Embed Size (px)
DESCRIPTION
Análise de Resposta Transitória e de Regime Estacionário 5.3. Sistemas de Segunda Ordem. Prof. André Marcato. Livro Texto : Engenharia de Controle Moderno – Quarta Edição – Editora Pearson Prentice Hall – Autor: Katsuhiko OGATA. Exemplo de Realimentação. Exemplo de Realimentação. - PowerPoint PPT Presentation
Citation preview
1
Análise de Resposta Transitória e deRegime Estacionário
5.3. Sistemas de Segunda Ordem
Prof. André Marcato
Livro Texto: Engenharia de Controle Moderno – Quarta Edição – Editora Pearson Prentice Hall – Autor: Katsuhiko OGATA
Apresentação 10
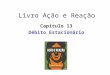
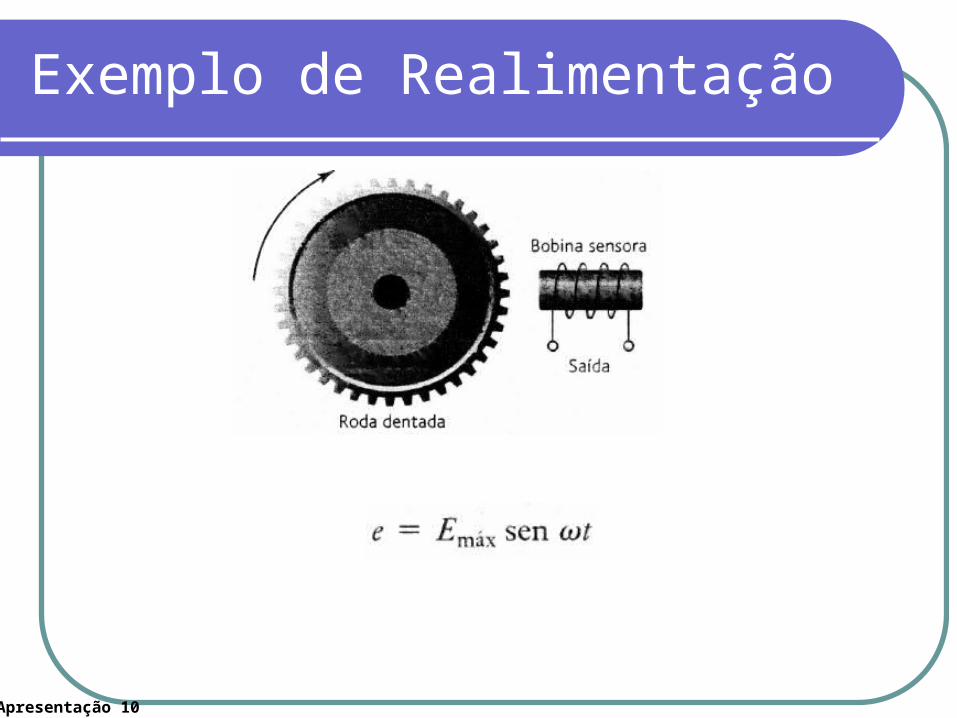
Exemplo de Realimentação
Apresentação 10
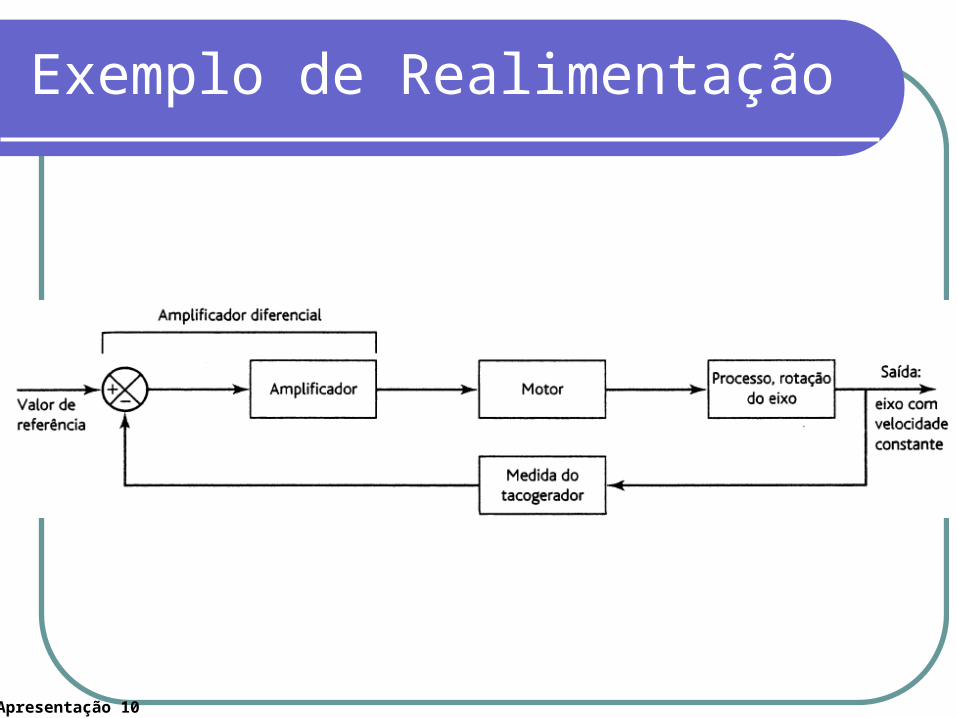
Exemplo de Realimentação
Apresentação 10
Exemplo de Realimentação
Apresentação 10
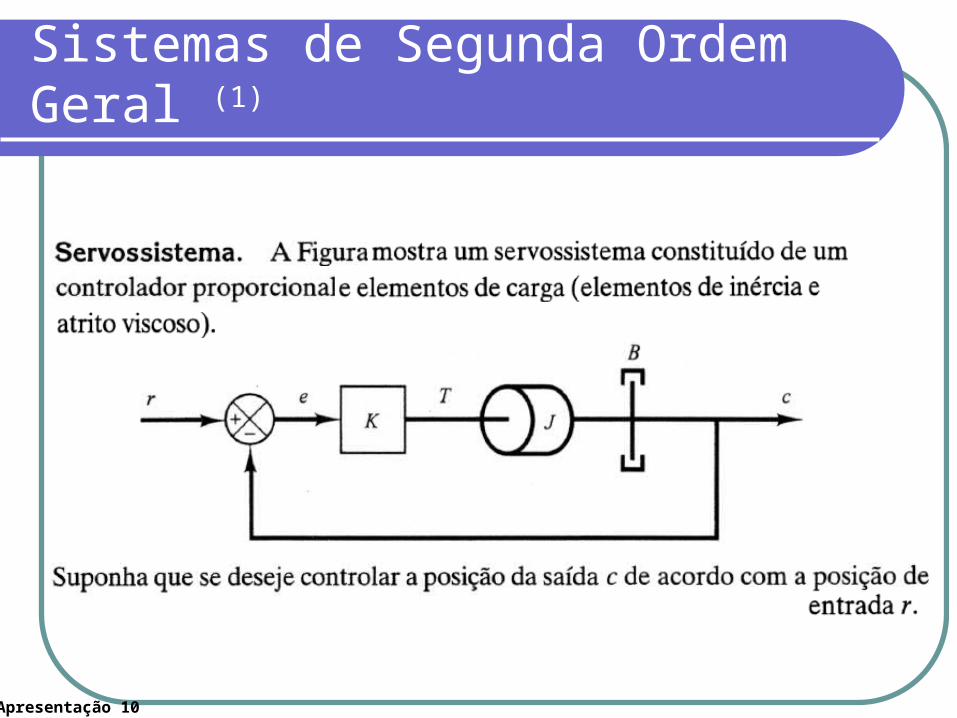
Sistemas de Segunda Ordem Geral (1)
Apresentação 10
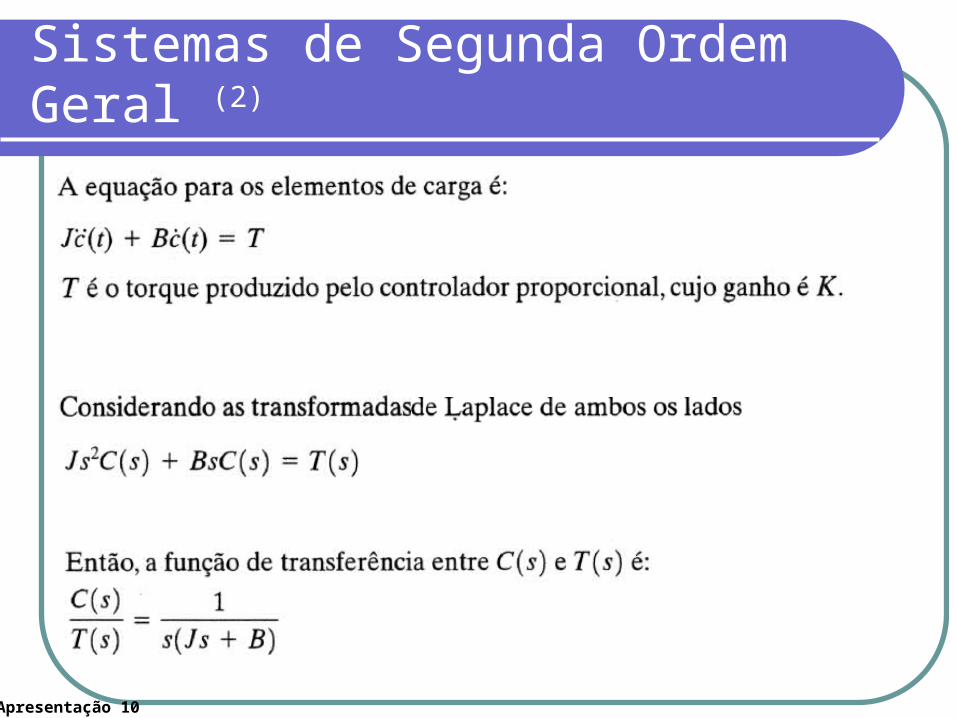
Sistemas de Segunda Ordem Geral (2)
Apresentação 10
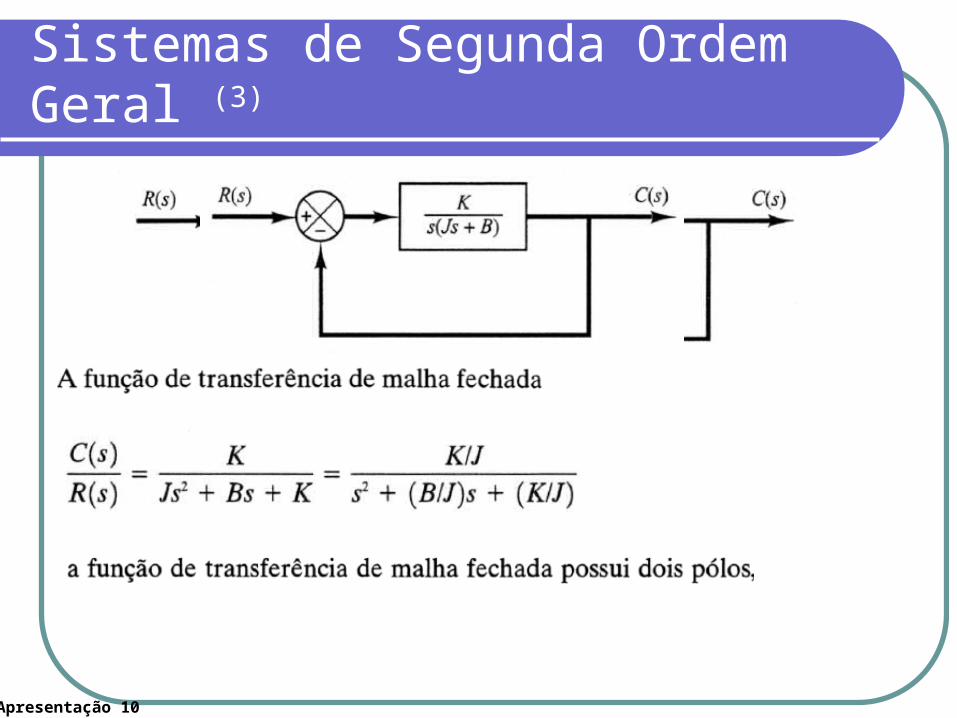
Sistemas de Segunda Ordem Geral (3)
Apresentação 10
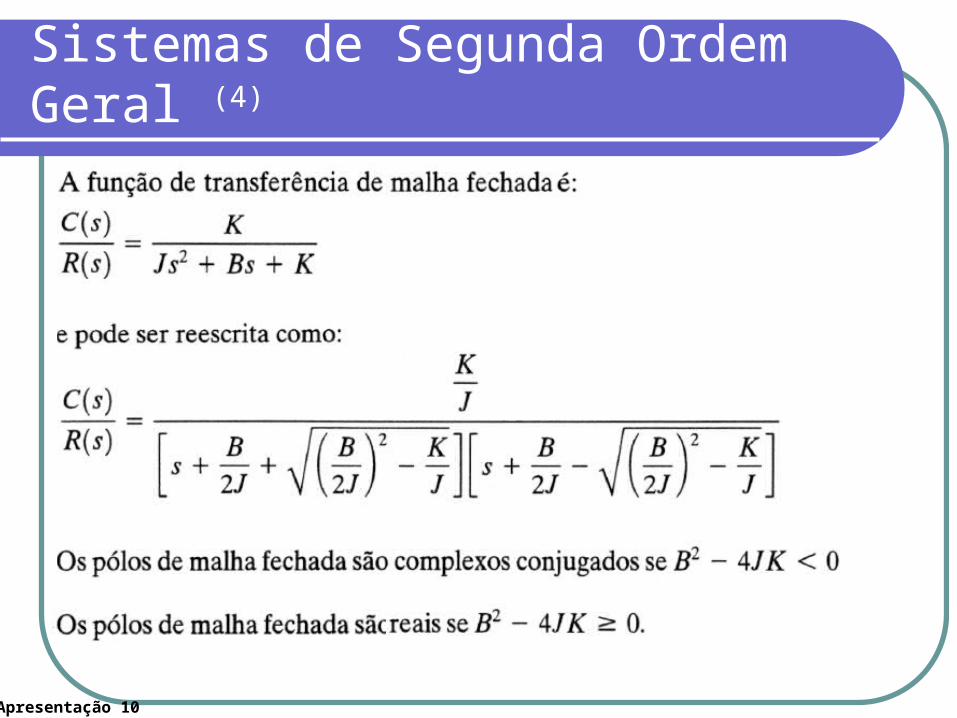
Sistemas de Segunda Ordem Geral (4)
Apresentação 10
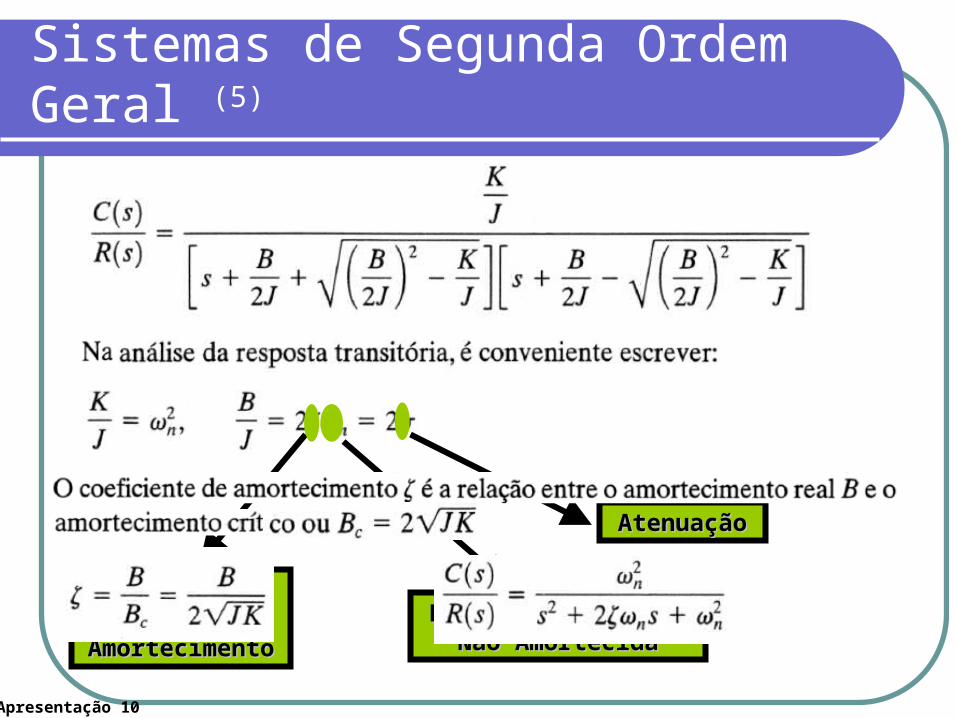
Sistemas de Segunda Ordem Geral (5)
AtenuaçãoAtenuação
Freqüência Natural Não Freqüência Natural Não AmortecidaAmortecida
Coeficiente de Coeficiente de AmortecimentoAmortecimento
Apresentação 10
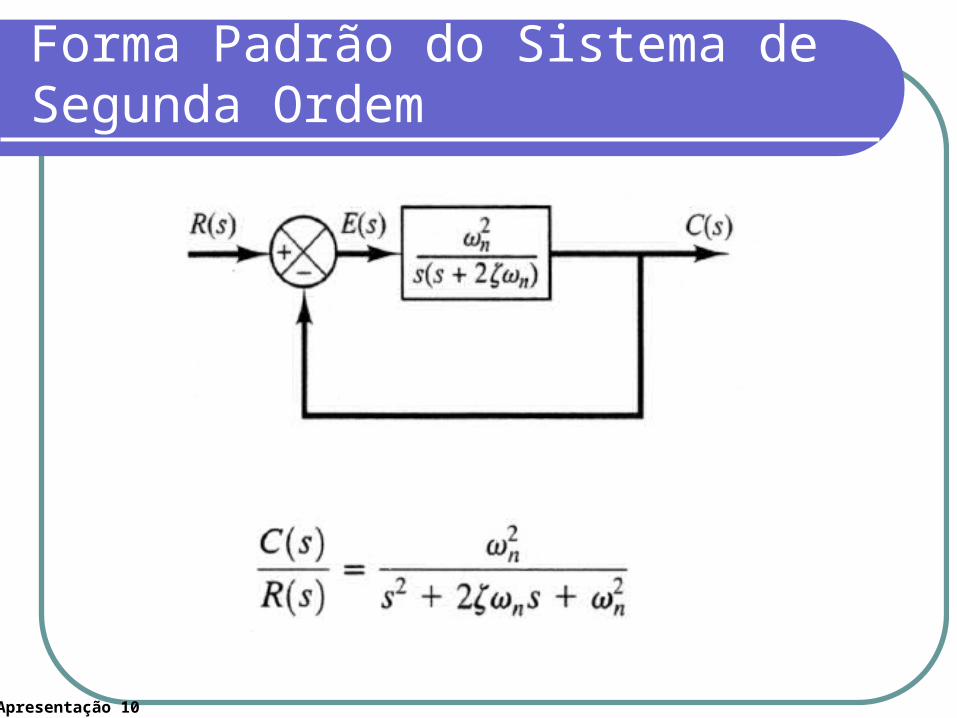
Forma Padrão do Sistema de Segunda Ordem
Apresentação 10
Freqüência Natural, ωn
A freqüência natural de um sistema de segunda A freqüência natural de um sistema de segunda ordem é a freqüência de oscilação do sistema ordem é a freqüência de oscilação do sistema sem amortecimento. sem amortecimento.
Por exemplo, a freqüência de oscilação de um Por exemplo, a freqüência de oscilação de um circuito RLC em série sem a resitênci será igual circuito RLC em série sem a resitênci será igual à freqüência natural.à freqüência natural.
Apresentação 10
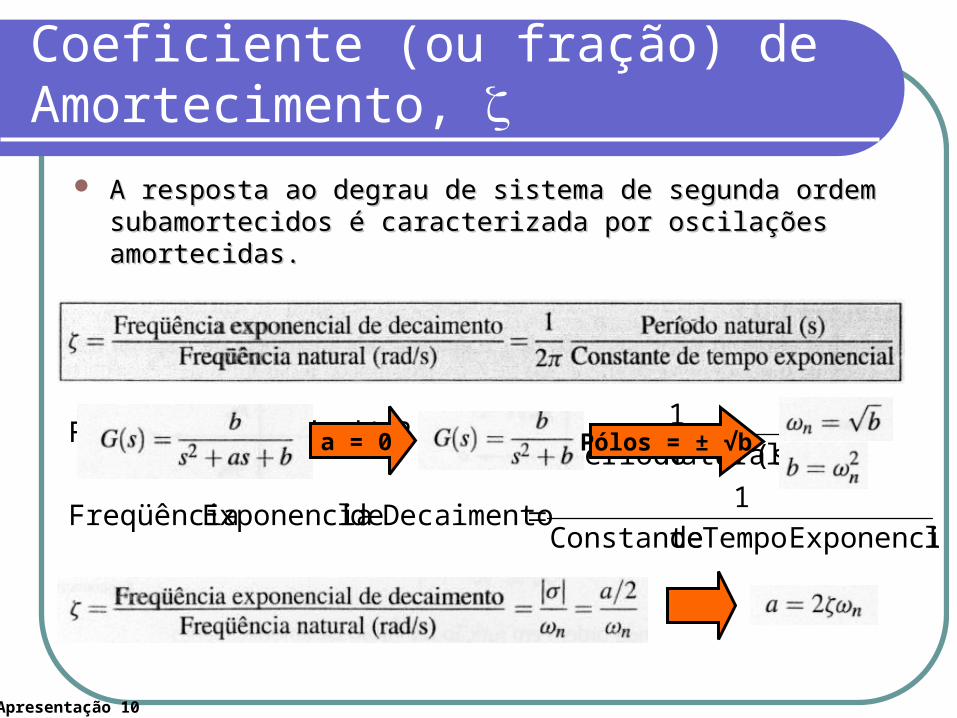
Coeficiente (ou fração) de Amortecimento,
A resposta ao degrau de sistema de segunda ordem A resposta ao degrau de sistema de segunda ordem subamortecidos é caracterizada por oscilações subamortecidos é caracterizada por oscilações amortecidas.amortecidas.
lExponencia Tempo de Constante
1 Decaimento de lExponencia Freqüência
(s) Natural Período
122 (rad/s) Natural Freqüência
fa = 0 Pólos = ± √b
Apresentação 10
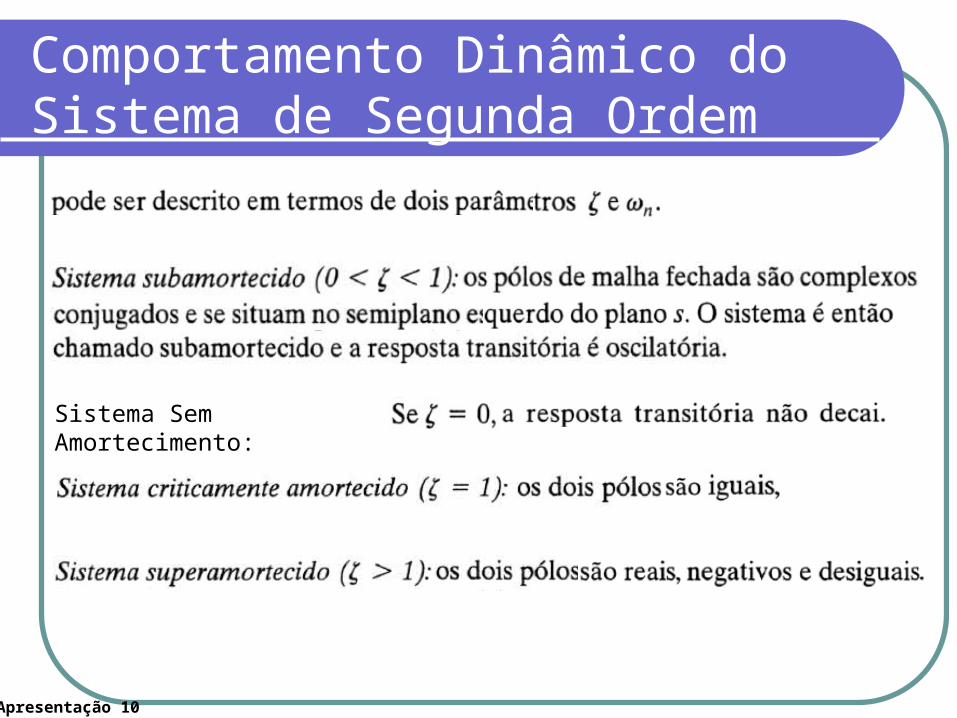
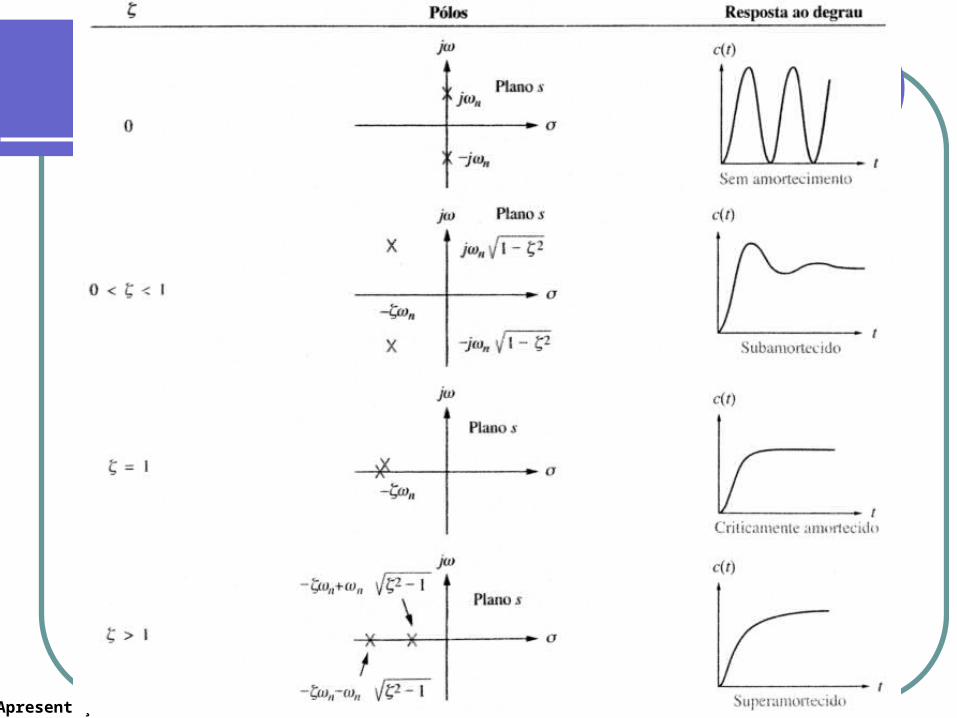
Comportamento Dinâmico do Sistema de Segunda Ordem
Sistema Sem Amortecimento:
Apresentação 10
Apresentação 10
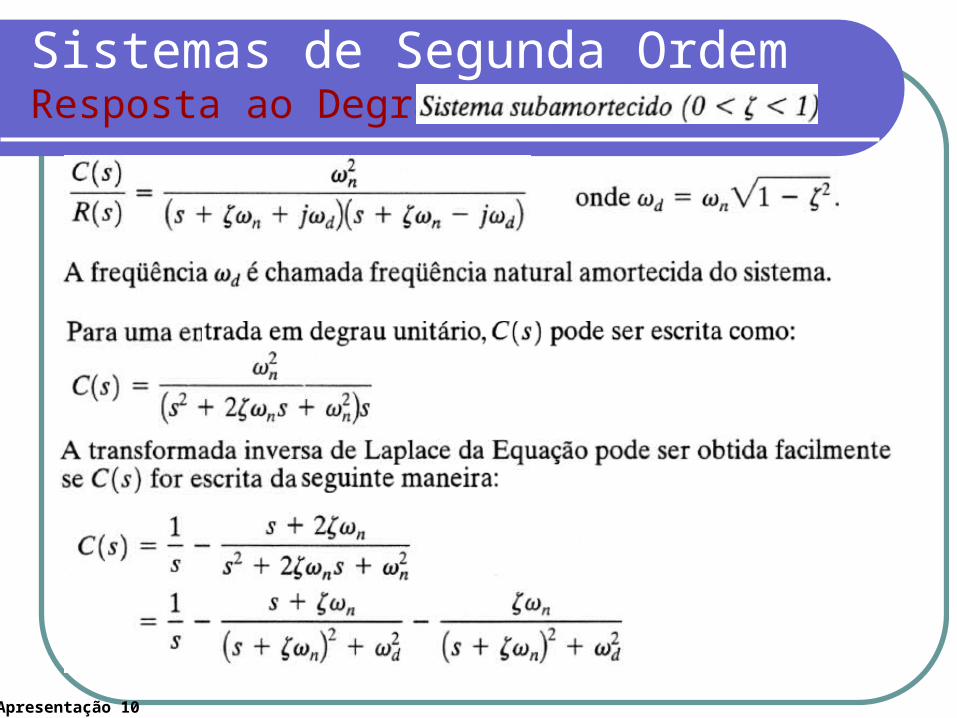
Sistemas de Segunda OrdemResposta ao Degrau
Apresentação 10
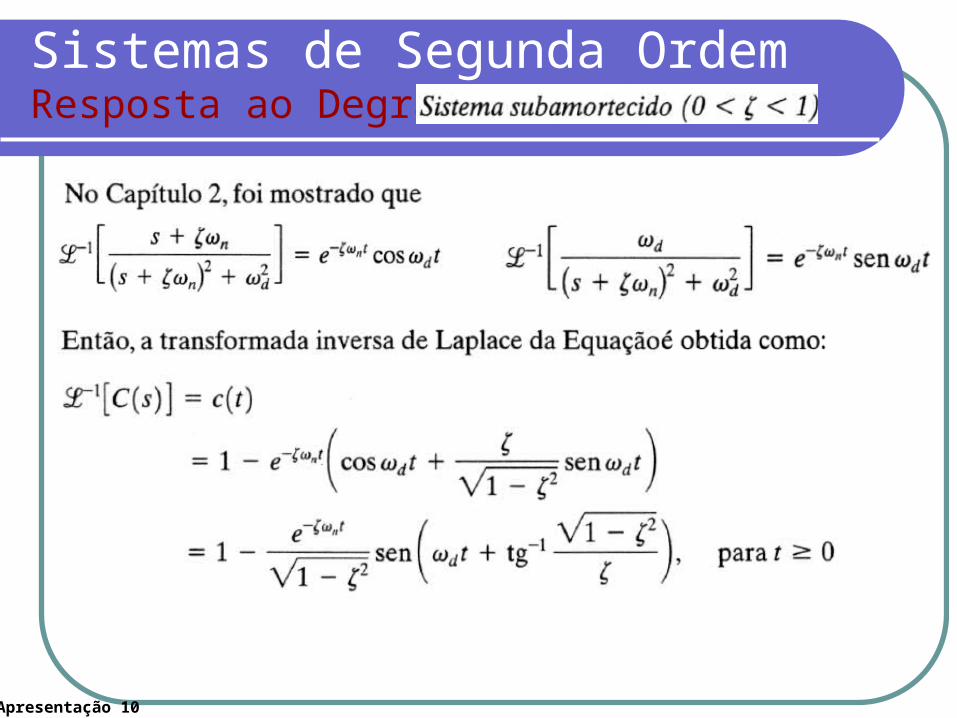
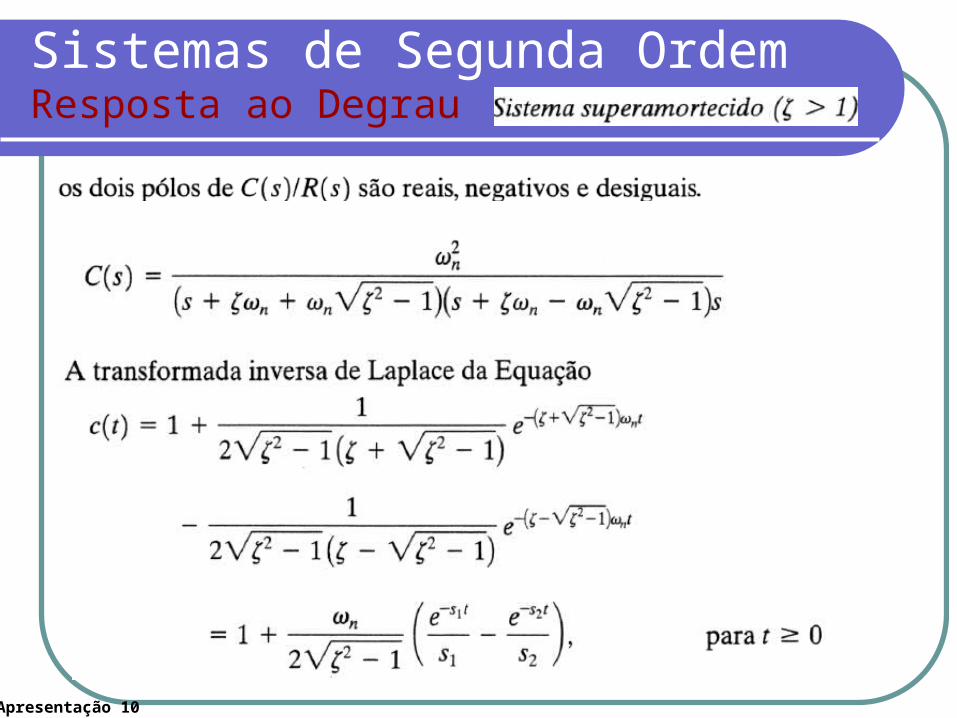
Sistemas de Segunda OrdemResposta ao Degrau
Apresentação 10
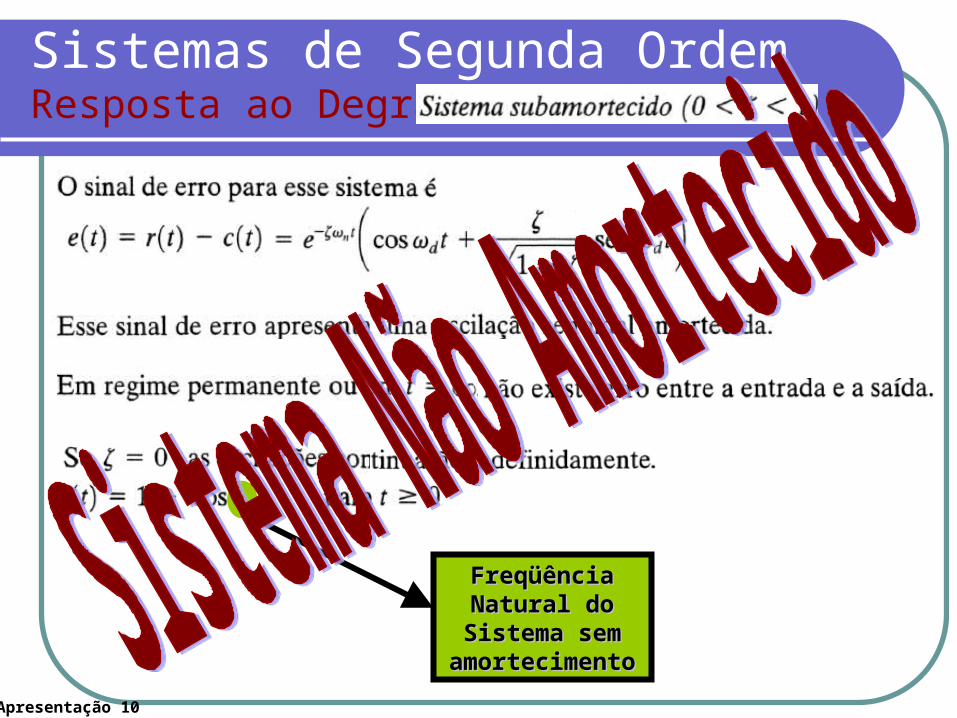
Sistemas de Segunda OrdemResposta ao Degrau
Freqüência Freqüência Natural do Natural do
Sistema sem Sistema sem amortecimentoamortecimento
Apresentação 10
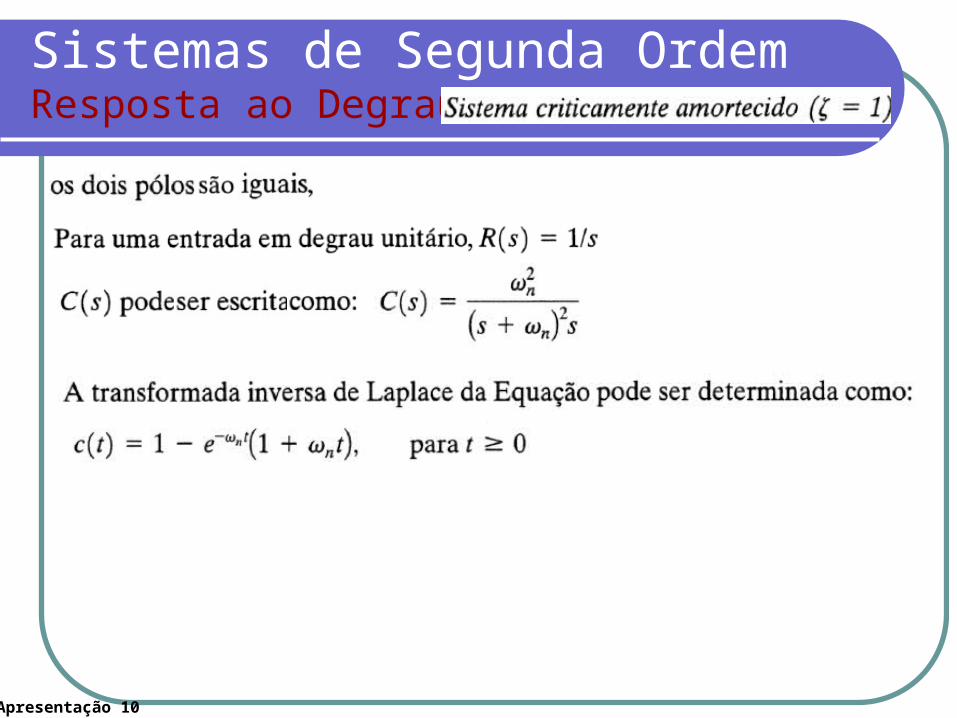
Sistemas de Segunda OrdemResposta ao Degrau
Apresentação 10
Sistemas de Segunda OrdemResposta ao Degrau
Apresentação 10
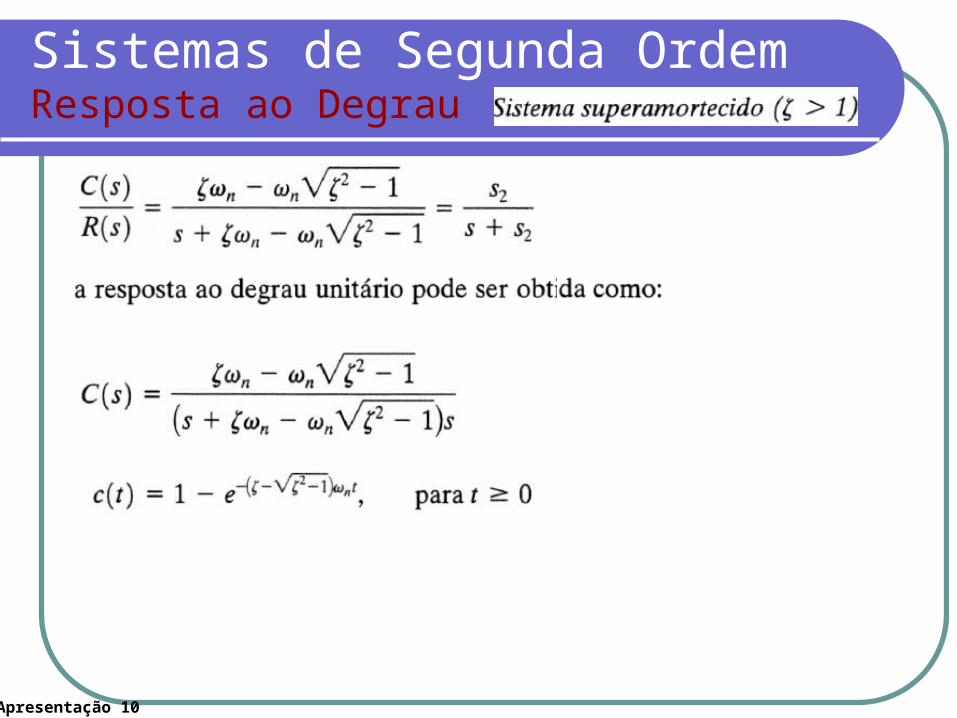
Sistemas de Segunda OrdemResposta ao Degrau
Apresentação 10
Sistemas de Segunda OrdemResposta ao Degrau
Apresentação 10
Sistemas de Segunda OrdemResposta ao Degrau
Apresentação 10
Definições das Especificações da Resposta Transitória(1)
Em muitos casos práticos, as características de Em muitos casos práticos, as características de desempenho de um sistema de controle são desempenho de um sistema de controle são especificadas em termos de grandezas no domínio do especificadas em termos de grandezas no domínio do tempo.tempo.
Com freqüência, estas características são especificadas Com freqüência, estas características são especificadas em termos da resposta transitória ao degrau unitário.em termos da resposta transitória ao degrau unitário.
Características da resposta transitória:Características da resposta transitória: Tempo de atraso, tTempo de atraso, tdd
Tempo de subida, tTempo de subida, trr
Tempo de pico, tTempo de pico, tpp
Máximo sobre-sinal (ou apenas sobre-sinal), MMáximo sobre-sinal (ou apenas sobre-sinal), Mpp
Tempo de acomodação, tTempo de acomodação, tss
Apresentação 10
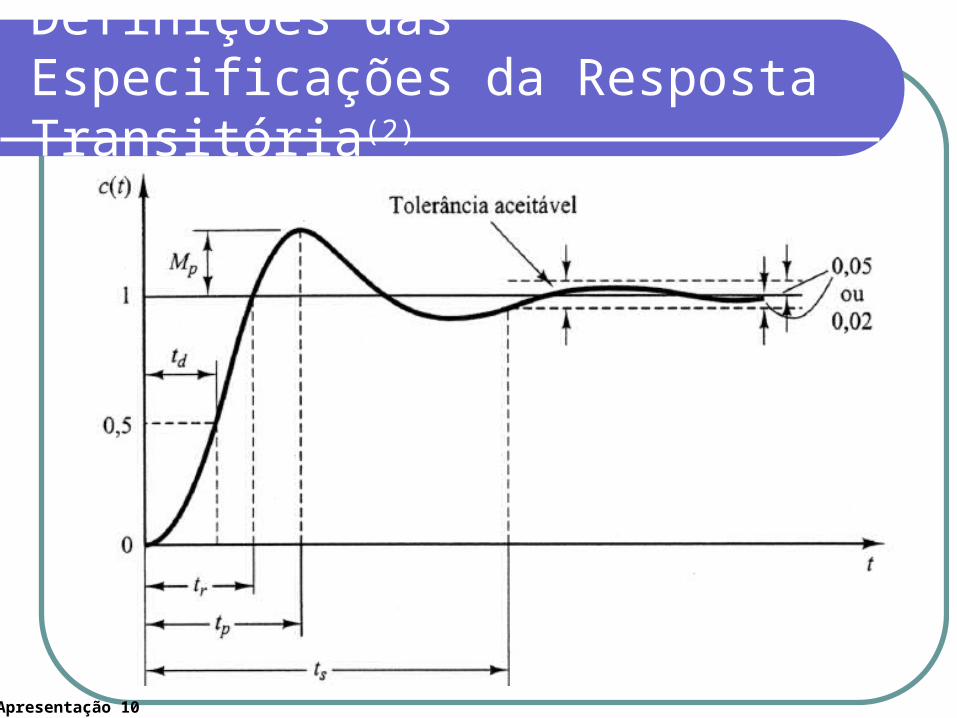
Definições das Especificações da Resposta Transitória(2)
Apresentação 10
Comentários Sobre a Resposta Transitória
Na maioria dos casos, é desejável que a resposta Na maioria dos casos, é desejável que a resposta transitória seja rápida e amortecida. O coeficiente de transitória seja rápida e amortecida. O coeficiente de amortecimento deve estar entre 0,4 e 0,8.amortecimento deve estar entre 0,4 e 0,8.
Valores Pequenos ( ) resultam em excessivo sobre Valores Pequenos ( ) resultam em excessivo sobre sinal.sinal.
Valores Grandes ( ) resultam em sistemas que Valores Grandes ( ) resultam em sistemas que respondem muito lentamente.respondem muito lentamente.
O máximo sobre sinal e o tempo de subida são O máximo sobre sinal e o tempo de subida são conflitantes entre si.conflitantes entre si.
Nos cálculos do tempo de subida, tempo de pico, sobre Nos cálculos do tempo de subida, tempo de pico, sobre sinal e tempo de acomodação, haverá a suposição de sinal e tempo de acomodação, haverá a suposição de que o sistema é subamortecido.que o sistema é subamortecido.
Apresentação 10
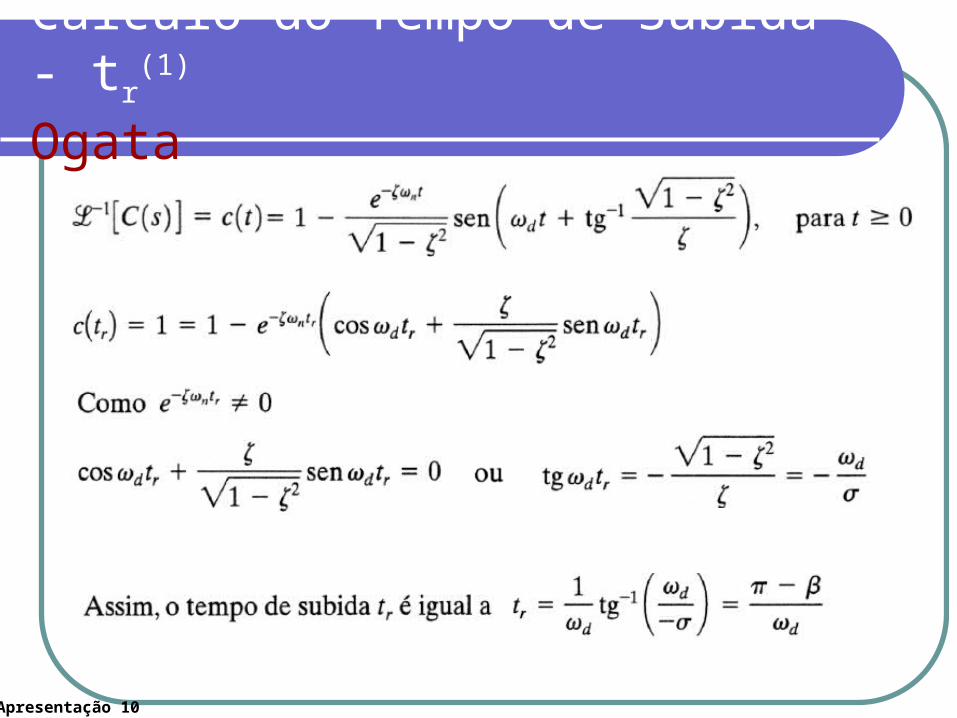
Cálculo do Tempo de Subida - tr(1)
Ogata
Apresentação 10
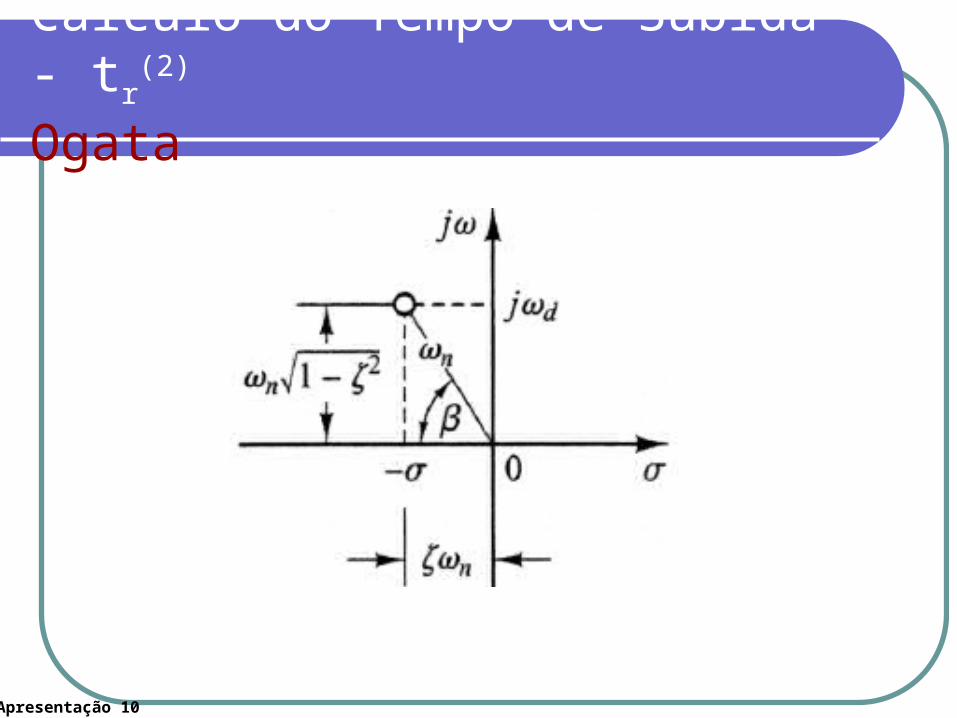
Cálculo do Tempo de Subida - tr(2)
Ogata
Apresentação 10
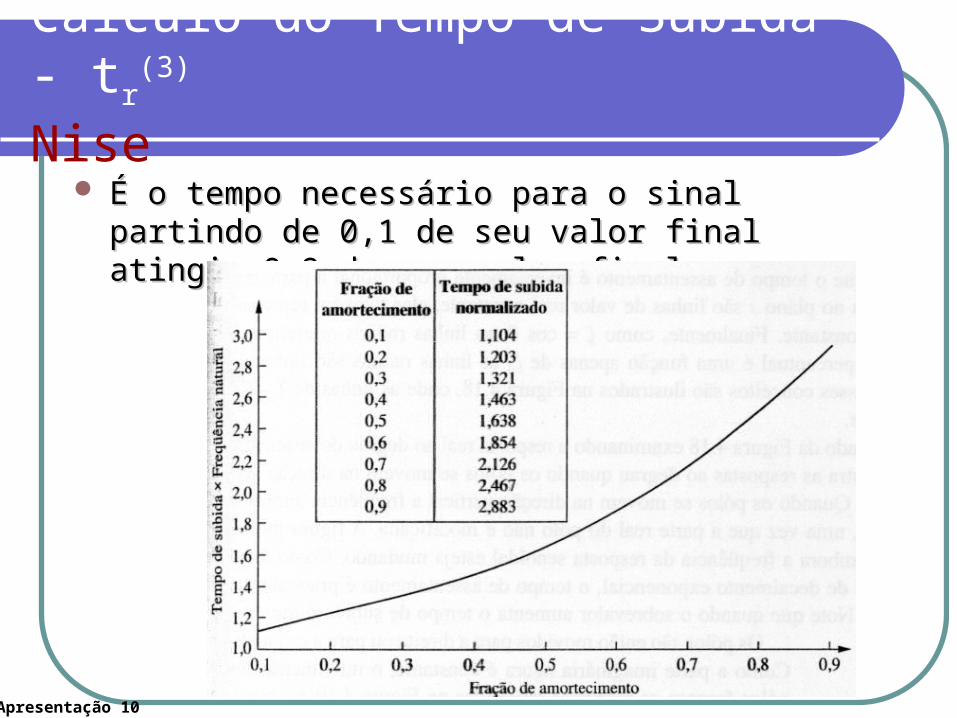
Cálculo do Tempo de Subida - tr(3)
Nise É o tempo necessário para o sinal partindo de É o tempo necessário para o sinal partindo de
0,1 de seu valor final atingir 0,9 de seu valor 0,1 de seu valor final atingir 0,9 de seu valor final.final.
Apresentação 10
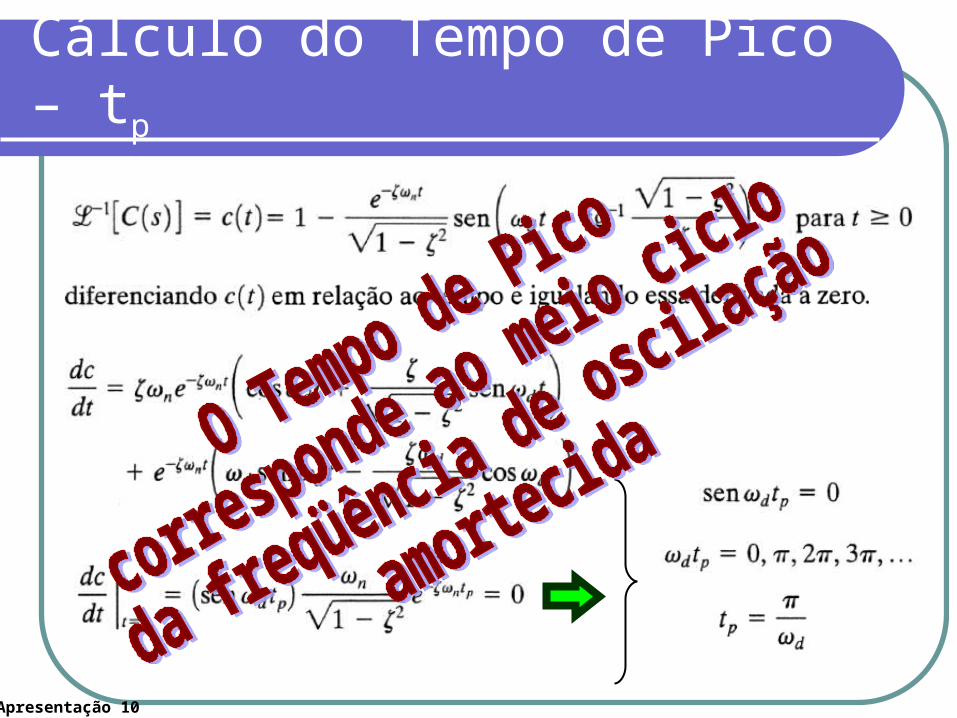
Cálculo do Tempo de Pico – tp
Apresentação 10
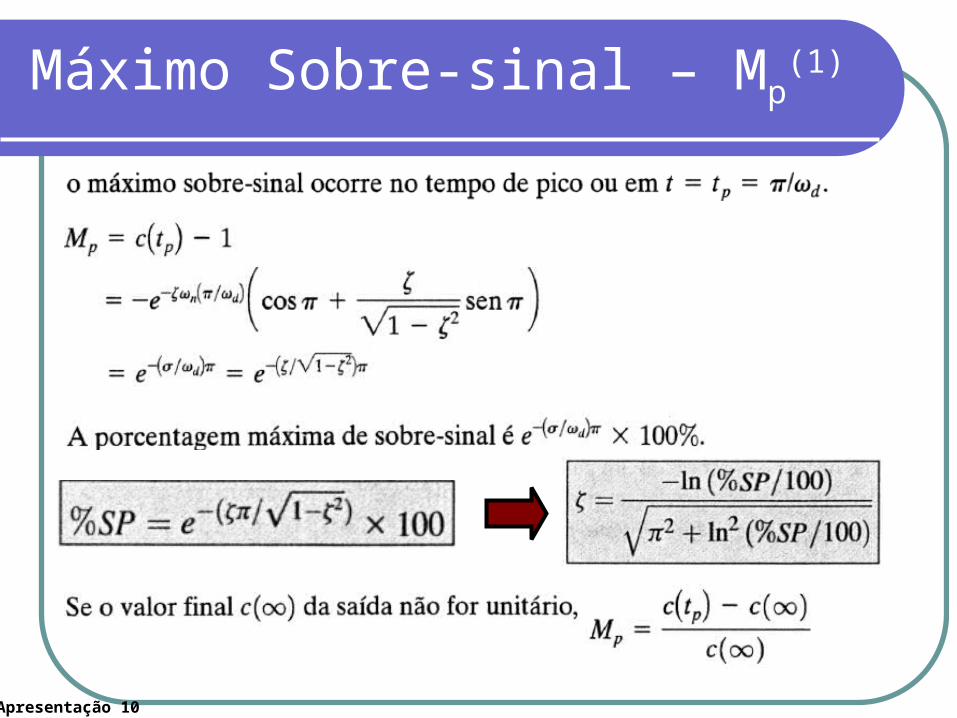
Máximo Sobre-sinal – Mp(1)
Apresentação 10
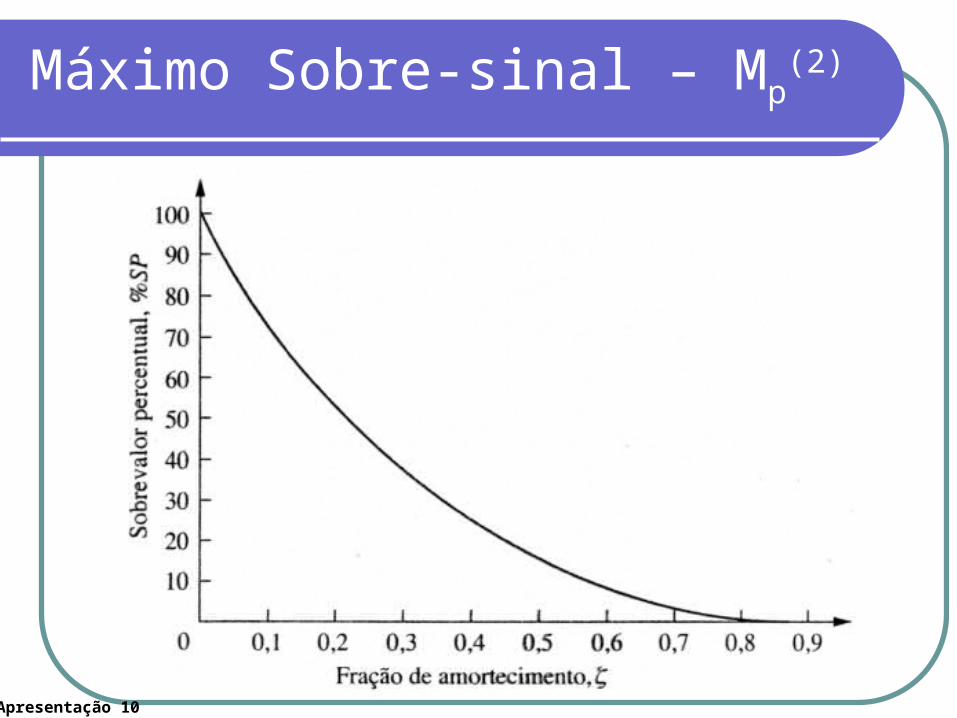
Máximo Sobre-sinal – Mp(2)
Apresentação 10
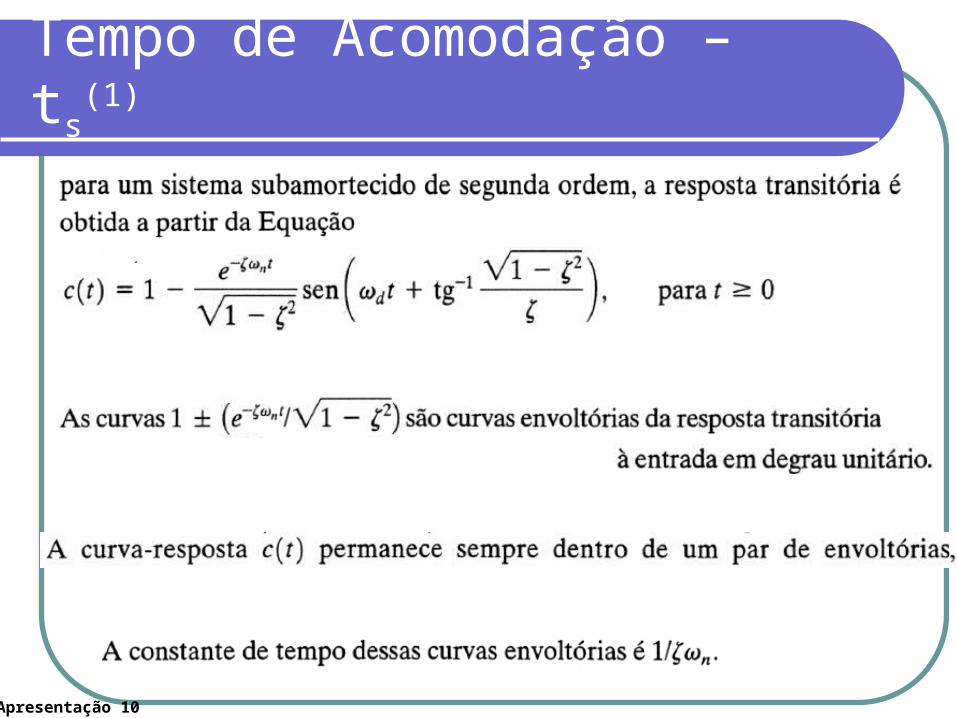
Tempo de Acomodação – ts(1)
Apresentação 10
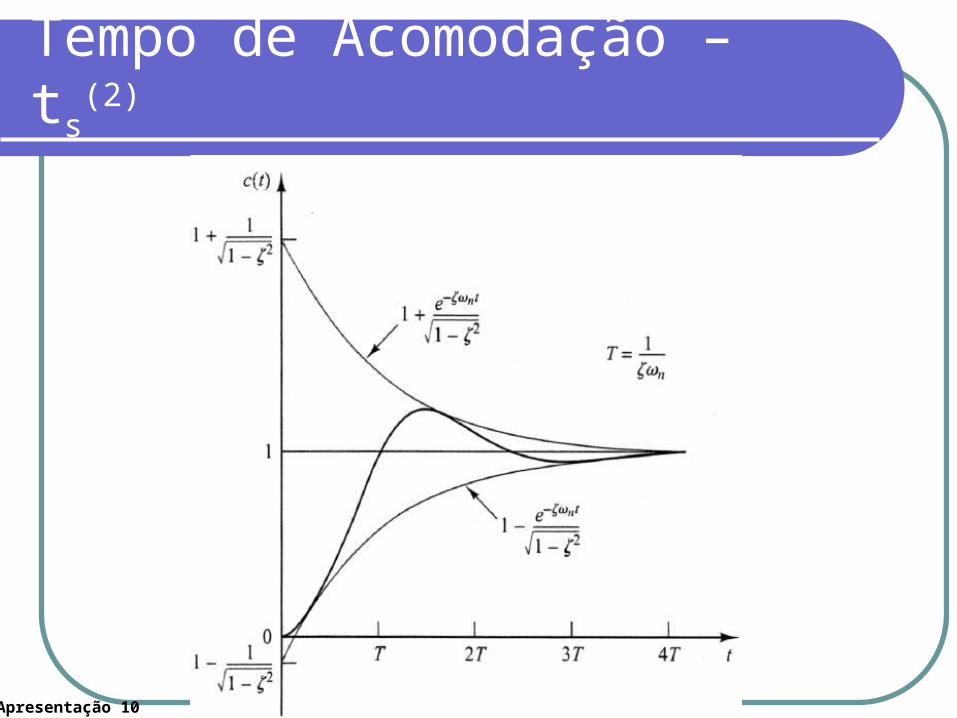
Tempo de Acomodação – ts(2)
Apresentação 10
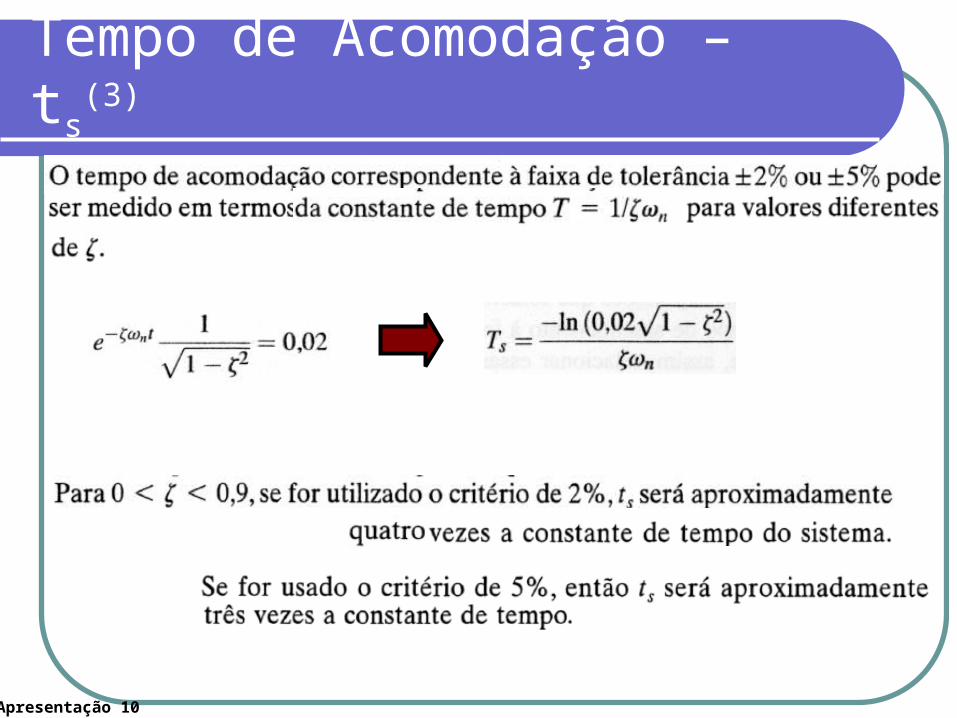
Tempo de Acomodação – ts(3)
Apresentação 10
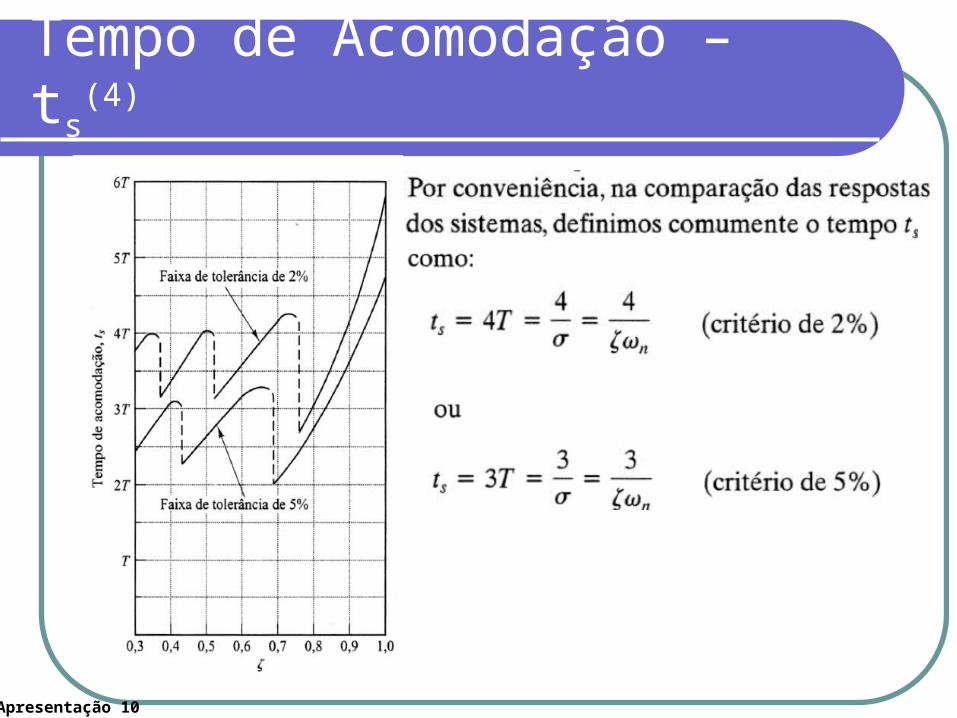
Tempo de Acomodação – ts(4)
Apresentação 10
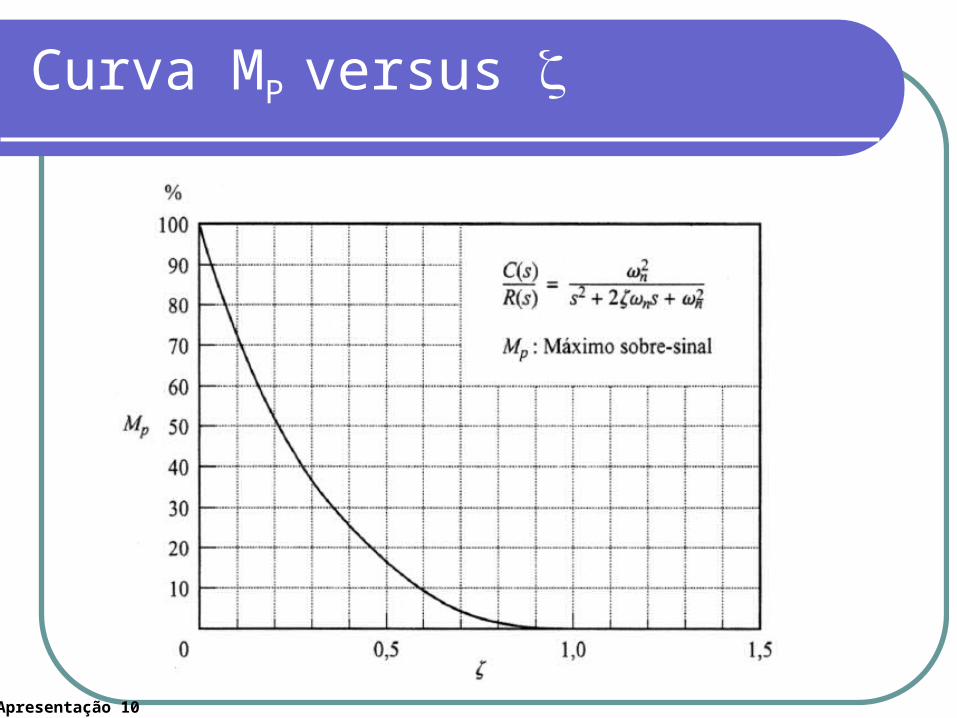
Curva MP versus
Apresentação 10
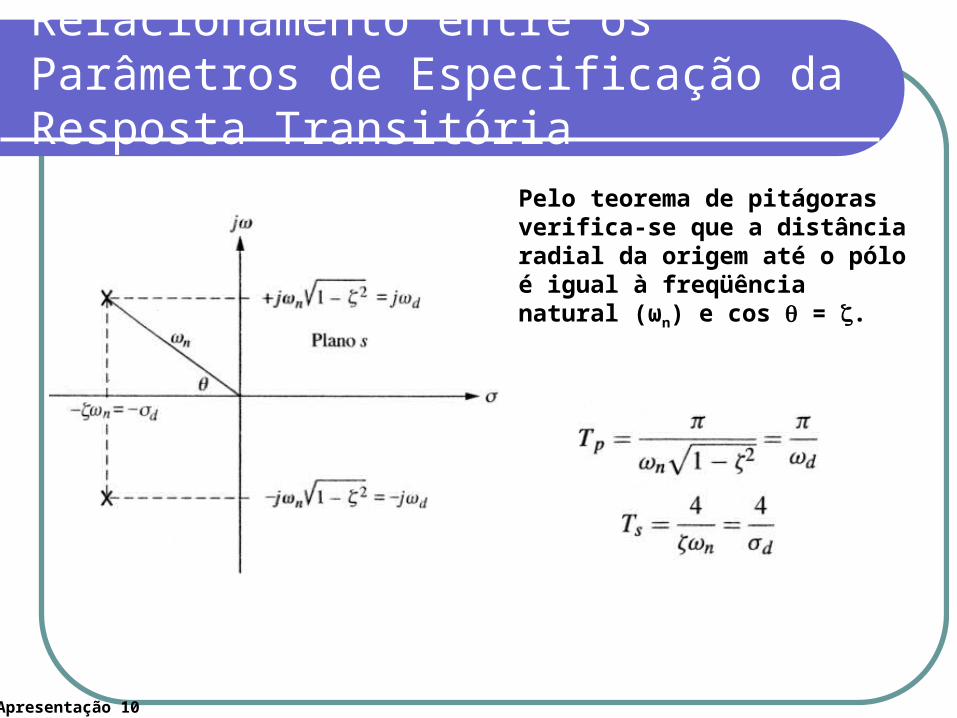
Relacionamento entre os Parâmetros de Especificação da Resposta Transitória
Pelo teorema de pitágoras verifica-se que a distância radial da origem até o pólo é igual à freqüência natural (ωn) e cos = .
Apresentação 10
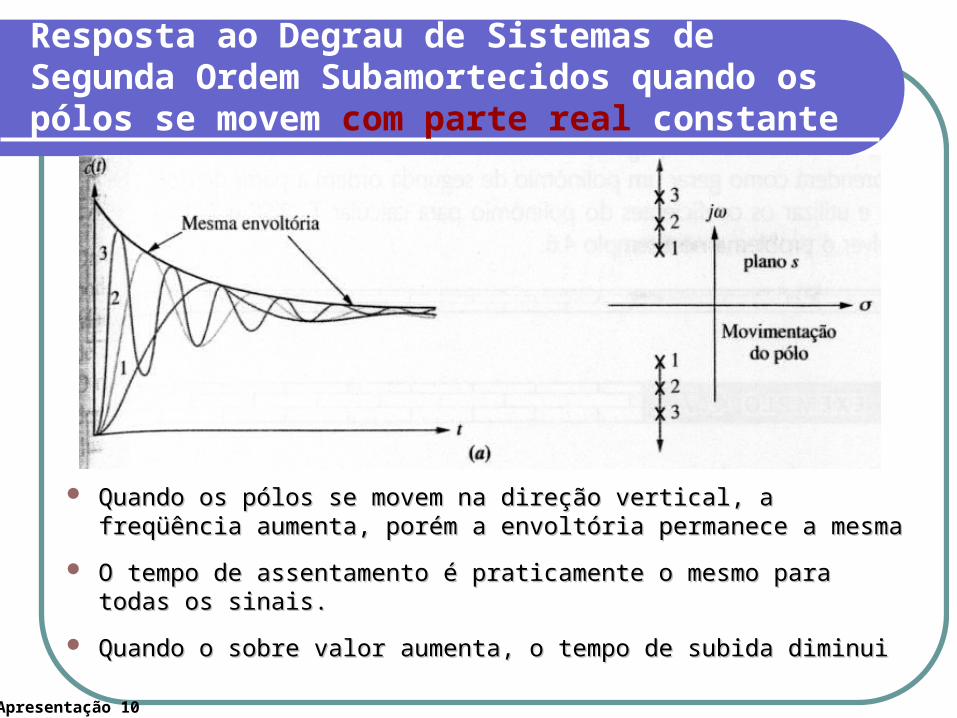
Resposta ao Degrau de Sistemas de Segunda Ordem Subamortecidos quando os pólos se movem com parte real constante
Quando os pólos se movem na direção vertical, a freqüência Quando os pólos se movem na direção vertical, a freqüência aumenta, porém a envoltória permanece a mesmaaumenta, porém a envoltória permanece a mesma
O tempo de assentamento é praticamente o mesmo para O tempo de assentamento é praticamente o mesmo para todas os sinais.todas os sinais.
Quando o sobre valor aumenta, o tempo de subida diminuiQuando o sobre valor aumenta, o tempo de subida diminui
Apresentação 10
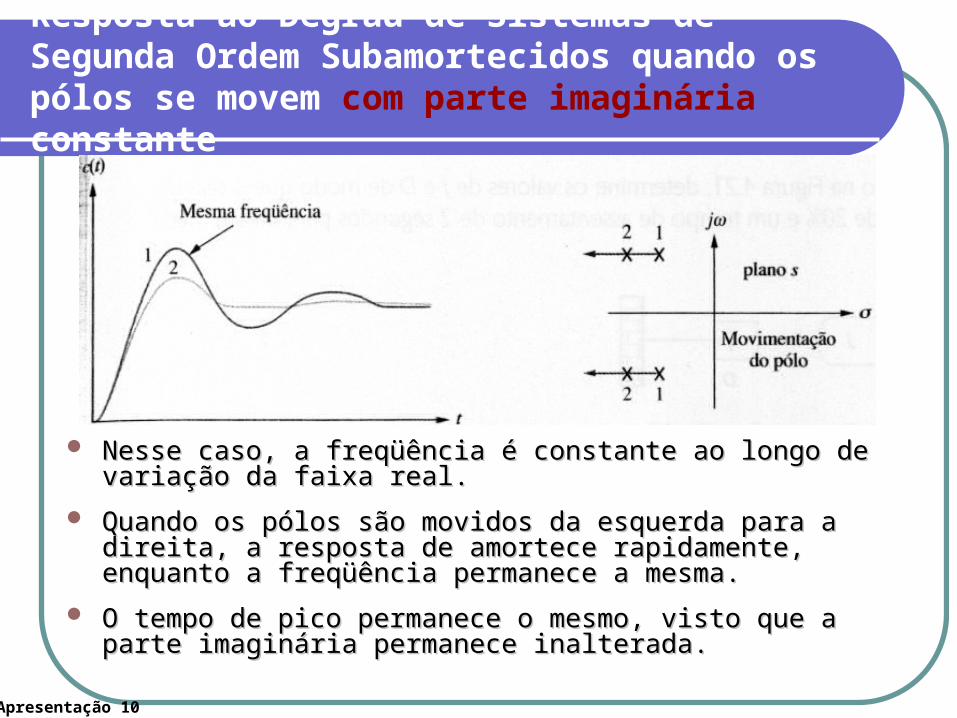
Resposta ao Degrau de Sistemas de Segunda Ordem Subamortecidos quando os pólos se movem com parte imaginária constante
Nesse caso, a freqüência é constante ao longo de variação Nesse caso, a freqüência é constante ao longo de variação da faixa real.da faixa real.
Quando os pólos são movidos da esquerda para a direita, a Quando os pólos são movidos da esquerda para a direita, a resposta de amortece rapidamente, enquanto a freqüência resposta de amortece rapidamente, enquanto a freqüência permanece a mesma.permanece a mesma.
O tempo de pico permanece o mesmo, visto que a parte O tempo de pico permanece o mesmo, visto que a parte imaginária permanece inalterada.imaginária permanece inalterada.
Apresentação 10
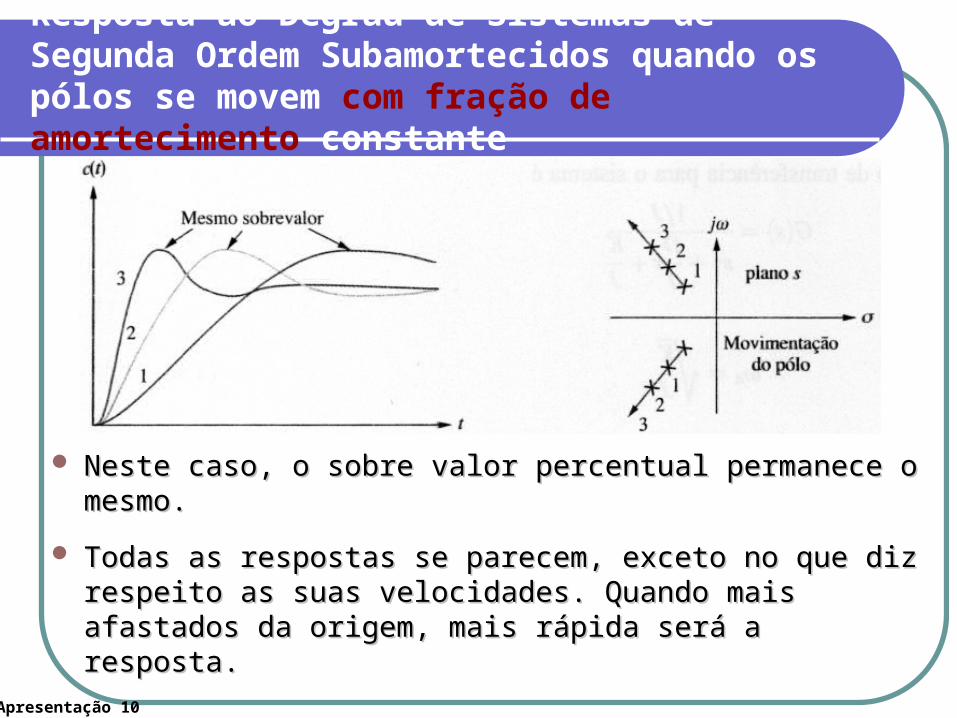
Resposta ao Degrau de Sistemas de Segunda Ordem Subamortecidos quando os pólos se movem com fração de amortecimento constante
Neste caso, o sobre valor percentual permanece o Neste caso, o sobre valor percentual permanece o mesmo.mesmo.
Todas as respostas se parecem, exceto no que diz Todas as respostas se parecem, exceto no que diz respeito as suas velocidades. Quando mais respeito as suas velocidades. Quando mais afastados da origem, mais rápida será a resposta.afastados da origem, mais rápida será a resposta.
Apresentação 10
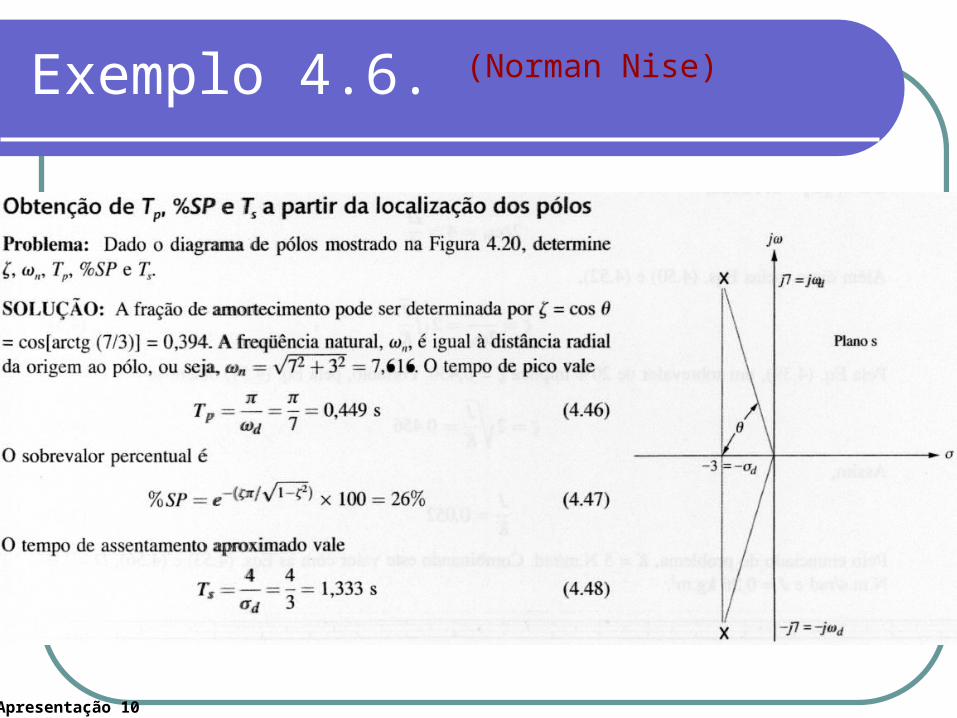
Exemplo 4.6. (Norman Nise)
Apresentação 10
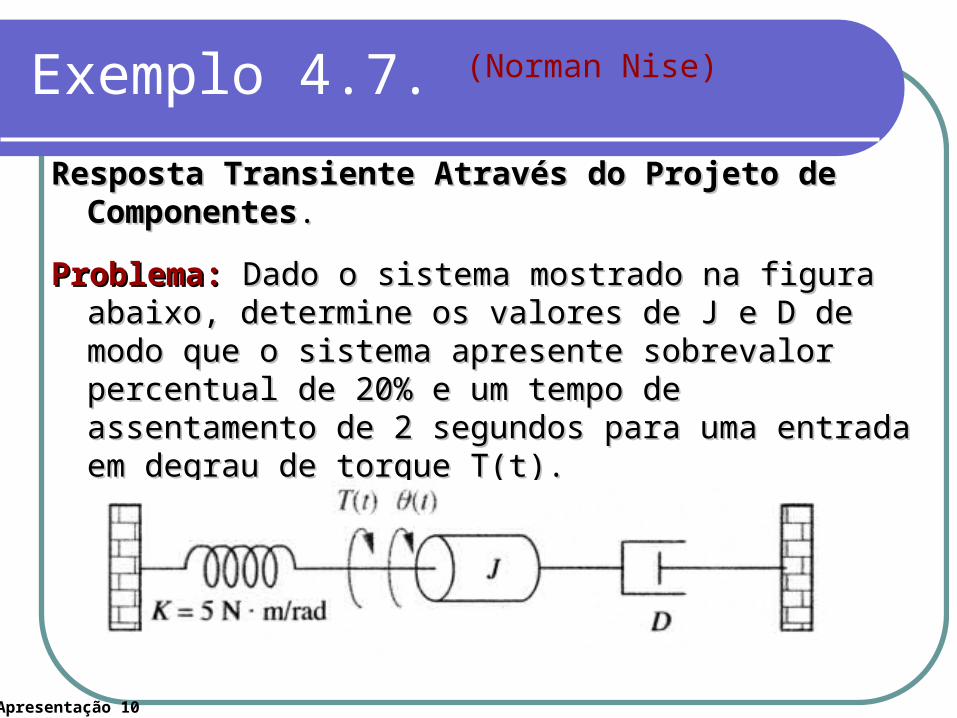
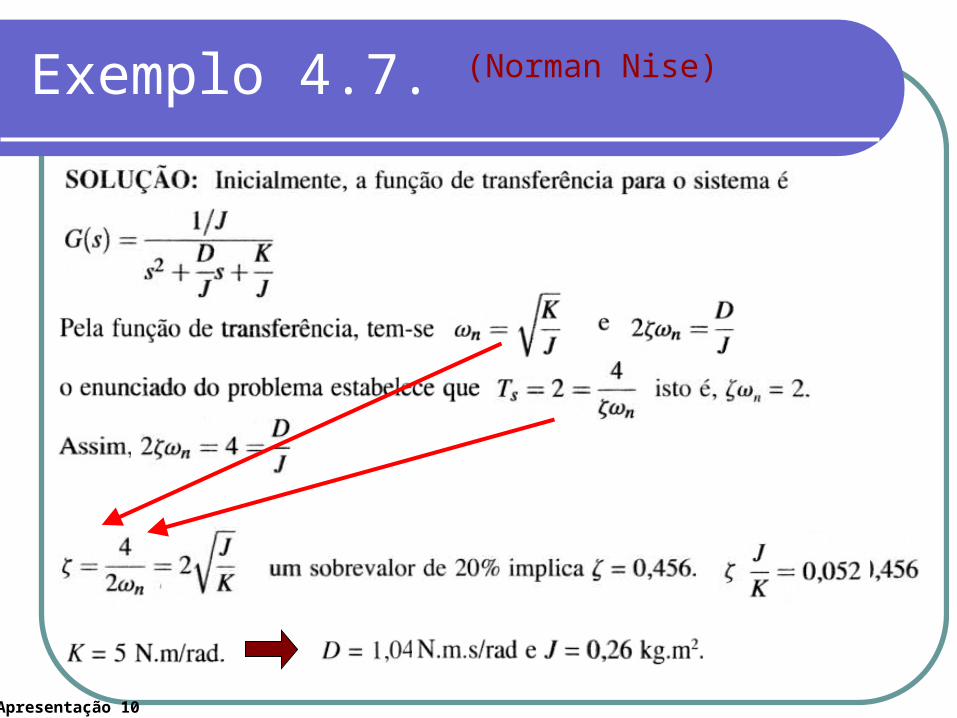
Exemplo 4.7. (Norman Nise)
Resposta Transiente Através do Projeto de Resposta Transiente Através do Projeto de ComponentesComponentes..
Problema:Problema: Dado o sistema mostrado na figura Dado o sistema mostrado na figura abaixo, determine os valores de J e D de modo que abaixo, determine os valores de J e D de modo que o sistema apresente sobrevalor percentual de 20% o sistema apresente sobrevalor percentual de 20% e um tempo de assentamento de 2 segundos para e um tempo de assentamento de 2 segundos para uma entrada em degrau de torque T(t).uma entrada em degrau de torque T(t).
Apresentação 10
Exemplo 4.7. (Norman Nise)
Apresentação 10
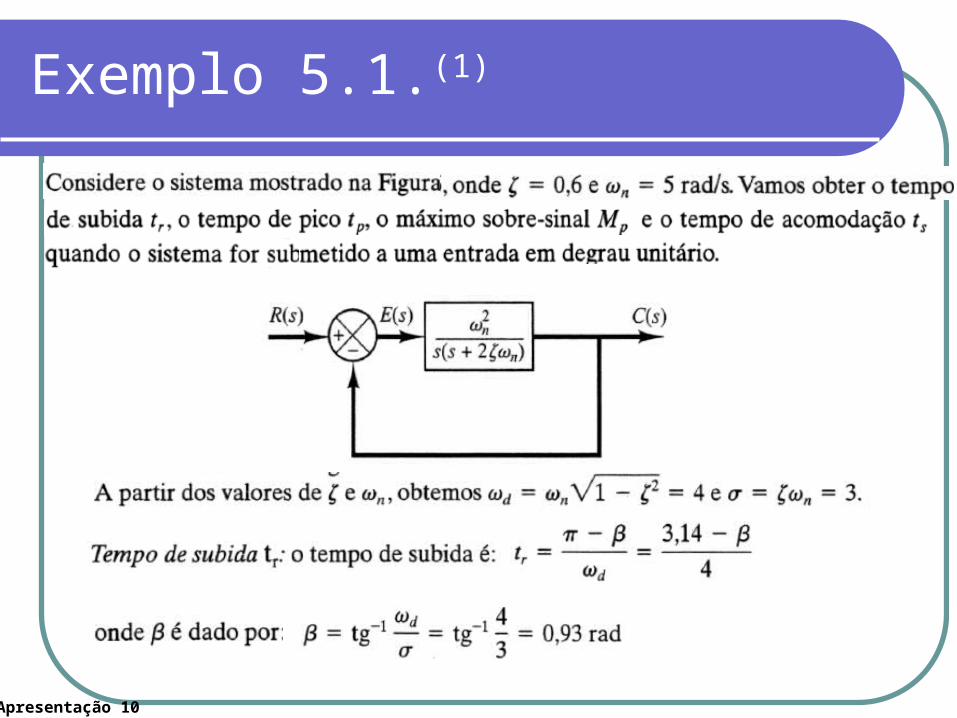
Exemplo 5.1.(1)
Apresentação 10
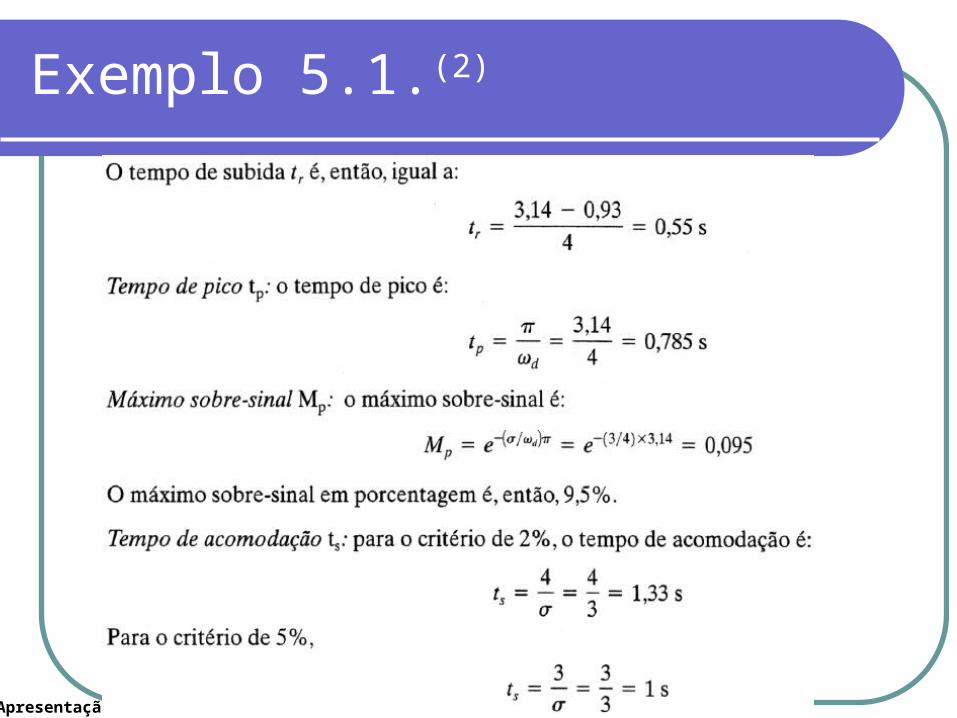
Exemplo 5.1.(2)
Apresentação 10
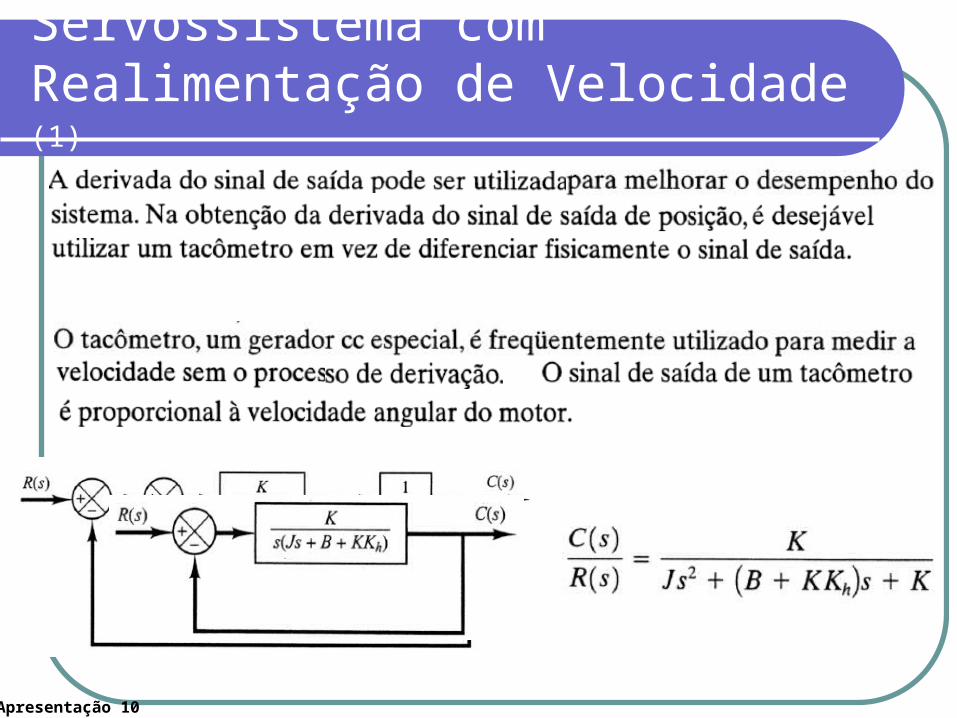
Servossistema com Realimentação de Velocidade (1)
Apresentação 10
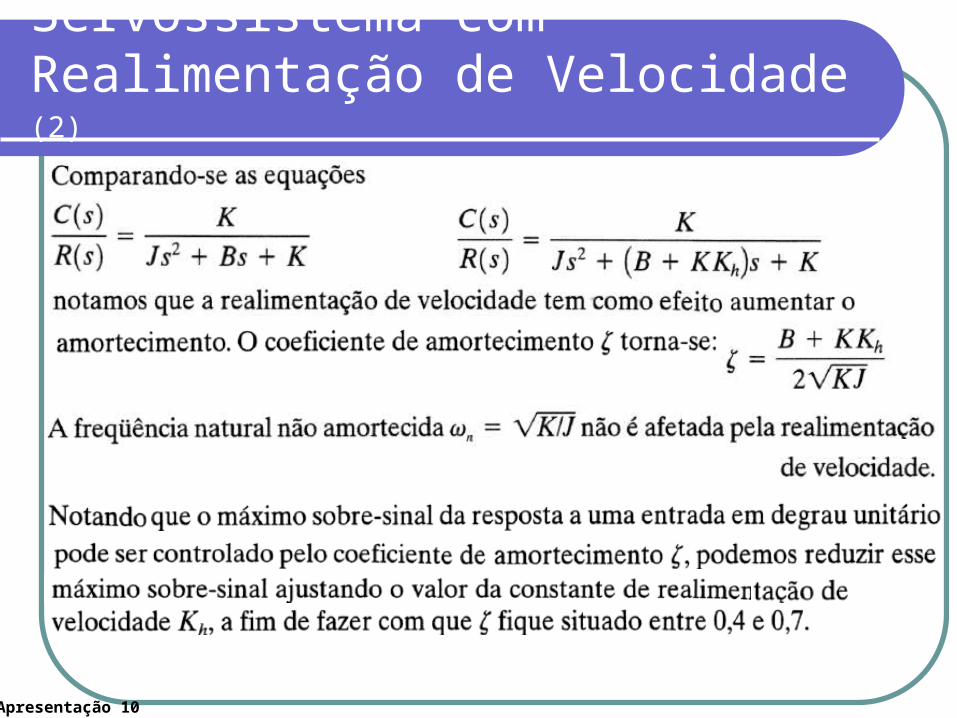
Servossistema com Realimentação de Velocidade (2)
Apresentação 10
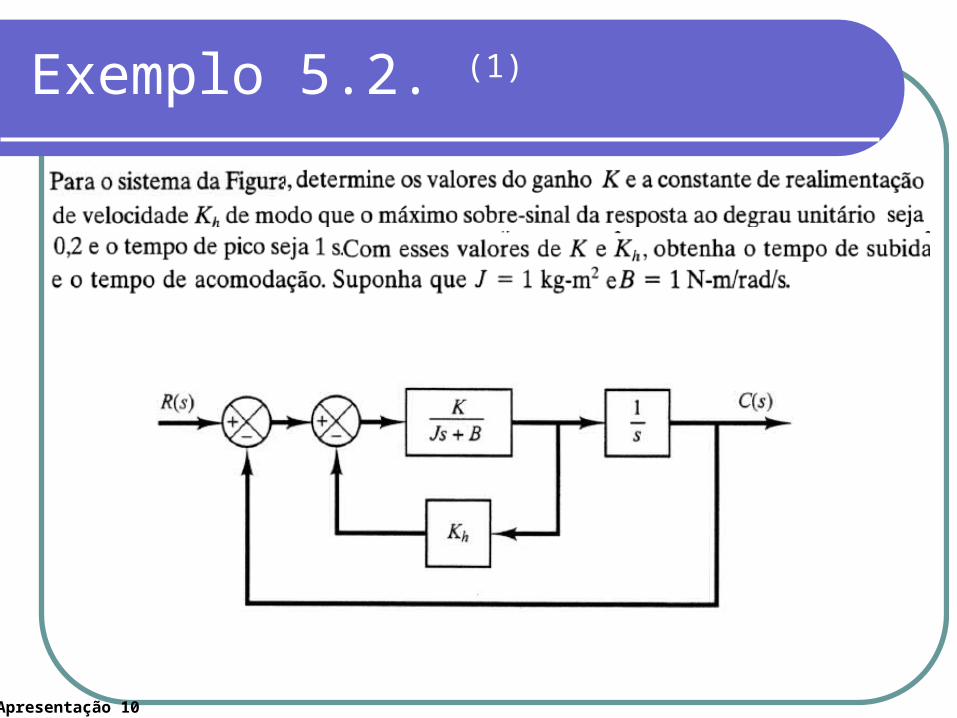
Exemplo 5.2. (1)
Apresentação 10
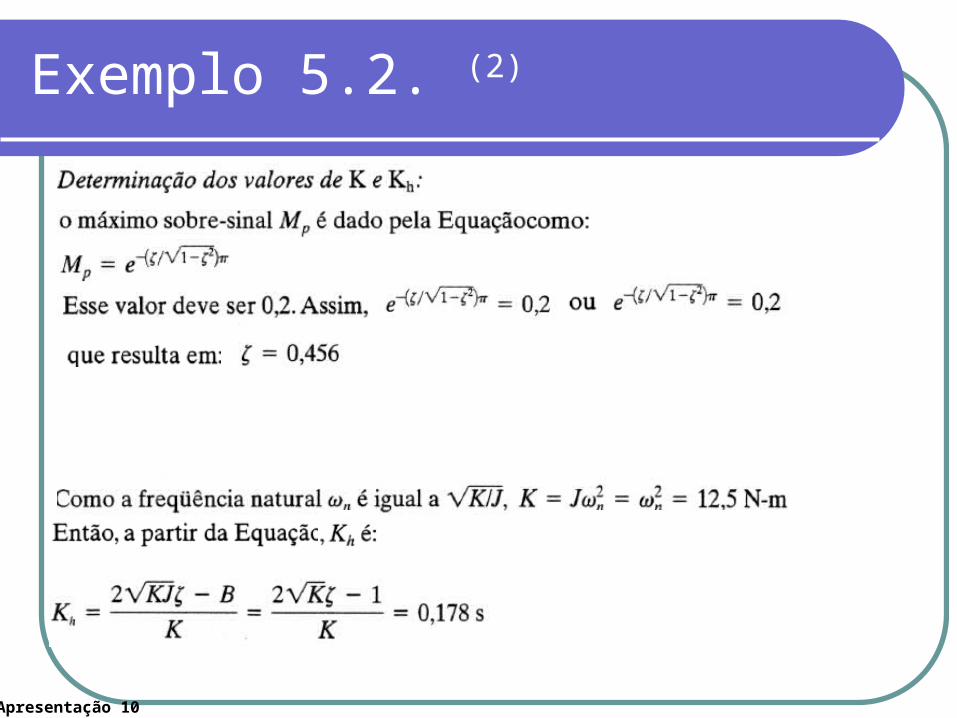
Exemplo 5.2. (2)
Apresentação 10
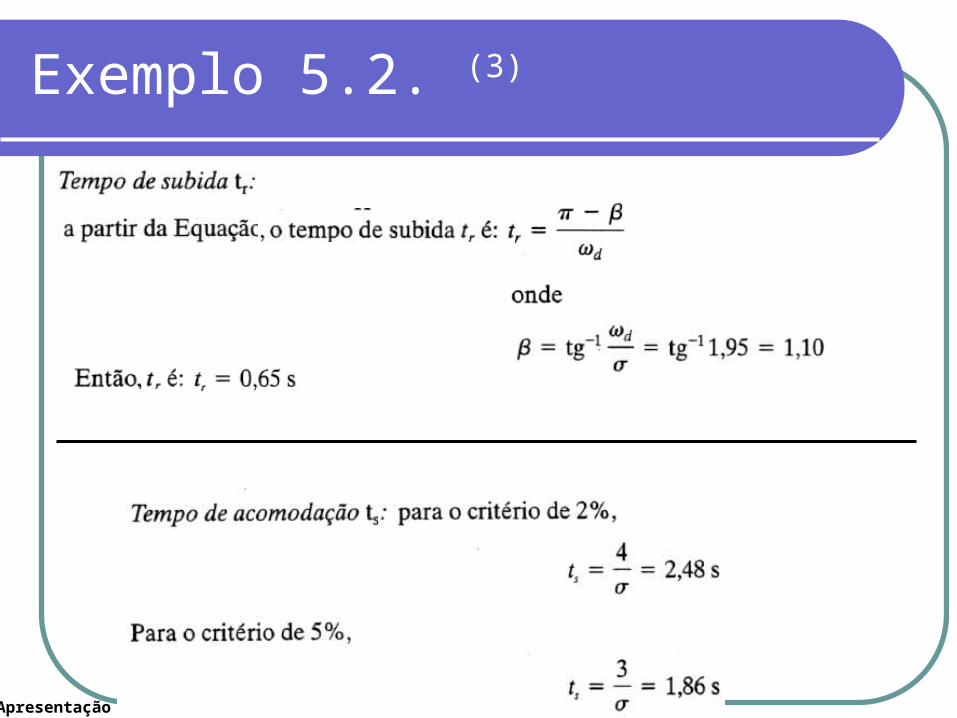
Exemplo 5.2. (3)
Apresentação 10
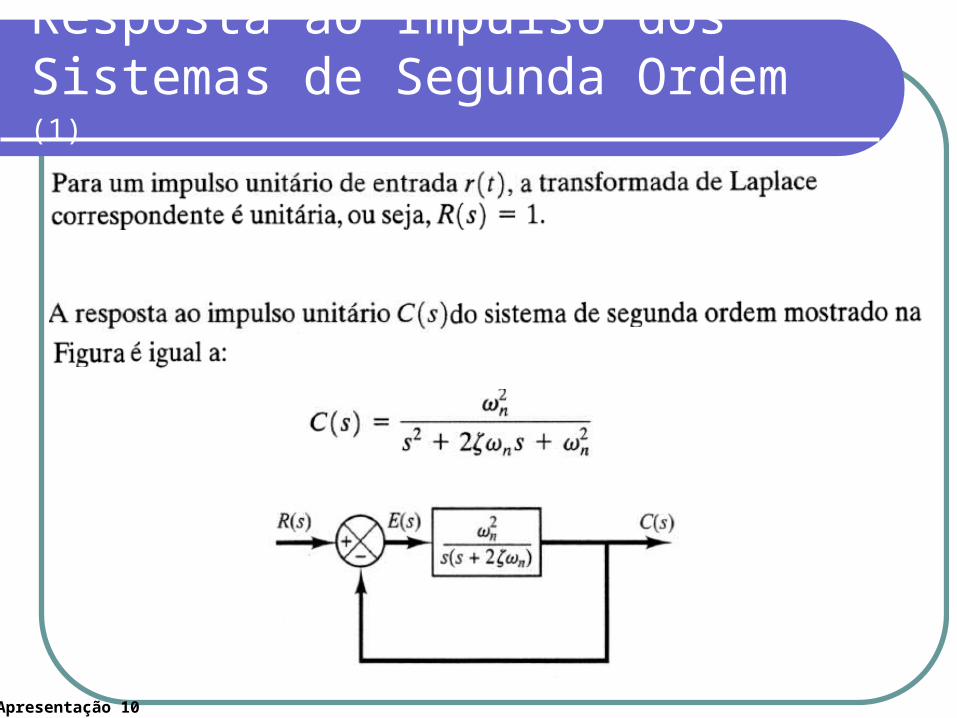
Resposta ao Impulso dos Sistemas de Segunda Ordem (1)
Apresentação 10
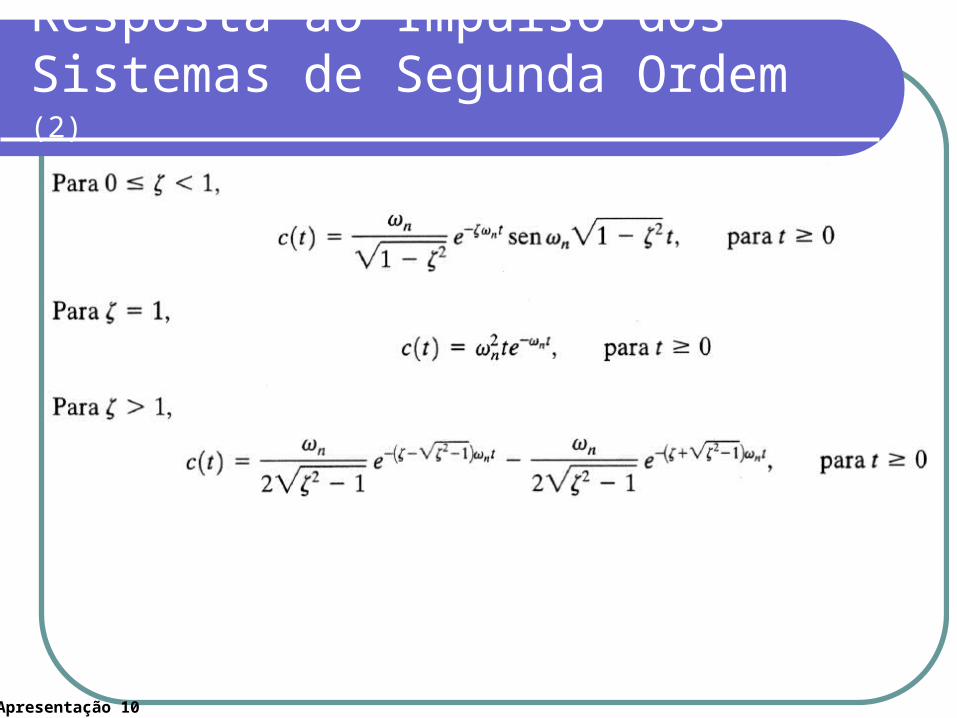
Resposta ao Impulso dos Sistemas de Segunda Ordem (2)
Apresentação 10
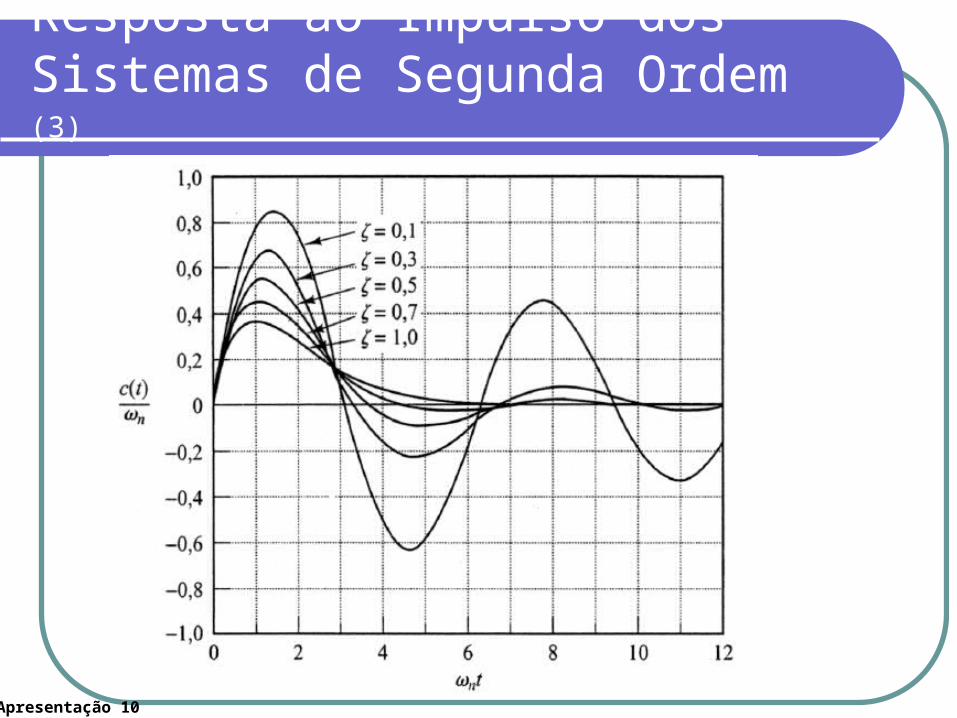
Resposta ao Impulso dos Sistemas de Segunda Ordem (3)
Apresentação 10
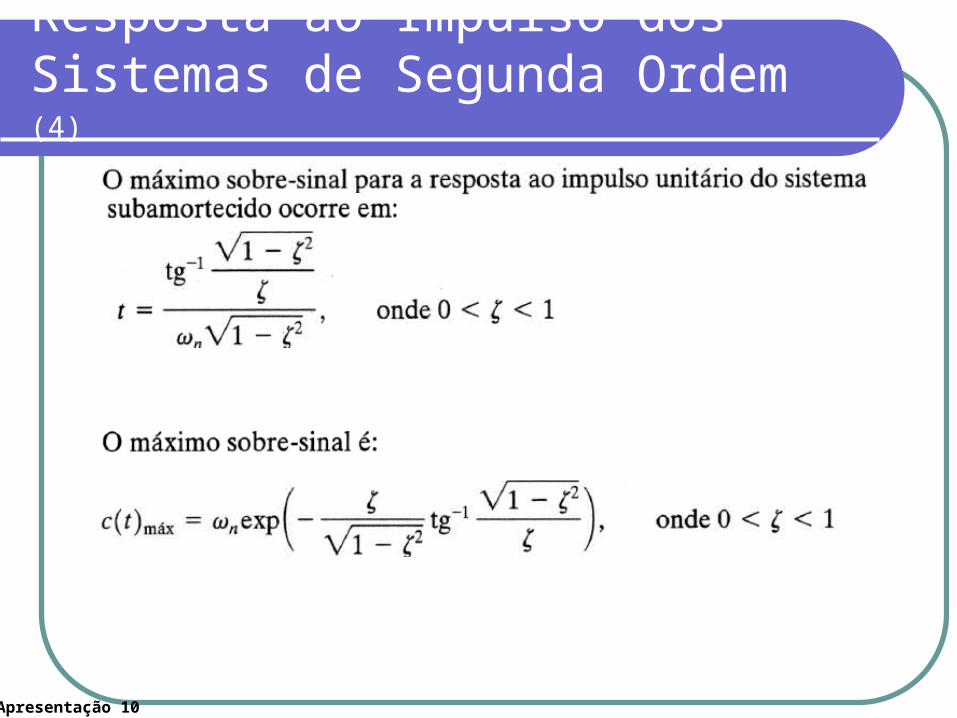
Resposta ao Impulso dos Sistemas de Segunda Ordem (4)
Apresentação 10
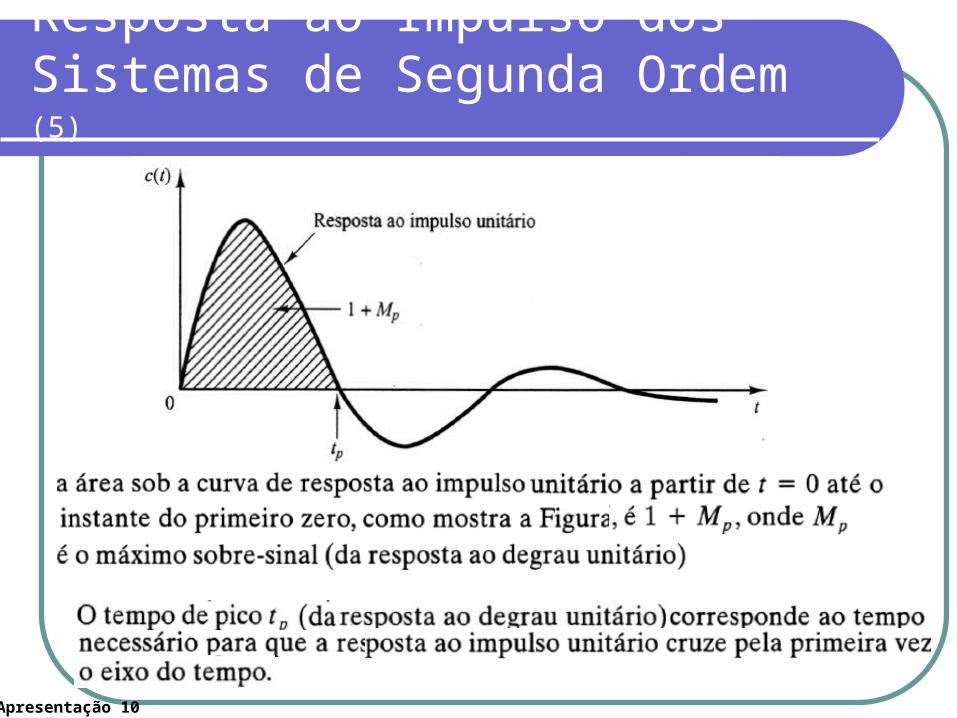
Resposta ao Impulso dos Sistemas de Segunda Ordem (5)