Embed Size (px)
Citation preview

HyperCAL3D, UM SISTEMA INOVADOR PARA
AUXÍLIO AO PROCESSO DE ENSINO DE
GEOMETRIA DESCRITIVA
Fábio Gonçalves Teixeira UFRGS, Departamento de Design e Expressão Gráfica
Sérgio Leandro dos Santos UFRGS, Departamento de Design e Expressão Gráfica
Resumo
Este trabalho apresenta o HyperCAL3D, um aplicativo de apoio ao ensino de Geometria Descritiva, através do estudo de sólidos em sua versão mais rescente. São descritas as principais funcionalidades do aplicativo e a metodologia utilizada para a sua implementação. Dentre as principais funcionalidades apresentadas estão: a representação de linhas ocultas no modelo tridimensional e nas projeções, a representação de projeções nos planos de projeção, as mudanças de sistema de referência em tempo real e em 3D, a representação em épura. Todas estas ferramentas são implementa-das em um aplicativo que auxilia o processo de aprendizagem dos alunos e os procedimentos didáticos dos professores. Palavras-Chave: Geometria Descritiva, Design, HyperCAL3D.
Abstract
This work presents the HyperCAL3D, a computer application for learning support of Descriptive Geometry in its last version, 4.5. The main features of the application and the methodology for its implementation are described, including hiden lines representation in both model and projections; projection representation in several projection planes, referencial system changing in interctive way in real time; projections representation in 2D space. All these tools are implemented in an application that assists the learning process of students and teachers didactic procedures. Keywords: Descriptive Geometry, Design, HyperCAL3D.

1 Introdução
O grupo de pesquisa Virtual Design (ViD) da Universidade Federal do Rio Grande do
Sul (UFRGS) desenvolveu uma nova metodologia de ensino para a Geometria
Descritiva seguindo a abordagem da aprendizagem baseada em projetos (TEIXEIRA
et al., 2006), com o estudo de objetos sólidos, uma nova nomenclatura alinha aos
conceitos modernos de modelagem gráfica e o uso de ferramentas de computação
gráfica para auxiliar o processo de aprendizagem. Os principais objetivos são: reduzir
o grau da abstração necessário para aprender os conceitos básicos; aproveitar os
conhecimentos prévios dos estudantes; garantir o entendimento dos processos
bidimensionais e os seus correspondentes tridimensionais e estimular o processo de
aprendizagem a partir de problemas concretos com aplicações práticas.
Um dos pilares que sustenta esta metodologia é um aplicativo gráfico, o
HyperCAL3D (TEIXEIRA et al., 2007), o qual teve sua primeira versão em 2006 e era
baseado na linguagem VRML (AMES et al., 1997) e utilizava um plug-in para a
visualização das geometrias. Apesar de limitar as interações, o uso desta tecnologia
permitiu um rápido desenvolvimento da versão 1.0 (Figura 1a), o que garantiu a sua
disponibilização a tempo de ser utilizada no segundo semestre de 2006, quando a
nova metodologia foi implementada nas turmas de Geometria Descritiva do então novo
curso de Design da UFRGS.
Desde então, foram desenvolvidas novas versões com novos comandos e
melhorias das funcionalizadas existentes. A versão 2.0 (TEIXEIRA, 2010) introduziu a
tecnologia OpenGL, permitindo a um alto grau de interatividade, através da
manipulação dos modelos 3D (Figura 1b). Assim era possível selecionar arestas e
faces, sendo possível, inclusive, isolar determinadas faces selecionadas, facilitando o
processo de estudo de objetos em diferentes posições em relação ao sistema de
projeção. Esta versão também apresentava a representação de projeções, mas não
havia a diferenciação de linhas invisíveis.
A versão 3.0 introduziu um grande salto de qualidade, permitindo a criação de
planos de projeção auxiliares (Figura 1c). Assim, pela primeira vez, os professores e
os estudantes podiam criar novos planos de projeção auxiliares e manipulá-los em
tempo real em uma ambiente virtual tridimensional A estrutura de dados criada
permitia a criação de inúmeros planos de projeção em sequência (Figura 1d),
proporcionando um ganho, até então inimaginável na visualização deste tipo de
processo descritivo na Geometria Descritiva.
Atualmente, o HyperCAL3D está na versão 4.5 e dispõe de diversos recursos
inéditos em programas de ensino de Geometria Descritiva e mesmo em CADs
tradicionais. Os principais recursos disponíveis incluem a geração automática do

desenho em épura (Figura 1e) a partir do modelo 3D e transformação de uma das
vistas auxiliares em vista principal (Figura 1f), à escolha do usuário. Esta versão está
sendo utilizada pelos cursos de Engenharia, Arquitetura e Design da Universidade
Federal do Rio Grande do Sul desde março de 2013, possibilitando um grande ganho
de qualidade no processo de ensino-aprendizagem da Geometria Descritiva.
(a) (b)
(c) (d)
(e) (f)
Figura 1: As diversas versões do HyperCAL3D
desde 2006: a) HyperCAL3D
1.0, com interface VRML. b) HyperCAL
3D 2.0, com interface OpenGL. c) HyperCAL
3D 3.0 - Mostrando uma vista
auxiliar primária. d) HyperCAL3D
3.0 - Mostrando uma vista auxiliar secundária. e) HyperCAL3D
4.5 - Representação em épura. f) HyperCAL
3D 4.5 - Transformação de coordenadas.
Este trabalho apresenta os principais aspectos do HyperCAL3D, incluindo os
detalhes técnicos dos processos geométricos envolvidos, através de geometria
vetorial, além das principais funcionalidades da versão 4.5 do programa e os possíveis

impactos no ensino de Geometria Descritiva, disciplinas extremamente importante
para o desenvolvimento da visão espacial e do raciocínio lógico.
2 Metodologia de Desenvolvimento
Neste item, são abordados os principais aspectos metodológicos que suportam as
implementações gráficas do HyperCAL3D, incluindo a interface gráfica, as ferramentas
para geração das projeções, Mudanças de Sistema de Referência, representação de
linhas ocultas como tracejadas e a representação em épura.
2.1 Ambiente Gráfico Tridimensional
A tecnologia de processamento gráfico utilizada desde a versão 2.0 é a OpenGL
(WRIGHT e LIPCHAK, 2007), que é uma biblioteca gráfica padrão na indústria de
computação gráfica nos diversos segmentos, incluindo PCs, estações gráficas e até
dispositivos móveis, a qual disponibiliza uma API (Application Programming Interface)
que pode ser utilizada com diversas linguagens de programação. No HyperCAL3D, o
OpenGL é implementado por meio de uma biblioteca de alto nível, o GLScene,
compatível com a linguagem Delphi (que é a linguagem de programação utilizada
desde a versão 1.0), que consiste em uma série de componentes, que utilizam a API
do OpenGL, e que podem ser utilizados para construir aplicativos gráficos executáveis
sem depender de terceiros.
(a) (b)
Figura 2: Representação dos sólidos no HyperCAL3D. a) Forma apresentada ao usuário. b) Faces representadas por malhas na estrutura de dados.
A estrutura de dados para a representação dos modelos tridimensionais é
baseada em uma representação hierárquica dos objetos. Assim, um sólido é dividido
em faces e estas são subdivididas em malhas de triângulos. Isto é necessário, pois há
características geométricas em sólidos não convexos, como os furos e reentrâncias,
que podem inviabilizar a representação por um único polígono. Assim, cada face de
um sólido é, na verdade, uma malha de triângulos, o que permite a representação de

faces com geometrias complexas. A malha de triângulos é construída por um gerador
de malha especialmente desenvolvido, baseado na técnica advanced front (TEIXEIRA,
2003, p.9) e na triangulação de Delaunay (AGOSTON, 2005, p.722). A Figura 2
apresenta a representação de um sólido na forma que é apresentado ao usuário
(Figura 2a) e a representação da estrutura de dados (Figura 2b), a qual não é
percebida pelo usuário.
2.2 Sistema de Projeção Virtual
O sistema de projeção do HyperCAL3D trabalha com a mesma lógica do sistema
mongeano, onde cada plano de projeção é ortogonal aos planos adjacentes que forma
um diedro de projeção dois a dois. O programa permite sistemas de projeção com um
número ilimitado de planos, de tal forma que os sistemas de referência (SR) sejam
sempre definidos por pares de planos, um horizontal (PH) e outro frontal (PF). A Figura
3 ilustra muito bem esta organização, onde é possível observar os dois planos de
projeção originais, com os eixos do SR e dois outros planos, cada um com o SR
correspondente, os quais são compostos por pares de PH e PF, os quais são
representados em azul e verde, respectivamente.
Figura 3: Exemplos de pares de planos de projeção e seus sistemas de referência.
A projeção de um objeto do espaço tridimensional no plano se dá da mesma forma
que o processo gráfico utilizado na geometria descritiva. Porém, o processo utilizado
no HyperCAL3D utiliza a geometria vetorial. O algoritmo desenvolvido para realizar a
projeção considera que cada plano de projeção possui um sistema de referência local
(SRL) acoplado, onde o plano XY do SRL é coincidente com o plano de projeção.
Assim, cada vértice do sólido tem suas coordenadas computadas no SRL do plano de
projeção. A projeção de cada vértice é computada considerando como zero a

componente de Z das suas coordenadas no SRL e, em seguida, transformando
novamente para o SR global. A projeção do sólido é gerada unindo as projeções dos
vértices segundo a topologia do modelo sólido. Este procedimento é extremamente
simples e eficiente para a geração das projeções.
Figura 4: Esquema vetorial para o cálculo das coordenadas no SRL.
O processo para calcular as coordenadas no SRL é fundamentado no produto
escalar entre o vetor posição do vértice em relação à origem do SRL e os vetores
unitários dos eixos locais XL, YL e ZL. Cada um destes produtos escalares corresponde
às coordenadas locais no eixo correspondente.
2.3 Mudança de Sistema de Referência
A Mudança de Sistema de Referência (MSR), que é conhecida tradicionalmente como
Mudança de Plano de Projeção, utiliza o mesmo processo de projeção descrito no item
anterior. Neste caso, este procedimento é o equivalente vetorial ao processo gráfico
de traçar linhas de chamada perpendiculares à linha de terra e transportar as
coordenadas do plano de projeção anterior. Assim, o sistema de projeção
implementado no HyperCAL3D já comporta nativamente o processo de MSR, pois
admite múltiplos planos de projeção simultâneos. A grande inovação aqui está na
interface, a qual permite que o usuário insira um novo plano de projeção de forma
direta e manipule a sua posição em tempo real de forma interativa com mouse.
O posicionamento de um novo plano de projeção, que também é baseado em
processos vetoriais, utiliza as seguintes diretrizes:
O novo plano é sempre perpendicular a um plano de projeção existente;
O vetor normal do novo plano de projeção é sempre paralelo ao plano de
referência e sua direção é definida pela projeção do centro do sólido sobre o plano
de referência;
P
P
PA
U
A
A
Ai
Ak A
j
i
j k
'P

O plano de projeção é sempre orientado de tal forma que o sólido sempre esteja
posicionado no primeiro diedro.
Estes parâmetros permitem posicionar o novo plano de projeção de forma
interativa e em tempo real, pois os cálculos vetoriais envolvidos são simples e
possibilitam, ainda, a visualização dinâmica das projeções resultantes. Assim, o
posicionamento de um novo plano de projeção é definido pelo seu vetor normal e pela
origem do SRL.
O Quadro 1 descreve o processo interativo de definição de um novo plano de
projeção e como o programa processa as informações fornecidas pelo usuário para
definir o posicionamento e a orientação do novo plano de projeção utilizando
procedimentos de geometria vetorial.
O usuário seleciona o plano de projeção de referência:
o O vetor normal do plano de referência define o eixo YL do novo plano de projeção.
O usuário define a posição do centro do novo plano de projeção sobre o plano de referência:
o É criado um vetor, definido pela direção entre à projeção do centro do sólido no plano de referência e a posição definida pelo usuário, o qual irá corresponder ao eixo ZL.
o O eixo XL é definido pelo produto vetorial ZL= ZL x YL.
o O SRL é deslocado de tal forma que fique sempre evidente um triedro direto e um sistema de primeiro diedro.
Quadro 1: Processo interativo para a definição de um novo plano de projeção.
A direção do plano é definida pela posição selecionada pelo usuário. No entanto,
há uma ferramenta que permite definir determinadas direções com grande precisão,
de forma a atender às situações específicas da Geometria Descritiva. Para isso, o
usuário seleciona uma determinada projeção no plano de referência, a qual irá orientar
o plano de projeção de forma que este fique paralelo ou perpendicular à mesma. Esta
ferramenta foi implementada de forma que plano trava nestas posições quando o
usuário posiciona o plano de forma interativa próximo a estas posições.
A Figura 5a ilustra o processo de posicionamento do plano auxiliar de forma que o
mesmo fique perpendicular a uma direção selecionada, destacada com círculo na
figura. Neste caso, o objetivo é acumular uma das arestas do sólido e,
consequentemente, as faces que a contêm. Na Figura 5b, é acrescentado um segundo
plano auxiliar, que é perpendicular ao primeiro plano auxiliar, e paralelo à face
acumulada na MSR primária, a qual é selecionada para definir a direção paralela do
plano.

(a) (b)
Figura 5: a) Posicionamento do plano auxiliar de projeção perpendicular a uma direção selecionada. b) Posicionamento de um segundo plano auxiliar perpendicular ao anterior e
paralelo à projeção da face acumulada.
2.4 Representação de Linhas Ocultas
A correta representação de objetos sólidos, implica na representação adequada de
linha ocultas, aquelas que não são visíveis pelo observador. No HyperCAL3D, a
visibilidade é analisada no modelo 3D e nas suas projeções. A solução adotada utiliza
abordagens semelhantes nas duas situações e, o mais importante, utiliza a mesma
técnica da GD para verificar a visibilidade de linhas em épura.
Para verificar a visibilidade de uma linha em um plano de projeção na GD, são
analisados os cruzamentos de linhas e, nos pontos de interseção das projeções, é
verificada qual linha está mais distante do plano de projeção (ou mais próxima do
observador). Esta é a linha visível e a outra, consequentemente, é invisível. Este
processo é amplamente utilizado no ensino de GD e na solução de problemas de
visibilidade nas projeções de objetos. No HyperCAL3D, foi adotada uma técnica
semelhante.
A visibilidade do modelo sólido utiliza ferramentas da biblioteca OpenGL para
implementar um algoritmo do tipo ray casting (WATT, 1993), que traça um reta a partir
de qualquer objeto até à câmera e verifica a interseção desta com os objetos da cena
virtual. Assim, é possível verificar se existem faces ou arestas entre o ponto de origem
da reta e a câmera e as distâncias entre eles. Se houver, significa que o ponto não é
visível. Caso contrário, o ponto é visível. Assim, para cada aresta do modelo, é feita
uma amostragem de pontos e verificada a sua visibilidade. Podem haver três
situações de visibilidade: totalmente visível, totalmente invisível e parcialmente visível.
Nos dois primeiros casos, o processamento é concluído com verificação dos pontos
amostrais e a visibilidade da aresta define o tipo de linha a ser utilizado na
representação, linha contínua, para visível, e tracejada, para invisível.
No caso de a aresta ser parcialmente visível, é necessário determinar o ponto de
mudança de visibilidade (PMV), para definir corretamente a porção com linha tracejada
e aquela com linha cheia. O processo utilizado para encontrar o PMV da aresta é uma
bissecção da aresta, repetindo de forma iterativa o processo descrito anteriormente
para a verificação da visibilidade da aresta. O trecho entre os dois pontos cujas
visibilidades são distintas é dividido ao meio e são verificadas as visibilidades das
extremidades dos dois trechos resultantes. O trecho que possui extremidades com
visibilidades diferentes é o escolhido para reiniciar o processo de bissecção. Este
processo é repetido até que o trecho atinja uma dimensão inferior ao limite de precisão
determinado. A implementação deste algoritmo se mostrou apropriada à aplicação
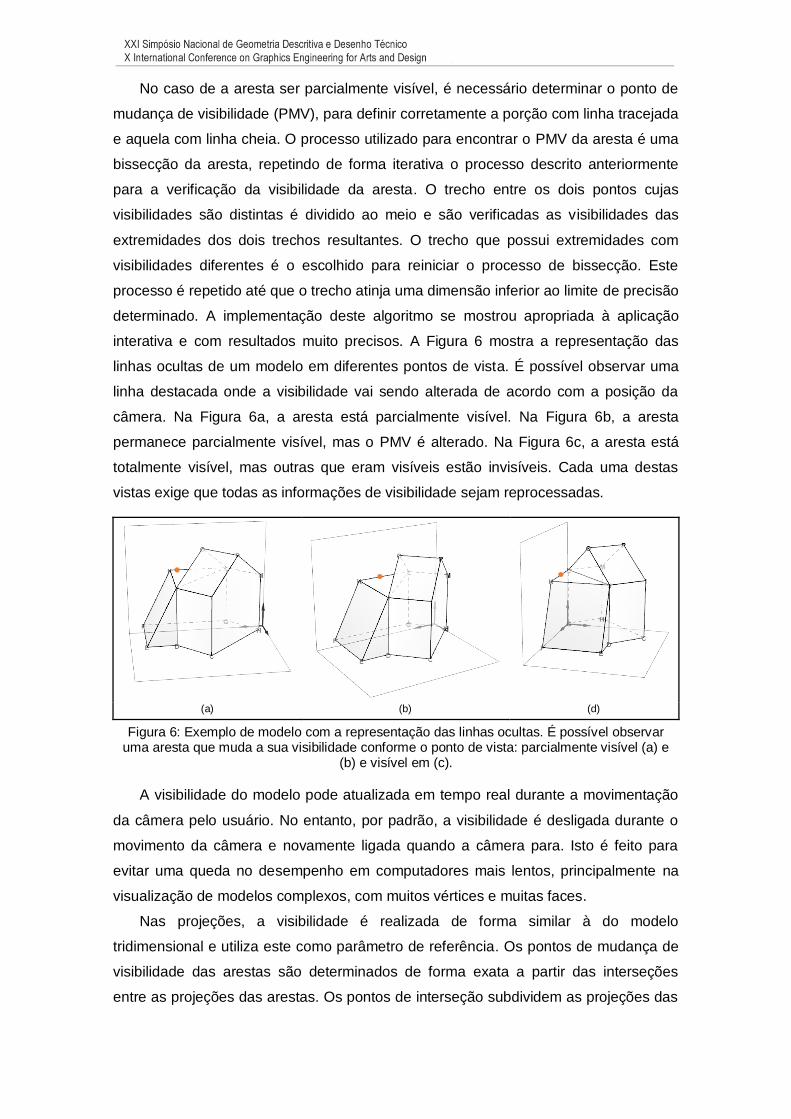
interativa e com resultados muito precisos. A Figura 6 mostra a representação das
linhas ocultas de um modelo em diferentes pontos de vista. É possível observar uma
linha destacada onde a visibilidade vai sendo alterada de acordo com a posição da
câmera. Na Figura 6a, a aresta está parcialmente visível. Na Figura 6b, a aresta
permanece parcialmente visível, mas o PMV é alterado. Na Figura 6c, a aresta está
totalmente visível, mas outras que eram visíveis estão invisíveis. Cada uma destas
vistas exige que todas as informações de visibilidade sejam reprocessadas.
(a) (b) (d)
Figura 6: Exemplo de modelo com a representação das linhas ocultas. É possível observar uma aresta que muda a sua visibilidade conforme o ponto de vista: parcialmente visível (a) e
(b) e visível em (c).
A visibilidade do modelo pode atualizada em tempo real durante a movimentação
da câmera pelo usuário. No entanto, por padrão, a visibilidade é desligada durante o
movimento da câmera e novamente ligada quando a câmera para. Isto é feito para
evitar uma queda no desempenho em computadores mais lentos, principalmente na
visualização de modelos complexos, com muitos vértices e muitas faces.
Nas projeções, a visibilidade é realizada de forma similar à do modelo
tridimensional e utiliza este como parâmetro de referência. Os pontos de mudança de
visibilidade das arestas são determinados de forma exata a partir das interseções
entre as projeções das arestas. Os pontos de interseção subdividem as projeções das

arestas em trechos que podem ser visíveis ou invisíveis. As visibilidades de cada
trecho das projeções de todas arestas são calculadas utilizando a mesma abordagem
baseada no ray casting, adotada para a visibilidade modelo tridimensional. No entanto,
a reta para verificar a visibilidade de pontos ou trechos específicos é traçada de forma
ortogonal ao plano de projeção (PP), iniciando em pontos das arestas do modelo e se
afastando do plano de projeção onde se quer determinar a visibilidade. O processo é
realizado a partir da verificação da ocorrência de faces que são interceptadas pela reta
de verificação que se afasta do PP. Se a reta intercepta algum face após se afastar do
PP partindo de uma trecho de uma aresta, significa que este trecho da projeção é
invisível neste PP. A Figura 7 ilustra este processo de determinação de visibilidade,
com a representação esquemática da reta traçada para verificar se há faces que
cobrem a aresta.
(a) (b)
Figura 7: Determinação da visibilidade da projeção de uma aresta. a) Aresta invisível na projeção frontal. b) Aresta invisível na vista auxiliar.
A visibilidade das projeções é atualizada em tempo real durante o posicionamento
do plano de projeção quando o mesmo é inserido. No entanto, após o posicionamento
do plano de projeção, a visibilidade não é atualizada a menos que o modelo seja
alterado. O reposicionamento da câmera não requer uma atualização da visibilidade
das projeções, uma vez que a visibilidade das projeções só depende da posição do
objeto em relação ao plano de projeção.
2.5 Representação em Épura
A representação automática em épura é uma ferramenta extremamente útil para o
ensino de GD. No caso do HyperCAL3D, este procedimento é feito diretamente a partir

do modelo tridimensional do sistema de projeção com todos os planos inseridos pelo
usuário.
A representação em épura dos objetos é feita rebatendo os planos de projeção um
a um, começando pelos últimos planos inseridos. Cada plano é rebatido sobre o seu
plano antecessor. O rebatimento do plano de projeção consiste em um rotação de 90º
em torno da linha de terra, incluindo as projeções contidas no mesmo. Este processo
de rebatimento consiste em um procedimento vetorial, onde é utilizada uma matriz de
rotação (SCHNEIDER e EBERLY, 2003, p.857) acoplada à linha de terra entre cada
SR. Para que seja possível realizar todos os rebatimentos de forma robusta, os planos
de projeção são organizados em uma estrutura de dados hierárquica do tipo árvore,
onde a raiz é o plano horizontal. Todos os demais planos são ramos que convergem
para a raiz.
(a)
(b)
Figura 8: Exemplos de épuras geradas com o HyperCAL3D a partir dos modelos tridimensionais.
Após montagem da árvore, cada plano é rebatido sobre o plano antecessor, na
árvore, começando pelos ramos mais externos e terminando no plano horizontal, o
único que não é rebatido. Para que um plano seja rebatido, toda a sua descendência
já deve ter sido rebatida. Outra regra importante é que quando um plano é rebatido,
todos os seus descendentes também o são. Esta sucessão de rebatimentos
organizados e orientados por esta estrutura tipo árvore resultam na planificação

completa do sistema de projeção. A Figura 8 apresenta dois exemplos de épuras
obtidas a partir de uma situação tridimensional onde foram realizadas duas MSR para
a obtenção de VG de faces oblíquas.
O rebatimento das projeções implica no rebatimento dos vértices, linhas de
chamada e arestas. Os eixos dos SR associados a cada plano de projeção também
são rebatidos. O resultado é uma representação em épura de grande qualidade gráfica
e em alta resolução, com controle de alias e a possibilidade de zoom e pan. Na
interface do HyperCAL3D, a representação em épura é uma das páginas (tabs) da
janela de visualização, as quais são ativadas a partir de abas no canto superior
esquerdo da mesma. A qualquer momento, é possível alternar entre a visualização do
modelo 3D e a representação em épura.
3 Considerações finais
O HyperCAL3D é um conjunto de algoritmos fundamentados em geometria vetorial
implementados em um ambiente gráfico tridimensional interativo, os quais reproduzem
a metodologia e os procedimentos gráficos utilizados na Geometria Descritiva. O
resultado é uma poderosa ferramenta, sem similar em nível nacional e internacional,
para o ensino desta disciplina tão importante para as habilidades de visão e raciocínio
espacial, fundamentais nas ações relacionadas ao projeto de artefatos nas diversas
escalas.
O programa continua em desenvolvimento e novas funcionalidades vêm sendo
implementadas, as quais auxiliam os alunos em seu aprendizado e também os
professores no preparo de material didático e como ferramenta de apresentação de
conteúdo, pois as operações e técnicas da GD podem ser apresentadas e
demonstradas em tempo real aos alunos durante as aulas expositivas.
Referências
AGOSTON, MK. Computer Graphics and Geometric Modeling. Springer-Verlag,
London, 2005.
AMES AL, NADEAU DR, MORELAND JL. The VRML 2.0 Sourcebook. New York:
John Wiley & Sons, 1997.
SCHNEIDER, P. and EBERLY, DH. Geometric Tools for Computer Graphics.
Morgan Kaufmann Publisher, San Francisco, USA, 2003.
TEIXEIRA, F.G. Modelamento Paramétrico e Geração de Malha em Superfícies
para Aplicações em Engenharia. 2003. 134f. Tese (Doutorado em Engenharia) -
PROMEC/ UFRGS, Porto Alegre, 2003.

TEIXEIRA FG, SILVA RP, SILVA TLK, HOFFMANN, AT. The descriptive geometry
education through the design-based learning. In: ICGG2006 - 12TH International
Conference on Geometry and Graphics. Proceedings... Salvador, 2006.
TEIXEIRA FG, SILVA RP, SILVA TLK, HOFFMANN AT, AYMONE JLF. HyperCAL3D
Modelador de sólidos para geometria descritiva. In: VII International Conference on
Graphics Engineering of Arts and Design e XVIII Simpósio Nacional de Geometria
Descritiva e Desenho Técnico, 2007, Curitiba. Anais... Curitiba, 2007.
TEIXEIRA, F. G. . HyperCAL3D 2.0, A Segunda Geração do Modelador 3D para
Geometria Descritiva. In: XXXVIII Congresso Brasileiro de Ensino de Engenharia,
2010, Fortaleza. Anais..., 2010.
WATT A. 3D Computer Graphics. 2nd Edition. Addison-Wesley, Harlow, England,
1993.
WRIGHT RS, LIPCHAK B. OpenGL Super Bible. Addison-Wesley Professional; 4
edition, 2007.




























