Embed Size (px)
Citation preview

Revista Brasileira de Ensino de Fısica, vol. 38, nº 2, e2311 (2016)www.scielo.br/rbefDOI: http://dx.doi.org/10.1590/1806-9126-RBEF-2015-0025
Artigos geraiscbnd
Licenca Creative Commons
A descricao do funcionamento de um motor Homopolarlinear e suas aplicacoes: Ilustrando o funcionamento
de um acelerador de partıculasThe description of the operation of a linear homopolar motor and applications: Illustrating the
operation of a linear particle accelerator
Adriano Doff∗1, Romeu M. Szmoski1
1Departamento Academico de Fısica, Universidade Tecnologica Federal do Parana, Ponta Grossa, PR, Brasil
Recebido em 15 de dezembro de 2015. Revisado em 6 de janeiro de 2016. Aceito em 17 de janeiro de 2016
Neste trabalho exploramos o potencial didatico de um motor homopolar linear com o objetivo de ilustraro princıpio de funcionamento de um acelerador de partıculas. A fim de estabelecer o mecanismo de funciona-mento de um motor homopolar linear, consideramos uma analogia com a descricao de um motor homopolarrotatorio, e partir deste apresentamos os princıpios de funcionamento deste dispositivo e estabelecemosum limite teorico para a velocidade do motor linear. De posse dos dados gerados experimentalmente paraa velocidade do elemento movel do motor, cujo o resultado esta em conformidade com o limite teoricoestabelecido, ilustramos o princıpio de funcionamento de um acelerador de partıculas linear (LINAC).Palavras-chave: Imas de neodımio, motor eletrico linear, tracker, acelerador de partıculas.
In this work we explored the didatic potential of a linear homopolar motor for the purpose of illustratingthe principle of operation of a particle accelerator. In order to establish the operating mechanism of alinear electric motor, we consider an analogy with the description of a rotary homopolar motor and fromthis we present the operating principles of this device and we establish a theoretical limit on the speed ofthe linear motor. Assuming experimental results for the speed of the movable element of the system, whoseresult is in accordance with the theoretical limit, we illustrate the operating principle of a linear particleaccelerator (LINAC).Keywords: Neodymium magnets, linear electric motor, tracker, particle accelerator.
1. Introducao
Motores sao dispositivos que convertem algumaforma de energia em energia mecanica. Especifi-camente os motores eletricos operam de modo atransformar a energia eletrica em energia cineticarotacional ou translacional. Motores eletricos cujoresultado e a energia cinetica rotacional sao de-nominados rotativos e sao os mais convencionais.Por outro lado, se a conversao resulta em energiamecanica sob a forma de movimento de translacao omotor e dito linear. Diante disso classificamos o dis-positivo proposto neste trabalho como motor linearhomopolar. O conceito homopolar e motivado pela
∗Endereco de correspondencia: [email protected].
descricao apresentada na Ref. [1] e maiores detalhessobre este motor sera apresentado na secao seguinte.
Popularmente conhecido na internet como “tremeletrico” ou “trem eletromagnetico”, o motor homo-polar linear e um dispositivo composto por imasde neodimio grudados nas extremidades de uma pi-lha e um conjunto de espiras construıdas com fiosde cobre desencapado que servem de trilho parao objeto se deslocar. Varios vıdeos demonstrandoeste dispositivo em movimento podem ser facilmenteencontrados na internet [2]. No entanto, ainda hapouco ou quase nenhum trabalho que explore demaneira teorica e didatica os mecanismos fısicos en-volvidos. Versoes consideradas mais simples foramminuciosamente investigadas por diferentes pesquisa-dores [1,3,4] e, recentemente Stephen Irons [5], apre-
Copyright by Sociedade Brasileira de Fısica. Printed in Brazil.
e2311-2 A descricao do funcionamento de um motor Homopolar linear e suas aplicacoes
sentou um trabalho especıfico sobre funcionamentodeste motor, no entanto, embora seja especıfico so-bre o motor linear sua descricao e ainda de cunhoqualitativa.
Neste trabalho propomos explorar o potencialdidatico do motor linear homopolar e descrever suadinamica subjacente. Para isso tomaremos comobase, principalmente, a Ref. [1] considerando o mo-tor linear como um analogo translacional de ummotor eletrico homopolar rotacional. Esta analogia,nos permitara delinear uma descricao detalhada dadinamica de operacao do motor bem como obter umaequacao para a velocidade do carrinho movel. Paratestar nossa proposta e previsao teorica determinare-mos tambem a velocidade a partir da analise e trata-mento dos vıdeos do dispositivo usando o programaTracker [6]. Por ultimo, como uma aplicacao da po-tencialidade deste dispositivo, ilustramos o princıpiode funcionamento de um acelerador de partıculas ,que consiste de um tema mais avancado e que podeser utilizado como um exemplo da aplicacao de co-nhecimentos elementares a descricao de sistemasfısicos mais complexos.
Devido a proposta didatica do trabalho este foidividido da seguinte forma: Na secao 2 apresentamosos conceitos basicos destinados a elaboracao de ummotor homopolar linear. Na secao 3 apresentamosos princıpios fısicos necessarios para a descricao domovimento do conjunto movel do motor linear e,
empregando uma analogia com o movimento do mo-tor homopolar, elaboramos uma descricao detalhadada dinamica de operacao do motor linear. Na secao4 apresentamos os resultados experimentais obti-dos para a descricao do conjunto movel do motorlinear proposto. Por fim, na secao 5, com base nadinamica do motor linear, ilustramos o princıpio defuncionamento de um acelerador de partıculas linear(LINAC), a secao 6 contem nossas conclusoes.
2. Elaboracao de um motor eletrico ho-mopolar linear
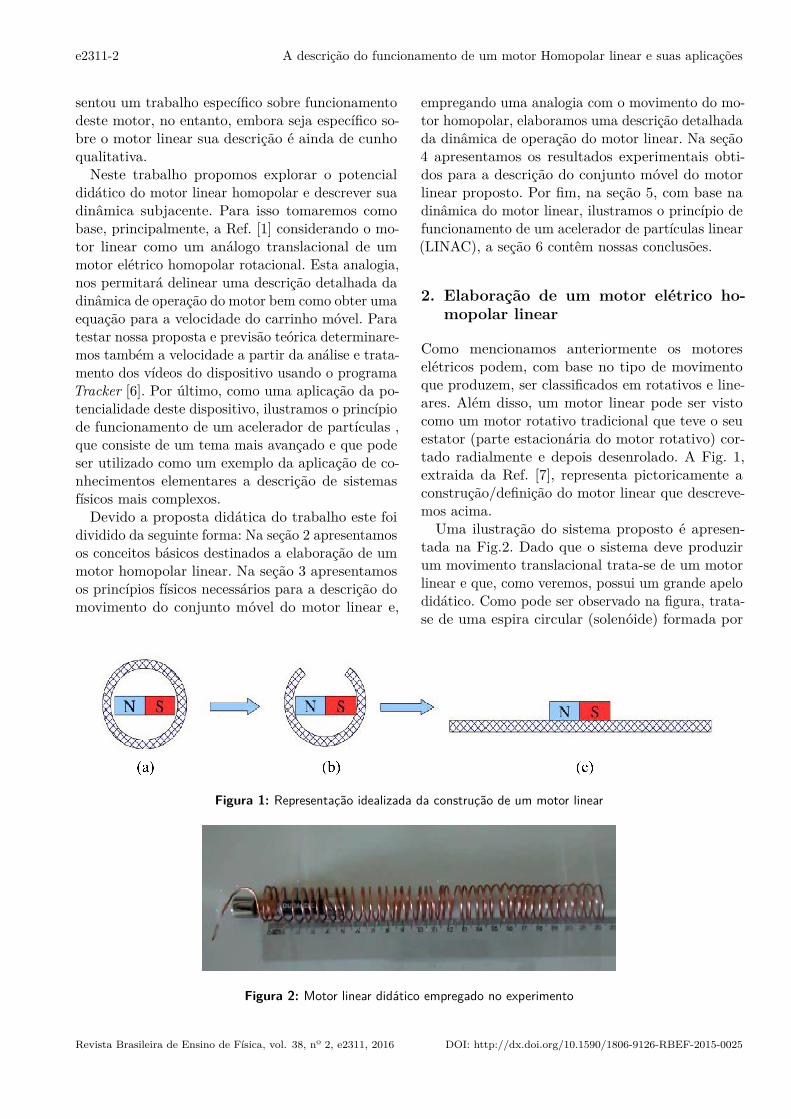
Como mencionamos anteriormente os motoreseletricos podem, com base no tipo de movimentoque produzem, ser classificados em rotativos e line-ares. Alem disso, um motor linear pode ser vistocomo um motor rotativo tradicional que teve o seuestator (parte estacionaria do motor rotativo) cor-tado radialmente e depois desenrolado. A Fig. 1,extraida da Ref. [7], representa pictoricamente aconstrucao/definicao do motor linear que descreve-mos acima.
Uma ilustracao do sistema proposto e apresen-tada na Fig.2. Dado que o sistema deve produzirum movimento translacional trata-se de um motorlinear e que, como veremos, possui um grande apelodidatico. Como pode ser observado na figura, trata-se de uma espira circular (solenoide) formada por
Figura 1: Representacao idealizada da construcao de um motor linear
Figura 2: Motor linear didatico empregado no experimento
Revista Brasileira de Ensino de Fısica, vol. 38, nº 2, e2311, 2016 DOI: http://dx.doi.org/10.1590/1806-9126-RBEF-2015-0025

Doff e Szmoski e2311-3
fio eletrico desencapado de d=2,5mm de diametro,uma pilha alcalina AAA e dois potentes imas deneodımio. O solenoide, como mencionamos anterior-mente, faz o papel de estator e, aqui, possui compri-mento L = 21, 5cm e diametro interno D = 2, 0cm.Na Fig.2 a pilha alcalina AAA (1,6V e 1600mmA.h)e acoplada a dois potentes imas de neodimio, osquais sao revestidos por um material condutor deforma que ao entrarem em contato com o interiordo solenoide estabelecem o fechamento do circuitoeletrico que corresponde a regiao do solenoide en-globada pelo conjunto (ima + pilha). O movimentoda pilha no interior do solenoide e analogo ao mo-vimento de um motor homopolar usual (rotatorio)para o movimento de translacao, sendo uma con-sequencia direta da interacao do campo do ima como campo estabelecido na regiao do solenoide de-limitado pelo conjunto (ima + pilha)[ilha onde ocomportamento de ~Bsol e nao-uniforme], apos serestabelecido a corrente gerada pela pilha. Conformecomentamos na secao introdutoria o motor conside-rado neste trabalho tem a finalidade de ilustrar oprincıpio fundamental de funcionamento de um ace-lerador de partıculas, tema que sera desenvolvido nasecao 5. Antes disso, nas secoes subsequentes, iremosdescrever a dinamica de funcionamento do motor eapresentar os resultados obtidos para o movimentodescrito pelo do motor linear proposto.
3. Princıpios fısicos e caracterizacao domovimento do motor linear
O princıpio basico em que os motores eletro-magneticos sao baseados reside no fato que quandoum fio condutor, imerso em uma regiao de campomagnetico perpendicular ao eixo de percurso dacorrente, experimenta uma forca dada por
~F = I
∮d~l × ~B (1)
onde I e a corrente que atravessa o fio, ~B representao campo magnetico local atuante sobre o fio e d~l umelemento de comprimento. Em um motor eletricousual (rotatorio) o rotor gira pois os fios e o campomagnetico sao arranjados de forma que ocorra umtorque sobre a linha central do rotor. Conformecomentamos na secao anterior, o motor eletrico li-near considerado pode ser visto como o analogotranslacional de um motor eletrico homopolar usual,como o ”roller”homopolar descrito na Ref. [1]. A
apresentacao do princıpio de funcionamento de ummotor homopolar esta muito bem apresentada nareferencia indicada, em particular, o roller descritonesta referencia ira fornecer a base para a descricaoda dinamica do motor linear considerado . Um pontofundamental para a descricao da dinamica do motorhomopolar consiste na observacao que os imas, naforma de cilindro que formam o roller, ao girar criamuma forca eletromotriz
|ε(ω)| = 12Br
2ω, (2)
devido ao fluxo magnetico criado em consequenciada rotacao. Esta (fem) induzida, por sua vez, iracriar uma corrente contraria a corrente fornecidapela pilha a fim de conservar a energia, levandoportando a
I = Vpilha −Br2ω
R(3)
onde Vpilha ∼ 1, 6V , R e a resistencia do circuito querepresenta o motor e B o campo magnetico criadopor cada ima. De posse desta informacao, chega-se,como em [1] a seguinte equacao de movimento paraa componente tangencial vt do ”roller”homopolar
dvt(t)dt
= Br3
I
(Vpilha −Brvt
R
)− aµdyn (4)
sendo I o momento de Inercia do sistema (imas +pilha), a = 4r2
3IN = 100m/s2 e µdyn o coeficiente
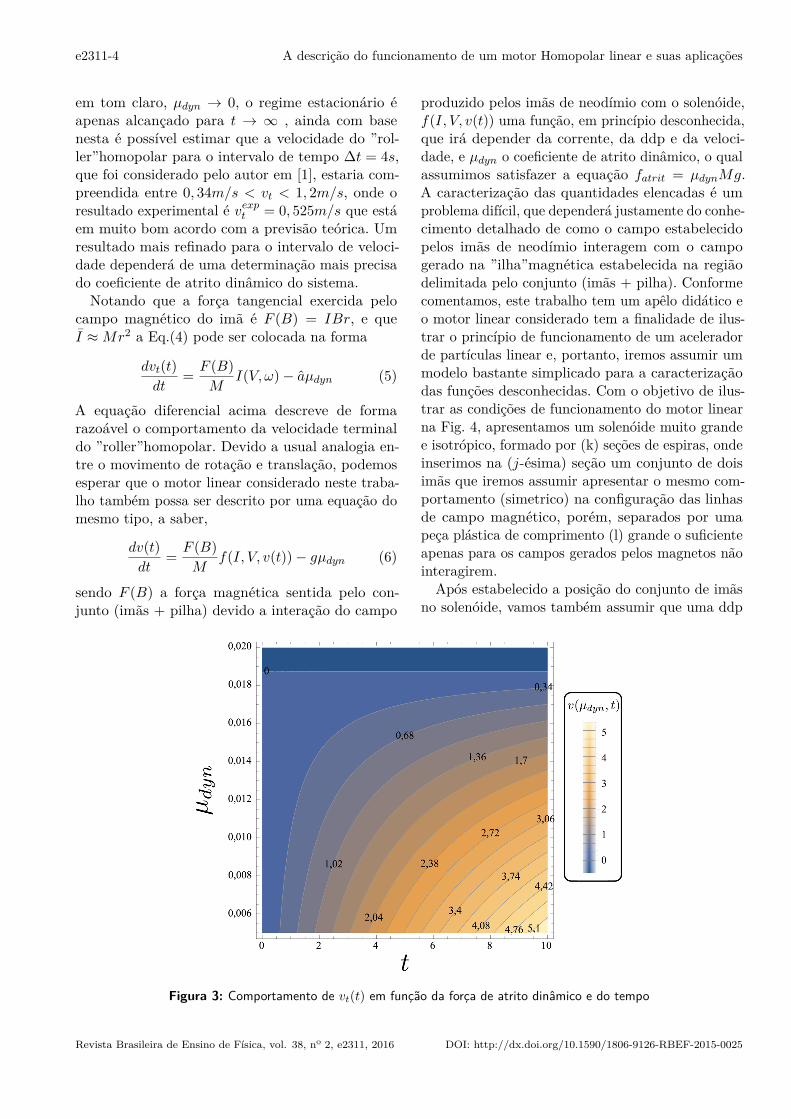
de atrito dinamico do conjunto com a superficie emque o ”roller”gira e v = ωr. Na Fig. 3 apresenta-mos a solucao numerica da Eq.(4), em funcao davariacao do coeficiente atrito dinamico (eixo y) e otempo (eixo x). Esta figura reflete bem o compor-tamento observado para variacao da componentetangencial da velocidade de rotacao do ”roller”emfuncao de um intervalo assumido para o coefici-ente de atrito dinamico. Dado que, apos um certointervalo de tempo o motor entra no regime esta-cionario (vt = constante), fato este garantido pelacondicao a → 0, um ponto que deve ser exclare-cido nesta figura e que esta descreve a regiao fısicade parametros, representada por cores de tom azulclaro a escuro no canto superior esquerdo, corres-pondente a 0, 012 < µdyn < 0, 019, uma vez queneste intervalo as curvas que representam a veloci-dade tangencial tendem a atingir a condicao quase-estacionaria para um intervalo de tempo compatıvelcom o observado para este tipo de motor, o que naoocorre para outra regiao do grafico. Para as cores
DOI: http://dx.doi.org/10.1590/1806-9126-RBEF-2015-0025 Revista Brasileira de Ensino de Fısica, vol. 38, nº 2, e2311, 2016
e2311-4 A descricao do funcionamento de um motor Homopolar linear e suas aplicacoes
em tom claro, µdyn → 0, o regime estacionario eapenas alcancado para t → ∞ , ainda com basenesta e possıvel estimar que a velocidade do ”rol-ler”homopolar para o intervalo de tempo ∆t = 4s,que foi considerado pelo autor em [1], estaria com-preendida entre 0, 34m/s < vt < 1, 2m/s, onde oresultado experimental e vexp
t = 0, 525m/s que estaem muito bom acordo com a previsao teorica. Umresultado mais refinado para o intervalo de veloci-dade dependera de uma determinacao mais precisado coeficiente de atrito dinamico do sistema.
Notando que a forca tangencial exercida pelocampo magnetico do ima e F (B) = IBr, e queI ≈Mr2 a Eq.(4) pode ser colocada na forma
dvt(t)dt
= F (B)M
I(V, ω)− aµdyn (5)
A equacao diferencial acima descreve de formarazoavel o comportamento da velocidade terminaldo ”roller”homopolar. Devido a usual analogia en-tre o movimento de rotacao e translacao, podemosesperar que o motor linear considerado neste traba-lho tambem possa ser descrito por uma equacao domesmo tipo, a saber,
dv(t)dt
= F (B)M
f(I, V, v(t))− gµdyn (6)
sendo F (B) a forca magnetica sentida pelo con-junto (imas + pilha) devido a interacao do campo
produzido pelos imas de neodımio com o solenoide,f(I, V, v(t)) uma funcao, em princıpio desconhecida,que ira depender da corrente, da ddp e da veloci-dade, e µdyn o coeficiente de atrito dinamico, o qualassumimos satisfazer a equacao fatrit = µdynMg.A caracterizacao das quantidades elencadas e umproblema difıcil, que dependera justamente do conhe-cimento detalhado de como o campo estabelecidopelos imas de neodımio interagem com o campogerado na ”ilha”magnetica estabelecida na regiaodelimitada pelo conjunto (imas + pilha). Conformecomentamos, este trabalho tem um apelo didatico eo motor linear considerado tem a finalidade de ilus-trar o princıpio de funcionamento de um aceleradorde partıculas linear e, portanto, iremos assumir ummodelo bastante simplicado para a caracterizacaodas funcoes desconhecidas. Com o objetivo de ilus-trar as condicoes de funcionamento do motor linearna Fig. 4, apresentamos um solenoide muito grandee isotropico, formado por (k) secoes de espiras, ondeinserimos na (j-esima) secao um conjunto de doisimas que iremos assumir apresentar o mesmo com-portamento (simetrico) na configuracao das linhasde campo magnetico, porem, separados por umapeca plastica de comprimento (l) grande o suficienteapenas para os campos gerados pelos magnetos naointeragirem.
Apos estabelecido a posicao do conjunto de imasno solenoide, vamos tambem assumir que uma ddp
Figura 3: Comportamento de vt(t) em funcao da forca de atrito dinamico e do tempo
Revista Brasileira de Ensino de Fısica, vol. 38, nº 2, e2311, 2016 DOI: http://dx.doi.org/10.1590/1806-9126-RBEF-2015-0025

Doff e Szmoski e2311-5
Figura 4: Ilustracao esquematica do mecanismo de operacao do motor homopolar linear
seja aplicada de forma a configurar uma corrente(I) no solenoide, cuja a orientacao esta indicada narespectiva figura. O campo magnetico gerado no in-terior do solenoide ( ~B) e orientado na direcao (+i) eas linhas pontilhadas (....) nos extremos representamque este se estende por longas distancias, e as linhaspontilhadas intermediarias representam as secoes((j + 1), (j − 1)) que foram retiradas apenas paraproporcionar a vizualizacao dos magnetos. Nestecaso o campo magnetico estabelecido no interiordo solenoide e uniforme ( ou seja e o mesmo) emqualquer secao (j − k, j + k) e descrito por
~B = µ0nIi, (7)
onde n = NL , N o numero total de espiras e µ0 a per-
meabilidade magnetica do vacuo. O ima na posicao(j+1) sente uma forca (−i ~Fj) devido a espira posici-onada em (j), a uniformidade do campo magneticono solenoide implica que a forca associada a secao(j+2) em modulo e igual a
∣∣∣~Fj
∣∣∣, porem, de orientacaocontraria ~Fj+2 = +i ~Fj que leva a uma forca resul-tante nula sobre o magneto (~Fj+1,R = ~Fj+~Fj+2 = 0).O problema e simetrico em relacao a secao (j), deforma que a forca resultante sobre o magneto situ-ado na secao (j − 1) tambem e nula e o conjuntode magnetos fica em repouso. Entretanto, vamosconsiderar agora uma segunda situacao, onde a pecaplastica que conecta os magnetos e substituida poruma pilha AAA cuja a orientacao de seus polos levea uma corrente (I) de mesmo sentido representadona Fig. 4, a diferenca e que neste caso apenas aespira contida na secao (j) apresentara um campomagnetico, por isso o comentario apresentado nasecao anterior a respeito da regiao delimitada peloconjunto (imas+pilha) se comportando como uma”ilha”onde o comportamento de ~Bsol e nao uniforme,neste caso podemos dizer que a simetria observadaanteriormente, (~Fj+k,R = ~Fj−k,R = 0) , nao seramais respeitada ja que o campo no centro da secao(j) do solenoide nao sera o mesmo das extremidades,
ou seja ~Bc > ~Be. Em consequencia desta nao - uni-formidade do campo magnetico nas secoes de espirae que movimento do motor eletrico linear tem inıcio ese propaga na direcao (−i), uma outra forma de che-gar a este resultado seria empregando o princıpio daconservacao da energia, uma vez que variacao da den-sidade de energia magnetica no meio implica na se-guinte forca sobre cada magneto, ~F = −~∇Um, paraum campo uniforme ~∇Um = 0 os magnetos perma-nencem em repouso, porem, para a segunda situacaoconsiderada ganhamos ~∇Um 6= 0 e que caracteriza omovimento dos magnetos. Como comentamos a ca-racterizacao das funcoes descritas pela Eq.(6) e umproblema difıcil, que dependera justamente do co-nhecimento detalhado de como o campo estabelecidopelos imas interage com o gerado na ”ilha”magnetica.Um modelo simplificado para o comportamento de~Bc e ~Be pode ser obtido a partir da Ref. [8]. Nestaos autores descrevem o comportamento da forcaproduzida por um solenoide sobre um nucleo de fer-rite movel que, apos ser magnetizado, apresenta umcampo ~Bferr = kµ0i. Uma vez que para materiaisferromagneticos a permeabilidade relativa (k >> 1),podendo estar na faixa (102 < k < 107) [9] pode-mos considerar que o campo magnetico gerado porum ima de neodimio possa ser representado porB = kµ0, ja que para k = 105 terıamos, por exem-plo, O(B) ∼ 105.4π.10−7T ∼ O(1000)G ∼ O(0, 1)T .Com base nessa observacao podemos esperar quea forca atuante sobre cada magneto devido ao so-lenoide nas posicoes central (c) e extremo (e), secao(j) da Fig. 4, possa ser representada por
~Fc(B) = 12BN2I2S
(L2 +D2)(−i) (8)
~Fe(B) = 18BN2I2S
(L2 + D2
4 )(−i), (9)
onde N representa o numero de espiras na secao, De o diametro, L o comprimento da secao, S = πD2
4e a area de secao tranversal do solenoide e B o
DOI: http://dx.doi.org/10.1590/1806-9126-RBEF-2015-0025 Revista Brasileira de Ensino de Fısica, vol. 38, nº 2, e2311, 2016
e2311-6 A descricao do funcionamento de um motor Homopolar linear e suas aplicacoes
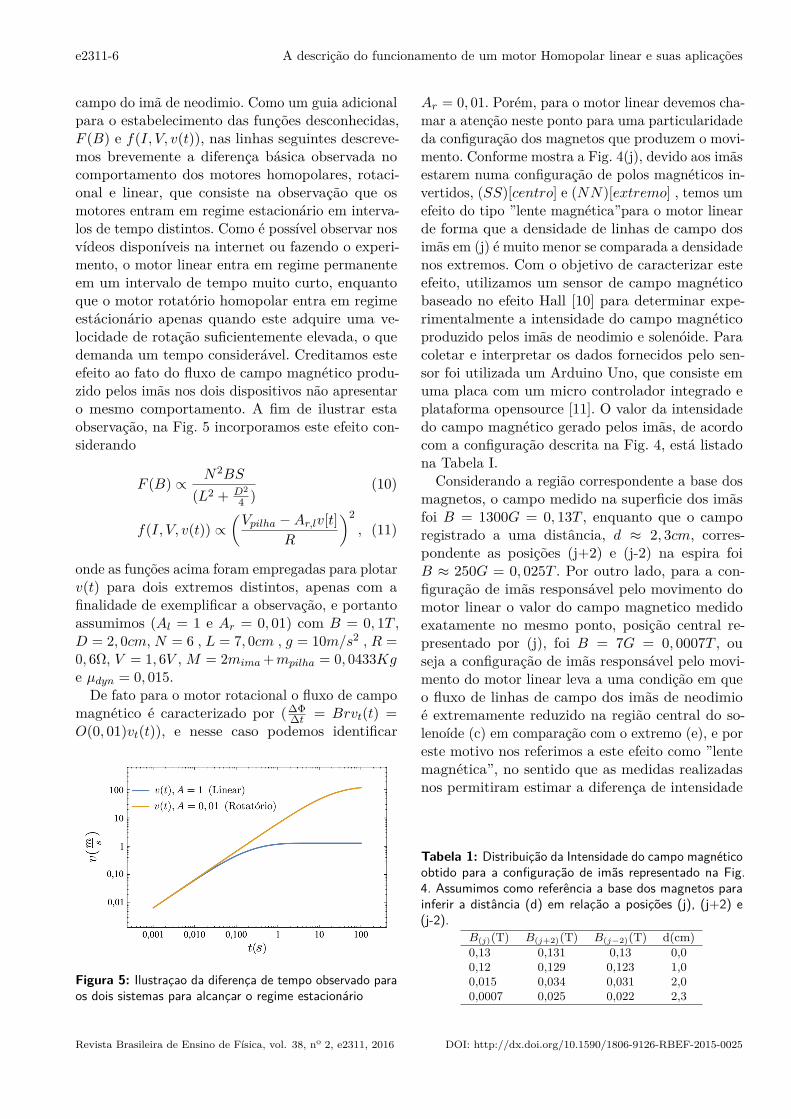
campo do ima de neodimio. Como um guia adicionalpara o estabelecimento das funcoes desconhecidas,F (B) e f(I, V, v(t)), nas linhas seguintes descreve-mos brevemente a diferenca basica observada nocomportamento dos motores homopolares, rotaci-onal e linear, que consiste na observacao que osmotores entram em regime estacionario em interva-los de tempo distintos. Como e possıvel observar nosvıdeos disponıveis na internet ou fazendo o experi-mento, o motor linear entra em regime permanenteem um intervalo de tempo muito curto, enquantoque o motor rotatorio homopolar entra em regimeestacionario apenas quando este adquire uma ve-locidade de rotacao suficientemente elevada, o quedemanda um tempo consideravel. Creditamos esteefeito ao fato do fluxo de campo magnetico produ-zido pelos imas nos dois dispositivos nao apresentaro mesmo comportamento. A fim de ilustrar estaobservacao, na Fig. 5 incorporamos este efeito con-siderando
F (B) ∝ N2BS
(L2 + D2
4 )(10)
f(I, V, v(t)) ∝(Vpilha −Ar,lv[t]
R
)2, (11)
onde as funcoes acima foram empregadas para plotarv(t) para dois extremos distintos, apenas com afinalidade de exemplificar a observacao, e portantoassumimos (Al = 1 e Ar = 0, 01) com B = 0, 1T ,D = 2, 0cm, N = 6 , L = 7, 0cm , g = 10m/s2 , R =0, 6Ω, V = 1, 6V , M = 2mima +mpilha = 0, 0433Kge µdyn = 0, 015.
De fato para o motor rotacional o fluxo de campomagnetico e caracterizado por (∆Φ
∆t = Brvt(t) =O(0, 01)vt(t)), e nesse caso podemos identificar
Figura 5: Ilustracao da diferenca de tempo observado paraos dois sistemas para alcancar o regime estacionario
Ar = 0, 01. Porem, para o motor linear devemos cha-mar a atencao neste ponto para uma particularidadeda configuracao dos magnetos que produzem o movi-mento. Conforme mostra a Fig. 4(j), devido aos imasestarem numa configuracao de polos magneticos in-vertidos, (SS)[centro] e (NN)[extremo] , temos umefeito do tipo ”lente magnetica”para o motor linearde forma que a densidade de linhas de campo dosimas em (j) e muito menor se comparada a densidadenos extremos. Com o objetivo de caracterizar esteefeito, utilizamos um sensor de campo magneticobaseado no efeito Hall [10] para determinar expe-rimentalmente a intensidade do campo magneticoproduzido pelos imas de neodimio e solenoide. Paracoletar e interpretar os dados fornecidos pelo sen-sor foi utilizada um Arduino Uno, que consiste emuma placa com um micro controlador integrado eplataforma opensource [11]. O valor da intensidadedo campo magnetico gerado pelos imas, de acordocom a configuracao descrita na Fig. 4, esta listadona Tabela I.
Considerando a regiao correspondente a base dosmagnetos, o campo medido na superficie dos imasfoi B = 1300G = 0, 13T , enquanto que o camporegistrado a uma distancia, d ≈ 2, 3cm, corres-pondente as posicoes (j+2) e (j-2) na espira foiB ≈ 250G = 0, 025T . Por outro lado, para a con-figuracao de imas responsavel pelo movimento domotor linear o valor do campo magnetico medidoexatamente no mesmo ponto, posicao central re-presentado por (j), foi B = 7G = 0, 0007T , ouseja a configuracao de imas responsavel pelo movi-mento do motor linear leva a uma condicao em queo fluxo de linhas de campo dos imas de neodimioe extremamente reduzido na regiao central do so-lenoıde (c) em comparacao com o extremo (e), e poreste motivo nos referimos a este efeito como ”lentemagnetica”, no sentido que as medidas realizadasnos permitiram estimar a diferenca de intensidade
Tabela 1: Distribuicao da Intensidade do campo magneticoobtido para a configuracao de imas representado na Fig.4. Assumimos como referencia a base dos magnetos parainferir a distancia (d) em relacao a posicoes (j), (j+2) e(j-2).
B(j)(T) B(j+2)(T) B(j−2)(T) d(cm)0,13 0,131 0,13 0,00,12 0,129 0,123 1,00,015 0,034 0,031 2,00,0007 0,025 0,022 2,3
Revista Brasileira de Ensino de Fısica, vol. 38, nº 2, e2311, 2016 DOI: http://dx.doi.org/10.1590/1806-9126-RBEF-2015-0025
Doff e Szmoski e2311-7
de campo entre estas regioes como sendo da ordemde (∆B ≈ B(j±2)(G) − B(j)(G) ≈ O(250)G), deforma que podemos inferir a ordem de grandezapara a diferenca de fluxo observada entre os doismotores. Finalmente, considerando toda discussaoapresentada e possıvel simular a dinamica do motorlinear considerando
F (B) ≈ 14
N2BS
(L2 +D2) (12)
f(I, V, v(t)) ≈(Vpilha −Alv[t]
R
)2, (13)
uma vez que na posicao central do solenoide, B ∼0, 0007T e Fc(B) << Fe(B). Devido a constacao quepara o motor linear o efeito ”lente magnetica”levaentre os extremos do magneto (∆B ≈ 250G) e aobservacao que os motores entram em regime es-tacionario em intervalos de tempo bem distintos(tl << tr), por reescala entre o fator de fluxo docaso rotacional, comparado ao linear, esperamosAl ≈ O(102)Ar(vide Fig. 5). Esta foi apenas umaestimativa, baseada na diferenca de comportamentoobservada para as duas versoes de motores homo-polares e na determinacao de (∆B) observado parao motor linear. De acordo com o comentario ja te-cido no inıcio da secao seria preciso a realizacao deum estudo muito mais detalhado para a descricaoda dinamica e que fugiria do escopo deste traba-
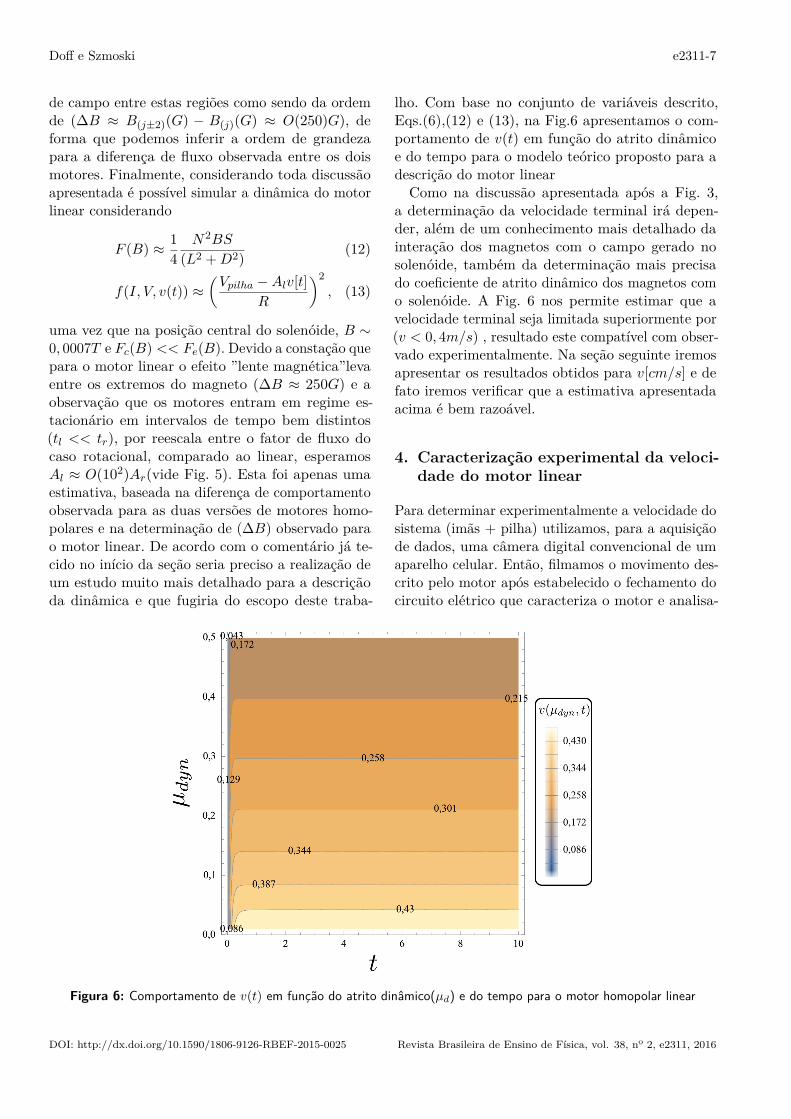
lho. Com base no conjunto de variaveis descrito,Eqs.(6),(12) e (13), na Fig.6 apresentamos o com-portamento de v(t) em funcao do atrito dinamicoe do tempo para o modelo teorico proposto para adescricao do motor linear
Como na discussao apresentada apos a Fig. 3,a determinacao da velocidade terminal ira depen-der, alem de um conhecimento mais detalhado dainteracao dos magnetos com o campo gerado nosolenoide, tambem da determinacao mais precisado coeficiente de atrito dinamico dos magnetos como solenoide. A Fig. 6 nos permite estimar que avelocidade terminal seja limitada superiormente por(v < 0, 4m/s) , resultado este compatıvel com obser-vado experimentalmente. Na secao seguinte iremosapresentar os resultados obtidos para v[cm/s] e defato iremos verificar que a estimativa apresentadaacima e bem razoavel.
4. Caracterizacao experimental da veloci-dade do motor linear
Para determinar experimentalmente a velocidade dosistema (imas + pilha) utilizamos, para a aquisicaode dados, uma camera digital convencional de umaparelho celular. Entao, filmamos o movimento des-crito pelo motor apos estabelecido o fechamento docircuito eletrico que caracteriza o motor e analisa-
Figura 6: Comportamento de v(t) em funcao do atrito dinamico(µd) e do tempo para o motor homopolar linear
DOI: http://dx.doi.org/10.1590/1806-9126-RBEF-2015-0025 Revista Brasileira de Ensino de Fısica, vol. 38, nº 2, e2311, 2016
e2311-8 A descricao do funcionamento de um motor Homopolar linear e suas aplicacoes
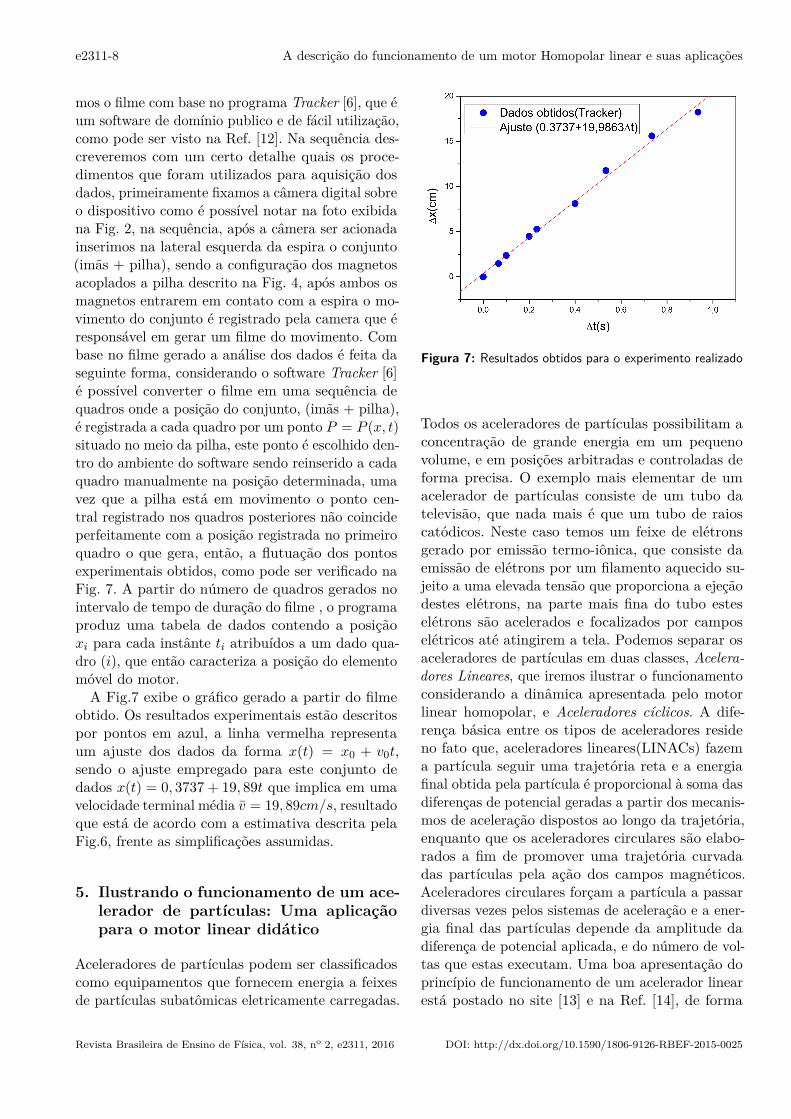
mos o filme com base no programa Tracker [6], que eum software de domınio publico e de facil utilizacao,como pode ser visto na Ref. [12]. Na sequencia des-creveremos com um certo detalhe quais os proce-dimentos que foram utilizados para aquisicao dosdados, primeiramente fixamos a camera digital sobreo dispositivo como e possıvel notar na foto exibidana Fig. 2, na sequencia, apos a camera ser acionadainserimos na lateral esquerda da espira o conjunto(imas + pilha), sendo a configuracao dos magnetosacoplados a pilha descrito na Fig. 4, apos ambos osmagnetos entrarem em contato com a espira o mo-vimento do conjunto e registrado pela camera que eresponsavel em gerar um filme do movimento. Combase no filme gerado a analise dos dados e feita daseguinte forma, considerando o software Tracker [6]e possıvel converter o filme em uma sequencia dequadros onde a posicao do conjunto, (imas + pilha),e registrada a cada quadro por um ponto P = P (x, t)situado no meio da pilha, este ponto e escolhido den-tro do ambiente do software sendo reinserido a cadaquadro manualmente na posicao determinada, umavez que a pilha esta em movimento o ponto cen-tral registrado nos quadros posteriores nao coincideperfeitamente com a posicao registrada no primeiroquadro o que gera, entao, a flutuacao dos pontosexperimentais obtidos, como pode ser verificado naFig. 7. A partir do numero de quadros gerados nointervalo de tempo de duracao do filme , o programaproduz uma tabela de dados contendo a posicaoxi para cada instante ti atribuıdos a um dado qua-dro (i), que entao caracteriza a posicao do elementomovel do motor.
A Fig.7 exibe o grafico gerado a partir do filmeobtido. Os resultados experimentais estao descritospor pontos em azul, a linha vermelha representaum ajuste dos dados da forma x(t) = x0 + v0t,sendo o ajuste empregado para este conjunto dedados x(t) = 0, 3737 + 19, 89t que implica em umavelocidade terminal media v = 19, 89cm/s, resultadoque esta de acordo com a estimativa descrita pelaFig.6, frente as simplificacoes assumidas.
5. Ilustrando o funcionamento de um ace-lerador de partıculas: Uma aplicacaopara o motor linear didatico
Aceleradores de partıculas podem ser classificadoscomo equipamentos que fornecem energia a feixesde partıculas subatomicas eletricamente carregadas.
Figura 7: Resultados obtidos para o experimento realizado
Todos os aceleradores de partıculas possibilitam aconcentracao de grande energia em um pequenovolume, e em posicoes arbitradas e controladas deforma precisa. O exemplo mais elementar de umacelerador de partıculas consiste de um tubo datelevisao, que nada mais e que um tubo de raioscatodicos. Neste caso temos um feixe de eletronsgerado por emissao termo-ionica, que consiste daemissao de eletrons por um filamento aquecido su-jeito a uma elevada tensao que proporciona a ejecaodestes eletrons, na parte mais fina do tubo esteseletrons sao acelerados e focalizados por camposeletricos ate atingirem a tela. Podemos separar osaceleradores de partıculas em duas classes, Acelera-dores Lineares, que iremos ilustrar o funcionamentoconsiderando a dinamica apresentada pelo motorlinear homopolar, e Aceleradores cıclicos. A dife-renca basica entre os tipos de aceleradores resideno fato que, aceleradores lineares(LINACs) fazema partıcula seguir uma trajetoria reta e a energiafinal obtida pela partıcula e proporcional a soma dasdiferencas de potencial geradas a partir dos mecanis-mos de aceleracao dispostos ao longo da trajetoria,enquanto que os aceleradores circulares sao elabo-rados a fim de promover uma trajetoria curvadadas partıculas pela acao dos campos magneticos.Aceleradores circulares forcam a partıcula a passardiversas vezes pelos sistemas de aceleracao e a ener-gia final das partıculas depende da amplitude dadiferenca de potencial aplicada, e do numero de vol-tas que estas executam. Uma boa apresentacao doprincıpio de funcionamento de um acelerador linearesta postado no site [13] e na Ref. [14], de forma
Revista Brasileira de Ensino de Fısica, vol. 38, nº 2, e2311, 2016 DOI: http://dx.doi.org/10.1590/1806-9126-RBEF-2015-0025
Doff e Szmoski e2311-9
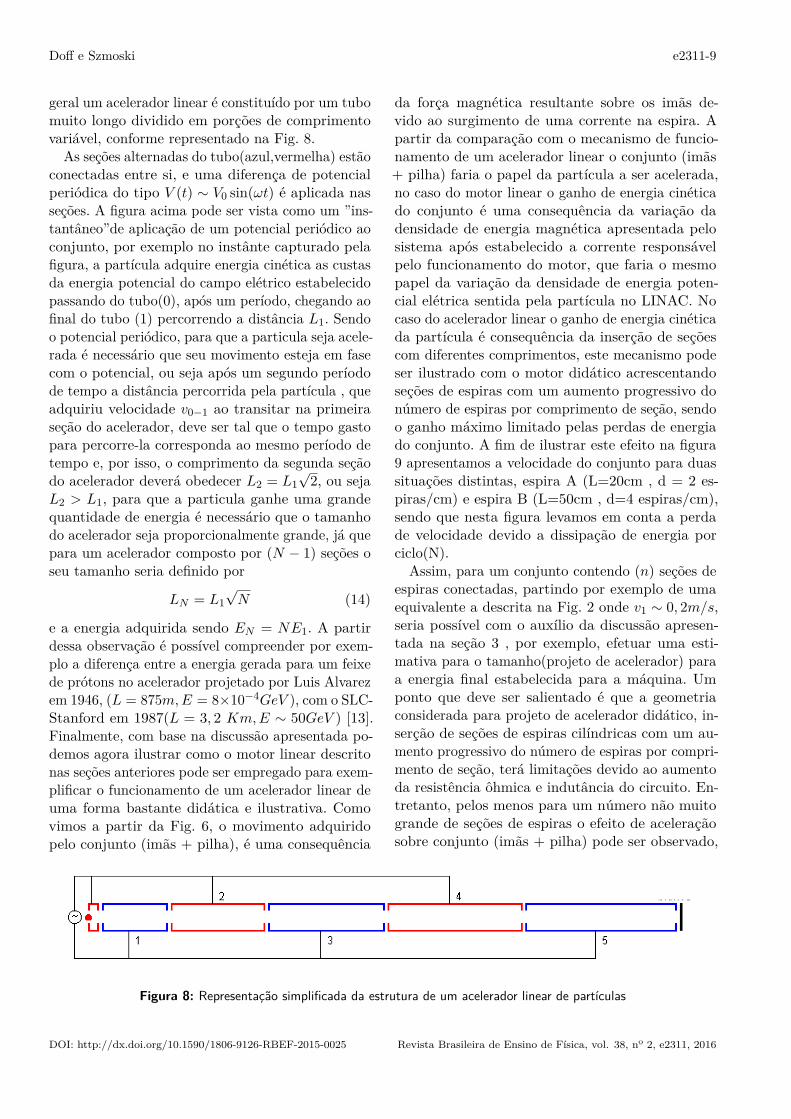
geral um acelerador linear e constituıdo por um tubomuito longo dividido em porcoes de comprimentovariavel, conforme representado na Fig. 8.
As secoes alternadas do tubo(azul,vermelha) estaoconectadas entre si, e uma diferenca de potencialperiodica do tipo V (t) ∼ V0 sin(ωt) e aplicada nassecoes. A figura acima pode ser vista como um ”ins-tantaneo”de aplicacao de um potencial periodico aoconjunto, por exemplo no instante capturado pelafigura, a partıcula adquire energia cinetica as custasda energia potencial do campo eletrico estabelecidopassando do tubo(0), apos um perıodo, chegando aofinal do tubo (1) percorrendo a distancia L1. Sendoo potencial periodico, para que a particula seja acele-rada e necessario que seu movimento esteja em fasecom o potencial, ou seja apos um segundo perıodode tempo a distancia percorrida pela partıcula , queadquiriu velocidade v0−1 ao transitar na primeirasecao do acelerador, deve ser tal que o tempo gastopara percorre-la corresponda ao mesmo perıodo detempo e, por isso, o comprimento da segunda secaodo acelerador devera obedecer L2 = L1
√2, ou seja
L2 > L1, para que a particula ganhe uma grandequantidade de energia e necessario que o tamanhodo acelerador seja proporcionalmente grande, ja quepara um acelerador composto por (N − 1) secoes oseu tamanho seria definido por
LN = L1√N (14)
e a energia adquirida sendo EN = NE1. A partirdessa observacao e possıvel compreender por exem-plo a diferenca entre a energia gerada para um feixede protons no acelerador projetado por Luis Alvarezem 1946, (L = 875m,E = 8×10−4GeV ), com o SLC-Stanford em 1987(L = 3, 2 Km,E ∼ 50GeV ) [13].Finalmente, com base na discussao apresentada po-demos agora ilustrar como o motor linear descritonas secoes anteriores pode ser empregado para exem-plificar o funcionamento de um acelerador linear deuma forma bastante didatica e ilustrativa. Comovimos a partir da Fig. 6, o movimento adquiridopelo conjunto (imas + pilha), e uma consequencia
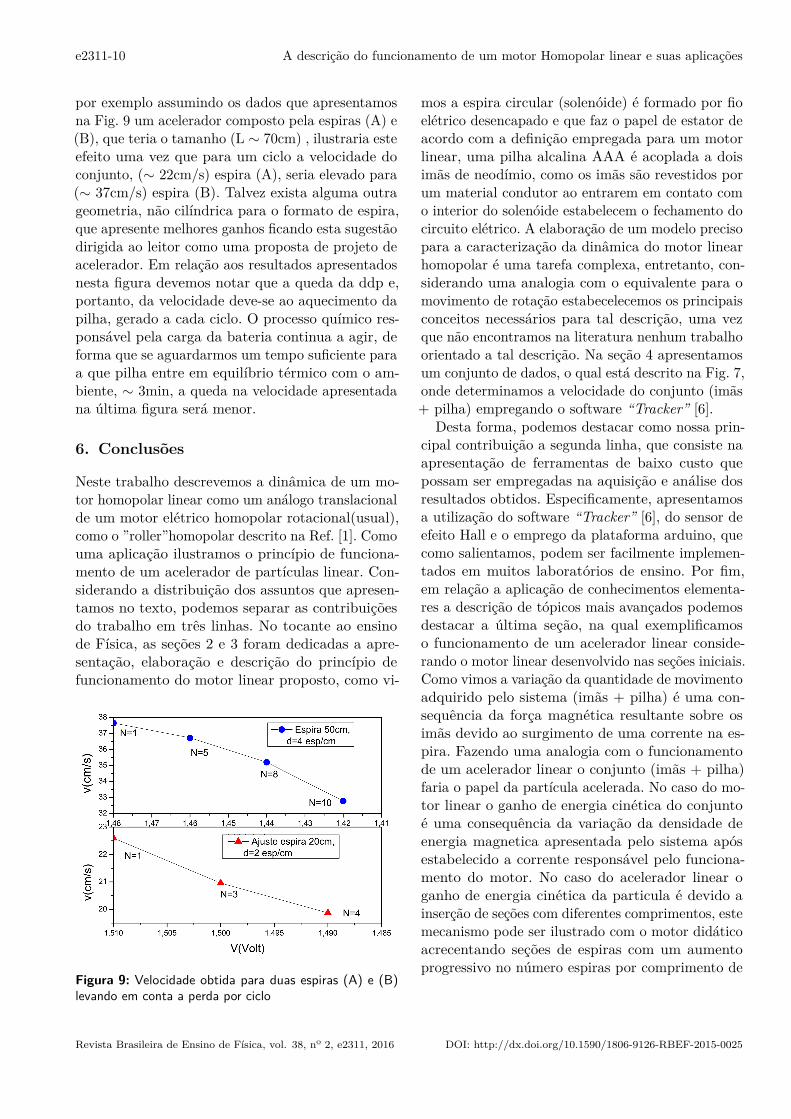
da forca magnetica resultante sobre os imas de-vido ao surgimento de uma corrente na espira. Apartir da comparacao com o mecanismo de funcio-namento de um acelerador linear o conjunto (imas+ pilha) faria o papel da partıcula a ser acelerada,no caso do motor linear o ganho de energia cineticado conjunto e uma consequencia da variacao dadensidade de energia magnetica apresentada pelosistema apos estabelecido a corrente responsavelpelo funcionamento do motor, que faria o mesmopapel da variacao da densidade de energia poten-cial eletrica sentida pela partıcula no LINAC. Nocaso do acelerador linear o ganho de energia cineticada partıcula e consequencia da insercao de secoescom diferentes comprimentos, este mecanismo podeser ilustrado com o motor didatico acrescentandosecoes de espiras com um aumento progressivo donumero de espiras por comprimento de secao, sendoo ganho maximo limitado pelas perdas de energiado conjunto. A fim de ilustrar este efeito na figura9 apresentamos a velocidade do conjunto para duassituacoes distintas, espira A (L=20cm , d = 2 es-piras/cm) e espira B (L=50cm , d=4 espiras/cm),sendo que nesta figura levamos em conta a perdade velocidade devido a dissipacao de energia porciclo(N).
Assim, para um conjunto contendo (n) secoes deespiras conectadas, partindo por exemplo de umaequivalente a descrita na Fig. 2 onde v1 ∼ 0, 2m/s,seria possıvel com o auxılio da discussao apresen-tada na secao 3 , por exemplo, efetuar uma esti-mativa para o tamanho(projeto de acelerador) paraa energia final estabelecida para a maquina. Umponto que deve ser salientado e que a geometriaconsiderada para projeto de acelerador didatico, in-sercao de secoes de espiras cilındricas com um au-mento progressivo do numero de espiras por compri-mento de secao, tera limitacoes devido ao aumentoda resistencia ohmica e indutancia do circuito. En-tretanto, pelos menos para um numero nao muitogrande de secoes de espiras o efeito de aceleracaosobre conjunto (imas + pilha) pode ser observado,
Figura 8: Representacao simplificada da estrutura de um acelerador linear de partıculas
DOI: http://dx.doi.org/10.1590/1806-9126-RBEF-2015-0025 Revista Brasileira de Ensino de Fısica, vol. 38, nº 2, e2311, 2016
e2311-10 A descricao do funcionamento de um motor Homopolar linear e suas aplicacoes
por exemplo assumindo os dados que apresentamosna Fig. 9 um acelerador composto pela espiras (A) e(B), que teria o tamanho (L ∼ 70cm) , ilustraria esteefeito uma vez que para um ciclo a velocidade doconjunto, (∼ 22cm/s) espira (A), seria elevado para(∼ 37cm/s) espira (B). Talvez exista alguma outrageometria, nao cilındrica para o formato de espira,que apresente melhores ganhos ficando esta sugestaodirigida ao leitor como uma proposta de projeto deacelerador. Em relacao aos resultados apresentadosnesta figura devemos notar que a queda da ddp e,portanto, da velocidade deve-se ao aquecimento dapilha, gerado a cada ciclo. O processo quımico res-ponsavel pela carga da bateria continua a agir, deforma que se aguardarmos um tempo suficiente paraa que pilha entre em equilıbrio termico com o am-biente, ∼ 3min, a queda na velocidade apresentadana ultima figura sera menor.
6. Conclusoes
Neste trabalho descrevemos a dinamica de um mo-tor homopolar linear como um analogo translacionalde um motor eletrico homopolar rotacional(usual),como o ”roller”homopolar descrito na Ref. [1]. Comouma aplicacao ilustramos o princıpio de funciona-mento de um acelerador de partıculas linear. Con-siderando a distribuicao dos assuntos que apresen-tamos no texto, podemos separar as contribuicoesdo trabalho em tres linhas. No tocante ao ensinode Fısica, as secoes 2 e 3 foram dedicadas a apre-sentacao, elaboracao e descricao do princıpio defuncionamento do motor linear proposto, como vi-
Figura 9: Velocidade obtida para duas espiras (A) e (B)levando em conta a perda por ciclo
mos a espira circular (solenoide) e formado por fioeletrico desencapado e que faz o papel de estator deacordo com a definicao empregada para um motorlinear, uma pilha alcalina AAA e acoplada a doisimas de neodımio, como os imas sao revestidos porum material condutor ao entrarem em contato como interior do solenoide estabelecem o fechamento docircuito eletrico. A elaboracao de um modelo precisopara a caracterizacao da dinamica do motor linearhomopolar e uma tarefa complexa, entretanto, con-siderando uma analogia com o equivalente para omovimento de rotacao estabecelecemos os principaisconceitos necessarios para tal descricao, uma vezque nao encontramos na literatura nenhum trabalhoorientado a tal descricao. Na secao 4 apresentamosum conjunto de dados, o qual esta descrito na Fig. 7,onde determinamos a velocidade do conjunto (imas+ pilha) empregando o software “Tracker” [6].
Desta forma, podemos destacar como nossa prin-cipal contribuicao a segunda linha, que consiste naapresentacao de ferramentas de baixo custo quepossam ser empregadas na aquisicao e analise dosresultados obtidos. Especificamente, apresentamosa utilizacao do software “Tracker” [6], do sensor deefeito Hall e o emprego da plataforma arduino, quecomo salientamos, podem ser facilmente implemen-tados em muitos laboratorios de ensino. Por fim,em relacao a aplicacao de conhecimentos elementa-res a descricao de topicos mais avancados podemosdestacar a ultima secao, na qual exemplificamoso funcionamento de um acelerador linear conside-rando o motor linear desenvolvido nas secoes iniciais.Como vimos a variacao da quantidade de movimentoadquirido pelo sistema (imas + pilha) e uma con-sequencia da forca magnetica resultante sobre osimas devido ao surgimento de uma corrente na es-pira. Fazendo uma analogia com o funcionamentode um acelerador linear o conjunto (imas + pilha)faria o papel da partıcula acelerada. No caso do mo-tor linear o ganho de energia cinetica do conjuntoe uma consequencia da variacao da densidade deenergia magnetica apresentada pelo sistema aposestabelecido a corrente responsavel pelo funciona-mento do motor. No caso do acelerador linear oganho de energia cinetica da particula e devido ainsercao de secoes com diferentes comprimentos, estemecanismo pode ser ilustrado com o motor didaticoacrecentando secoes de espiras com um aumentoprogressivo no numero espiras por comprimento de
Revista Brasileira de Ensino de Fısica, vol. 38, nº 2, e2311, 2016 DOI: http://dx.doi.org/10.1590/1806-9126-RBEF-2015-0025

Doff e Szmoski e2311-11
secao, claro levando em conta a limitacao devido asperdas de energia devido a dissipacao.
Agradecimentos
O autor A. Doff agradece ao Conselho Nacional deDesenvolvimento Cientıfico e Tecnologico (CNPq)pelo apoio financeiro.
Referencias
[1] Sean M. Stewart, Revista Brasileira de Ensino deFısica 11, 275 (2007).
[2] https://www.youtube.com/watch?v=25XRekx4WLA;http://www.videoman.gr/pt/74359.
[3] Christopher J. Chiaverina, The Physics Teacher 42,553 (2004).
[4] Davi Featonby, Physics Education 41, 292 (2006).[5] Stephen Irons, The Physics Teacher 53, 186 (2015).[6] Douglas Brown, Tracker: Free Video Analysis and
Modeling Tool for Physics Education, disponıvel emhttp://www.cabrillo.edu/˜dbrown/tracker.
[7] Hugo Sakai Idagawa, Projeto, Montagem e Caracte-rizacao de Motor Linear de Ima Permanente. Tra-balho de Graduacao II, Unicamp, 2009.
[8] Milton Antonio Zaro, Rosa Leamar Dias Blanco eCarlos Alberto Kern Thomas, Revista Brasileira deEnsino de Fısica 11, 88 (1989).
[9] Magmattec: Solutions in Magnetic Materials,disponıvel em http://www.magmattec.com/products.html.
[10] Continuous-Time Ratiometric Linear Hall EffectSensor ICs (Alegro MicroSystems), disponıvel emhttp://www.allegromicro.com/en/Products/Magnetic-Linear-And-Angular-Position-Sensor-ICs/Linear-Position-Sensor-ICs/A1301-2.aspx.
[11] Arduino Playground HomePage, disponıvel emhttp://www.arduino.cc.
[12] Adriano Doff, Jalves S. Figueira e Jean C. Gentilini,Revista Brasileira de Ensino de Fısica 33, 1305(2011).
[13] Wikipedia contributors, Particle Accelerator, dis-ponıvel em https://en.wikipedia.org/wiki/Particle-accelerator.
[14] Rui Alvez Pires e Rui Dilao, Gaz. Phys. 15, 56(1992).
DOI: http://dx.doi.org/10.1590/1806-9126-RBEF-2015-0025 Revista Brasileira de Ensino de Fısica, vol. 38, nº 2, e2311, 2016





























