Embed Size (px)
Citation preview

Universidade Estadual de CampinasINSTITUTO DE MATEMÁTICA, ESTATÍSTICA E COMPUTAÇÃO
CIENTÍFICA
DEPARTAMENTO DE MATEMÁTICA
A Dinâmica por trás da Seqüência Espectral
Mariana Rodrigues da Silveira
Doutorado em Matemática
Orientadora: Profa. Dra. Ketty Abaroa de Rezende
Campinas - 2008

Resumo
Neste trabalho, apresentamos um algoritmo para um complexo de cadeias C e sua diferen-
cial dada por uma matriz de conexão ∆ que determina uma seqüência espectral associada
(Er, dr). Mais especi�camente, um sistema gerador de Er em termos da base original de C
é obtido bem como a identi�cação de todas as diferenciais drp : Er
p → Erp−r. Explorando a
implicação dinâmica da diferencial não nula, mostramos a existência de um caminho unindo
a singularidade que gera E0p e a singularidade que gera E0
p−r no caso em que a conexão direta
pelo �uxo não existe. Este caminho é composto pela justaposição de órbitas do �uxo e do
�uxo reverso e prova ser importante em algumas aplicações.

Abstract
In this work, we present an algorithm for a chain complex C and its di�erential given by
a connection matrix ∆ which determines an associated spectral sequence (Er, dr). More
speci�cally, a system spanning Er in terms of the original basis of C is obtained as well as
the identi�cation of all di�erentials drp : Er
p → Erp−r. In exploring the dynamical implication
of a nonzero di�erential, we prove the existence of a path joining the singularities generating
E0p and E0
p−r in the case that a direct connection by a �ow line does not exist. This path
is made up of juxtaposed orbits of the �ow and of the reverse �ow and which proves to be
important in some applications.

Sumário
Introdução iii
1 Preliminares - Teoria de Conley e Seqüências Espectrais 1
1.1 Fluxos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Ordens parciais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3 Índice de Conley . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.4 Decomposição de Morse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.5 Continuação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.6 Matriz de Conexão . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.6.1 Matriz de conexão do Par atrator-repulsor . . . . . . . . . . . . . . . 12
1.6.2 Matriz de conexão para decomposições de Morse . . . . . . . . . . . . 15
1.6.3 Connection matrix in Morse �ows . . . . . . . . . . . . . . . . . . . . 28
1.7 Seqüências Espectrais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
1.7.1 De�nição e propriedades básicas . . . . . . . . . . . . . . . . . . . . . 35
1.7.2 Seqüência Espectral num complexo de cadeias �ltrado . . . . . . . . . 38
2 Método da Varredura 41
2.1 Contextualização . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
2.2 Construção da família ∆r . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
2.3 Propriedades de ∆r . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
3 Os Módulos Erp da Seqüência Espectral 63
i

ii
3.0.1 Filtrações mais grossas . . . . . . . . . . . . . . . . . . . . . . . . . . 73
4 As Diferenciais da Seqüência Espectral 77
5 Análise da Seqüência Espectral para a existência de órbitas conectantes 90
6 Conclusão 101
Referências . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110

Introdução
O papel de técnicas algébricas e topológicas em sistemas dinâmicos tem sido muito signi�-
cativo, como se pode comprovar com a teoria de Lusternik-Schnirelmann, a teoria de Morse,
e mais recentemente a teoria de Conley. A teoria de Conley está amplamente difundida em
trabalhos como [Co], [F1], [F2], [Sa1] e [Sa2].
Um resultado fundamental da teoria de Conley é que todo �uxo em um espaço métrico
compacto pode ser decomposto em uma parte recorrente por cadeias e uma parte do tipo
gradiente. O conjunto recorrente por cadeias é um conjunto compacto invariante que contém
o conjunto não errante e os pontos que se tornam recorrentes quando pequenos erros são
introduzidos no �uxo. Na parte restante do espaço o �uxo é do tipo gradiente, ou seja, existe
uma função de Lyapunov contínua que é estritamente decrescente nas órbitas que não estão
no conjunto recorrente por cadeias. Se as componentes do conjunto recorrente por cadeias
são identi�cadas a pontos, o espaço quociente é do tipo gradiente. Portanto, o problema
de fornecer uma descrição qualitativa do �uxo se divide em duas partes, a descrição das
componentes do conjunto recorrente por cadeias e a descrição de como tais componentes se
conectam umas as outra.
Na teoria de Conley utiliza-se a noção de decomposição de Morse de um conjunto in-
variante isolado S. Uma decomposição de Morse de S é uma coleção �nita de conjuntos
invariantes compactos disjuntos, chamados conjuntos de Morse, cuja união contém o con-
junto recorrente por cadeias de S. Uma vez que uma decomposição de Morse é �xada, os
conjuntos de Morse são descritos pelo índice de Conley, que fornece uma descrição topológica
da dinâmica local. A conexão entre conjuntos de Morse pode ser encontrada construindo-se
iii

iv
�ltrações com conjuntos positivamente invariantes e estudando a topologia destes conjuntos.
A teoria de matrizes de conexão é uma ferramenta importante nesse estudo. Esta teoria está
desenvolvida em [Fr1], [Fr2] e [Fr3]. As entradas da matriz de conexão registram a existência
de órbitas conectantes em ϕ. Dada uma decomposição de Morse com m conjuntos de Morse,
a matriz de conexão é uma matriz m×m cujas entradas são homomor�smos entre os índices
homológicos de Conley associados aos conjuntos de Morse. Essas aplicações são de�nidas
por seqüências exatas em homologia.
O objetivo deste trabalho é começar a explorar uma ferramenta algébrica chamada
seqüência espectral no contexto em que descrevemos acima. Explorar a informação dinâ-
mica dada pela seqüencia espectral de Conley é uma abordagem nova, apesar de existirem
trabalhos utilizando seqüências espectrais de Morse, veja [C2] e [C1], bem como em teoria
de Floer, veja [BaC], onde a utilização é bem diferente da encontrada em nosso trabalho.
Para entender como funciona esta ferramenta em nosso contexto lembremos que, usando
pares atrator-repulsor apropriados, decompomos S em conjuntos de Morse cada vez "me-
nores". A idéia por trás desta abordagem é que ao entender a dinâmica em conjuntos
menores podemos utilizar esta informação para entender conjuntos mais complicados obti-
dos conectando conjuntos de Morse via órbitas cada vez mais longas. Do ponto de vista
algébrico-topológico, este processo se parece muito com aquele codi�cado algebricamente
pelas seqüências espectrais.
As seqüências espectrais foram introduzidas por Leray nos anos 50 e são extensivamente
usadas em álgebra homológica, topologia e geometria algébrica. Podemos de�nir uma seqüên-
cia espectral para um complexo de cadeia (C, ∂) com uma �ltração crescente F pC tal que
∂(F pC) ⊂ F pC e F−1C = 0, ver [Sp]. A seqüência espectral associada a C é uma seqüência
de módulos bigraduados (Er, dr) onde dr tem bi-grau (−r, r − 1) e cada etapa contém in-
formação sobre diferenciais cada vez mais longas. Em outras palavras, a queda em �ltração
vai aumentando a medida que r cresce. A diferencial d0 do complexo é a parte de ∂ que não
decresce na �ltração, d1 diz respeito à parte de ∂ que reduz a �ltração por não mais do que
um e assim por diante. Temos ainda que H(Er, dr) = Er+1.
Neste trabalho consideramos um �uxo e uma função de Lyapunov associada produzindo

v
uma �ltração apropriada. O interessante é que agora as seqüências espectrais não são mais
apenas ferramentas para cálculo, mas sim interessantes objetos por si próprios. As suas
diferenciais mais altas codi�cam algebricamente informações signi�cantes nas trajetórias
"longas" do sistema. Esta forma de ver seqüências espectrais pode também ser encontrada
em [C3] e [BaC].
Dois pontos são abordados. O primeiro consiste na detecção de ciclos. Mais precisa-
mente, os geradores do complexo C mencionado acima são especí�cos, por exemplo, são
singularidades no caso Morse. O domínio Erp,q de dr
p,q, com p+ q = k, é um certo quociente
de um sub-módulo de C. Elementos deste domínio são representados por elementos de C
chamados k-ciclos, cujas classes apropriadas estão no núcleo de todas as diferenciais anteri-
ores ds, s < r. Encontrar um sistema de k-ciclos que gerem Er em termos da base original
de C é não trivial na prática, mas é necessário em aplicações, por exemplo, em topologia
simplética, veja [L]. Neste trabalho desenvolvemos um algoritmo de varredura que produz
esse sistema de geradores. No Teorema 3.0.6 mostramos que os espaços Er são determinados
aplicando-se o método da varredura à matriz de conexão associada ao �uxo.
O segundo ponto é uma outra aplicação do método da varredura. Assumindo que nessa
"seqüência espectral dinâmica" possamos identi�car uma diferencial não nula longa, quais
as conseqüências que isso pode acarretar? É verdade que neste caso existem "órbitas longas"
entre um conjunto invariante e um outro distante? Não é difícil ver que isto não é verdade
em geral, ou seja, nem sempre existem órbitas conectando conjuntos invariantes. No en-
tanto, mostramos no Teorema 5.0.16 que, associado a uma diferencial não nula da seqüência
espectral, existe um caminho unindo dois conjuntos invariantes. Este caminho é constituído
de curvas que coincidem com as linhas de �uxo, onde alguns de seus arcos correspondem a
linhas do �uxo reverso. Este resultado é chamado de Teorema do Zig-Zag. Isto é importante
porque órbitas longas têm alta energia, ou seja, a variação do funcional ação ao longo de
uma órbita é grande. Detectar órbitas com alta energia é signi�cante geometricamente, veja
[BaC].
No capítulo 1 introduzimos os conceitos necessários para o desenvolvimento do trabalho.
Apresentamos conceitos das Teorias de Conley e da seqüência espectral.

vi
No capítulo 2 apresentamos o método da varredura, bem como alguns resultados que
seguem deste método.
Nos capítulos 3 e 4 demonstramos os Teoremas 3.0.6 e 4.0.14, que conectam a mudança
algébrica de geradores de Z-módulos da seqüência espectral a uma família particular de
mudanças de base sobre Q da matriz de conexão ∆. Estes resultados podem ser enunciados
de forma resumida como segue.
Teorema As matrizes ∆r obtidas do método de varredura aplicado a ∆ determinam gera-
dores para os espaços Erp. Além disso, se Er
p e Erp−r são ambos não nulos, então a aplicação
drp : Er
p → Erp−r é induzida por ∆r, ou seja, é induzida pela multiplicação pela entrada
∆rp−r+1,p+1 quando a mesma é um pivô primário, um pivô mudança de base ou uma entrada
nula com uma coluna de zeros abaixo.
No capítulo 5 mostramos o Teorema 5.0.16, que prova a existência de um caminho de
linhas de �uxo ϕ conectando duas singularidades consecutivas. Mais especi�camente,
Teorema Seja (Er, dr) uma seqüência espectral induzida por um complexo de cadeias de
Morse Conley (C,∆) de um �uxo ϕ onde ∆ é uma matriz de conexão sobre Z. Se a dife-
rencial drp : Er
p,q → Erp−r,q+r−1 é não nula, então existe um caminho de órbitas conectantes
de ϕ unindo hk ∈ Fp \ Fp−1 a hk−1 ∈ Fp−r \ Fp−r−1.

Capítulo 1
Preliminares - Teoria de Conley e
Seqüências Espectrais
1.1 Fluxos
Seja M uma variedade compacta suave n-dimensional e ϕ : M ×R→M um �uxo contínuo
em M . Veja Salamon [Sa1] para mais detalhes e demonstrações.
De�nição 1.1.1. Um conjunto S ⊂ M é invariante sob o �uxo ϕ se para todo γ ∈ S,
ϕ(γ, t) ∈ S para todo t ∈ R.
Se S é invariante sob ϕ, então S (fecho de S) e Sc (complementar de S) são invarian-
tes. Além disso, a união e a intersecção de conjuntos invariante é também invariante. Um
conjunto é invariante se, e somente se, é a união de órbitas.
Seja N um subconjunto deM . Denotamos por Inv(N) o subconjunto invariante maximal
de N , ou seja,
Inv(N) = {γ ∈ N / ϕ(γ, t) ∈ N ∀ t ∈ R}
De�nição 1.1.2. Um conjunto invariante S é invariante isolado se existe uma vizinhança
compacta N de S tal que S é o invariante maximal em N ou seja, S = Inv(N). Neste caso,
N é chamado de vizinhança isolante de S.
1

2
De�nição 1.1.3. Dado Y ⊂M , o conjunto ω-limite de Y , denotado por ω(Y ), é o conjunto
ω(Y ) = Inv(ϕ(Y, [0,∞)))
Analogamente, o conjunto ω∗-limite de Y é
ω∗(Y ) = Inv(ϕ(Y, (−∞, 0]))
e é também denotado por α(Y ).
O conjunto ω-limite de uma união �nita é a união dos conjuntos ω-limite correspondentes.
Em particular, se z ∈ Y , ω(z) ⊂ ω(Y ). No entanto, em geral ω(Y ) é maior do que a união
dos ω(y) para y ∈ Y .
Se S é um conjunto invariante fechado compacto em M e Y ⊂ S então ω(Y ) e ω∗(Y ) são
por de�nição conjuntos invariantes não vazios. Além disso, estes conjuntos são compactos
em S, já que são fechados em S.
De�nição 1.1.4. Um subconjunto A ⊂ S é um atrator com relação a S se existe uma
vizinhança U de A em S tal que ω(U) = A. Analogamente, A ⊂ S é um repulsor com
relação a S se existe uma vizinhança U∗ de A em S tal que ω∗(U∗) = A.
O Lema 1.1.5 é uma caracterização dos atratores.
Lema 1.1.5. Sejam S um conjunto compacto invariante sob o �uxo ϕ e A um subcon-
junto compacto invariante em S. Então A é um atrator em S se e somente se existe uma
vizinhança U de A em S tal que γ ∈ U \ A implica ϕ(γ, (−∞, 0]) * U .
Todo atrator é um compacto invariante e todo repulsor é um atrator para o �uxo reverso.
Seja S um conjunto invariante compacto e seja A um atrator em S. Considere o conjunto
A∗ = {γ ∈ S / ω(γ) ∩ A = ∅}. A∗ é um repulsor, que chamamos de repulsor complementar
de A em S. A∗ é o maior subconjunto invariante de S disjunto do atrator A.
Proposição 1.1.6. Seja S um conjunto invariante compacto e seja A ⊂ S. Se A′ é um
atrator em A e A é um atrator em S, então A′ é um atrator em S.

3
Demonstração: Seja U tal que ω(U) = A. Como A′ é um atrator em A, existe U ′
vizinhança de A′ em S, U ′ ⊂ U , tal que ω(U ′ ∩ A) = A′.
Seja γ ∈ U ′ tal que ϕ(γ, (−∞, 0]) ⊂ U ′. Então ϕ(γ, (−∞, 0]) ⊂ U e portanto γ ∈ ω(U) =
A. Segue que ϕ(γ, (−∞, 0]) ⊂ U ′ ∩ A e, portanto, γ ∈ ω(U ′ ∩ A) = A′.
Assim, dado γ ∈ U ′ tal que ϕ(γ, (−∞, 0]) ⊂ U ′ então γ ∈ A′. Pelo Lema 1.1.5, A′
também é atrator em S.
Se A e B são conjuntos invariantes compactos em M , então C(A,B) é o conjunto das
órbitas conectando B a A em M , ou seja, o conjunto {γ ∈ M | ω(γ) ⊂ A and ω∗(γ) ⊂ B}.
Em particular, se A ⊂M é um atrator e A∗ é seu complementar repulsor, então o par atrator
repulsor (A,A∗) em M decompõe M na união M = A ∪ C(A,A∗) ∪ A∗.
1.2 Ordens parciais
Consideremos P um conjunto indexante �nito com m elementos. As principais referências
para esta seção são [Fr1], [Fr2] e [Fr3].
• Uma ordem parcial em P é uma relação < entre os elementos de P satisfazendo:
(a) π < π nunca vale para π ∈ P
(b) π < π′ e π′ < π′′ implicam π < π′′.
• Uma ordem total em P é uma ordem parcial em P que também satisfaz:
(c) Para cada π e π′ em P , ou π < π′ ou π′ < π.
Se π e π′ são tais que nem π < π′ e nem π′ < π então π e π′ são não comparáveis.
Seja < uma ordem parcial em P . Uma extensão de < é uma ordem parcial <′ em P tal
que π < π′ implica π <′ π′. Se <′ é uma ordem total em P então <′ é uma extensão linear
de <.
Se P ⊂ P , então < induz uma ordem parcial em P chamada de restrição de < a P .

4
Um intervalo em P é um subconjunto I ⊂ P para o qual π, π′ ∈ I e π < π′′ < π′ implicam
π′′ ∈ I. O conjunto de intervalos em < é denotado por I(<). Um intervalo I em I(<) é um
intervalo atrator se π ∈ I e π′ < π implicam π′ ∈ I. O conjunto dos intervalos atratores de
< é denotado por A(<). Dois elementos π, π′ são adjacentes se {π, π′} ∈ I(<).
No que segue, < denota a ordem parcial em P e também a ordem usual nos inteiros Z.
Uma s-upla adjacente de intervalos em < é uma coleção ordenada (I1, . . . , Is) de intervalos
mutuamente disjuntos em < satisfazendo:
• ∪si=1Ii ∈ I(<),
• π ∈ Ij, π′ ∈ Ik, j < k implica π′ ≮ π, ou seja, π < π′ ou π e π′ são não comparáveis.
A coleção de s-uplas adjacentes de intervalos em < é denotada por Is(<). Note que
I(<) = I1(<). É fácil ver que se <′ é uma extensão de < ou uma restrição de < a um intervalo
em < então Is(<′) ⊂ Is(<). Se (I, J) é um par adjacente de intervalos então denotamos o
intervalo I ∪ J por IJ . Se (I, J) e (J, I) são ambos pares adjacentes de intervalos, então I
e J são não comparáveis. Se (I1, . . . , Is) ∈ Is(<) e ∪si=1Ii = I, então (I1, . . . , Is) é chamada
uma decomposição de I. É claro que se (I, J,K) é uma tripla adjacente de intervalos, então
(I, J), (J,K), (IJ,K), (I, JK) são todos pares adjacentes de intervalos.
1.3 Índice de Conley
Nesta seção de�nimos o índice de Conley e destacamos suas principais propriedades. As
referências para esta seção são [Co] e [Sa1].
De�nição 1.3.1. Seja N um subconjunto compacto de M . Um subconjunto K é positiva-
mente invariante em N se
γ ∈ K, t ≥ 0, ϕ(γ, [0, t]) ⊂ N =⇒ ϕ(γ, t) ∈ K
Consequentemente ϕ(γ, [0, t]) ⊂ K.

5
De�nição 1.3.2. Seja S ⊂M um conjunto invariante isolado. Um par (N1, N0) de conjuntos
compactos em M é um par-índice para S em M se N0 ⊂ N1 e
i) N1 \N0 é uma vizinhança de S em M e S = Inv(N1 \N0),
ii) N0 é positivamente invariante em N1,
iii) Se γ ∈ N1 é tal que ϕ(γ, [0,∞)) * N1 então existe t ≥ 0 tal que ϕ(γ, [0, t]) ⊂ N1 e
ϕ(γ, t) ∈ N0.
O par-índice existe para vizinhanças isolantes arbitrárias do conjunto invariante isolado S.
A propriedade mais importante de par-índice é que o tipo de homotopia do espaço pontuado
N1/N0 independe da escolha do par-índice e, portanto, só depende do comportamento do
�uxo numa vizinhança do conjunto invariante isolado S. As demonstrações destes fatos
podem ser encontradas em [Sa1]. Logo podemos de�nir o índice de Conley.
De�nição 1.3.3. Seja S um conjunto invariante isolado em M . Então o tipo homotópico
c(S) = [N1/N0] do espaço pontuado N1/N0, onde (N1, N0) é um par-índice para S em M é
chamado índice homotópico de Conley de S em M .
Exemplo 1.3.4. O índice homotópico de uma singularidade hiperbólica do �uxo em uma
variedade é o tipo de homotopia da esfera pontuada de dimensão igual a da variedade instável
da singularidade.
Como conseqüência da existência e da invariância do par-índice temos o Corolário 1.3.5,
que generaliza a idéia de um par-índice de S para um trio-índice (N0, N1, N2) de um par
atrator-repulsor (A,A∗) em S.
Corolario 1.3.5. Sejam S um conjunto invariante isolado em M , (A,A∗) um par atrator-
repulsor em S e (N2, N0) um par-índice para S. Então existe uma �ltração N0 ⊂ N1 ⊂ N2
de conjuntos compactos em M tais que (N1, N0) é um par-índice para A e (N2, N1) é um
par-índice para A∗.
Conley introduz em [Co] a idéia de trios e Kurland provou sua existência em [K].

6
Proposição 1.3.6. Considere o trio N0 ⊂ N1 ⊂ N2. Se (N1, N0) é par-índice para A e
(N2, N0) é par-índice para S, então (N2, N1) é um par-índice para A∗.
Não faremos uso da estrutura completa do índice de Conley no que segue. Ao invés
disso, vamos utilizar algo mais fraco, porém mais algébrico. A maioria dos objetos algébri-
cos associados a espaços em topologia algébrica são invariantes homotópicos. Por exemplo,
os Z-módulos de homologia singular de um espaço dependem somente do tipo de homoto-
pia. O índice homológico de S, H(c(S)), é o Z-módulo graduado {Hq(c(S)), q = 1, . . .},
onde Hq(c(S)) é o q-ésimo Z-módulo de homologia singular de qualquer um dos quocientes
N1/N0, onde (N1, N0) é uma par-índice para S. O índice homológico de uma singularidade
hiperbólica com variedade instável de dimensão d é Hd(c(S)) = Z, Hq(c(S)) = 0 para q 6= d.
Geralmente é mais fácil calcular o índice homológico do que o índice homotópico. No entanto
perdemos algumas informações quando consideramos o índice homológico.
1.4 Decomposição de Morse
Sejam A ⊂ M é um atrator e A∗ é seu complementar repulsor. Sabemos que o par atrator
repulsor (A,A∗) em M decompõe M na união M = A ∪ C(A,A∗) ∪ A∗. A generalização
desta idéia é uma decomposição de Morse de M . As referências para esta seção são [Co],
[Fr1], [Fr2], [Fr3] e [Sa1].
De�nição 1.4.1. Seja < uma ordem parcial num conjunto �nito P . Uma decomposição
de Morse <-ordenada de M é uma coleção D(M) = {Mπ}π∈P de subconjuntos compactos
invariantes de M mutuamente disjuntos tais que se γ ∈ M \ ∪π∈PMπ, então existe π < π′
com γ ∈ C(Mπ,Mπ′).
Assim, uma decomposição de Morse de ϕ é uma coleção �nita de conjuntos invariantes
compactos disjuntos Mπ que juntos contém todo o comportamento recorrente por cadeias
de ϕ, ou seja, o conjunto recorrente por cadeias é precisamente o conjunto dos pontos que
pertencem a todas as decomposições de Morse.

7
De�nição 1.4.2. Um subconjunto de M que pertence a alguma decomposição de Morse é
chamado conjunto de Morse.
A proposição seguinte é uma conseqüência imediata da de�nição de decomposição de
Morse.
Proposição 1.4.3. Se <1 é uma ordem parcial em P , então D(M) = {Mπ}π∈P é uma
decomposição de Morse <1-ordenada de M se e somente se C(Mπ,Mπ′) 6= ∅ implica π <1 π′
para cada π, π′ ∈ P .
A ordem parcial < em P induz uma ordem parcial em D(M). Esta ordem parcial,
também denotada por <, é chamada uma ordem admissível da decomposição de Morse. O
�uxo em M de�ne uma ordem parcial natural em P chamada ordem do �uxo de D(M),
denotada <ϕ. A ordem do �uxo é de�nida considerando π <ϕ π′ se e somente se existe uma
seqüência de elementos distintos de P : π = π1, . . . , π` = π′ com C(Mπj,Mπj−1
) 6= ∅ para
cada j = 1, . . . , `. Em outras palavras, π <ϕ π′ sempre que C(Mπ,Mπ′) 6= ∅ e estendemos
usando a transitividade. Segue da Proposição 1.4.3 que <ϕ é uma ordem parcial em P e
D(M) é uma decomposição de Morse <ϕ-ordenada de M . A ordem do �uxo <ϕ é uma
ordem minimal em D(M), ou seja, tem o menor número de relações entre todas as outras
ordens admissíveis.
Proposição 1.4.4. Toda ordem admissível em D(M) é uma extensão da ordem do �uxo
<ϕ.
Demonstração: Suponha que π <ϕ π′. Então existe uma seqüência π = π1, . . . , π` =
π′ tal que C(Mπj,Mπj−1
) 6= ∅ para cada j = 1, . . . , `. Pela Proposição 1.4.3, πj−1 < πj para
j = 1, . . . , `. Portanto π < π′ e o resultado segue.
Uma outra ordem admissível que merece nossa atenção é a ordem da �ltração. Dado
um �uxo contínuo em M com uma decomposição de Morse �nita {Mi}mi=1 e uma função de
Lyapunov tal que f−1(ci) = Mi então a �ltração
{f−1(ci − ε, ci + ε)}mi=1

8
de�ne uma ordem admissível em M chamada ordem da �ltração e denotada por <f . Esta
ordem é uma ordem total.
O problema de usarmos a ordem da �ltração para de�nirmos a matriz de conexão é que
esta é uma ordem muito forte e, portanto temos bem menos pares adjacentes.
Associada a uma ordem admissível < de D(M) existe uma coleção de conjuntos de Morse
de <
MI = (∪π∈IMπ) ∪ (∪π,π′∈IC(Mπ′ ,Mπ))
para cada I ∈ I(<). Como uma ordem admissível < de D(M) é uma extensão da ordem do
�uxo, então I(<) ⊂ I(<ϕ). Segue que a coleção de conjuntos de Morse da ordem do �uxo
contem os conjuntos de Morse de qualquer outra ordem admissível.
Proposição 1.4.5. 1. Se J ∈ I(<) então existem intervalos K ∈ A(<) tais que (K\J, J)
é uma decomposição de K e K \ J ∈ A(<).
2. Se I é um intervalo atrator em <, então MI é um atrator em S com complementar
repulsor MP\I .
Demonstração:
1. K = {π ∈ P | existe π′ ∈ J com π < π′ ou π = π′} é um exemplo.
2. Demonstramos (2) por indução sobre a ordem da decomposição de Morse D(M). Se
D(M) é uma decomposição de Morse com apenas um conjunto então o resultado vale.
Suponhamos que o resultado vale para toda decomposição de Morse de ordem m − 1
e seja D(M) uma decomposição de Morse de ordem m.
Consideremos I um intervalo em A(<). Seja θ um elemento minimal de I, ou seja,
não existe π ∈ I com π < θ. Mostremos que Mθ é um atrator em S. Seja U uma
vizinhança compacta de Mθ em S disjunta de ∪π∈P\θMπ.
Seja γ ∈ U \Mθ. Então ω∗(γ) ⊂ ∪π∈P\θMπ. De fato, se ω∗(γ) * ∪π∈P\θMπ então
ω∗(γ) ⊂Mθ. Seja π tal que ω(γ) ⊂Mπ. Como θ é minimal então π não pode estar em
I \ θ e como I é um intervalo atrator então π não pode estar em P \ I. Logo π = θ, ou

9
seja ω(γ) ⊂ Mθ. Mas isso contradiz o fato de γ ∈ U \Mθ. Logo ω∗(γ) ⊂ ∪π∈P\θMπ.
Segue que ω∗(γ) * U e, pelo Lema 1.1.5, Mθ é um atrator em S. MP\θ é o repulsor
complementar de Mθ em S.
Seja <∗ a restrição de < a P \θ. Então {Mπ | π ∈ P \θ} é uma decomposição de Morse
<∗ ordenada. Por hipótese de induçãoMI\θ é uma atrator emMP\θ. MP\I é o repulsor
complementar de MI\θ em MP\θ. Como MP\θ é repulsor em S e MP\I é repulsor em
MP\θ então pela Proposição 1.1.6 MP\I é repulsor em S. Logo MI é atrator em S.
Franzosa mostra em [Fr1] que todo conjunto de Morse é um invariante compacto. Como
conseqüência disso podemos restringir decomposições de Morse a conjuntos de Morse e que
podemos engrossar decomposições de Morse usando conjuntos de Morse. Logo temos a
proposição seguinte.
Proposição 1.4.6. Seja D(M) = {Mπ}π∈P uma decomposição de Morse em S e I ∈ I(<).
Então
1. {Mπ}π∈I é uma decomposição de Morse <I-ordenada de MI , onde <I é a restrição de
< a I.
2. {Mπ}π∈P\I ∪MI é uma decomposição se Morse de S.
Como conseqüência da Proposição 1.4.6 temos o corolário seguinte.
Corolario 1.4.7. Se (I, J) ∈ I2(<), então (MI ,MJ) é um par atrator-repulsor em MIJ .
1.5 Continuação
A principal propriedade do índice de Conley é a sua invariância por continuação.
De�nição 1.5.1. Uma família parametrizada de �uxos sobre uma variedade M é uma
coleção de de �uxos {ϕλt |λ ∈ I} indexados por I = [0, 1] tal que Φt(x, λ) = (ϕλ
t x, λ)
é um �uxo suave sobre M × I. Dizemos que S0, um conjunto invariante para ϕ0t , e S1,

10
um conjunto invariante para ϕ1t , estão relacionados por continuação se existe um conjunto
invariante isolado S ⊂M × I para Φt tal que S0 = S ∩ {(x, 0)} e S1 = S ∩ {(x, 1)}.
Se N é uma vizinhança isolante para ϕλt para todo λ ∈ I, seja S = Inv(N × I) em Φt.
Então S de�ne uma continuação de S ∩ {(x, 0)} para S ∩ {(x, 1)}.
Como já foi dito, conjuntos relacionados por continuação têm o mesmo índice de Conley.
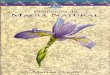
Exemplo 1.5.2. Consideremos a seguinte família de equações diferenciais ordinárias para-
metrizadas pela variável θ > 0.
x = +y y = +θy − x(x− 1/3)(1− x)
Exibimos o conjunto completo das soluções limitadas Sθ destas equações para valores de θ
próximo de 0 e para valores de θ grandes na Figura 1.1. Para θ > 0 o conjunto das soluções
limitadas é um conjunto invariante isolado e a coleção Mθ = {M iθ} é uma decomposição de
Morse de Sθ. Os conjuntos M1θ , M
2θ e M3
θ são os pontos no plano xy (1/3, 0), (0, 0) e (1, 0)
respectivamente.
M 2θ M 1
θ M 3θ
θ
θ grande
perto de zero
Figura 1.1: Sθ.
Franzosa mostra em [Fr3] que existe um parâmetro θ∗ para o qual existe uma órbita
conectante de M3θ∗ para M
2θ∗ . Comentaremos sobre este caso mais adiante. Veja 1.2.

11
M 2θ M 1
θ M 3θ
θ = θ∗
Figura 1.2: Conjunto das soluções limitadas para θ = θ∗.
O �uxo nas Figuras 1.1 e 1.2 pode ser esquematizado como na Figura 1.3.
M2 M1
M3
M2 M1
M3
0 < θ < θ∗ θ > θ∗
M1M2
M3
θ = θ∗
Figura 1.3: Retrato qualitativo do �uxo.
Assim, Sθ, θ < θ∗ e Sθ, θ > θ∗ são continuações de Sθ∗ .
1.6 Matriz de Conexão
Nesta seção de�nimos uma matriz de conexão para uma decomposição de Morse. A teoria
desenvolvida aqui pode ser encontrada em [Fr1], [Fr2], [Fr3], [MC], [MCR], [Mo], [R1], [R2].
As entradas na matriz de conexão registram a existência de órbitas conectantes em ϕ. Dada
uma decomposição D(M) = {Mπ} com m conjuntos de Morse Mπ, a matriz de conexão
é uma matriz m × m cujas entradas são homomor�smos entre os índices homológicos de
Conley associados aos conjuntos Mπ. Essas aplicações são de�nidas por seqüências exatas
em homologia. Nesta seção, os índices homológicos são computados com coe�cientes em um
módulo sobre um domínio de ideais principais. Em nossas aplicações, usaremos coe�cientes

12
em Z. Se não existem órbitas conectantes entre dois dados conjuntos de Morse, então a
entrada correspondente da matriz será a aplicação trivial.
Antes de considerarmos uma decomposição de Morse, consideremos o caso de um atrator-
repulsor.
1.6.1 Matriz de conexão do Par atrator-repulsor
Nesta seção vamos introduzir a aplicação bordo de�nida pelo �uxo para um par atrator-
repulsor. Este conceito é fundamental para a de�nição de matriz de conexão. Além disso,
vamos de�nir a matriz de conexão para o caso mais simples de decomposição de Morse que
é o par atrator-repulsor.
Sejam (A,A∗) um par atrator-repulsor em M e N0 ⊂ N1 ⊂ N2 conjuntos compactos
tais que (N1, N0) é um par-índice para A, (N2, N0) é um par-índice para M , (N2, N1) é um
par-índice para A∗. Temos então as aplicações induzidas
0 // N1/N0i // N2/N0
p // N2/N1// 0
e, portanto, temos a seguinte seqüência de complexos de cadeias associada
0 // C∗(N1/N0)i // C∗(N2/N0)
p // C∗(N2/N1) // 0 (1.1)
A proposição seguinte e sua demonstração podem ser encontradas em [Fr2].
Proposição 1.6.1. Consideremos uma seqüência de complexos de cadeias
0 // C1i // C2
p // C3// 0
tal que
• i é injetiva e p ◦ i = 0
• ρ : C2/Im i→ C3 é uma aplicação de cadeias de�nida por p que induz um isomor�smo
em homologia.

13
Então existe um homomor�smo ∂ : H∗(C3) → H∗(C1) de grau −1 tal que
. . . // H∗(C1)i // H(C2)
p // H∗(C3)∂ // H(C1) // . . .
é exata.
Notemos que a aplicação quociente p : N2/N0 → N2/N0
N1/N0
≈ N2/N1 de�ne a apli-
cação de cadeias ρ : C∗(N2/N0, N1/N0) → C∗(N2/N1) que induz um isomor�smo ρ∗ :
H∗(N2/N0, N1/N0) → H∗(N2/N1). Como i é injetiva e p ◦ i = 0 a seqüência de comple-
xos de cadeias (1.1) satisfaz a Proposição 1.6.1 e, portanto, temos a seqüência exata longa
em homologia associada
. . . // H∗(N1/N0) // H∗(N2/N0) // H∗(N2/N1)∂ // H∗(N1/N0) // . . .
Segue da invariância do par-índice que
. . . // H(c(A)) i // H(c(M))p // H(c(A∗))
∂(A∗,A)// H(c(A)) // . . . (1.2)
A seqüência exata (1.2) é chamada de seqüência do índice homológico do par atrator-repulsor
(A,A∗). Para mais detalhes veja [K] e [Fr1].
De�nição 1.6.2. A aplicação ∂(A∗, A) : H(c(A∗)) → H(c(A)) de grau −1 é chamada
aplicação bordo de�nida pelo �uxo e a seqüência 1.2 é chamada de seqüência exata do índice
homológico do par atrator-repulsor.
A importância da aplicação bordo de�nida pelo �uxo é dada pela seguinte proposição.
Proposição 1.6.3. Se ∂(A∗, A) 6= 0 então C(A,A∗) 6= 0.
A idéia da prova é que se C(A,A∗) = ∅, então M = A ∪ A∗ e, portanto, H(c(M)) =
H(c(A))⊕H(c(A∗)). Pela seqüência (1.2) ∂(A∗, A) é a aplicação nula. Assim, se ∂(A∗, A) 6=
0, então C(A,A∗) 6= ∅.
Segue diretamente da Proposição 1.6.3 que C(A,A∗) = ∅ implica ∂(A∗, A) = 0. Além
disso, como (1.2) é exata então H(c(M)) = 0 implica que ∂(A∗, A) é um isomor�smo. Note

14
que a aplicação ∂(A∗, A) contém informação sobre a estrutura do par atrator-repulsor (A∗, A)
em M .
No caso de singularidades hiperbólicas transversais, ∂ conta o número de órbitas conec-
tantes "com orientação".
No caso de usarmos homologia com coe�cientes Z2, McCord mostra em [MC] que dadas
duas singularidades hiperbólicas A e A∗ tais que a variedade instável de A∗ e a variedade
estável de A são transversais, então a aplicação de�nida pelo �uxo ∂(A∗, A) conta o número
de órbitas conectantes de A∗ para A (mod 2).
Consideremos agora o complexo de cadeias
C∆(M) = H(c(A))⊕H(c(A∗))
e a aplicação bordo de�nida pela matriz
∆ =
0 ∂
0 0
:
H(c(A))
H(c(A∗))
→
H(c(A))
H(c(A∗))
É fácil ver que ∆ é um aplicação bordo. Fazendo a restrição apropriada em C∆(M) e
∆ de�nimos complexos de cadeia C∆(A) = H(c(A)) e C∆(A∗) = H(c(A∗)) com aplicações
bordo ∆(A) e ∆(A∗) respectivamente que, por sua vez, são triviais. Assim, (C∆(A),∆(A)) =
(H(c(A)), 0) e (C∆(A),∆(A)) = (H(c(A∗)), 0) são subcomplexos de C∆(M). Então temos
uma seqüência exata curta de�nida
0 // C∆(A) i // C∆(M)p // C∆(A∗) // 0 (1.3)
onde i é a inclusão e p é a projeção. Esta seqüência é a mesma que
0 // H(c(A)) i// H(c(A))⊕H(c(A∗))p // H(c(A∗)) // 0
Sejam H∆(M), H∆(A) e H∆(A∗) as homologias dos complexos C∆(M), C∆(A) e C∆(A∗)
respectivamente.
Passando (1.3) para a homologia obtemos a seguinte seqüência exata em homologia
. . . // H∆(A) i // H∆(M)p // H∆(A∗) ∂ // H∆(A) // . . .

15
Como ∆(A) = ∆(A∗) = 0 então H∆(A) = H(c(A)), H∆(A∗) = H(c(A∗)) e ∂ = ∂. Portanto
temos o seguinte diagrama comutativo de módulos de homologia e aplicações:
. . . // H∆(A) i //
id��
H∆(M)p //
��
H∆(A∗) ∂ //
id��
H∆(A)
id��
// . . .
. . . // H(c(A)) i // H(c(M))p // H(c(A∗)) ∂ // H(c(A)) // . . .
Segue do Five Lemma que as aplicações Φ : H∆(M) → H(c(M)) que fazem o diagrama
comutar são isomor�smos.
Assim, o complexo (H(c(A)) ⊕ H(c(A∗)),∆) induz uma seqüência exata em homologia
que é isomorfa a seqüência do índice homológico. Além disso, ∆ contém informações sobre
o conjunto de órbitas conectantes C(A∗, A), já que ∂(A,A∗) 6= 0 implica C(A∗, A) 6= 0. A
matriz ∆ é chamada de matriz de conexão do par atrator-repulsor (A,A∗).
1.6.2 Matriz de conexão para decomposições de Morse
O par-índice para um conjunto invariante isolado é generalizado pela �ltração-índice para
uma ordem admissível em uma decomposição de Morse. Franzosa mostra em [Fr1] que a
�ltração-índice sempre existe.
De�nição 1.6.4. Uma �ltração-índice para uma ordem admissível< deD(M) é uma coleção
de conjuntos compactos N = {NI}I∈A(<) satisfazendo:
i) Para cada I ∈ A(<), (NI , N∅) é um par-índice para o atrator MI .
ii) Para I1, I2 ∈ A(<), NI1∩I2 = NI1 ∩NI2 e NI1∪I2 = NI1 ∪NI2 .
A Proposição 1.6.5 mostra que uma �ltração-índice determina pelo menos um par-índice
para cada conjunto de Morse da decomposição D(M).
Proposição 1.6.5. Seja N uma �ltração-índice para a ordem admissível < de D(M). Se
J ∈ I(<) e (I, J) é uma decomposição de um intervalo atrator K ∈ A(<), então segue que
I ∈ A(<) e (NK , NI) é um par-índice para o conjunto de Morse MJ de D(M).

16
Demonstração: A propriedade (ii) da De�nição 1.6.4 implica que N∅ ⊂ NI ⊂ NK e
a propriedade (i) da De�nição 1.6.4 implica que (NI , N∅) e (NK , N∅) são pares índices para
MI eMK respectivamente. Pelo Corolário 1.4.7 (MI ,MJ) é um par atrator repulsor emMK .
Segue da Proposição 1.3.6 que (NK , NI) é um par-índice para MJ .
Pelas Proposições 1.4.5 (1) e 1.6.5 a �ltração-índice de�ne um par-índice para cada con-
junto de Morse da ordem admissível. Além disso, dados dois pares (NK , NI) e (NK , NI) para
MJ , existe uma equivalência de homotopia entre os espaços NK/NI e NK/NI .
Sejam I, J ∈ I(<) e C(NK/NI ,Z) as cadeias singulares do espaço índice NK/NI com
coe�cientes em Z. Note que poderíamos escolher coe�cientes em qualquer módulo G. De-
�nimos então o complexo de cadeias CN (c(MJ);Z) também denotado por C(c(MJ)) que é
naturalmente isomorfo a C(NK/NI ,Z). Passando para a homologia em C(c(MJ)) obtemos
H∗(c(MJ);Z), a homologia singular com coe�cientes em Z do índice de Conley c(MJ) de
MJ .
Fransoza mostra em [Fr1] que, dada uma �ltração-índice N para uma ordem admissível
<, existe uma coleção de complexos de cadeias, que denotamos por CN (<), e aplicações
satisfazendo:
1. Para cada I ∈ I(<) existe um complexo de cadeias C(I);
2. Dados (I, J) ∈ I2(<) existem aplicações cadeia
0 // C(c(MI))i(I,IJ)// C(c(MIJ))
p(IJ,J)// C(c(MJ)) // 0 (1.4)
com a propriedade que
(i) i(I, IJ) é injetiva e p(IJ, J)i(I, IJ) = 0.
(ii) A aplicação cadeia p(IJ, J) de�ne ρ :C(c(MIJ))
Im i(I, IJ)→ C(c(MJ)) que induz um
isomor�smo em homologia.
(iii) Se I e J são não comparáveis, então p(JI, I)i(I, IJ) = id|C(c(MI))
(iv) Se (I, J,K) ∈ I3(<) então o diagrama abaixo comuta

17
C(c(MI))
C(c(MIJ))
C(c(MJ))C(c(MIJK))
C(c(MJK))
C(c(MK))
i
pi
i
ip
p
p
Uma coleção de complexos com as propriedades de CN (<) é chamada de trança de com-
plexos de cadeias.
Pela Proposição 1.6.1 temos a seqüência exata longa de índices homológicos do par
atrator-repulsor (MI ,MJ):
. . . // H(c(MI))i(I,IJ)// H(c(MIJ))
p(IJ,J)// H(c(MJ))∂(J,I) // H(c(MI)) // . . . (1.5)
com as seguintes propriedades:
(i) (1.5) independe da �ltração-índice N .
(ii) Se I e J são não comparáveis então p(JI, I)i(I, IJ) = id|H(c(MI))
(iv) Se (I, J,K) ∈ I3(<) então o diagrama abaixo comuta
Assim, passando para a homologia, uma trança de complexos de cadeias de�ne o que
chamamos de trança de módulos graduados.
O homomor�smo ∂(J, I) : H(c(MJ)) → H(c(MI)) é a aplicação bordo ou aplicação de
conexão do par adjacente (MI ,MJ). ∂(J, I) é trivial quando não existem órbitas conectantes
de MJ para MI . De fato, se não existem órbitas conectando MI a MJ então o conjunto de
Morse MIJ é a a união dos primeiros. Neste caso, a seqüência exata acima representa
H(c(MIJ)) como soma direta de H(c(MI)) e H(c(MJ)). Segue que a aplicação bordo ∂(J, I)
é o homomor�smo trivial. Portanto, uma aplicação bordo não trivial implica na existência
de uma órbita conectante.

18
H(c(MI))
H(c(MIJ))
H(c(MJ))H(c(MIJK))
H(c(MJK))
H(c(MK))
i
pi
ip
p
H(c(MK))
H(c(MI))
H(c(MIJ))
H(c(MJ)) H(c(MIJK))
∂
∂
∂
i
i
p
∂
∂
i
i
p
∂
Dado um intervalo I ⊂ P , de�nimos
C∆(I) = ⊕π∈IH(c(Mπ))
Para I, J ∈ I(<) seja ∆(J, I) : C∆(J) → C∆(I) a aplicação dada pela matriz...
· · · ∆(π′, π) · · ·...
π∈I,π′∈J
Então ∆(I) : C∆(I) → C∆(I) é da forma:...
· · · ∆(π′, π) · · ·...
π,π′∈I
:
...
H(c(Mπ))...
π∈I
→
...
H(c(Mπ))...
π∈I
tal que cada ∆(π′, π) é uma aplicação de H(c(Mπ′)) em H(c(Mπ)) localizada na π-ésima
linha e na π′-ésima coluna da matriz.
De�nição 1.6.6. • Dizemos que ∆(I) é triangular superior se ∆(π′, π) = 0 quando
π ≮ π′.

19
• ∆(I) é uma aplicação bordo se cada ∆(π′, π) tem grau -1 e ∆(I)2 = 0.
Se ∆(P ) é uma aplicação bordo triangular superior, então sua restrição ∆(I) também
é, para qualquer intervalo I. De fato, é claro que ∆(I) é triangular superior e de grau -1.
Além disso, dado I ⊂ P , considere os intervalos J e K tais que J ∪ I ∪K = P e (I, J,K) é
uma tripla de intervalos. Logo, podemos decompor ∆ como
∆(P ) =
∆(J) ∆(I, J) ∆(K, J)
0 ∆(I) ∆(K, I)
0 0 ∆(K)
Na equação ∆(P )2 = 0 a composição da linha do meio com a coluna do meio nos dá
∆(I)2 = 0. Logo, dado I ∈ I(<), (C∆(I),∆(I)) é um complexo de cadeias. Denotamos por
H∆(I) a homologia desse complexo.
Assim, dados I, J ∈ I2(<) com a inclusão e a projeção óbvias temos uma seqüência exata
curta de complexos de cadeia
0 // C∆(I)i(I,IJ)// C∆(IJ)
p(IJ,J)// C∆(J) // 0
onde i é a inclusão e p é a projeção.
Proposição 1.6.7. As aplicações i(I, IJ) e p(IJ, J) são aplicações de cadeias.
Demonstração: Podemos considerar i e p como sendo da forma
i =
id
0
: C∆(I) →
C∆(I)
C∆(J)
∆(I) ∆(J, I)
0 ∆(J)
:
C∆(I)
C∆(J)
→
C∆(I)
C∆(J)
Fazendo tais identi�cações temos i∆(I) = ∆(IJ)i e portanto i é um aplicação de cadeias.
A demonstração para p é análoga.

20
Proposição 1.6.8. Dada uma aplicação bordo triangular superior
∆(P ) : ⊕π∈PH(c(Mπ)) → ⊕π∈PH(c(Mπ))
a coleção de complexos (C∆(I),∆(I)), I ∈ I(<) e as aplicações de cadeias i(I, IJ) e p(IJ, J)
para (I, J) ∈ I2(<) é um uma trança de complexos de cadeias.
Passando para a homologia obtemos então uma trança de módulos graduados
. . . // H∆(I) i // H∆(IJ)p // H∆(J)
∆(J,I)// H∆(I) // . . .
Uma pergunta natural é se existe uma aplicação bordo triangular superior ∆(P ) tal que
H∆(P ) seja isomorfo a H(c(M)).
De�nição 1.6.9. Seja D(M) = {Mπ}π∈P uma decomposição de Morse de M com ordem
admissível < e seja ∆ = ∆(P ) : ⊕π∈PH(c(Mπ)) → ⊕π∈PH(c(Mπ)) tal que
(1) ∆ é uma aplicação bordo triangular superior.
(2) Para cada intervalo I ⊂ P existe um homomor�smo Φ(I) : H∆(I) → H(c(MI))
satisfazendo as seguintes condições:
� Dado π ∈ P , Φ(π) : H∆(π) = H(c(Mπ)) → H(c(Mπ)) é a identidade;
� para cada (I, J) ∈ I2(<) o diagrama seguinte comuta:
. . . // H∆(I) i //
Φ(I)
��
H∆(IJ)p //
Φ(IJ)
��
H∆(J)∆(J,I) //
Φ(J)
��
H∆(I)
Φ(I)
��
// . . .
. . . // H(c(MI))i // H(c(MIJ))
p // H(c(MJ))∂(J,I) // H(c(MI)) // . . .
Então ∆ é chamada matriz de conexão de D(M). Denotamos as matrizes de conexão
por (CM(D(M), <).
Por indução e pelo Five Lemma segue que para todo intervalo I as aplicações Φ(I) :
H∆(I) → H(c(MI)) que fazem o diagrama comutar, são isomor�smos. A condição (2) diz
que se J = π′ e I = π então ∆(π′, π) = ∂(π′, π), isto é, as entradas da matriz de conexão

21
M1M2
M3
Figura 1.4: Representação qualitativa de Sθ∗ .
cujas colunas e linhas correspondem a conjuntos de Morse adjacentes são aplicações bordo
de�nidas pelo �uxo.
Note que a diagonal da matriz de conexão é zero. Além disso, a matriz de conexão é
triangular superior, já que não há órbitas conectantes de um conjunto de Morse para um
outro que esteja mais alto na ordem do �uxo.
As entradas correspondentes a conjuntos adjacentes são calculadas pela seqüência exata
em homologia. As outras entradas podem ser calculadas construindo seqüências exatas de
triplas escolhidas apropriadamente. Mais especi�camente, a informação usada para de�-
nir ∆(π′, π) é a informação produzida pelas aplicações bordo ∂(J, I) de�nidas pelo �uxo
satisfazendo π′ ∈ J e π ∈ I. Não trataremos deste problema em detalhes neste trabalho.
O Exemplo clássico 1.6.10 está em [Fr1] é uma ilustração simples da construção destas
matrizes de conexão.
Exemplo 1.6.10. Voltemos ao exemplo 1.5.2. Consideremos o caso θ = θ∗. Lembremos
que, qualitativamente, o �uxo pode ser representado como na Figura 1.4. O conjunto Sθ∗
consiste de 3 singularidades juntamente com as órbitas que conectam as mesmas. A Figura
1.5 ilustra uma �ltração-índice para essa ordem admissível.
O índice de Conley de cada um dos conjuntos de Morse é calculado escolhendo-se um
par-índice apropriado da �ltração-índice. Temos que
• H0(c(M1)) = Z , H1(c(M1)) = 0,

22
M1M2
M3
N(∅) N(1) N(12) N(123)
Figura 1.5: Filtração-índice.
• H0(c(M2)) = 0, H1(c(M2)) = Z,
• H0(c(M3)) = 0, H1(c(M3)) = Z,
• H0(c(M12)) = H1(c(M12)) = 0,
• H0(c(M23)) = 0, H1(c(M23)) = Z⊕ Z,
• H0(c(M123)) = 0, H1(c(M123)) = Z,
A ordem do �uxo é 1 <ϕ 2, 1 <ϕ 3 e 2 <ϕ 3.
De�namos a matriz de conexão. Como ∆ é triangular superior, então ∆(j, i) = 0 se j < i
ou j = i. Note que os pares de intervalos (1, 2) e (2, 3) são adjacentes. Logo, as aplicações
∆(2, 1) e ∆(3, 2) são de�nidas pelo �uxo, ou seja ∆(2, 1) = ∂(2, 1) e ∆(3, 2) = ∂(3, 2). Temos
0 // H1(c(M12))p // H1(c(M2))
∂(2,1) // H0(c(M1))i // H0(c(M12))
p // 0
que é equivalente a
0 // Z∂(2,1) // Z // 0

23
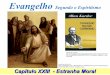
∆ =
F0M1
F1M2
F2M3
F0 M1 0 ≈ a
F1 M2 0 0 0
F2 M3 0 0 0
Figura 1.6: Matriz de conexão de Sθ∗ .
Logo ∆(2, 1) é um isomor�smo. Ainda,
0 // H1(c(M3)) // H1(c(M23)) // H1(c(M3))∂(3,2) // H0(c(M2)) // 0
que é equivalente a
0 // Z // Z⊕ Z // Z∂(3,2) // 0
Portanto ∆(3, 2) = 0. A aplicação ∆(3, 1) não está de�nida pelo �uxo. Como H1(c(M123))
tem dimensão 1 então o posto de ∆ é 1. Neste exemplo, ∆2 = 0 e posto de ∆ = 1 não ajudam
a determinar a. Veja 1.6. Vamos então considerar as seqüências de triplas de intervalos.
Primeiramente, consideremos o complexo (C∆(23),∆(23))=(H(c(M2))⊕H(c(M3)),∆(23))
onde
∆(23) =
0 ∆(3, 2)
0 0
é a aplicação trivial. Então H∆(23) = H(c(M2)) ⊕ H(c(M3)). Se ∆ é uma matriz de
conexão então devemos ter o isomor�smo φ(23) : H(c(M2)) ⊕ H(c(M3)) → H(c(M23)) tal
que o diagrama (1.6) comuta
H(c(M2))⊕H(c(M3)) H(c(M3))
‖ ‖
H∆(23)p−→ H∆(3)
↓φ(23) ↓id
H(c(M23))p−→ H(c(M3))
(1.6)

24
Consideremos agora o complexo C∆(123) = H(c(M1)) ⊕ H(c(M2)) ⊕ H(c(M3)) com
aplicação bordo ∆. Como ∆ é matriz de conexão então a seqüência exata curta de complexo
de cadeias
0 // C∆(1) i // C∆(123)p // C∆(23) // 0
que é equivalente a
0 // H(c(M1)) // H(c(M1))⊕H(c(M2))⊕H(c(M3)) // H(c(M3))⊕H(c(M2)) // 0
induz uma seqüência exata em homologia
0 // H∆(1) i // H∆(123)p // H∆(23) ∆ // H∆(1) // 0
onde H∆(1) = H(c(M1)), H∆(23) = H(c(M2))⊕H(c(M3)). Logo,
∆ = ∆(2, 1) + ∆(3, 1) : H(c(M2))⊕H(c(M3)) → H(c(M1))
e como ∆ é matriz de conexão o diagrama seguinte comuta
H(c(M2))⊕H(c(M3))∆(2,1)+∆(3,1)−→ H(c(M1))
‖ ‖
H∆(23)∆−→ H∆(1)
↓φ(23) ↓id
H(c(M23))∂(23,1)−→ H(c(M1))
(1.7)
Vamos agora de�nir ∆(3, 1). Um par-índice para M3 é (N(123), N(12)). Tomemos α
um gerador de H(c(M3)). Veja Figura 1.7. Para fazer o diagrama 1.6 comutar é necessário
que p ◦ φ(23)(α) = id ◦ p(α), ou seja, p ◦ φ(23)(α) = α. A Figura 1.9 facilita a visualização
do diagrama 1.6. Observando 1.9 vemos que existem duas escolhas possíveis para φ(23)(α)
em H(c(M23)) que são u1 e u2. Agora veja Figura 1.8. Como o diagrama 1.7 é comutativo,
então ∆(3, 1)(α) = ∆ ◦ φ(23)(α). A Figura 1.10 facilita a visualização do diagrama 1.7.
Se φ(23)(α) = u1 então ∆(3, 1) = 0. Se φ(23)(α) = u2 então ∆(3, 1)(α) é um gerador de
H(c(M1)) e, portanto ∆(3, 1) é um isomor�smo. Portanto existem duas matrizes de conexão
para esta decomposição de Morse.

25
α
Figura 1.7: Gerador de H(c(M3)).
u1
u2
Figura 1.8: Imagem do gerador de H(c(M3)) por φ(23).
H(c(M2))⊕H(c(M3)) −→ H(c(M3))
↓φ(23) ↓id
H(c(M23))p−→ H(c(M3))
⊕
Figura 1.9: Esquema para visualização de (1.6).

26
H(c(M2))⊕H(c(M3)) −→ H(c(M1))
↓φ(23) ↓id
H(c(M23))p−→ H(c(M1))
⊕
Figura 1.10: Esquema para visualização de (1.7).
Como todos os Z-módulos são graduados, então podemos pensar numa seqüência de
matrizes ∆k que levam a homologia de grau k na homologia de grau k−1. Frequentemente os
módulosH(Mπ) têm dimensão 1 em algum grau e 0 nos outros graus. Neste caso as aplicações
∆(π′, π) podem ser vistas como números inteiros e ∆ é apenas uma matriz numérica no
sentido usual.
Seja CM(D(M), <) o conjunto das matrizes de conexão com a ordem parcial <. A ordem
que estamos interessados é a ordem de�nida pelo �uxo <ϕ. As outras ordens são importante
na teoria de continuação para matrizes de conexão. Ver [Fr2], [Fr4], [R1].
Franzosa mostra em [Fr3] a existência das matrizes de conexão.
Teorema 1.6.11. Seja (D(M), <) uma decomposição de Morse em M . Então
CM(D(M), <) 6= ∅
A matriz produz informações sobre a estrutura de M (ver [Fr3]).
Proposição 1.6.12. Se ∆ ∈ CM(D(M), <ϕ), π e π′ são adjacentes na ordem do �uxo, e
∆(π′, π) 6= 0, então C(Mπ′ ,Mπ) 6= ∅

27
Demonstração: ∆(π′, π) 6= 0 implica π <ϕ π′. Segue da de�nição de ordem do
�uxo que existe uma seqüência de elementos distintos P : π = π0, . . . , πn = π′ com
C(Mπj,Mπj−1
) 6= ∅ para cada j = 1, . . . , n. Como π e π′ são adjacentes na ordem do
�uxo então n = 1, ou seja, C(Mπ,Mπ′) 6= ∅.
Observação 1.6.13. Suponha que para alguma matriz de conexão em CM(D(M), <ϕ) a
composição ∆(π′, π)∆(π′′, π′) é não trivial e que π e π′ bem como π′ e π′′ são adjacentes na
ordem do �uxo. Pela Proposição 1.6.12 ambos C(Mπ′′ ,Mπ′) e C(Mπ′ ,Mπ) são não vazios.
Além disso, se Π := {π, π′, π′′}, então ∆(Π)2 6= 0. Segue que Π não é um intervalo na ordem
do �uxo. Portanto mais estrutura está presente. Isto implica que C(Mπ′′ ,Mπ) 6= ∅ e, além
disso que existe um intervalo I na ordem do �uxo tal que π /∈ I e ambos C(Mπ′′ ,MI) e
C(MI ,Mπ) são não vazios.
Mπ′′
Mπ
Mπ′MI
Figura 1.11: ∆(Π)2 6= 0 implica que Π não é um intervalo.
Algumas decomposições de Morse têm várias matrizes de conexão. Se a ordem parcial
de uma decomposição é fraca, então existe um grande número de pares adjacentes e de
intervalos. Por outro lado, se a ordem parcial é muito forte, existirão mais matrizes de
conexão devido a falta de conhecimento da ordem do �uxo. Portanto, a não unicidade da
matriz de conexão está algumas vezes ligada ao uso de uma ordem parcial muito forte. No
entanto, mesmo usando a ordem do �uxo, podem existir várias matrizes de conexão. Isto
pode ser uma conseqüência da ocorrência de conexões instáveis entre os conjuntos de Morse,
veja Exemplo 1.5.2.

28
No caso de uma decomposição de Morse com a ordem do �uxo tal que os conjuntos
de Morse são singularidades hiperbólicas com variedades estáveis e instáveis transversais,
Reineck mostrou em [R1] que a matriz de conexão é única.
Teorema 1.6.14 (Reineck). Suponha que W s(Mπ′) e W u(Mπ′′) se intersectam transver-
salmente para π′ ∈ P . Então a matriz de conexão ∆ considerando-se a ordem parcial
determinada pelo �uxo é única.
Demonstração: Sejam π e π′ ∈ P tais que π <ϕ π′.
Suponhamos primeiramente que π e π′ são adjacentes em P . Então a aplicação ∆(Mπ,Mπ′)
é de�nida pela seqüência
. . . // Hq(c(Mπ ∪ C(Mπ,Mπ′) ∪Mπ′)) // Hq(c(Mπ′)) // Hq−1(c(Mπ)) // . . .
e, portanto, é única.
Suponhamos agora que π e π′ não são adjacentes e mostremos que ∆(Mπ,Mπ′) = 0.
Como π e π′ não são adjacentes então existe π′′, com π′ <ϕ π′′ <ϕ π. Sejam i, j e k tais que
c(Mπ) = Σi, c(Mπ′′) = Σj e c(Mπ′) = Σk. Como π′ <ϕ π′′ e W s(Mπ′) intercepta W u(Mπ′′)
transversalmente temos que i < j, ou seja, i ≤ j − 1. Analogamente, j ≤ k − 1, então
i ≤ k− 2. A aplicação ∆(Mπ,Mπ′) é uma aplicação de grau −1 de H∗(Σk, pt) em H∗(Σ
i, pt)
onde i ≤ k − 2. A única aplicação possível é ∆(Mπ,Mπ′) = 0.
Assim, cada aplicação ∆ é ou zero ou de�nida unicamente pelo �uxo.
1.6.3 Connection matrix in Morse �ows
Seja M uma variedade Riemanniana compacta suave de dimensão n e ϕ o �uxo gradiente
de uma função de Morse f : M → R. As referências para esta seção são [F2], [M2] e [Sa1].
É claro que f decresce nas órbitas de ϕ e as singularidades de ϕ são os pontos críticos de f .
Como f é de Morse, então todas as singularidades de ϕ são hiperbólicas, ou seja, a Hessiana
de f é não singular em todos os pontos críticos de f . Dado x uma singularidade hiperbólica
emM , sejamW s(x) = {y ∈M | lims→∞ϕs(y) = x} eW u(x) = {y ∈M | lims→−∞ϕ
s(y) = x}

29
as variedades estável e instável de x. Como f é de Morse, as variedades estável e instável são
transversais e a imagem por f de quaisquer duas singularidades distintas é também distinta.
Se x ∈M é uma singularidade hiperbólica então sabemos que existem coordenadas locais
(a1, a2, . . . , ak, b1, b2, . . . , bn−k) numa vizinhança de x tais que
f(a1, a2, . . . , ak, b1, b2, . . . , bn−k) = f(x)− a21 − a2
2 − · · · − a2k + b21 + b22 · · ·+ b2n−k
O inteiro k é chamado de índice de Morse de x e coincide com a dimensão de W u(x).
Denotemos por ind(x) o índice de Morse de x.
Seja D(M) = {Mπ}π∈P uma decomposição de Morse <-ordenada de M tal que cada Mπ
é uma singularidade hiperbólica de ϕ.
Então o índice de Conley de cada conjunto é o tipo de homotopia de uma esfera pontuada
Σk, onde k é a dimensão da variedade instável de x.
Vamos agora fazer uma construção que foi formalizada por Floer no caso gradiente,
mas que já estava implícita em teoria de Morse. Para mais detalhes ver [Sa2] e [M1].
Primeiramente, escolhemos uma orientação para o espaço vetorial Eu(x) = TxWu(x) para
todo ponto crítico de f e denotamos por 〈x〉 o par consistindo de um ponto crítico x e sua
orientação. Para todo k = 0, 1, . . . , n denotamos
Ck =∑
x
Z〈x〉
onde x varia entre todos os pontos críticos de índice k. Como f é uma função de Morse,
então W u(x) ∩W s(y) tem dimensão 1 e consiste de um número �nito de órbitas se ind(x)-
ind(y) = 1. Neste caso, podemos de�nir um inteiro n(x, y) associando um número +1 ou −1
a todas as órbitas conectantes e considerando a soma. Seja γ(s) uma órbita conectante com
lims→−∞γ(s) = x e lims→∞γ(s) = y. Então 〈x〉 induz uma orientação no complementar
ortogonal Euγ (x) de v = lims→−∞γ(s)|γ(s)|−1 em Eu(x). No caso em que ind(x) = k e
ind(y) = k − 1, o �uxo tangente induz um isomor�smo entre Euγ (x) e Eu(y) e de�nimos
nγ como sendo +1 ou −1 de acordo com o fato de o isomor�smo preservar a orientação ou
reverter a orientação respectivamente. De�nimos então
n(x, y) =∑
γ
nγ

30
onde a soma varia entre todas as órbitas de ϕ que conectam x a y. Então o operador bordo
∂ck : Ck → Ck−1 do complexo de cadeias, conhecido como operador bordo de Witten, é
de�nido como
∂c〈x〉 =∑
y
n(x, y)〈y〉
onde a soma varia sobre todas as singularidades de índice k − 1.
Denotemos este complexo de cadeias graduado de Morse por
(Z〈critf〉, ∂c)
Teorema 1.6.15 (R.Thom, S. Smale, J. Milnor, C. Conley, E. Witten). ∂ck ◦ ∂c
k+1 = 0 e o
módulo de homologia H(C) = Ker∂ck/Im∂
ck+1 é isomorfo ao módulo de homologia do índice
de Conley H(c(M)).
Mostremos agora que o operador bordo de Witten ∂c representa um caso especial de
matriz de conexão. Uma conseqüência deste fato é que o Teorema 1.6.15 segue dos trabalhos
de Franzosa [Fr1], [Fr3] e [Mo].
Se M é uma variedade orientada então o conjunto de nível
Mc = {x ∈M | f(x) = c}
é uma subvariedade de M para todo valor regular c. Mais precisamente, uma base ξ2, . . . , ξn
de TxMc é positivamente orientada se −∇f(x), ξ2, . . . , ξn de�ne uma base positiva para
TxM . Além disso, a orientação 〈x〉 de Eu(x) = TxWu(x) induz uma orientação em Es(x) =
TxWs(x), pois TxM = Eu(x)⊕Es(x). Segue que a esfera W u
c (x) = W u(x) ∩Mc herda uma
orientação de W u(x) e a esfera W sc (y) = W s(y) ∩Mc herda uma orientação de W s(y). O
inteiro n(x, y) no operador bordo de Witten coincide com o número de intersecção deW uc (x)
e W sc (y) em Mc.
Descrevemos então uma matriz de conexão para o caso de um �uxo Morse gradiente.
Para cada ponto crítico x de f , seja (Nx, Lx) um par-índice para x. Se ind(x) = k então
uma orientação de Eu(x) = TxWu(x) determina um gerador de Hk(Nx, Lx;Z) ∼= Z. Então o
Z-módulo Ck pode ser identi�cado com
Ck = ⊕xHk(Nx, Lx;Z)

31
onde a soma varia entre todos os pontos críticos de índice k.
Seguindo Floer de�nimos
M(x, y) = W u(y) ∩W s(x)
união das órbitas conectando x a y. Esse conjunto é uma subvariedade de M de dimensão
ind(x)-ind(y) já que ϕ é Morse. Além disso, se ind(x)-ind(y) = 1
S(x, y) = M(x, y) ∪ {x, y}
é um conjunto invariante isolado. Seja (N2, N0) um par-índice para S(x, y) e de�namos
N1 = N0 ∪ (N2 ∩Mc), onde f(y) < c < f(x). Então (N2, N1) é um par-índice para x e
(N1, N0) é um par-índice para y. De�namos o homomor�smo
∆k(x, y) : Hk(Nx, Lx) → Hk−1(Ny, Ly)
como sendo a composição
Hk(Nx, Lx) // Hk(N2, N1)∂ // Hk−1(N1, N0) // Hk−1(Ny, Ly)
onde o primeiro e o terceiro isomor�smos são induzidos pela equivalência de homoto-
pia entre dois pares índices de um mesmo conjunto invariante isolado. Isto determina um
homomor�smo
∆k : Ck → Ck−1
que é um caso especial de matriz de conexão.
Mostremos que este operador coincide com o operador de Milnor e Witten.
Lema 1.6.16. ∂c = ∆.
Demonstração: Alterando a função f fora de uma vizinhança isolante de S(x, y),
podemos assumir que x e y são os únicos pontos críticos em f−1(a, b), onde a = f(y)
e b = f(x). Mais precisamente, seja S o conjunto de todos os pontos críticos z 6= x
com ind(z) ≥ ind(x) juntamente com suas órbitas conectantes. Então S é um repulsor e,

32
portanto, existe uma função g : M → R tal que N = g−1([0,∞)) é uma vizinhança isolante
para S e dg(z)∇f(z) > 0 para z ∈ ∂N = g−1(0).
Seja ε su�cientemente pequeno e ρ : R → [0, 1] satisfazendo ρ(r) = 0 para r ≤ 0 e
ρ(r) = 1 para r ≥ ε. De�nimos fC : M → R
fC(z) = f(z) + Cρ(g(z))
Então fC tem os mesmos pontos críticos que f para todo valor positivo C. Tomando ε su�ci-
entemente pequeno podemos assumir que g(z) ≥ ε para todo z ∈ S e portanto ρ(g(z)) = 1.
Então dado z ∈ S, escolhemos C > b− inf(f) e então temos
fC(z) = f(z) + C > f(z) + b− inf(f) > b
e, portanto, S ⊂ f−1C ((b,∞)). Um argumento análogo pode ser usado para singularidades
z 6= y com ind(z) ≤ ind(y). Tais alterações não afetam os homomor�smos ∂c e ∆.
Dados a < c < b, um ε su�cientemente pequeno e um T su�cientemente grande, de�ni-
mos:
Nx = {z ∈M | f(ϕ−T (z)) ≤ b+ ε, f(z) ≥ c}
Ny = {z ∈M | f(ϕT (z)) ≥ a− ε, f(z) ≤ c}
Lx = {z ∈ Nx | f(z) = c}
Ly = {z ∈ Ny | f(ϕT (z)) = a− ε}
Então um trio-índice para o par atrator-repulsor y, x no conjunto invariante isolado
S(x, y) é dado por
N2 = Ny ∪Nx, N1 = Ny ∪ Lx, N0 = Ly ∪ Lx \Ny
Note que Nx pode ser contraído para W u(x) ∩ {f ≥ c} tomando T → ∞. Da mesma
forma Ny é uma vizinhança tubular de W s(y)∩{f ≤ c} cuja largura converge a zero quando
T →∞. Como W u(x) e W s(y) se intersectam transversalmente, então Ny ∩W u(x) ∩ {f =
c} é constituído por �nitas componentes V1, . . . , Vm, cada uma contendo um único ponto

33
zj ∈ M(x, y) ∩ Vj. Mais precisamente, seja Dk−1 a bola fechada em Rk−1. Existe um
difeomor�smo
ψy : Ny → Dk−1 ×Dn−k+1
tal que
ψy(Ly) = ∂Dk−1 ×Dn−k+1
ψy(Ws(y) ∩Ny) = {0} ×Dn−k+1
ψy(Vj) = Dk−1 × {θj}
onde θj ∈ ∂Dn−k+1. Em particular, Vj é uma k − 1 variedade com bordo Wj = Vj ∩ Ly,
difeomorfa a Dk−1 via ψj = π1 ◦ ψy
∣∣Vj
: Vj → Dk−1. A aplicação π1 ◦ ψy : Ny → Dk−1 induz
um isomor�smo em homologia
Hk−1(Ny, Ly) ∼= Hk−1(Dk−1, ∂Dk−1) ∼= Hk−1(Vj,Wj)
A orientação dada em Eu(y) determina um gerador da homologia α ∈ Hk−1(Ny, Ly) ∼= Z
que, pelo isomor�smo acima é levado em αj ∈ Hk−1(Vj,Wj). A classe de homologia de αj
é determinada pela orientação de TzjVj herdada pela orientação de Eu(y) via o isomor�smo
de�nido pelo �uxo TzjVj → Eu(y) que pode ou não coincidir com aquela herdada de W u(x)
via a injeção
TzjVj = Tzj
W u(x) ∩∇f(zj)⊥ ⊂ Tzj
W u(x)
(tomando −5 f(zj) como primeiro vetor da base). Assim, ambas as orientações coincidem
se e somente se nj = 1, onde nj ∈ {−1,+1} é o sinal associado à órbita conectante γj(s) =
ϕs(zj).
Escolhemos uma triangulação para as k − 1-variedades Vj e estendemos a uma triangu-
lação para a k variedade W u(x) ∩ {f ≥ c} com bordo W u(x) ∩ {f = c}. Juntamente com a
orientação de W u(x), isto determina um gerador
βj ∈ Hk(Wu(x) ∩Nx,W
u(x) ∩ Lx) ∼= Hk(Nx, Lx)
A classe de homologia de ∂βj ∈ Hk−1(Wu(x) ∩ Lx,W u(x) ∩ Lx \ Vj) ∼= Hk−1(Vj,Wj) é
representada pela triangulação original de Vj junto com a orientação herdada de W u(x) e,

34
portanto, coincide com njαj. Pelo isomor�smo Hk−1(Ny, Ly) ∼= Hk−1(Vj,Wj) obtemos
∆β =m∑
j=1
njα = n(x, y)α ∈ Hk−1(Ny, Ly)
Detalhes da demonstração do Teorema 1.6.15 bem como uma discussão sobre sua história
se encontram em [Sa2].
Demonstração: [do Teorema 1.6.15] Para j ≤ k, seja Skj a união dos conjuntos
M(x, y) de todos os pares de pontos críticos de f com j ≤ ind(y) ≤ ind(x) ≤ k. Estes
conjuntos são compactos, já que o �uxo gradiente é do tipo Morse-Smale.
Temos que o conjunto Skj é um invariante isolado para j ≤ k. Em particular, Sn0 = M
e Skk são todos os pontos críticos de índice k. Então existe uma �ltração-índice N0 ⊂ N1 ⊂
· · · ⊂ Nn tal que Nn = M e (Nk, Nj−1) é um par-índice para Skj com j ≤ k e N−1 = ∅.
Segue do Lema 1.6.16 temos que existe um diagrama comutativo
Ck+1
��
∂ck+1 // Ck
��
∂ck // Ck−1
��Hk+1(Nk+1, Nk)
∂k+1 // Hk(Nk, Nk−1)∂k // Hk−1(Nk−1, Nk−2)
onde os isomor�smos verticais são dados pela invariância do par-índice. Segue que
∂ck ◦ ∂c
k+1 = 0
Como Hj(Nk, Nk−1) = 0 para j 6= k, segue da seqüência exata em homologia que a
aplicação induzida pela inclusão Hj(Nk) → Hj(Nk+1) é um isomor�smo para j 6= k, k + 1.
Isso mostra Hj(Nk) → Hj(M) é um isomor�smo para j < k e Hj(Nk) = 0 para j > k. A
última igualdade mostra que no diagrama comutativo
0
��0 // Hk(Nk) // Hk(Nk, Nk−1)
∂ //
∂
))SSSSSSSSSSSSSSHk−1(Nk−1)
��Hk−1(Nk−1, Nk−2)

35
a seqüências horizontais e verticais são exatas. Em particular o homomor�smoHk−1(Nk−1) →
Hk−1(Nk−1, Nk−2) é injetivo e, portanto, o núcleo dos dos homomor�smos bordo coincidam.
Estes são isomorfos a ambos Hk(Nk) e Ker ∂ck ⊂ Ck. Concluímos que a seqüência exata em
homologia
0 // Hk+1(Nk+1, Nk)∂k // Hk(Nk) //// Hk(Nk+1) // 0
é isomorfa à seqüência exata
0 // Ck+1
∂ck // Ker∂c
k// Hk(M) // 0
Note que o Teorema vale se Z é substituído por qualquer grupo G.
1.7 Seqüências Espectrais
Leray introduziu em 1946 as seqüências espectrais como uma técnica computacional para o
estudo de propriedades de homologia e cohomologia . Esta ferramenta passou a ter muitas
outras aplicações na topologia algébrica e, posteriormente, na teoria de Morse e na teoria
de Floer. Uma seqüência espectral é uma seqüência de complexos de cadeia tal que cada
um dos quais é o módulo de homologia do anterior. Existe um módulo limite associado e a
seqüência espectral é vista como uma seqüência de aproximações para este módulo limite.
As referências para esta seção são [B], [D] e [Sp].
1.7.1 De�nição e propriedades básicas
Um módulo bigraduado E sobre um domínio de ideais principais R é uma coleção indexada
de R-módulos Ep,q para todo par de inteiros p e q. Uma diferencial d de bi-grau (−r, r − 1)
é uma coleção de homomor�smos d : Ep,q → Ep−r,q+r−1 para todo p e q, tal que d2 = 0. O
módulo de homologia H(E) é um módulo bigraduado de�nido por
Hp,q(Er) =
Kerdr : Erp,q → Er
p−r,q+r−1
Imdr : Erp+r,q−r+1 → Er
p,q

36
Notemos que d de�ne um homomor�smo
∂ :⊕
p+q=k
Ep,q →⊕
p+q=k−1
Ep,q
tal que {⊕p+q=kEp,q, ∂} é um complexo de cadeias. Além disso, o k-ésimo módulo de homo-
logia desse complexo de cadeias é igual a ⊕p+q=kHp,q(E).
De�nição 1.7.1. Uma seqüência espectral {Er, dr}, r ≥ 0, é uma seqüência de complexos
de cadeia onde cada complexo Er é o módulo de homologia do anterior, ou seja,
1. Er é um módulo bigraduado e dr é uma diferencial de bi-grau (−r, r − 1) em Er;
2. Para r ≥ 0 existe um isomor�smo H(E) ≈ Er+1.
Existe uma técnica de visualização que deixa a estrutura da seqüência espectral mais
clara. Temos três índices, r, p, e q. Para cada r, imagine que temos uma folha de papel
quadriculada e tomamos p na direção horizontal e q na direção vertical.
E0
•E00,3 •E0
1,3 •E02,3 •E0
3,3
•E00,2 •E0
1,2 •E02,2 •E0
3,2
•E00,1 •E0
1,1 •E02,1
d0
��
•E03,1
•E00,0 •E0
1,0 •E02,0 •E0
3,0

37
E1 E2
•E10,3 •E1
1,3 •E12,3 •E1
3,3
•E10,2 •E1
1,2 •E12,2 •E1
3,2
•E10,1 •E1
1,1 •E12,1d1
oo •E13,1
•E10,0 •E1
1,0 •E12,0 •E1
3,0
•E20,3 •E2
1,3 • E22,3 • E2
3,3
•E20,2 •E2
1,2 • E22,2 • E2
3,2
•E20,1 •E2
1,1 • E22,1 • E2
3,1
d2
iiSSSSSSSSSSSSSSSS
•E20,0 •E2
1,0 • E22,0 • E2
3,0
A cada ponto associamos um Erp,q. É muito comum k = p + q ser outro índice natural
na seqüência espectral. O índice k é constante em cada diagonal, noroeste para sudeste, em
cada folha. Como as diferenciais têm bi-grau (−r, r − 1), então quando passamos de uma
diagonal para outra diagonal a sudoeste, k decresce por um. Quando r é zero, a diferencial
dr move objetos um espaço para baixo. Quando r é um, a diferencial move objetos um
espaço para esquerda, semelhante à diferencial em um complexo de cadeias. Quando r é
dois, a diferencial move objetos assim como o cavalo se move no xadrez. Para r maior, a
diferencial age como movimento de cavalos generalizados.
Observemos que se Erp,q = 0 para algum par �xado (p, q) então Er+ξ
p,q = 0 para todo ξ ≥ 0.
Um homomor�smo ψ : E → E ′ de uma seqüência espectral E para uma E ′ é uma
coleção de homomor�smos ψr : Erp,q → E ′r
p,q para todos os p e q que comutam com as
diferenciais e tal que ψr∗ : H(Er) → H(E ′r) corresponde a ψr+1 : Er+1 → E ′r+1 pelos
isomor�smos H(Er) ≈ Er+1 da seqüência espectral.
Para de�nir o termo limite de uma seqüência espectral, seja Z0 o módulo bigraduado
Z0p,q = Kerd0
p,q : E0p,q → E0
p,q−1 e B0 o módulo bigraduado B0p,q = Imd0
p,q+1 : E0p,q+1 → E0
p,q.
Então B0 ⊂ Z0 e E1 = Z0/B0. Sejam Z(E1)p,q = Kerd1p,q : E1
p,q → E1p−1,q e B(E1)p,q =
Imd1p+1,q : E1
p+1,q → E1p,q. Pelo Teorema do isomor�smo de Noether, existem submódulos
bigraduados Z1 e B1 de Z0 contendo B0 tais que Z(E1)p,q = Z1p,q/B
0p,q e B(E1)p,q = B1
p,q/B0p,q

38
para todo p e q. Segue que B1 ⊂ Z1 e temos
B0 ⊂ B1 ⊂ Z1 ⊂ Z0
Utilizando o mesmo raciocínio e continuando por indução obtemos submódulos
B0 ⊂ B1 ⊂ . . . ⊂ Br ⊂ . . . ⊂ Zr ⊂ . . . ⊂ Z1 ⊂ Z0
tais que Er+1 = Zr/Br. De�nimos então os módulos bigraduados Z∞ = ∩rZr, B∞ = ∪rB
r
e E∞ = Z∞/B∞. O módulo bigraduado E∞ é chamado de limite da seqüência espectral
{Er, dr} e os termos Er da seqüência espectral são aproximações sucessivas de E∞.
Uma seqüência espectral é convergente se dados p e q existe um inteiro r(p, q) ≥ 0 tal
que para r ≥ r(p, q), drp,q : Er
p,q → Erp−r,q+r−1 é trivial.
Uma seqüência espectral é fortemente convergente se dados p e q existe r(p, q) ≥ 0 tal que
Erp,q ≈ E∞
p,q para todo r ≥ r(p, q). Por exemplo, se {Er, dr} tem a propriedade de que para
algum r existem inteiros N e N ′ tais que Erp,q = 0 para p < N ou q < N ′, então a seqüência
espectral é fortemente convergente. De fato, se Erp,q = 0 para p < N ou q < N ′ então Er′
p,q = 0
para todo r′ > r. Então, dados p e q, escolhemos r′ tal que r′ > sup(p − N, q − N ′ + 1).
Assim temos
Er′
p+r′,q−r′+1dr′
// Er′p,q
dr′// Er′
p−r′,q+r′−1
onde o primeiro módulo é igual a zero, pois q− r′ + 1 > N ′ e o último módulo é igual a zero
pois p− r′ < N . Portanto
Er′
p,q ≈ Er′+1p,q ≈ . . . ≈ E∞
p,q
1.7.2 Seqüência Espectral num complexo de cadeias �ltrado
Seja R um domínio de ideais principais.
De�nição 1.7.2. Uma �ltração crescente F em um R-módulo A é uma seqüência de sub-
módulos FpA para todos os inteiros p tal que FpA ⊂ Fp+1A. Se A é um módulo graduado,
ou seja, A = {Aq} é uma coleção de R-módulos indexada por inteiros, a �ltração deve ser
compatível com a graduação, ou seja, FpA é graduado por {FpAq}.

39
Dada uma �ltração F em A, o módulo graduado associado G(A) é de�nido por
G(A)p =FpA
Fp−1A
Se A é um módulo graduado, o módulo associado G(A) é um módulo bigraduado
G(A)p,q =FpAp+q
Fp−1Ap+q
A �ltração F é convergente se ∩pFpA = 0 e ∪FpA = A. A �ltração F é �nita se FpA = 0
para algum p e Fp′A = A para algum p′. É claro que toda �ltração �nita é convergente.
Nas �ltrações convergentes, o módulo graduado associado G(A) está mais amarrado a A do
que em �ltrações arbitrárias. No entanto, mesmo no caso das �ltrações �nitas, o módulo
associado G(A) não determina A. Em uma �ltração �nita:
i- Se G(A) = 0 então A = 0.
ii- Se R é um corpo e A é um espaço vetorial de dimensão �nita, então cada Fp é um
subespaço e G(A) e A têm a mesma dimensão. Portanto, neste caso G(A) determina
A a menos de isomor�smo. O mesmo vale para R mais geral se cada G(A)p é livre.
Uma �ltração F em um complexo de cadeias C é uma �ltração compatível com a gra-
duação de C e com a diferencial de C, ou seja, cada FpC é um subcomplexo de C da forma
{FpCq}. A �ltração F em C induz uma �ltração F em H∗(C) de�nida por
FpH∗(C) = Im[H∗(FpC) → H∗(C)]
Uma �ltração F no módulo graduado A é limitada inferiormente se, dado q, existe p(q)
tal que Fp(q)Aq = 0. Se F é uma �ltração limitada inferiormente em um complexo de cadeias
C, então a �ltração induzida em H∗(C) também é limitada inferiormente. Portanto, se F é
uma �ltração convergente em C e limitada inferiormente, ou seja, dado q existe p(q) tal que
Fp(q)Cq = 0, então o mesmo é verdade para a �ltração induzida em H∗(C).
O teorema seguinte associa uma seqüência espectral a uma �ltração em um complexo de
cadeias. Sua demonstração se encontra em [Sp].

40
Teorema 1.7.3. Seja F uma �ltração convergente limitada inferiormente em um complexo
de cadeias C. Existe uma seqüência espectral convergente com
E0p,q = FpCp+q/Fp−1Cp+q = G(C)p,q
E1p,q ≈ H(p+ q)(FpCp+q/Fp−1Cp+q)
e E∞ é isomorfa ao módulo GH∗(C).
A idéia da demonstração é de�nir para cada r arbitrário
Zrp = {c ∈ FpC | ∂c ∈ Fp−rC}
Z∞p = {c ∈ FpC | ∂c = 0}
que são módulos graduados com
Zrp,q = {c ∈ FpCp+q | ∂c ∈ Fp−rCp+q}
Z∞p,q = {c ∈ FpCp+q | ∂c = 0}
Temos então uma seqüência de módulos graduados
. . . ⊂ ∂Z−1p−1 ⊂ ∂Z0
p ⊂ ∂Z1p+1 ⊂ . . . ⊂ ∂C ∩ FpC ⊂ Z∞p ⊂ . . . ⊂ Z1
p ⊂ Z0p = FpC
Com isso, [Sp] de�ne os módulos bigraduados
Erp = Zr
p/(Zr−1p−1 + ∂Zr−1
p+r−1)
E∞p = Z∞p /(Z
∞p−1 + ∂C ∩ FpC)
A aplicação ∂ manda Zrp em Zr
p−r e Zr−1p−1 + ∂Zr−1
p+r−1 em ∂Zr−1p−1 . Portanto ∂ induz o
homomor�smo
dr : Erp → Er
p−r
Notemos que E∞ não determina H∗(C) completamente, mas temos
E∞p,q ≈ GH∗(C)p,q =
FpHp+q(C)
Fp−1Hp+q(C)

Capítulo 2
Método da Varredura
2.1 Contextualização
Sejam M uma variedade compacta suave Riemanniana n-dimensional e D(M) = {Mp}mp=1
uma decomposição de Morse deM . Consideremos o caso em que um complexo de cadeias de
Conley com a �ltração mais �na é na verdade um complexo de Morse, ou seja, cada conjunto
de Morse, Mp, é uma singularidade hiperbólica do gradiente de uma função de Morse com
�uxo ϕ. Orientamos as variedades instável e estável. Dados x uma singularidade de índice
k e y uma singularidade de índice k − 1 o conjunto das órbitas conectantes é �nito. Seja
n(x, y) o número de órbitas contadas com orientação. Para contar órbitas com orientação,
escolha c um valor regular de f com f(y) < c < f(x) e seja n(x, y) o número de intersecção
das esferas Sk−1 = W u(x) ∩ f−1(c) e Sn−k = W s(y) ∩ f−1(c). Temos então o Z-módulo
graduado
Ck =⊕
ind(x)=Σk
Z〈x〉
gerado pelas singularidades e graduado por seus índices.
A diferencial ∆ desse complexo de Morse C(ϕ) é uma matriz de conexão dada por:
• ∆ : C(ϕ) → C(ϕ) com ∆ ◦∆ = 0.
41

42
Ck−1 Ck Ck+1 Ck+2
0
Ck−2 0
0
Ck−1 0
0
Ck 0
0
Ck+1 0
0
0
0
0
∂k−1
∂k
∂k+1
∂k+2
0
0
Figura 2.1: Matriz de conexão.
• ∆ é uma matriz triangular superior dada pelas aplicações ∆k : Ck → Ck−1 via
∆k(x) =∑
ind(y)=Σk−1
n(x, y)〈y〉
onde n(x, y) é o número de intersecção das esferas Sk−1 = W u(x) ∩ f−1(c) e Sn−k =
W s(y) ∩ f−1(c).
Usamos a mesma notação para a aplicação ∆k que são submatrizes de ∆. Veja a Figura
2.1.
Notemos que as colunas da matriz ∆ não precisam estar necessariamente ordenadas com
relação a k, mas apenas exigimos que a aplicação ∆k preserve a �ltração.
Denotemos este complexo de cadeias graduado de Morse por
(C,∆) = (Z〈critf〉,∆)
As notações de operador de bordo ∂ e de sua matriz ∆ serão usadas indistintamente.
Notemos que a r-ésima diagonal auxiliar de ∆ tem entradas ∆p+1−r,p+1 que representam
o número de intersecção das esferas instáveis e estáveis determinadas pelas conexões entre
variedades instáveis e estáveis de Mp+1 e Mp+1−r para p ∈ {r, . . . ,m−1}. Se a (p+1)-ésima
coluna intercepta a submatriz ∆k, então Mp+1 e Mp+1−r são singularidades de Morse com

43
índices k e k − 1 respectivamente, as quais denotamos por hk e hk−1. Estas singularidades
estão nas �ltrações Fp \ Fp−1 e Fp−r \ Fp−r−1 respectivamente. Logo dizemos que o par
(hk, hk−1) tem gap r. Assim, a r-ésima diagonal auxiliar quando interceptada por ∆k registra
informação de singularidades numericamente consecutivas de índices de Morse k e k − 1.
Usamos a mesma notação para indicar a cadeia elementar de C(ϕ).
A uma cadeia elementar hk ∈ Fp\Fp−1 associamos a (p+1)-ésima coluna de ∆. Notemos
que a numeração das colunas está deslocada por um com relação ao índice p da �ltração p.
Neste trabalho, explicamos como a matriz de conexão ∆ determina a seqüência espectral,
ou seja, como ∆ determina os espaços Er e como induz as diferenciais dr.
Como vimos na seção 1.7, o complexo de cadeias �ltrado graduado C(ϕ) determina uma
seqüência espectral (Er, dr) tal que Er é o módulo bigraduado sobre Z
Erp,q = Zr
p,q/(Zr−1p−1,q+1 + ∂Zr−1
p+r−1,q−r+2)
onde,
Zrp,q = {c ∈ FpCp+q | ∂c ∈ Fp−rCp+q−1}
e dr : Erp,q → Er
p−r,q+r−1 é uma diferencial de bi-grau (−r, r − 1).
Em alguns casos omitiremos a referência a q, pois seu papel é importante quando con-
sideramos uma decomposição de Morse mais geral. Quando o conjunto de Morse é uma
singularidade de índice k, o único q tal que Erp,q é não nulo é q = k − p. Portanto, nestes
casos �ca entendido que Erp é de fato Er
p,k−p.
Assim, o módulo Zrp consiste de cadeias em FpC cujos bordos estão em Fp−rC. É natural
olhar para as cadeias associadas a colunas da matriz de conexão que estão à esquerda da
(p + 1)-ésima coluna (incluindo a mesma). Isto garante que qualquer combinação linear de
cadeias respeita a �ltração. Além disso, como os bordos das cadeias devem estar em Fp−rC,
devemos considerar as colunas ou combinações lineares das mesmas que respeitem a �ltração
e que tenham a propriedade de que as entradas em linhas i > (p− r+ 1) sejam todas nulas.
Conforme r cresce, os Z-módulos Erp mudam de geradores. A�m de conectar esta mu-
dança algébrica de geradores de Z-módulos da seqüência espectral a uma família particular
de matrizes obtidas por mudanças de base sobre Q a partir da da matriz de conexão ∆,

44
apresentamos o algoritmo de varredura para a matriz de conexão associada ao complexo
de Morse C. O método da varredura destaca algumas entradas não nulas importantes na
r-ésima diagonal auxiliar de ∆r que chamamos de pivôs primários e pivôs mudança de
base. Tais entradas determinam uma matriz do próximo estágio, ∆r+1, e são signi�cativas
na determinação dos geradores de Er em termos da base original de C e das diferenciais
drp : Er
p → Erp−r. A cada passo, ∆r+1 é uma mudança de base sobre Q de ∆r.
Dada uma entrada não nula ∆p−r+1,p+1 em ∆, existe uma órbita conectante unindo
duas singularidades. Por outro lado, se ∆p−r+1,p+1 é zero, as técnicas desenvolvidas nesse
trabalho nos permitem veri�car que existe um caminho unindo as singularidades hk ∈ Fp e
hk−1 ∈ Fp−r quando ∆p−r+1,p+1 corresponde a drp 6= 0.
2.2 Construção da família ∆r
Nesta seção apresentamos o método da varredura, que constrói recursivamente uma família
de matrizes ∆r para r ≥ 0, tais que ∆0 = ∆ é uma matriz de conexão, considerando no
r-ésimo passo a r-ésima diagonal auxiliar. Esta família de matrizes é usada para determinar
a seqüência espectral (Er, dr).
Observemos que o método da varredura, bem como todos os outros teoremas neste tra-
balho, não exige que as colunas da matriz ∆ estejam ordenadas com relação a k, ou seja, que
as singularidades hk estejam ordenadas com relação à �ltração. Sem perda de generalidade,
assumimos que as singularidades estejam ordenadas com relação à �ltração no intuito de
simpli�car a notação permitindo que os índices referentes às colunas cresçam de um em um.
No entanto, em uma situação mais geral, podemos introduzir uma notação de subseqüência
para as colunas, considerando apenas a intersecção das diagonais auxiliares com as colu-
nas associadas a singularidades de índice k. Por simplicidade, em nossos exemplos também
mantemos as singularidades ordenadas com relação à �ltração.
Fixada uma diagonal auxiliar r, o método descrito abaixo deve ser aplicado para todo k
simultaneamente.

45
Passo Inicial
1. Considere todas as colunas hk junto com todas as linhas hk−1 em ∆. Sejam ∆ki,j
as entradas de ∆ tais que a i-ésima linha é hk−1 e a j-ésima coluna é hk.
Seja ξ1 a primeira diagonal auxiliar de ∆ que contém entradas não nulas ∆ki,j.
Tais entradas serão chamadas de k pivôs primários. Assim, para cada ∆ki,jnão
nulo em ξ1 as entradas ∆ks,jpara s > i são todas nulas, pois caso contrário as
mesmas teriam sido detectadas como pivôs primários em uma diagonal auxiliar ξ
para ξ < ξ1.
Encerramos este primeiro passo de�nindo ∆ξ1 como sendo ∆ com todos os k pivôs
primários da ξ1-ésima diagonal auxiliar marcados.
2. Consideremos a matriz ∆ξ1 e sejam ∆ξ1ki,j
as entradas em ∆ξ1 tais que a i-ésima
linha é hk−1 e a j-ésima coluna é hk. Seja ξ2 a primeira diagonal auxiliar maior
que ξ1 que contém entradas não nulas ∆ξ1ki,j
. Construímos a matriz ∆ξ2 seguindo
o procedimento abaixo:
Dada uma entrada ∆ξ1ki,j
não nula na ξ2-ésima diagonal auxiliar de ∆ξ1
(a) se não existem pivôs primários na i-ésima linha e j-ésima coluna, marque
∆ξ1ki,j
como um k pivô primário e o valor numérico desta entrada permanece
o mesmo, ou seja, ∆ξ2ki,j
= ∆ξ1ki,j
.
(b) caso contrário, considere as entradas na j-ésima coluna e na s-ésima linha
com s > i em ∆ξ1 .
(b1) Se existe um k pivô primário em uma entrada na j-ésima coluna e na
s-ésima linha, com s > i, então o valor numérico de ∆ξ1ki,j
permanece o
mesmo e tal entrada não é marcada, ou seja, ∆ξ2ki,j
= ∆ξ1ki,j
.
(b2) Se não existem pivôs primários na j-ésima coluna abaixo de ∆ξ1ki,j
então
existe um k pivô primário na i-ésima linha, digamos na t-ésima coluna de
∆ξ1 , com t < j. Neste caso, o valor numérico da entrada ∆ξ1ki,j
permanece
o mesmo, mas no entanto este é marcado como pivô mudança de base,

46
ou seja, ∆ξ2ki,j
= ∆ξ1ki,j
.
Notemos que ∆ξ2 é na verdade igual a ∆ξ1 exceto pelas entradas da ξ2-
ésima diagonal auxiliar marcadas com pivôs primários e mudanças de
base. Veja Figura 2.2.
h(`)k h
(`+1)k h
(`+2)k h
(`+3)k h
(`+4)k
h(s)k−1 2 1
h(s+1)k−1 0 0 1
h(s+2)k−1 0 0 3 2
h(s+3)k−1 0 0 0 0 1
h(s+4)k−1 0 0 0 0 0
ξ2
ξ1
Figura 2.2: Diagonais Auxiliares ξ1 e ξ2
Passo Intermediário
Neste passo, consideramos a matriz ∆r com os pivôs primários e mudanças de base
marcados na ξ-ésima diagonal auxiliar para todo ξ ≤ r. Vamos descrever agora como
a matriz ∆r+1 é de�nida. Sem perda de generalidade, podemos supor que existe pelo
menos um pivô mudança de base na r-ésima diagonal auxiliar, pois caso contrário
∆r+1 = ∆r com a (r+1)-ésima diagonal auxiliar marcada com pivôs primários e pivôs
mudança de base.

47
Mudança de Base
Suponhamos que ∆rki,j
é um pivô mudança de base. Então realizamos uma mudança
de base em ∆r adicionando uma combinação linear em Q de todas as hk colunas ` de
∆r, com κ ≤ ` < j, onde κ é a primeira coluna de ∆r associada a uma k-cadeia, a
um múltiplo inteiro positivo u 6= 0 da j-ésima coluna de ∆r, com o objetivo de zerar a
entrada ∆rki,j
sem introduzir entradas não nulas da forma ∆rks,j
para s > i. Além disso,
a combinação linear resultante deve ser da forma βκh(κ)k + · · ·+βj−1h
(j−1)k +βjh
(j)k com
β` inteiro para ` = κ, . . . , j. A notação h(`)k indica a k-cadeia elementar associada a
`-ésima coluna de ∆.
O inteiro u é chamado coe�ciente líder da mudança de base. Se mais que uma combi-
nação linear for possível, escolhemos aquela que minimiza u. Seja u o coe�ciente líder
minimal de uma mudança de base. Uma vez que a mudança de base é feita, obtemos
uma k-cadeia associada a j-ésima coluna de ∆r+1 que é uma combinação linear em
Q das `-ésimas hk colunas κ ≤ ` < j de ∆r mais um múltiplo inteiro u da j-ésima
coluna de ∆r tal que ∆r+1ki,j
= 0. Além disso esta combinação linear é também uma
combinação linear inteira de colunas hk de ∆ a à esquerda da j-ésima coluna.
Observe que se a `-ésima coluna de ∆r é uma hk coluna, então corresponde a uma
combinação linear inteira σ(`),rk =
∑`=κ
c`,r` h(`)k de hk colunas de ∆ tal que a κ-ésima
coluna é a primeira coluna de ∆ associada a uma k-cadeia. A notação de σ(`),rk indica
índice de Morse k e a `-ésima coluna de ∆r. Portanto, se a j-ésima coluna ∆r+1 é uma
hk coluna, então será da forma
σ(j),r+1k =u
j∑`=κ
cj,r` h(`)k︸ ︷︷ ︸
σ(j),rk
+qj−1
j−1∑`=κ
cj−1,r` h
(`)k︸ ︷︷ ︸
σ(j−1),rk
+ · · ·+qκ+1 (cκ+1,rκ h
(κ)k +cκ+1,r
κ+1 h(κ+1)k )︸ ︷︷ ︸
σ(κ+1),rk
+qκ cκ,rκ h
(κ)k︸ ︷︷ ︸
σ(κ),rk
(2.1)
ou, equivalentemente,
(ucj,rκ + qj−1cj−1,rκ + · · ·+ qκc
κ,rκ )h
(κ)k + (ucj,rκ+1 + qj−1c
j−1,rκ+1 + · · ·+ qκ+1c
κ+1,rκ+1 )h
(κ+1)k + · · ·

48
· · ·+ (ucj,rj−1 + qj−1cj−1,rj−1 )h
(j−1)k + ucj,rj h
(j)k (2.2)
com cκ,rκ = 1 e
cj,r+1κ = ucj,rκ + qj−1c
j−1,rκ + · · ·+ qκc
κ,rκ ∈ Z (2.3)
cj,r+1κ+1 = ucj,rκ+1 + qj−1c
j−1,rκ+1 + · · ·+ qκ+1c
κ+1,rκ+1 ∈ Z (2.4)
...
cj,r+1j−1 = ucj,rj−1 + qj−1c
j−1,rj−1 ∈ Z (2.5)
cj,r+1j = ucj,rj ∈ Z (2.6)
É claro que a primeira coluna de qualquer ∆k não pode sofrer nenhuma mudança de
base, já que não existem hk colunas a sua esquerda, o que explica o porque cκ,rκ = 1.
Notemos que q` = 0 em q`∑`=1
c`,r` h(`)k quando a `-ésima coluna tem um pivô primário
em uma linha s para s > i.
Se o pivô primário da i-ésima linha está na t-ésima coluna então o número racional qt
é não nulo emt∑
`=1
ct,r` h(`)k e é tal que
∆r+1ki,j
= u∆rki,j
+ qt∆rki,t
= 0
Como u ≥ 1 é único, então qt é unicamente de�nido.
Uma vez que o processo acima é feito para todos os pivôs mudança de base da r-ésima
diagonal auxiliar de ∆r, podemos então de�nir uma matriz mudança de base.
Portanto a matriz ∆r+1 tem valores numéricos determinados por uma mudança de
base em Q de ∆r. Em particular, todos os pivôs mudança de base na r-ésima diagonal
auxiliar de ∆r são iguais a zero em ∆r+1. Veja as Figuras 2.3 e 2.4.

49
σ(`),rk σ
(`+1),rk σ
(`+2),rk σ
(`+3),rk σ
(`+4),rk σ
(`+5),rk
σ(s),rk−1 2 1 3
σ(s+1),rk−1 0 0 1 1
σ(s+2),rk−1 0 0 3 2 2
σ(s+3),rk−1 0 0 0 0 1 5
σ(s+4),rk−1 0 0 0 0 0 0
r
r + 1
Figura 2.3: Método da varredura: ∆r
Marcando a (r + 1)-ésima diagonal de ∆r+1
Consideremos a matriz ∆r+1 de�nida no passo anterior. Marcamos a (r + 1)-ésima
diagonal auxiliar com pivôs primários e mudança de base como segue:
Dada uma entrada não nula ∆r+1ki,j
1. se não existem pivôs primários na i-ésima linha e nem na j-ésima coluna, marca-
mos ∆r+1ki,j
como um pivô primário de índice k.
2. se este não é o caso, consideremos as entradas na j-ésima coluna e na s-ésima
linha com s > i em ∆r+1.
(b1) Se existe um k pivô primário na j-ésima coluna abaixo de ∆r+1ki,j
então este
não é marcado.
(b2) Se não existem k pivôs primários na j-ésima coluna abaixo de ∆r+1ki,j
então
existe um k pivô primário na i-ésima linha e em uma coluna t de ∆r+1, com

50
t < j. Neste caso, marque ∆r+1ki,j
como um pivô mudança de base. Veja a
Figura 2.4.
σ(`
),r+
1k
σ(`
+1),
r+
1k
σ(`
+2),
r+
1k
σ(`
+3),
r+
1k
σ(`
+4),
r+
1k
σ(`
+5),
r+
1k
σ(s
),r+
1k−
12
03
σ(s
+1),
r+
1k−
10
01
1
σ(s
+2),
r+
1k−
10
03
02
σ(s
+3),
r+
1k−
10
00
01
5
σ(s
+4),
r+
1k−
10
00
00
0
rr+
1
Figura 2.4: Método Varredura: ∆r+1

51
F0h0
F1
h(2)k−1
F2
h(3)k−1
F3
h(4)k
F4
h(5)k
F5
h(6)k
F6
h(7)k
F7
h(8)k
F8
h(9)k
F9
h(10)k+1
F10
h(11)k+1
F11
h(12)k+1
F12
h(13)k+1
F13hn
F0 h0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
F1 h(2)k−1 0 0 0 2 3 2 1 0 0 0 0 0 0 0
F2 h(3)k−1 0 0 0 2 3 1 0 2 1 0 0 0 0 0
F3 h(4)k 0 0 0 0 0 0 0 0 0 0 1 −3 1 0
F4 h(5)k 0 0 0 0 0 0 0 0 0 1 0 2 0 0
F5 h(6)k 0 0 0 0 0 0 0 0 0 −3 −2 1 −3 0
F6 h(7)k 0 0 0 0 0 0 0 0 0 3 2 −2 4 0
F7 h(8)k 0 0 0 0 0 0 0 0 0 −1 1 −2 1 0
F8 h(9)k 0 0 0 0 0 0 0 0 0 2 −2 3 −1 0
F9 h(10)k+1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
F10 h(11)k+1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
F11 h(12)k+1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
F12 h(13)k+1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
F13 hn 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Figura 2.5: ∆
Passo Final
Repetimos o procedimento acima até que todas as diagonais auxiliares tenham sido
consideradas.
Exemplo 2.2.1. Seja ∆ como na Figura 2.5. Aplicando o método varredura em ∆ obtemos
as matrizes ∆1, ∆2, ∆3, ∆4, ∆5, ∆6, ∆7 e ∆8 dadas pelas Figuras 2.6, 2.7, 2.8, 2.9, 2.10,
2.11, 2.12 e 2.13 respectivamente.
O leitor pode facilmente notar que o cálculo da família de matrizes produzidas pelo
método varredura é trabalhoso. Portanto, ao longo deste trabalho, ilustramos vários de
nossos resultados utilizando este único exemplo.

52
h0 h(2)k−1 h
(3)k−1 h
(4)k h
(5)k h
(6)k h
(7)k h
(8)k h
(9)k h
(10)k+1 h
(11)k+1 h
(12)k+1 h
(13)k+1 hn
h0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
h(2)k−1 0 0 0 2 3 2 1 0 0 0 0 0 0 0
h(3)k−1 0 0 0 2 3 1 0 2 1 0 0 0 0 0
h(4)k 0 0 0 0 0 0 0 0 0 0 1 −3 1 0
h(5)k 0 0 0 0 0 0 0 0 0 1 0 2 0 0
h(6)k 0 0 0 0 0 0 0 0 0 −3 −2 1 −3 0
h(7)k 0 0 0 0 0 0 0 0 0 3 2 −2 4 0
h(8)k 0 0 0 0 0 0 0 0 0 −1 1 −2 1 0
h(9)k 0 0 0 0 0 0 0 0 0 2 −2 3 −1 0
h(10)k+1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
h(11)k+1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
h(12)k+1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
h(13)k+1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
hn 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Figura 2.6: ∆1
h0 h(2)k−1 h
(3)k−1 h
(4)k h
(5)k h
(6)k h
(7)k h
(8)k h
(9)k h
(10)k+1 h
(11)k+1 h
(12)k+1 h
(13)k+1 hn
h0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
h(2)k−1 0 0 0 2 3 2 1 0 0 0 0 0 0 0
h(3)k−1 0 0 0 2 3 1 0 2 1 0 0 0 0 0
h(4)k 0 0 0 0 0 0 0 0 0 0 1 −3 1 0
h(5)k 0 0 0 0 0 0 0 0 0 1 0 2 0 0
h(6)k 0 0 0 0 0 0 0 0 0 −3 −2 1 −3 0
h(7)k 0 0 0 0 0 0 0 0 0 3 2 −2 4 0
h(8)k 0 0 0 0 0 0 0 0 0 −1 1 −2 1 0
h(9)k 0 0 0 0 0 0 0 0 0 2 −2 3 −1 0
h(10)k+1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
h(11)k+1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
h(12)k+1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
h(13)k+1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
hn 0 0 0 0 0 0 0 0 0 0 0 0 0 0
Figura 2.7: ∆2

53
σ(1
),3
0σ
(2),
3k−
1σ
(3),
3k−
1σ
(4),
3k
σ(5
),3
kσ
(6),
3k
σ(7
),3
kσ
(8),
3k
σ(9
),3
kσ
(10),
3k+
1σ
(11),
3k+
1σ
(12),
3k+
1σ
(13),
3k+
1σ
(14),
3n
σ(1
),3
0=
h0
00
00
00
00
00
00
00
σ(2
),3
k−
1=
h(2
)k−
10
00
20
21
00
00
00
0
σ(3
),3
k−
1=
h(3
)k−
10
00
20
10
21
00
00
0
σ(4
),3
k=
h(4
)k
00
00
00
00
03/
25/
20
10
σ(5
),3
k=
2h(5
)k−
3h(4
)k
00
00
00
00
01/
21/
21
00
σ(6
),3
k=
h(6
)k
00
00
00
00
0−
3−
51
−3
0
σ(7
),3
k=
h(7
)k
00
00
00
00
03
5−
24
0
σ(8
),3
k=
h(8
)k
00
00
00
00
0−
10
−2
10
σ(9
),3
k=
h(9
)k
00
00
00
00
02
03
−1
0
σ(1
0),
3k+
1=
h(1
0)
k+
10
00
00
00
00
00
00
0
σ(1
1),
3k+
1=
h(1
1)
k+
1+
h(1
0)
k+
10
00
00
00
00
00
00
0
σ(1
2),
3k+
1=
h(1
2)
k+
10
00
00
00
00
00
00
0
σ(1
3),
3k+
1=
h(1
3)
k+
10
00
00
00
00
00
00
0
σ(1
4),
3n
=h
n0
00
00
00
00
00
00
0
Figura 2.8: ∆3

54
σ(1
),4
0σ
(2),
4k−
1σ
(3),
4k−
1σ
(4),
4k
σ(5
),4
kσ
(6),
4k
σ(7
),4
kσ
(8),
4k
σ(9
),4
kσ
(10),
4k+
1σ
(11),
4k+
1σ
(12),
4k+
1σ
(13),
4k+
1σ
(14),
4n
σ(1
),4
0=
h0
00
00
00
00
00
00
00
σ(2
),4
k−
1=
h(2
)k−
10
00
20
11
00
00
00
0
σ(3
),4
k−
1=
h(3
)k−
10
00
20
00
21
00
00
0
σ(4
),4
k=
h(4
)k
00
00
00
00
00
01
−1/
20
σ(5
),4
k=
2h(5
)k−
3h(4
)k
00
00
00
00
0−
1−
26
−3/
20
σ(6
),4
k=
h(6
)k−
h(5
)k
+h
(4)
k0
00
00
00
00
−3
−5
11−
30
σ(7
),4
k=
h(7
)k
00
00
00
00
03
5−
134
0
σ(8
),4
k=
h(8
)k
00
00
00
00
0−
10
−1
10
σ(9
),4
k=
h(9
)k
00
00
00
00
02
00
−1
0
σ(1
0),
4k+
1=
h(1
0)
k+
10
00
00
00
00
00
00
0
σ(1
1),
4k+
1=
h(1
1)
k+
1+
h(1
0)
k+
10
00
00
00
00
00
00
0
σ(1
2),
4k+
1=
2h(1
2)
k+
1−
3h(1
0)
k+
10
00
00
00
00
00
00
0
σ(1
3),
4k+
1=
h(1
3)
k+
10
00
00
00
00
00
00
0
σ(1
4),
4n
=h
n0
00
00
00
00
00
00
0
Figura 2.9: ∆4

55
σ(1
),5
0σ
(2),
5k−
1σ
(3),
5k−
1σ
(4),
5k
σ(5
),5
kσ
(6),
5k
σ(7
),5
kσ
(8),
5k
σ(9
),5
kσ
(10),
5k+
1σ
(11),
5k+
1σ
(12),
5k+
1σ
(13),
5k+
1σ
(14),
5n
σ(1
),5
0=
h0
00
00
00
00
00
00
00
σ(2
),5
k−
1=
h(2
)k−
10
00
20
11
00
00
00
0
σ(3
),5
k−
1=
h(3
)k−
10
00
20
00
21
00
00
0
σ(4
),5
k=
h(4
)k
00
00
00
00
00
01
00
σ(5
),5
k=
2h(5
)k−
3h(4
)k
00
00
00
00
0−
1−
26
10
σ(6
),5
k=
h(6
)k−
h(5
)k
+h
(4)
k0
00
00
00
00
−3
−5
111
0
σ(7
),5
k=
h(7
)k
00
00
00
00
03
5−
13−
10
σ(8
),5
k=
h(8
)k
00
00
00
00
0−
10
−1
00
σ(9
),5
k=
h(9
)k
00
00
00
00
02
00
00
σ(1
0),
5k+
1=
h(1
0)
k+
10
00
00
00
00
00
00
0
σ(1
1),
5k+
1=
h(1
1)
k+
1+
h(1
0)
k+
10
00
00
00
00
00
00
0
σ(1
2),
5k+
1=
2h(1
2)
k+
1−
3h(1
0)
k+
10
00
00
00
00
00
00
0
σ(1
3),
5k+
1=
h(1
3)
k+
1+
h(1
2)
k+
1−
h(1
0)
k+
10
00
00
00
00
00
00
0
σ(1
4),
5n
=h
n0
00
00
00
00
00
00
0
Figura 2.10: ∆5

56
σ(1
),6
0σ
(2),
6k−
1σ
(3),
6k−
1σ
(4),
6k
σ(5
),6
kσ
(6),
6k
σ(7
),6
kσ
(8),
6k
σ(9
),6
kσ
(10),
6k+
1σ
(11),
6k+
1σ
(12),
6k+
1σ
(13),
6k+
1σ
(14),
6n
σ(1
),6
0=
h0
00
00
00
00
00
00
00
σ(2
),6
k−
1=
h(2
)k−
10
00
20
10
−2
00
00
00
σ(3
),6
k−
1=
h(3
)k−
10
00
20
00
01
00
00
0
σ(4
),6
k=
h(4
)k
00
00
00
00
0−
10
−3
00
σ(5
),6
k=
2h(5
)k−
3h(4
)k
00
00
00
00
0−
1−
25
10
σ(6
),6
k=
h(6
)k−
h(5
)k
+h
(4)
k0
00
00
00
00
00
−2
00
σ(7
),6
k=
h(7
)k−
h(6
)k
+h
(5)
k−
h(4
)k
00
00
00
00
03
5−
13−
10
σ(8
),6
k=
h(8
)k−
h(4
)k
00
00
00
00
0−
10
−1
00
σ(9
),6
k=
h(9
)k
00
00
00
00
02
00
00
σ(1
0),
6k+
1=
h(1
0)
k+
10
00
00
00
00
00
00
0
σ(1
1),
6k+
1=
h(1
1)
k+
1+
h(1
0)
k+
10
00
00
00
00
00
00
0
σ(1
2),
6k+
1=
2h(1
2)
k+
1−
3h(1
0)
k+
10
00
00
00
00
00
00
0
σ(1
3),
6k+
1=
h(1
3)
k+
1+
h(1
2)
k+
1−
h(1
0)
k+
10
00
00
00
00
00
00
0
σ(1
4),
6n
=h
n0
00
00
00
00
00
00
0
Figura 2.11: ∆6

57
σ(1
),7
0σ
(2),
7k−
1σ
(3),
7k−
1σ
(4),
7k
σ(5
),7
kσ
(6),
7k
σ(7
),7
kσ
(8),
7k
σ(9
),7
kσ
(10),
7k+
1σ
(11),
7k+
1σ
(12),
7k+
1σ
(13),
7k+
1σ
(14),
7n
σ(1
),7
0=
h0
00
00
00
00
00
00
00
σ(2
),7
k−
1=
h(2
)k−
10
00
20
10
0−
10
00
00
σ(3
),7
k−
1=
h(3
)k−
10
00
20
00
00
00
00
0
σ(4
),7
k=
h(4
)k
00
00
00
00
00
0−
50
0
σ(5
),7
k=
2h(5
)k−
3h(4
)k
00
00
00
00
00
−2
53
0
σ(6
),7
k=
h(6
)k−
h(5
)k
+h
(4)
k0
00
00
00
00
20
00
0
σ(7
),7
k=
h(7
)k−
h(6
)k
+h
(5)
k−
h(4
)k
00
00
00
00
03
5−
130
0
σ(8
),7
k=
h(8
)k
+2h
(6)
k−
2h(5
)k
+h
(4)
k0
00
00
00
00
−1
0−
10
0
σ(9
),7
k=
h(9
)k−
h(5
)k
+h
(4)
k0
00
00
00
00
20
00
0
σ(1
0),
7k+
1=
h(1
0)
k+
10
00
00
00
00
00
00
0
σ(1
1),
7k+
1=
h(1
1)
k+
1+
h(1
0)
k+
10
00
00
00
00
00
00
0
σ(1
2),
7k+
1=
2h(1
2)
k+
1−
3h(1
0)
k+
10
00
00
00
00
00
00
0
σ(1
3),
7k+
1=
5h(1
3)
k+
1+
5h(1
2)
k+
1+
h(1
1)
k+
1−
4h(1
0)
k+
10
00
00
00
00
00
00
0
σ(1
4),
7n
=h
n0
00
00
00
00
00
00
0
Figura 2.12: ∆7

58
σ(1
),8
0σ
(2),
8k−
1σ
(3),
8k−
1σ
(4),
8k
σ(5
),8
kσ
(6),
8k
σ(7
),8
kσ
(8),
8k
σ(9
),8
kσ
(10),
8k+
1σ
(11),
8k+
1σ
(12),
8k+
1σ
(13),
8k+
1σ
(14),
8n
σ(1
),8
0=
h0
00
00
00
00
00
00
00
σ(2
),8
k−
1=
h(2
)k−
10
00
20
10
00
00
00
0
σ(3
),8
k−
1=
h(3
)k−
10
00
20
00
00
00
00
0
σ(4
),8
k=
h(4
)k
00
00
00
00
00
0−
50
0
σ(5
),8
k=
2h(5
)k−
3h(4
)k
00
00
00
00
00
−2
53
0
σ(6
),8
k=
h(6
)k−
h(5
)k
+h
(4)
k0
00
00
00
00
00
00
0
σ(7
),8
k=
h(7
)k−
h(6
)k
+h
(5)
k−
h(4
)k
00
00
00
00
03
5−
130
0
σ(8
),8
k=
h(8
)k
+2h
(6)
k−
2h(5
)k
+h
(4)
k0
00
00
00
00
−1
0−
10
0
σ(9
),8
k=
h(9
)k
+h
(6)
k−
2h(5
)k
+2h
(4)
k0
00
00
00
00
20
00
0
σ(1
0),
8k+
1=
h(1
0)
k+
10
00
00
00
00
00
00
0
σ(1
1),
8k+
1=
h(1
1)
k+
1+
h(1
0)
k+
10
00
00
00
00
00
00
0
σ(1
2),
8k+
1=
2h(1
2)
k+
1−
3h(1
0)
k+
10
00
00
00
00
00
00
0
σ(1
3),
8k+
1=
5h(1
3)
k+
1+
5h(1
2)
k+
1+
h(1
1)
k+
1−
4h(1
0)
k+
10
00
00
00
00
00
00
0
Figura 2.13: ∆8

59
2.3 Propriedades de ∆r
As proposições nesta seção descrevem propriedades básicas das matrizes ∆r produzidas pelo
método da varredura. Estas serão usadas nas demonstrações dos resultados principais. Mais
especi�camente, nossa atenção estará voltada para a caracterização de propriedades asso-
ciadas aos pivôs primários e pivôs mudança de base, que por sua vez são essenciais na
determinação da seqüência espectral.
É fácil ver que cada matriz ∆r é triangular superior e tem quadrado zero, já que é
recursivamente obtida de uma matriz de conexão inicial ∆ por mudanças de base sobre Q.
Observe que se ∆rki,j
é um pivô primário, então não existem combinações lineares de
colunas à esquerda da j-ésima coluna que, adicionadas à um múltiplo da j-ésima coluna
zerariam esta entrada mantendo todas as entradas ∆rks,j
iguais a zero para s > i. De fato,
existem três tipos de colunas hk à esquerda da j-ésima coluna. Ou o pivô primário está
acima da i-ésima linha, ou abaixo, ou a coluna não tem um pivô primário em ∆r. No último
caso, a coluna tem todas as entradas abaixo da r-ésima diagonal iguais a zero. Este também
é o caso quando o pivô primário está acima da i-ésima linha já que todas as entradas abaixo
do pivô primário são iguais a zero. Assim, esses três tipos de colunas não podem contribuir
em uma combinação linear que tem por objetivo zerar a entrada ∆rki,j
.
Para simpli�car a notação, quando não for necessário, a referência ao índice k na matriz
∆rk será omitida.
Proposição 2.3.1. Se a entrada ∆rp−r+1,p+1 é identi�cada pelo método da varredura como
um pivô primário ou um pivô mudança de base então ∆rs,p+1 = 0 para todo s > p− r + 1.
Demonstração: Pelo método da varredura ∆rs,p+1 não pode ser um pivô primário
para todo s > p−r+1. Como entradas não nulas abaixo da r-ésima diagonal de ∆r que não
são pivô primário somente ocorrem em colunas acima de um pivô primário então ∆rs,p+1 = 0
para todo s > p− r + 1.
A Proposição 2.3.2 a�rma que não podemos ter mais do que um pivô primário em uma
linha ou coluna �xada. Além disso, se existe um pivô primário em uma linha i então não
existe pivô primário na coluna i.

60
Proposição 2.3.2. Seja {∆r} a família de matrizes produzidas pelo método da varredura
aplicado a uma matriz de conexão ∆. Dados quaisquer dois pivôs primários ∆rki,j
e ∆rkm,`
temos que {i, j} ∩ {m, `} = ∅.
Demonstração: O único caso não trivial que precisa ser considerado é quando k =
k + 1 e, neste caso, temos que mostrar que j 6= m. Suponha que existe um pivô primário
na j-ésima coluna e outro na j-ésima linha de ∆r, isto é, ∆rki,j
e ∆rk+1j,`
são pivôs primários.
Então ∆rks,j
= 0 para todo s > i e ∆rk+1s,`
= 0 para todo s > j.
Sejam σ(j),rk , σ(i),r
k−1 e σ(`),rk+1 cadeias associadas à j-ésima, à i-ésima e à `-ésima colunas de
∆r respectivamente.
Como ∆r tem quadrado zero, V1 = {σ(i),rk−1 , σ
(j),rk , σ
(`),rk+1 } não pode ser uma intervalo já que
∆r(V1)2 6= 0. Portanto, deve existir um σ
(j2),rk associado à j2-ésima coluna de ∆r tal que
σ(j2),rk 6= σ
(j),rk , ∆r
ki,j26= 0 e ∆r
k+1j2,`6= 0. Notemos que j2 < j, pois σ(j2),r
k 6= σ(j),rk e todas as
entradas abaixo de um pivô primário são iguais a zero.
A entrada ∆rki,j2
não pode ser um pivô primário, pois a i-ésima linha já tem um pivô
primário. Portanto, o pivô primário da j2-ésima coluna deve estar abaixo da entrada ∆rki,j2
,
ou seja, existe um σ(i2),rk−1 associado à i2-ésima linha de ∆r, com i2 > i, tal que ∆r
ki2,j2é um
pivô primário. Segue que ∆rks,j2
= 0 para todo s > i2. Veja a Figura 2.14.
Analogamente, V2 = {σ(i2),rk−1 , σ
(j2),rk , σ
(`),rk+1 } não pode ser um intervalo já que ∆r tem
quadrado zero e ∆r(V2)2 6= 0. Portanto, existe σ(j3),r
k na j3-ésima coluna de ∆r tal que
σ(j3),rk 6= σ
(j2),rk , j3 ≤ j, ∆r
ki2,j36= 0 e ∆r
k+1j3,`6= 0.
Mostremos que σ(j3),rk 6= σ
(j),rk . Pela construção de σ(j3),r
k temos que ∆rki2,j3
6= 0 com
i2 > i. Portanto, se j3 fosse igual a j então teríamos uma entrada ∆rki2,j
6= 0 abaixo do pivô
primário ∆rki,j
. Mas isso contradiz o fato que ∆rks,j
= 0 para todo s > i.
Repetindo os passos acima e sempre usando o fato que ∆r tem quadrado zero, eventual-
mente se esgotarão as linhas ou as colunas para continuar os argumentos acima. Veja Figura
2.15. Se as hk colunas se esgotarem, então teremos um intervalo V com ∆(V )2 6= 0, o que
contradiz o fato de ∆r ter quadrado zero. Por outro lado, se não existem mais hk−1 linhas
então teremos uma entrada não nula em ∆r abaixo da r-ésima diagonal auxiliar que não

61
σ(i),rk−1 σ
(i2),rk−1 σ
(j2),rk σ
(j),rk σ
(`),rk+1
σ(i),rk−1 ∆r
ki,j2∆r
ki,j
σ(i2),rk−1 ∆r
ki2,j2
σ(j2),rk ∆r
k+1j2,`
σ(j),rk ∆r
k+1j,`
σ(`),rk+1
Figura 2.14: Impossibilidade de pivôs primários na j-ésima linha e na j-ésima coluna simul-
taneamente.
σ(`),rk+1
σ(j),rk
σ(i),rk−1
σ(j2),rk
σ(i2),rk−1
σ(j3),rk
σ(i3),rk−1
Figura 2.15: Construção de uma seqüência �nita de singularidades para garantir que não
existem intervalos ∆r(V ) em ∆r com ∆r(V )2 = 0.

62
é um pivô primário e nem uma entrada acima de um pivô primário. Isto contradiz o fato
de que as únicas entradas não nulas em ∆r abaixo da r-ésima diagonal auxiliar são pivôs
primários ou entradas acima de pivôs primários.

Capítulo 3
Os Módulos Erp da Seqüência Espectral
Nesta seção, mostramos como os Z-módulos Erp são determinados quando aplicamos o mé-
todo da varredura à matriz ∆. Os pivôs primários e pivôs mudança de base de ∆r produzidos
pelo método da varredura têm um papel importante no processo de determinar os geradores
de Zrp , daí a necessidade de mostrar que os pivôs são sempre inteiros.
Lembre que
Erp = Zr
p/(Zr−1p−1 + ∂Zr−1
p+r−1)
onde
Zrp = {c ∈ FpC | ∂c ∈ Fp−rC}
Cada hk coluna da matriz de conexão ∆ representa conexões de uma cadeia elementar
hk de Ck a uma cadeia elementar hk−1 de Ck−1.
O Z-módulo Zrp,k−p = {c ∈ FpCk; ∂c ∈ Fp−rCk−1} é gerado por k-cadeias contidas em
FpCk com bordos em Fp−rCk−1. Isto corresponde na matriz ∆ a todas as hk colunas à
esquerda da (p+ 1)-ésima coluna 1 ou combinações lineares destas hk colunas, tais que seus
bordos (entradas não nulas) estão acima da (p− r + 1)-ésima linha.
Analogamente Zr−1p−1,k−(p−1) = {c ∈ Fp−1Ck; ∂c ∈ Fp−rCk−1} corresponde na matriz ∆ a
1As expressões "acima da linha" e "à esquerda da coluna" pressupõem a inclusão da linha e da coluna
em questão enquanto que as expressões "abaixo da linha" e "à direita da coluna" não incluem da linha e
a coluna em questão
63

64
todas as hk colunas à esquerda da p-ésima coluna ou combinações lineares destas hk colunas
cujos bordos estão acima da (p− r + 1)-ésima linha.
Finalmente,
∂Zr−1p+r−1,(k+1)−(p+r−1) = ∂{c ∈ Fp+r−1Ck+1; ∂c ∈ FpCk}
é o conjunto de todos os bordos de elementos em Zr−1p+r−1,(k+1)−(p+r−1), o que corresponde
na matriz de conexão ∆ a todas as hk colunas à esquerda da (p + 1)-ésima coluna (ou
equivalentemente todas as hk-linhas acima da (p + 1)-ésima linha) que são bordos de hk+1
colunas que estão à esquerda da (p+ r)-ésima coluna.
A singularidade de índice k em FpCk \ Fp−1Ck corresponde a uma k cadeia associadas à
(p+ 1)-ésima coluna de ∆. Denotamos tal singularidade por h(p+1)k .
A Proposição 3.0.3 estabelece uma fórmula para Zrp,k−p.
Proposição 3.0.3. Zrp,k−p = Z[µ(p+1),rσ
(p+1),rk , µ(p),r−1σ
(p),r−1k , . . . , µ(κ),r−p−1+κσ
(κ),r−p−1+κk ]
onde κ é a primeira coluna de ∆ associada a uma k-cadeia e µ(j),ζ = 0 quando o pivô
primário da j-ésima coluna está abaixo da (p−r+1)-ésima linha e µ(j),ζ = 1 caso contrário.
Demonstração: É fácil veri�car que as cadeias correspondentes a colunas cujos pivôs
primários estão abaixo da (p − r + 1)-ésima linha não representam geradores de Zrp,k−p.
Consideremos então a k-cadeia σ(p+1−ξ),r−ξk , com ξ ∈ {0, . . . , p+1−κ}, associada à (p+1−ξ)-
ésima coluna de ∆r−ξ tal que o pivô primário da (p+1− ξ)-ésima coluna de ∆r−ξ não esteja
abaixo (p − r + 1)-ésima linha. Mostremos primeiramente que σ(p+1−ξ),r−ξk é uma k-cadeia
que corresponde a um gerador de Zrp . É claro que σ(p+1−ξ),r−ξ
k está na �ltração FpCk para
ξ ≥ 0. Além disso, o método varredura na (r − ξ)-ésima diagonal auxiliar zerou todos os
pivôs mudança de base abaixo da (r − ξ)-ésima diagonal, ou seja, as entradas não nulas da
coluna (p + 1 − ξ) de ∆r−ξ não estão abaixo da (p + 1 − ξ) − (r − ξ) = (p − r + 1)-ésima
linha. Portanto, o bordo de σ(p+1−ξ),r−ξk está em Fp−rCk−1.
Mostremos agora que qualquer elemento em Zrp,k−p é uma combinação linear inteira dos
σ(p+1−ξ),r−ξk , ξ = 0, . . . , p+ 1− κ tal que o inteiro múltiplo de σ(p+1−ξ),r−ξ
k é diferente de zero
quando o pivô primário da (p + 1 − ξ)-ésima coluna não está abaixo da (p − r + 1)-ésima
linha. Mostremos por indução em p e r.

65
• Seja p = κ − 1, onde κ é a primeira coluna de ∆ associada a uma k-cadeia e r = ξ1,
onde ξ1 é a primeira diagonal auxiliar em ∆ com entradas não nulas em ∆k.
Temos que Zrp = Zξ1
κ−1 é gerado por k-cadeias contidas em Fκ−1Ck cujos bordos estão
em Fκ−1−ξ1Ck−1. Isto corresponde na matriz ∆ a todas as hk colunas à esquerda da κ-
ésima coluna ou combinações lineares destas hk colunas, tais que seus bordos (entradas
não nulas) estão acima da (κ − ξ1)-ésima linha. Como κ é a primeira coluna em ∆
associada a uma k-cadeia e ξ1 é a primeira diagonal auxiliar em ∆ com entradas não
nulas em ∆k então o gerador de Zξ1κ−1 corresponde à k-cadeia elementar h(κ)
k . Por outro
lado, σ(κ),ξ1k é a k-cadeia associada à κ-ésima coluna de ∆ξ1 . Como não há mudanças
de base em ∆k para construir ∆ξ1k então σ(κ),ξ1
k = h(κ)k .
• Suponhamos que os geradores de Zr−1p−1 correspondam as k-cadeias σ(p+1−ξ),r−ξ
k , ξ =
1, . . . , p + 1 − κ tais que o pivô primário da (p + 1 − ξ)-ésima coluna está acima da
(p − r + 1)-ésima linha. Se o pivô primário da (p + 1)-ésima coluna está abaixo da
(p−r+1)-ésima linha então Zrp = Zr−1
p−1 e este é o caso em que µ(p+1),r = 0. Suponhamos
agora que o pivô primário da (p + 1)-ésima coluna está acima da (p − r + 1)-ésima
linha. Seja hk = bp+1h(p+1)k +· · ·+bκh(κ)
k uma k-cadeia correspondente a um elemento de
Zrp,k−p. Sabemos que hk está em FpCk e seu bordo está acima da (p−r+1)-ésima linha.
Se bp+1 = 0 então hk ∈ Zr−1p−1 e o resultado segue da hipótese de indução. Suponhamos
então que bp+1 6= 0.
Pelo método da varredura, σ(p+1),rk tem cp+1,r
p+1 como coe�ciente líder minimal. Mostre-
mos que, como cp+1,rp+1 é minimal então bp+1 = α1c
p+1,rp+1 , α1 ∈ Z. Suponhamos que bp+1
não é um inteiro múltiplo de cp+1,rp+1 . Seja υ > 0 um inteiro de forma que υcp+1,r
p+1 é o maior
múltiplo de cp+1,rp+1 tal que υcp+1,r
p+1 < bp+1. Assim temos υcp+1,rp+1 < bp+1 < (υ + 1)cp+1,r
p+1 ,
ou seja, 0 < bp+1 − υcp+1,rp+1 < cp+1,r
p+1 . Segue que a k-cadeia hk − υσ(p+1),rk tem coe�ci-
ente líder bp+1 − υcp+1,rp+1 < cp+1,r
p+1 , o que contradiz o fato de cp+1,rp+1 ser coe�ciente líder
minimal. Portanto bp+1 = α1cp+1,rp+1 , α1 ∈ Z.

66
Dessa forma podemos reescrever hk como
hk = α1σ(p+1),rk + (bp − α1c
p+1,rp )h
(p)k + · · ·+ (bκ − α1c
p+1,rκ )h
(κ)k
Notemos que hk−α1σ(p+1),rk = (bp−α1c
p+1,rp )h
(p)k +· · ·+(bκ−α1c
p+1,rκ )h
(κ)k ∈ Fp−1. Além
disso, como hk e σ(p+1),rk têm seus bordos acima da (p−r+1)-ésima linha então o bordo
de hk − α1σ(p+1),rk está acima da (p − r + 1)-ésima linha. Portanto, hk − α1σ
(p+1),rk ∈
Zr−1p−1 . Por hipótese de indução temos que hk − α1σ
(p+1),rk = α2µ
(p),r−1σ(p),r−1k + · · · +
ακµ(κ),r−p−1+κσ
(κ),r−p−1+κk ou seja,
hk = α1σ(p+1),rk + α2µ
(p),r−1σ(p),r−1k + · · ·+ ακµ
(κ),r−p−1+κσ(κ),r−p−1+κk
Notemos que as matrizes ∆r podem ter algumas entradas que não são números inteiros.
No entanto, a Proposição 3.0.4 mostra que todos os pivôs na r-ésima diagonal de ∆r são
sempre números inteiros.
Proposição 3.0.4. Suponha que ∆rp−r+1,p+1 é um pivô primário ou um pivô mudança de
base. Então ∆rp−r+1,p+1 é um inteiro.
Demonstração: Como ∆rp−r+1,p+1 é um pivô primário ou um pivô mudança de base
então ∆rs,p+1 = 0 para todo s > p− r + 1. Portanto, σ(p+1),r
k ∈ Zrp e
∂σ(p+1),rk = ∆r
p−r+1,p+1σ(p−r+1),rk−1 + · · ·+ ∆r
κ∗,p+1σ(κ∗),rk−1
onde κ∗ é a primeira coluna associada a uma (k − 1)-cadeia. Segue que
∂σ(p+1),rk ∈ ∂Zr
p ⊂ Zr+1p−r = Z[µ(p−r+1),r+1σ
(p−r+1),r+1k , µ(p−r),rσ
(p−r),rk , . . . , µ(κ),2r−p+κσ
(κ),2r−p+κk ]
Portanto, o coe�ciente ∆rp−r+1,p+1c
p−r+1,rp−r+1 de h(p−r+1)
k−1 em ∂σ(p+1),r tem que ser um múltiplo
α do coe�ciente cp−r+1,r+1p−r+1 de h(p−r+1)
k−1 ∈ Zr+1p−r , ou seja,
∆rp−r+1,p+1c
p−r+1,rp−r+1 = αcp−r+1,r+1
p−r+1

67
onde α ∈ Z \ {0}. Assim temos
∆rp−r+1,p+1 =
αcp−r+1,r+1p−r+1
cp−r+1,rp−r+1
Segue de (2.6) que ∆rp−r+1,p+1 é um inteiro.
O próximo Lema será usado no Teorema 3.0.6. Este Lema detecta o aparecimento de
torção na seqüência espectral.
Lema 3.0.5. Suponha que ∂Zr−1p+r−1,(k+1)−(p+r−1) * Zr−1
p−1,k−(p−1). Então
Zr−1p−1,k−(p−1) + ∂Zr−1
p+r−1,(k+1)−(p+r−1) = Z[`σ(p+1),rk , µ(p),r−1σ
(p),r−1k , . . . , µ(κ),r−p−1+κσ
(κ),r−p−1+κk ]
onde ` = mdc{µ(r+p),r−1cp+1,r−1p+1 ∆r−1
p+1,r+p, . . . , µ(κ),κ−p−1cp+1,κ−p−1
p+1 ∆κ−p−1p+1,κ }/c
p+1,rp+1 , κ é a pri-
meira coluna associada a uma k-cadeia e κ é a primeira coluna associada a uma (k + 1)-
cadeia.
Demonstração: Como estamos supondo que ∂Zr−1p+r−1,(k+1)−(p+r−1) * Zr−1
p−1,k−(p−1) en-
tão Zr−1p−1,k−(p−1) + ∂Zr−1
p+r−1,(k+1)−(p+r−1) é um subconjunto de
Zrp,k−p = Z[µ(p+1),rσ
(p+1),rk , µ(p),r−1σ
(p),r−1k , . . . , µ(κ),r−p−1+κσ
(κ),r−p−1+κk ]
mas por outro lado não é um subconjunto de
Zr−1p−1,k−(p−1) = Z[µ(p),r−1σ
(p),r−1k , µ(p−1),r−2σ
(p−1),r−2k , . . . , µ(κ),r−p−1+κσ
(κ),r−p−1+κk ]
Então µ(p+1),r = 1 e Zr−1p−1 +∂Zr−1
p+r−1,(k+1)−(p+r−1) contem um múltiplo inteiro ` de σ(p+1),rk ,
ou seja, Zr−1p−1 + ∂Zr−1
p+r−1,(k+1)−(p+r−1) é igual a
Z[`σ(p+1),rk , µ(p),r−1σ
(p),r−1k , µ(p−1),r−2σ
(p−1),r−2k , . . . , µ(κ),r−p−1+κσ
(κ),r−p−1+κk ]
Vamos agora determinar o inteiro `. Temos que
Zr−1p+r−1,(k+1)−(p+r−1) = Z[µ(p+r),r−1σ
(p+r),r−1k+1 , . . . , µ(κ),κ−p−1σ
(κ),κ−p−1k+1 ]

68
Logo,
∂Zr−1p+r−1,(k+1)−(p+r−1)=Z[µ(p+r),r−1∂σ
(p+r),r−1k+1 , µ(p+r−1),r−2∂σ
(p+r−1),r−2k+1 , . . . , µ(κ),κ−p−1∂σ
(κ),κ−p−1k+1 ]
(3.1)
onde µ(p+1−ξ),r−1−ξ = 0 quando o pivô primário da (p + 1− ξ)-ésima coluna está abaixo da
(p + 1)-ésima linha. Para ξ = 0, . . . , p + r − κ com µ(p+1−ξ),r−1−ξ = 1 temos ∆r−1−ξs,p+r−ξ = 0
para todo s > i e portanto,
∂σ(p+r−ξ),r−1−ξk+1 = ∆r−1−ξ
p+1,p+r−ξσ(p+1),r−1−ξk + · · ·+ ∆r−1−ξ
κ,p+r−ξσ(κ),r−1−ξk
já que os bordos ∂σ(p+r−ξ),r−1−ξk+1 com ∆r−1−ξ
i,p+r−ξ 6= 0 para algum i > p + 1 correspondem
exatamente às linhas que têm pivôs primários abaixo (p+ 1)-ésima linha e neste caso temos
µ(p+r−ξ),r−1−ξ = 0.
Assim, para ξ = 0, . . . , p+ r − κ, quando µ(p+r−ξ),r−1−ξ = 1 temos
Zr−1p−1 + [∂σ
(p+r−ξ),r−1−ξk+1 ] = Zr−1
p−1 + [∆r−1−ξp+1,p+r−ξσ
(p+1),r−1−ξk + · · ·+ ∆r−1−ξ
κ,p+r−ξσ(κ),r−1−ξk ] (3.2)
Por outro lado, Zr−1p−1 + [∂σ
(p+r−ξ),r−1−ξk+1 ] ⊂ Zr−1
p−1 + ∂Zr−1p+r−1,(k+1)−(p+r−1) implica que
Zr−1p−1 + [∂σ
(p+r−ξ),r−1−ξk+1 ]=[`ξσ
(p+1),rk , µ(p),r−1σ
(p),r−1k , . . . , µ(κ),r−p−1+κσ
(κ),r−p−1+κk ] (3.3)
O coe�ciente de h(p+1)k no conjunto de geradores do Z-módulo em (3.2) é ∆r−1−ξ
p+1,p+r−ξcp+1,r−1−ξp+1 .
Por outro lado, o coe�ciente de h(p+1)k no conjunto de geradores do Z-módulo em (3.3) é
`ξcp+1,rp+1 . Segue que `ξ = ∆r−1−ξ
p+1,p+r−ξcp+1,r−1−ξp+1 /cp+1,r
p+1 .
Portanto, temos que ` = mdc{µ(p+r−ξ),r−1−ξ`ξ} onde ξ = 0, . . . , p+ r − κ, ou seja,
` = mdc{µ(r+p),r−1cp+1,r−1p+1 ∆r−1
p+1,r+p, . . . , µ(κ),κ−p−1cp+1,κ−p−1
p+1 ∆κ−p−1p+1,κ }/c
p+1,rp+1
Teorema 3.0.6. A matriz ∆r obtida no método da varredura aplicado a ∆ determina Erp.
Demonstração: Mostremos que
Erp,k−p =
Zrp,k−p
Zr−1p−1,k−(p−1) + ∂Zr−1
p+r−1,(k+1)−(p+r−1)

69
é zero ou um módulo �nitamente gerado cujo gerador corresponde a uma k-cadeia associada
à (p+ 1)-ésima coluna de ∆r.
Notemos que ∆rp−r+1,p+1 está na r-ésima diagonal e tem um papel crucial no processo
de determinar Erp,k−p. Vamos então identi�car o efeito que as entradas na r-ésima diagonal
auxiliar e ∆r têm em determinar os geradores dos Z-módulos Erp .
Uma entrada não nula na r-ésima diagonal auxiliar pode ser um pivô primário, um pivô
mudança de base ou estar em uma coluna acima de um pivô primário. Uma entrada nula
pode estar numa coluna acima de um pivô primário ou todas as entradas abaixo da mesma
são também iguais a zero.
1. Suponha que a entrada ∆rp−r+1,p+1 tenha sido identi�cada pelo método varredura como
um pivô primário. Segue da Proposição 2.3.1 que ∆rs,p+1 = 0 para todo s > p− r + 1.
Portanto, a cadeia associada à (p+ 1)-ésima coluna em ∆r corresponde a um gerador
de Zrp,k−p. Esta cadeia é uma combinação linear sobre Q de cadeias associadas às hk
colunas de ∆r−1 à esquerda da (p + 1)-ésima coluna tal que o coe�ciente da (p + 1)-
ésima hk coluna é um inteiro não nulo. Pelo método da varredura esta cadeia também
é uma combinação linear sobre Z das hk colunas de ∆ à esquerda da (p + 1)-ésima
coluna. Esta cadeia é σ(p+1),rk e, como o coe�ciente de h(p+1)
k é um inteiro não nulo,
σ(p+1),rk não está contido nos geradores de Zr−1
p−1,k−(p−1).
A�rmação 1: Se ∆rp−r+1,p+1 foi identi�cado pelo método da varredura como um
pivô primário, então ∂Zr−1p+r−1,(k+1)−(p+r−1) ⊆ Zr−1
p−1,k−(p−1).
Os geradores de Zr−1p+r−1,(k+1)−(p+r−1) devem corresponder às (k + 1)-cadeias asso-
ciadas às hk+1 colunas com a propriedade que seus bordos estão acima da (p+1)-
ésima linha e conseqüentemente todas as entradas abaixo da (p + 1)-ésima linha
são iguais a zero. Portanto, as entradas destas hk+1 colunas na (p+1)-ésima linha
devem, pelo método da varredura, ser um pivô primário ou uma entrada nula.
Veja a Figura 3.1.
Segue da Proposição 2.3.2 que a (p + 1)-ésima linha não pode conter um pivô
primário, já que assumimos que a (p + 1)-ésima coluna tem um pivô primário.

70
σ(p−
r+
1),
rk−
1σ
(p+
1),
rk
σ(p
+r−
2),
rk+
1σ
(p+
r−
1),
rk+
1σ
(p+
r),
rk+
1σ
(p+
r+
1),
rk+
1
σ(p−
r+
1),
rk−
1∆
r p−
r+
1,p
+1
0
. . .. . .
. . .. . .
. . .
0∗
∗∗
σ(p
+1),
rk
00
∗∆
r p+
1,p
+r+
1
00
∗0
σ(p
+r−
2),
rk+
1
σ(p
+r−
1),
rk+
1
σ(p
+r),
rk+
1
σ(p
+r+
1),
rk+
1
r
r−
1
Figura 3.1: ∂Zr−1p+r−1,(k+1)−(p+r−1) ⊆ Zr−1
p−1,k−(p−1)

71
Portanto, as entradas destas hk+1 colunas na (p+1)-ésima linha devem ser nulas.
Dessa forma ∂Zr−1p+r−1,(k+1)−(p+r−1) não contém em seu conjunto de geradores um
múltiplo do gerador σ(p+1),rk . A a�rmação segue.
Pela Proposição 3.0.3 temos que Erp,k−p = Z[σ
(p+1),rk ].
2. Se a entrada ∆rp−r+1,p+1 foi identi�cada pelo método da varredura como um pivô mu-
dança de base então o método garante que ∆r+1p−r+1,p+1 = 0. Além disso, ∆r
s,p+1 = 0
para todo s > p− r + 1 pela Proposição 2.3.1.
Portanto, assim como no caso anterior, o gerador correspondente à k-cadeia associada
à (p+ 1)-ésima coluna σ(p+1),rk de ∆r é um gerador de Zr
p,k−p.
Portanto, temos que analisar a (p+ 1)-ésima linha. Veja 3.2.
σ(p−r+1),rk−1 σ
(p+1),rk σ
(p+r−2),rk+1 σ
(p+r−1),rk+1 σ
(p+r),rk+1 σ
(p+r+1),rk+1
σ(p−r+1),rk−1 ∆r
p−r+1,p+1
0
......
......
...
∗ ∗ ∗ ∗
σ(p+1),rk ∆r
p+1,p+r−2 0 ∗ ∆rp+1,p+r+1
0 0 ∗ 0
σ(p+r−2),rk+1
σ(p+r−1),rk+1
σ(p+r),rk+1
σ(p+r+1),rk+1
r
r−1
Figura 3.2: ∂Zr−1p+r−1,(k+1)−(p+r−1) * Zr−1
p−1,k−(p−1)
Existem duas possibilidades:

72
(a) ∂Zr−1p+r−1,(k+1)−(p+r−1) ⊆ Zr−1
p−1,k−(p−1), ou seja, todos os bordos de elementos em
Zr−1p+r−1,(k+1)−(p+r−1) estão acima da p-ésima linha.
Neste caso, assim como antes, pela Proposição 3.0.3 Erp,k−p = Z[σ
(p+1),rk ].
(b) ∂Zr−1p+r−1,(k+1)−(p+r−1) * Zr−1
p−1,k−(p−1), ou seja, existem elementos que estão em
Zr−1p+r−1,(k+1)−(p+r−1) cujo bordo tem uma entrada não nula na (p+ 1)-ésima linha.
Esta, por sua vez, é necessariamente um pivô primário.
Pelo Lema 3.0.5 Erp,k−p =
Z`Z
[σ(p+1),rk ].
3. Se a entrada ∆rp−r+1,p+1 é não nula, mas não é um pivô primário nem um pivô mudança
de base então deve ser uma entrada acima de um pivô primário. Em outras palavras,
existe s > p− r+ 1 tal que ∆rs,p+1 é um pivô primário. Segue que σ(p+1),r
k não está em
Zrp,k−p. Logo Z
r−1p−1,k−(p−1) = Zr
p,k−p e, portanto, Erp,k−p = 0.
4. Se a entrada ∆rp−r+1,p+1 é uma entrada nula então temos as seguintes possibilidades:
(a) Existe um pivô primário abaixo de ∆rp−r+1,p+1, ou seja, existe s > p−r+1 tal que
∆rs,p+1 é um pivô primário. Neste caso o gerador correspondente correspondente
à k-cadeia associada à (p + 1)-ésima coluna σ(p+1),rk não é um gerador de Zr
p e,
portanto, Zr−1p−1,k−(p−1) = Zr
p,k−p. Segue que Erp,k−p = 0.
(b) ∆rs,p+1 = 0 para todo s > p−r+1. Neste caso, o gerador correspondente à k-cadeia
associada à (p+1)-ésima coluna σ(p+1),rk em ∆r é um gerador de Zr
p,k−p. Portanto,
devemos analisar a (p+ 1)-ésima linha. Temos as seguintes possibilidades:
i. ∂Zr−1p+r−1,(k+1)−(p+r−1) ⊆ Zr−1
p−1,k−(p−1), ou seja, todos os bordos de elementos
em Zr−1p+r−1,(k+1)−(p+r−1) estão associados a colunas cujas entradas não nulas
estão acima da p-ésima linha.
Neste caso, assim como antes, pela Proposição 3.0.3 Erp,k−p = Z[σ
(p+1),rk ].
ii. ∂Zr−1p+r−1,(k+1)−(p+r−1) * Zr−1
p−1,k−(p−1), ou seja, Zr−1p+r−1,(k+1)−(p+r−1) contém ele-
mentos cujo bordo está associado a uma coluna que tem uma entrada não
nula na (p+1)-ésima linha. Pela Proposição 3.0.3 e pelo Lema 3.0.5 Erp,k−p =
Z`Z
[σ(p+1),rk ], ` ∈ Z.

73
5. A entrada ∆rp−r+1,p+1 não está em ∆r
k. Isto inclui o caso em que p− r+1 < 0, ou seja,
∆rp−r+1,p+1 não está na matriz ∆r.
A análise de Erp é muito semelhante ao caso anterior, ou seja, existem duas possibili-
dades:
(a) Existe um pivô primário na (p+1)-ésima coluna em uma diagonal auxiliar r < r.
Neste caso o gerador correspondente à k-cadeia associada à (p+ 1)-ésima coluna
σ(p+1),rk não é um gerador de Zr
p,k−p. Portanto Zr−1p−1,k−(p−1) = Zr
p,k−p e Erp,k−p = 0.
(b) Todas as entradas em ∆r na (p+1)-ésima coluna em diagonais auxiliares menores
que r são nulas, ou seja, o gerador correspondente à k-cadeia associada à (p+ 1)-
ésima coluna σ(p+1),rk em ∆r é um gerador de Zr
p,k−p. Então temos que analisar a
(p+ 1)-ésima linha.
i. Se ∂Zr−1p+r−1,(k+1)−(p+r−1) ⊆ Zr−1
p−1,k−(p−1) então, pela Proposição 3.0.3, Erp,k−p =
Z[σ(p+1),rk ].
ii. Se ∂Zr−1p+r−1,(k+1)−(p+r−1) * Zr−1
p−1,k−(p−1) então, pelo Lema 3.0.5, Erp,k−p =
Z`Z
[σ(p+1),rk ].
O Teorema 3.0.6 mostra a seqüência de matrizes produzida pelo método da varredura
determina os geradores dos espaços Erp . A demonstração deste teorema mostra como isto
acontece. As k-cadeias associadas as colunas de ∆rk à esquerda da p-ésima coluna geram o
Z-módulo Zrp .
3.0.1 Filtrações mais grossas
O primeiro passo para a generalização dos nossos resultados para uma decomposição de
Morse é considerar que cada conjunto de MorseMp da decomposição não contem apenas uma
singularidade, mas uma união �nita de singularidades e as órbitas conectando as mesmas.
Inicialmente, consideramos uma �ltração mais grossa F no complexo de Morse (Z〈critf〉,∆)
associado a uma função de Morse f e uma �ltração F . Isto propõe um modelo de uma

74
F0 . . . Fm0 Fm0 + 1 . . . Fm1 Fm1 + 1 . . . Fm2 Fm2 + 1 . . . Fm
F0
...
Fm0
Fm0 + 1
...
Fm1
Fm1 + 1
...
Fm2
Fm2 + 1
...
Fm
F1
F0
F2
F3
F0
F1
F2
F3
R1
R2
R3
︷ ︸︸ ︷︷ ︸︸ ︷︷ ︸︸ ︷︷ ︸︸ ︷
∆U0,U1 ∆U0,U2 ∆U0,U3
∆U1,U2 ∆U1,U3
∆U2,U3
Figura 3.3: Filtração mais grossa.
decomposição de Morse com �ltração mais �na F e uma matriz de conexão como na Figura
3.3.
Considere a �ltração F dada por F0 = {F0, . . . , Fm1}, F1 = {F0, . . . , Fm1}, F2 =
{F0, . . . , Fm2}, . . . , FM = {F0, . . . , Fm} com m0 < m1 < m2 < . . . < m, onde F =
{F0, F1, . . . , Fm} é tal que só existe uma singularidade h(p)k ∈ Fp \ Fp−1. Veja Figura 3.3.
Assim FP \FP−1 = FmP\FmP−1
. Seja JP = {mP−1 +1, . . . ,mP}. Note que os intervalos
JP ⊂ {1, . . . ,m} são todos disjuntos e seus elementos indexam a �ltração F . Lembrando
que cada Fp está representado na matriz de conexão pelas colunas à esquerda da coluna
p+ 1, temos que levar em conta a translação por 1. Assim, dado um conjunto JP , considere
o conjunto transladado JP = {mP−1 + 2, . . . ,mP + 1}.
Consideremos o complexo C com a �ltração F . Neste caso, para cada P , MP = {h(p)k ∈
FP \ FP−1} = {h(p)k , p ∈ JP} e, portanto, existe uma outra seqüência espectral (ER
P,Q,∆).

75
Temos que FPC \ FP−1C corresponde na matriz de conexão a
∆JP−1,JP= (∆s,`)
s ∈ JP−1
` ∈ JP
Consideremos FP = {F1, . . . , FmP}, FP−1 = {F1, . . . , FmP−1
} e FP−R = {F1, . . . , FmP−R}.
Seja Q tal que P +Q = k.
Podemos supor que existem pontos críticos de índice k em FP \ FP−R. Temos que
ZRP,Q = {c ∈ FPCk | ∂c ∈ FP−RCk−1}
= {c ∈ FmPCk | ∂c ∈ FmP−R
Ck−1}
= ZmP−mP−R
mP ,k−mP
Pela Proposição 3.0.3
ZRP,Q = Z[µ(mP +1),mP−mP−Rσ
(mP +1),mP−mP−R
k , . . . , µ(κ),κ−mP−R−1σ(κ),κ−mP−R−1k ]
onde κ é a primeira coluna de ∆ associada a uma coluna hk. Note que as singularidades não
precisam estar ordenadas em ordem crescente com respeito ao índice. Analogamente,
ZR−1P−1,Q+1 = {c ∈ FP−1Ck | ∂c ∈ FP−RCk−1}
= {c ∈ FmP−1Ck | ∂c ∈ FmP−R
Ck−1}
= ZmP−1−mP−R
mP−1,k−mP−1
Logo,
ZR−1P−1,Q+1 = Z[µ(mP−1+1),mP−1−mP−Rσ
(mP−1+1),mP−1−mP−R
k , . . . , µ(κ),κ−mP−R−1σ(κ),κ−mP−R−1k ]
Finalmente,
ZR−1P+R−1,Q−R+2 = {c ∈ FP+R−1Ck | ∂c ∈ FPCk−1}
= {c ∈ FmP+R−1Ck+1 | ∂c ∈ FmP−R
Ck}
= ZmP+R−1−mP
mP+R−1,k+1−mP+R−1
e, portanto, ZR−1P+R−1,Q−R+2 é dado por
Z[µ(mP+R−1+1),mP+R−1−mP−Rσ(mP+R−1+1),mP+R−1−mP−R
k , . . . , µ(κ),κ−mP−R−1σ(κ),κ−mP−R−1k ]
Dessa forma �cam determinados os espaços ERP,Q da seqüência espectral associada a F .
Provamos então o resultado seguinte.

76
Teorema 3.0.7. Seja ϕ o �uxo gradiente de uma função de Morse f , D(M,<ϕ) = {MP , p =
1, . . . ,M} uma decomposição de Morse de M , (C,∆) onde ∆ é a matriz de conexão de
D(M,<ϕ) e uma �ltração F = {FP}Mi=1 com FP = {F1, . . . , FmP
}, tal que, para cada P ,
MP = {h(p)k , p ∈ JP}. Seja (ER
P,Q, dRP,Q) a seqüência espectral associada a C quando conside-
ramos a �ltração F . Então os geradores dos espaços ERP,Q são determinados pelas matrizes
de conexão ∆r obtidas pelo método da varredura aplicado a ∆.

Capítulo 4
As Diferenciais da Seqüência Espectral
Neste capítulo mostramos como o método da varredura aplicado a ∆ induz as diferenciais
drp : Er
p → Erp−r da seqüência espectral. Quando Er
p e Erp−r são ambos não nulos, a entrada
∆rp−r+1,p+1 em ∆r é um pivô primário, um pivô mudança de base ou um zero com uma
coluna de entradas nulas abaixo. Neste caso ∆rp−r+1,p+1 induz dr
p. Nós denotamos por κ a
primeira coluna da matriz de conexão associada a uma k-cadeia e por κ a primeira coluna
associada a uma (k + 1)-cadeia.
No capítulo 2 de�nimos σ(p+1),r+1k como uma combinação linear inteira de {hk}'s onde
cp+1,rp+1 é o menor coe�ciente líder. A próxima proposição mostra que tal combinação linear
é também uma combinação linear de σ(j),ξk ∈ ∆ξ, j = κ, . . . , p + 1, ξ = r − p − 1 + κ, . . . , r
para j − ξ = p− r + 1. Em ambos os casos as combinações lineares minimizam u.
Proposição 4.0.8. Dado um pivô mudança de base ∆rp−r+1,p+1, existem inteiros bp+1, bp, . . . ,
bκ tais que o bordo de
bp+1σ(p+1),rk + bpµ
(p),r−1σ(p),r−1k + · · ·+ bκµ
(κ),r−p−1+κσ(κ),r−p−1+κk
está acima da (p− r+1)-ésima linha. Além disso, o menor bp+1 que satisfaz tal propriedade
é u.
Demonstração: Como ∆rp−r+1,p+1 é um pivô mudança de base, ∆r
s,p+1 = 0 para todo
77

78
s > p− r + 1 e ∆r+1p−r+1,p+1 = 0. Portanto, σ(p+1),r+1
k ∈ Zr+1p ⊂ Zr
p . Pela Proposição 3.0.3
Zrp = Z[µ(p+1),rσ
(p+1),rk , µ(p),r−1σ
(p),r−1k , . . . , µ(κ),r−p−1+κσ
(κ),r−p−1+κk ]
em outras palavras,
σ(p+1),r+1k = bp+1µ
(p+1),rσ(p+1),rk + bpµ
(p),r−1σ(p),r−1k + · · ·+ bκµ
(κ),r−p−1+κσ(κ),r−p−1+κk
com bp+1, . . . , bκ inteiros. Como cp+1,r+1p+1 = ucp+1,r
p+1 então neste caso bp+1 = u. Isto mostra
que os inteiros bp+1, bp, . . . , bκ existem e que u é um possível valor para bp+1.
Finalmente, mostremos que u é o menor inteiro positivo tal que bp, . . . , bκ existem, ou
seja, o menor bp+1 é u. Suponhamos que u < u é um inteiro positivo tal que existem bp, . . . , bκ
com
σ(p+1),r+1k = uµ(p+1),rσ
(p+1),rk + bpµ
(p),r−1σ(p),r−1k + · · ·+ bκµ
(κ),r−p−1+κσ(κ),r−p−1+κk
Então
σ(p+1),r+1k = uµ(p+1),rcp+1,r
p+1 h(p+1)k + (uµ(p+1),rcp+1,r
p + bpµ(p),r−1cp,r−1
p )h(p)k + · · ·
· · ·+ (uµ(p+1),rcp+1,rκ + bpµ
(p),r−1cp,r−1κ + · · ·+ bκµ
(κ),r−p−1+κcκ,r−p−1+κκ )h
(κ)k
o que contradiz a propriedade de minimalidade de u como foi de�nido em (2.2). Portanto u
é o menor inteiro positivo tal que bp, . . . bκ existe.
A próxima Proposição estabelece uma fórmula para u quando a entrada ∆rp−r+1,p+1 é um
pivô mudança de base. Em todos os outros casos u = 1.
Proposição 4.0.9. Suponhamos que ∆rp−r+1,p+1 é um pivô mudança de base e seja u =
cp+1,r+1p+1
cp+1,rp+1
o inteiro de�nido em (2.1). Se
v = mdc{µ(p),r−1cp−r+1,r−1p−r+1 ∆r−1
p−r+1,p, . . . , µ(κ),κ−p+r−1cp−r+1,κ−p+r−1
p−r+1 ∆κ−p+r−1p−r+1,κ }/c
p−r+1,rp−r+1
e λ =v
mdc{∆rp−r+1,p+1, v}
então u = λ.

79
Demonstração: Segue da Proposição 4.0.8 que u em (2.1) é o menor inteiro positivo
tal que existem inteiros bp, . . . , bκ com
σ(p+1),r+1k = uµ(p+1),rσ
(p+1),rk + bpµ
(p),r−1σ(p),r−1k + · · ·+ bκµ
(κ),r−p−1+κσ(κ),r−p−1+κk
Como ∆rp−r+1,p+1 é um pivô mudança de base, então ∆r
s,p+1 = 0 para todo s > p− r + 1 e,
portanto, µ(p+1),r = 1. Calculando o bordo de ambos os lados da equação temos que
∂σ(p+1),r+1k = u∂σ
(p+1),rk + bpµ
(p),r−1∂σ(p),r−1k + · · ·+ bκµ
(κ),r−p−1+κ∂σ(κ),r−p−1+κk (4.1)
Como ∆rp−r+1,p+1 é um pivô mudança de base então ∆r+1
p−r+1,p+1 = 0. Portanto, o coe�ciente
de h(p−r+1)k−1 em ∂σ
(p+1),r+1k é zero. Além disso,
∂σ(p+1),rk = ∆r
p−r+1,p+1cp−r+1,rp−r+1 h
(p−r+1)k−1 + · · ·
∂σ(p),r−1k = ∆r−1
p−r+1,pcp−r+1,r−1p−r+1 h
(p−r+1)k−1 + · · ·
...
∂σ(κ),r−p−1+κk = ∆r−p−1+κ
p−r+1,κ cp−r+1,r−p−1+κp−r+1 h
(p−r+1)k−1 + · · ·
Igualando os coe�cientes de h(p−r+1)k−1 em ambos os lados da equação (4.1) temos
0=u∆rp−r+1,p+1c
p−r+1,rp−r+1 +bpµ
(p),r−1∆r−1p−r+1,pc
p−r+1,r−1p−r+1 +· · ·+bκµ(κ),r−p−1+κ∆r−p−1+κ
p−r+1,κ cp−r+1,r−p−1+κp−r+1
Assim,
u∆rp−r+1,p+1c
p−r+1,rp−r+1 =−[bpµ
(p),r−1∆r−1p−r+1,pc
p−r+1,r−1p−r+1 +· · ·+bκµ(κ),r−p−1+κ∆r−p−1+κ
p−r+1,κ cp−r+1,r−p−1+κp−r+1 ]
u∆rp−r+1,p+1 =
−[bpµ(p),r−1∆r−1
p−r+1,pcp−r+1,r−1p−r+1 + · · ·+ bκµ
(κ),r−p−1+κ∆r−p−1+κp−r+1,κ c
p−r+1,r−p−1+κp−r+1 ]
cp−r+1,rp−r+1
Segue da Proposição 4.0.8, sobre a propriedade de minimalidade de u que
u∆rp−r+1,p+1c
p−r+1,rp−r+1 =mdc{µ(p),r−1∆r−1
p−r+1,pcp−r+1,r−1p−r+1 , . . . , µ(κ),r−p−1+κ∆r−p−1+κ
p−r+1,κ cp−r+1,r−p−1+κp−r+1 }
i.e, u∆rp−r+1,p+1 = v. Portanto,
mmc{u∆rp−r+1,p+1,∆
rp−r+1,p+1} = mmc{∆r
p−r+1,p+1, v}

80
Equivalentemente,
u∆rp−r+1,p+1 = mmc{∆r
p−r+1,p+1, v}
Dividindo ambos os lados da igualdade pelo produto ∆rp−r+1,p+1.v a equação se torna
u
v=mmc{∆r
p−r+1,p+1, v}∆r
p−r+1,p+1.v
que é equivalente au
v=
1
mdc{∆rp−r+1,p+1, v}
ou seja,
u =v
mdc{∆rp−r+1,p+1, v}
= λ
Lema 4.0.10. Seja Erp = Zt[σ
(p+1),rk ] onde
t =mdc{µ(r+p),r−1cp+1,r−1
p+1 ∆r−1p+1,r+p, . . . , µ
(κ),κ−p−1cp+1,κ−p−1p+1 ∆κ−p−1
p+1,κ }cp+1,rp+1
e suponha que ∆rp−r+1,p+1 é um pivô mudança de base.
1. Se ∆rp+1,p+r+1 é um pivô mudança de base, então
Er+1p,k−p =
uZ[σ(p+1),r+1k ]
mdc{∆rp+1,p+r+1, t}Z[σ
(p+1),r+1k ]
2. Se ∆rp+1,p+r+1 é uma entrada nula com uma coluna de zeros abaixo, ou seja, ∆r
s,p+r+1 =
0 para s > p+ 1, então
Er+1p,k−p =
uZ[σ(p+1),r+1k ]
tZ[σ(p+1),r+1k ]
Analogamente, se ∆rp−r+1,p+1 é uma entrada nula com uma coluna de zeros abaixo então as
fórmulas acima valem para u = 1.
Demonstração: Como ∆rp−r+1,p+1 é um pivô mudança de base ou uma entrada nula
com uma coluna de zeros abaixo então ∆r+1p−r+1,p+1 = 0 e, portanto, σ(p+1),r+1
k ∈ Zr+1p . Segue
do Lema 3.0.5 que Er+1p,k−p =
Z[σ(p+1),r+1k ]
sZ[σ(p+1),r+1k ]
onde s é igual a
mdc{µ(p+r+1),rcp+1,rp+1 ∆r
p+1,p+r+1, µ(r+p),r−1cp+1,r−1
p+1 ∆r−1p+1,r+p, . . . , µ
(κ),κ−p−1cp+1,κ−p−1p+1 ∆κ−p−1
p+1,κ }cp+1,r+1p+1
=

81
cp+1,rp+1
mdc{µ(p+r+1),r∆rp+1,p+r+1,
mdc{µ(r+p),r−1cp+1,r−1p+1 ∆r−1
p+1,r+p, . . . , µ(κ),κ−p−1cp+1,k−p−1
p+1 ∆κ−p−1p+1,κ }
cp+1,rp+1
}
cp+1,r+1p+1
Como ∆rp+1,p+r+1 é um pivô mudança de base ou uma entrada nula com uma coluna de zeros
abaixo então µ(p+r+1),r = 1. Logo
s = cp+1,rp+1
mdc{∆rp+1,p+r+1, t}
cp+1,r+1p+1
Como ∆rp−r+1,p+1 é um pivô mudança de base então
cp+1,rp+1
cp+1,r+1p+1
=1
u
Substituindo o valor de s na expressão de Er+1p,k−p obtemos (1) e (2).
Por outro lado, é fácil ver que se ∆rp−r+1,p+1 é uma entrada nula com uma coluna de zeros
abaixo então não ocorre mudança de base e portanto cp+1,rp+1 = cp+1,r+1
p+1 , ou seja, u = 1.
Observação 4.0.11. Como uma conseqüência direta da prova do Lema 4.0.10 temos que
quando ∆rp−r+1,p+1 é um pivô mudança de base, u ≤ mdc{∆r
p+1,p+r+1, t} ≤ t.
Lema 4.0.12. Seja Erp = Z[σ
(p+1),rk ] e suponha que ∆r
p−r+1,p+1 é um pivô mudança de base.
Então
1. Se ∆rp+1,p+r+1 é um pivô primário, então
Er+1p,k−p =
uZ[σ(p+1),r+1k ]
∆rp+1,p+r+1Z[σ
(p+1),r+1k ]
2. Se ∆rp+1,p+r+1 é uma entrada nula com uma coluna de zeros abaixo, então
Er+1p,k−p = uZ[σ
(p+1),r+1k ]
Analogamente, se ∆rp−r+1,p+1 é uma entrada nula com uma coluna de zeros abaixo então as
fórmulas acima valem para u = 1.

82
· · · σ(p+r),rk+1 σ
(p+r+1),rk+1
σ(p+1),rk · · · ∆r
p+1,p+r ∆rp+1,p+r+1
r
r − 1
Figura 4.1: Diferença entre ∂Zr−1p+r−1,(k+1)−(p+r−1) e ∂Z
rp+r,(k+1)−(p+r).
Demonstração: Como ∆rp−r+1,p+1 é um pivô mudança de base ou uma entrada nula
com uma coluna de zeros abaixo então ∆r+1p−r+1,p+1 = 0 e, portanto, σ(p+1),r+1
k ∈ Zr+1p .
Segue que Zrp−1,k−(p−1) Zr+1
p,k−p. Além disso, como Erp = Z[σ
(p+1),rk ] então temos que
∂Zr−1p+r−1,(k+1)−(p+r−1) ⊆ Zr−1
p−1,k−(p−1), isto é, para todo σ(p+r−ξ),r−1−ξk+1 , ξ = 0, . . . , p + r − κ,
temos duas possibilidades: ou ∂σ(p+r−ξ),r−1−ξk+1 ∈ Zr−1
p−1,k−(p−1) e logo ∆r−1−ξp+1,p+r−ξ = 0 ou
σ(p+r−ξ),r−1−ξk+1 tem um pivô primário abaixo da (p+ 1)-ésima linha e logo µ(p+r−ξ),r−1−ξ = 0.
Mas a diferença entre ∂Zr−1p+r−1,(k+1)−(p+r−1) e ∂Z
rp+r,(k+1)−(p+r) é que este último inclui o bordo
da (p+r+1)-ésima coluna. Veja Figura 4.1. Mas a hipótese é que o elemento na (p+r+1)-
ésima coluna e (p+ 1)-ésima linha é ∆rp+1,p+r+1. Se ∆r
p+1,p+r+1 é um pivô mudança de base
então Er+1p,k−p =
Z[σ(p+1),r+1k ]
sZ[σ(p+1),r+1k ]
onde s é dado por
mdc{µ(p+r+1),rcp+1,rp+1 ∆r
p+1,p+r+1, µ(p+r),r−1cp+1,r−1
p+1 ∆r−1p+1,p+r, . . . , µ
(κ),κ−p−1cp+1,κ−p−1p+1 ∆κ−p−1
p+1,κ }cp+1,r+1p+1
=µ(p+r+1),rcp+1,r
p+1 ∆rp+1,p+r+1
cp+1,r+1p+1
=∆r
p+1,p+r+1
u
Se ∆rp+1,p+r+1 = 0 então ∂Zr
p+r,(k+1)−(p+r) ⊆ Zrp−1,k−(p−1) e E
r+1p = uZ[σ
(p+1),rk ].

83
O Lema seguinte segue de álgebra elementar e será utilizado na demonstração do resul-
tado central desta seção.
Lema 4.0.13. Suponha que m é multiplicação por um inteiro não nulo m e seja λ =v
mdc{m, v}.
1. Se Z //m // Zv então Kerm = λZ e Imm =ZλZ
=mdc{m, v}Z
vZ
2. Se Zt//m // Zv e t ≥ λ então Kerm =
λZtZ
e Imm =ZλZ
=mdc{m, v}Z
vZ
Teorema 4.0.14. Se Erp e Er
p−r são ambos não nulos, então a aplicação drp : Er
p → Erp−r é
induzida por δrp, ou seja, multiplicação pela entrada ∆r
p−r+1,p+1 quando a mesma é um pivô
primário, um pivô mudança de base ou uma entrada nula com uma coluna de zeros abaixo.
Demonstração: Suponha que Erp e Er
p−r são ambos não nulos. Mostremos que em
cada um dos casos seguintesKerδr
p
Imδrp+r
= Er+1p
É necessário analisar os casos em que ambos Erp e Er
p−r são ambos não nulos pois caso
contrário drp é zero. Segue do Teorema 3.0.6 que precisamos considerar três casos para a
entrada ∆rp−r+1,p+1: pivô primário, pivô mudança de base e uma entrada nula com uma
coluna de zeros abaixo.
1. ∆rp−r+1,p+1 é um pivô primário. Neste caso, sabemos pelo Teorema 3.0.6 que Er
p =
Z[σ(p+1),rk ]. Além disso, Er
p−r = Z[σ(p−r+1),rk−1 ]. De fato, Er
p−r não poderia ser Zt[σ(p−r+1),rk−1 ]
porque isso implicaria na existência de um pivô primário na (p− r+1)-ésima linha em
uma diagonal abaixo da r-ésima diagonal auxiliar.
Temos a seguinte seqüência:
... Z[σ(p−r+1),rk−1 ]oo Z[σ
(p+1),rk ]
δrpoo Er
p+r
δrp+roo ...oo (4.2)

84
(a) Suponhamos que Erp+r = 0
Como δrp : Z[σ
(p+1),rk ] → Z[σ
(p−r+1),rk−1 ] é multiplicação por ∆r
p−r+1,p+1 6= 0 então
Kerδrp = 0. Logo
Kerδrp
Imδrp+r
= 0.
(b) Suponha Erp+r 6= 0. Assim como no caso anterior, δr
p : Z[σ(p+1),rk ] → Z[σ
(p−r+1),rk−1 ]
é multiplicação por ∆rp−r+1,p+1 6= 0 e portanto Kerδr
p = 0.
Como Erp+r 6= 0, vamos considerar três possibilidades para ∆r
p+1,p+r+1. Tal entrada
pode ser um pivô primário, um pivô mudança de base ou uma entrada nula com
uma coluna de zeros abaixo. No entanto, como ∆rp−r+1,p+1 é um pivô primário,
pela Proposição 2.3.2 não existe pivô primário na (p + 1)-ésima linha. Assim,
∆rp+1,p+r+1 não pode ser um pivô primário e nem um pivô mudança de base.
Portanto, ∆rp+1,p+r+1 é um zero. Segue que
Kerδrp
Imδrp+r
= 0.
Por outro lado, em ambos os casos acima, como ∆rp−r+1,p+1 é um pivô primário então
σ(p+1),r+1k = σ
(p+1),rk . Notemos que seu bordo restrito à (p − r + 1)-ésima linha é
∆rp−r+1,p+1 6= 0 e portanto, seu bordo não está acima da (p− r+1)-ésima linha. Segue
que σ(p+1),r+1k /∈ Zr+1
p e, portanto, Zr+1p = Zr
p−1 and Er+1p = 0.
2. ∆rp−r+1,p+1 é um pivô mudança de base. Então existe um pivô primário na (p− r+ 1)-
ésima linha em uma diagonal abaixo da r-ésima diagonal auxiliar. Segue do Teorema
3.0.6 2(b) que Erp−r = Zv[σ
(p−r+1),rk−1 ], onde
v = mdc{µ(p)cp−r+1,r−1p−r+1 ∆r−1
p−r+1,p, . . . , µ(κ)cp−r+1,κ−p+r−1
p−r+1 ∆κ−p+r−1p−r+1,κ }/c
p−r+1,rp−r+1
Seja λ =v
mdc{∆rp−r+1,p+1, v}
. Pela Proposição 4.0.9 temos que λ = u.
(a) Se ∆rp+1,p+r+1 6= 0 é um pivô primário, segue da Proposição 2.3.2 que não existe
nem um pivô primário na (p+1)-ésima linha ou coluna e nem na (p+r+1)-ésima
linha ou coluna em uma diagonal abaixo da r-ésima diagonal auxiliar. Assim,
pelo Teorema 3.0.6 2(a) e (1), Erp = Z[σ
(p+1),rk ] e Er
p+r = Z[σ(p+r),rk+1 ]. Neste caso
temos
... Zv[σ(p−r+1),rk−1 ]oo Z[σ
(p+1),rk ]
δrpoo Z[σ
(p+r),rk+1 ]
δrp+roo ...oo (4.3)

85
σ(p+r−1),rk−1 σ
(p+1),rk σ
(p+r+1),rk+1
σ(p−r+1),rk−1 ∆r
p−r+1,p+1
σ(p+1),rk ∆r
p+1,p+r+1
σ(p+r+1),rk+1
r
Figura 4.2: ∆rp−r+1,p+1 6= 0 pivô mudança de base.
Então Imδrp+r = ∆r
p+1,p+r+1Z[σ(p+1),rk ] e, pelo Lema 4.0.13 Kerδr
p = λZ[σ(p+1),rk ].
LogoKerδr
p
Imδrp+r
=λZ[σ
(p+1),rk ]
∆rp+1,p+r+1Z[σ
(p+1),rk ]
=uZ[σ
(p+1),rk ]
∆rp+1,p+r+1Z[σ
(p+1),rk ]
Por outro lado, como ∆rp+1,p+r+1 é um pivô primário, segue do Lema 4.0.12 que
Er+1p =
uZ[σ(p+1),r+1k ]
∆rp+1,p+r+1Z[σ
(p+1),r+1k ]
(b) Se ∆rp+1,p+r+1 = 0 com uma coluna de zeros abaixo então Imδr
p+r = 0. Hence
Kerδrp
Imδrp+r
= Kerδrp
i. Erp = Z[σ
(p+1),rk ]. Neste caso segue do Lema 4.0.13 que
Kerδrp = λZ[σ
(p+1),rk ] = uZ[σ
(p+1),rk ]
Por outro lado, pelo Lema 4.0.12 temos que Er+1p = uZ[σ
(p+1),r+1k ].
ii. Erp = Zt[σ
(p+1),rk ]. Temos pelo Lema 4.0.13 que
Kerδrp =
λZ[σ(p+1),rk ]
tZ[σ(p+1),rk ]
=uZ[σ
(p+1),rk ]
tZ[σ(p+1),rk ]
Por outro lado, segue do Lema 4.0.10 que Er+1p = uZt[σ
(p+1),r+1k ].

86
(c) Se ∆rp+1,p+r+1 6= 0 é um pivô mudança de base então existe um pivô primário na
(p+1)-ésima linha e numa diagonal auxiliar abaixo de r. Segue do Teorema 3.0.6
2(b) que Erp,k−p = Zt[σ
(p+1),rk ] onde
t = mdc{µ(r+p),r−1cp+1,r−1p+1 ∆r−1
p+1,r+p, . . . , µ(κ),κ−p−1cp+1,κ−p−1
p+1 ∆κ−p−1p+1,κ }/c
p+1,rp+1
Seja λ =t
mdc{∆rp+1,p+r+1, t}
.
... Zv[σ(p−r+1),rk−1 ]oo Zt[σ
(p+1),rk ]
δrpoo Er
p+r
δrp+roo ...oo (4.4)
Temos que Erp+r = Z[σ
(p+r),rk ] ou Er
p+r = Zw[σ(p+r),rk ]. No entanto, sabemos pela
Observação 4.0.11 e pela Proposição 4.0.9 que λ = u ≤ t e λ = cp+r,r+1p+r /cp+r,r
p+r ≤ w.
Segue do Lema 4.0.13 que
Kerδrp =
λZ[σ(p+1),rk ]
tZ[σ(p+1),rk ]
and Imδrp+r =
Z[σ(p+1),rk ]
λZ[σ(p+1),rk ]
=mdc{∆r
p+1,p+r+1, t}Z[σ(p+1),rk ]
tZ[σ(p+1),rk ]
EntãoKerδr
p
Imδrp+r
=λZ[σ
(p+1),rk ]
mdc{∆rp+1,p+r+1, t}Z[σ
(p+1),rk ]
Por outro lado, como ∆rp+1,p+r+1 é um pivô mudança de base, segue do Lema
4.0.10 que Er+1p =
uZ[σ(p+1),r+1k ]
mdc{∆rp+1,p+r+1, t}Z[σ
(p+1),r+1k ]
onde u = λ pela Proposição
4.0.9.
(d) Se ∆rp+1,p+r+1 é uma entrada acima de um pivô primário então existe um pivô
primário na (p+r+1)-ésima coluna abaixo de ∆rp+1,p+r+1. Portanto, µ
(p+r+1),r = 0
e σ(p+r+1),rk+1 /∈ Zr
p+r. Logo Erp+r = 0 e, portanto, Imδr
p+r = 0. Então
Kerδrp
Imδrp+r
= Kerδrp
i. Se Erp,k−p = Z[σ
(p+1),rk ], temos a seqüência
... Zv[σ(p−r+1),rk−1 ]oo Z[σ
(p+1),rk ]
δrpoo 0
δrp+roo ...oo (4.5)
e, pelo Lema 4.0.13
Kerδrp = λZ[σ
(p+1),rk ] = uZ[σ
(p+1),rk ]

87
ii. Se Erp,k−p = Zt[σ
(p+1),rk ], então
... Zv[σ(p−r+1),rk−1 ]oo Zt[σ
(p+1),rk ]
δrpoo 0
δrp+roo ...oo (4.6)
e, pelo Lema 4.0.13 temos
Kerδrp =
λZ[σ(p+1),rk ]
tZ[σ(p+1),rk ]
= uZt[σ(p+1),rk ]
Por outro lado, sabemos pelo Lema 3.0.5 que Er+1p,k−p =
Z[σ(p+1),r+1k ]
sZ[σ(p+1),r+1k ]
onde s é
dado por
mdc{µ(p+r+1),rcp+1,rp+1 ∆r
p+1,p+r+1, . . . , µ(κ),κ−p−1cp+1,κ−p−1
p+1 ∆κ−p−1p+1,κ }
cp+1,r+1p+1
= cp+1,rp+1
mdc{µ(p+r+1),r∆rp+1,p+r+1, t}
cp+1,r+1p+1
Como µ(p+r+1),r = 0 então s = t/u. Quando Erp,k−p = Zt[σ
(p+1),rk ] como em (ii),
Er+1p,k−p =
uZ[σ(p+1),r+1k ]
tZ[σ(p+1),r+1k ]
Quando Erp,k−p = Z[σ
(p+1),rk ] como em (i) tomamos t = 0 e, portanto, Er+1
p =
uZ[σ(p+1),r+1k ].
3. ∆rp−r+1,p+1 = 0 com uma coluna de zeros abaixo. Neste caso Kerδr
p = Erp . Além disso,
σ(p+1),rk = σ
(p+1),r+1k , logo u = 1.
(a) Se ∆rp+1,p+r+1 é uma entrada acima de pivô primário então como em 2.(d) temos
µ(p+r+1),r = 0 e Erp+r = 0. Logo Imδr
p+r = 0 e então
Kerδrp
Imδrp+r
= Erp
Por outro lado, como µ(p+r+1),r = 0 então Er+1p = Er
p .
(b) Se ∆rp+1,p+r+1 = 0 com uma coluna de zeros abaixo então Imδr
p+r = 0 e
Kerδrp
Imδrp+r
= Erp
Por outro lado, segue dos Lemas 4.0.10 e4.0.12 que Er+1p = Er
p .

88
(c) Se ∆rp+1,p+r+1 6= 0 é um pivô primário então não existe um pivô primário na
(p+ 1)-ésima linha e nem na (p+ r + 1)-ésima coluna em uma diagonal auxiliar
abaixo de r. Logo Erp = Z[σ
(p+1),rk ] e Er
p+r = Z[σ(p+r+1),rk ].
... Erp−r
oo Z[σ(p+1),rk ]
δrpoo Z[σ
(p+r+1),rk+1 ]
δrp+roo ...oo (4.7)
Portanto,Kerδr
p
Imδrp+r
=Z[σ
(p+1),rk ]
∆rp+1,p+r+1Z[σ
(p+1),rk ]
Por outro lado, como ∆rp+1,p+r+1 é um pivô primário, pelo Lema 4.0.12
Er+1p,k−p =
Z[σ(p+1),r+1k ]
∆rp+1,p+r+1Z[σ
(p+1),r+1k ]
(d) Se ∆rp+1,p+r+1 é um pivô mudança de base, então existe um pivô primário na (p+
1)-ésima linha em uma diagonal auxiliar abaixo de r. Portanto, Erp = Zt[σ
(p+1),rk ].
... Erp−r
oo Zt[σ(p+1),rk ]
δrpoo Er
p+r
δrp+roo ...oo (4.8)
Erp+r pode ser Z[σ
(p+r+1),rk+1 ] ou Zw[σ
(p+r+1),rk+1 ]. Sejam λ =
t
mdc{∆rp+1,p+r+1, t}
e u =
cp+r+1,rp+r+1
cp+r+1,r+1p+r+1
. Como ∆rp+1,p+r+1 é um pivô mudança de base, então pela Proposição
4.0.9 e pela Observação 4.0.11 para (p+ r) temos
λ = u ≤ mdc{∆rp+1,p+r+1, w} ≤ w
ou seja, λ ≤ w. Pelo Lema 4.0.13
Imδrp+r =
mdc{∆rp+1,p+r+1, t}Z[σ
(p+1),rk ]
tZ[σ(p+1),rk ]
LogoKerδr
p
Imδrp+r
=Z[σ
(p+1),rk ]
mdc{∆rp+1,p+r+1, t}Z[σ
(p+1),rk ]
Por outro lado, como ∆rp−r+1,p+1 é uma entrada nula com uma coluna de zeros
abaixo, segue do Lema 4.0.10 que
Er+1p,k−p =
Z[σ(p+1),r+1k ]
mdc{∆rp+1,p+r+1, t}Z[σ
(p+1),r+1k ]

89
Assim, vimos que para todos os casos
Kerdrp
Imdrp+r
= Er+1p,k−p =
Kerδrp
Imδrp+r
Observação 4.0.15. Considere novamente uma �ltração F mais grossa como na seção 3.0.1.
Neste caso a candidata à aplicação δRP,Q que induz a diferencial dR
P,Q é
∆RJP−R,JP
∆mP−1−mP−R−1
mP−R−1+1,mP−1+1 · · · ∆mP−mP−R−1−1mP−R−1+1,mP
......
∆mP−1−mP−R+1mP−R,mP−1+1 · · · ∆
mP−mP−RmP−R,mP
Note que cada entrada desta matriz é da forma ∆r
i,j com j − i = r o que implica que a
mesma pertence à diagonal r de ∆r.

Capítulo 5
Análise da Seqüência Espectral para a
existência de órbitas conectantes
Neste capítulo, analisamos as implicações dinâmicas das diferenciais não nulas dr em uma
seqüência espectral associada a um �uxo Morse ϕ. Mostramos que, embora nem sempre
tenhamos uma órbita conectante no �uxo ϕ associada a dr, sempre existe um caminho
formado por órbitas de ϕ determinado por dr.
Teorema 5.0.16. Sejam ϕ um �uxo gradiente de uma função de Morse f e ∆ a matriz de
conexão sobre Z da decomposição de Morse tal que cada conjunto de Morse é uma singula-
ridade não degenerada. Seja (Er, dr) uma seqüência espectral induzida pelo complexo de ca-
deias de Morse Conley (Z〈critf〉,∆). Dada uma diferencial não nula dr : Erp,q → Er
p−r,q+r−1
da seqüência espectral, existe um caminho de órbitas conectantes ϕ unindo a singularidade
h(p+1)k que gera E1
p,q à singularidade h(p−r+1)k−1 que gera E1
p−r,q+r−1.
Adotamos a seguinte de�nição para um caminho em um �uxo. Um caminho associado a
dr é a justaposição de curvas que coincidem com as órbitas conectantes tais que as órbitas
representadas na matriz ∆ξ por um pivô primário ou um pivô mudança de base ∆ξi,j para
ξ < r podem ser consideradas na direção reversa.
Mais precisamente, seja γi,j um caminho entre as singularidades h(j)k e h(i)
k−1. Se γi,j
corresponde a uma órbita conectante no �uxo, dizemos que γi,j é um caminho elementar
90

91
e de�nimos o comprimento de γi,j como `(γi,j) = (j − i). No entanto, quando γi,j não
corresponde a uma órbita conectante no �uxo, γi,j pode ser escrito como uma seqüência de
caminhos elementares. Esta construção é feita recursivamente de�nindo
γi,j = [γi,j,−γi,j, γi,j]
onde j < j e i > i, isto é, h(j)k está associada a uma coluna de ∆ à esquerda de h(j)
k e h(i)k−1
está associado a uma linha de ∆ abaixo de h(i)k−1.
O sinal negativo indica que γi,j é considerado na direção reversa. Se γi,j é um caminho
elementar, a órbita conectante correspondente é considerada na orientação invertida. Se γi,j
não corresponde a uma órbita conectante então é um caminho
γi,j = [γi,j,−γ
i,j, γ
i,j]
onde j < j e i > i, e de�nimos
−γi,j = −[γi,j,−γ
i,j, γ
i,j] = [−γ
i,j, γ
i,j,−γ
i,j]
O comprimento de γi,j = [γi,j,−γi,j, γi,j] é de�nido como `(γi,j) = `(γi,j)+`(γi,j)+`(γi,j).
No lema seguinte, mostramos que certas colunas não precisam ser consideradas nas mu-
danças de base do método da varredura.
Lema 5.0.17. Seja ∆rp−r+1,p+1 um pivô mudança de base. A escolha das colunas de ∆r que
farão parte da combinação linear do método da varredura que determinará a (p + 1)-ésima
coluna de ∆r+1 não precisa levar em consideração nenhuma coluna correspondente a uma
cadeia cujo bordo esteja acima da (p−r+1)-ésima linha, ou seja, se existe uma combinação
linear do método envolvendo uma coluna cujo bordo está acima da (p − r + 1)-ésima linha
então existe uma outra combinação linear que não envolve tal coluna e que pode ser escolhida.
Demonstração: Sabemos que
Er+1p,k−p =
Zr+1p,k−p
Zrp−1,k−(p−1) + ∂Zr
p+r,(k+1)−(p+r)
onde

92
Zr+1p,k−p = Z[µ(p+1),r+1σ
(p+1),r+1k , µ(p),rσ
(p),rk , . . . , µ(κ),r−p+κσ
(κ),r−p+κk ]
Zrp−1,k−p+1 = Z[µ(p),rσ
(p),rk , µ(p−1),r−1σ
(p−1),r−1k , . . . , µ(κ),r−p+κσ
(κ),r−p+κk ]
Além disso, pela Proposição 4.0.8 temos que
σ(p+1),r+1k = uµ(p+1),rσ
(p+1),rk + bpµ
(p),r−1σ(p),r−1k + · · ·+ bκµ
(κ),r−p−1+κσ(κ),r−p−1+κk
Suponhamos que para algum ξ ∈ {1, 2, . . . , p+1−κ}, σ(p+1−ξ),r−ξk seja tal que ∂σ(p+1−ξ),r−ξ
k
é zero na (p− r + 1)-ésima linha e µ(p+1−ξ),r−ξ = 1, isto é, ∆r−ξp−r+1,p+1−ξ = 0 e ∆r−ξ
s,p+1−ξ = 0
para todo s > p + r − 1. Neste caso, ∂σ(p+1−ξ),r−ξk está acima da (p − r)-ésima linha e,
portanto σ(p+1−ξ),r−ξk = σ
(p+1−ξ),r−ξ+1k ∈ Zr
p−1,k−(p−1). Pela fórmula temos que
Er+1p,k−p =
Z[µ(p+1),r+1σ(p+1),r+1k , . . . , σ
(p+1−ξ),r+1−ξk , . . . , µ(κ),r−p+κσ
(κ),r−p+κk ]
Z[µ(p),rσ(p),rk , . . . , σ
(p+1−ξ),r+1−ξk , . . . , µ(κ),r−p+κσ
(κ),r−p+κk ] + ∂Zr
p+r,(k+1)−(p+r)
=Z[µ(p+1),r+1σ
(p+1),r+1k − σ
(p+1−ξ),r+1−ξk , . . . , σ
(p+1−ξ),r+1−ξk , . . . , µ(κ),r−p−1+κσ
(κ),r−p+κk ]
Z[µ(p),rσ(p),rk , . . . , σ
(p+1−ξ),r+1−ξk , . . . , µ(κ),r−p+κσ
(κ),r−p+κk ] + ∂Zr
p+r,(k+1)−(p+r)
=Z[µ(p+1),r+1σ
(p+1),r+1k − σ
(p+1−ξ),r−ξk , . . . , µ(κ),r−p+κσ
(κ),r−p+κk ]
Z[µ(p),rσ(p),rk , . . . , µ(κ),r−p+κσ
(κ),r−p+κk ] + ∂Zr
p+r,(k+1)−(p+r)
A última igualdade segue do fato que o gerador σ(p+1−ξ),r−ξ+1k pode ser substituído pelo
gerador σ(p+1−ξ),r−ξk .
A conseqüência disto é que não há perda de generalidade em escolher a mudança de base
que não soma as colunas que têm uma entrada nula na (p+ r−1)-ésima linha e zeros abaixo
da mesma.
Seja ∆0 = ∆. Mostramos que o método da varredura produz uma seqüência de matrizes
∆r tal que a matriz ∆r+1 é obtida a partir de uma mudança de base em ∆r, ou seja, existe
uma seqüência de matrizes mudança de base M0, . . . ,Mm−1 tais que
∆r+1 = M−1r ∆rMr = M−1
r M−1r−1 . . .M
−10 ∆M0 . . .Mr−1Mr
para r = 0, . . . ,m− 1.

93
Para cada r ∈ {0, . . . ,m − 1} de�nimos ∆r como sendo a matriz ∆M0 . . .Mr−1Mr.
Portanto, se κ∗ é a primeira hk−1 coluna de ∆ e κ é a última hk−1 coluna de ∆ então
podemos escrever
∂σ(j),r = ∆r
eκ,jh(eκ)k−1 + · · ·+ ∆
r
κ∗,jh(κ∗)k−1
onde ∆r
s,j ∈ Z para s = κ∗, . . . , κ.
Proposição 5.0.18. ∆r
s,j = 0 para todo s > i se e somente se ∆rs,j = 0 para todo s > i.
Demonstração: Sabemos que
∂σ(j),r = ∆r
eκ,jh(eκ)k−1 + · · ·+ ∆
r
κ∗,jh(κ∗)k−1 e ∂σ(j),r = ∆r
eκ,jσ(eκ),rk−1 + · · ·+ ∆r
κ∗,jσ(κ∗),rk−1
Suponha que ∆r
s,j = 0 para todo s > i, ou seja,
∂σ(j),r = ∆r
i,jh(i)k−1 + · · ·+ ∆
r
κ∗,jh(κ∗)k−1
Como o coe�ciente de h(eκ)k−1 é sempre não nulo em σ
(eκ),rk−1 e não está em nenhum outro σ(s),r
k−1
para s < κ então ∆reκ,j = 0, ou seja,
∂σ(j),r = ∆reκ−1,jσ
(eκ−1),rk−1 + · · ·+ ∆r
κ∗,jσ(κ∗),rk−1
Da mesma forma, o coe�ciente de h(eκ−1)k−1 é sempre não nulo em σ
(eκ−1),rk−1 e não está em nenhum
outro σ(s),rk−1 para s < κ− 1 então ∆r
eκ−1,j = 0, ou seja,
∂σ(j),r = ∆reκ−2,jσ
(eκ−2),rk−1 + · · ·+ ∆r
κ∗,jσ(κ∗),rk−1
Repetimos este mesmo raciocínio para todo h(s)k−1, s = κ, . . . , i+ 1.
Portanto, ∆rs,j = 0 para todo s > i, ou seja,
∂σ(j),r = ∆ri,jσ
(i),rk−1 + · · ·+ ∆r
κ∗,jσ(κ∗),rk−1
A recíproca é completamente análoga.
Como uma conseqüência direta da Proposição 5.0.18 temos que ∆rp−r,p é um pivô se e
somente se ∆r
p−r,p 6= 0 e ∆r
s,p = 0 para todo s > p− r.

94
É claro que ∆rnão tem necessariamente quadrado zero. No entanto, a mesma será usada
como matriz auxiliar para mostrar o resultado central da seção 5.
A prova do Teorema 5.0.16 é uma conseqüência direta do Lema seguinte.
Lema 5.0.19. Seja ∆ uma matriz de conexão. Aplicando o método da varredura em ∆,
seja ∆r a matriz obtida depois que a r-ésima diagonal foi varrida. Se ∆r
j−ξ,j 6= 0 para algum
ξ, então existe um caminho γj−ξ,j = [γj−r,j,−γj−r,j−ζ , γj−ξ,j−ζ ] para algum r e ζ menor do
que r no �uxo ϕ formado por órbitas conectantes unindo a singularidade h(j)k à singularidade
h(j−ξ)k−1 .
Demonstração: Provemos por indução em r e ξ.
1. r = 1. Como σ(j),1k = h
(j)k então ∆
1
s,j = ∆s,j para s = κ∗, . . . , κ onde κ∗ e κ são a
primeira e a última coluna associadas a uma (k − 1)-cadeia. Assim, todas as entradas
não nulas ∆1
j−ξ,j para todo ξ representam a existência de órbitas conectantes entre h(j)k
e h(j−ξ)k−1 . Para cada ξ temos um caminho no �uxo ϕ que é uma órbita conectante.
2. Suponha que o Lema vale para todo r′ < r e ξ′ < ξ e seja ∆r
j−ξ,j 6= 0. Se existe uma
órbita conectante entre h(j)k e h(j−ξ)
k−1 então nada precisa ser mostrado. Em particular,
é esse o caso quando ∆1
j−ξ,j 6= 0, pois ∆1
j−ξ,j = ∆j−ξ,j e, neste caso existe uma órbita
conectante entre h(j)k e h(j−ξ)
k−1 . Assim, suponhamos que ∆1
j−ξ,j = 0 e que não existem
órbitas conectantes entre h(j)k e h(j−ξ)
k−1 e mostremos que se ∆r
j−ξ,j 6= 0, então existe um
caminho de órbitas conectantes unindo tais singularidades.
Como ∆r
j−ξ,j 6= 0 e ∆1
j−ξ,j = 0 então existe r < r, r < ξ, tal que ∆r
j−ξ,j = 0 e ∆r+1
j−ξ,j 6= 0,
ou seja, σ(j),rk 6= σ
(j),r+1k . Note que r não precisa ser único. No caso de existir mais de
um elemento com a mesma propriedade, podemos escolher aleatoriamente qual usar
na demonstração da existência de um caminho. A escolha de r é importante quando
tratamos da minimização do comprimento do caminho. Abordamos este assunto no
capítulo 6.
O método da varredura a�rma que uma mudança de base somente ocorre na j-ésima
coluna de uma matriz quando um pivô mudança de base está presente na mesma.

95
Neste caso, a mudança acontece precisamente quando o método da varredura passa
por uma diagonal como r em ∆r. Assim, existe um pivô mudança de base na j-ésima
coluna e na r-ésima diagonal auxiliar de ∆r. Este pivô mudança de base é ∆rj−r,j e
está na (j−r)-ésima linha de ∆r. Pela Proposição 5.0.18 ∆r
j−r,j 6= 0 e tem uma coluna
de zeros abaixo, ou seja, ∆r
j−r,j = cj−r,rj−r ∆r
j−r,j 6= 0.
Sabemos pelo Lema 4.0.8 que
∂σ(j),r+1k = uµ(j),r∂σ
(j),rk + bj−1µ
(j−1),r−1∂σ(j−1),r−1k + · · ·+ bκµ
(κ),r−j+κ∂σ(κ),r−j+κk (5.1)
Igualando os coe�cientes de h(j−r)k−1 em ambos os lados da equação (5.1) (ou seja,
restringindo-a a (j − r)-ésima linha de ∆) obtemos
0 = ∆r+1
j−r,j = uµ(j),r∆r
j−r,j + bj−1µ(j−1),r−1∆
r−1
j−r,j−1 + · · ·
· · ·+ µ(j−ζ),r−ζbj−ζ∆r−ζ
j−r,j−ζ + · · ·+ bκµ(κ),r−j+κ∆
r−j+κ
j−r,κ
Sabemos que quando um pivô primário de uma coluna correspondente a uma cadeia
σ(j−ζ),r−ζ está abaixo da (j − r)-ésima linha então µ(j−ζ),r−ζ = 0. Em outras palavras,
µ(j−ζ),r−ζ = 1 somente quando na (j− r)-ésima linha de ∆r−ζ existe um pivô primário,
um pivô mudança de base ou uma entrada nula com uma coluna de zeros abaixo
Pelo Lema 5.0.17 podemos assumir sem perda de generalidade que em uma mudança
de base, colunas com entradas nulas na (j− r)-ésima linha de ∆r−ζ e zeros abaixo não
são consideradas. Portanto, µ(j−ζ),r−ζ = 1 e bj−ζ 6= 0 somente quando ∆r−ζj−r,j−ζ é um
pivô primário ou um pivô mudança de base. Pela Proposição 5.0.18 ∆r−ζ
j−r,j−ζ 6= 0 e
tem uma coluna de zeros abaixo, ou seja, ∆r−ζ
j−r,j−ζ = cj−r,r−ζj−r ∆r−ζ
j−r,j−ζ 6= 0.
Igualando os coe�cientes de h(j−ξ)k−1 em ambos os lados da equação (5.1) (ou seja, res-
tringindo a equação à (j − ξ)-ésima linha de ∆) temos que
∆r+1
j−ξ,j = uµ(j),r∆r
j−ξ,j + bj−1µ(j−1),r−1∆
r−1
j−ξ,j−1 + · · ·
· · ·+ µ(j−ζ),r−ζbj−ζ∆r−ζ
j−ξ,j−ζ + · · ·+ bκµ(κ),r−j+κ∆
r−j+κ
j−ξ,κ

96
Como ∆r+1
j−ξ,j 6= 0 e ∆r
j−ξ,j = 0, então existe ζ ∈ {1, j − κ} tal que µ(j−ζ),r−ζ = 1,
bj−ζ 6= 0 e ∆r−ζ
j−ξ,j−ζ 6= 0.
• Como ∆r−ζ
j−ξ,j−ζ 6= 0 é tal que ξ − ζ < ξ e r− ζ < r então por hipótese de indução
existe um caminho γj−ξ,j−ζ de órbitas conectantes unindo h(j−ζ)k a h(j−ξ)
k−1 ;
• Como ∆r−ζ
j−r,j−ζ 6= 0 é tal que r− ζ < ξ e r− ζ < r então por hipótese de indução
existe um caminho γj−r,j−ζ de órbitas conectantes unindo h(j−ζ)
k a h(j−r)k−1 ;
• Como ∆r
j−r,j 6= 0 é tal que r < ξ e r < r então por hipótese de indução existe um
caminho γj−r,j de órbitas conectantes unindo h(j)k a h(j−r)
k−1 ;
Portanto, γj−ξ,j = [γj−r,j,−γj−r,j−ζ , γj−ξ,j−ζ ] é um caminho unindo h(j)k a h(j−ξ)
k−1 .
Assim, mostramos que ∆r
j−ξ,j 6= 0 corresponde a um caminho no �uxo ϕ.
Demonstração: [do Teorema 5.0.16] Seja drp 6= 0. Segue do Teorema 4.0.14 que
toda diferencial dr 6= 0 é induzida por multiplicação pela entrada ∆rp−r+1,p+1, que é um pivô
primário ou um pivô mudança de base. Pela Proposição 5.0.18, ∆r
p−r+1,p+1 6= 0 e todas
as entradas na (p + 1)-ésima coluna abaixo da (p − r + 1)-ésima linha são nulas, ou seja,
∆r
p−r+1,p+1 = cp−r+1,rp−r+1 ∆r
p−r+1,p+1 6= 0. Pelo Lema 5.0.19 existe um caminho no �uxo formado
por órbitas conectantes unindo a singularidade h(p+1)k a singularidade h(p−r+1)
k−1 .
Exemplo 5.0.20. Considere o Exemplo 2.2.1. Notemos que a entrada ∆85,13 = 3 é um
pivô primário em ∆8 que tinha sua entrada original em ∆ igual a zero, ou seja, ∆5,13 = 0.
Portanto, não há necessariamente uma órbita conectante entre h(13)k+1 e h(5)
k . No entanto,
vamos agora determinar um caminho de órbitas conectantes entre tais singularidades.
Notemos que
∂σ(13),4k+1 = −h(9)
k + h(8)k + 4h
(7)k − 3h
(6)k + h
(4)k
∂σ(13),5k+1 = −h(7)
k + h(6)k + h
(5)k − 2h
(4)k

97
σ(10),1k+1 σ
(13),4k+1 /σ
(13),5k+1
h(4)k 0 1/− 2
h(5)k 1 0/1
h(6)k −3 −3/1
h(7)k 3 4/− 1
h(8)k −1 1/0
h(9)k 2 −1/0
ξ = 8
r = 4
∆5
5,13
∆4
9,13
∆1
9,10
∆1
5,10
r − ζ = 1
∆4
5,13
∆5
9,13
Figura 5.1: Representação esquemática do caminho γ5,13.
e portanto ∆4
5,13 = 0 e ∆5
5,13 = 1 6= 0. Portanto, consideremos r = 4. Representamos o
caminho esquematicamente usando uma matriz como na Figura 5.1. Calculando as entradas
da prova do Lema 5.0.19 temos
• ∆r
j−r,j = ∆4
13−4,13 = ∆4
9,13 6= 0.
• ∆r−ζ
j−r,j−ζ = ∆4−3
13−4,13−3 = ∆1
9,10 6= 0
• ∆r−ζ
j−ξ,j−ζ = ∆4−3
13−8,13−3 = ∆1
5,10 6= 0
Pelo Lema 5.0.19, um caminho entre h(13)k+1 em h
(5)k é γ5,13 = [γ9,13,−γ9,10, γ5,10]. Veja
Figura 5.2.
O comprimento de γ5,13 é `(γ5,13) = `(γ9,13) + `(γ9,10) + `(γ5,10) = 4 + 1 + 5 = 10.
Notemos que poderíamos escolher o caminho composto pelas conexões que correspondem
às entradas ∆6
7,13 6= 0, ∆4
7,11 6= 0 e ∆4
5,11 6= 0, ou seja, γ′5,13 = [γ′7,13,−γ′7,11, γ′5,11] Veja Figura
5.3.

98
(L, ∆)
h13k+1
h12k+1
h11k+1
h10k+1
h9k
h8k
h7k
h6k
h5k
h4k
h3k−1
h2k−1
-1
1
3
2
-3
-1
1
4
-3
1
h10
h14n
Figura 5.2: Caminho γ5,13
As entradas ∆6
7,13 e ∆4
7,11 correspondem a órbitas conectantes em ϕ, pois ∆1
7,13 6= 0
e ∆1
7,11 6= 0. Por outro lado, ∆1
5,11 = 0, ou seja, não existe necessariamente uma órbita
conectante entre h(11)k+1 e h
(5)k . No entanto, existe um caminho γ′5,11 entre h
(11)k+1 e h
(5)k composto
por órbitas conectantes correspondentes às entradas ∆2
9,11 6= 0, ∆1
9,10 6= 0 e ∆1
5,10 6= 0, ou
seja
γ′5,13 = [γ′7,13,−γ′7,11, [γ′9,11,−γ′9,10, γ
′5,10]]
Veja Figura 5.4.
O comprimento de γ′5,13 é `(γ′5,13) = `(γ′7,13) + `(γ′7,11) + `(γ′9,11) + `(γ′9,10) + `(γ′5,10) =
6 + 4 + 2 + 1 + 5 = 18.
Isto mostra que o caminho entre duas singularidades muitas vezes não é único. Mesmo
para um comprimento �xado o caminho não é necessariamente único.

99
σ(10),1k+1 σ
(11),2k+1 /σ
(11),4k+1 σ
(13),6k+1
h(4)k 0 1/0 0
h(5)k 1 0/− 2 1
h(6)k −3 −2/− 5 0
h(7)k 3 2/5 −1
h(8)k −1 1/0 0
h(9)k 2 −2/0 0
ξ = 8
∆6
5,13
∆6
7,13
∆4
7,11
∆4
5,11
∆2
9,11
∆1
9,10
∆1
5,10
Figura 5.3: Representação esquemática do caminho γ′5,13.

100
(L, ∆)
h13k+1
h12k+1
h11k+1
h10k+1
h9k
h8k
h7k
h6k
h5k
h4k
h3k−1
h2k−1
-1
1
3
2
-3-2
2
1
-2
1
-1
1
4
-3
1
h10
h14n
Figura 5.4: Caminho γ′5,13.

Capítulo 6
Conclusão
Neste trabalho começamos a explorar a seqüência espectral e suas implicações dinâmicas.
A medida que r cresce, o Z-módulo Erp muda de geradores. Através dos Teoremas 3.0.6 e
4.0.14, a varredura conecta esta mudança de geradores dos Z-módulos Erp às mudanças de
base sobre Q da matriz de conexão ∆. Na varredura, destacam-se entradas importantes da
diagonal auxiliar r de ∆r que determinam a matriz do próximo estágio ∆r+1. Tais entradas
são chamadas de pivôs primários e pivôs mudança de base (veja Seção 2). Cabe destacar
a integralidade destes pivôs durante toda a varredura, mostrada na proposição 3.0.4. São
precisamente estas entradas que determinam os módulos Erp . Estas matrizes são obtidas da
anterior por mudanças de base sobre os racionais Q. No entanto, permanece em aberto a
questão da interpretação das matrizes intermediárias deste processo. Em particular o que
signi�cam dinamicamente as entradas de tais matrizes que são racionais porém não inteiras.
Apesar das matrizes intermediárias do método da varredura possivelmente terem entra-
das fracionárias, observamos nos exemplos que a matriz correspondente à estabilização da
seqüência espectral (última matriz da varredura) tem entradas inteiras. Uma pergunta em
aberto é se este fato sempre ocorre e, se sim, qual a relação do �uxo inicial com o �uxo
associado à matriz correspondente a estabilização, ou seja, qual o efeito da mudança de base
provocada pela varredura nas matrizes de conexão. Vários exemplos indicam que podemos
ter uma continuação.
101

102
Exemplo 6.0.21. Voltemos ao Exemplo 1.5.2. Consideremos primeiramente o caso em que
0 < θ < θ∗. Neste caso a ordem do �uxo é tal que 1 <ϕ 2 é a única relação. Como a matriz
de conexão é triangular superior com diagonal principal nula, então somente ∆(2, 1) pode
ser não nula. Além disso,
• H0(c(M1)) = Z , H1(c(M1)) = 0,
• H0(c(M2)) = 0, H1(c(M2)) = Z,
• H0(c(M21)) = H1(c(M21)) = 0,
Temos então a seqüência exata em homologia
0 // H1(c(M21))p // H1(c(M2))
∂(2,1) // H0(c(M1))i // H0(c(M21))
p // 0
que é equivalente a
0 // Z∂(2,1) // Z // 0
Logo ∆(2, 1) é um isomor�smo. A representação qualitativa do �uxo, bem como sua matriz
de conexão estão na Figura 6.1.
M2 M1
M3
0 1 0
0 0 0
0 0 0
Figura 6.1: Representação do �uxo e sua matriz de conexão - 0 < θ < θ∗
.
Consideremos agora θ > θ∗. Neste caso a ordem do �uxo é dada pelas relações 1 <ϕ 2 e
1 <ϕ 3. Como a matriz de conexão é triangular superior com diagonal principal nula, então
somente ∆(2, 1) e ∆(3, 1) podem ser não nulas. Por um argumento idêntico ao anterior

103
M2 M1
M3
0 1 1
0 0 0
0 0 0
Figura 6.2: Representação do �uxo e sua matriz de conexão - θ > θ∗.
temos que ∆(2, 1) e ∆(3, 1) são isomor�smos. A representação qualitativa do �uxo, bem
como sua matriz de conexão estão na Figura 6.2.
Apliquemos o método da varredura na matriz de conexão associada à Mθ para θ > θ∗.
Veja Figura 6.3. A matriz de conexão associada à estabilização é exatamente a matriz
σ(1),10 σ
(2),11 σ
(3),11
σ(1),10 = h0 0 1 1
σ(2),11 = h
(2)1 0 0 0
σ(3),11 = h
(3)1 0 0 0
σ(1),20 σ
(2),21 σ
(3),21
σ(1),20 = h0 0 1 1
σ(2),21 = h
(2)1 0 0 0
σ(3),21 = h
(3)1 0 0 0
σ(1),30 σ
(2),31 σ
(3),31
σ(1),30 = h0 0 1 0
σ(2),31 = h
(2)1 0 0 0
σ(3),31 = h
(3)1 − h
(2)1 0 0 0
Figura 6.3: Varredura.
associada à Mθ para θ < θ∗.
Assim como este, há outros exemplos que indicam que devemos ter uma continuação da
decomposição de Morse inicial.

104
Uma pergunta interessante que surge na investigação desta seqüencia espectral dinâmica
é a interpretação do aparecimento de torção. Este trabalho foi desenvolvido para seqüências
espectrais cujos espaços Er são Z-módulos. Desta forma, pode aparecer torção na seqüência
espectral antes do cancelamento algébrico de um Z-módulo Erp e as vezes a torção permanece
na estabilização. Que signi�cado dinâmico tem essa torção nos dois diferentes casos? A
investigação do signi�cado dinâmico do aparecimento de torção nos Z-módulos da seqüencia
espectral no seu processo de estabilização é uma pergunta em aberto. Em particular quando
esta torção provoca o cancelamento algébrico de um Z no próximo estágio da seqüência.
Que signi�cado tem a estabilização? Em que casos representa a homologia da variedade?
Outra motivação para a investigação da seqüência espectral dinâmica é o estudo das
órbitas longas do �uxo. Estas órbitas têm energia alta, ou seja, a variação do funcional ação
ao longo de tais órbitas é grande. Detectar energia alta é signi�cativo geometricamente,
[BaC]. Neste trabalho atingimos este objetivo provando o Teorema 5.0.16 do caminho Zig-zag
ao longo do �uxo. Mostramos a existência de um caminho de linhas de �uxo ϕ conectando
duas singularidades consecutivas. Dada uma entrada não nula ∆p−r+1,p+1 em ∆, existe
uma órbita conectante unindo duas singularidades. Por outro lado, se ∆p−r+1,p+1 é zero,
mostramos que existe um caminho unindo as singularidades hk ∈ Fp e hk−1 ∈ Fp−r quando
∆rp−r+1,p+1 corresponde a uma diferencial não nula da seqüência espectral, ou seja, dr
p 6= 0.
Isto signi�ca que, quando a diferencial dr é não nula, existe uma curva feita de arcos de
órbitas do �uxo, onde alguns desses arcos podem ser percorridos no sentido reverso ao �uxo.
Constituem problemas em aberto a minimização do tempo em que se anda no �uxo reverso
bem como a caracterização do tipo de órbita em que isso é possível.
A di�culdade em determinar caminhos minimais é que entradas nulas ∆i,j podem cor-
responder a órbitas conectantes juntando h(j)k e h(i)
k−1. Isto é possível já que cada entrada é
o número de intersecções das esferas instável e estável contadas com orientação. Nosso mé-
todo permite determinar, neste contexto, caminhos minimais na ausência de entradas nulas
correspondentes a órbitas conectantes.
Seja F (γi,j) e R(γi,j) o conjunto de todos os caminhos elementares que correspondem a

105
linhas de �uxo de ϕt e −ϕt respectivamente e que fazem parte de γi,j. De�namos
`+(γi,j) =∑
γ∈F (γi,j)
`(γ) and `−(γi,j) =∑
γ∈R(γi,j)
`(γ)
É claro que `(γi,j) = `+(γi,j) + `−(γi,j) e `+(γi,j)− `−(γi,j) = j − i.
Na presença de vários caminhos entre h(j)k e h(i)
k−1 escolhemos aquele cujo `−(γi,j) é mini-
mal. De�nimos Lij como o conjunto de todos os caminhos entre h(j)k e h(i)
k−1. Notemos que
um caminho γi,j ∈ Lij tem comprimento mínimo se e somente se `−(γi,j) é minimal. De fato,
γi,j tem comprimento mínimo em Lij, ou seja, `(γi,j) < `(θij)∀ θij ∈ Lij se e somente se
`+(γi,j) + `−(γi,j) < `+(θij) + `−(θij)∀ θij ∈ Lij (6.1)
Substituindo `+(γi,j)) = `−(γi,j)) + j − i e `+(θij) = `−(θij) + j − i em (6.1) obtemos
`−(γi,j) < `−(θij)∀ θij ∈ Lij. Com isso, encontramos um caminho de comprimento minimal
para o caso em que não existem órbitas correspondentes as entradas nulas da matriz. No
entanto, mesmo neste caso particular, o minimal não é único. Além disso, permanece em
aberto o caso mais geral em que permitimos entradas nulas da matriz correspondendo a
conexões.
Ainda associado ao estudo da diferencial da seqüência espectral surge a questão dos
cancelamentos algébricos da seqüência e suas implicações dinâmicas.
Sejam hk ∈ Fs e hk−1 ∈ Fs−`, com p > s e r > `, tais que existem órbitas conectantes
entre hk e hk−1, hk e hk−1, e hk e hk−1. Além disso, suponha que não existem singularidades
entre hk e hk−1. Ver Figura 6.4.
Um caso particular interessante ocorre quando a aplicação d`s é um isomor�smo e cor-
responde a uma entrada ±1 que é um pivô primário (ou um pivô mudança de base) na
matriz ∆`. Como estas aplicações são isomor�smos, então implicam em cancelamentos al-
gébricos na seqüência espectral. Por outro lado, estas aplicações também correspondem a
cancelamentos dinâmicos de singularidades de índice consecutivo, como por exemplo hk e
hk−1 em ϕ. Pelo Teorema de Reineck (ver [R3] e [S1]) existe uma continuação do �uxo ϕ
para ϕ que corresponde ao cancelamento dinâmico, que por sua vez está associado a um

106
hk−1
hk
hk−1
hk
±1
hk−1
hk
ϕ ϕ
Figura 6.4: Fluxo perturbado ϕ depois do cancelamento.
cancelamento algébrico correspondente ao pivô primário ∆`s−`+1,s+1 = ∆s−`+1,s+1 na `-ésima
diagonal auxiliar de ∆`.
Nossa escolha de caminho em ϕ admite andar no �uxo reverso ao longo da órbita que
cancelará hk e hk−1 criando uma nova órbita mais longa conectando hk e hk−1 no �uxo
perturbado ϕ. Portanto, a órbita conectando hk e hk−1 pode ser vista como uma ponte
responsável pela criação de uma órbita conectando hk e hk−1 em ϕ. Como a órbita conec-
tando hk e hk−1 deixa de existir em ϕ, isto justi�ca o porque permitimos a esta órbita ser
percorrida no sentido reverso quando construímos o caminho conectando hk e hk−1 no �uxo
ϕ. Neste caso particular o caminho em ϕ indica o nascimento de uma órbita em ϕ.
Por outro lado, órbitas conectantes do �uxo ϕ` que correspondem a uma d` não nula
estão associadas a caminhos de órbitas conectantes em ϕ pelo Teorema 5.0.16 Zig-Zag. Pelos
mesmos argumentos acima, as órbitas conectantes em ϕ` associadas a um isomor�smo d`s que
corresponde a um pivô primário ±1 na matriz são cancelamentos algébricos na seqüência
espectral. Logo, também correspondem a um cancelamento dinâmico de singularidades de
índice consecutivo em ϕ`. Pelo Teorema de Reineck existe uma continuação do �uxo ϕ` a
ϕ` que corresponde a um cancelamento dinâmico associado ao pivô primário ∆`s−`+1,s+1 na
`-ésima diagonal auxiliar de ∆`. Mais uma vez, isto justi�ca o porque permitimos esta órbita
em ϕ` que corresponde a um caminho em ϕ ser percorrido no sentido reverso.
Inspirados neste caso particular onde a álgebra tem seu correspondente dinâmico, vamos

107
considerar caminhos mais gerais em ∆r onde percorrer no sentido reverso será permitido ao
longo de órbitas correspondentes a pivôs primários e pivôs mudança de base que não sejam
necessariamente iguais a ±1. A motivação para isto é que pelo Teorema 5.0.16 certos pivôs
mudança de base correspondem a diferenciais não nulas na seqüência espectral.
Embora neste caso não esteja claro qual a contrapartida dinâmica para o comportamento
algébrico, o Teorema 5.0.16 indica correspondência entre pivôs em ∆` (que podem indicar
órbitas no �uxo ϕ` associado a diferenciais não nulas d` da seqüência espectral) e caminhos
no �uxo ϕ.
Uma extensão natural deste trabalho é continuar generalizando o método da varredura
e os Teoremas 3.0.6, 4.0.14 e 5.0.16 para uma matriz de conexão associada a uma decom-
posição de Morse mais geral. Além disso, queremos explorar mais resultados associados as
diferenciais nesta situação mais geral.
Seria interessante considerar outros coe�cientes no cálculo da seqüência espectral, como
corpos ou anéis e veri�car a signi�cância dos resultados obtidos. Por exemplo, para estudar
espaços moduli de dimensão maior podemos considerar seqüências espectrais com coe�cientes
no espaço dos laços ([BaC]). Mais precisamente, se ϕ é um �uxo induzido por −∇f , onde
f é uma função de Morse, consideremos x e y pontos críticos e a tal que f(y) < a < f(x).
Sejam
Su(x) = W u(x) ∩ f−1(a) Ss(y) = W s(y) ∩ f−1(a)
Se não existem linhas de �uxo quebradas entre y e x então podemos supor que são os
únicos pontos críticos em f−1([f(y), f(x)]). Neste caso, se ind(x) = k e ind(y) = ` então
Su(x) ≈ Sk−1 e Ss(y) ≈ Sn−`−1. Pela condição de Morse-Smale Su(x) e Ss(y) se interceptam
transversalmente. A intersecção de Su(x) e Ss(y), denotada por Z(x, y) é a variedade de
conexão de x e y, também conhecida como espaço moduli das linhas de �uxo conectando x
a y. No caso de não haver órbitas quebradas Z(x, y) é compacto. Neste caso
dim f−1(a) = dimSu(x) + dimSs(y)− dimZ(x, y)
ou seja , dimZ(x, y) = k − ` − 1. Em nosso trabalho, como consideramos pontos críticos
com índices consecutivos então Z(x, y) tem dimensão zero. Para estudar espaços moduli

108
com dimensões maiores Cornea considera coe�cientes no espaço dos laços em M . Além
disso, no caso em que existem órbitas quebradas, Cornea trabalha com a compacti�cação de
Z(x, y). Para mais detalhes sobre esse estudo, ver [BaC] e [C2]. Usando tais ferramentas em
nosso contexto, seria possível detectar um número muito maior de conexões e assim obter
resultados mais re�nados.
Um outro exemplo interessante com outros coe�cientes é o estudo da matriz de conexão
sobre Z2 e a seqüência espectral associada. Nos trabalhos [BMdR1], [BMdR2], [BMdR3],
[BdRV], [BdRMaV], [BdRMa] e [CdRM] muitos resultados são obtidos através de técnicas
homológicas e homotópicas registradas em grafos de Lyapunov. São caracterizadas propri-
edades necessárias e su�cientes de um grafo para que este esteja associado a um �uxo do
tipo gradiente. Em particular, as restrições na topologia das fronteiras dos blocos isolantes
que contém as componentes do conjunto recorrente por cadeias, e as variações ao passar por
estas componentes são registradas no grafo. Quando o conjunto recorrente possui somente
singularidades, as seqüências homológicas sobre Z2 classi�cam as mesmas em desconectantes
e conectantes, hdj e hc
j. Além disso, informações relativas aos blocos isolantes, bem como a
forma com que estes compõem a variedadeM , estão registradas nos grafos e dependem dessa
classi�cação. Do nosso trabalho surge então uma possibilidade de entender as matrizes de
conexão sobre Z2 e as seqüências espectrais associadas. Isto implicaria no entendimento das
conexões dos grafos de Lyapunov rotulados com c e d. Ainda, podemos considerar enriquecer
hdk−1
hdk
βk−1 βk
βk−1 + 1 βk + 1
βk−1 + 1 βk
Figura 6.5: Conexão não permitida.
o grafo de Lyapunov rotulado com c e d com novas conexões. Quais conexões são permitidas

109
nestes grafos? É fácil veri�car que o grafo na Figura 6.5 não seria permitido, pois contraria
o Teorema do Cancelamento de Smale ([R3] e [S2]).

Referências Bibliográ�cas
[BaC] J. F. Barraud and O. Cornea. Lagrangian intersections and the Serre spectral
sequence. Annals of Mathematics. 166 (2007), 657-722.
[BMdR1] M. A. Bertolim, M. P. Mello and K. A. de Rezende Lyapunov graph continu-
ation, Ergodic Theory and Dynamical Systems. 23 (2003), 1-58.
[BMdR2] M. A. Bertolim, M. P. Mello and K. A. de Rezende Poincaré - Hopf Inequalities,
Trans. of the Amer. Math. Soc. 357 (2005), 4091-4129.
[BMdR3] M. A. Bertolim, M. P. Mello and K. A. de Rezende Poincaré-Hopf Inequalities
and Morse Inequalities for Lyapunov graphs, Ergodic Theory and Dynamical
Systems. 25 (2005), 1-39.
[BdRV] M. A. Bertolim, K. A. de Rezende and G. M. Vago Minimal Morse �ows on
Compact Manifolds, Topology and its Application. 153 (2006), 3450-3466.
[BdRMaV] M. A. Bertolim, O. Manzoli Neto, K. A. de Rezende, G. M. Vago Isolating
Blocks for Morse-Smale Flows, Geometriae Dedicata. 121 (2006), 19-41.
[BdRMa] M. A. Bertolim, O. Manzoli Neto, K. A. de Rezende Isolating Blocks for
Periodic Orbits, Journal of Dynamical and Control Systems. 13 (2007), 121-
134.
[B] G. E. Bredon. Topology and Geometry. Graduate Texts in Mathematics, 139.
Springer-Verlag, New York-Berlin, 1993.
110

111
[Co] C. Conley. Isolated invariant sets and the Morse index. CBMS Regional Confe-
rence Series in Mathematics, 38. American Mathematical Society, Providence,
R.I., 1978.
[C1] O. Cornea. Homotopical dynamics: suspension and duality. Ergodic Theory
and Dynamical Systems. 20 (2000), 379-391.
[C2] O. Cornea. Homotopical dynamics II: Hopf invariants, smoothing and the
Morse complex. Ann. Scient. Éc. Norm. Sup. 4e série. 35 (2002), 549-573.
[C3] O. Cornea. Homotopical Dynamics IV: Hopf invariants and Hamiltonian �ows.
Communications on Pure and Applied Math. 55 (2002), 1033-1088.
[CdRM] R. N. Cruz, K. A. de Rezende and M. Mello Realizability of the Morse polytope,
Qualitative Theory of Dynamical Systems. 6 (2007), 59-86.
[D] J. F. Davis and P. Kirk. Lecture Notes in Algebraic Topology. Graduated
Studies in Math, 35. American Mathematical Society, Providence, R.I., 2001.
[F1] J. Franks. Morse-Smale �ows and homotopy theory. Topology. 18 (1979),
199-215.
[F2] J. Franks. Homology and dynamical systems. CBMS Regional Conference Series
in Mathematics, 49, Providence, R.I., 1982.
[Fr1] R. Franzosa. Index �ltrations and the homology index braid for partially or-
dered Morse decompositions. Trans. of the Amer. Math. Soc. 298 (1986),
193�213.
[Fr2] R. Franzosa. The continuation theory for Morse decompositions and connection
matrices. Trans. of the Amer. Math. Soc. 310 (1988), 781�803.
[Fr3] R. Franzosa. The connection matrix theory for Morse decompositions. Trans.
of the Amer. Math. Soc. 311 (1989) 561-592.

112
[Fr4] R. Franzosa, K. Mischaikow. Algebraic transition matrices in the Conley index
theory. Trans. of the Amer. Math. Soc. 350 (1998), 889�912.
[K] H. L. Kurland. Homotopy invariants of repeller-attractor pairs I: The Puppe
sequence of an R-A pair. J. Di�erential Equations. 46 (1982), 1�31
[L] R. Leclercq. Spectral invariants in Lagrangian Floer theory. ar-
Xiv:math/0612325, 2006.
[MC] C. McCord. The connection map for atractor-repeller pairs. Trans. of the
Amer. Math. Soc. 307 (1988), 195-203.
[MCR] C. McCord, J. F. Reineck. Connection matrices and transition matrices. Conley
index theory, Banach Center Publ. 47 (1999), 41�55.
[M1] J. W. Milnor. Topology from the di�erentiable viewpoint. The University Press
of Virginia, 1965.
[M2] J. W. Milnor. Lectures on the h-cobordism theorem. Princeton University Press,
Princeton, N.J., 1965.
[Mo] R. Moeckel. Morse decompositions and connection matrices. Ergodic Theory
and Dynamical Systems. 8 (1988), 227-249.
[R1] J. F. Reineck. The connection matrix in Morse-Smale �ows. Trans. of the
Amer. Math. Soc. 322 (1990), 523-545.
[R2] J. F. Reineck. The connection matrix in Morse-Smale �ows II. Trans. of the
Amer. Math. Soc. 347 (1995), 2097-2110.
[R3] J. F. Reineck. Continuation to the minimal number of critical points in gradient
�ows. Duke Math. Journal 68 (1992), 185�194.
[Sa1] D. Salamon. Connected simple systems and the Conley index of invariants sets.
Trans. of the Amer. Math. Soc. 291 (1985), 1�41.

113
[Sa2] D. Salamon. Morse Theory, Conley index and Floer homology. Bull. London
Math. Soc. 22 (1990), 113-140.
[S1] S. Smale. The generalized Poincaré conjecture in higher dimensions. Bull.
Amer. Math. Soc. 66 (1960), 373�375.
[S2] S. Smale. On the structure of manifolds. Amer. J. Math. 84 (1962), 387�399.
[Sp] E. Spanier. Algebraic Topology. McGraw-Hill Book Co., New York, 1966.
![Introdução aos Sistemas Embarcados Sergio Cavalcante svc@cin.ufpe.br: Usem assunto com [ese] svc/ese 3425.4714 8835.0950](https://img.document.onl/doc/110x75/570638661a28abb8239029ef/introducao-aos-sistemas-embarcados-sergio-cavalcante-svccinufpebr-usem.jpg)