Pginas (5):12345Prximo Avaliao do Tpico: 1 2 3 4 5Modo de
Listagem|Modo LinearMeus implementaes
2015/08/25, 17:38(Esta mensagem foi modificada pela ltima vez:
2015/08/25 17:50 porsasa999.)Post:# 1
sasa999Estados-
Mensagens: 65Registrado: Maio de 2015Reputao:4
Meus implementaes
Acrlico + corpo playwood e rodas.Pneus O-ring.Esboo B-Robot
Quase original com pequenas mudanas.Meu maior problema que eu quase
no familiarizados com programao
Auto redefinir fadders TouchOSC(ESP8266 + Leonardo micro.)
2015/08/25, 20:39Post:# 2
jpedrocAdministrator
Mensagens: 48Registrado: Feb 2014Reputao:1
RE: Meus implementaesMuito bom trabalho Sasa!Eu realmente gosto
da nova forma!:-DApenas 2 prateleiras, eu acho que o fundo para os
motores + IMU, ea segunda para as baterias Leonardo + Crebro Robot
+, no ?Voc est usando baterias LIPO?Por favor, sinta-se livre para
compartilhar o layout e OSC cdigo.
2015/08/28, 07:19Post:# 3
KomXJunior Member
Mensagens: 49Registrado: Jun 2015Reputao:0
RE: Meus implementaessasa999,seus programas para Arduino e
ESP8266 no compartilhar?
2015/09/06, 09:17(Esta mensagem foi modificada pela ltima vez:
2015/10/18 10:37 porsasa999.)Post:# 4
sasa999Estados-
Mensagens: 65Registrado: Maio de 2015Reputao:4
RE: Meus implementaes(08-25-2015 20:39)jpedroc Escreveu:Apenas 2
prateleiras, eu acho que o fundo para os motores + IMU, ea segunda
para as baterias Leonardo + Crebro Robot +, no ?Voc est usando LIPO
baterias?H muito espao vazio.
Sim, eu uso muito grande Lipo 2200mAh.Posso us-lo mais de uma
hora
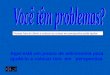
Irmozinho nasceu!D-Robot2
3.7V / 1000mAh LiPoregular 5V Leonardo / PROMICRO funcionar bem
em 3.7V sem qualquer conversor de impulso!Para motores DC / DC
conversor step-up para 10-12VMPU6050 colocado acima de motores, mas
isso no prejudicou a estabilidade do rob.laterais e rodas de
madeira compensada em ngulo.Verso Teste KomX de esboo com mudanas
para as minhas necessidades.Eu no sei por que, mas esta verso rob
executar bem sem todos os anis de ferrite ou clip-on supressores de
rudopossvel usar ESP8266, esp-1 ou ESP- 12 com conversor
2015/10/04, 14:24(Esta mensagem foi modificada pela ltima vez:
2015/10/04 14:32 porsasa999.)Post:# 5
sasa999Estados-
Mensagens: 65Registrado: Maio de 2015Reputao:4
RE: Meus implementaes
D-Robot2 (irmo mais novo) test drive
2015/10/06, 19:35Post:# 6
WampoOuro nvel MAKER
Mensagens: 23Registrado em: Mar 2015Reputao:2
RE: Meus implementaesHey Sasa,bom trabalho.Os seus PIDs so muito
agressivos.Voc mudou alguns valores do motor ou isso o Cdigo
B_Robot original?Greetings from GermanyWampo
2015/10/06, 19:59Post:# 7
sasa999Estados-
Mensagens: 65Registrado: Maio de 2015Reputao:4
RE: Meus implementaes(10-06-2015 19:35)Wampo Escreveu:Hey
Sasa,bom trabalho.Os seus PIDs so muito agressivos.Voc mudou alguns
valores do motor ou isso o Cdigo B_Robot original?Greetings from
GermanyWampo
#define MAX_THROTTLE_PRO 1700#define MAX_STEERING_PRO 300 //
500#define MAX_TARGET_ANGLE_PRO 80 // 120alguma parte do cdigo de
B-Robot, alguns KomX + minhas alteraes
2015/10/07, 22:41(Esta mensagem foi modificada pela ltima vez:
2015/10/07 22:47 porjcfs.)Post:# 8
jcfsJunior Member
Mensagens: 1Registrado em: Oct 2015Reputao:0
RE: Meus implementaesOl Sasa,em primeiro lugar, muito bom
trabalho!Seus robs olhar impressionante.Eu estou tentando construir
um eu mesmo com uma configurao muito semelhante ao seu.Embora eu
estou tendo alguns problemas com meus drivers A4899 - 2 j
queimou.Eu estou usando 2 42BYGHM809 (NEMA 17) motores de passo e
eu tambm estou usando um conversor step-up DC / DC at 12V fornec-lo
para A4899 VMOT - Vref de cerca de 0.6V, que deve estar ok para
meus motores.Qualquer pista de porque os motoristas continuam
queimando?Eu vejo que voc no usa qualquer dissipador de calor na
sua, mas o meu ficar realmente muito quente -? Muita correnteVoc
usa algum capacitor de desacoplamento em vmot para lidar com picos
de energia?Atenciosamente,J
Btw, eu sinto muito para seqestrar seu segmento com perguntas
pessoais
2015/10/08, 07:03Post:# 9
sasa999Estados-
Mensagens: 65Registrado: Maio de 2015Reputao:4
RE: Meus implementaes(10-07-2015 10:41 PM)jcfs Escreveu:Voc usa
algum capacitor de desacoplamento em vmot para lidar com picos de
energia?Eu no sei o que eles so a dissociao ou qualquer outro, mas
capacitores 220uF paralela a cada condutor Vmot / GND.Sem eles
picos pode queimar seu motorista.Meu Vref = 0.7V em ambos os robs e
eu no sei por que meus drivers no muito quente, sem dissipador de
calor na irmozinho.No primeiro rob (maior) drivers esto com
dissipador de calor e ficar bastante quente aps 20-30 min de
conduo.42BYGHW609 motores em ambos os robs.A nica diferena -.
Primeiro rob corrida em 11.1V lipo, mas segundo tem DC-DC step-up
de 3.7V a 12Vtenho DRV8825 - ir testar no fim de semana.Eles tm
1/32 microstepping e maior corrente max.Outro enigma para mim tempo
rob prazo.Bigger rob pode executar 30min.LiPo 11.1V 2200mAh x =
24.4Wh,mas 15min "irmozinho".LiPo 3.7V 1000mAh x = 3.7W.(eficincia
de converso -Step-up 0){cntM1 ++;SET (PORTC, 6);// DIR Motors (a
seguir paraMotor1)}mais{cntM1--;CLR (PORTC, 6);// DIR Motors
(Revers paraMotor1)}OCR1A = OCR1A + period_M1;__asm__
__volatile__("nop""\ n \ t""nop" "\ n \ t""nop" "\ n \ t""nop" " \
n \ t""nop ");SET (PORTE, 6);( PINAGEM D7 .) // STEP MOTOR
1delay_1us ();CLR (PORTE,6);}
em void loop ()
Cdigo:angle_adjusted = dmpGetPhi () - * stepCounter 0,01 -
stepCounterSaved * 0,01;
Cdigo:stepCounter = (cntM1 + cntM2) / 2;if (! acelerador = 0){if
(angleSaved!){stepCounterSaved = stepCounter;angleSaved =1;}cntM1 =
0;cntM2 =0;}mais angleSaved = 0;
- . - stepCounter angle_adjusted 0.2-0.5-1. .
2015/10/09, 18:21Post:# 14
vlelectronicJunior Member
Mensagens: 20Registrado: Apr 2015Reputao:0
RE: Meus implementaesOl Sasa,eu no consigo compilar o cdigo,
onde period_M1 depor?Voc pode enviar um arquivo para .ino:
[email protected] tenho um outro problema, os slides em
contato OSC no retornar automaticamente para soluo zero que me
dar?Eu uso RN-171Obrigadocumprimentos VL
2015/10/09, 23:28Post:# 15
sasa999Estados-
Mensagens: 65Registrado: Maio de 2015Reputao:4
RE: Meus implementaes(10-09-2015 18:21)vlelectronic Escreveu:Eu
no consigo compilar o cdigo, onde period_M1 depor?uint16_t
period_M1, period_M2parte Hardware de cdigo diferente e tem pinagem
diferente tambm.Voc no pode colocar a B-rob brainshield.Escrito por
KomX olhada nestehttp://jjrobots.com/forum/thread-43.html
2015/10/10, 06:27Post:# 16
KomXJunior Member
Mensagens: 49Registrado: Jun 2015Reputao:0
RE: Meus implementaesOi,vlelectronic.Vejo que voc tem perguntas
para o cdigo de adaptar a bordo Sparkfun Pro Micro (tamanho e pin
diferente contagem de Leonardo).Se voc usar o carto Pro Micro, eu
vou ser feliz para discutir estes ou outros problemas.Se voc esto
usando um Leonardo, ensinar o algoritmo novo balanceamento de rob,
voc s precisa adicionar contadores para o subprograma gerando
sinais de controle motor e ignorar variveis que so projetados para
assegurar que o motor est funcionando em um algoritmo e hardware
diferente suporte.
2015/10/13, 12:20Post:# 17
vlelectronicJunior Member
Mensagens: 20Registrado: Apr 2015Reputao:0
RE: Meus implementaesOl KomX,eu comprei Arduino pro micro,
esp12e, a4988 e MPU6050.Eu inteno de construir um novo
rob.Aconselhar-me a colocar no imu como Brobot ou mainboard
principal?Eu recomendo o uso de 3s lipo 1s ou com o passo-up?Eu
desejo que o rob est sempre em equilbrio, adicionando pesos.Voc
pode ver a tenso da bateria em smartphones?Refere Vito
2015/10/13, 13:16Post:# 18
KomXJunior Member
Mensagens: 49Registrado: Jun 2015Reputao:0
RE: Meus implementaesOi, Vito.(10-13-2015 12:20)vlelectronic
Escreveu:Eu comprei Arduino pro micro, esp12e, a4988 e MPU6050.Eu
inteno de construir um novo rob.
Ao selecionar esta configurao, voc precisar usar o cdigo
modificado.Por favor, olhe estasmensagens.Se voc estiver
interessado, eu vou ser um escravo para responder s suas perguntas
no tpico.Citao:Aconselhar-me a colocar no imu como Brobot ou
mainboard principal?Eu recomendo usar 3s lipo 1s ou com o
passo-up?
A primeira pergunta no compreendido.Tente estend-lo.Em matria de
configurao das baterias difcil aconselhar nada. mais barato usar
uma bateria 3S e reduzindo os circuitos integrados de tenso.Neste
caso, no entanto, necessrio para controlar a tenso em todos os trs
bancos de bateria separadamente.Se voc escolher esta opo ir
escrever a manuteno do cdigo.Uma opo mais cara
oferecidasasa999(verpost).Eu uso uma bateria de 3,7 volt em e
conversores DC / DC (de 1 e 2 para baixo).Neste caso, mais fcil de
carregar (usando um carregador 5V, 2A) e no h No h necessidade de
equalizar a carga nos bancos de baterias.
Citao:Eu desejo que o rob est sempre em equilbrio, adicionando
pesos.
Como eu sei,sasa999props alteraes ao cdigo para permitir que o
rob para equilibrar o peso adicional, mas apenas no modo de
paragem.Eu acho que o autor dessa idia e implementa-lo em
movimento.Citao:Voc pode ver a tenso da bateria em smartphones?
Do mesmo modo acima.O trabalho final a implementao de uma
comunicao bidirecional com um smartphone eu no vi.Alguns
desenvolvimentos tmsasa999.Como parece para mim, o nvel de controle
sobre a bateria do smartphone pode ser realizado com "LED"
colorido.Atenciosamente, Oleg.
2015/10/13, 13:27Post:# 19
vlelectronicJunior Member
Mensagens: 20Registrado: Apr 2015Reputao:0
RE: Meus implementaesOl KomX,"Aconselhar-me a colocar na UE como
um rob ou placa principal?"Eu quero dizer que melhor para colocar o
imu longe dos motores ou mont-lo em Brobot original?Desculpe, mas
eu usar um tradutor!Respeita Vito
2015/10/13, 13:44Post:# 20
KomXJunior Member
Mensagens: 49Registrado: Jun 2015Reputao:0
RE: Meus implementaes(10-13-2015 13:27)vlelectronic
Escreveu:quero dizer que melhor colocar os imu longe dos motores ou
mont-lo em Brobot original?
Uma vez que no usar acelerao, mas apenas de uma alterao no
ngulo, o sensor de posio no crtica.Voc pode colocar em qualquer
lugar.Citao:Desculpe, mas eu usar um tradutor!
Eu tambm uso um tradutor russo.
Pesquisa Lista de Usurios Calendrio SocorroHorrio
atual:2015/12/08, 23:47de volta Bem-vindo,bonifacio valmor
deMello.A sua ltima visita: Hoje, 22:56(CPUsurio-LogOut)Abrir a
lista de amigosVer novas mensagens|Posts de Hoje|Mensagens
Privadas(no lido 0, Total 0)
JJRobots COMUNIDADE/JJrobots/B-rob/Meus implementaes
Pginas (5):Anterior12345PrximoAvaliao do Tpico: 1 2 3 4 5Modo de
Listagem|Modo LinearMeus implementaes
2015/10/13, 17:05Post:# 21
sasa999Estados-
Mensagens: 65Registrado: Maio de 2015Reputao:4
RE: Meus implementaes(10-13-2015 12:20)vlelectronic Escreveu:Voc
pode ver a tenso da bateria em smartphones?Sim.Voc pode ver tenso
como dgitos e / ou tenso como FadderCdigo:// Teste para tempos de
atraso// No layout OSC adicionar fadder3vazio . out, 9000 em
//AT+CIPSTART=1,"UDP","192.168.4.2",9001,9000,0 delay(1000);}void
loop (){sendToOSC ("/ 1 / fader3", bateria) ; //
bateriafloat,}vazio sendToOSC (char * adr, flutuar val){// mensagem
como esta ..... / 1 / endereo /, f xxxx Serial1.println ("AT +
CIPSEND = 20");Serial1 .print (ADR); if (adr == "/ 1 / fader1" ||
adr == "/ 1 / push1" || adr == "/ 1 / toggle1") {intcnt = 12 -
strlen (ADR) ; for (int i = 0; i 15){cnt = 0;danceStart =
0;steering = 0,0;finalStart =1;}}
Turn - basta virar sem direo FadderREV - mudana dianteira e
traseira, motor = -veculosStop - ajustar tudo para zero ou neutro e
redefinir fadders no OSC (se no for usada a funo de AutiReset OSC
TouchMessages (/ z)))On / Off - wake-up e se elevam-up robotbotes
de alternncia 1, 2 e 3 (em cima) para falar, luzes UTC.Costumo
us-los para testar diferentes cdigos / modos / setiings ...Voc pode
v-los todos em vdeo
2015/10/13, 18:56Post:# 24
vlelectronicJunior Member
Mensagens: 20Registrado: Apr 2015Reputao:0
RE: Meus implementaesOl Sasa 999,Tente alterar a extenso de
BROBOT.touchosc para BROBOT.txt, voc tambm pode anexar o arquivo
.ino?Refere Vito
2015/10/13, 18:58(Esta mensagem foi modificada pela ltima vez:
2015/10/13 18:58 porKomX.)Post:# 25
KomXJunior Member
Mensagens: 49Registrado: Jun 2015Reputao:0
RE: Meus implementaes(10-13-2015 18:24)sasa999
Escreveu:(10-13-2015 17:27)KomX Escreveu: :. "HA-HA", "PIRUET",
"DANCE", "Turn", "REV" 2 .
Eu tentei anexar arquivo * .touchosc, mas algo est errado com
attachementstenho esse " O tipo de arquivo que voc anexado no
permitido Por favor, retire o acessrio ou escolher um tipo
diferente.".Code - nada srio -. Apenas por diversohaha - apenas
haos
Cdigo:#include vazio Haha (){for (uint8_t i = 0; i
MAX_PIRUET_STEERING) piruetEnding = 1;}mais{direo =
piruetSteering;timePrev = timePiruet;piruetSteering - = 15;if
(piruetSteering stepLenght){direo = DANCE_STEERING * chacha1
[CNT];timePrev = timeDance;cnt++;}if (cnt> 15){cnt =
0;danceStart = 0;steering = 0,0;finalStart =1;}}
Turn - basta virar sem direo FadderREV - mudana dianteira e
traseira, motor = -veculosStop - ajustar tudo para zero ou neutro e
redefinir fadders no OSC (se no for usada a funo de AutiReset OSC
TouchMessages (/ z)))On / Off - wake-up e se elevam-up robotbotes
de alternncia 1, 2 e 3 (em cima) para falar, luzes UTC.Costumo
us-los para testar diferentes cdigos / modos / setiings ...Voc pode
v-los todos em vdeo
2015/10/13, 18:58(Esta mensagem foi modificada pela ltima vez:
2015/10/13 20:00 porsasa999.)Post:# 26
sasa999Estados-
Mensagens: 65Registrado: Maio de 2015Reputao:4
RE: Meus implementaes(10-13-2015 13:16)KomX Escreveu:Como eu
sei,sasa999alteraes propostas ao cdigo para permitir que o rob para
equilibrar o peso adicional, mas apenas no modo de paragem.NO!Ele
pode dirigir tambm!Ele usa ngulo erro salvo.nica limitao - no
permitido adicionar ou remover peso quando a unidade rob para a
frente ou para trs...H meu layout OSCTerceira pgina ainda no
concludo - ser para rob falando!!* .touchosc.txt mudar para *
.touchosc
Arquivos anexados)D-Robot_inv5.5_zero.touchosc.txt(Tamanho: 2,35
KB / Transferncias: 23)
2015/10/13, 19:06(Esta mensagem foi modificada pela ltima vez:
2015/10/13 19:07 porKomX.)Post:# 27
KomXJunior Member
Mensagens: 49Registrado: Jun 2015Reputao:0
RE: Meus implementaes(10-13-2015 18:58)sasa999
Escreveu:(10-13-2015 13:16)KomX Escreveu:Como eu
sei,sasa999alteraes propostas ao cdigo para permitir que o rob para
equilibrar o peso adicional, mas apenas no modo de paragem.NO!Ele
pode dirigir tambm!Ele usa ngulo erro salvo.nica limitao - no
permitido adicionar ou remover peso quando a unidade rob para a
frente ou para trs.
mille perdo!
2015/10/13, 19:26Post:# 28
vlelectronicJunior Member
Mensagens: 20Registrado: Apr 2015Reputao:0
RE: Meus implementaesOl Sasa 999,O arquivo no funciona ele ser
danificado alguma coisa.Voc pode coloc-lo em um arquivo zip ou
rar?Obrigadocumprimentos VL
2015/10/13, 20:05(Esta mensagem foi modificada pela ltima vez:
2015/10/13 20:24 porsasa999.)Post:# 29
sasa999Estados-
Mensagens: 65Registrado: Maio de 2015Reputao:4
RE: Meus implementaes(10-13-2015 19:26)vlelectronic Escreveu:Ol
Sasa 999,O arquivo no funciona ele ser danificado alguma coisa.Voc
pode coloc-lo em um arquivo zip ou rar?Obrigadocumprimentos
VLrecarregado e verificado.No abra como arquivo de texto!Clique
direito - save - remover extenso de arquivo (ltimos 3 letras e
ponto)deve serD-Robot_inv5.5_zero.touchosc.Ps no vai funcionar com
o esboo original B-rob porque os valores so fader1 e fader2
changed..sorry!se voc gosta deste layout, voc deve alterar fadders
faixa de valor para 0-1 e no usar TouchMessages (/ z) antes que voc
no mudou cdigo JJROBOTS_OSC para eles.pps AutoReset e funes RST
(pgina 2) no ir funcionar com cdigo B-rob original, porque esta a
funo de ESP8266 replay.No suportado em ESP8266 AT modo de
comando.Mas voc pode escrever um cdigo e enviar mensagens de reset
de Leonardo ou MicroPro como informaes da bateria.
2015/10/14, 19:18Post:# 30
vlelectronicJunior Member
Mensagens: 20Registrado: Apr 2015Reputao:0
RE: Meus implementaesOl Sasa 999,Voc pode anexar seu arquivo ini
com as suas bibliotecas?Obrigadocumprimentos VL
Pesquisa Lista de Usurios Calendrio SocorroHorrio
atual:2015/12/08, 23:56de volta Bem-vindo,bonifacio valmor
deMello.A sua ltima visita: Hoje, 22:56(CPUsurio-LogOut)Abrir a
lista de amigosVer novas mensagens|Posts de Hoje|Mensagens
Privadas(no lido 0, Total 0)
JJRobots COMUNIDADE/JJrobots/B-rob/Meus implementaes
Pginas (5):Anterior12345PrximoAvaliao do Tpico: 1 2 3 4 5Modo de
Listagem|Modo LinearMeus implementaes
2015/10/14, 19:46(Esta mensagem foi modificada pela ltima vez:
2015/10/14 19:48 porsasa999.)Post:# 31
sasa999Estados-
Mensagens: 65Registrado: Maio de 2015Reputao:4
RE: Meus implementaes(10-14-2015 19:18)vlelectronic Escreveu:Voc
pode anexar seu arquivo ini com as suas bibliotecas?Eu uso KomX
esboo com algumas mudanas para ESP8266 (eu uso ESP8266 brilharam
com meu prprio cdigo) e as configuraes de PID mais agressivas.No
agora eu ter excludo funes quase todos adicionados e Sonar e servo
e som / voz tambm, porque eu no tenho espao suficiente para uma
conduo mais avanada e cdigo de equilbrio.Assim voc pode usar KomX
esboo como plataforma de incio.
2015/10/17, 23:09(Esta mensagem foi modificada pela ltima vez:
2015/12/06 12:39 porsasa999.)Post:# 32
sasa999Estados-
Mensagens: 65Registrado: Maio de 2015Reputao:4
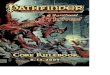
RE: Meus implementaesMeu prximo D-Robot3 vai ser um pouco
diferente - com placa de controle muito pequeno, sem Leonardo ou
MicroProAgora, olhando para steppers menores, com torque
suficiente.Se eu vou encontr-los em 3.5V, vou mudar para drv8834
driver (faixa de tenso de 2,5-10,8 V de alimentao) e ser executado
em 1s LiPo ou Li-ion sem reforo de step-uppor qu?Olhe para este
vdeo ...desculpe, mas alguns dispositivos mveis no pode mostrar na
tela notas Youtube neste vdeo
No me pergunte como, porque a escola que eu pouco estudada,
portanto, de fsica e programao eu no bem compreendido, mas talvez
seja por isso que eu tento fazer coisas que parecem
impossveis.Traduo do Google
2015/10/18, 10:33(Esta mensagem foi modificada pela ltima vez:
2015/10/18 11:01 porsasa999.)Post:# 33
sasa999Estados-
Mensagens: 65Registrado: Maio de 2015Reputao:4
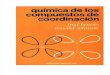
RE: Meus implementaesPlaca D-Robot4 com mais avanado STM32, um
de 32 bits ARM Cortex M3 microprocessadorGraas a Komx para
recomendaes.O upload muito amostra por USB.Testado com cdigo
KomX.Ele funciona!Por enquanto eu comecei a escrever alteraes no
cdigo temporizador para motores, dois servos e medidor de voltagem
da bateria.Espero KomX vai me ajudar
2015/10/18, 12:18(Esta mensagem foi modificada pela ltima vez:
2015/10/18 12:19 porKomX.)Post:# 34
KomXJunior Member
Mensagens: 49Registrado: Jun 2015Reputao:0
RE: Meus implementaes- ... !!! "" :... Espaol Ir . , .
2015/10/29, 23:03Post:# 35
jpedrocAdministrator
Mensagens: 48Registrado: Feb 2014Reputao:1
RE: Meus implementaesObrigado Sasa para sua idia sobre os
controles "auto de reinicializao" no toque OSC APP.Ns
implementamos-los na nova verso do Layout (eo status da bateria)
;-)
2015/11/20, 08:54Post:# 36
dariukasdJunior Member
Mensagens: 2Registrado em: Nov 2015Reputao:0
RE: Meus implementaes(10-13-2015 18:24)sasa999 Escreveu:Turn -
basta virar sem direo FadderREV - mudana dianteira e traseira,
motor = -veculosStop - ajustar tudo para zero ou neutro e redefinir
fadders no OSC (se no for usado AutiReset funo de OSC TouchMessages
(/ z)))On / Off - wake-up e se elevam-up robotbotes de alternncia
1, 2 e 3 (em cima) para falar, luzes UTC.Costumo us-los para testar
diferentes cdigos / modos / setiings ...Voc pode v-los todos em
vdeo
Ol sasa999,eu estou muito interessado em ascenso rob-up sem
mo.Poderia explicar o que o cdigo de ter alterado a subir-up rob
como eu entendo com o boto On / Off de imprensa?
2015/11/20, 16:34(Esta mensagem foi modificada pela ltima vez:
2015/11/20 16:38 porsasa999.)Post:# 37
sasa999Estados-
Mensagens: 65Registrado: Maio de 2015Reputao:4
RE: Meus implementaesRemova esta linha ou aumentar o ngulo para
Riseup.Por exemplo, em vez de 74 120 e seu rob vai Riseup themself
imediatamente aps a calibrao giroscpioCdigo:if ((angle_adjusted
-74))
Voc deve ter motores energia suficiente para Riseup
2015/11/20, 19:10Post:# 38
dariukasdJunior Member
Mensagens: 2Registrado em: Nov 2015Reputao:0
RE: Meus implementaesSim, agora eu entendo porque s vezes os
meus motores apenas fazer barulho, mas no girar rodas ... Deve ser
eles no so poderosos o suficiente.No comeo eu pensei que eles esto
quebrados.Agora eu sei - eu vou precisar brao para cima ou para
ascenso de novos motores mais potentesMeus motores momento esttico
2,7 kg / cm, momento de inrcia: 34g.cm.Voc poderia aconselhar o
motor deve ser suficiente para a ascenso acima?
2015/11/20, 23:26Post:# 39
sasa999Estados-
Mensagens: 65Registrado: Maio de 2015Reputao:4
RE: Meus implementaes(11-20-2015 19:10)dariukasd Escreveu:Voc
poderia aconselhar o motor deve ser suficiente para a ascenso
acima?Depende de seu rob equilbrio global, peso total, tamanho da
roda, atual max, bateria etc.
2015/12/06, 09:33Post:# 40
2hryJunior Member
Mensagens: 1Registrado em: Dec 2015Reputao:0
RE: Meus implementaes@ Sasa999bom trabalho.Qualquer notcia sobre
reescrever os temporizadores para STM32?
Parte superior do formulrioParte inferior do formulrioPrximo
mais antigo|Prximo maisnovo
Pginas (5):Anterior12345Prximo
Pesquisa Lista de Usurios Calendrio SocorroHorrio
atual:2015/12/09, 00:09de volta Bem-vindo,bonifacio valmor
deMello.A sua ltima visita: Ontem, 22:56(CPUsurio-LogOut)Abrir a
lista de amigosVer novas mensagens|Posts de Hoje|Mensagens
Privadas(no lido 0, Total 0)
JJRobots COMUNIDADE/JJrobots/B-rob/Meus implementaes
Pginas (5):Anterior12345PrximoAvaliao do Tpico: 1 2 3 4 5Modo de
Listagem|Modo LinearMeus implementaes
2015/10/14, 19:46(Esta mensagem foi modificada pela ltima vez:
2015/10/14 19:48 porsasa999.)Post:# 31
sasa999Estados-
Mensagens: 65Registrado: Maio de 2015Reputao:4
RE: Meus implementaes(10-14-2015 19:18)vlelectronic Escreveu:Voc
pode anexar seu arquivo ini com as suas bibliotecas?Eu uso KomX
esboo com algumas mudanas para ESP8266 (eu uso ESP8266 brilharam
com meu prprio cdigo) e as configuraes de PID mais agressivas.No
agora eu ter excludo funes quase todos adicionados e Sonar e servo
e som / voz tambm, porque eu no tenho espao suficiente para uma
conduo mais avanada e cdigo de equilbrio.Assim voc pode usar KomX
esboo como plataforma de incio.
2015/10/17, 23:09(Esta mensagem foi modificada pela ltima vez:
2015/12/06 12:39 porsasa999.)Post:# 32
sasa999Estados-
Mensagens: 65Registrado: Maio de 2015Reputao:4
RE: Meus implementaesMeu prximo D-Robot3 vai ser um pouco
diferente - com placa de controle muito pequeno, sem Leonardo ou
MicroProAgora, olhando para steppers menores, com torque
suficiente.Se eu vou encontr-los em 3.5V, vou mudar para drv8834
driver (faixa de tenso de 2,5-10,8 V de alimentao) e ser executado
em 1s LiPo ou Li-ion sem reforo de step-uppor qu?Olhe para este
vdeo ...desculpe, mas alguns dispositivos mveis no pode mostrar na
tela notas Youtube neste vdeo
No me pergunte como, porque a escola que eu pouco estudada,
portanto, de fsica e programao eu no bem compreendido, mas talvez
seja por isso que eu tento fazer coisas que parecem
impossveis.Traduo do Google
2015/10/18, 10:33(Esta mensagem foi modificada pela ltima vez:
2015/10/18 11:01 porsasa999.)Post:# 33
sasa999Estados-
Mensagens: 65Registrado: Maio de 2015Reputao:4
RE: Meus implementaesPlaca D-Robot4 com mais avanado STM32, um
de 32 bits ARM Cortex M3 microprocessadorGraas a Komx para
recomendaes.O upload muito amostra por USB.Testado com cdigo
KomX.Ele funciona!Por enquanto eu comecei a escrever alteraes no
cdigo temporizador para motores, dois servos e medidor de voltagem
da bateria.Espero KomX vai me ajudar
2015/10/18, 12:18(Esta mensagem foi modificada pela ltima vez:
2015/10/18 12:19 porKomX.)Post:# 34
KomXJunior Member
Mensagens: 49Registrado: Jun 2015Reputao:0
RE: Meus implementaes- ... !!! "" :... Espaol Ir . , .
2015/10/29, 23:03Post:# 35
jpedrocAdministrator
Mensagens: 48Registrado: Feb 2014Reputao:1
RE: Meus implementaesObrigado Sasa para sua idia sobre os
controles "auto de reinicializao" no toque OSC APP.Ns
implementamos-los na nova verso do Layout (eo status da bateria)
;-)
2015/11/20, 08:54Post:# 36
dariukasdJunior Member
Mensagens: 2Registrado em: Nov 2015Reputao:0
RE: Meus implementaes(10-13-2015 18:24)sasa999 Escreveu:Turn -
basta virar sem direo FadderREV - mudana dianteira e traseira,
motor = -veculosStop - ajustar tudo para zero ou neutro e redefinir
fadders no OSC (se no for usado AutiReset funo de OSC TouchMessages
(/ z)))On / Off - wake-up e se elevam-up robotbotes de alternncia
1, 2 e 3 (em cima) para falar, luzes UTC.Costumo us-los para testar
diferentes cdigos / modos / setiings ...Voc pode v-los todos em
vdeo
Ol sasa999,eu estou muito interessado em ascenso rob-up sem
mo.Poderia explicar o que o cdigo de ter alterado a subir-up rob
como eu entendo com o boto On / Off de imprensa?
2015/11/20, 16:34(Esta mensagem foi modificada pela ltima vez:
2015/11/20 16:38 porsasa999.)Post:# 37
sasa999Estados-
Mensagens: 65Registrado: Maio de 2015Reputao:4
RE: Meus implementaesRemova esta linha ou aumentar o ngulo para
Riseup.Por exemplo, em vez de 74 120 e seu rob vai Riseup themself
imediatamente aps a calibrao giroscpioCdigo:if ((angle_adjusted
-74))
Voc deve ter motores energia suficiente para Riseup
2015/11/20, 19:10Post:# 38
dariukasdJunior Member
Mensagens: 2Registrado em: Nov 2015Reputao:0
RE: Meus implementaesSim, agora eu entendo porque s vezes os
meus motores apenas fazer barulho, mas no girar rodas ... Deve ser
eles no so poderosos o suficiente.No comeo eu pensei que eles esto
quebrados.Agora eu sei - eu vou precisar brao para cima ou para
ascenso de novos motores mais potentesMeus motores momento esttico
2,7 kg / cm, momento de inrcia: 34g.cm.Voc poderia aconselhar o
motor deve ser suficiente para a ascenso acima?
2015/11/20, 23:26Post:# 39
sasa999Estados-
Mensagens: 65Registrado: Maio de 2015Reputao:4
RE: Meus implementaes(11-20-2015 19:10)dariukasd Escreveu:Voc
poderia aconselhar o motor deve ser suficiente para a ascenso
acima?Depende de seu rob equilbrio global, peso total, tamanho da
roda, atual max, bateria etc.
2015/12/06, 09:33Post:# 40
2hryJunior Member
Mensagens: 1Registrado em: Dec 2015Reputao:0
RE: Meus implementaes@ Sasa999bom trabalho.Qualquer notcia sobre
reescrever os temporizadores para STM32?
Parte superior do formulrioParte inferior do formulrioPrximo
mais antigo|Prximo maisnovo
Pginas (5):Anterior12345Prximo
Pesquisa Lista de Usurios Calendrio SocorroHorrio
atual:2015/12/09, 00:18de volta Bem-vindo,bonifacio valmor
deMello.A sua ltima visita: Ontem, 22:56(CPUsurio-LogOut)Abrir a
lista de amigosVer novas mensagens|Posts de Hoje|Mensagens
Privadas(no lido 0, Total 0)
JJRobots COMUNIDADE/JJrobots/B-rob/Meus implementaes
Pginas (5):Anterior12345Avaliao do Tpico: 1 2 3 4 5Modo de
Listagem|Modo LinearMeus implementaes
2015/12/06, 12:56(Esta mensagem foi modificada pela ltima vez:
2015/12/06 12:57 porsasa999.)Post:# 41
sasa999Estados-
Mensagens: 65Registrado: Maio de 2015Reputao:4
RE: Meus implementaes(12-06-2015 09:33)2hry Escreveu:Qualquer
notcia sobre reescrever os temporizadores para STM32?Infelizmente,
no momento eu tenho muito pouco tempo para este hobby.Ele ainda no
est completo irmozinho D-Robot_3 sem Leonardo ou
MicroPro.Http://jjrobots.com/forum/thread-738-pos...ml#pid1052Por
agora eu tenho duas placas de teste.Um muito pequeno -. Apenas dois
motoristas, MPU e espSegunda pouco maior - sada com essa drv8825
momento ou a4988 drivers (no ordenados drv8834 ainda), mdulo de som
e conectores / para 4 servo motores e luzes LED.SPI pode ser usado
para o futuro expansoSTM32 ser o prximo
Parte superior do formulrioParte inferior do formulrioPrximo
mais antigo|Prximo maisnovo
Pginas (5):Anterior12345