Embed Size (px)
Citation preview

195

196

197

198

199

200

201

202

203

204

205

206

207

208

209

210

211

212

213

214

215

216

217

218

219

220

221

222

223

224

225

226

227

228

229

230

231

232

233

234

235

236

237

238

239

240

241

242

243

244

245

246

247

248

249

250

251

252

253

254

255

256
CAPÍTULO 8
CARACTERIZAÇÃO DOS SINAIS ALEATÓRIOS
PROCESSOS ALEATÓRIOS
Um processo aleatório (ou estocástico) é uma família
de variáveis aleatórias X(t), t ∈ I, onde t é um parâmetro
pertencente a um intervalo I. O intervalo I pode ser
contínuo ou discreto, no conjunto dos Reais ou dos Inteiros.
No estudo dos processos aleatórios voltados para
telecomunicações, X(t) é um sinal aleatório e t é a
variável tempo.
Exemplo:
Tem-se um processo aleatório tal que a v.a. assume 4
valores equiprováveis, sendo x1(t) = sen(t); x2(t) = sen(2t);
x3(t) = sen(3t); x4(t) = sen(4t).
Esses sinais formam em sistema em comunicações digitais,
um tipo de transmissão chamado de FSK (Frequency Shift

257
Keying) com 4 possibilidades (2 bits) ou também
chamado de 4-FSK.
Assume-se que p(x1) = p(x2) = p(x3) = p(x4) = 0,25.
Podemos também definir este processo como:
X(t,k) = sen(k t) com p(X=k) = 0,25
k=1,2,3 e 4
As formas de onda sen(k t) são conhecidas como
funções amostras, cada uma correspondendo a um ponto
amostra X = k.
O conjunto total de formas de onda é chamado de
“Ensemble” (todas as partes consideradas como um todo –
efeito total).
Outro exemplo:
Seja um sinal (ruído) na saída de um receptor de um
sistema de comunicações, onde não se transmite nenhum
sinal (do transmissor) apenas deseja-se observar o ruído
externo que entra no receptor. A experiência aleatória

258
consiste na observação da forma de onda quando o sistema
é ligado. A primeira vez que o sistema é ligado
corresponde ao ponto amostra x1, a 2a vez corresponde ao
ponto amostra x2, etc. Podemos representar graficamente
o processo como na Figura1:
Pelo exemplo anterior pode-se notar que a descrição
detalhada do processo, isto é, definir suas formas de onda e
seu conjunto de probabilidades, pode ser bastante difícil, já
que não temos esses parâmetros em forma fechada
t = 0
x(0)
x2(t)
t
t
t
t = t1 t = t2 t = t3
x(t2) x(t1) x(t3)
x1(t)
xn(t)
.
.
.
Figura 1 Representação de um processo aleatório

259
(definição das equações das formas de ondas e as equações
que definem o modelo probabilístico).
Outros exemplos:
1) X(t)= A cos(2 π f0 t + θ) conforme Figura 2 onde A e
f0 são constante e θ é uma v.a. uniformemente distribuída
em (0, 2π).
Nesse caso, se θ for também uma função do tempo ( θ(t) )
poderíamos estar representando uma modulação PM ou
FM.
Nesse caso específico temos as seguintes médias
estatísticas:
E(X) = E [A cos(2 π f0 t + θ) ] = A E [cos(2 π f0 t + θ)] =
θ
- A
A
2 π
f(θ)
Figura 2 Função de cossenoidal de θ(t)

260
A ∫ cos(2 π f0 t + θ) dθ = 0.
E(X2) = E [A2 cos2(2 π f0 t + θ) ] =
= A2 /2 E [1 + cos(2 π 2f0 t + 2θ)] = A2 / 2.
A função densidade de x(t) é obtida como:
1
X0
H (x)
1f ( ) 2f (x)dx A sen(w t )d −
θ
θ=
θ π= =+ θ
θ
02 2
A x A
X
22 2
A x A
1
2 A x
f (x)1
2 A x
<θ<π
− < <
π<θ< π
− < <
π −
= π −
2 2X
1x ( A, A)
f (x) A x0 x ( A, A)
∈ −= π − ∉ −
Outro exemplo:
2) X(t) = a t + b t > 0.

261
onde b é uma constante e a é uma v.a. N(0,1)
E(X) = E [ a t + b ] = t E[ a ] + b = b
( E [ a ] = 0.)
E(X2) =E [ ( a t + b )2 ] = E[ a2 t2 + b2 + 2 a t b ] =
= t2 E[ a2 ] + b2 + 2 t b E[a] = t2 + b2
onde E[ a2 ] = Var(a) + E(a) 2 = 1 + 02 = 1.
2
2
2
a
(x b)2
2 tX
x ba
t
1e
12f (x) e xt t 2
−−
−
−=
π= = ∈π
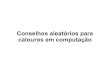
- 4 - 3 - 2 - 1 0 1 2 3 40
0 . 0 5
0 . 1
0 . 1 5
0 . 2
0 . 2 5
0 . 3
0 . 3 5
0 . 4
t = 1 fX(x,1) X é Normal(0;1)
Figura 3 Função densidade para t = 1 é uma normal de σ2=1

262
Descrição de um “Ensemble”
Um processo estocástico é descrito pelo seu
“ensemble” e as probabilidades medidas no mesmo, ou
seja, é necessário o conhecimento da n-ésima ordem da
distribuição conjunta de x1 x2 ... xn. Sabendo-se a
distribuição da n-ésima ordem, sabe-se a distribuição das
ordens inferiores através de integrações sucessivas da
função densidade de probabilidade conjunta.
Estatísticas de 1a ordem
As estatísticas de 1a ordem nos dão as estatísticas a
respeito da amplitude das funções amostras para qualquer
valor do parâmetro t (tempo).
t = 10 fX(x,10) X é Normal(0;100)
Figura 4 Função densidade para t = 10 é uma normal de σ2=100
- 4 0 - 3 0 - 2 0 - 1 0 0 1 0 2 0 3 0 4 00
0 . 0 0 5
0 . 0 1
0 . 0 1 5
0 . 0 2
0 . 0 2 5
0 . 0 3
0 . 0 3 5
0 . 0 4

263
É importante então, o conhecimento da distribuição de
X, isto é, f(x,t). Dessa maneira podemos obter E[x(t)],
E[ x2(t)], etc. E[x(t)] = x(t) x(t) f (x, t) dx= ∫
E[x2(t)] = 2 2x (t) x (t) f (x, t) dx= ∫
Estatísticas de 2a ordem
É importante porém sabermos qual o relacionamento,
ou melhor, qual o grau de dependência entre as amplitudes
de uma função amostra em instantes distintos. Isto é obtido
através da correlação entre as variáveis e dessa forma
fazemos uso da função densidade de probabilidade
conjunta entre x(t1) e x(t2), amplitudes de x(t) em dois
instantes de tempo quaisquer.
x2(t)
t
t
t
x1(t)
xn(t)
.
.
.
Figura 5 Gráfico dos ensembles de dois diferentes processos aleatórios. O da esquerda é sinal de alta freqüência e o da direita é um sinal de baixa freqüência.
t1 t2 t1 t2

264
Na figura 5 nota-se que o gráfico da direita, o sinal
varia lentamente e dessa forma, existe uma dependência da
amplitude do sinal no instante t1 [ x(t1) ] e uma outra
amplitude no instante t2 [ x(t2) ], onde a diferença de
tempo entre t1 e t2 não é muito grande (intervalo
relativamente pequeno entre t1 e t2). Já na figura da
esquerda, a dependência é quase que nenhuma para os
mesmos instantes de tempo (mantendo o mesmo intervalo
de tempo), pois o sinal varia muito mais rapidamente.
Dessa forma podemos notar que para um intervalo (t1,t2)
fixo, a dependência será maior ou menor dependendo do
conteúdo de freqüência (Hertz) do sinal em estudo. Essa
dependência está no sentido de se poder predizer (estimar)
o valor de x(t2) com um certo grau de precisão,
conhecendo-se o valor de x(t1).

265
Função autocorrelação
Quando se definiu o coeficiente de correlação como
2 2X Y
E[(x x)(y y)]− −ρ =
σ σ
A expressão E[(x x)(y y)]− − foi denominada de covariância
entre x e y por causa da analogia com a variância de X que
é obtida como 2 2X E[(x x) ]σ = − e a de Y como
2 2Y E[(y y) ]σ = − .
Pode-se deduzir a seguinte expressão:
E[(x-x)(y-y)] = E[(xy)] - x y
onde a função E[xy] é chamada de correlação entre X e Y.
Quando as variáveis aleatórias são independentes, temos:
E[xy] = E[x] E[y] =x y , fazendo com que ρ seja igual a
zero.

266
Vale ressaltar que este princípio de correlação entre
duas funções é bastante utilizado na deteção de sinais
transmitidos através de um sistema de comunicações
digitais, como por exemplo, sinais de telefonia celular.
Também deve-se mencionar aqui que a função de
autocorrelação é bastante usada para transmissões usando-
se DPCM (Differencial Pulse Code Modulation); em
filtragem adaptativa, etc.
Pode-se calcular a correlação de x(t) em dois instantes
de tempo diferentes t1 e t2 para se obter um “grau” de
relacionamento entre as amplitudes de x(t) nesses instantes.
Nesse caso essa função é denominada de função
autocorrelação, pois se trata do mesmo sinal x(t) obtido em
dois instantes distintos.
Com isso, pode-se tentar predizer o valor de x(t2), com
um certo grau de precisão, dados o valor da autocorrelação
e o valor de x(t1). Por esse motivo, é importante então
calcularmos a função de autocorrelação entre dois instantes
quaisquer de x(t).

267
A função de correlação entre dois instantes quaisquer
de x(t), isto é, a função de autocorrelação de x(t) é
simbolizada por RX(t1,t2) = E[x(t1)x(t2)].
Exemplo:
1. Achar a autocorrelação do processo aleatório x(t):
x(t) = a t + b com b constante e sendo a, uma
variável aleatória N(0,1).
RX(t1,t2) = E[(a t1 + b a t2 + b] =
E[a2 t1 t2 + t1 b a + t2 b a + b2]
RX(t1,t2) = t1 t2 + b2
já que E[a] = 0 e E[a2] = 1.
2. Achar a autocorrelação do processo aleatório x(t):
x(t) = A cos(2 π f0 t + θ) onde A e f0 são constante
e θ é uma v.a. uniformemente distribuída em (0, 2π).
RX(t1,t2) =E[ A cos(2 π f0 t1 + θ) A cos(2 π f0 t2 + θ) ]

268
RX(t1,t2) = E[A2 cos(2 π f0 [t2-t1] ) / 2 ] +
E[A2 cos(2 π f0 [t1+t2]+ 2θ) / 2 ]
RX(t1,t2) = A2 cos(2 π f0 [t2-t1] ) / 2
Sendo que foram usadas as seguintes igualdades:
E[A2 cos(2 π f0 [t1-t2] ) / 2] = A2 cos(2 π f0 [t1-t2] ) / 2
e
E[A2 cos(2 π f0 [t1+t2]+ 2θ) / 2] = 0.
Definições:
1) Processo aleatório estacionário:
Um processo aleatório é dito estacionário se as
estatísticas de todas as distribuições de probabilidade
conjuntas de qualquer ordem, são invariantes no tempo, isto
é, são invariantes com o deslocamento no tempo. Quando
o processo é estacionário para todas as ordens, dizemos que
ele é estacionário no sentido estrito (rigoroso ou rígido, da
definição).

269
Implicação da estacionaridade para as Estatísticas de 1a
ordem:
Para a 1a ordem, a função densidade de probabilidade
contínua (ou a função de probabilidade discreta) de um
processo tem que ter suas estatísticas independentes do
tempo, isto significa que:
f( x(t) ) = f( x(t+ta) )
para qualquer valor de t e da constante ta.
Logo, para isso ocorrer, f( x(t) ) não pode depender do
tempo
As estatísticas mais comuns de 1a ordem são:
E[x(t)] = constante 1 (média de x)
E[x2(t)] = constante 2 (média quadrática)
VAR[x(t)] = constante 3 (variância de x(t))
Sendo estes valores constantes, eles serão independentes do
tempo.

270
E de modo geral (menos comum), teríamos:
E[gx(t)] = constante
onde g . é uma função qualquer de x(t).
Implicação da estacionaridade para as Estatísticas de 2a
ordem:
Para a 2a ordem, a função densidade de probabilidade
conjunta contínua (ou a função de probabilidade conjunta
discreta) de um processo em dois instantes quaisquer de
tempo tem que ter suas estatísticas independentes do
deslocamento com o tempo, isso significa dizer que:
f( x(t1), x(t2) ) = f( x(t1+ta), x(t2+ta) )
ou seja, a função conjunta em dois instantes de tempo só
depende do intervalo de tempo (t2-t1) e não, onde se
encontra esse intervalo de tempo (onde começa e onde
termina o intervalo). Isso porque dessa forma, não irá
depender do deslocamento com o tempo.

271
A estatística de 2a ordem mais usada é a função
autocorrelação RX(t1,t2). No caso de se ter um processo
estacionário, a autocorrelação seria função só de (t2-t1). É
comum então usar RX(τ) como notação para a função
autocorrelação de um processo estacionário, onde τ =(t2-t1).
No exemplo 1 anterior, o processo X(t) = a t + b não é
estacionário, pois a sua função de autocorrelação é igual a
RX(t1,t2) = t1 t2 + b2 que é função de t1 t2 e não de (t2-t1).
Já no exemplo 2 acima, o processo
X(t) = A cos(2 π f0 t + θ) pode ser estacionário no sentido
estrito pois ele é estacionário até a 2a ordem. A
estacionaridade de 2a ordem vem do fato que a sua função
autocorrelação é igual a
2
X 1 2 0 2 1AR (t ,t ) = cos[2 f (t -t ) ]2
π
que pode ser colocada da seguinte forma:
2
X 0AR ( ) = cos(2 f )2
τ π τ
já que essa autocorrelação só depende da diferença dos
instantes de tempo, simbolizada como a variável τ.

272
Implicação da estacionaridade para as Estatísticas de n-
ésima ordem:
Para a na ordem, a função densidade de probabilidade
conjunta contínua (ou a função de probabilidade conjunta
discreta) de um processo em n instantes quaisquer de
tempo tem que ter suas estatísticas independentes do
deslocamento com o tempo, isso significa dizer que:
f( x(t1), x(t2), x(t3), … , x(tn) ) =
f( x(t1+ta), x(t2+ta), x(t3+ta), ... , x(tn+ta) )
ou seja, a função conjunta em n instantes de tempo
deverá depender dos intervalos de tempo (t2-t1 ), (t3-t1 ), ...
(tn-t1 ), …, (t3-t2 ), (t4-t2 ) ... , ... (tn-tn-1), etc.
De modo geral, não se trabalha com estatísticas de
ordem maior que 2, até porque são de pouco interesse.
Uma observação importante é que nos sistemas fisicamente
realizáveis, não existe Processo Estatístico Estacionário
porque essses sistemas têm tempo de duração finito,
fazendo com que haja uma dependência no tempo. Porém
o estado estacionário (steady state) de alguns sistemas pode
ser aproximado por um Processo Estatístico Estacionário.

273
2) Processo aleatório estacionário de ordem finita:
Quando o processo é independente do deslocamento
no tempo até a k-ésima ordem, diz-se que ele é
estacionário de ordem k. Se a k-ésima ordem é
independente do deslocamento no tempo então, todas as
ordens inferiores também serão.
3) Processo aleatório estacionário no sentido amplo:
Diz-se que um processo é estacionário no sentido
amplo (fracamente estacionário) se o valor esperado
E[x(t)] do processo é constante e a função de
autocorrelação só depende da diferença t2-t1 = τ ou seja,
E[x(t)] = x(t) = constante = x(t) e
E[x(t1) x(t2)] = RX(t2-t1) = RX(τ)

274
Observações:
a) Quando duas variáveis aleatórias têm distribuição
conjuntamente Normal, prova-se que: se o coeficiente de
correlação é zero, então estas distribuições são
independentes;
b) Mostra-se também que se um processo estocástico
Normal é estacionário no sentido amplo, ele é também
estacionário no sentido estrito.
4) Processo aleatório Ergótico
A ergoticidade do processo vem da necessidade de se
obter estatísticas do processo a partir de uma única
observação temporal, isto é, de um único sinal amostra x(t).
Dessa forma, um processo estocástico é dito ergótico (ou
ergódigo) se as suas médias no tempo são iguais às suas
médias obtidas pelo ensemble estatístico.
Assim poderíamos por exemplo, obter a distribuição
de probabilidade do processo e estatísticas de interesse
através de um único sinal amostra. Por exemplo, na figura

275
a seguir temos uma função amostra de um sinal aleatório
ergótico, a qual foi amostrada (discretizada no tempo) em
intervalos iguais a T (intervalo de observações). O valor de
T deve respeitar à taxa de Nyquist para amostragem de
sinais (T deve ser menor ou igual ao inverso do dobro da
máxima freqüência em Hertz do sinal).
Podemos obter a probabilidade de intervalos através
de: N
fProb x(t) X(t) x(t) dx(t) limN
→∞
< < + =
onde f é o número de vezes (freqüência) com que as
amostras de X(t) apareceram no intervalo dado e N é o
número de observações realizadas.
T
t
Figura 6 Representação de x(t)

276
Podemos obter também outras estatísticas do processo
ergótico a partir do sinal amostra dado. O interesse usual é
que a média do processo e a função de autocorrelação do
processo ergótico. Dessa forma, sendo X(t) um processo
ergótico, teremos:
x x(t) ; R( ) x(t) x(t ) >= < > τ = < +τ onde,
L/2
L L/2
L/2
L L/2
x E[ x(t) ] x f (x) dx
1x(t) lim x(t) dtL
R( ) E[ x(t) x(t ) ] x(t) x(t ) f (x(t),x(t )) dx(t) dx(t )
1x(t) x(t ) lim x(t) x(t ) dtL
+∞
−∞
→∞ −+∞ +∞
−∞ −∞
→∞ −
= =
< > =
τ = +τ = +τ +τ +τ
< +τ >= +τ
∫
∫
∫ ∫
∫
Conclui-se da definição que um processo ergótico é
necessariamente estacionário no sentido estrito já que as
médias estatísticas não são funções da escala de tempo, isto
é, não se modificam com o deslocamento no tempo. O
contrário não é verdade, isto é, se o processo é estacionário,
êle pode ou não ser ergótico. É comum também se
referenciar a processos ergóticos àqueles processos em que
somente as médias estatísticas de 1a e de 2a ordens são
iguais às correspondentes médias no tempo, não se dando

277
importância às estatísticas de ordem superior a dois. Nesse
caso, se o processo é ergótico, ele também será estacionário
no sentido amplo, podendo ou não ser estacionário no
sentido estrito.
Como exemplo de processo estacionário mas não
ergótico, podemos ter uma fonte de tensão DC de 12 Volts.
Diariamente, ela é acionada e se mantém constante durante
todo o período em que está ativa. Assim obtemos várias
funções-amostra do processo, definido como a saída da
fonte de tensão. Seguem-se na Figura 7, algumas amostras
da saída.
Volts 12,2 0
t
X1(t) Volts 11,9 0
t
X2(t)
Volts 12,1 0
t
X3(t) Volts 12,15 0
t
X4(t)

278
Pode-se notar que as médias estatísticas não dependem
do tempo. Da mesma forma, qualquer outra estatística
utilizando as funções-amostra, independerá do tempo.
Conclusão: o processo é estacionário. As médias temporais
serão diferentes. Logo o processo não é ergótico.
Podemos observar que x(t)< > corresponde ao valor
médio do sinal (valor DC) e que
L/22 2L/2L
1x (t) lim x (t)d(t)L −→∞
< >= ∫
corresponde à potência média total do sinal x(t). Dessa
forma, para sinais ergóticos, o valor médio do processo é o
valor DC do sinal e a autocorrelação do processo para o
deslocamento τ igual a zero, ou seja, R(τ = 0) é a potência
média total do sinal. Além disso, a variância do processo é
obtida por: 2 2 2 2E[x (t)] E[x(t)] R(0) [x]σ = − = −
Volts 11,95 0
t
X5(t) Volts 12,02 0
t
X6(t)
Figura 7 Algumas funções-amostra do exemplo

279
que corresponde, para sinais ergóticos, à potência média
AC do sinal.
Para melhor visualização dos processos aleatórios,
podemos colocar uma Figura 8 ilustrativa das várias classes
de processos, conforme mostrado a seguir.
Processos aleatórios (genéricos)
Processos estacionários no sentido amplo
Processos estacionários no sentido estrito
Processos Ergóticos
Figura 8 Representação dos vários tipos de processos aleatóros

280
Na prática é difícil saber se um processo é ou não
estacionário ou ergótico. Pode-se calcular várias médias
estatísticas (nos ensembles) em instantes distintos então,
utilizando-se testes estatísticos (paramétricos ou não-
paramétricos) sobre as médias observadas, aplicam-se
testes de hipóteses.
Correlação cruzada
Para dois processos x(t) e y(t) define-se a correlação
cruzada como XY 1 2 1 2R (t , t ) E[x(t ) y(t )]= .
Os processos x(t) e y(t) são ditos conjuntamente
estacionários no sentido estrito, se a função de distribuição
conjunta de ' ' ' '1 2 3 1 2 3k kx(t ) x(t ) x(t ) ... x(t ) y(t ) y(t ) y(t ) ... y(t )
é invariante com o deslocamento no tempo.
Os processos x(t) e y(t) são ditos estacionários no
sentido amplo se seus valores médios e a correlação
cruzada são invariantes com o deslocamento no tempo.
Nesse caso XY XY XY1 2 2 1R (t ,t ) R (t t ) R ( )− τ= = .

281
Os processos x(t) e y(t) são ditos ergóticos se o valor
médio de qualquer função de x e de y (média estatística) é
igual ao correspondente valor médio no tempo.
Para a correlação cruzada tem-se que:
L
L/2
XYL/2
1lim
Lx(t) y(t ) dt x(t) y(t ) p (x,y, ) dx dy
→∞
+∞ +∞
− −∞ −∞+τ = +τ τ∫ ∫ ∫
Densidade espectral de potência
Para sinais determinísticos sabe-se que a função de
correlação R(τ), calculada como a média no tempo e a
densidade espectral de potência G(f) formam um par de
Fourier.
Como sempre estamos interessados em saber as
amplitudes significativas das componentes do sinal na
freqüência, o problema que aparece agora é saber se um
sinal aleatório pode ser descrito em termos de componentes
no domínio da freqüência. Embora o sinal estocástico

282
tenha diversas formas de onda (formas de onda aleatória)
que podem ser de número infinito, êle pode ser descrito em
termos de valores médios, um dos quais é a autocorrelação.
No caso de sinais ergóticos como as médias das
distribuições são iguais às médias no domínio do tempo, a
autocorrelação será uma função independente da escala de
tempo, ou seja, será constante para um mesmo
deslocamento de tempo. Dessa forma, o espectro de
potência do sinal também independe da escala de tempo, ou
melhor, independe das funções amostras (formas de onda).
Conclui-se que o processo ergótico tem um espectro
de potência médio único, característico do mesmo, ou seja,
todas as funções amostras terão um espectro de de potência
médio representativo das suas componentes em freqüência.
Fica claro que o espectro de potência do sinal aleatório não
pode determinar um uma única forma de onda. Menciona-
se também espectro de potência, porque supõe-se que o
sinal aleatório exista durante o tempo todo pois caso
contrário êle não seria estacionário e dependeria da escala
de tempo.

283
Definição da densidade espectral de potência de sinais
aleatórios:
Seja uma função amostra x(t). Definimos uma
função truncada a partir de x(t) e sua correspondente
transformada de Fourier:
T
T/2j t j tT T T/2
x
Tx(t) t2(t) X (f ) x (t) e dt x(t) e dtTo t2
+∞ +− ω − ω−∞ −
≤= = =
>∫ ∫
Para sinais determinísticos, G(f) é definido como 2
TT
1lim X (f )T→∞
Porém para sinais aleatórios afim de se
incluir todas as estatísticas do sinal, ou seja, as funções
amostras, define-se a densidade espectral de potência
como:
X
2
TTEG (f ) 1lim X (f )
T
→∞=
onde as ordens de limite e média estatística não podem ser
trocadas. Pode-se escrever GX(f) também da forma:
T T
X
jX
R ( )
x (t) x (t ) dtT
G (f ) E e d1limT
+∞
−∞
+∞ − ωτ−∞
τ
+τ→∞
= τ∫∫ 1444442444443

284
e nesse caso, GX(f) e RX(τ) formam um par de Fourier.
Mostração:
Seja uma função amostra qualquer. Pode-se calcular
2
T1 E[ X (f ) ]T
e depois fazer o limite quando T → ∞. A
expressão 2
TX (f ) é conhecida como periodograma e é
utilizada, utilizando-se uma “janela” apropriada para a
estimativa da densidade espectral de sinais aleatórios.
Pode-se fazer *T T
2
T X (f )X (f )1 1E[ X (f ) ] E[ ]T T
= onde o *
significa o complexo conjugado. Temos então que:
1 21 2
T/2 T/2j2 f t j2 f t1 2T/2 T/2
dt dt2
T x(t ) e x(t ) e1 1E[ X (f ) ] E[ ]T T
+ +− π π
− −= ∫ ∫
1 21 2
T/2 T/2 j2 f t j2 f t1 2T/2 T/2
dt dtx(t )e x(t )e1 E[ ]T
+ + − π π
− −= ∫ ∫
1 21 2
T/2 T/2 j2 f t j2 f t1 2T/2 T/2
dt dtE[ x(t ) x(t ) ] e e1T
+ + − π π
− −= ∫ ∫
X 1 2, 1 2T/2 T/2 j2 ft j2 ft
1 2T/2 T/2dt dtR (t t ) e e1
T+ + − π π
− −= ∫ ∫

285
Como estamos supondo que o processo x(t) é estacionário,
R(t1,t2) = R(t2-t1) = R(τ) fazendo-se t2-t1 igual a τ, a
integral dupla pode ser calculada no plano t1 t2 como:
X 1 2
T/2 T/2 j2 fT/2 T/2
dt dtR ( ) e1T
+ + − π τ− −
τ= ∫ ∫
Deve ficar claro que o termo t2-t1 na exponencial e no
argumento da função de autocorrelação foi substituído por
τ e a integral no plano t1 t2 é obtida para o valor de τ igual
a uma constante, ou seja, em retas de τ igual a uma
constante. A figura 9 mostra os limites da integração.
Estamos fazendo t2-t1 = τ = constante. No plano t1 t2 a
reta t2-t1 = τ ou t2 = t1 + τ é uma reta de inclinação de
45 graus, conforme mostrado na figura, onde também é
mostrado para cada reta, o valor de τ.

286
Como na integral dupla acima aparece o termo t2-t1 = τ,
pode-se fazer uma mudança de variável, para que a integral
τ = -T/4
τ = T
τ = 0
τ = T/4
τ = -T
t2 – t1= τ
t2 – t1= τ + dτ
T+ τ T/2
t2
-T/2
T/2 - T/2 t1
T- τ
Figura 9 Limites de integração da função autocorrelação

287
seja calculada no plano t2 x τ. Então teremos a expressão
X
X
2
2
1 2
2
2 1T/2 T/2 j2 f (t t )
2 1T/2 T/2
T t j2 f0 t T
dt dt
d dt
R (t t ) e
R ( ) e
1T1T
−+ + − π
− −
− π τ−
=−
τ τ
∫ ∫
∫ ∫
calculada no plano t2 x τ, conforme mostrado na figura
A integral no plano t2 x τ também pode ser calculada como
T T
2 2X XT T
2 2
2 2
0 Tj2 f j2 fT 0
dt d dt dR ( ) e R ( ) e1 1T T
τ+ − π τ − π τ− − τ−
+τ τ τ τ∫ ∫ ∫ ∫
Integrando-se em t2 , obtém-se:
0 Tj2 f j2 fX XT 0
(T ) R ( ) e d (T ) R ( ) e d1 1T T
− π τ − π τ−
+τ τ τ+ −τ τ τ∫ ∫
-T/2
T/2
τ
T/2
-T/2
t2
Figura 10 Representação da integral de RX(τ) no plano (τ, t2)

288
ou ainda, como T
T j2 fXT
(1 ) R ( ) e dτ+ − π τ−
− τ τ∫
A função T
(1 )τ− no domínio de τ é um triângulo,
centrado em τ = 0 e indo de τ = -T a τ = T.
Passando-se para o limite quando T → ∞, nota-se que a
função T
(1 )τ− tende para uma reta constante igual a 1,
que multiplicada por RX(τ) dá como resultado o próprio
valor de RX(τ). Logo a integral anterior se transforma em:
2
X TTj2 f
X1G (f ) lim EX (f ) T
R ( ) e d=→∞
+∞ − π τ−∞
= τ τ∫
ou seja, GX(f) e RX(τ) formam um par de Fourier
X XR ( ) G (f )⇔τ ou seja:
Xj2 f
XG (f ) R ( ) e d
+∞ − π τ−∞
= τ τ∫

289
Xj2 f
XR ( ) G (f ) e df
+∞ π τ−∞
=τ ∫
Dessa forma, a definição de GX(f) como sendo dada pela
expressão X
2
TTEG (f ) 1lim X (f )
T
→∞= , está de acordo
com as definições feitas para o caso de sinais
determinísticos, onde GX(f) e RX(τ) formam um par de
Fourier.
A potência média total do sinal é calculada então
como:
X XP G (f )df R ( 0)∞
−∞= = τ=∫ Watts,
dissipado num resistor de 1 Ω.
Para dois processos x(t) e y(t) analogamente chega-se a:
T TXY ET
X (f )Y (f )G (f ) 1T
lim →∞
=
onde RXY(τ) e GXY(f) formam um par de Fourier,
XY XYR ( ) G (f )⇔τ
A correlação cruzada entre x(t) e y(t) é calculada como:

290
XYR ( ) x(t) y(t )p(x,y, )dxdy
+∞
−∞τ = +τ τ∫
Significado da autocorrelação
A autocorrelação de um sinal x(t) dá o grau de
dependência das amplitudes do sinal aleatório em instantes
distintos. Então é claro que, quando as amplitudes estão
muito afastadas (distantes na escala de tempo), elas serão
independentes, ou seja, não é possível nesse caso tentar
predizer uma amplitude dada a anterior. Essa
independência faz com que a autocorrelação para essa
distância entre as amplitudes seja igual ao quadrado do
valor médio (para processos estacionários), isto é,
X2
( )Rlim lim E[ x(t) x(t ) ] E[ x(t) ] E[ x(t ) ]
E[ x ] E[ x ] x
τ→∞ τ→∞=τ +τ = +τ =
= =
Se x = 0 então, lim R( ) x 0τ→∞ τ = =
Se o sinal varia lentamente ao longo do tempo, a
dependência entre as amplitudes terá um valor significativo
durante um longo tempo, isto é, para um valor de τ

291
relativamente grande; se o sinal varia rapidamente a
dependência será significante durante um curto espaço de
tempo ou seja, para um valor de τ relativamente pequeno.
Como a GX(f) e RX(τ) formam um par de Fourier, uma
determinada variação de τ implicará numa variação oposta
de f, ou seja, se RX(τ) for expandido na escala de τ, GX(f)
será comprimida na escala de freqüência (f); caso RX(τ) for
comprimido na escala de τ, GX(f) será expandida na escala
de freqüência, conforme mostrado na Figura 11.
RX(τ)
τ
0
f
GX(f)
0 fmax1
⇔
Figura: Sinal varia lentamente ⇒ valor de τ grande ⇒ freqüências baixas
RX(τ)
τ
0
f
GX(f)
0 fmax2
⇔
Figura 11 Sinal varia rapidamente ⇒ valor de τ pequeno ⇒ freqüências altas

292
Onde, nesse caso nas figuras temos fmax2 > fmax1
Outras definições:
Covariância cruzada - Kxy
É definida para processos estacionários como:
XYK E[x(t) x][y(t) y]= − −
Pode também ser escrita como:
XYXYK Ex(t) y(t ) x y R ( ) x y= − +τ − = τ −
onde RXY(τ) é a correlação cruzada entre x(t) e y(t).
Quando se trata do mesmo processo, isto é, y(t) = x(t),
chamamos de autocovariância: 2XXK R ( ) x = τ −
Processos ortogonais e processos independentes:
• Se KXY = 0, os processos x(t) e y(t) são ditos
descorrelatados;
• Se RXY = 0, os processos x(t) e y(t) são ditos
ortogonais;

293
• Os processos x(t) e y(t) são ditos independentes se a
função densidade conjunta de
' ' 'n n1 2 1 2x(t )x(t )...x(t )y(t )y(t )...y(t ) é o produto das
funções densidades conjuntas de n1 2x(t )x(t )...x(t ) e
de ' ' 'n1 2y(t )y(t )...y(t ) . Então se os processos são
independentes e estacionários, KXY = 0; porém o
contrário não se aplica, ou seja, se KXY = 0, não
implica que os processos sejam independentes.
Propriedades de RX(ττττ) e de GX(f)
1) Superposição:
Se pX
pzR (τ) = R (τ)∑ então,
pXp
zG (f) = G (f)∑
onde p pX XR ( ) G (f )⇔τ

294
pXp
zP = P∑ (Potência total é igual a soma das
potências individuais de cada sinal, pois os sinais são
no mínimo ortogonais, podendo ser independentes)
p p
+
X X-P = G (f ) df
∞
∞∫
2) Modulação:
Se x(t) é limidado em freqüência em B Hertz, e
y(t) = x(t) cos ( 2 π fc t + φ )
e sendo B < fc com φ uma variável aleatória
uniforme em (0, 2 π) independente do processo x(t),
tem-se: cY1
R (τ) = R(τ) cos( 2 π f τ)2
levando a: Y X X1 1 4 4c cG (f ) = G (f f ) G (f f )− ++
e como X cG (f f )− não intercepta em freqüência
X cG (f f )+ , tem-se também que
+
Y Y X-
1P = G (f ) df = P
2
∞
∞∫

295
3) Se dy(t) = x(t)dt
e ' 't
-z(t) = x(t ) dt
∞∫
então tem-se que:
2Y X G (f ) = (2 f) G (f )π
2X
ZG (f )
G (f ) = (2 f)π
4) RX(τ) é função par, ou seja: RX(τ) = RX(-τ)
5) RX(0) = 2x → valor médio quadrático de x(t)
6) Se z(t) = x(t) + y(t)
então RZ(τ) = RX(τ) + RY(τ) + RXY(τ) + RYX(τ)
7) Se x(t) tem uma componente periódica então RX(τ)
também será periódica de mesmo período, pois:
sendo x(t) = x(t + n T), com T o período e n
um inteiro qualquer, tem-se:
= = R( = x(t) x(t + ) x(t) x(t + + T) R( )) + Tτ ττ τ
8) 2
X R ( ) = xlim
τ → ∞τ → quadrado da componente
DC do sinal (x) se x(t) é estacionário.
Se o DC é zero, X R ( ) = 0lim
τ → ∞τ
9) X XR (0) R ( ) 0≥ τ τ≠

296
10) G(f) é função par G(f) = G(-f )
11) RXY(τ) = RYX(- τ)
12) 1/2
X Y XYR (0) R (0) R ( ) 0≥ τ τ≠
13) Se x(t) e y(t) são independentes,
RXY(τ) = RYX(τ) = x y
Observações para um sinal x(t) ergótico:
1. O valor médio do sinal x(t) , ou seja, x é a
componente DC do sinal
2. O quadrado do valor médio x é a potência DC
3. O valor médio quadrático de x(t) , ou seja, 2x é a
potência média total do sinal.
4. A variância do sinal x(t) , ou seja, 2X
22x - x
=σ
é a potência média AC do sinal.
5. O desvio padrão σX é a raiz quadrada do valor médio
quadrático (da potência média AC do sinal), ou seja, é
o valor rms do sinal x(t).

297

298

299

300

301

302

303

304

305

306

307

308

309

310

311

312

313

314

315

316

317

318

319

320

321

322

323

324

325

326

327

328

329

330

331

332

333

334

335

336

337

338

339

340

341

342

343

344

345

346

347

348

349

350

351

352

353

354

355

356

357

358

359

360

361
353

362

363
355

364

365