenagens cônicas e sem-fim, é necessária uma introdução aos
fundamentos dos engrenamentos. Desta forma, o mesmo acontece no referencial
teórico analisado a seguir, que está dividido em três abordagens distintas, uma
sobre engrenagens em geral, outra sobre engrenagens cônicas e por fim,
engrenagens sem-fim.
1.1. Engrenagens em Geral
Joseph E. Shigley faz uma abordagem ampla sobre engrenagens em geral
em seu livro, Projeto de Engenharia Mecânica, descrevendo as relações cinemáticas
e as transmissões de carregamento nos quatro principais tipos de engrenagens:
cilíndricas de dentes retos, helicoidais, cônicas e par sem-fim. Porém o autor não
cita a respeito das engrenagens pinhão-cremalheira, que seria o quinto tipo de
engrenamento. Shigley procura ser capaz de transmitir o conhecimento necessário
para a classificação e aplicação de engrenagens em projetos, descrevendo desde a
1 Joseph E. Shigley (1909-1994), professor emérito na Universidade de Michigan e membro da
American Society of Mechanical Engineers (ASME). Autor de Projeto de Engenharia Mecânica (Mechanical Engineering Design), 2005.
2 Robert L. Norton, professor no Instituto Politécnico de Worcester (WPI), membro da ASME e da
Society of Automotive Engineers (SAE). Autor de Projeto de Máquinas (Machine Design: An Integrated Approach), 2000.
3 Hamilton H. Mabie, professor no Instituto Politécnico e Universidade Estadual de Virginia e membro
da ASME. Autor de Mecanismos e Dinâmica de Máquinas (Mechanisms and Dynamics of Machinery), 1998.
17
nomenclatura e propriedades geométricas até as razões de transmissão de
velocidade e forças.
A abordagem sobre engrenamentos de por Robert L. Norton difundida no
livro Projeto de Máquinas é realizada separadamente para cada tipo de
engrenagem. Porém o autor faz um apanhado geral da lei fundamental de
engrenamento e relações geométricas no capítulo sobre engrenagens cilíndricas
retas. Segundo o autor todas as engrenagens podem ser analisadas a partir dos
conceitos das engrenagens cônicas, se suas características geométricas próprias
forem consideradas.
Para Hamilton H. Mabie toda engrenagem é dispositivo mecânico que
transmite, reduz ou multiplica força. Para uma mesma potência, se aumentada for, a
rotação teremos um torque baixo, se diminuída a rotação aumenta-se o torque. O
autor diz que engrenamentos são divididos em: engrenagens cilíndricas,
engrenagens cônicas e acoplamento parafuso sem-fim. Todas têm variações nos
tipos de dentes, como explicam a maioria dos autores que abordam este tema.
Mabie faz referência sobre uma análise geométrica clássica, abordando temas
desde a definição de circunferência primitiva à fator de engrenamento.
1.2. Engrenagens Cônicas
De acordo com Joseph E. Shigley as engrenagens cônicas são elementos
utilizados para transmitir movimento entre eixos interceptantes e estão dividas em
cinco tipos: cônicas de dentes retos, cônicas espiraladas, cônicas zerol, cônicas
hipóides e cônicas espiróides. O autor faz a análise deste tipo de engrenagens de
duas formas, cinematicamente e dinamicamente. Na primeira são consideradas as
relações geométricas, como número de dentes, ângulos de pressão e relação de
transmissão, entre outras. Já na segunda análise, o autor, define quais esforços
estas engrenagens estão submetidas, e utiliza a equação da American Gear
Manufacturers Association4 (AGMA) como padronização do método de cálculo.
Segundo Robert L. Norton, as engrenagens cônicas retas tem seus dentes
cortados paralelos ao eixo do cone, engrenagens cônicas espirais tem seus dentes
4 American Gera Manufacturers Association (AGMA) é uma associação que ajuda a definir padrões
nacionais de fabricação de engrenagens desde 1916. A associação também serve o ponto focal dentro dos Estados Unidos para o desenvolvimento de orientar os padrões ISO.

18
cortados em ângulo de espiral em relação ao eixo do cone. O contato entre as
engrenagens cônicas retas ou espirais tem os mesmos atributos que as usas
contrapartes, as cilíndricas.
Para Mabie as engrenagens cônicas são pares usados para conectar
árvores, cujos eixos se interceptam ângulo entre o eixo é definido como o ângulo
entre linhas de centro das engrenagens em contato. Embora o ângulo entre eixos
seja usualmente 90°, há muitas aplicações de engrenagem cônicas que requerem
ângulos maiores ou menores que este valor. A superfície primitiva de uma
engrenagem cônica é um cone. Quando duas engrenagens cônicas se engrenam,
seus cones fazem contato ao longo de uma linha comum e há um vértice também
comum onde as linhas de centro das engrenagens se encontram. Os cones rolam
um sobre o outro sem deslizarem e tem movimento esférico. Cada ponto em uma
engrenagem cônica manter uma distancia constante do vértice comum. A
abordagem sobre engrenagens cônicas de Mabie é bastante completa, onde cita o
sistema Gleason5 como padrão para este tipo de engrenamento.
1.3. Engrenagens Sem-fim
Engrenagens sem-fim para Shigley, ou par de engrenagens sem-fim, como o
autor se refere, são o quarto tipo básico de engrenagens, sendo mais utilizados
quando as razões de velocidade dos dois eixos são bastante altas. Seu pinhão
assemelha-se a um parafuso sem-fim, e a coroa deste par de engrenagens tem sua
rotação dependente da rotação do parafuso e de forma e direção de corte de seus
dentes. Shigley também se refere aos conjuntos destas engrenagens como
envelopes, único e duplo, e por terem o parafuso e a corão com a mesma mão de
hélice, se parecem com um par de engrenagens helicoidais cruzadas. Assim como
na abordagem feita em relação as engrenagens cônicas o autor define os esforços
que estas engrenagens estão submetidas pela equação AGMA
Para Robert L. Norton, o sem-fim é similar a uma rosca de parafuso, ele se
acopla com uma engrenagem especial, que é análogo a uma porca sendo avançada
pela rosca do sem-fim. Se o ângulo de avanço do sem fim for pequeno o suficiente,
5 Sistema Gleason de engrenagens cônicas, (Engineering Design), é o padrão para projetos
engrenagens cônicas nos Estados Unidos, da Corporation Gleason. O sistema emprega um ângulo de pressão padrão de 20°, com curto e longo adendo para razões diferentes de 1:1.
19
o engrenamento pode ser de travação automática, ele não pode ser movido para
trás e ele suporta carga.
O parafuso se fim para Mabie, como em uma engrenagem helicoidal, se um
dente faz uma revolução completa no cilindro primitivo, a engrenagem resultante é
conhecida como parafuso sem fim. A engrenagem que se acopla com o parafuso
sem fim é denominada coroa sem fim, entretanto a coroa não é uma engrenagem
helicoidal. A coroa e parafuso sem fim são usados para conectar eixos não paralelos
e que não se interceptam, e que estão usualmente em ângulos retos. A redução é
geralmente muito grande. A relação entre uma engrenagem cilíndrica de dentes
retos ou helicoidal e sua fresa, durante o corte, é semelhante á relação entre um
parafuso sem fim e a coroa. Os parafusos sem fim que são verdadeiras
engrenagens helicoidais envolventes, podem ser usadas para acionar engrenagens
cilíndricas de dentes retos ou helicoidais, mas obviamente resulta contato pontual, o
que é insatisfatório do ponto de vista útil.

20
2. DESCRIÇÃO DE ENGRENAMENTO
A palavra engrenar vem do verbo francês engrener, cujo significado é
endentar, entrosar ou engranzar. Na mecânica o significado de engrenamento é a
transmitir movimento de rotação por meio de rodas dentas, ou engrenagens.
As engrenagens têm uma história longa. A ancestral Carroça
Chinesa Apontando para o Sol, supostamente usada para navegar pelo
deserto de Gobi nos tempos pré-Biblicos, continha engrenagens. Leonardo
Da Vinci mostra muitos arranjos de engrenagens em seus desenhos. As
primeiras engrenagens eram provavelmente feitas cruamente de madeira e
outros materiais fáceis de serem trabalhados, os seus dentes sendo
meramente uns pedaços de madeira inseridos em um disco ou roda. Não foi
até a revolução industrial que as máquinas demandaram, e que as técnicas
de manufatura permitiram, a criação de engrenagens tal como agora as
conhecemos, com dentes especialmente moldados ou cortados em um
disco de metal (NORTON, 2000, p. 597).
2.1. Engrenagens
Engrenagens são mecanismos para transmissão de movimento e força entre
eixos através de elementos padronizados, chamados dentes. Na grande maioria de
suas aplicações, as engrenagens são utilizadas para variar as rotações em número
e sentido nos eixos em que estão empregadas. A Figura 1 mostra um par de
engrenagens cônicas de dentes helicoidais.
Figura 1 - Par de engrenagens cônicas de dentes helicoidais.

21
2.2. Tipos de Engrenagens
Engrenagens cilíndricas de dentes retos são compostas de dentes paralelos
ao eixo de rotação e aplicam-se na transmissão entre eixos paralelos.
Engrenagens cilíndricas de dentes helicoidais são compostas por dentes
inclinados em relação ao eixo de rotação e sua aplicação é semelhante das de
dentes retos, porém têm a característica de serem mais silenciosas.
Engrenagens cônicas são aquelas com as superfícies dos seus dentes têm
formato cônico e servem na utilização de transmissão de movimento e força entre
eixos interceptantes (concorrentes).
Engrenagens sem-fim são engrenamentos que possuem o elemento motriz
semelhante ao um parafuso e servem para transmitir movimento rotativo entre eixos
não-paralelos e não-interceptantes. Este tipo de engrenagem é bastante usado
quando a relação de transmissão de velocidades é bastante elevada.
Engrenagens pinhão-cremalheira são engrenamento onde a coroa tem
diâmetro infinito, tornando-se reta. Seus dentes podem ser retos ou inclinados,
assim seu dimensionamento é semelhante as engrenagens cilíndricas de dentes
retos ou inclinados. Com esse tipo de engrenamento pode se transformar
movimento rotativo e translacional.

22
3. CONFIGURAÇÃO DAS ENGRENAGENS
As engrenagens são constituídas de elementos básicos, que podem variar
de geometria e tamanho. Observe a configuração da engrenagem padrão exibido na
Figura 2.
Figura 2 - Configuração de engrenagem padrão.
Toda a transferência de movimento e força é realizada diretamente pelo
contato entre os dentes engrenados, tornando-os os principais elementos do
engrenamento. A geometria do dente é extremamente importante à eficiência da
transmissão. Desta forma, sua fabricação deve ser rigorosa, não podendo haver
variações nas distâncias entre os dentes e principalmente nos perfis.
Sua geometria é descrita por Shigley[1] de forma precisa na imagem da
Figura 3, de modo que permite uma total compreensão das dimensões e
nomenclaturas das regiões que compõem os dentes de uma engrenagem.
Figura 3 - Terminologia dos dentes de engrenagens.

23
3.1. Circunferência Primitiva
A circunferência primitiva, ou de passo (pitch circle), serve de base na
medição das engrenagens. Este perímetro é teoricamente onde todos os cálculos
são gerados e seu diâmetro é chamado de diâmetro primitivo.
As circunferências primitivas são tangentes entre si quando duas
engrenagens estão engrenadas, conforme mostra a Figura 4.
Figura 4 - Circunferência primitiva.
3.2. Passo Diametral, Passo Circular e Módulo
O passo diametral é a razão entre o número de dentes da engrenagem e o
diâmetro primitivo. Logo, é recíproco do módulo.
O passo circular de uma engrenagem é a distância, medida na
circunferência primitiva, entre pontos correlativos de dentes vizinhos. Outra análise
pode-se estabelecer que o passo seja a soma da espessura do dente com o vão
frontal.

24
O módulo é a razão entre o diâmetro primitivo da engrenagem e o número
de dentes.
(3-01)
(3-02)
(3-03)
Onde:
- Passo diametral, dentes por mm
- Módulo, mm
- Passo Circular, mm por dentes
- Diâmetro primitivo, mm
- Número de dentes
3.3. Adendo e Dedendo
A altura de adendo, ou altura da cabeça, é mostrada na Figura 5 sendo
definida como a distância radial entre a circunferência primitiva e a circunferência de
adendo, ou da cabeça. Visualmente esta altura encontra-se na região que determina
o perfil lateral da face do dente.
A altura de dedendo, ou altura de raiz, é mostrada na Figura 5 como sendo a
distância radial entre a circunferência primitiva e a circunferência de dedendo, ou
raiz. Nesta região encontra-se o perfil lateral do flanco do dente.
Figura 5 - Alturas de adendo e dedendo.

25
As distâncias definidas ao adendo e ao dedendo para dentes
intercambiáveis são, geralmente, e , respectivamente.
(3-04)
(3-05)
Onde:
- Altura de adendo, mm
- Altura de dedendo, mm
Assim, conclui-se que a altura total do dentes é igual a somatória das
altura de adendo e dedendo.
(3-06)
Onde:
- Altura total do dente, mm
3.4. Círculo de Folga
O círculo de folga é a circunferência que tangencia o círculo de adendo da
engrenagem par. A folga é o quanto o dedendo, em certa engrenagem, excede ao
adendo da sua engrenagem par. O recuo é o quanto a largura do espaço entre os
dentes excede à espessura dos dentes engrenados, medido sobre os círculos
primitivos.
3.5. Vão entre os Dentes e Folga no Vão
O vão entre os dentes é a distância curvilínea, medida sobre a circunferência
primitiva, entre dois flancos defrontantes de dentes adjacentes. Para compensar
26
erros e imprecisões no vão e forma dos dentes, e permitir que os dentes de um par
de engrenagens rolem com a menor interferência possível existe uma folga,
chamada de folga no vão. Esta folga é a diferença entre o vão dos dentes de uma
engrenagem e a espessura do dentes da engrenagem conjugada. Quando existe tal
folga entre engrenagens, uma pode girar em um ângulo bem pequeno enquanto a
sua conjugada mantém-se estacionária. Outra função desta folga é promover a
lubrificação entre os dentes e a dilatação dos dentes quando ocorre aumento de
temperatura.

27
4. TEORIA DO DENTE DE ENGRENAGEM
4.1. Lei Fundamental do Engrenamento
A lei fundamental do engrenamento determina as velocidades angulares de
um par de engrenagens têm uma relação constante, uma vez, que os dentes
promovem movimento sem escorregamento. Desta forma, um par de engrenagens
engrazadas rolam seus círculos primitivos, em um ponto comum e tangente, uns
sobre os outros, de modo que sua velocidade tangencial Vt e forças tangenciais Ft
sejam idênticas, conforme mostra a Figura 6.
Figura 6 - Velocidade tangencial Vt e força tangencial Ft de um par de engrenagens.
Uma condição para que a lei fundamental do engrenamento ser verdadeira é
que o perfil do dente das duas engrenagens deve ser conjugado ao outro. Uma
maneira de conjugar as engrenagens é usando o chamado evolvental para lhes dar
forma.
4.2. Relação de Transmissão
A relação de transmissão, ou razão de velocidade, é a velocidade angular da
engrenagem motora dividida pela velocidade angular da engrenagem comandada.
Para engrenagens de dentes retos esta razão varia diretamente com os diâmetros
primitivos e com o número de dentes.
28
(4-01)
Onde:
- Relação de transmissão
Os índices e referem-se às engrenagens, motora e movida.
4.3. Velocidade no Círculo Primitivo
Quando engrenagens engrazadas estão em movimento, seus círculos
primitivos rolam uns sobre os outros, sem escorregamento. Se considerados os raios
primitivos como e e as velocidades angulares e , respectivamente, a
velocidade no circulo primitivo será .
(4-02)
Onde:
- Velocidade no circulo primitivo, mm.s-1
- Raio do circulo primitivo, mm
- Velocidade angular, rad.s-1
Desta forma a relação entre os raios primitivos e as velocidades angulares é
inversamente proporcional. Assim, a razão de velocidades é igual à razão do raio
de referência (primitivo) , da engrenagem de entrada, para o raio da engrenagem
de saída .
(4-03)
Onde:
- Razão de velocidades

29
4.4. Razão de Torque Transmitido
A razão de torque transmitido , ou ganho mecânico, é recíproco a razão
das velocidades e se relaciona com a velocidade angular da seguinte forma.
(4-04)
Onde:
- Razão de torque transmitido
Assim, um engrenamento é essencialmente um dispositivo de troca de
torque por velocidade e vice-versa. Uma utilização comum de engrenamento é
reduzir velocidade e aumentar o toque para grandes carregamentos, como em caixa
de marchas em automóveis. Outra aplicação requer um aumento na velocidade e
uma conseqüente redução no torque. Nos dois casos é geralmente desejável manter
uma razão constante entre as engrenagens enquanto elas giram.
4.5. Fator e Razão de Engrenamento
O fator de engrenamento de um dente individual considera a conversão da
pressão nos flancos no ponto de tangência entre os círculos primitivos para a
pressão nos flancos no ponto de engrenamento.
A razão de engrenamento é compreendida como a razão de velocidades
ou de torques, qualquer deles que seja ≥ 1. Portanto, a razão de engrenamento é
diretamente relacionada com a razão às relações de um par de engrenagens, como
por exemplo, a razão entre os diâmetros primitivos, da engrenagem movida e da
motriz , ou a razão entre os números de dentes, e , da engrenagem movida
e da motriz, respectivamente.

30
(4-05)
Onde:
- Razão de engrenamento
Para que a lei fundamental do engrenamento seja consistente, os contornos
dos dentes engrenantes devem ser conjugados um ao outro. Infinitas são as
variações de curvas destes perfis engrenantes, porém poucas são as curvas com
aplicação prática. Alguns relógios de pulso e parede ainda utilizam a ciclóides, já a
grande maioria das engrenagens utiliza a involuta, ou evolvente, de um círculo,
como curva do perfil de seus dentes.
4.6. Ação Conjugada e Perfil Evolvente
É, obviamente, irrealista supor que os dentes sejam perfeitamente formados,
suaves e rígidos, pois a aplicação de forças causará deflexões. Os dentes
engrazados têm suas superfícies em contato, rolante, similares à cames. Quando
perfis de dentes, ou cames, são projetados para que seu engrenamento tenha uma
razão de velocidade angular constante, defini-se que então estes elementos tenham
ação conjugada. Em tese qualquer perfil de dente tem um perfil engajante que
resulte em ação conjugada.
A Figura 7 mostra um par de came, que se assemelha a um par de
engrenagens, quando as superfícies em contato têm perfis de evolvente, a ação
conjugada resultante produz uma razão constate de velocidade angular. Para
transmitir movimento a uma razão de velocidade angular constante, o ponto primitivo
deve permanecer fixo, isto é, toda linhas de ação, para cada ponto instantâneo de
contato, devem passar pelo mesmo ponto P.

31
Figura 7 - Came A e seguidor B em contato.
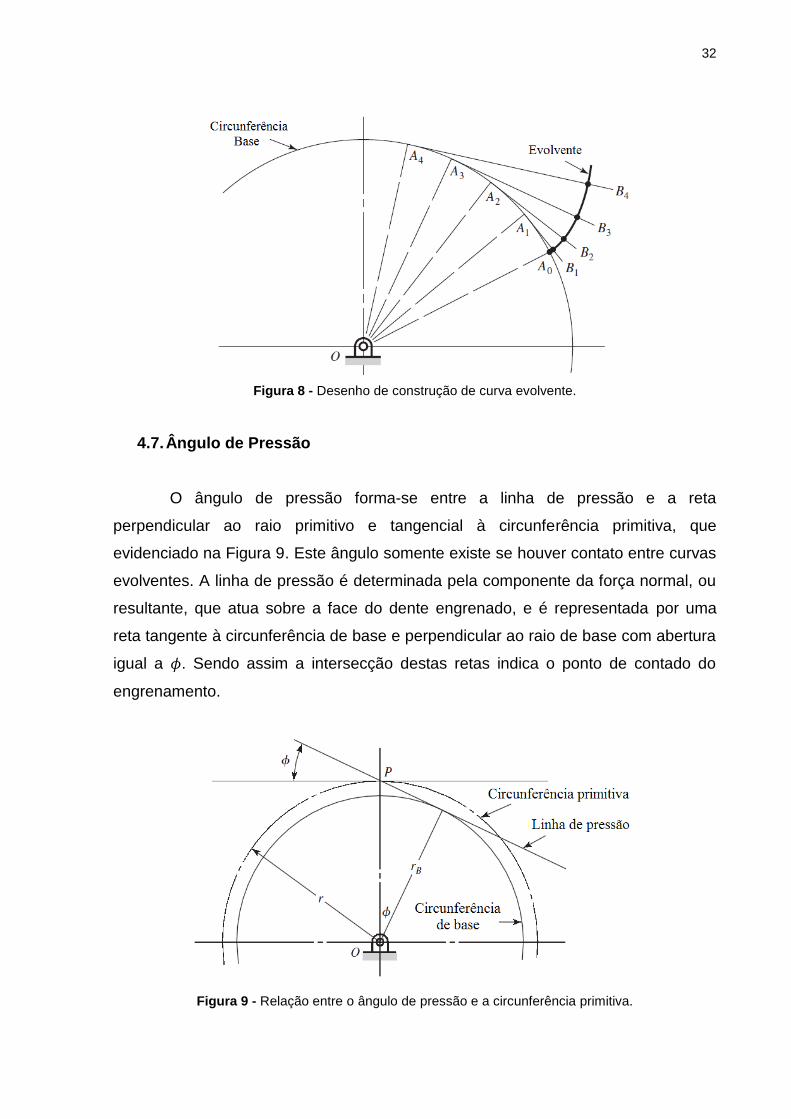
Os perfis habitualmente utilizados em dentes de engrenamento são
evolventes de uma circunferência. Esta curva evolvente, ou involuta, é descrita por
pontos de uma reta tangente (geratriz) que se enrola em um circulo, localizado na
circunferência de base, onde se formam os dentes. A Figura 8 mostra a construção
de uma curva evolvente, onde o circulo base é dividido em partes iguais por linhas
radiais AO, e perpendiculares a estas, retas AB de comprimentos iguais ao arco de
sua seção. A geratriz ao se enrolar forma uma curva de raio variável e perpendicular
ao raio de base, pois sua origem desloca-se sobre a circunferência.
Os termos evoluta e evolvente são relacionados. Evoluta, do latim
evolutus, é a curva que corresponde ao local geométrico de uma outra
curva; o envelope das perpendiculares da involuta. Involuta, ou evolvente,
do latim involutus, é, por sua vez, o local geométrico dos centros de
curvatura de uma curva plana ou inversa; curva cujas tangentes são
normais a uma outra; curva que se faz sobre a superfície tangente de uma
outra e que intercepta, ortogonalmente, as retas geradas (SHIGLEY, 2005,
p.631).
O perfil evolvente de um dente de engrenagem têm com finalidade diminuir a
zona de interferência, reduzindo-a à uma linha de contato. Entretanto, esta linha de
contato entre os dentes só existe hipoteticamente, pois com a aplicação de força
haverá deflexão entre os flancos, gerando uma área de contato.
32
Figura 8 - Desenho de construção de curva evolvente.
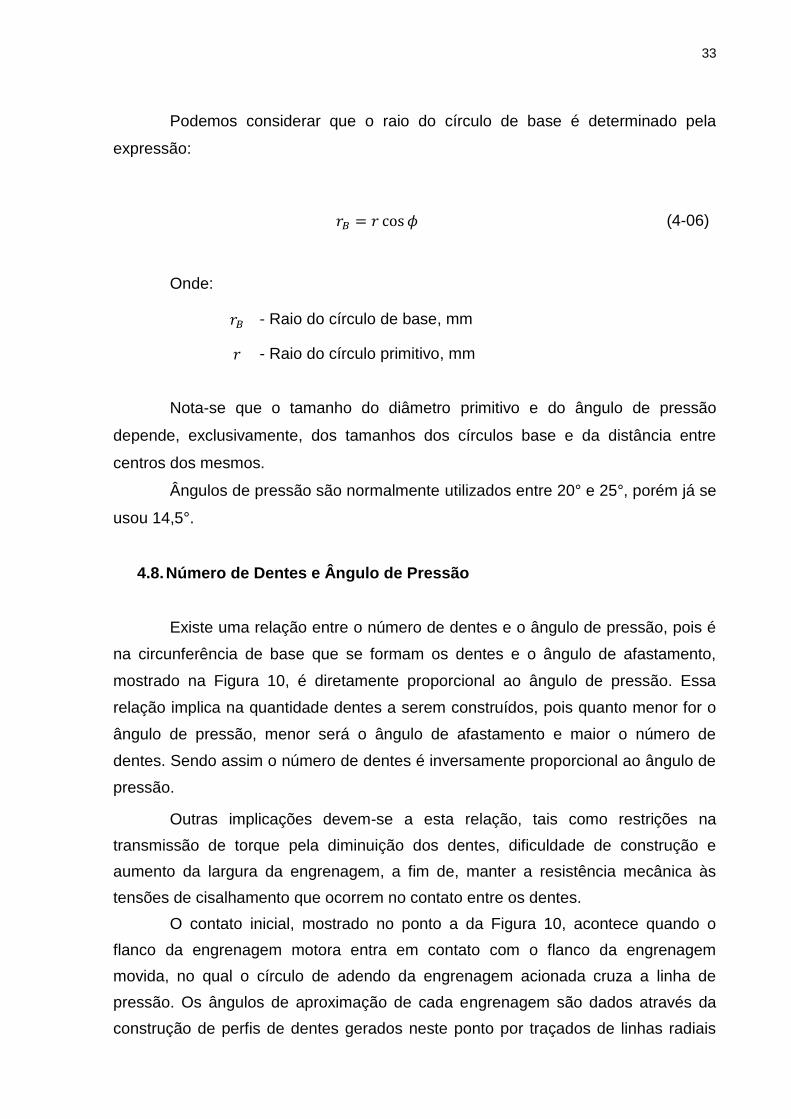
4.7. Ângulo de Pressão
O ângulo de pressão forma-se entre a linha de pressão e a reta
perpendicular ao raio primitivo e tangencial à circunferência primitiva, que
evidenciado na Figura 9. Este ângulo somente existe se houver contato entre curvas
evolventes. A linha de pressão é determinada pela componente da força normal, ou
resultante, que atua sobre a face do dente engrenado, e é representada por uma
reta tangente à circunferência de base e perpendicular ao raio de base com abertura
igual a . Sendo assim a intersecção destas retas indica o ponto de contado do
engrenamento.
Figura 9 - Relação entre o ângulo de pressão e a circunferência primitiva.
33
Podemos considerar que o raio do círculo de base é determinado pela
expressão:
(4-06)
Onde:
- Raio do círculo de base, mm
- Raio do círculo primitivo, mm
Nota-se que o tamanho do diâmetro primitivo e do ângulo de pressão
depende, exclusivamente, dos tamanhos dos círculos base e da distância entre
centros dos mesmos.
Ângulos de pressão são normalmente utilizados entre 20° e 25°, porém já se
usou 14,5°.
4.8. Número de Dentes e Ângulo de Pressão
Existe uma relação entre o número de dentes e o ângulo de pressão, pois é
na circunferência de base que se formam os dentes e o ângulo de afastamento,
mostrado na Figura 10, é diretamente proporcional ao ângulo de pressão. Essa
relação implica na quantidade dentes a serem construídos, pois quanto menor for o
ângulo de pressão, menor será o ângulo de afastamento e maior o número de
dentes. Sendo assim o número de dentes é inversamente proporcional ao ângulo de
pressão.
Outras implicações devem-se a esta relação, tais como restrições na
transmissão de torque pela diminuição dos dentes, dificuldade de construção e
aumento da largura da engrenagem, a fim de, manter a resistência mecânica às
tensões de cisalhamento que ocorrem no contato entre os dentes.
O contato inicial, mostrado no ponto a da Figura 10, acontece quando o
flanco da engrenagem motora entra em contato com o flanco da engrenagem
movida, no qual o círculo de adendo da engrenagem acionada cruza a linha de
pressão. Os ângulos de aproximação de cada engrenagem são dados através da
construção de perfis de dentes gerados neste ponto por traçados de linhas radiais

34
desde a intersecção desses perfis com os círculos primitivos até o centro das
engrenagens.
Figura 10 - Representação dos ângulos de afastamento e aproximação na interação entre dentes.
O menor número de dentes de um pinhão e uma coroa, cilíndricos de dentes
retos, com razão de engrenamento 1:1, que pode existir sem interferência é .
(4-07)
Onde:
- Número mínimo de dentes
- Ângulo de pressão, °

35
Se os dentes forem considerados completos, então 1, e caso sejam
reduzidos, 8. Para engrenagens padrão o ângulo de pressão é 20°, desta forma
conclui-se:
Deste modo, 13 dentes em ambas as engrenagens não causariam
interferência no engrenamento. Observa-se que para um ângulo de pressão de
14,5°, o número mínimo de dentes seria de 23, o que mostra o desuso das
configurações com este ângulo de pressão.
4.9. Interferência em Dentes Evolventes
A interferência em dentes de engrenagens, conforme é mostrado na Figura
11, ocorre nos pontos de tangência da linha de ação e dos círculos de base. Isso
ocorre quando o dente da engrenagem é grande o suficiente para penetrar na linha
de base do pinhão, penetrando sua cabeça no flanco do dente do pinhão, em uma
rotação forçada.
Figura 11 – Interferência na ação de dentes de engrenagens.
36
O alcance promovido pelo perfil evolvente faz com que o dente da
engrenamento motor (motriz) tenha um efeito de cavar, ou interferir, no flanco do
dente movido. Este fato é uma desvantagem séria das engrenagens evolventais,
sendo máxima quando um pinhão de pequeno número de dentes se engrena à uma
cremalheira. A interferência é reduzida com a diminuição de tamanho da
engrenagem.
Quando dentes de engrenagens, com perfis evolventes, são confeccionados
por ferramentas cremalheiras, seus flancos são recortados automaticamente, sendo
removida a parte que ocasiona a interferência entre quaisquer engrenagens. Porém,
o dente torna-se fraco e o grau de engrenamento pode vir a ser indesejável, mesmo
tendo resolvido o problema da interferência. Indica-se assim, evitar a condição de
interferência teórica, se possível.
4.10. Comprimento de Ação
A razão entre os raio das engrenagens permanece constante a medida que
os dentes entram e saem do engrenamento. Assim, pode-se expressar
cinematicamente a lei fundamental do engrenamento, conforme Robert L. Norton
descreve:
A normal comum do perfil de dentes, em todo os pontos de
contato durante o engrenamento, deve sempre passar por um ponto fixo na
linha de centro das engrenagens, chamado ponto de referência (NORTON,
2000, p 601).
O engrenamento é definido pelos pontos de contato de entrada e saída, e a
distância entre esses pontos ao longo da linha de ação, dentro do engrenamento, é
chamada de comprimento de ação. Esta distância é determinada pelas intersecções
dos respectivos círculos de adendo com a linha de ação. A distância ao longo da
circunferência de referência do engrenamento é o arco de ação, e este deve ter o
mesmo comprimento no pinhão e na engrenagem, a fim de, evitar o escorregamento
entre os cilindros teóricos em rotação.
O comprimento de ação pode ser calculado através da geometria da
engrenagem e do pinhão.

37
(4-08)
Onde:
- Comprimento de ação, mm
- Distância entre centros, mm
A distância entre centros é a soma dos raios primitivos do par de
engrenagens, ou seja.
(4-09)
4.11. Passo de Base
O passo de base é a distância, constante, entre os lados paralelos dos
dentes engrenados, ao longo de uma normal comum. A Figura 12 mostra esta
distância representada pela reta de até , que está relacionada ao passo circular,
representado na imagem como a reta entre e , pela seguinte equação.
(4-10)
Onde:
- Passo de base, mm por dentes
4.12. Razão de Contato
Um dente ao iniciar seu contato com o dente da outra engrenagem e
mantém este contato até o afastamento, a engrenagem descreve um arco, que é
definido como arco de ação. Entretanto, antes que este arco seja completado para
um determinado dente, outro dente inicia seu contato. Em outras palavras, existe em

38
todo engrenamento um curto espaço de tempo em que dois dentes estão acoplados
ou em contato ao mesmo tempo, um preste a concluir e outro iniciando. Esta relação
do número de dentes em contato ao mesmo tempo é definida como razão de
condução ou de contato, dado pela relação:
(4-11)
Onde:
- Razão de contato
Simplificadamente, se substituídas as equação 4.08 e 4.10, obtêm-se.
(4-12)
A razão de contato deve ser obrigatoriamente maior do que 1, evitando
choques e ruídos nos acoplamentos sucessivos dos dentes, pelo fato de um dente
desacoplar o outro já estar em contato. A Figura 12 mostra a razão de contato
geometricamente.
Figura 12 - Razão de contato.
39
5. RELAÇÃO ENTRE PERFIL E LARGURA DA FACE DO DENTE
O perfil do dente de engrenamento é definido através da analise da
transmissão do movimento sincronizado de rotação. Esta análise não esta
relacionada à causa do movimento e sim a cinemática do mesmo, que estuda a
adequação geométrica dos dentes engranzados para realizar movimento com
interferência pontual entre si, visto pelo plano do perfil. Este ponto de contato esta
localizado na tangência comum entre as circunferências primitivas. Neste caso a
largura da face do dente é indefinida e o movimento é transmitido ao longo de uma
linha de contato, porém se a área tender a zero e sua força será nula, logo a tensão
tenderá ao infinito, havendo uma imponderabilidade.
Em teoria a interferência é infinitesimal, porém na prática, esta interferência
tem uma área de contato. Devido a fatores como os esforços entre os dentes e as
características plásticas e elásticas dos materiais, ocorrem deflexões em seus perfis.
Este fato gera uma área de contato para transmissão de força.
A largura é definida variando a área de contato conforme a necessidade de
transmissão de força. Portanto, a analise é dinâmica, pois a carga aplicada é a
causa e o movimento é o efeito.
O perfil do dente tem relação com a largura da face do dente através do
módulo da engrenagem, visto que variações de perfis, como, altura e afastamento,
influenciam no módulo. Estas variações proporcionam alterações da largura da face,
visando manter a mesma área de transmissão de força. Padrões foram criados para
os diferentes tipos de engrenagens, não havendo assim, uma equação universal que
defina essa largura.
Toda via uma boa aproximação, mesmo que seja bem generalizada,
costuma-se indicar que a largura da face do dente não seja menor do que ¼, e nem
maior que ¾, do diâmetro primitivo da menor engrenagem.

40
6. POTÊNCIA TRANSMITIDA
Se feita uma análise das forças atuantes mostradas na Figura 13, é correto
afirmar que são três as principais forças aplicadas quando um par de engrenagens
está engrazado. Essas forças estão descritas como , e e são respectivas as
forças ortogonais, tangencial, radial e axial, nesta seqüencia. Nota-se que em caso
do engrenamento tratar-se de um par de engrenagens cilíndricas de dentes retos as
forças atuantes no flanco do dente, na altura da circunferência primitiva, são as
forças, tangencial e radial, impostas pelo dente da engrenagem vizinha. E neste
caso, a força axial é imposta pelo eixo sobre a engrenagem. Porém, quando os
dentes não são retos e nem paralelos ao eixo; ou seja, outros pares de engrenagens
que não sejam cilíndricas de dentes retos, esta força axial poderá ser exercida no
dente, também. No entanto a transferência de força se dá pela resultante , sendo
ela responsável pela pressão exercida na área do flanco do dente, ao cabo que,
encontra-se inclinada no ângulo de pressão .
Figura 13 – Diagrama de corpo livre para forças atuantes no engrenamento.
No diagrama de corpo livre mostrado na Figura 13 a força radial está
direcionada ao centro da circunferência primitiva e é a componente da resultante
, essencial na análise dos esforços ocorridos, radialmente, no eixo da engrenagem,
não tendo propósito algum na transmissão e sim somente tende a separar as
árvores. Já a componente tangencial é a real força responsável pela transmissão
41
entre engrenagens. Esta componente é descrita como o cateto adjacente à
resultante , em função do ângulo de pressão .
(6-01)
Onde:
- Força resultante, N
- Força tangencial, N
Assim, a carga transmitida é igual a força tangencial e da mesma forma,
a carga resultante transmitida é deduzida pela substituição na Equação (6-01).
(6-02)
Onde:
- Força resultante transmitida, N
- Força tangencial transmitida, N
Com essas considerações sobre as cargas transmitidas, calcula-se que o
torque transmitido é aplicado em função da carga tangencial transmitida e o
diâmetro primitivo . Isso por que o braço de alavanca é o raio primitivo , uma vez
que, .
(6-03)
Onde:
- Torque transmitido, Nm

42
A potência transmitida é obtida quando o torque transmitido e a velocidade
angular da engrenagem são multiplicados.
(6-04)
Onde:
- Potência transmitida, W
Outra análise é bastante usual é considerar a potência transmitida função da
carga tangencial transmitida multiplicada à velocidade no círculo primitivo , visto
que, . Se utilizada a Equação (6-03) para a definição do torque transmitido e
o substituirmos na Equação (6-04), multiplicando-o pela definição da velocidade no
circulo primitivo obtida na Equação (4-02) teremos:
(6-05)
Uma simplificação prática para projeto é considerar , portanto a
Equação (6-06) é relacionada com o diâmetro primitivo e as revoluções por minuto
da engrenagem.
(6-06)
Onde:
- Revoluções, rpm
43
7. TREM DE ENGRENAGENS
Uma compilação de duas ou mais engrenagens acopladas constitui um trem
de engrenagens. De modo que, um par de engrenagens é a configuração mais
simples de um trem de engrenagem. O empacotamento de um par de engrenagens
é limitado, usualmente, em razões acima de 10:1, pois o par de engrenagens, nestas
situações, torna-se excessivamente grande, caso mantido o número mínimo de
dentes especificado na Equação (4-07).
Trens de engrenagens podem ser simples, compostos ou epicíclicos6.
Uma análise cinemática referente à relação de revoluções (velocidade de
rotação) de um pinhão 2 movendo uma coroa 3, em um trem de engrenagens
simples, é descrita como função de seus números de dentes, ou, diâmetros
primitivos.
(7-01)
Esta equação aplica-se à qualquer tipo de par de engrenagens, sejam elas
cilíndricas de dentes retos, helicoidais, cônicas ou par sem-fim.
Quando se trata de trem de engrenagens com maior número de elementos,
do que um par, a relação de revoluções é função do produto de suas razões de
engrenamento, ou seja, cada relação entre os números de dentes, dos pares
conjugados que compõe o conjunto se multiplicam à revolução da engrenagem
motriz, para definir a revolução da engrenagem conduzida.
O trem de engrenagens ilustrado na Figura 14 é composto por cinco
engrenagens. A velocidade da engrenagem 6 é definida conforme foi explanado no
parágrafo anterior.
(a)
6 Epicíclicos (Epicíclico), movimento em pequenos círculos descritos por um astro em torno de um
ponto imaginário que, por sua vez, descreve outro círculo.

44
Figura 14 – Trem de engrenagens.
Nota-se que neste trem de engrenagens descrito na Figura 14 as
engrenagens motrizes são as 2, 3 e 5, enquanto as movidas são as demais, 4 e 6.
Porém a engrenagem 3 também é considerada movida, ao passo que, ela é
intermediária e seu número de dentes se cancela na Equação (a), afetando
exclusivamente a direção de rotação da engrenagem 6. Desta forma a relação de
transmissão de trem de engrenagens é definida como:
(7-02)
Os diâmetros primitivos também podem ser utilizados na Equação (6-02).
Outra observação é que resulta em um número positivo quando a última
engrenagem tiver o mesmo sentido de giro que a primeira, e será negativo, quando
o sentido de giro da última for oposto ao da primeira.
A equação universal para esta relação é simplificada da seguinte forma:
(7-03)
Onde os índices e correspondem as engrenagens, primeira e última,
respectivamente.
Em trens de engrenagens planetárias, ou epicicloidais, os efeitos obtidos são
incomuns, pois têm dois graus de liberdade; isto é, para um movimento restringido,
um trem planetário deve dispor de duas entradas. Estes trens sempre são
45
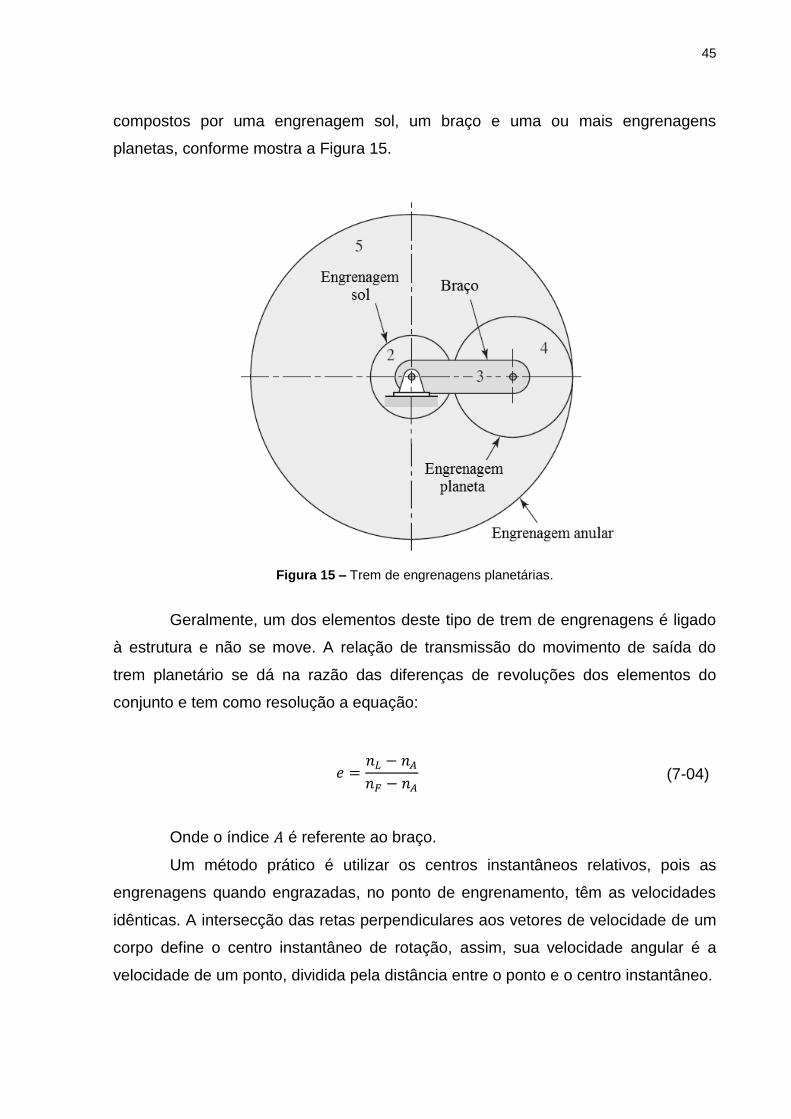
compostos por uma engrenagem sol, um braço e uma ou mais engrenagens
planetas, conforme mostra a Figura 15.
Figura 15 – Trem de engrenagens planetárias.
Geralmente, um dos elementos deste tipo de trem de engrenagens é ligado
à estrutura e não se move. A relação de transmissão do movimento de saída do
trem planetário se dá na razão das diferenças de revoluções dos elementos do
conjunto e tem como resolução a equação:
(7-04)
Onde o índice é referente ao braço.
Um método prático é utilizar os centros instantâneos relativos, pois as
engrenagens quando engrazadas, no ponto de engrenamento, têm as velocidades
idênticas. A intersecção das retas perpendiculares aos vetores de velocidade de um
corpo define o centro instantâneo de rotação, assim, sua velocidade angular é a
velocidade de um ponto, dividida pela distância entre o ponto e o centro instantâneo.

46
8. ENGRENAGENS CÔNICAS
As engrenagens cônicas são engrenagens com dentes formados em
superfícies cônicas e, geralmente, usadas em transmissões entre eixos
interceptantes. A Figura 16 ilustra um par de engrenagens cônicas de dentes retos.
As engrenagens cônicas são usadas para conectar os machados
que são cortados, geralmente perpendiculares, embora não
necessariamente. Os dentes de uma engrenagem cônica estão sob quase a
mesma ação que aqueles das engrenagens retas e helicoidais (FAIRES,
1982, p.533).
Figura 16 – Par de engrenagens cônicas de dentes retos.
8.1. Conceito
Engrenagens cônicas são cortadas em cones acoplados com eixos não-
paralelos e interceptantes em seus vértices de cones. O ângulo entre seus eixos
pode variar, porém normalmente é 90°. Quando os dentes são cortados paralelos ao
eixo de rotação, são chamadas de engrenagens cônicas de dentes retos. Outra
configuração, onde os dentes formam arcos circulares, são chamadas de
engrenagens cônicas espiraladas. Existe também outra configuração, chamada

47
ZEROL®, esta é patenteada, seus dentes são curvados como as cônicas espirais,
mas com um ângulo espiral zero, semelhante as cônicas de dentes retos. As
hiperbolóides, ou hipóides, são semelhantes as cônicas espiraladas, mas com eixos
deslocados e não interceptantes.
As engrenagens cônicas podem ser classificadas como:
Engrenagens cônicas de dentes retos
Engrenagens cônicas espirais
Engrenagens cônicas zerol
Engrenagens hiperbolóides (ou, abreviadamente, hipóides)
Engrenagens espiróides
Engrenagens cônicas de dentes retos são utilizadas geralmente para
velocidades no circulo primitivo de até 5m/s, quando o nível de ruído não é
importante. Disponíveis em muitos tamanhos comerciais, elas apresentam um custo
de produção menor que o de outras engrenagens cônicas, principalmente quando
fabricadas em pequenas quantidades. A Figura 17 ilustra um par de engrenagens
cônicas de dentes retos.
Figura 17 - Engrenagem cônica de dentes retos.

48
Engrenagens cônicas espirais são recomendadas para maiores velocidades
e para onde os níveis de ruídos forem importantes. As engrenagens cônicas espirais
são a contraparte cônica das engrenagens helicoidais. A Figura 18 mostra um par de
engrenagens cônicas espirais engrenadas.
Figura 18 - Engrenagens cônicas espirais
A definição do ângulo espiral, por sua vez, é mostrada na Figura 19.
Figura 19 - Corte de dentes de engrenagens cônicas espirais sobre a cremalheira de topo básica.

49
Engrenagens cônicas ZEROL® são um tipo de engrenagem patenteada com
dentes curvos, mas com ângulo de espiral nulo. Os esforços axiais neste tipo de
engrenagem não são tão altos quanto aqueles das engrenagens cônicas espirais.
Conseqüentemente, aplicam-se no lugar das engrenagens cônicas de dentes retos.
A engrenagem zerol é produzida pela mesma ferramenta utilizada para gerar a
engrenagem cônica de espiral comum.
Para fins de projeto, geralmente, usa-se o mesmo procedimento indicado
para engrenagens cônicas de dentes retos, substituindo, ao final, a engrenagem por
uma zerol. Um par de engrenagens cônicas zerol é ilustrado pela Figura 20.
Figura 20 - Engrenagens cônicas zerol.
Engrenagens hiperbolóides são normalmente utilizadas no caso de
aplicações envolvendo de engrenagens cônicas, mas com eixos deslocados,
inversos, como em diferenciais automotivos. Tais engrenagens são conhecidas
como hiperbolóides, pois suas superfícies primitivas são hiperbolóides de revolução.
A interação entre os dentes destas engrenagens consiste em uma combinação de
rolamento com deslizamento ao longo de uma linha reta, sendo semelhante ao que
ocorre nas engrenagens sem-fim. A Figura 21 mostra um par de engrenagens
hiperbolóides engrazada.

50
Figura 21 - Engrenagens hiperbolóides.
Engrenagens espiróides são semelhantes às hipóides, porém com
deslocamentos maiores, o pinhão começa a parecer com um parafuso sem-fim em
cone.
A Figura 22 é, por sua vez, incluída para auxiliar na classificação de
engrenagens cônicas em espiral.
Figura 22 - Comparação de engrenagens entre eixos interceptantes e inversos do tipo cônico.

51
8.2. Relações Geométricas
Em transmissões de movimento entre eixos que se interceptam, são usadas
engrenagens cônicas. Usualmente estas engrenagens são construídas para um
ângulo entre eixos de 90°, mas podem transmitir movimento entre diversos ângulos.
Apesar de seus dentes poderem ser fresados, gerados ou fundidos, somente os
gerados são definidos como precisos. Na Figura 23 mostra a terminologia das
engrenagens cônicas de dentes retos.
Figura 23 - Terminologia de engrenagens cônicas de dentes retos.
Os passos, diametral e circular, dessas engrenagens são calculados
igualmente aos passos das engrenagens cilíndricas de dentes retos, sendo medidos
na extremidade maior do dente. Os ângulos primitivos de tais engrenagens são

52
relacionados ao número de dentes e definidos pelos cones primitivos da parte mais
elevada.
(8-01)
Onde:
- Ângulo primitivo de cone do pinhão (motriz), °
- Ângulo primitivo de cone da coroa (movida), °
A aproximação de Tredgold7 determina que os dentes, mostrados na Figura
23, quando projetados no cone traseiro, suas formas são idênticas às de
engrenagens cilíndricas de dentes retos com um raio igual a distância de cone
traseiro . O número de dentes desta engrenagem virtual, gerados pela projeção, é:
(8-02)
Onde:
- Número de dentes virtuais
- Raio do cone traseiro, mm
Um sistema de dentes é a padronização das relações envolvendo adendo,
dedendo, profundidade de trabalho, espessura de dente e ângulo de pressão. Esta
padronização tem como objetivo a permuta das engrenagens de qualquer
quantidade de dentes, mesmo não havendo alteração em ângulo de pressão e
passo. As engrenagens cônicas de dentes retos padronizados são geradas com um
ângulo de pressão de 20°, suas alturas de adendo e dedendo são distintas e seus
dentes têm altura completa, aumentando a razão de contato e evitando o
adelgamento. Isso faz com que seu pinhão torne-se mais resistente.
7 Thomas Tredgold (1788-1829), engenheiro inglês, nascido em Brandon (UK), entre suas obras
destacaram-se, seu tratado sobre a resistência de ligas de aço e outros metais (Practical Treatise on the Strength of Cast Iron and other Metals) e seu livro sobre máquina à vapor (The Steam Engine).

53
A tabela 1 lista as proporções padronizadas referentes à extremidade maior
de dentes de engrenagens cônicas de dentes retos, com um ângulo de pressão igual
a 20°.
Tabela 1 – Proporções de dimensões de dentes para engrenagens cônicas de dentes retos.
Item Fórmula
Profundidade de trabalho
Folga
Adendo da engrenagem
Razão de engrenamento
Razão equivalente de 90°
Largura da face
Número mínimo de dentes Pinhão 16 15 14 13
Coroa 16 17 20 30
Fonte: American Gear Manufacturers Association (AGMA).
Shigley determina, de grosso modo, que a largura da face do dente pode ser
prescrita para projeto como:
(8-03)
Onde:
- Largura da face do dente, mm
- Distância de cone, mm
A distância de cone pode ser analisada na Figura 23, e é fornecida por:
(8-04)

54
8.3. Análise de Força
Considerando que todas as cargas atuantes, na engrenagem e nos mancais,
estão concentradas em um ponto médio, trigonometricamente sua resultante é a
força . Esta força resultante esta realmente situada entre algum local entre o ponto
médio e a extremidade do dente, porém o erro é irrisório se desconsiderada esta
hipótese.
A carga resultante é composta por forças componentes: a força tangencial
, a força radial e a foca axial . A Figura 24 mostra a carga resultante e suas
componentes no ponto médio do dente de uma engrenagem cônica de dentes retos.
Figura 24 - Forças atuantes nos dentes de engrenagens cônicas de dentes retos.
A carga tangencial, ou transmitida, é defina em função do torque transmitido
e o raio primitivo no ponto médio do dente. Já as demais componentes são definidas
através de suas relações com a própria carga tangencial, de maneira que:

55
(8-05)
(8-06)
(8-07)
Onde:
- Raio primitivo no ponto médio do dente, mm
- Força tangencial transmitida, N
- Força radial transmitida, N
- Força axial transmitida, N
Os índices , e são referentes às componentes, tangencial, radial e axial,
respectivamente.
De acordo com configuração trigonométrica das forças indicada na Figura
24, as componentes são perpendiculares entre si, podendo assim, serem
empregadas na determinação dos esforços nos maçais, mediante os métodos de
estática.
8.4. Aplicação
Engrenagens cônicas são eficientes transmissores entre eixos interceptantes
e com ângulos variados. Engrenagens redutoras e diferenciais, como as usados em
automóveis, são exemplos de aplicações usuais deste tipo de engrenamento.
As engrenagens redutoras cônicas, operadores de engrenagens cônicas,
ilustrados na Figura 25, são mecanismos de transmissão de força entre eixos que se
cruzam (concorrentes). Este tipo de dispositivo é utilizados em motores, bombas ou
qualquer acionamento por movimento rotativo. Seu engrenamento é capaz de
transmitir força através das relações entre os diâmetros do pinhão e da coroa, de
forma que se multiplicar o torque de saída haverá uma redução de velocidade, da
mesma forma, se ampliada a velocidade será reduzido o torque.

56
Figura 25 - Operador de engrenagem cônica.
A engrenagem diferencial mostrada na Figura 26 é conhecida, sobretudo,
como transmissora aos eixos de rotação dos automóveis. A força do eixo motor é
transmitida à grande roda cônica esquerda. Esta está unida solidamente ao semi-
eixo esquerdo e à roda diferencial. Ao caminhar em linha reta para frente, o suporte
da roda do diferencial e o semi-eixo giram com o mesmo numero de revoluções ou
voltas e na mesma direção; as rodas do diferencial não interferem. Quando se trava
o semi-eixo direito, as rodas do diferencial giram sobre seus eixos e o suporte do
diferencial gira em sentido contrário ao semi-eixo esquerdo.
Figura 26 - Esquema de diferencial de engrenagens cônicas para automóveis.

57
8.5. Estudo de Caso
O estudo de caso a seguir configura um problema envolvendo o projeto de
um redutor monobloco, conforme mostra a Figura 27. O dispositivo proposto deve
ser movido por um motor elétrico conectado ao redutor, por flange, com um
engrenamento de redução de 5:1. Um trem simples de engrenagens cônicas, com
um ângulo entre suas árvores de 90°, é uma solução razoável para esta aplicação.
O desenvolvimento a seguir será apenas do trem de engrenagens.
Na Tabela 2 são listadas as considerações para resolução do problema.
Tabela 2 – Considerações para resolução do estudo de caso: redutor monobloco.
Problema: Determinar os ângulos primitivos de cone, os diâmetros primitivos, as
revoluções de saída e as forças atuantes no engrenamento, se utilizar 20° de
ângulo de pressão em um pinhão com 16 dentes e um passo diametral de
0,275mm-1 em uma razão de engrenamento de 5:1 e uma potência
transmitida de 3hp a 600rpm do motor.
Dados:
Unidades:
Figura 27 - Redutor de engrenagens cônicas.

58
8.5.1. Solução
1. Utilizando a Equação (4-05) calcula-se o número de dentes da coroa;
2. Utilizando a Equação (3-01) calculam-se os diâmetros primitivos;
3. Utilizando a Equação (7-03) calculam-se as revoluções de saída;
4. Utilizando a Equação (8-01) calculam-se os ângulos primitivos de cone;
Observação:
5. Utilizando a Equação (6-04) calculam-se o torque transmitido;
59
6. Utilizando a Equação (6-03) calculam-se a carga transmitida;
7. Utilizando a Equação (8-06) calculam-se as cargas radiais;
8. Utilizando a Equação (8-07) calculam-se as cargas axiais;
9. Utilizando a Equação (6-02) calcula-se a carga total transmitida.
8.5.2. Conclusão
O estudo realizado conclui que para o projeto de um redutor monobloco com
redução de 5:1 que transmitirá 3hp a 600rpm em um pinhão com 58,20mm de
diâmetro, 16 dentes e um ângulo de pressão de 20°, deverá ser considerada uma
força transmitida de 1301,88N.

60
9. ENGRENAGENS SEM-FIM
As engrenagens sem-fim, ou par de sem-fim, são engrenamentos entre
eixos não-paralelos, sem interseção, usualmente em ângulos retos entre eles. A
Figura 28 mostra um par sem-fim de envelope simples.
A engrenagem sem-fim se utiliza para transmitir as potências entre
eixos que se cruzam, quase sempre perpendiculares entre si. Em um
pequeno espaço se podem obter satisfatoriamente relações de velocidades
comparativamente altas, embora talvez perca em rendimento em
comparação com outros tipos de engrenagens. O contato de impacto de
engrenagens cilíndricas de dentes retos e de outros tipos não existe nas
engrenagens sem-fim. Em vez disso, os filetes deslizam em contato
permanente com os dentes da coroa, resultando em um funcionamento
silencioso se o desenho, a fabricação e o funcionamento são corretos
(FAIRES, 1982, p. 557).
Figura 28 - Engrenagem Sem-Fim
9.1. Conceito
O sem-fim é similar a uma rosca de parafuso, que se acopla com uma
engrenagem chamada engrenagem sem fim (coroa). O sem fim na verdade é uma
engrenagem helicoidal com ângulo de hélice muito grande que um único dente se

61
envolve continuamente ao redor de sua circunferência. O sem-fim e a coroa têm a
mesma mão de hélice, como em engrenagens helicoidais cruzadas, porém seus
ângulos de hélices costumam ser bem diferentes.
O sentido de rotação da coroa nestas engrenagens depende diretamente do
sentido de direção do parafuso sem-fim e posição de corte de seus dentes. Os
conjuntos desse tipo de engrenamento são conhecidos como envelopes, único e
duplo, e são fundamentalmente construídos para que seus dentes cubram
parcialmente uns aos outros.
Muitas engrenagens sem-fim têm uma propriedade interessante que
nenhuma outra engrenagem tem: o eixo gira a engrenagem facilmente, mas a
engrenagem não consegue girar o eixo. Isso se deve ao fato de que o ângulo do
eixo ser tão pequeno que quando a engrenagem tenta girá-lo, o atrito entre a
engrenagem e o eixo não deixa que ele saia do lugar. Essa característica é útil para
máquinas como transportadores, nos quais a função de travamento pode agir como
um freio para a esteira quando o motor não estiver funcionando. Outro uso muito
interessante para engrenagens sem-fim está no diferencial Torsen8, que é usado em
carros e caminhões de alto desempenho.
9.2. Relações Geométricas
Os dentes são de formas involutas e existem componentes grandes de
velocidade de escorregamento no engrenamento. O sem-fim e a coroa não são
intercambiáveis. As formas de dentes podem ser simples ou duplas, para aumentar
a área de contato entre os dentes.
Ângulos de pressão mais elevados dão maior resistência ao dente á custa
do atrito mais elevado, carga mais elevadas nos mancais e tensões de flexão mais
elevadas no sem fim. Para a aplicação de alta potencia a alta velocidade, uma
engrenagem sem-fim de passo relativamente fino deve ser usada. Altos torques e
baixas velocidades necessitam de passo áspero e diâmetros maiores da coroas.
8 Torsen (nome completo Torsen traction) é um tipo de diferencial de deslizamento limitado usado em
automóveis. Foi inventado pelo americano Vernon Gleasman e fabricado pela Corporação Gleason. Todos os diferenciais Torsen têm sua origem nos diferenciais Dual-Drive, que foi inventado e patenteado pela Gleasman em 1958.

62
O ângulo de hélice do parafuso é normalmente muito grande, enquanto o da
coroa é pequeno. Portanto, é normal especificar o ângulo de avanço no sem-fim e
o ângulo de hélice na coroa, que são idênticos quando o ângulo entre os eixo é
igual a 90°, assim um complementa o outro, conforme é ilustrado na Figura 29.
Nas engrenagens sem fim, o número de dentes e o diâmetro de referência
não têm uma relação única como nas engrenagens comuns, a decisão é feita em
relação aos números de entrada ou dentes desejados no sem fim, o número de
dentes na coroa é definido pela relação de engrenamento requerida.
O número de dentes não esta relacionado com o diâmetro de referência
como nas engrenagens comuns. O sem fim pode ter qualquer diâmetro desde que
seu passo axial seja o mesmo que o passo circular da coroa.
Resumindo o diâmetro do sem fim pode ser selecionado independente do
diâmetro da coroa que só variarão a distancia entre centros, mas não afetarão a
razão de engrenamento. O passo axial do sem fim é o mesmo que o passo
circular transversal da engrenagem e estão relacionados ao avanço pelo número
de dentes escolhidos, se o ângulo entre eixos for 90°. Assim, o diâmetro primitivo
da coroa pode ser medido no plano contendo o eixo do sem-fim, conforme a mostra
a Figura 29.
Figura 29 - Terminologia das engrenagens sem-fim.

63
A definição do diâmetro primitivo da coroa é dada pela seguinte equação,
onde é relacionado o número de dentes da coroa e o passo circular transversal com
a circunferência primitiva.
(9-01)
Onde:
- Passo circular transversal, dentes por mm
Como o diâmetro do parafuso independe do número de dentes, pode ele ter
qualquer tamanho. Contudo, esse diâmetro deve o mesmo que o passo da fresa
caracol empregada para cortar os dentes do par sem fim. Shigley[1] recomenda
selecionar este diâmetro de modo que esteja no seguinte intervalo.
(9-02)
O índice é referente ao parafuso sem-fim.
O avanço e o ângulo de avanço seguem a seguinte relação:
(9-03)
(9-04)
Onde:
- Avanço, mm
- Passo axial, mm por dentes
- Ângulo de avanço, °
O sistema de dentes em engrenagens sem-fim não é tão padronizado
quanto em outros tipos de engrenagens, o motivo para isso, talvez seja por não

64
haver necessidade. Os ângulos de pressão dependem dos ângulos de avanço e
devem ser suficientes em tamanho para evitar adelgamento dos dentes do parafuso
sem-fim no lado em que o contato termina. Para manter uma proporção adequada
entre a profundidade do dente e o ângulo de avanço, o ideal é obter uma proporção
entre a profundidade e o passo circular axial; ou seja, o ângulo de avanço é
proporcional ao passo circular axial, que é idêntico ao passo circular transversal.
Uma recomendação é feita por Shigley[1], vista na Tabela 3, que considera como boa
prática, no que diz respeito a ângulo de pressão e profundidade do dente.
Tabela 3 – Ângulo de pressão recomendados de dentes para engrenagens sem-fim.
Ângulo de avanço Ângulo de pressão Adendo Dedendo
0-15
15-30
30-35
35-40
40-45
14,5
20
25
25
30
0,3683px
0,3683px
0,2865px
0,2546px
0,2228px
0,3683px
0,3683px
0,3314px
0,2947px
0,2578px
Fonte: American Gear Manufacturers Association (AGMA).
Indica-se como largura de face , de um parafuso sem-fim, o comprimento
de uma reta tangente ao círculo primitivo do sem-fim, entre os pontos de intersecção
com o círculo de adendo, conforme é mostrado na Figura 30.
(9-05)
Figura 30 - Representação gráfica da largura da face de uma coroa sem-fim.
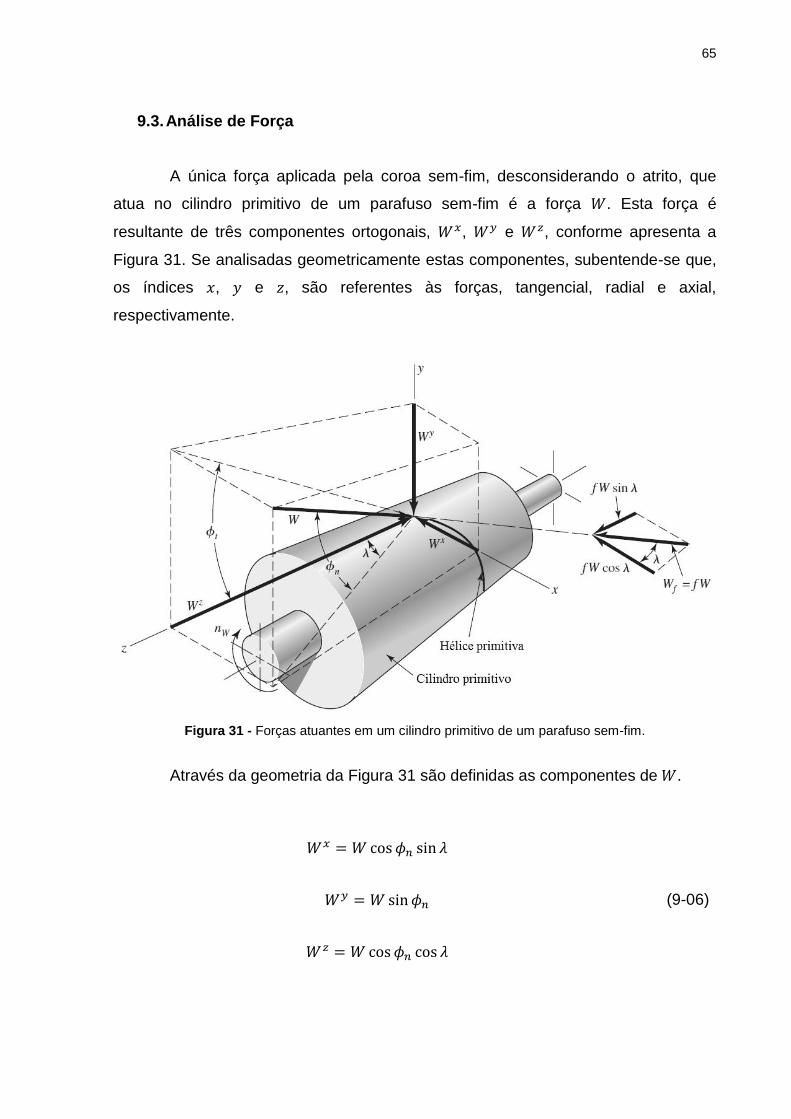
65
9.3. Análise de Força
A única força aplicada pela coroa sem-fim, desconsiderando o atrito, que
atua no cilindro primitivo de um parafuso sem-fim é a força . Esta força é
resultante de três componentes ortogonais, , e , conforme apresenta a
Figura 31. Se analisadas geometricamente estas componentes, subentende-se que,
os índices , e , são referentes às forças, tangencial, radial e axial,
respectivamente.
Figura 31 - Forças atuantes em um cilindro primitivo de um parafuso sem-fim.
Através da geometria da Figura 31 são definidas as componentes de .
(9-06)
66
O ângulo de pressão é geometricamente definido como sendo o ângulo
de inclinação de no plano formado pela diagonal resultante das componentes,
e , e perpendicular da componente , conforme indica a Figura 31.
Se consideradas as componentes de atuantes no parafuso sem-fim e
recíprocas à coroa, então são definidas como opostas. Desta forma, os subscritos
e são utilizados para indicar as forças, no parafuso sem-fim e na coroa,
respectivamente. Nesta análise o ângulo entre os eixos, do parafuso e da coroa, é
90°, pois são perpendiculares e não interceptantes, onde o eixo do parafuso é
paralelo à direção e o eixo da coroa é paralelo a direção . Portanto, a
componente , é tangencial no parafuso e axial na coroa, em contraparte a
componente , é axial no parafuso e tangencial na coroa.
(9-07)
Diferente do que ocorre nos demais engrenamentos, onde o movimento é de
rolamento puro, o movimento no engrenamento de um par sem-fim é de
deslizamento puro. Assim, o atrito é um fator importante no desempenho deste tipo
de engrenagem, de modo que, deve-se introduzir o coeficiente de atrito em um
novo conjunto de relações semelhante aquele visto nas Equações (9-06). Essa força
resultante da ação do atrito na força é demonstrada na Figura 31, como sendo,
e é composta pelas componentes , que é oposta ao sentido de
rotação do parafuso, e , que é oposta ao sentido de deslocamento da coroa.
(9-08)

67
Onde:
- Coeficiente de atrito
Ao cabo que, para se obter a resultante é inserida a componente
da terceira parte da Equação (9-07) no lugar de na Equação (9-08), e
multiplicado ambos os lados pelo coeficiente de atrito .
(9-09)
Se igualadas forem, a primeira parte da Equação (9-06) com a terceira parte
da Equação (9-08), retirando a resultante , o resultado será a relação entre a força
tangencial do parafuso sem-fim e a força tangencial da coroa .
(9-10)
Assim, a eficiência é definida como o quociente das forças tangenciais,
com e sem atrito, atuantes no parafuso sem-fim.
(9-11)
Onde:
- Eficiência
A Tabela 4 é uma recomendação de Shigley[1] a respeito da eficiência de
pares de engrenagens sem-fim. As eficiências listadas foram obtidas através da
Equação (9-10), utilizando ângulos de hélice entre 1° e 30° e um coeficiente de atrito
usual de 0,5. No entanto esta listagem de eficiências só é valida, uma vez que, o
ângulo entre os eixos do parafuso e da coroa seja 90°, pois o ângulo de hélice só
é idêntico ao ângulo de avanço nesta condição.

68
Tabela 4 – Eficiência de pares de engrenagens sem-fim para 0,5.
Ângulo de Hélice Eficiência
1,0
2,5
5,0
7,5
10,0
15,0
20,0
30,0
25,2
45,7
62,0
71,3
76,6
82,7
85,9
89,1
Fonte: Shigley, Joseph E. Projeto de Engenharia Mecânica, 2005, p. 665. Nota: A unidade dos ângulos de hélice é graus [°]. As eficiências são indicadas em percentual, %.
Conforme é mostrado na Tabela 4, a eficiência aumenta a medida que o
ângulo de hélice aumenta, isso é devido a maior liberdade de deslizamento entre os
dentes do parafuso sem-fim e da coroa. Portanto, as componentes tangenciais da
resultante são amplificadas e o atrito tem menor influência sobre o movimento.
Um fator importante para a análise do atrito, é que ele depende diretamente
da velocidade de deslizamento . Esta velocidade, em uma análise vetorial, resulta
da raiz quadrada da soma dos quadrados dos vetores das velocidades na linha
primitiva, sendo para a coroa e para o parafuso; ou seja, é definida como:
(9-12)
Onde:
- Velocidade de deslizamento, mm.s-1
- Velocidade do parafuso sem-fim na linha primitiva, mm.s-1
- Velocidade do coroa sem-fim na linha primitiva, mm.s-1

69
A Figura 32 define graficamente a Equação (9-11) mostrando as
componentes de velocidade em engrenamento de par sem-fim.
Figura 32 - Velocidade de deslizamento em engrenamento de par sem-fim.
O diagrama exposto na Figura 33 indica a tendência geral para coeficientes
de atrito em função da velocidade de deslizamento. Estes valores de coeficientes de
atrito são baseados em condições de lubrificação boas, segundo Shigley[1].
Figura 33 - Valores do coeficiente de atrito para engrenagens sem-fim.

70
A curva B é referente a materiais de alta qualidade, como bronze fosforoso.
Já a curva A é indicada à materiais maior rugosidade superficial, como no caso de
ferro fundido. Quaisquer outros materiais com acabamento de superfícies entre
estas, suas curva estarão entre A e B. A variação destes coeficientes pode chegar a
20%, devido as diferenças de acabamento.
9.4. Aplicação
O engrenamento sem-fim é utilizado em aplicações que necessitam criar
altas razões em um pacote compacto, propriedades de auto travamento, conexões
de eixos não paralelos sem interseção. A sua característica mais importante é que o
eixo gira a engrenagem facilmente, mas a engrenagem não consegue girar o eixo.
Uma aplicação é no diferencial de Torsen em automóveis, ilustrado na
Figura 34.
Figura 34 - Diferencial de Torsen.
O diferencial Torsen opera com base na combinação de uma série de
engrenagens convencionais e pares sem-fim. Especificamente, são utilizados três
pares de engrenagens sem-fim engrazados por dentes retos localizado nas
extremidades. A retenção ou o aumento de atrito ocorre porque o engrenamento
sem-fim funcionar como um mecanismo de parafuso, o ponto de contato entre os
dentes se movimenta em uma linha reta ao longo do próprio dente, que anexa o
movimento de rotação à um movimento de deslizamento da roda, atrvé de atrito. A

71
fixação ou o nível de resistência são determinados precisamente pelo ângulo da
hélice dessas rodas helicoidais.Se comparado a um diferencial convencional, em um
Torsen se substituem os satélites por três pares de engrenagens helicoidais,
engrenadas por pinhões de dentes retos em seus extremos. Os planetários deste
caso são parafusos sem-fim, com os quais engrena cada uma das engrenagens
helicoidais.
Outro exemplo bastante usual do engrenamento sem-fim são os limpadores
de pára-brisas, como mostra o detalhe da Figura 35.
Figura 35 - Esquema de limpador de para brisas.
Os limpadores combinam duas tecnologias mecânicas; uma combinação de
motor elétrico com engrenagem redutora sem-fim, que gera força, e um inteligente
sistema de transmissão por hastes, que converte a rotação de saída do motor no
movimento alternado dos limpadores. É necessária muita força para que as
palhetas se movimentem de forma rápida sobre o pára-brisa. Para gerar esse tipo de
força, uma engrenagem redutora sem-fim é usada na saída de um pequeno motor
elétrico. Esta engrenagem redutora pode multiplicar o torque do motor cerca de 50
vezes, enquanto diminui a velocidade de saída do motor elétrico na mesma
proporção. A saída da engrenagem redutora opera um sistema de acionamento por
hastes que movimenta os limpadores.
A Figura 36 apresenta o sistema de engrenamento de um hodômetro
mecânico, que outra aplicação de engrenagens sem-fim. Não são muito comuns
hoje, já que estão sendo substituídos por hodômetros computadorizados.

72
Figura 36 - Hodômetro mecânico.
Esse hodômetro utiliza uma série de três engrenagens sem-fim para atingir
1690:1 de redução. O eixo de entrada aciona o primeiro eixo de rosca, que aciona
uma engrenagem. Cada volta completa da rosca só vira um dente da engrenagem.
Essa engrenagem gira outra rosca, que gira outra engrenagem, que gira a última
rosca e finalmente a última engrenagem, acoplada a um indicador de 1 milha.
A utilização usual de engrenagens sem-fim é em redutores de velocidade,
chamados em inglês de wormsets gearbox, conforme ilustrado na Figura 37.
Figura 37 - Redutor de engrenagens sem-fim.

73
Os redutores de velocidade de engrenagens sem-fim, ou caixas redutoras
sem-fim, são excelentes transmissores de força quando se necessita de grandes
razões de velocidade ou torque, principalmente quando em espaços confinados.
9.5. Estudo de Caso
O estudo de caso a seguir configura um problema envolvendo o projeto de
um redutor de velocidades instalado em uma grua, conforme mostra a Figura 38. O
dispositivo proposto deve ser movido por um motor elétrico acoplado ao redutor, por
um eixo, com um engrenamento de redução de 50:1. Um par sem-fim, com um
ângulo entre suas árvores de 90°, é uma solução razoável para esta aplicação. O
desenvolvimento a seguir será apenas do par de engrenagens.
Na Tabela 5 são listadas as considerações para resolução do problema.
Tabela 5 – Considerações para resolução do estudo de caso: redutor de engrenagens sem-fim.
Problema: Determinar os avanço, o ângulo de avanço, o número de dentes da coroa, o
diâmetro primitivo da coroa sem-fim, as revoluções de saída e as forças
atuantes no engrenamento, se utilizar 20° de ângulo de pressão em um
pinhão de 50,80mm de diâmetro primitivo, com 1 entrada de rosca e um
passo circular axial de 0,01mm, em uma razão de engrenamento de 50:1 e
uma potência transmitida de 1hp a 1750pm do motor. Considerando um
coeficiente de atrito de 0,03, sugerido pelo diagrama da Figura 33.
Dados:
Unidades:

74
Figura 38 - Redutor de engrenagens cônicas.
9.5.1. Solução
10. Utilizando a Equação (9-03) calcula-se o avanço;
11. Utilizando a Equação (9-04) calcula-se o ângulo de avanço;
12. Utilizando a Equação (4-05) calcula-se o número de dentes da coroa;
13. Utilizando a Equação (9-01) calculam-se os diâmetros primitivos;
75
14. Utilizando a Tabela 3 calcula-se a altura de adendo para um ângulo de
pressão de 20°;
15. Utilizando a Equação (9-05) calcula-se a face do dente do parafuso;
16. Utilizando a Equação (7-03) calculam-se as revoluções de saída;
17. Utilizando a Equação (4-02) calculam-se as velocidades nas linhas
primitivas;
18. Utilizando a Equação (9-12) calcula-se a velocidade de deslizamento;
19. Utilizando a Equação (6-05) calcula-se o torque transmitido;
76
20. Utilizando a Equação (6-03) calcula-se o torque transmitido;
21. Utilizando a Equação (9-08) calcula-se a carga total sem atrito;
22. Utilizando a Equação (9-08) calculam-se as cargas com atrito;
23. Utilizando as relações da Equação (9-07) definem-se as cargas na coroa;
24. Utilizando a Equação (6-03) calcula-se o torque de saída;
77
25. Utilizando a Equação (9-11) calcula-se a eficiência do engrenamento;
9.5.2. Conclusão
O estudo realizado conclui que para o projeto de um redutor sem-fim com
redução de 50:1 que transmitirá 1hp a 1750rpm em um pinhão (parafuso sem-fim)
com 50,80mm de diâmetro, 1 dente e um ângulo de pressão de 20°, deverá ser
considerada um torque de saída de 57,52Nm, com eficiência de 32,04%.

78
CONCLUSÃO
Com este trabalho de pesquisa se pode concluir que engrenagens são
elementos mecânicos de transmissão bastante eficientes, visto que, podem
transmitir movimento rotativo entre eixos paralelos, perpendiculares ou com qualquer
outro ângulo, sendo eles interceptantes ou não. No caso das engrenagens cônicas,
por exemplo, são mecanismos capazes de transmitir torque e movimento rotativo
entre eixo interceptantes com qualquer ângulo entre si. Trens destas engrenagens
são poderosos multiplicadores ou redutores de velocidades e força, podendo eles
alternar o sentido deste movimento. Já as engrenagens sem-fim são mecanismos
capazes de transmitir movimento rotativo entre eixos não-paralelos e não-
interceptantes, este tipo de engrenagem é excelente transmissor para razões de
velocidade altas, quando utilizado em conjunto, pois seus envelopamentos, único ou
duplo, são compactos.
Muitas são as aplicações para estes dois tipos de engrenamento, como visto
nas aplicações. Engrenagens cônicas podem ser utilizadas com redutores de
velocidades quando os eixos se cruzam, como nos diferenciais de automóveis e
motoredutores, que são redutores acoplados à motores elétricos. Já as engrenagens
sem-fim; ou seja, aquelas constituídas de um par de engrenagens sem-fim, são
muito utilizadas como redutores de grandes razões de velocidades em pequenos
pacotes, como em guindastes, gruas e talhas. Este tipo de engrenagem tem outras
diversas aplicações, como visto em hodômetros mecânicos e sistemas alternadores
de movimento, como um para brisas e um tear mecânico.
No primeiro caso apresentado, ao final do capítulo sobre engrenagens
cônicas, em que foi analisado um redutor de velocidades, concluiu-se que para uma
redução de 5:1 utilizando um par de engrenagens cônicas com um ângulo de
pressão de 20° e 90° de ângulo entre suas árvores, acoplados em um motor de 3hp
com 600rpm, e um pinhão com 16 dentes e um passo diametral de 0,275mm-1, seu
diâmetro primitivo será de 58,20mm. A coroa deverá ter um diâmetro primitivo de
290,91mm com 80 dentes, tendo uma velocidade de 120rpm. Seus ângulos
primitivos de cone serão de 11,81° para o pinhão e 79,69° para a coroa. Com esta
configuração o dispositivo transmitirá uma força de 1301,88N.
79
No segundo caso apresentado, ao final do capítulo sobre engrenagens sem-
fim, foi analisado um redutor de velocidades. Neste caso o dispositivo é formado por
um par de engrenagens sem-fim para obter uma redução de 50:1. O ângulo de
pressão utilizado é de 20° em um pinhão, ou parafuso sem-fim, de 50,80mm de
diâmetro primitivo com 1 dente; isto é, o parafuso tem 1 entrada de rosca, com um
passo circular axial é de 0,01mm. O pinhão é acoplado à um motor de 1hp com
1750rpm. Para que o dispositivo efetue sua função, o avanço é de 6,35mm e o
ângulo de avanço é 2,28°. A coroa tem 50 dentes em um diâmetro primitivo de
102,68mm e sua velocidade é de 35rpm. A velocidade de deslizamento no
engrenamento é de 9,32m.s-1, transmitindo assim um torque de saída de 57,52Nm,
com eficiência de 32,04%, se considerado um coeficiente de atrito de 0,03, conforme
recomendado por Shigley, no diagrama da Figura 33.
Sugere-se um estudo mais profundo em caso de trens de engrenagens com
mais de dois elementos, visto que, são mais complexos em função do número de
componentes, principalmente se forem mistos e com grandes razões de
velocidades. Entretanto, para análises de problemas simples, o conteúdo exposto é
de grande utilidade, afinal está exposto de forma simplificada e contém um material
completo.
Todas as análises, desconsiderando o capítulo 5, o capítulo 6 e os
subcapítulos 7-3 e 8-3, foram puramente cinemáticas. Porém, as análises de forças,
vistas nos subcapítulos 7-3 e 8-3, são coerentes para o entendimento da
transmissão de torque entre engrenagens, assim como, a análise feita dos esforços
no dente, apresentada no capítulo 5, é necessária para a compreensão do
dimensionamento da largura de face do dente de engrenagens em geral. Entretanto,
fica claro que o estudo é de cunho cinemático e não dinâmico. Já o capítulo 6 é
imprescindível, pois grande parte das avaliações geométricas feitas para
dimensionamento de elementos, ou componentes, dos sistemas de engrenamentos
são vinculados às cargas aplicadas.
Desta forma a análise sobre as tensões e resistência em engrenagens
cônicas fica para um estudo posterior. A AGMA padronizou em equações os
métodos de determinação das tensões, de contato e de flexão, admissíveis para
projeto. A padronização ANSI/AGMA 2003-B97 define todos fatores relevantes para
as equações AGMA através de tabelas, gráficos, equações e recomendações.

80
Da mesma maneira que uma análise dinâmica não foi foco deste trabalho, a
determinação de materiais também não se tornou interessante, uma vez que,
depende diretamente dos fatores relacionados às tensões de contato e de flexão.

81
OBRAS CONSULTADAS
[1] SHIGLEY, J. E. Projeto de Engenharia Mecânica, 7ª edição. Porto Alegre:
Bookman, 2005.
[2] NORTON, R. L. Projeto de Máquinas, 2ª edição. Porto Alegre: Bookman,
2000.
[3] MABIE, H. H. Mecanismos y Dinámica de Maquinaria, 2ª edição. México,
Limusa Wiley, 1998.
[4] FAIRES, V. M. Diseño de Elementos de Máquinas, 4ª edição. Barcelona,
Montaner y Simon S. A., 1982.
[5] SHIGLEY, J. E. Elementos de Máquinas, volume 2. Rio de Janeiro: LTC
Editora Ltda., 1984.





























