Embed Size (px)
DESCRIPTION
acionamentos
Citation preview
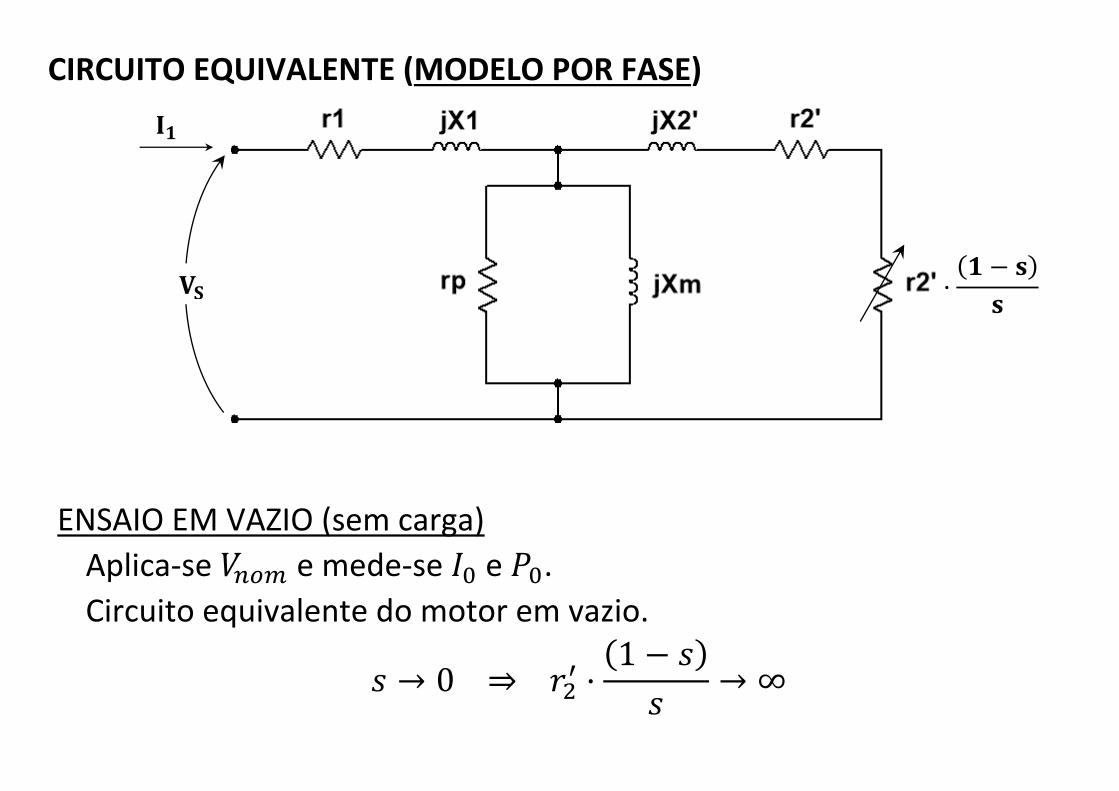
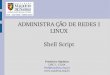
CIRCUITO EQUIVALENTE (MODELO POR FASE)
ENSAIO EM VAZIO (sem carga)
Aplica-se 𝑉𝑛𝑜𝑚 e mede-se 𝐼0 e 𝑃0.
Circuito equivalente do motor em vazio.
𝑠 → 0 ⇒ 𝑟2′ ·(1 − 𝑠)
𝑠→ ∞
·(𝟏 − 𝐬)
𝐬
𝐈𝟏
𝐕𝐒

Em vazio, 𝐼 ≈ 0,3 pu
𝑃0 =𝑉𝑛𝑜𝑚2
𝑟𝑝 ⇒ 𝑟𝑝 =
𝑉𝑛𝑜𝑚2
𝑃0
𝐈𝟎
𝐕𝐧𝐨𝐦 𝐏𝟎
𝐈𝐫 𝐈𝐱
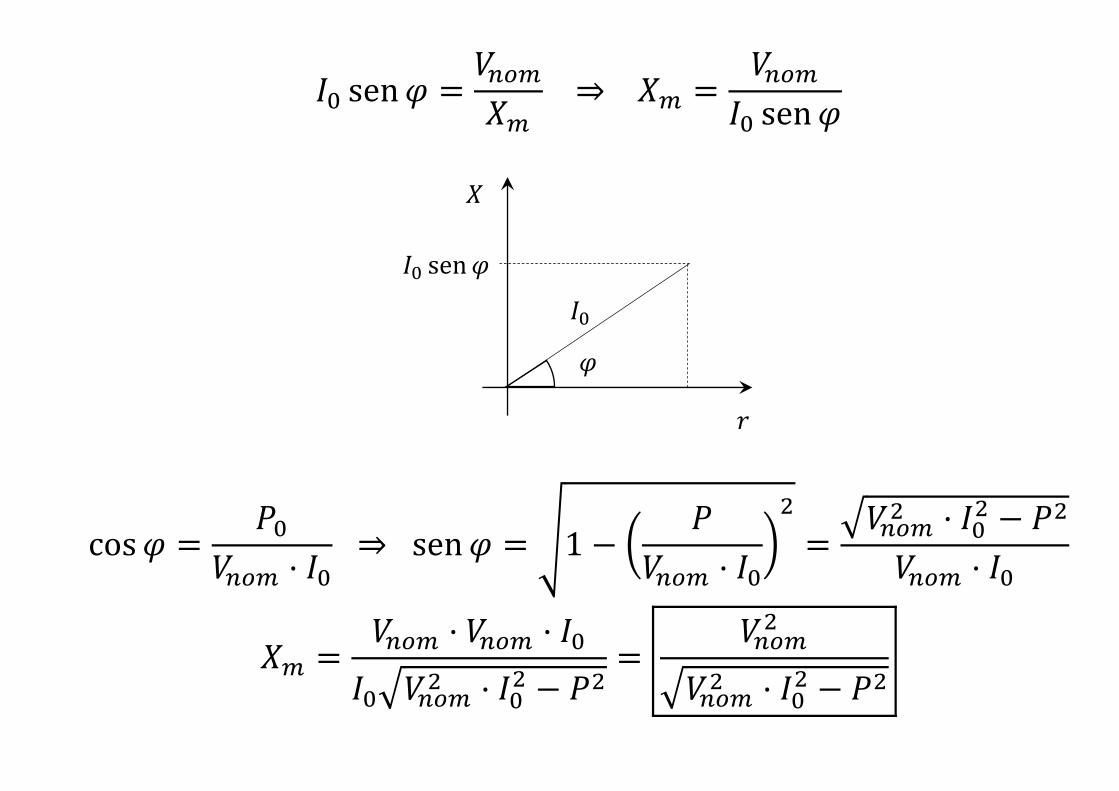
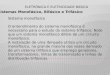
𝐼0 sen𝜑 =𝑉𝑛𝑜𝑚𝑋𝑚
⇒ 𝑋𝑚 =𝑉𝑛𝑜𝑚𝐼0 sen𝜑
cos𝜑 =𝑃0
𝑉𝑛𝑜𝑚 · 𝐼0 ⇒ sen𝜑 = √1 − (
𝑃
𝑉𝑛𝑜𝑚 · 𝐼0)2
=√𝑉𝑛𝑜𝑚
2 · 𝐼02 − 𝑃2
𝑉𝑛𝑜𝑚 · 𝐼0
𝑋𝑚 =𝑉𝑛𝑜𝑚 · 𝑉𝑛𝑜𝑚 · 𝐼0
𝐼0√𝑉𝑛𝑜𝑚2 · 𝐼0
2 − 𝑃2=
𝑉𝑛𝑜𝑚2
√𝑉𝑛𝑜𝑚2 · 𝐼0
2 − 𝑃2
𝜑
𝐼0
𝑟
𝑋
𝐼0 sen𝜑

ENSAIO EM CURTO-CIRCUITO (CC)
Curto-circuito ⇒ 𝑟2′ ·(1−𝑠)
𝑠= 0 ⇒ 𝑠 = 1 (rotor bloqueado)
Aplica-se 𝐼𝑛𝑜𝑚 e mede-se 𝑉𝐶𝐶 (menor que 𝑉𝑛𝑜𝑚) e 𝑃𝐶𝐶.
Circuito equivalente em curto-circuito:
(𝑟1 + 𝑟2′)⏟
este modelonão distingue
· 𝐼𝑛𝑜𝑚2 = 𝑃𝐶𝐶 ⇒ 𝑟1 + 𝑟2
′ =𝑃𝐶𝐶𝐼𝑛𝑜𝑚2
𝐈𝐧𝐨𝐦
𝐕𝐂𝐂 𝐏𝐂𝐂

𝑟1 ≈ 𝑟2′ na maioria dos casos. Também pode ser 𝑟1 = 1 a 3 × 𝑟2
′.
Para motores de alto escorregamento ⇒ ~0,4 𝑟1 e ~0,6 𝑟2′
Como, analogamente, sen𝜑 =√𝑉𝐶𝐶
2 ·𝐼𝑛𝑜𝑚2 −𝑃𝐶𝐶
2
𝑉𝐶𝐶·𝐼𝑛𝑜𝑚, temos:
(𝑋1 + 𝑋2′) =
𝑉𝐶𝐶𝐼𝑛𝑜𝑚
·√𝑉𝐶𝐶
2 · 𝐼𝑛𝑜𝑚2 − 𝑃𝐶𝐶
2
𝑉𝐶𝐶 · 𝐼𝑛𝑜𝑚=√𝑉𝐶𝐶
2 · 𝐼𝑛𝑜𝑚2 − 𝑃𝐶𝐶
2
𝐼𝑛𝑜𝑚2
Distribuição entre 𝑋1 e 𝑋2′ :
De 𝑋2′ = 𝑋1 para motores com curva normal de conjugado
até 𝑋2′ = 1 a 2 × 𝑋1 para motores de alto escorregamento.
𝜑
𝑉𝐶𝐶 𝑉𝐶𝐶 sen𝜑 = (𝑋1 + 𝑋2
′) · 𝐼𝑛𝑜𝑚

EXERCÍCIO
Dado o seguinte circuito equivalente:
de um motor de 2.000 hp, 2.300 V, 3Ø, 4 polos, 60 Hz e ligação em Y
com 𝑠𝑛𝑜𝑚 = 0,0375.
Calcular a eficiência do motor.
1 hp = 550 lbf · ft s⁄ = 745,7 W
1 cv = 75 kgf · m s⁄ = 735,5 W
𝐈𝟏
𝐕𝐒 𝟎, 𝟏𝟐 ·(𝟏 − 𝐬)
𝐬 𝛀
𝟎, 𝟏𝟐 𝛀 𝒋𝟎, 𝟑𝟐 𝛀 𝒋𝟎, 𝟑𝟐 𝛀 𝟎, 𝟎𝟐 𝛀
𝟒𝟓𝟏, 𝟐 𝛀 𝒋𝟓𝟎 𝛀
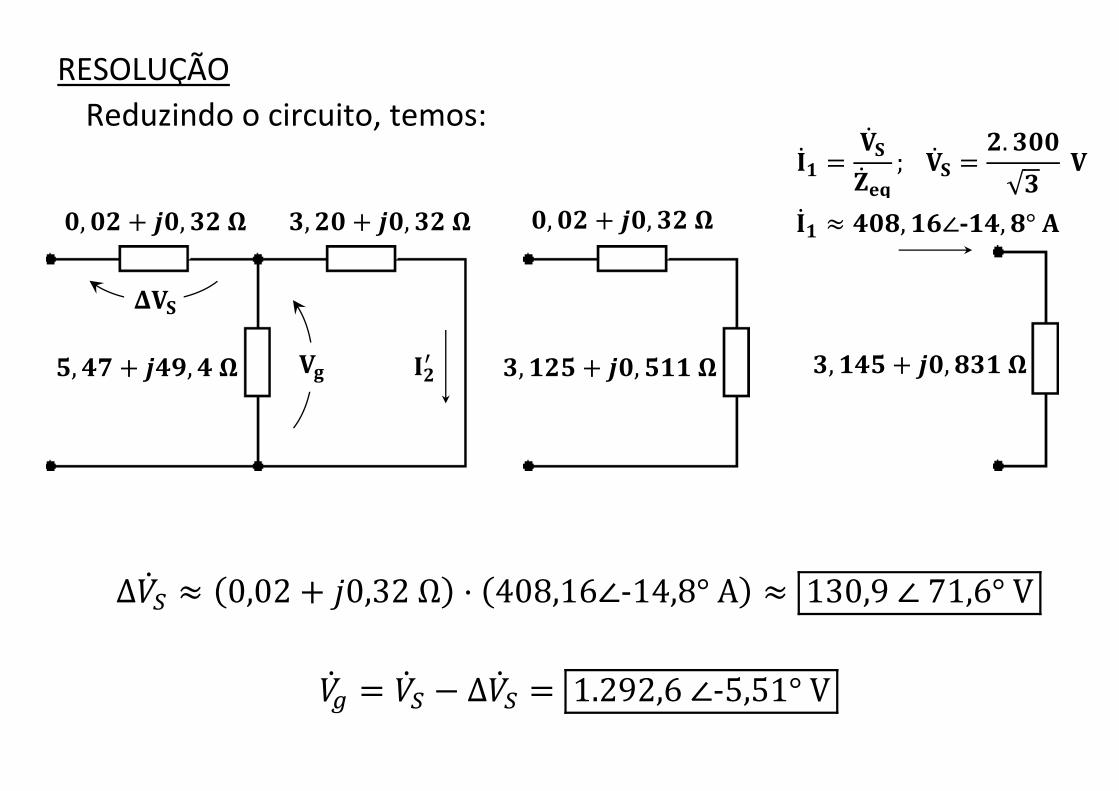
RESOLUÇÃO
Reduzindo o circuito, temos:
Δ�̇�𝑆 ≈ (0,02 + 𝑗0,32 Ω) · (408,16∠-14,8° A) ≈ 130,9 ∠ 71,6° V
�̇�𝑔 = �̇�𝑆 − Δ�̇�𝑆 = 1.292,6 ∠-5,51° V
𝟑, 𝟐𝟎 + 𝒋𝟎, 𝟑𝟐 𝛀 𝟎, 𝟎𝟐 + 𝒋𝟎, 𝟑𝟐 𝛀
𝟓, 𝟒𝟕 + 𝒋𝟒𝟗, 𝟒 𝛀 𝐕𝐠 𝐈𝟐′
𝚫𝐕𝐒
𝟎, 𝟎𝟐 + 𝒋𝟎, 𝟑𝟐 𝛀
𝟑, 𝟏𝟐𝟓 + 𝒋𝟎, 𝟓𝟏𝟏 𝛀
�̇�𝟏 ≈ 𝟒𝟎𝟖, 𝟏𝟔∠-𝟏𝟒, 𝟖° 𝐀
𝟑, 𝟏𝟒𝟓 + 𝒋𝟎, 𝟖𝟑𝟏 𝛀
�̇�𝟏 =�̇�𝐒
�̇�𝐞𝐪; �̇�𝐒 =
𝟐. 𝟑𝟎𝟎
√𝟑 𝐕
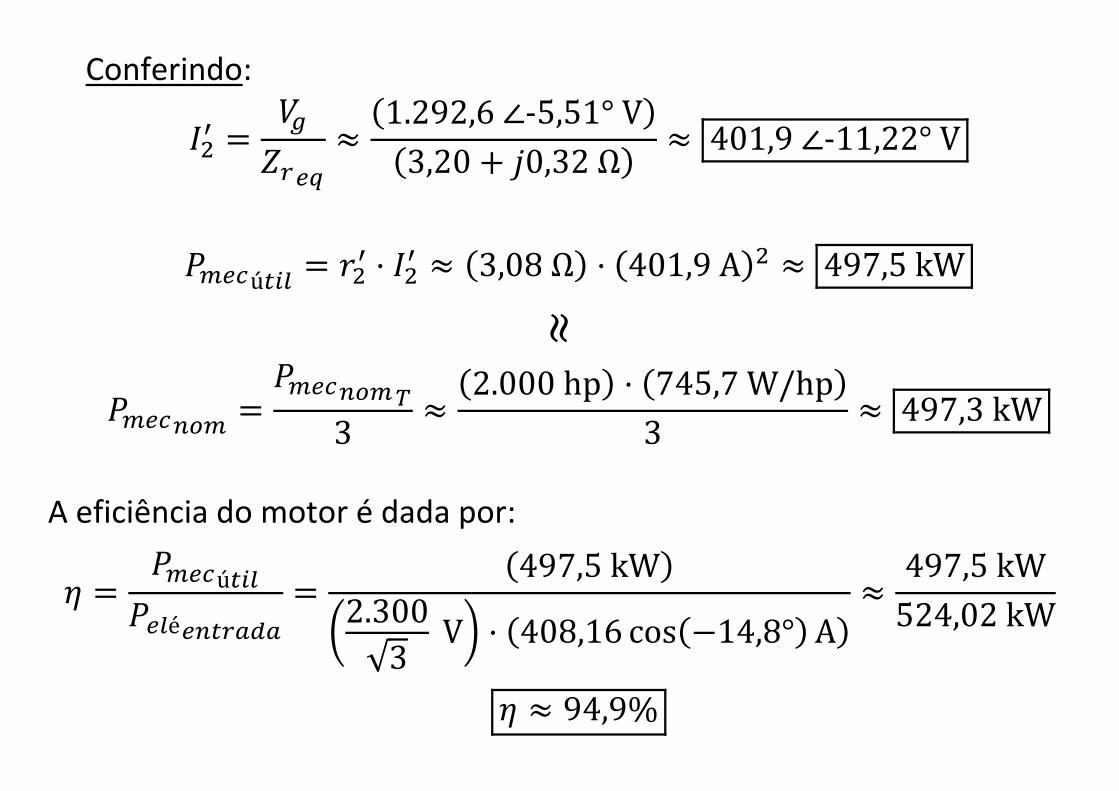
Conferindo:
𝐼2′ =
𝑉𝑔
𝑍𝑟𝑒𝑞≈(1.292,6 ∠-5,51° V)
(3,20 + 𝑗0,32 Ω)≈ 401,9 ∠-11,22° V
𝑃𝑚𝑒𝑐ú𝑡𝑖𝑙 = 𝑟2′ · 𝐼2
′ ≈ (3,08 Ω) · (401,9 A)2 ≈ 497,5 kW
𝑃𝑚𝑒𝑐𝑛𝑜𝑚 =𝑃𝑚𝑒𝑐𝑛𝑜𝑚𝑇
3≈(2.000 hp) · (745,7 W/hp)
3≈ 497,3 kW
A eficiência do motor é dada por:
𝜂 =𝑃𝑚𝑒𝑐ú𝑡𝑖𝑙𝑃𝑒𝑙é𝑒𝑛𝑡𝑟𝑎𝑑𝑎
=(497,5 kW)
(2.300
√3 V) · (408,16 cos(−14,8°) A)
≈497,5 kW
524,02 kW
𝜂 ≈ 94,9%
≈
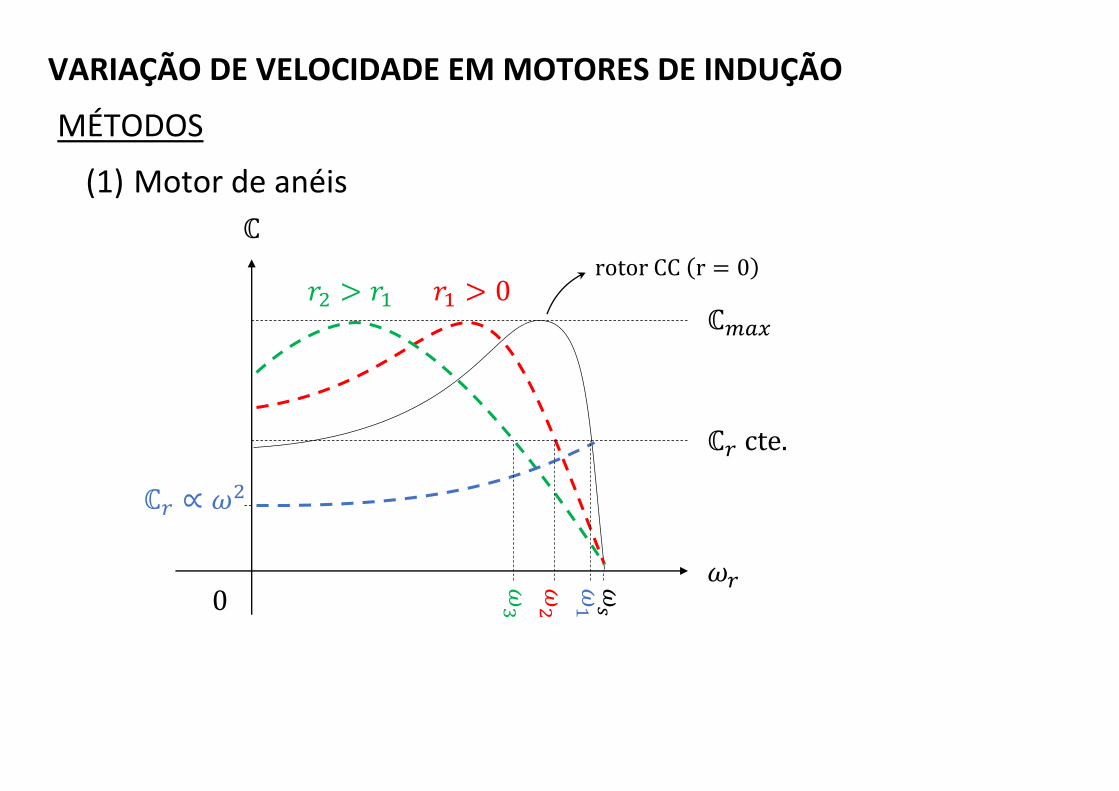
VARIAÇÃO DE VELOCIDADE EM MOTORES DE INDUÇÃO
MÉTODOS
(1) Motor de anéis
ℂ
𝜔𝑟 0
𝜔𝑠
ℂ𝑚𝑎𝑥 𝑟2 > 𝑟1
ℂ𝑟 cte.
𝑟1 > 0 rotor CC (r = 0)
𝜔1
𝜔2
𝜔3
ℂ𝑟 ∝ 𝜔2
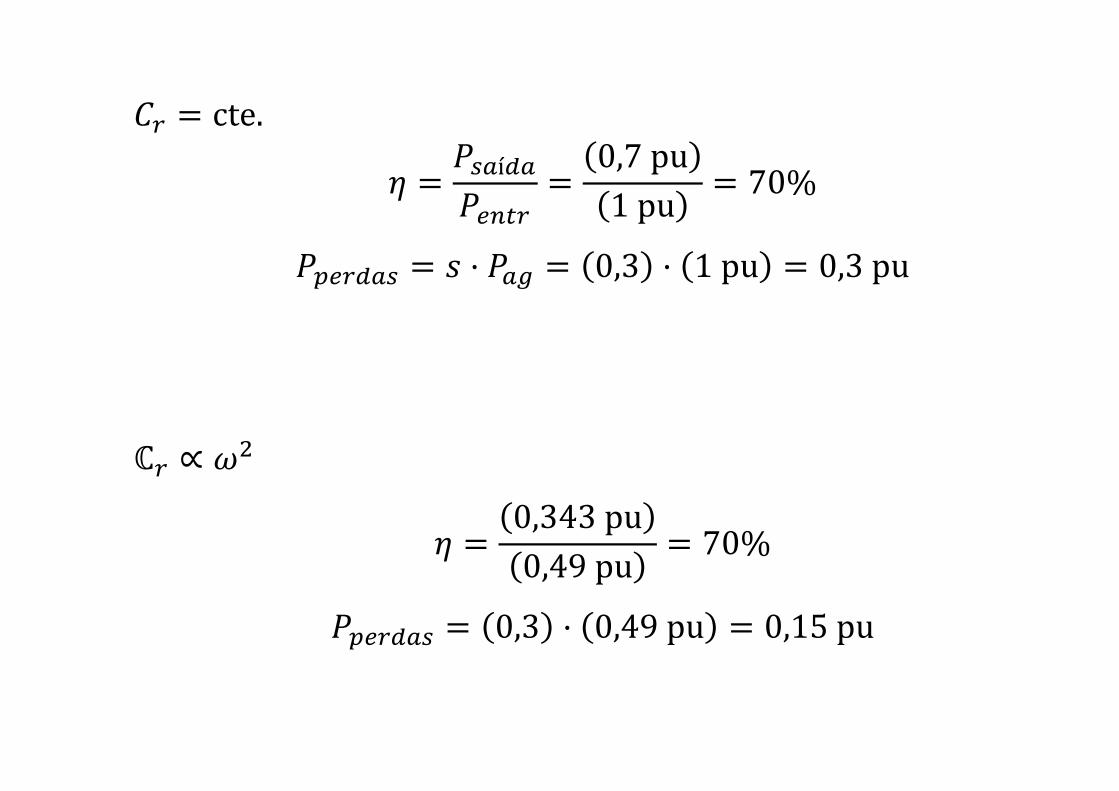
𝐶𝑟 = cte.
𝜂 =𝑃𝑠𝑎í𝑑𝑎𝑃𝑒𝑛𝑡𝑟
=(0,7 pu)
(1 pu)= 70%
𝑃𝑝𝑒𝑟𝑑𝑎𝑠 = 𝑠 · 𝑃𝑎𝑔 = (0,3) · (1 pu) = 0,3 pu
ℂ𝑟 ∝ 𝜔2
𝜂 =(0,343 pu)
(0,49 pu)= 70%
𝑃𝑝𝑒𝑟𝑑𝑎𝑠 = (0,3) · (0,49 pu) = 0,15 pu

(2) Variação de 𝑉𝑎𝑙𝑖𝑚
𝑃𝑎𝑔 = 𝑃𝑒𝑛𝑡𝑟
𝑃𝑠𝑎í𝑑𝑎 = (1 − 𝑠) · 𝑃𝑎𝑔
𝑃𝑒𝑠𝑐𝑜𝑟𝑟 = 𝑠 · 𝑃𝑎𝑔
ℂ
𝜔𝑟 0 𝜔𝑠
ℂ𝑚𝑎𝑥
ℂ𝑟 cte. ℂ𝑟 ∝ 𝜔
2
ℂ ∝ 𝑉2
HARMONICAS NA REDE
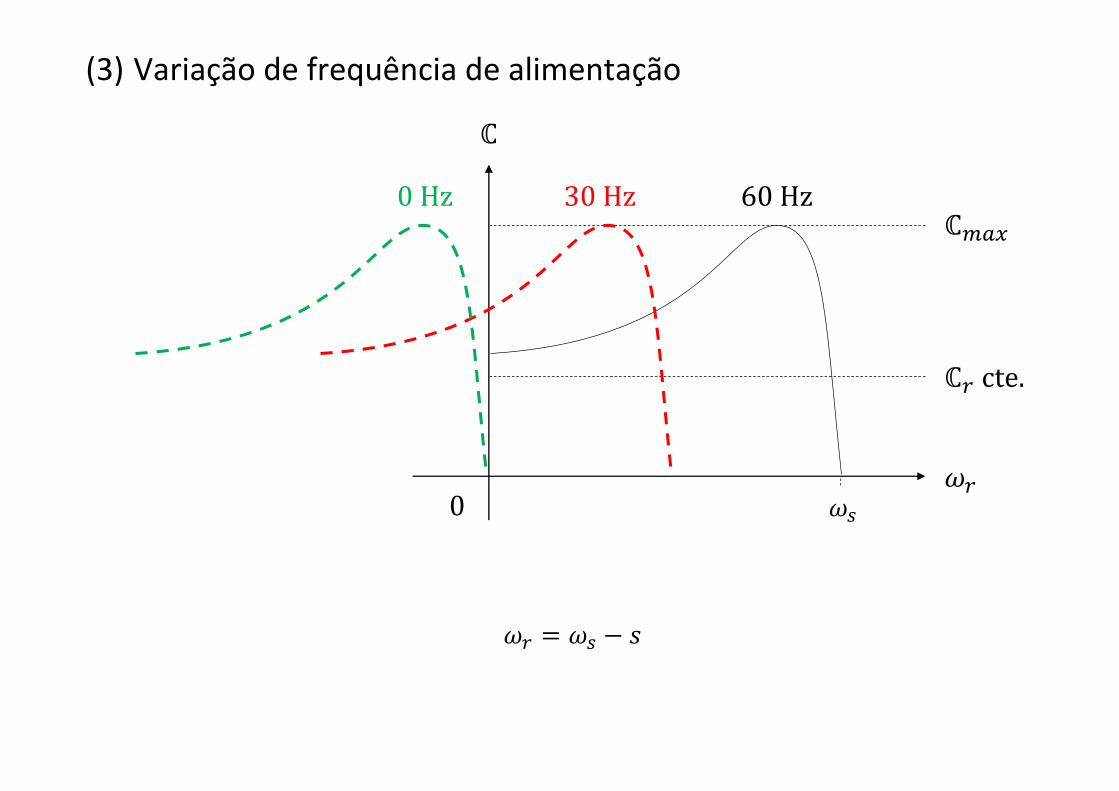
(3) Variação de frequência de alimentação
ℂ
𝜔𝑟 0 𝜔𝑠
ℂ𝑚𝑎𝑥 0 Hz
ℂ𝑟 cte.
30 Hz 60 Hz
𝜔𝑟 = 𝜔𝑠 − 𝑠