Embed Size (px)
Citation preview

Introdução
· o aluno deve conhecer eentender os procedimentos desegurança descritos no manualdo operador e manual doproduto.
• Adicionalmente as informaçõesde segurança que serãopassadas pelo instrutor, o alunodeverá observar osprocedimentos de segurançadescrito nos manuais.
• Compreender segurança e seusprocedimentos no trabalho comrobôs industriais é uma premissadeste treinamento.
1;.'1,0\88 Gt~x?,}Ma;: 23, 2',),·1 ~Sbj~ 2·1
Risco de acidentes
• Manutenção
• Reparos
• Mudança de programa
• Teste
• Operação
Sempre evite a área de risco!
~ ."'.a8 Gf,';3pMa, 23, 20!·\ i Slidt:26
J11111AII.I
UIIIII"1111

Travamento (power lock out & tag out)Utilize dispositivo de travamento para fontes de energia.
'VVa.rningHí~'"Jl")-";01'l:n90 jnsidc 1;hê c.:nOinet-...Nh -.
1,;.),:'.89 G!~~!PMa'i 23, 20',·1 ~SI:d'! 2;,:
Recursos de segurança dos robôs ABB
• Parada de emergência (ES)
• Modo de operação
• Automática
• Manual < 250 mm/s
• Manual 100%
• Dispositivo de segurança
em manual (Dispositivo dehabilitação)
• Dispositivo de segurança
em manual 100% (Hold-to-run)
• Cadeia de segurança
• Limite área de trabalho
~A!.mG!D:.i;l;,1a:; 2:3, 2-;:lÚ i Slôde 2?
AIII
AIII
Segurança - regulamentos
N Os robôs ABB cumprem as exigências requeridas na ISO10218, segurança de robôs Industriais. Os mesmostambém cumprem exigências da ANSI/RIA 15.06.
• Definição de segurança função/regulamento:
a Emergencystop-IEC204-1, 10.7
• Enabling device - ISO 11161, 3.4
· Safeguard - ISO 10218 (EN 775), 6.4.3
· Reduced speed - ISO 10218 (EN 775), 3.2.17
· Interlock - ISO 10218 (EN 775), 3.2.8
· Hold to run -ISO 10218 (EN 775), 3.2.7
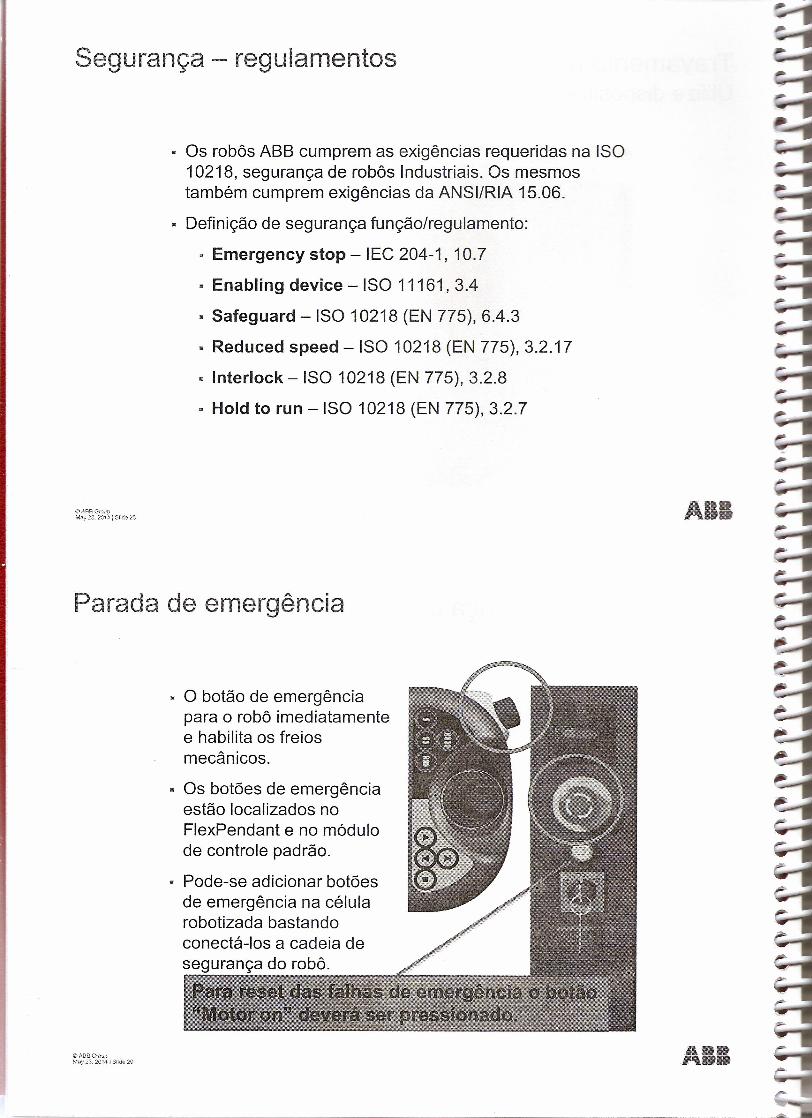
Parada de emergência
· o botão de emergênciapara o robô imediatamentee habilita os freiosmecânicos.
• Os botões de emergênciaestão localizados noFlexPendant e no módulode controle padrão.
• Pode-se adicionar botõesde emergência na célularobotizada bastandoconectá-Ios a cadeia desegurança do robô.

Modos de operação
t..,A8BGtc>,,!,~Aay23, :W:4 iSlid~ 3;:;
• Automático
• Modo de produção(sem limite develocidade e comsegurança automáticahabilitada) .
• Manual
• < 250 mm/s-velocidade máx. 250mm/s
• 100 % - Opcional.Programa pode sertestado sem limitaçãode velocidade.
Trava de segurança
;''';EH3GtC);.mM<I,23.2-,)14 !SIio.1e3~
· o dispositivo de habilitação possui três estágios(posições).
• Para ativação dos motores em modo manual o botãoprecisa necessariamente estar na posição intermediária.
• Os movimentos do robô irão parar imediatamente caso obotão seja solto ou pressionado até o final.
J~IIII

Hold-to-Run
• Opcional (esta função poderáser utilizada somente no modomanual 100%).
• No modo de operação manual100% os motores só serãoativados ao pressionarsimultaneamente o dispositivode habilitação e o botão "Hold-to-Run".
• Nas versões antigas o botãose encontra na parte de trás daFlexPendant
• Nas novas versões deFlexPendant, o botão Hold-to-Run é o próprio botão de inicio.Ao invés de pressiona-lo,mantenha o botão segurado.
Cadeia de segurança
• As conexões da cadeia de segurança possibilitam ointertravamento de equipamentos externos como portas, cortinasde luz, tapete de segurança, etc.
• Existem duas categorias de cadeia de segurança:
• Geral - A parada de segurança é ativada quando ocontrolador opera em qualquer modo de operação (GeneralStop, Superior Stop e Emergency Stop)
• Automático - A parada de segurança é ativada quando ocontrolador opera no modo automático (Automatic Stop)
• É possível configurar um retardo para atuação da cadeia desegurança (Soft Stop). O robô irá parar aproximadamente 1segundo após acionamento da cadeia de segurança sem desviarda trajetória original do programa, isso ocorre devido a um retardono desligamento dos motores.
c., ABil G~i)'illMHy~. 2Q,4 i SHde Z3
AlllU"IIU

Limitando a área de trabalho
0A88 o-coeM3'j 7':', 20,:1 i Snce 2-1
• Para evitar riscos de colisãoentre o robô e equipamentosdentro da área de trabalhodo robô, por exemplo ofechamento de segurança. Aárea de trabalho do robôpode ser limitada:
• Todos eixos podem serlimitados via software
• Os eixos 1, 2 e 3 podemser limitadosmecanicamente atravésde batentes e chaves fimde curso (Limit Switches)
EPS e SafeMove
@ABR Gr!)~!PMa,. 23. 20U i suce %
EPS: Supervisão dos eixos dorobô sem a necessidade dechaves de fim de curso
• SafeMove: Supervisão de umaárea de trabalho do robô.

Ferramentas de manipulação
.. Toda ferramenta de manipulação (garras) deve serprojetada para não soltar a peça em caso de pane .
.. O projeto deverá possibilitar liberação da peçamanualmente .
• Ferramentas com rotação devem possuir proteção e serdesligadas ao entrar na célula.
Eletricidade
• Alta tensão de alimentação nos painéis de controle emanipulador
• Módulo de controle (Control Module)
• Alimentação da fonte - 230 VAC
• Outros equipamentos do usuário
• Alimentação de entradas e saídas - 24 VOC
• Módulo de acionamento (Orive Module)
• Alimentação da rede - 220 até 600 VAC
• Alimentação da fonte - 230 VAC
• Alimentação para drives - 370VOC até 700 VOC
• Alguns componentes possuem capacitores e portantomesmo com o painel desernegizado poderá haver carga.

Liberando os freios
• Os freios dos motores do robôpodem ser liberadosmanualmente.
• Antes de liberar o freio,certifique-se que o braço dorobô esteja apoiado a fim denão provocar acidentesenvolvendo pessoas ouequipamentos.
4.:"'> •.\.B8G'-:>;:pM<1:i2:::·,20 ;·1 1 Sltde ss
~;:'.88(~o~;pMa, 23. 2Cn·' i Slid~ 39





























