Embed Size (px)
Citation preview

U N I V E R S I D A D E F E D E R A L D E G O I Á S E S C O L A D E E N G E N H A R I A E L É T R I C A
PROGRAMA DE PÓS GRADUAÇÃO DE ENGENHARIA ELÉTRICA E DE COMPUTAÇÃO
Método Alternativo de Controle Vetorial Usando Processador Digital de Sinais
Asley Stecca Steindorff
Orientador: Prof. Dr. José Wilson Lima Nerys
Goiânia, 21 de Fevereiro de 2003

ASLEY STECCA STEINDORFF
MÉTODO ALTERNATIVO DE CONTROLE VETORIAL USANDO PROCESSADOR DIGITAL DE
SINAIS
Dissertação apresentada ao Curso de Mestrado em Engenharia Elétrica e de Computação da Escola de Engenharia Eletrica da Universidade Federal de Goiás, como parte dos requisitos para obtenção do título de Mestre em Engenharia Elétrica Área de Concentração: Engenharia Elétrica Linha de Pesquisa: Automação de Processos
BANCA EXAMINADORA: José Wilson Lima Nerys, PhD (UFG) – Orientador Darizon Alves de Andrade, PhD (UFU) Enes Gonçalves Marra, Dr. (UFG)

Dados Internacionais de Catalogação-na-Publicação (CIP)
(GPT/BC/UFG)
Steindorff, Asley Stecca S821m Método alternativo de controle vetorial usando processador digital de sinais / Asley Stecca Steindorff. - Goiânia, 2003. 90 f. : il., grafs. Dissertação (Mestrado) – Universidade Federal Goiás, Escola de Engenharia Elétrica, 2003. Bibliografia: f. 75-76 Inclui anexos 1. Processador digital de sinais 2. Motores elétri- cos de indução 3. Controle vetorial (Engenharia) I. Universidade Federal de Goiás. Escola de Engenharia Elétrica II. Título. CDU: 004.383.3:621.313.333
1
SUMÁRIO
SUMÁRIO............................................................................................................................ 1
LISTA DE FIGURAS.......................................................................................................... 3
LISTA DE TABELAS......................................................................................................... 5
LISTA DE ABREVIATURAS............................................................................................ 6
AGRADECIMENTOS ........................................................................................................ 8
ABSTRACT ......................................................................................................................... 9
RESUMO............................................................................................................................ 10
CAPÍTULO 1 INTRODUÇÃO ........................................................................................ 11
CAPÍTULO 2 CONTROLE VETORIAL TRADICIONAL......................................... 14 2.1 PRINCÍPIOS DE CONTROLE VETORIAL ................................................................... 14
2.1.1 A Máquina CC............................................................................................. 14 2.1.2 Desacoplamento de Fluxos na Máquina de Indução .................................. 16
2.2 MODELO DINÂMICO DA MÁQUINA DE INDUÇÃO .................................................. 19 2.2.1 Referência no Fluxo de Rotor...................................................................... 20 2.2.2 Referência no Fluxo de Estator ................................................................... 21 2.2.3 Referência no Fluxo de Entreferro.............................................................. 21 2.2.4 Modelo em Fluxo Arbitrário........................................................................ 22 2.2.5 Desacoplamento dos Modelos em Fluxo..................................................... 23
2.3 O CONTROLE VETORIAL INDIRETO....................................................................... 24 2.3.1 Orientação no Fluxo de Rotor..................................................................... 25 2.3.2 Orientação no Fluxo de Estator .................................................................. 27 2.3.3 Orientação no Fluxo de Entreferro ............................................................. 28 2.3.4 Controlador Universal Indireto .................................................................. 30
2.4 O CONTROLE VETORIAL DIRETO.......................................................................... 31 2.4.1 Orientação no Fluxo de Rotor..................................................................... 32 2.4.2 Orientação no Fluxo de Estator .................................................................. 33 2.4.3 Orientação no Fluxo de Entreferro ............................................................. 34 2.4.4 Controlador Universal Direto..................................................................... 35
2.5 CONCLUSÃO ......................................................................................................... 35
CAPÍTULO 3 CONTROLE VETORIAL ALTERNATIVO ........................................ 36
3.1 BOBINAS ACOPLADAS .......................................................................................... 36 3.2 TRIÂNGULO DE FLUXO DE ROTOR ........................................................................ 39 3.3 CONDIÇÕES PARA OBTENÇÃO DE TRANSIÇÃO RÁPIDA DE CONJUGADO ............... 40 3.4 FORMA HÍBRIDA (ANALÓGICA E DIGITAL) DO CONTROLE VETORIAL ALTERNATIVO .................................................................................................................. 42 3.5 CONCLUSÃO ......................................................................................................... 44
CAPÍTULO 4 DIGITALIZAÇÃO DO CONTROLE VETORIAL ALTERNATIVO............................................................................................................................................. 45
2
4.1 ORGANIZAÇÃO DO ALGORITMO............................................................................ 45 4.2 CONDICIONAMENTO E AQUISIÇÃO DE DADOS ...................................................... 47 4.3 PROCESSAMENTO DE AMPLITUDE, FREQÜÊNCIA E FASE ...................................... 48
4.3.1 Declaração das constantes da máquina...................................................... 49 4.3.2 Determinação da Constante de Tempo do Rotor (τr).................................. 50 4.3.3 Discriminação dos Blocos de Controle ....................................................... 51
4.4 GERAÇÃO DO SINAL DE REFERÊNCIA DE CORRENTE ............................................ 54 4.5 CONTROLADOR DE CORRENTE.............................................................................. 55 4.6 GERAÇÃO DE SINAL PWM ................................................................................... 56 4.7 DRIVER DE ACIONAMENTO DO INVERSOR ............................................................. 56 4.8 CONVERSOR PWM ............................................................................................... 57 4.9 TEMPO TOTAL DE PROCESSAMENTO..................................................................... 58 4.10 CONCLUSÃO ......................................................................................................... 59
CAPÍTULO 5 RESULTADOS DE SIMULAÇÃO E EXPERIMENTAIS .................. 60 5.1 ACELERAÇÃO E DESACELERAÇÃO DA MÁQUINA.................................................. 60 5.2 RESULTADOS COM INVERSÃO DE VELOCIDADE .................................................... 65 5.3 OPERAÇÃO DESSINTONIZADA............................................................................... 69 5.4 RESULTADOS PARA OPERAÇÃO SEM ORIENTAÇÃO DE FLUXO (CONTROLE ESCALAR)......................................................................................................................... 71 5.5 CONCLUSÃO ......................................................................................................... 72
CAPÍTULO 6 CONCLUSÃO GERAL ........................................................................... 73
REFERÊNCIAS BIBLIOGRÁFICAS: ........................................................................... 75
ANEXO A........................................................................................................................... 77
ANEXO B ........................................................................................................................... 78
ANEXO C........................................................................................................................... 83

3
LISTA DE FIGURAS Figura 2.1 - Orientação da fmm de Armadura e Campo ..................................................... 14
Figura 2.2 – Caminhos magnéticos na máquina de corrente contínua ................................ 16
Figura 2.3 - Disposição do vetor de fluxo de rotor.............................................................. 17
Figura 2.4 - Disposição do vetor de fluxo do rotor orientado com eixo 'd' ......................... 18
Figura 2.5 - Estrutura básica do controle vetorial indireto .................................................. 25
Figura 2.6 - Controlador vetorial indireto para orientação no fluxo de rotor...................... 26
Figura 2.7 – Controlador vetorial indireto com orientação no fluxo de estator .................. 27
Figura 2.8 – Controlador vetorial indireto com orientação no fluxo de entreferro ............ 29
Figura 2.9 – Controlador universal indireto ........................................................................ 30
Figura 2.10 – Estrutura do acionamento vetorial direto ...................................................... 32
Figura 2.11 – Controlador vetorial direto para orientação fluxo de rotor ........................... 33
Figura 2.12 – Controlador vetorial direto com circuito desacoplador................................. 34
Figura 3.1 – Bobinas acopladas com secundário curto-circuitado ...................................... 36
Figura 3.2 – Variação em degrau da corrente do primário, (b) corrente no secundário, (c) fluxo no secundário ..................................................................................................... 38
Figura 3.3 – Triângulo do Fluxo concatenado de rotor para duas condições de carga ....... 39
Figura 3.4 – Sistema de Controle Vetorial Alternativo Híbrido.......................................... 42
Figura 3.5 – Bloco de EPROMs para a geração das correntes de referência ...................... 43
Figura 3.6 – Leitura da EPROM na transição de uma situação de regime permanente para outra............................................................................................................................. 43
Figura 3.7 – Bloco gerador de PWM e controlador de corrente.......................................... 44
Figura 4.1 - Estrutura do Algoritmo implementado ............................................................ 46
Figura 4.2 - Representação para números em formato 1.15................................................ 47
Figura 4.3 – Sistema para Medição da Constante de Tempo do Rotor (τr)......................... 50
Figura 4.4 - Fluxograma do cálculo da raiz quadrada ......................................................... 52
Figura 4.5 – Fluxograma do Cálculo da Fase...................................................................... 52
Figura 4.6 - Fluxograma do Cálculo da Freqüência de Escorregamento ............................ 53
Figura 4.7 - Fluxograma do cálculo da velocidade síncrona............................................... 53
Figura 4.8 - Fluxograma para cálculo das correntes de referência...................................... 55
Figura 4.9 - Fluxograma do Controlador de Corrente ......................................................... 56
Figura 4.10 – Sistema de Controle Vetorial Alternativo Digitalizado ................................ 57

4
Figura 4.11 – Tempo de Processamento do Sistema. Traço Superior: Pulso do PWMSYNC. Traço Inferior: Pulso Mostrando o Tempo de Processamento.............. 58
Figura 5.1 – Variação de Velocidade de 0 a 600 rpm. Traço Superior: (a) e (b) Referência
de Velocidade. Traço Central: (a) e (b) Velocidade Real da Máquina. Traço Inferior: (a) Corrente do Estator (Ia), (b) Corrente iqs ............................................................... 61
Figura 5.2 - Variação de Velocidade de 600rpm a 0rpm. Traço Superior: (a) e (b) Referência de Velocidade. Traço Central: (a) e (b) Velocidade Real da Máquina. Traço Inferior: (a)Corrente de Estator (Ia) e (b) Corrente iqs ...................................... 61
Figura 5.3 - Variação de Velocidade de 0 rpm a 600 rpm no Sistema Simulado. (a) Referência de Velocidade. (b) Velocidade Real da Máquina. (c)Corrente de Estator (ias). (d) Corrente iqs ..................................................................................................... 62
Figura 5.4 - Variação de Velocidade de 600 rpm a 0 rpm no Sistema Simulado. (a) Referência de Velocidade. (b) Velocidade Real da Máquina. (c)Corrente de Estator (ias). (d) Corrente iqs ..................................................................................................... 63
Figura 5.5 -Variação de Velocidade de 0 rpm a 300 rpm. Traço Superior: (a) e (b) Referência de Velocidade. Traço Central: (a) e (b) Velocidade Real da Máquina. Traço Inferior: (a)Corrente de Estator (Ia) (b) Corrente iqs......................................... 64
Figura 5.6 - Variação de Velocidade de 300 rpm a 0 rpm. Traço Superior: (a) e (b) Referência de Velocidade. Traço Central: (a) e (b) Velocidade Real da Máquina. Traço Inferior: (a)Corrente de Estator (Ia) e (b) Corrente iqs ...................................... 64
Figura 5.7 – Variação de Velocidade de -600rpm a 600rpm com Referência Quadrada. Traço Superior: Referência de Velocidade. Traço Central: Velocidade Real da Máquina. Traço Inferior: Corrente de Estator ............................................................. 66
Figura 5.8 - Variação de Velocidade de -600rpm a 600rpm com Referência Quadrada. Traço Superior: Referência de Velocidade. Traço Central: Velocidade Real da Máquina. Traço Inferior: Corrente iqs.......................................................................... 66
Figura 5.9 - Variação de Velocidade de –600rpm a 600rpm no Sistema Simulado. (a) Referência de Velocidade. (b) Velocidade Real da Máquina. (c)Corrente de Estator (ias). (d) Corrente iqs ..................................................................................................... 67
Figura 5.10 – Variação de Velocidade de -600rpm a 600rpm com Referência Triangular. Traço Superior: Referência de Velocidade. Traço Central: Velocidade Real da Máquina. Traço Inferior: Corrente de Estator ............................................................. 67
Figura 5.11 - Variação de Velocidade de -600rpm a 600rpm com Referência Senoidal. Traço Superior: Referência de Velocidade. Traço Central: Velocidade Real da Máquina. Traço Inferior: Corrente de Estator ............................................................. 68
Figura 5.12 – Resultado Simulado de Variação de Velocidade de –600 a 600 rpm seguindo uma referência (a) triangular e (b) senoidal ................................................................ 68
Figura 5.13 – Variação de Velocidade de –600rpm a 600rpm com Referência Quadrada e constante de tempo (τr) 120% do valor real (156ms).................................................. 69
Figura 5.14 – Variação de Velocidade de –600rpm a 600rpm com Referência Quadrada e constante de tempo (τr) 140% do valor real (182ms).................................................. 69
5
Figura 5.15 – Variação de Velocidade de –600rpm a 600rpm com Referência Quadrada e constante de tempo (τr) 80% do valor real (104ms).................................................... 70
Figura 5.16 – Variação de Velocidade de –600rpm a 600rpm com Referência Quadrada e constante de tempo (τr) 60% do valor real (78ms)...................................................... 70
Figura 5.17 – Variação de Velocidade de –600rpm a 600rpm com Referência Triangular sem Orientação de Fluxo (Controle Escalar)............................................................... 72
Figura 5.18 - Variação de Velocidade de 600rpm a 0rpm e de 0 a 600rpm sem Orientação de Fluxo (Controle Escalar)......................................................................................... 72
LISTA DE TABELAS Tabela 1- Valores da relação de espiras para os fluxos da máquina ................................... 22

6
LISTA DE ABREVIATURAS CC Corrente Contínua
CA Corrente Alternada
Ia Corrente de Armadura
If Corrente de Campo
fmm Força Magneto Motriz
ωr Velocidade angular do rotor
ωs Velocidade angular síncrona
ωsl Velocidade angular de escorregamento
E Tensão Induzida
k Constante de Proporcionalidade
Φ Fluxo Concatenado
Te Conjugado Eletromagnético
iqs Componente da corrente de estator no eixo de quadratura
ids Componente da corrente de estator no eixo direto
is Corrente de Estator
iqr Componente da corrente de rotor no eixo de quadratura
idr Componente da corrente de rotor no eixo direto
ir Corrente de Rotor
Ψdr Componente do Fluxo de Rotor no eixo direto
Ψqr Componente do Fluxo de Rotor no eixo de quadratura
Ψr Fluxo de Rotor
Ψds Componente do Fluxo de Estator no eixo direto
Ψqs Componente do Fluxo de Estator no eixo de quadratura
Ψs Fluxo de Estator
Ψr Fluxo de Rotor
ξ ângulo de defasagem da corrente de estator e fluxo de rotor.
Lm Indutância de Magnetização do Motor
Ls Indutância própria de Estator
Lr Indutância própria de Rotor
Lls Indutância Mútua de Estator
7
Llr Indutância Mútua de Rotor
d Eixo Direto
q Eixo de Quadratura
vds Tensão de Eixo Direto no Estator
vdr Tensão de Eixo Direto no Rotor
vqr Tensão de Eixo de Quadratura no Rotor
vqs Tensão de Eixo de Quadratura no Estator
Rs Resistência de Estator
P Número de pólos do motor
τr Constante de Tempo do Rotor
τrl Constante de Tempo de Dispersão
σ Fator de Dispersão
σa Fator de Dispersão Arbitrário
a Relação de Espiras
M Indutância de magnetização
PWM Modulação por Largura de Pulso
DSP Processador Digital de Sinais

8
AGRADECIMENTOS
Agradeço a todos que de uma maneira ou outra contribuiram para o sucesso
deste trabalho, em especial:
Ao meu orientador José Wilson pela paciência e bom humor em suas
orientações durante o trabalho.
Minha família, em especial minha mãe, pela paciência, apoio e conselhos
sábios nas maiores dificuldades.
A minha namorada Fernanda, pela paciência e tranqüilidade.
A equipe médica da Unidade de Transplante do Hospital Araújo Jorge que me
acompanhou durante o Transplante de Medula Óssea, ao qual fui submetido durante a
execução deste trabalho.
Aos professores do Grupo PEQ pelo apoio e orientação durante o trabalho.
Aos colegas do curso de mestrado, pelo apoio e discussões durante a
execução dos trabalhos, principalmente dos amigos Antônio Marcos e Wanir.
À Fundação de Apoio à Pesquisa (FUNAPE) e Coordenação de Apoio à
Pesquisa (CAPES) pelo apoio financeiro.

9
ABSTRACT
This work presents a digital implementation of a vector control system for
induction motors that is called of alternative system because it does not make use of matrix
transformations from a 3-phase to a 2-phase reference system (Clark and Park
transformations), which are necessary for the standard vector control methods.
An overview of some vector control methods is presented for comparison with the
alternative system, concerning the mathematical development, since the alternative method
basically consists in obtaining the three main variables for the vector control system:
magnitude, frequency and phase of the stator current vector from the flux and torque
components of the stator current, and without need of the absolute position of the rotor flux
vector.
A hybrid implementation of the alternative vector control system, which contains
analog and digital parts, is presented as a model for the digital implementation.
The Digital Signal Processor (DSP) ADMC 401 by Analog Devices is used here for
the digital implementation. It replaces the control and the PWM generating blocks of the
hybrid system. The implemented algorithm is shown in details in the appropriate section.
Some experimental results are presented for the implemented system including
results for starting, stopping and direction reversing tests, with different signals for the
reference speed.
Some experimental results from a comercial vector control system are also
presented for comparison with the alternative vector control system.

10
RESUMO
Este trabalho apresenta uma implementação totalmente digitalizada de um
sistema de controle vetorial denominado de alternativo, pois não necessita da utilização das
matrizes de transformação do sistema de 3 eixos para 2 eixos (transformadas de Clark e
Park), necessárias aos métodos tradicionais de controle vetorial.
Um estudo dos vários sistemas de controle vetorial é apresentado para uma
comparação da simplicidade matemática do sistema alternativo, visto que o mesmo
consiste basicamente do cálculo direto das três grandezas fundamentais para o controle
vetorial: amplitude, freqüência e fase do vetor corrente de estator, a partir das componentes
de fluxo e conjugado da corrente de estator, e sem a necessidade da posição absoluta do
vetor de fluxo de rotor.
Um sistema de controle vetorial alternativo híbrido, que utiliza partes
analógicas e digitais na implementação, é apresentado como modelo para a implementação
totalmente digitalizada.
Para a digitalização foi utilizado o Processador Digital de Sinais ADMC401
da Analog Devices, que substituiu toda a parte de controle do sistema híbrido, gerando os
sinais PWM para o conversor de potência. O algoritmo implementado é apresentado
detalhadamente em todos os seus blocos.
São apresentados alguns resultados experimentais do sistema implementado,
tais como resultados de partida, parada e inversão no sentido de rotação, com vários sinais
de referência de velocidade.

11
CAPÍTULO 1
INTRODUÇÃO
Desde o advento da revolução industrial no final do século 19, o homem tem a
necessidade do uso das máquinas, inicialmente a vapor e controladas por peças mecânicas
ou mesmo por pessoas. Com o início da produção em série no início do século 20 com o
aumento da utilização da eletricidade e a produção cada vez maior para satisfazer os
mercados, percebeu-se a necessidade de controle automático dos sistemas industriais.
Os motores CC tem dominado o campo dos acionamentos com variação de
velocidade de máquinas elétricas, onde os conversores rotativos são utilizados, nas mais
várias aplicações. Há 50 anos atrás, os conversores rotativos eram substituídos por
equipamentos estáticos, tubos de descarga cheios de gás (thyratrons), conversores de arco
de mercúrio ou amplificadores magnéticos, mas o motor CC permaneceu o padrão em
acionamento de motores. Sempre que o sistema necessitava de grandes variações de
velocidade, paradas, operação nos quatro quadrantes ou curvas de conjugado e velocidade
suaves.
As máquinas CC possuem várias características que limitam sua utilização, e a
principal delas é o comutador. Peça esta que limita a potência e velocidade das máquinas e
necessita de manutenção constante, produz faiscamento, não sendo possível sua utilização
em ambientes explosivos. Outra característica é o volume dos motores CC bastante
expressivos se comparado com uma máquina CA.
Desde o aparecimento do transistor em 1948 e do tiristor em 1957, ainda foi
necessário um longo período até que estes dispositivos pudessem suprir potência
suficiente, e ter um chaveamento rápido e eficiente. Mas mesmo tendo atingido um grau
razoável de eficiência, estando disponíveis a um baixo custo, ainda não era possível obter
variações de velocidade rápida e com conjugado constante.
Mas a máquina CC separadamente excitada, possui uma estrutura de controle
bastante simples baseada na ortogonalidade dos eixos associados ao fluxo de campo e a
força magnetomotriz de armadura. Devido às características construtivas, estes eixos
conjugado e fluxo estão desacoplados, facilitando projetos de acionamento com alto

12
desempenho dinâmico, através do controle da corrente de armadura. Na máquina CA, esta
ortogonalidade não existe diretamente tornando as interações dinâmicas bastante
complexas, ou seja, o fluxo e a fmm não são estacionários e movem-se com diferentes
velocidades, formando vários ângulos que dependem do estado dinâmico da máquina.
A partir disso vários esquemas de controle foram propostos baseados em
modelos de regime permanente da máquina, mas nenhum deles se compara ao desempenho
dinâmico da máquina CC. Até que Hasse em 1969 propôs uma nova metodologia baseada
em seu modelo vetorial, usando vetores espaciais para a modelagem da máquina AC, mas
somente em 1972, Blaschke [8] utilizando-se de conceitos matemáticos e muita intuição
conseguiu formular uma teoria geral sobre o comportamento dinâmico da máquina de
indução, mostrando como desacoplar esta planta de controle e aproximando o
comportamento dinâmico da máquina CA ao de uma máquina CC separadamente excitada.
Mesmo assim durante toda a década de 70, estas técnicas de controle vetorial
foram utilizadas somente como exercício acadêmico, pois a mesma necessita de um
complexo processamento de sinais, inviáveis economicamente no meio industrial da época
e de baixa qualidade quando utilizados métodos analógicos para sua solução.
No início da década de 80 quando os primeiros microcontroladores digitais
tornaram-se acessíveis, a implementação das complexas funções necessárias para o
controle foram implementadas, e as necessidades de hardware diminuídas, criou-se então
uma grande expectativa ao desenvolvimento destas técnicas, principalmente devido à
continuidade de desenvolvimento dos microcontroladores, e a partir disso somente a
criatividade e desenvolvimento técnico dos engenheiros tornava-se barreira para um
completo desenvolvimento das técnicas de acionamento de máquinas CA.
A maioria dos trabalhos de controle vetorial utiliza-se da posição absoluta do
vetor de fluxo de referência para utilização das técnicas de controle vetorial, e a
determinação desta posição absoluta torna-se o grande problema dos sistemas de controle
vetorial, chamados neste trabalho de “tradicionais”.
O início da solução deste problema foi feito por Andrade [2], [4], que faz uso
somente da posição relativa, entre a corrente de estator e o fluxo de rotor (usado como
referência), mas somente para dois pontos de operação fixos. E então Nerys [1], [3],
implementou esta mesma técnica para qualquer ponto de operação do motor. Esta técnica
utilizada por Andrade e Nerys é que são chamados de controle vetorial “alternativo”.

13
O objetivo deste trabalho é digitalizar a implementação efetuada por Nerys em
[1], utilizando para isso o processador digital de sinais (DSP) ADMC401 da Analog
Devices, e um conversor de 6 chaves.
No capítulo 2 são apresentados os princípios básicos de um sistema de
controle vetorial, os esquemas e diferenças básicas dos métodos direto e indireto, e um
apanhado das equações e esquemas para todos os eixos de referência que podem ser
utilizados [9].
O capítulo 3 apresenta os princípios básicos da técnica de controle vetorial
alternativo, as equações desenvolvidas por Andrade [2] e Nerys [1], e ainda a descrição do
sistema chamado híbrido, desenvolvido por Nerys em [1], que é o principal foco deste
trabalho.
O capítulo 4 mostra a digitalização do sistema de controle vetorial alternativo,
mostrando as características do hardware utilizado, o algoritmo implementado e as
principais dificuldades para determinação de alguns parâmetros do sistema digitalizado.
No capítulo 5 são mostrados os resultados experimentais e simulados obtidos
com o sistema digitalizado. São apresentados resultados de partida, parada e inversão de
velocidade. Foram obtidos ainda resultados seguindo sinais de referência triangular,
quadrada senoidal. Alguns resultados sem orientação de fluxo (controle escalar) foram
apresentados para uma comparação com o controle vetorial. Os resultados de simulação
foram obtidos num software desenvolvido em Matlab Simulink.
E no capítulo 6 são apresentadas as conclusões, discussões dos resultados
obtidos e sugestões para trabalhos futuros.
O Anexo A mostra os dados do motor e resultados de ensaios, no Anexo B um
artigo apresentado ao 6º Congresso Brasileiro de Eletrônica de Potência (COBEP), e no
Anexo C o código Assembly do sistema implementado.

14
CAPÍTULO 2
CONTROLE VETORIAL TRADICIONAL
2.1 PRINCÍPIOS DE CONTROLE VETORIAL
2.1.1 A MÁQUINA CC
Para conhecer as principais técnicas de controle vetorial para motor de
indução é necessária uma pequena revisão de como é realizado o controle do conjugado na
máquina de corrente contínua. Este paralelo é necessário, pois o controle vetorial é
bastante parecido com o controle da máquina de corrente contínua separadamente excitada.
A máquina CC consiste em um campo estacionário, produzido por uma
excitação fixa nas bobinas do estator ou com imãs permanentes, chamada de campo e uma
armadura rotativa, cujos enrolamentos são alimentados através do comutador e suas
escovas. A estrutura básica da máquina CC é mostrada na Figura 2.1. Estas duas
características mantém o fluxo e a fmm de armadura perpendiculares, fazendo com que
estas duas variáveis da máquina tornem-se independentes entre si, exceto por efeitos não
lineares.
ω
Conjugado
fmm de Armadura ( Ia )
Campo ( If )
Ia
Ia
. . .
. . .
. . .
+ +
+ +
+ + +
+ +
If
Figura 2.1 - Orientação da fmm de Armadura e Campo

15
Devido a estas duas características as equações básicas da máquina CC são:
rkE ω⋅Φ⋅= (2.1)
ae IkT ⋅Φ⋅= (2.2)
onde:
ωr :velocidade do rotor em rad/s
k : constante de proporcionalidade que depende da construção da máquina
Φ : Fluxo produzido pela corrente de campo concatenado com o dos
enrolamentos da armadura.
Assim, a variação de velocidade na máquina CC normalmente é obtida
mantendo-se o campo fixo e variando-se a tensão de armadura. Esta solução não produz
um controle total de velocidade, pois com variações na carga, a corrente varia modificando
a queda de tensão na resistência de armadura, aumentando ou diminuindo a velocidade
conforme a variação da carga. Assim, para um efetivo controle de velocidade e uma boa
resposta dinâmica da máquina o controle da corrente de armadura soluciona estes
problemas, como pode ser observado na equação (2.2), onde o conjugado é diretamente
proporcional a corrente de armadura (Ia).
Assim pode-se resumir nos itens abaixo as condições necessárias para que o
controle de conjugado apresente resposta rápida, que são:
1. um controle da corrente de armadura independente dos efeitos da
resistência dos enrolamentos da armadura, da indutância de dispersão e da
tensão induzida;
2. um controle independente do valor do campo;
3. um controle independente e espacialmente ortogonal entre o eixo do fluxo
e da fmm de armadura, evitando qualquer interação entre a fmm de
armadura e o fluxo.
Obedecendo a estas três condições em todos os instantes de tempo, obtém-se
uma resposta de conjugado rápida e diretamente proporcional à variação da corrente de

16
armadura. A rapidez ocorre devido à indutância dos enrolamentos de armadura ser bem
menor que a indutância dos enrolamentos de campo, devido a aspectos construtivos da
máquina CC, como pode ser visto na Figura 2.2. O caminho magnético do fluxo produzido
pela fmm de armadura tem um entreferro maior que o entreferro associado ao caminho
magnético do fluxo de campo. Conseqüentemente a indutância associada aos enrolamentos
de armadura é menor.
•
•
•
Br
ℑr
• •
ω
N S
Figura 2.2 – Caminhos magnéticos na máquina de corrente contínua
2.1.2 DESACOPLAMENTO DE FLUXOS NA MÁQUINA DE INDUÇÃO
O excelente desempenho dinâmico do motor de corrente contínua
separadamente excitado foi o ponto de partida para os métodos vetoriais aplicados aos
motores de indução. Esse excelente desempenho dinâmico deve-se ao desacoplamento
entre fluxo e fmm de armadura (responsável pelo conjugado). Portanto, para que o motor
de indução responda com o mesmo desempenho dinâmico do motor de corrente contínua é
essencial o desacoplamento entre a componente de fluxo e a componente de conjugado.
Como será visto posteriormente, esse desacoplamento já existe em regime permanente
entre o fluxo de rotor e a corrente de rotor, ambos originados da fmm de estator. O controle
vetorial consiste na imposição do vetor fmm de estator de tal modo que os vetores fluxo de
rotor e corrente de rotor permaneçam perpendiculares tanto em regime permanente quanto
em regime transitório.

17
Para o desacoplamento entre conjugado e fluxo o ponto inicial de análise deve
ser o modelo do motor de indução em um sistema dq fixo ao campo girante da máquina
(sistema de referência síncrono). Nesta situação as variáveis senoidais aparecem como
quantidades contínuas e as correntes de estator podem ser expressas pelas suas
componentes de eixo direto e de eixo em quadratura, como mostrado numa antecipação às
definições dos vetores espaciais, na Figura 2.3.
ir
idr
eixo estacionário
eixo síncrono
q
d
ξ
is
ids
iqs
ψdr
ψqr
ψr
iqr
Figura 2.3 - Disposição do vetor de fluxo de rotor
Neste modelo pode-se escrever a seguinte equação de conjugado para o motor
[15]:
( dsqrqsdrr
me ii
LLPT Ψ−Ψ−=
223 ) (2.3)
onde:
Ψdr : Componente do Fluxo de Rotor no eixo direto
Ψqr : Componente do Fluxo de Rotor no eixo de quadratura
idr : Componente do eixo direto da corrente de Rotor
iqr : Componente do eixo de quadratura da corrente de Rotor
Lm : Indutância de magnetização de entreferro
Lr : Indutância própria de rotor
P : Número de pólos do motor

18
A Figura 2.3 mostra as componentes de corrente de estator e fluxo de rotor
para uma situação genérica de operação, onde se pode ver claramente o acoplamento entre
conjugado e fluxo.
O problema do controle vetorial consiste em como desacoplar as correntes do
eixo de quadratura das correntes do eixo direto, ou seja, em como torná-las análogas às
correntes de campo e de armadura da máquina de corrente contínua.
eixo síncrono
ir
ψr = ψdr
ψqr = 0
eixo estacionário
q
d ξ
is
ids
iqs
ψr
Figura 2.4 - Disposição do vetor de fluxo do rotor orientado com eixo 'd'
A Figura 2.4 mostra como solução, o alinhamento do fluxo de rotor com o
eixo direto do sistema de referência síncrono, a qual é suficiente para simplificar a
expressão de conjugado dada na equação (2.3). Assim, alinha-se a componente ‘q’ da
corrente de estator com a corrente de rotor e a componente ‘d’ da corrente de estator com o
fluxo de rotor. Percebe-se ainda que a componente ‘q’ do fluxo de rotor é zero,
simplificando a expressão (2.3), como mostrado abaixo:
( ) qsdsqsdre iiKiPT ⋅⋅=Ψ−=22
3 (2.4)
A partir desta orientação, uma analogia com as equações da máquina CC pode
ser observada, onde as correntes ids e iqs podem ser comparadas às correntes If e Ia da
máquina de corrente contínua, obtendo assim o desacoplamento na máquina de indução, ou
seja, pode-se controlar o conjugado através de iqs, mantendo-se constante o fluxo através de
ids.

19
2.2 MODELO DINÂMICO DA MÁQUINA DE INDUÇÃO
Para implementação do controle vetorial, uma modelagem da máquina de
indução deve ser efetuada. Faz-se uso neste trabalho, do modelo d-q do motor de indução
no eixo de referência síncrono como deduzido em [15], e mostrado abaixo seus resultados.
As equações de tensão do circuito do estator:
dssqs
qssqs
qssds
dssds
dtd
iRv
dtd
iRv
ψωψ
ψωψ
++=
−+= (2.5)
As equações de tensão do circuito do rotor:
drslqr
qrrqr
qrsldr
drrdr
dtd
iRv
dtd
iRv
ψωψ
ψωψ
++=
−+= (2.6)
onde ωsl = ωs - ωr; e as equações de fluxo concatenados pelas bobinas de
estator e rotor apresentados nas expressões (2.5) e (2.6) são:
drmdssds iLiL +=ψ (2.7)
qrmqssqs iLiL +=ψ (2.8)
dsmdrrdrlrdgdr iLiLiL +=+=ψψ (2.9)
qsmqrrqrlrqgqr iLiLiL +=+=ψψ (2.10)
A equação do conjugado total produzido pela máquina (conjugado
eletromagnético):

20
( drqrqrdre iiPT ψψ −−=22
3 ) (2.11)
onde P é o número de pólos.
A equação mecânica do sistema é:
Lrr
e TP
Bdt
dP
JT +⋅+⋅=ω 22
ω (2.12)
onde TL é conjugado de carga do sistema.
A partir do modelo da máquina, precisa-se definir estruturas adequadas para a
alimentação em corrente (normalmente utilizadas em sistemas de controle vetorial), que
representem a dinâmica entre fluxo controlado e corrente de estator.
Pode-se utilizar como referência qualquer um dos fluxos da máquina – rotor,
estator ou mútuo – um modelo para cada fluxo de referência deve ser definido.
2.2.1 REFERÊNCIA NO FLUXO DE ROTOR
Para obter-se o modelo em fluxo com referência no fluxo de rotor, utiliza-se a
equação (2.6). Como a tensão nas barras do rotor do motor em gaiola é zero, vdr = vqr = 0, e
eliminando as correntes do rotor a partir das equações de fluxo (2.9) e (2.10), já que as
mesmas são inacessíveis como variáveis de controle, obtém-se o modelo para fluxo de
rotor mostrado em (2.12):
01001
1
1
=
−
−+
ds
qs
r
m
dr
qr
rsl
slr
dr
qr
iiL
dtd
τψψ
τω
ωτ
ψψ
(2.12)
onde r
rr R
L=τ é a constante de tempo do rotor.

21
2.2.2 REFERÊNCIA NO FLUXO DE ESTATOR
Para obter-se o modelo do motor de indução para referencial no fluxo de
estator é necessário substituir o fluxo de rotor pelo fluxo de estator na equação (2.6), para
isso substitui-se as equações (2.9) e (2.10), isolados idr e iqr em (2.7) e (2.8). Então
substitui-se os fluxos de rotor obtidos no modelo de rotor da equação (2.12), tem-se o
modelo para o fluxo de estator dado abaixo:
01
1
1
1
=
+−
+−
−+
ds
qs
rslr
slrr
r
s
ds
qs
rsl
slr
ds
qs
ii
dtd
dtd
Ldtd
τσωτσ
ωτστσ
τψψ
τω
ωτ
ψψ
(2.13)
onde sr
msr
LLLLL 2−
=σ é o fator de dispersão.
2.2.3 REFERÊNCIA NO FLUXO DE ENTREFERRO
Para o referencial no fluxo de entreferro procede-se da mesma forma, obtendo
o fluxo de rotor a partir da substituição da segunda parte de (2.9) e (2.10), isolados iqr e idr,
na primeira parte de (2.9) e (2.10). Substitui-se então os fluxos de rotor no modelo de fluxo
de rotor da equação (2.12) obtendo:
01
1
1
1
=
+−
+−
−+
ds
qs
rlslrl
slrlrl
r
m
dg
qg
rsl
slr
dg
qg
ii
dtd
dtd
Ldtd
τωτ
ωττ
τψψ
τω
ωτ
ψψ
(2.14)
onde r
lrrl R
L=τ .

22
2.2.4 MODELO EM FLUXO ARBITRÁRIO
Este modelo para a máquina de indução foi desenvolvido por De Donker e
Novonty em 1988 [5], com o objetivo de obter em um mesmo controlador o
desacoplamento entre conjugado e fluxo para qualquer um dos vetores de fluxo,
promovendo um alto grau de generalização nos modelos.
Para isso deve-se obter um modelo genérico da máquina de indução, que tenha
como referência um fluxo arbitrário. Essa generalização é obtida através das equações de
fluxo da máquina, inserindo uma constante ‘a’, chamada por ele de relação de espiras, que
multiplica diretamente o fluxo do rotor e modifica proporcionalmente todas as outras
grandezas do motor.
Assim de acordo com [5], o modelo em fluxo arbitrário é dado por:
01
1
1
1
=
+−
+−
−+
ds
qs
raslra
slrara
r
m
da
qa
rsl
slr
da
qa
ii
dtd
dtd
aLdtd
τσωτσ
ωτστσ
τψψ
τω
ωτ
ψψ
(2.15)
onde r
mra aL
LaL −=σ é o fator de dispersão arbitrário.
Para obter os modelos para cada um dos fluxos deve-se utilizar o valor
adequado da constante ‘a’ conforme mostra a. Tabela 1.
Tabela 1- Valores da relação de espiras para os fluxos da máquina
Relação de Espiras aψ Fluxo selecionado
r
m
LL
a = 'rψ Fluxo de rotor
1=a mψ Fluxo de entreferro
m
s
LL
a = sψ Fluxo de estator

23
2.2.5 DESACOPLAMENTO DOS MODELOS EM FLUXO
Para a implementação de qualquer uma das técnicas de controle vetorial, é
necessário que exista um desacoplamento entre conjugado e fluxo da máquina obtido com
o alinhamento da componente ‘d’ do fluxo orientado. Com isto os modelos da máquina
obtidos anteriormente para os fluxos de rotor, estator e de entreferro, devem ser
modificados inserindo esta condição. Assim obtém-se as equações para implementação do
controlador. Executando o alinhamento do eixo d a componente q dos fluxos tornam-se
zero. A partir desta condição aplicadas às equações (2.12) a (2.14) obtém-se os modelos
desacoplados mostrados nas equações (2.16), (2.17) e (2.18) para os fluxos de rotor, estator
e de entreferro, respectivamente:
0
01
=−
=−+
qsr
mdrsl
dsr
mdr
r
dr
iL
iL
dtd
τψω
τψ
τψ
(2.16)
01
0
=
++−−+
=
++−
dtdi
iiL
dtd
idt
dii
L
dsrdsqsslr
r
sds
r
ds
dsslrqs
rqsr
sdssl
στωττ
ψτ
ψ
ωστσττ
ψω
(2.17)
0
01
=
++−
=
++−−+
dsslrlqs
rlqsr
mdgsl
dsrldsqsslrl
r
mdg
r
dg
idt
dii
L
dtdi
iiL
dtd
ωτττ
ψω
τωττ
ψτ
ψ
(2.18)

24
2.3 O CONTROLE VETORIAL INDIRETO
O método indireto de controle vetorial tem como característica principal não
apresentar a realimentação do vetor de fluxo. Ele se utiliza de um modelo desacoplado da
máquina de indução para gerar as variáveis de controle necessárias à obtenção do
desacoplamento, e assim não existe informação real do vetor fluxo controlado. Por isso, o
método indireto é bastante dependente de um perfeito ajuste entre os parâmetros da
máquina e os usados na malha de controle. Assim, variações de temperatura, a saturação e
o efeito pelicular podem fazer com que os parâmetros da máquina apresentem variações,
fazendo com que o controle não tenha um bom desempenho. Neste método a constante de
tempo do rotor (τr) é um ponto crítico que reduz sua robustez.
As influências da saturação e do efeito pelicular podem ser amenizadas por
uma modelagem mais cuidadosa da máquina, que leve em conta a não linearidade
magnética dos materiais. A previsão da variação da resistência é um problema para este
método. Para solução deste problema utiliza-se algoritmos de estimação, onde se encontra
a maior dificuldade de implementação do método indireto, a estimação de parâmetros. Para
elaboração destes algoritmos são utilizados vários métodos como lógica fuzzy, redes
neurais artificiais, dentre outros [9].
Este método baseia-se inteiramente na relação de escorregamento da máquina
obtida a partir da equação (2.16), conforme mostrada abaixo:
ds
qsrsl i
i=τω ∴
ds
qs
rsl i
iτ
ω1
= (2.19)
O método indireto utiliza-se do fato desta relação ser uma condição necessária
e suficiente para produzir a orientação do campo, ou seja, se a relação de escorregamento é
satisfeita, ids está alinhada com o fluxo de rotor [7]. Por isso sua grande dependência de
uma boa determinação dos parâmetros da máquina, já que τr depende diretamente da
resistência e da indutância de rotor, e tem sido objeto de vários estudos, para sua correta
determinação e/ou estimação, antes e durante a operação do sistema.

25
Um sistema genérico de controle vetorial indireto é apresentado na Figura 2.5,
onde o bloco CVI pode ser substituído por um controlador orientado em qualquer um dos
fluxos da máquina, como mostrados a seguir.
+
- +
dq/abc - +
-
+ +
Figura 2.5 - Estrutura básica do controle vetorial indireto
2.3.1 ORIENTAÇÃO NO FLUXO DE ROTOR
O controlador vetorial indireto com orientação no fluxo de rotor é obtido
manipulando-se a equação (2.16), considerando-se as condições essenciais do controle
vetorial, o fluxo no eixo q é zero (ψqs = 0) e no eixo d é constante (ψds = cte). Assim
obtém-se:
m
rds L
i*
* ψ= (2.20)
*
**
r
qs
r
msl
iLψτ
ω = (2.21)

26
A partir da equação de conjugado e das condições de desacoplamento de fluxo
obtém-se a componente da corrente no eixo ‘q’:
*
** 2
32
r
e
m
rqs
TLL
Pi
ψ= (2.22)
Com as equações (2.20) a (2.22) obtém-se o controlador vetorial indireto com
orientação no fluxo de rotor, mostrado na Figura 2.6 na forma de diagrama de blocos.
Figura 2.6 - Controlador vetorial indireto para orientação no fluxo de rotor
A estrutura deste controlador é bastante simples mostrando sua preferência aos
demais fluxos controlados, como pode ser verificado observando as estruturas orientadas
nos fluxos de estator e entreferro. Os parâmetros da máquina, presentes no controlador,
podem em situações reais, sofrer variações devido a mudanças de temperatura, saturação,
efeito pelicular, etc. Entre os parâmetros que variam no motor a constante de tempo de
rotor é a mais sensível e interfere diretamente na resposta do controlador, por isso alguns
algoritmos de estimação de parâmetros são utilizados para melhorar a resposta do
controlador.

27
2.3.2 ORIENTAÇÃO NO FLUXO DE ESTATOR
Da mesma forma que a efetuada para o fluxo de rotor, manipulando a equação
(2.17) obtém-se as componentes ids*, ωsl
* e iqs*, para o fluxo de estator, mostradas abaixo:
dtd
iL
ir
qsrsls
s
dsστ
στωψ
+
+=
1
**
* (2.23)
*
*
*1
dsrss
r
qsr
sli
L
idtd
στψτ
στω
−
+
= (2.24)
*
** 2
32
s
eqs
TP
iψ
= (2.25)
A partir das equações (2.23) a (2.25) dadas acima, pode-se obter o diagrama
de blocos para orientação no fluxo de estator, como apresentado na Figura 2.7.
Figura 2.7 – Controlador vetorial indireto com orientação no fluxo de estator
Uma das desvantagens desta estrutura é a necessidade de derivar a
componente do eixo ‘q’ da corrente na obtenção do escorregamento. Isto pode acarretar
28
valores elevados de escorregamento para ajustes do ângulo de orientação, durante
transitórios de conjugado. Assim estes valores de escorregamento não podem ser obtidos,
mas se a taxa de variação do conjugado for compatível com os limites impostos ao
inversor, a máquina responde de forma rápida a variações em degrau de sua referência.
Pode-se observar que existe um acoplamento entre os eixos diretos e de
quadratura no controlador, ou seja, a estrutura não apresenta um desacoplamento total entre
os eixos d e q, como existe na orientação pelo fluxo de rotor. Este acoplamento é devido às
indutâncias de dispersão de estator e de rotor existentes no modelo em fluxo para o estator
(bloco στr da Figura 2.7).
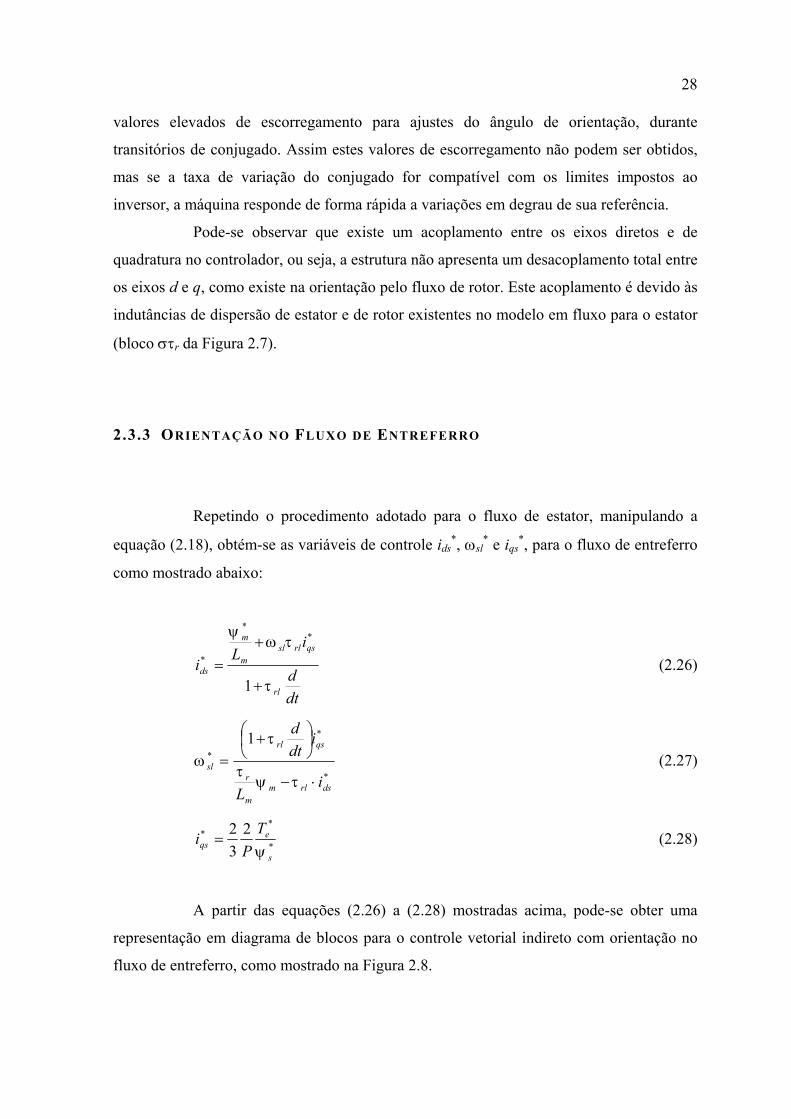
2.3.3 ORIENTAÇÃO NO FLUXO DE ENTREFERRO
Repetindo o procedimento adotado para o fluxo de estator, manipulando a
equação (2.18), obtém-se as variáveis de controle ids*, ωsl
* e iqs*, para o fluxo de entreferro
como mostrado abaixo:
dtd
iL
irl
qsrlslm
m
ds
τ
τωψ
+
+=
1
**
* (2.26)
*
*
*1
dsrlmm
r
qsrl
sl
iL
idtd
⋅−
+
=τψ
τ
τω (2.27)
*
** 2
32
s
eqs
TP
iψ
= (2.28)
A partir das equações (2.26) a (2.28) mostradas acima, pode-se obter uma
representação em diagrama de blocos para o controle vetorial indireto com orientação no
fluxo de entreferro, como mostrado na Figura 2.8.

29
Figura 2.8 – Controlador vetorial indireto com orientação no fluxo de entreferro
A orientação no fluxo de entreferro, apresenta as mesmas características da
orientação no estator, ou seja, necessita de diferenciação da corrente em quadratura para o
cálculo do escorregamento e o acoplamento inerente entre conjugado e fluxo em sua
estrutura.
Nestes dois esquemas de orientação, segundo fluxo de estator e de entreferro,
a relação entre conjugado e freqüência de escorregamento é não linear, fazendo com que
um limite teórico de conjugado em regime permanente exista para operação com fluxo
constante. Mas esse limite é muitas vezes superior ao limite nominal da máquina, portanto
não apresenta problemas em uma situação de implementação prática.

30
2.3.4 CONTROLADOR UNIVERSAL INDIRETO
O controlador universal indireto é obtido da mesma forma que os demais já
citados a partir da equação (2.15), e aplicando as condições de desacoplamento (ψqa =0 e
ψda = cte) e isolando as variáveis de controle ids*, iqs
* e ωsl*, tem-se as equações abaixo:
**
*
*
1
dsama
qsrar
m
sl iaL
idtdaL
⋅−
+
=σψ
τστ
ω (2.29)
+
+=
dtdaL
iaLi
ram
qsslramads
τσ
ωτσψ
1
**** (2.30)
*
** 2
32
a
eqs
TP
iψ
= (2.31)
Com estas equações obtém-se a representação em diagrama de blocos para o
controle vetorial universal indireto, mostrado na Figura 2.9. Este controlador abrange em
uma só estrutura todas as outras possibilidades de orientação de fluxo, variando a constante
‘a’ da Tabela 1.
Figura 2.9 – Controlador universal indireto

31
2.4 O CONTROLE VETORIAL DIRETO
Os métodos diretos de controle vetorial apresentam uma malha fechada de
regulação de fluxo, e portanto se caracterizam pela necessidade de medição ou estimação
das componentes ortogonais do vetor fluxo, ou seja, módulo e fase do vetor. Nesse tipo de
estrutura a aquisição do vetor fluxo é de fundamental importância, sendo este o maior
problema, existindo várias formas para obtenção do fluxo. Ele pode ser estimado ou
diretamente medido utilizando algumas técnicas de medição dentre as mais utilizadas
podemos citar: sensores de efeito hall, bobinas exploradoras, estimadores de fluxo,
observadores de fluxo, entre outras [9],[10].
Os sensores de efeito hall apresentam dificuldades de instalação, pois
necessitam máquinas especiais, além disso os sensores devem ser colocados
ortogonalmente na superfície do estator apresentando sinais altamente distorcidos causados
pelo efeito das ranhuras do motor. Outra desvantagem é de apresentarem mau desempenho
em condições de excesso de vibração e de temperatura, e uma de suas vantagens é
apresentar bom desempenho em baixas velocidades.
As bobinas exploradoras apresentam menor dificuldade de instalação e
eliminam o efeito das ranhuras do rotor, mas também necessitam de máquinas especiais
para sua instalação. Sua principal desvantagem é a necessidade de se conhecer os
parâmetros da máquina para síntese do vetor fluxo, por isso não são eficazes em baixas
velocidades.
As dificuldades apresentadas pelo uso de sensores para medição direta,
principalmente para a instalação, fez com que essa solução fosse logo descartada, e
estratégias alternativas baseadas em técnicas de controle moderno, como estimadores e
observadores de fluxo modelados em corrente ou em tensão, sejam os métodos mais
usados.
Os estimadores de fluxo fazem uso basicamente das quantidades terminais da
máquina como tensão, corrente e velocidade para, a partir do modelo da máquina estimar
as componentes de fluxo, mas não apresentam mecanismos para compensação de erro de
predição. Por isso tem grande sensibilidade à variação paramétrica, e assim não são
eficientes em baixas velocidades.

32
Os observadores de fluxo podem ser ditos como estimadores em malha
fechada, ou seja, possuem mecanismos para compensação de erro de predição, mesmo
assim ainda apresentam problemas em baixas velocidades.
Como pode-se observar o controlador vetorial direto não depende da relação
de escorregamento da máquina mas sim da qualidade da medição da posição dos fluxos
orientados.
A estrutura básica do acionamento vetorial direto é mostrado na Figura 2.10,
e da mesma maneira que no método indireto, o bloco CVD pode ser substituído por
qualquer um do esquemas dados para cada um dos fluxo controlados. O bloco estimador
pode ser considerado qualquer um dos métodos de medição do fluxo.
+ -
+ - dq/abc
+ -
Figura 2.10 – Estrutura do acionamento vetorial direto
2.4.1 ORIENTAÇÃO NO FLUXO DE ROTOR
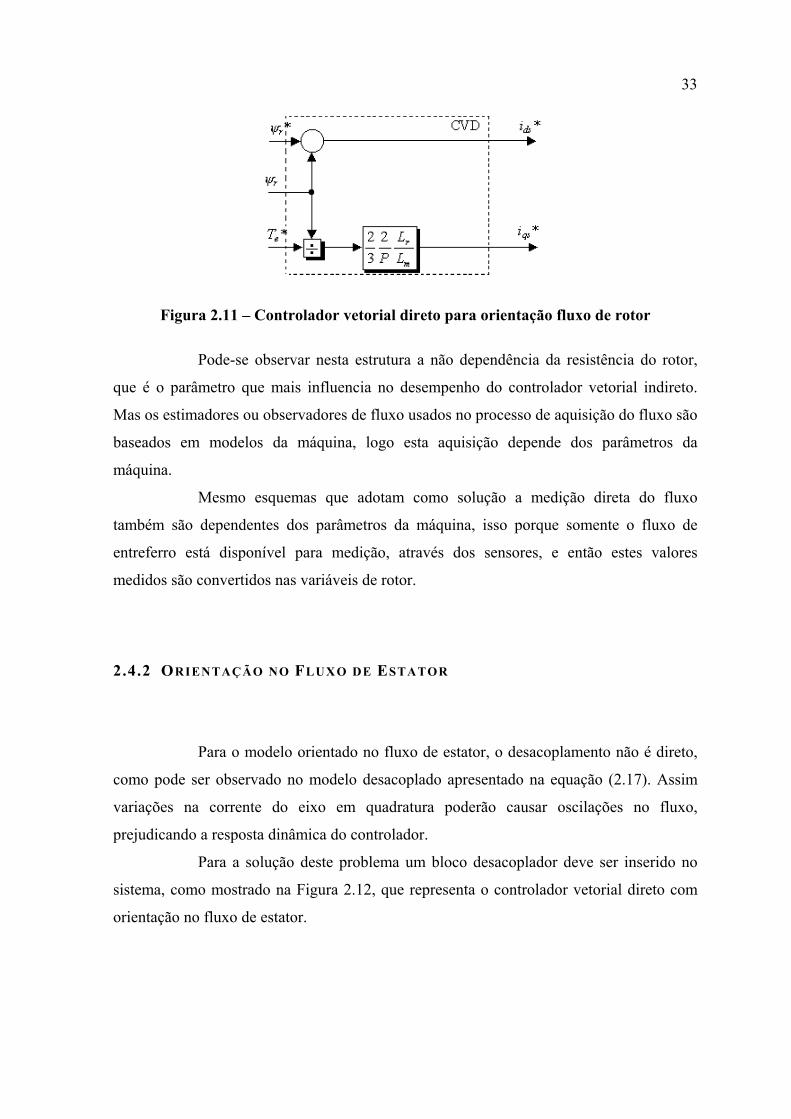
A estrutura básica do controlador vetorial direto com orientação no fluxo de
rotor, é apresentado na Figura 2.11.
33
Figura 2.11 – Controlador vetorial direto para orientação fluxo de rotor
Pode-se observar nesta estrutura a não dependência da resistência do rotor,
que é o parâmetro que mais influencia no desempenho do controlador vetorial indireto.
Mas os estimadores ou observadores de fluxo usados no processo de aquisição do fluxo são
baseados em modelos da máquina, logo esta aquisição depende dos parâmetros da
máquina.
Mesmo esquemas que adotam como solução a medição direta do fluxo
também são dependentes dos parâmetros da máquina, isso porque somente o fluxo de
entreferro está disponível para medição, através dos sensores, e então estes valores
medidos são convertidos nas variáveis de rotor.
2.4.2 ORIENTAÇÃO NO FLUXO DE ESTATOR
Para o modelo orientado no fluxo de estator, o desacoplamento não é direto,
como pode ser observado no modelo desacoplado apresentado na equação (2.17). Assim
variações na corrente do eixo em quadratura poderão causar oscilações no fluxo,
prejudicando a resposta dinâmica do controlador.
Para a solução deste problema um bloco desacoplador deve ser inserido no
sistema, como mostrado na Figura 2.12, que representa o controlador vetorial direto com
orientação no fluxo de estator.

34
Figura 2.12 – Controlador vetorial direto com circuito desacoplador
O bloco desacoplador pode ser deduzido a partir da resposta de eixo direto do
diagrama de blocos da Figura 2.12, que é dado por:
( ) dqssds isGi +−= ψψ ** )( (2.32)
onde G(s) é a função de transferência do controlador de fluxo.
A equação do desacoplador é obtida aplicando as condições de
desacoplamento a equação (2.32), e considerando os valores de escorregamento de regime,
evitando assim o cálculo de algumas derivadas e afetando muito pouco a resposta do
sistema.[9]. A equação simplificado do desacoplador é então:
( )*
2*
dsss
qssdq iL
iLi
αψ
α
−= (2.33)
2.4.3 ORIENTAÇÃO NO FLUXO DE ENTREFERRO
O controlador vetorial com orientação no fluxo de entreferro pode ser obtido
de forma totalmente análoga ao com orientação no fluxo de estator apresentando também
os mesmos problemas de desacoplamento, que pode ser observado na expressão (2.18). A
estrutura do controlador com orientação no fluxo de entreferro é a mesma para o fluxo de
estator mostrado na Figura 2.12, substituindo-se os sub-índices s por m.

35
O circuito desacoplador também é obtido da mesma forma, e fazendo as
mesmas simplificações, assim tem-se para orientação no fluxo de estator a seguinte
equação:
−
=*
2*
dsmr
lrm
qsmr
lr
dq
iLLL
iLLL
iψ
(2.34)
2.4.4 CONTROLADOR UNIVERSAL DIRETO
Da mesma forma, que no controle vetorial indireto, todas as estruturas
apresentadas aqui podem ser generalizadas, no controlador universal direto.
O esquema do controlador também é o mesmo do controlador para o fluxo de
estator, fazendo as respectivas adaptações dos sub-índices, e a determinação do circuito do
desacoplador, parte do mesmo princípio, a partir do modelo generalizado deduzido
anteriormente, e consirando as mesmas simplificações. Assim a equação do bloco
desacoplador para o controlador vetorial universal direto e dada abaixo:
( )*
2*
dsama
qsamdq iaL
iaLi
σψ
σ
−= (2.35)
Os valores de σa e τr são os mesmos deduzidos anteriormente, e os valores de
‘a’ são os mesmos dados na Tabela 1. Pode-se observar que para orientação em fluxo no
rotor o valor de idq é zero, mostrando o desacoplamento para esta estrutura.
2.5 CONCLUSÃO
Neste capítulo foram apresentados os princípios básicos do controle vetorial
bem como seus principais métodos, método direto e indireto. São apresentados ainda as
equações e esquemas dos controladores clássicos para os vários eixos de referências:
estator, rotor, entreferro e arbitrário. No capítulo seguinte será apresentado o sistema de
controle vetorial alternativo.

36
CAPÍTULO 3
CONTROLE VETORIAL ALTERNATIVO
3.1 BOBINAS ACOPLADAS
Uma analogia ao motor de indução pode ser feita, para uma melhor
compreensão da resposta do motor de indução, com um par de bobinas acopladas [2], ou
seja, um transformador com igual número de espiras no primário e no secundário, com o
secundário curto circuitado. Esta analogia é possível pois o motor de indução utiliza-se do
mesmo princípio de um transformador, a indução magnética, a grande diferença é que no
transformador o secundário é fixo e no motor de indução ele esta livre para girar,
produzindo um conjugado. Curto circuita-se o secundário do transformador para uma
melhor comparação, visto que no motor de indução as barras do rotor estão curto
circuitadas.
Figura 3.1 – Bobinas acopladas com secundário curto-circuitado
Como observa-se na equação (2.11) o conjugado no motor de indução é
proporcional ao produto da corrente de rotor e o fluxo de rotor, a resposta de conjugado
depende do comportamento dessas duas variáveis do rotor em condições transitórias.
Analisando o sistema do transformador tem-se as tensões do primário e secundário e os
fluxos do sistema, mostrados abaixo:

37
dtdi
Mdtdi
LiRv 211111 ++= (3.1)
dtdi
Mdtdi
LiRv 122222 0 ++== (3.2)
2111 MiiL +=ψ (3.3)
1222 MiiL +=ψ (3.4)
onde L1 e L2 são as indutâncias próprias do primário e do secundário, R1 e R2
são as resistências do primário e do secundário e M é a indutância de magnetização.
Aplicando a transformada de Laplace à equação de tensão do secundário tem-se:
)(1
)( 122
2 sIs
sLMsI
+
−=τ
(3.5)
onde τ2 = L2/R2 é a constante de tempo do secundário. Se a corrente no
primário varia em um degrau de 0 até I, a transformada de Laplace dela é I1(s) = I/s, assim
a corrente resultante no secundário no domínio do tempo é dado por:
2/
22 )( τtIe
LMti −−= (3.6)
Para uma variação em degrau na corrente do primário o fluxo do secundário
no domínio do tempo é dado por:
[ ]2/2 1)( τψ teMIt −−= (3.7)
A partir das equações (3.6) e (3.7) pode-se perceber facilmente a resposta da
corrente e do fluxo no secundário, em t = 0+ a corrente no secundário será igual à
constante da equação (3.6) e o fluxo se mantém igual a zero, como pode ser visto na Figura
3.2.
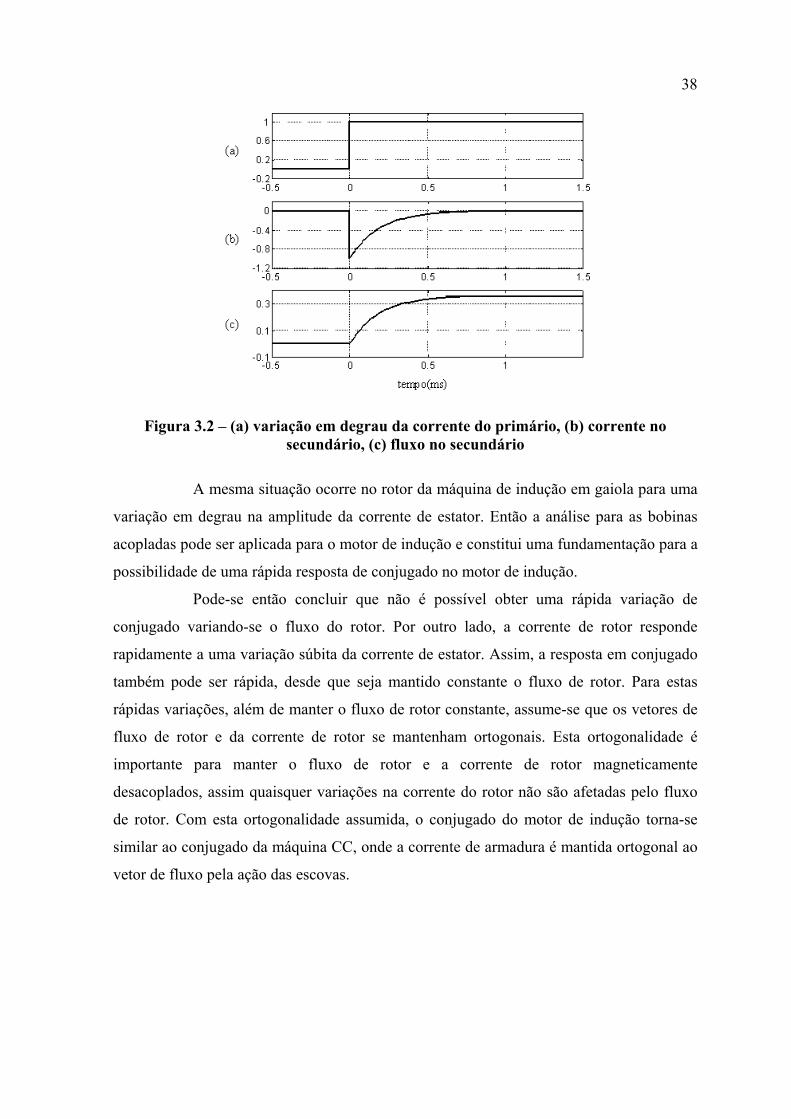
38
Figura 3.2 – (a) variação em degrau da corrente do primário, (b) corrente no secundário, (c) fluxo no secundário
A mesma situação ocorre no rotor da máquina de indução em gaiola para uma
variação em degrau na amplitude da corrente de estator. Então a análise para as bobinas
acopladas pode ser aplicada para o motor de indução e constitui uma fundamentação para a
possibilidade de uma rápida resposta de conjugado no motor de indução.
Pode-se então concluir que não é possível obter uma rápida variação de
conjugado variando-se o fluxo do rotor. Por outro lado, a corrente de rotor responde
rapidamente a uma variação súbita da corrente de estator. Assim, a resposta em conjugado
também pode ser rápida, desde que seja mantido constante o fluxo de rotor. Para estas
rápidas variações, além de manter o fluxo de rotor constante, assume-se que os vetores de
fluxo de rotor e da corrente de rotor se mantenham ortogonais. Esta ortogonalidade é
importante para manter o fluxo de rotor e a corrente de rotor magneticamente
desacoplados, assim quaisquer variações na corrente do rotor não são afetadas pelo fluxo
de rotor. Com esta ortogonalidade assumida, o conjugado do motor de indução torna-se
similar ao conjugado da máquina CC, onde a corrente de armadura é mantida ortogonal ao
vetor de fluxo pela ação das escovas.

39
3.2 TRIÂNGULO DE FLUXO DE ROTOR
Em condições de regime permanente o fluxo de rotor permanece alinhado com
o eixo ‘d’ do sistema de referência síncrono, mantendo-se assim até que uma variação de
carga, ou da corrente de controle da máquina provoque alguma alteração nestas condições.
Como observado na Figura 3.3, para duas condições de cargas diferentes, a
corrente de estator e o fluxo de rotor estão sempre defasados de um ângulo ξ, que a partir
da expressão (2.19), pode ser mostrado que:
)( rslarctg τωξ = (3.8)
d
q
ids
δ
ξ2 ξ1
2smiLr
2rr iLr
1smiLr
1rr iLr
rψr
2
1
Figura 3.3 – Triângulo do Fluxo concatenado de rotor para duas condições de carga
Independente da estratégia de controle adotada e da condição de carga, os
vetores de fluxo de rotor e corrente de rotor são sempre ortogonais em regime permanente
e a posição relativa ξ entre o vetor corrente de estator e ovetor fluxo de rotor é a
informação de ângulo essencial no controle vetorial. Para o controle vetorial “tradicional”
esse ângulo ξ é adicionado ao ângulo θs (ângulo de defasagem entre o eixo de referência
estacionário e o eixo de referência síncrono), para gerar a posição absoluta do vetor
corrente de estator e proceder às transformações matriciais necessárias. No controle
vetorial alternativo o ângulo ξ é controlado diretamente, não havendo necessidade de gerar
a posição absoluta do vetor corrente de estator.

40
Um controle em tempo real do ângulo ξ, mantém os vetores de fluxo de rotor e
corrente de rotor sempre ortogonais e o fluxo de rotor pode ser mantido constante,
condições essenciais para o desacoplamento da máquina de indução.
Logo, variando simultaneamente a amplitude Is, a velocidade síncrona ωs e a
posição relativa ξ do vetor de corrente do estator, através de expressões pré-definidas,
mostradas mais adiante, mantém-se um fluxo constante enquanto varia-se rapidamente a
corrente de rotor, e conseqüentemente o conjugado eletromagnético.
Estes princípios acima descritos compõem os princípios básicos do controle
vetorial “alternativo”, proposto inicialmente por [2], e ilustrado na Figura 3.3.
3.3 CONDIÇÕES PARA OBTENÇÃO DE TRANSIÇÃO RÁPIDA DE
CONJUGADO
Para uma variação rápida de conjugado, algumas condições devem ser
obedecidas conforme já citado anteriormente; a Figura 3.3 mostra a variação dos vetores
em regime permanente de uma máquina de indução para duas condições de carga
diferentes. O ponto 1 é definido pela freqüência de escorregamento ωsl1 e magnitude Is1, o
que resulta num conjugado T1; o ponto de operação 2 é definido pela freqüência de
escorregamento ωsl2 e pela magnitude Is2, o que resulta num conjugado T2. Supondo-se que
os pontos de operação 1 e 2 estão relacionados, em conjugado, pelo fator k, ou seja, T2 =
kT1, as condições necessárias para a transição de 1 para 2, sem oscilações, são dadas em [2]
e repetidas nas equações (3.9) a (3.11).
(a) A freqüência da fmm de estator deve variar de forma tal que a freqüência
de escorregamento obedeça a seguinte expressão:
12 slsl kωω = (3.9)
(b) A amplitude da corrente de estator deve variar na seguinte proporção:

41
21
21
1
2
)(1
)(1
rsl
rsl
s
s kII
τω
τω
+
+= (3.10)
(c) E a fase da fmm do estator deve variar de acordo com a expressão:
)()( 1112 rslrsl tanarcktanarc τωτωξξδ −=−= (3.11)
As condições acima foram utilizadas em um sistema em malha aberta para
comprovar a validade do método alternativo de controle vetorial. Naquele experimento
somente dois pontos de operação da máquina foram utilizados, calculando previamente os
valores de amplitude, freqüência e fase para as duas condições de conjugado. O
experimento foi realizado com velocidade zero, e variando o conjugado aplicado no eixo e
ao mesmo tempo variando, a amplitude, freqüência e fase para o novo ponto de operação,
mantendo o eixo da máquina em velocidade zero, como esperado.
As equações (3.9) a (3.11) são validas somente para o sistema em malha
aberta, mas em [1], o equacionamento para o sistema em malha fechada é proposto,
variando as três variáveis de controle, amplitude, freqüência e fase, através das correntes
de estator ids e iqs, descritas abaixo:
22qsdss iiI += (3.12)
ds
qs
rsl i
iτ
ω1
= (3.13)
ds
qs
ii
tanarc=ξ (3.14)
Assim, mantendo-se a componente de fluxo da corrente de estator ids
constante, uma variação brusca na componente de conjugado iqs, resulta em mudança
brusca na amplitude, na freqüência de escorregamento e na fase da corrente de estator, ou
seja, as condições do estator podem ser descritas em termos das variáveis Is, ωsl e ξ, que
podem ser obtidos diretamente de ids e iqs, como mostram as equações (3.12) a (3.14).

42
3.4 FORMA HÍBRIDA (ANALÓGICA E DIGITAL) DO CONTROLE
VETORIAL ALTERNATIVO
O sistema de controle vetorial alternativo, implementado em [1], é aqui
chamado de forma híbrida de controle vetorial alternativo, pois sua implementação foi
executada com a utilização de vários módulos, digitais e analógicos, como mostrado na
Figura 3.4.
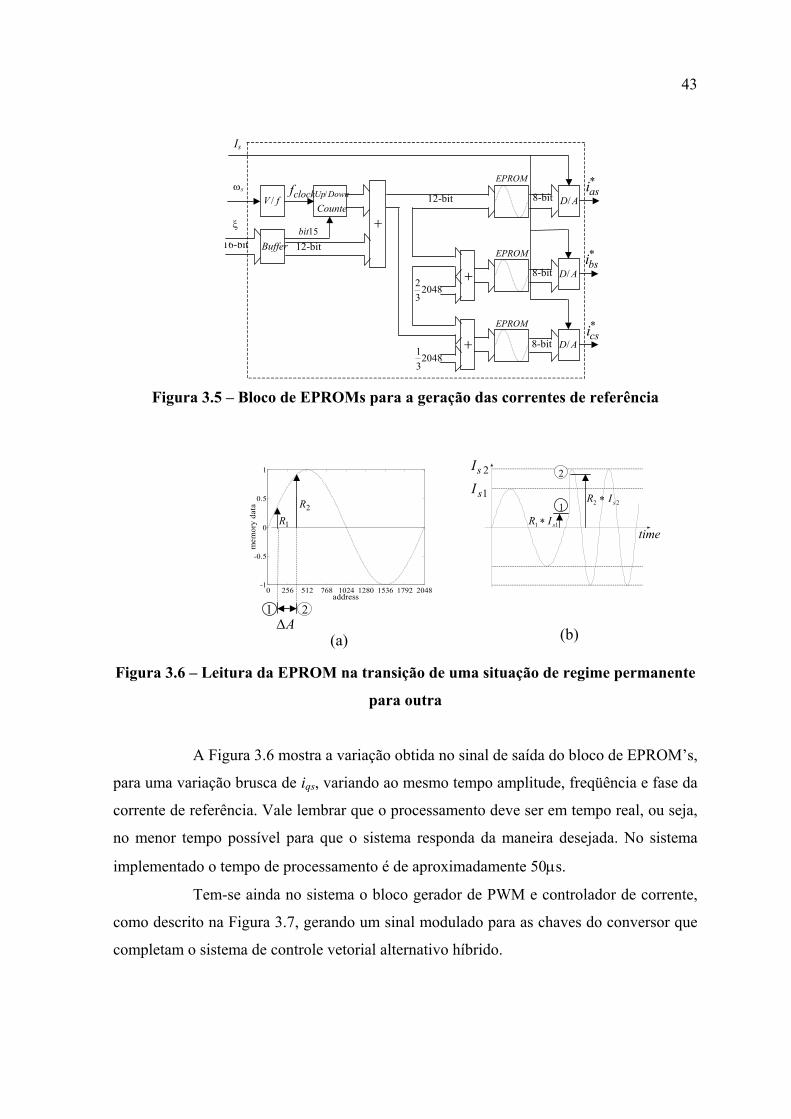
Figura 3.4 – Sistema de Controle Vetorial Alternativo Híbrido
O bloco µP é a unidade de processamento implementada com um PC e uma
placa de aquisição de dados, onde as variáveis Is, ωs e ξ são atualizadas e enviadas ao bloco
de EPROM’s, que gera as correntes de referência através de senóides armazenadas em
2048 endereços de uma EPROM. As variáveis Is, ωs e ξ eram utilizadas na geração destas
correntes de referência onde ωs determina a freqüência de leitura dos dados na memória,
determinando assim a freqüência síncrona da máquina, ξ determina o ponto de leitura da
senóide, variando portanto a fase da corrente de referência e o sinal Is através de conversor
digital-analógico determina a amplitude da corrente, como mostrado na Figura 3.5.
43
16-bit
Is
ξ
ωs
8-bit
8-bit
8-bit 12-bit
12-bit
AD/
AD/
AD/
+
+
+
clockf
*bsi
*csi
*asiDownUp/
CountefV /
204832
EPROM
EPROM
EPROM
204831
Buffer15bit
Figura 3.5 – Bloco de EPROMs para a geração das correntes de referência
0 256 512 768 1024 1280 1536 1792 2048-1
-0.5
0
0.5
1
address
mem
ory
data
1R2R
A∆1 2
1sI2sI
time
2
111 sIR ∗
22 sIR ∗
(b) (a)
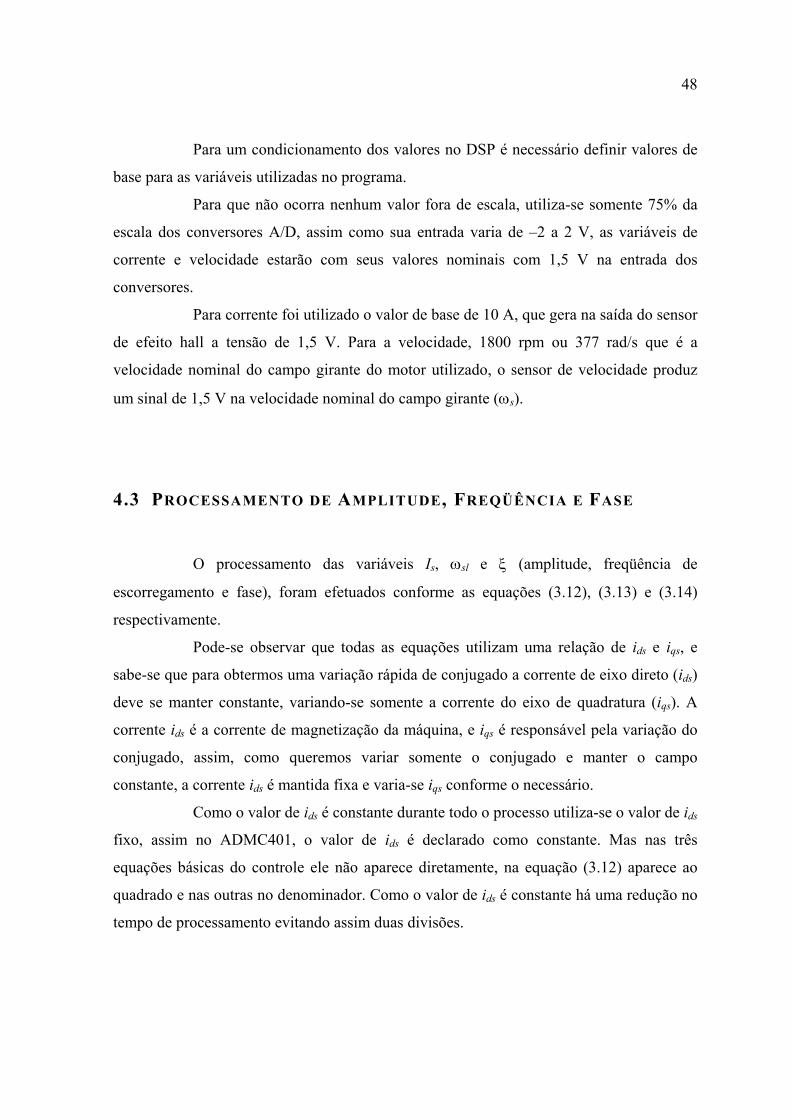
Figura 3.6 – Leitura da EPROM na transição de uma situação de regime permanente
para outra
A Figura 3.6 mostra a variação obtida no sinal de saída do bloco de EPROM’s,
para uma variação brusca de iqs, variando ao mesmo tempo amplitude, freqüência e fase da
corrente de referência. Vale lembrar que o processamento deve ser em tempo real, ou seja,
no menor tempo possível para que o sistema responda da maneira desejada. No sistema
implementado o tempo de processamento é de aproximadamente 50µs.
Tem-se ainda no sistema o bloco gerador de PWM e controlador de corrente,
como descrito na Figura 3.7, gerando um sinal modulado para as chaves do conversor que
completam o sistema de controle vetorial alternativo híbrido.

44
Figura 3.7 – Bloco gerador de PWM e controlador de corrente
3.5 CONCLUSÃO
Neste capítulo é apresentado um breve resumo do controle vetorial alternativo
desde sua primeira implementação. São apresentadas as principais equações das duas
implementações e uma visão da estrutura híbrida a ser digitalizada. O próximo capítulo
trata da digitalização e hardware utilizado na implementação do sistema.

45
CAPÍTULO 4
DIGITALIZAÇÃO DO CONTROLE VETORIAL ALTERNATIVO
Para a digitalização do sistema de controle vetorial alternativo implementado
em [1], utilizaremos o kit de desenvolvimento do ADMC401 da Analog Devices que é um
Processador Digital de Sinais (DSP) especialmente desenvolvido para o controle de
motores, com processamento de 26 MIPS em 16 bits em ponto fixo, conversor A/D de 8
canais em 12 bits, conversor D/A de 8 canais em 12 bits, saída PWM trifásica, 2 portas
seriais e 12 pinos de I/O de propósito geral, e uma interface para encoder de três canais,
entre outras características [16], [17], [19].
4.1 ORGANIZAÇÃO DO ALGORITMO
O desenvolvimento do algoritmo foi dividido em 5 partes principais, para um
melhor entendimento da completa operação do sistema. Essas partes foram chamadas de
unidade de aquisição de dados, unidade de processamento de amplitude freqüência e fase,
unidade de geração do sinal de referência de corrente, unidade do controlador de corrente e
unidade de geração dos sinais PWM, que serão detalhadas adiante.
Todas as operações são seqüenciais e obrigatórias, não possuindo partes do
algoritmo que são executadas conforme alguma condição do sistema.
Todo o algoritmo mostrado na Figura 4.1 inicia sua execução pelo pulso de
PWMSYNC, todo o programa a ser executado fica dentro da rotina desta interrupção. Isso
ocorre devido a uma característica própria do DSP, evitando assim que o processo seja
interrompido por outra operação do processador, e que sinais com freqüência maior que a
freqüência de chaveamento do conversor sejam amostrados durante a conversão, já que a
conversão dos conversores A/D é iniciada com o mesmo pulso. Essa interrupção ocorre
duas vezes a cada período de PWM, isto é a cada 50µs, visto que, é utilizada uma
freqüência de chaveamento de 10kHz [18].

46
22qsds ii +
ds
qs
ii
arctg
ds
qs
r ii
τ1
∫ sω
Início
Inicializa as constantes e variáveis de entrada
Inicializa as subrotinas
de programa
NÃO Loop de Espera
Aguarda interrupção
SIM
Lê velocidade (ωr) e correntes (Ia, Ib, Ic) Aquisição de Dados
Calcula valor de iqs PI no sinal de ωr
Calcula valor de Is
Processamento de Amplitude, Freqüência e Fase Calcula valor de ξ
Calcula valor de ωsl
Calcula valor de ωs
ωsl +ωr
Calcula valor de θ
Geração do Sinal de Referência de Corrente
Calcula as senóides de referência (Ia
*, Ib*, Ic
*)
Calcula as senóides de saída (Ia, Ib, Ic)
Controlador de Corrente
Atualiza saídas PWM Geração do Sinal PWM
Figura 4.1 - Estrutura do Algoritmo implementado

47
Quando iniciado o processo, o DSP inicializa todas as constantes e variáveis
do sistema, desabilita todas as interrupções pendentes no processador e entra no loop
principal do programa, que não faz nada, apenas aguarda a execução da interrupção
PWMSYNC.
4.2 CONDICIONAMENTO E AQUISIÇÃO DE DADOS
Como todo o processamento do sistema está implementado em software, todas
as variáveis devem ser condicionadas para utilização no DSP. O ADMC401 é um
processador digital de sinais especialmente desenvolvido para obter-se alto desempenho no
controle de máquinas elétricas, que opera em 16 bits e aritmética de ponto fixo.
O ADMC401 tem como sistema de numeração padrão, o formato 1.15 (um
ponto quinze) para suas variáveis, utilizando a aritmética de complemento de dois,
consegue representar números que variam de –1 a 1 – 2–15. Mas outros formatos também
podem ser utilizados, desde operações não sinalizadas a formatos que representam
variáveis maiores como, 3.13, 5.11 e etc. Mas um cuidado especial deve ser tomado pelo
programador quando da utilização de formatos de variáveis diferentes.
O formato 1.15 apresenta a vantagem de transformar todas as variáveis do
sistema em pu, e a partir daí processá-las da maneira necessária. Neste formato o 1 mostra
o sinal do número, sendo este o bit mais significativo (MSB), e os outros quinze bits
representam o tamanho do número, representando assim números variando de
–1 a 1 – 2–15. A Figura 4.2 mostra alguns exemplos de números e sua representação em
formato 1.15.
Número em 1.15 Equivalente Decimal 0x0001 0,000031 0x7FFF 0,999969 0xFFFF –0,000031 0x8000 –1,000000 -20 2-1 2-2 2-3 2-4 2-5 2-6 2-7 2-8 2-9 2-10 2-11 2-12 2-13 2-14 2-15
Figura 4.2 - Representação para números em formato 1.15
48
Para um condicionamento dos valores no DSP é necessário definir valores de
base para as variáveis utilizadas no programa.
Para que não ocorra nenhum valor fora de escala, utiliza-se somente 75% da
escala dos conversores A/D, assim como sua entrada varia de –2 a 2 V, as variáveis de
corrente e velocidade estarão com seus valores nominais com 1,5 V na entrada dos
conversores.
Para corrente foi utilizado o valor de base de 10 A, que gera na saída do sensor
de efeito hall a tensão de 1,5 V. Para a velocidade, 1800 rpm ou 377 rad/s que é a
velocidade nominal do campo girante do motor utilizado, o sensor de velocidade produz
um sinal de 1,5 V na velocidade nominal do campo girante (ωs).
4.3 PROCESSAMENTO DE AMPLITUDE, FREQÜÊNCIA E FASE
O processamento das variáveis Is, ωsl e ξ (amplitude, freqüência de
escorregamento e fase), foram efetuados conforme as equações (3.12), (3.13) e (3.14)
respectivamente.
Pode-se observar que todas as equações utilizam uma relação de ids e iqs, e
sabe-se que para obtermos uma variação rápida de conjugado a corrente de eixo direto (ids)
deve se manter constante, variando-se somente a corrente do eixo de quadratura (iqs). A
corrente ids é a corrente de magnetização da máquina, e iqs é responsável pela variação do
conjugado, assim, como queremos variar somente o conjugado e manter o campo
constante, a corrente ids é mantida fixa e varia-se iqs conforme o necessário.
Como o valor de ids é constante durante todo o processo utiliza-se o valor de ids
fixo, assim no ADMC401, o valor de ids é declarado como constante. Mas nas três
equações básicas do controle ele não aparece diretamente, na equação (3.12) aparece ao
quadrado e nas outras no denominador. Como o valor de ids é constante há uma redução no
tempo de processamento evitando assim duas divisões.

49
4.3.1 DECLARAÇÃO DAS CONSTANTES DA MÁQUINA
A corrente de magnetização de nossa máquina é ids = 2,7 A, convertendo este
valor para o valor em pu temos:
puids 2863,010175,027,2 =××=
Convertendo para o formato 1.15 em hexadecimal tem-se:
hpui hds 24A522863,0 15 →×=
Para utilização nas equações do sistema de controle vetorial alternativo não
precisamos de ids, mas sim de e i , assim para i tem-se: 2dsi 1−
ds2ds
puids 2863,0= ∴ i puds 0819,02 =
Convertendo para o formato 1.15 em hexadecimal tem-se:
hi hds 0A7D20819,0 152 →×=
E para i tem-se: 1−ds
puids 2863,0= ∴ puids
4928,31=
Pode-se observar que o valor de é maior que 1, logo a representação em
formato 1.15 não é suficiente para representar números deste tamanho, assim outro formato
é necessário para esta variável. Utiliza-se o formato 4.12 que pode representar valores de
–7 a 7 – 2
1−dsi
–12, assim tem-se:

50
hi
h
ds37E224928,31 12 →×=
Utiliza-se assim duas constantes para os valores de e 1/i2dsi ds.
4.3.2 DETERMINAÇÃO DA CONSTANTE DE TEMPO DO ROTOR (τR)
Outra constante necessária ao processamento é o valor de τr. Este valor é
obtido usando uma mola e um braço perpendicular ao eixo do motor como mostrado na
Figura 4.3. O sistema braço-mola é utilizado para determinação do ponto de conjugado
máximo do motor.
MIT
Figura 4.3 – Sistema para Medição da Constante de Tempo do Rotor (τr)
O ponto de conjugado máximo é obtido mantendo-se a corrente constante
controlada via DSP, de maneira a obter a corrente de magnetização desejada no ponto de
máximo conjugado. Varia-se a freqüência do campo girante ωs até que a mola apresente
seu maior alongamento, sendo este o ponto de máximo conjugado do motor.
Neste trabalho obteve-se o máximo alongamento da mola a 1,22Hz, assim
através da equação (4.1) obtém-se uma constante de tempo de rotor de 130ms.
slr f⋅=
πτ
21 (4.1)

51
Como valor de base de tempo é utilizado o valor de velocidade de 377 rad/s.
Assim transformando o valor de τr para uma freqüência em rad/s tem-se:
307,4821=× π
τ r
rad/s
Em pu tem-se:
pur 0961,0377
307,4875,01 =×=−τ
Passando para hexadecimal:
hhr 0C4D20961,0 151 →×=−τ
4.3.3 DISCRIMINAÇÃO DOS BLOCOS DE CONTROLE
O cálculo da amplitude da corrente de referência (Is ) utiliza a equação (3.12).
A implementação desta equação necessita de uma rotina de raiz quadrada e um quadrado
visto que é uma constante. O fluxograma desta rotina é mostrado na Figura 4.4. 2dsi
O bloco “Calcula raiz quadrada” utiliza uma rotina do application notes do
fabricante, assim ele necessita de algumas transformações de variáveis visto que a rotina
utiliza um formato de entrada 16.16 sem sinal, ou seja, ela pode executar a raiz quadrada
para valores de 0 a 65535, e sua saída é um número no formato 8.8, assim é necessário os
blocos de transformação de variáveis antes e depois da raiz quadrada.
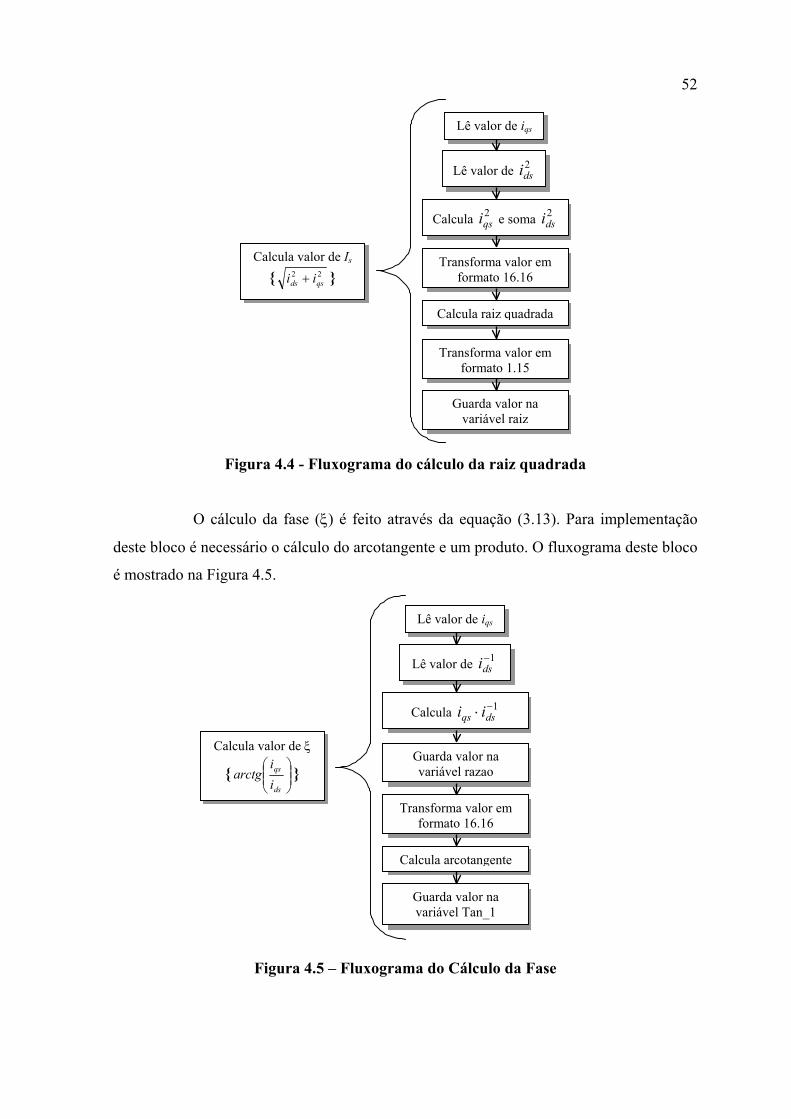
52
Lê valor de iqs
Lê valor de 2dsi
Calcula i e soma i 2qs
2ds
Transforma valor em formato 16.16
Calcula raiz quadrada
Transforma valor em formato 1.15
Guarda valor na variável raiz
Calcula valor de Is 22
qsds ii +
Figura 4.4 - Fluxograma do cálculo da raiz quadrada
O cálculo da fase (ξ) é feito através da equação (3.13). Para implementação
deste bloco é necessário o cálculo do arcotangente e um produto. O fluxograma deste bloco
é mostrado na Figura 4.5.
ds
qs
ii
arctg
1−dsi
1−⋅ dsqs i
Guarda valor na variável Tan_1
Guarda valor na variável razao
Calcula arcotangente
Transforma valor em formato 16.16
Calcula i
Lê valor de
Lê valor de iqs
Calcula valor de ξ
Figura 4.5 – Fluxograma do Cálculo da Fase

53
Para a execução do arcotangente também utiliza-se uma rotina já
implementada pelo fabricante em seu application notes[18], e da mesma forma que na raiz
quadrada esta rotina necessita de algumas transformações de variáveis, uma vez que sua
entrada é no formato 16.16 com sinal, ou seja, o primeiro bit da parte inteira representa o
sinal. Já no sinal de saída nenhuma transformação é necessária visto que sua saída já se
encontra no formato 1.15.
Para o cálculo da freqüência de escorregamento (ωsl) aplica-se a equação
(3.14). Nesta parte, é necessário somente um produto, como observado na Figura 4.6.
Lê valor de razao
Lê valor de τ 1−r
Calcula razao 1−⋅ rτ
Guarda valor na variável ωsl
Calcula valor de ωsl
ds
qs
r ii
τ1
Figura 4.6 - Fluxograma do Cálculo da Freqüência de Escorregamento
A partir do valor de ωsl calculado é necessário calcular agora a velocidade
síncrona da máquina somando a velocidade real lida através do conversor analógico para
digital, como mostrado na Figura 4.7.
Calcula ωsl +ωr
Lê valor de ωr
Lê valor de ωsl
Guarda valor na variável ωs
Calcula valor de ωs ωsl +ωr
Figura 4.7 - Fluxograma do cálculo da velocidade síncrona
Ao final destas etapas todas as variáveis de controle já foram calculadas e
armazenadas para o cálculo das correntes de referência.

54
4.4 GERAÇÃO DO SINAL DE REFERÊNCIA DE CORRENTE
O sinal de referência de corrente é calculado em cada ciclo, utilizando o
cálculo da senóide disponível nos applications notes do fabricante [18].
Aqui aparece a maior diferença do sistema híbrido ao digitalizado: como
citado anteriormente, os sinais de referência da corrente no sistema híbrido foram obtidos a
partir de senóides previamente gravadas em EPROM’s onde se varia a freqüência e o ponto
de leitura, para uma variação de freqüência e fase da onda de referência. No presente
projeto optou-se pelo cálculo da senóide de referência, utilizando-se os valores de
amplitude, freqüência e fase previamente calculados. Isso foi implementado no sistema
híbrido para diminuir o tempo de processamento do sistema, o que não é problema no
presente projeto, devido à alta velocidade de processamento do DSP.
Para o cálculo das senóides é necessário possuir o valor do ângulo θ que é
obtido através da integral de ωs. A integral foi efetuada através da regra dos trapézios como
mostrado na equação 4.2.
amostsants
antatual T⋅++=
2ωω
θθ (4.2)
onde: θ é a posição instantânea da referência síncrona em relação a referência
estacionária, e Tamost é o tempo de amostragem do sistema.
Com o valor de θ calculado pode-se obter o valor das correntes de referência.
A seqüência de operações é descrita na Figura 4.8.
A operação descrita na Figura 4.8 é repetida para as fases B e C com a
diferença que uma constante 2π/3 é subtraída da soma de θ + ξ, na fase B e somada na fase
C, e o valores obtidos são guardados nas variáveis VrefB e VrefC, respectivamente. Esses
valores são somados e subtraídos para produzir o defasamento entre as fases.
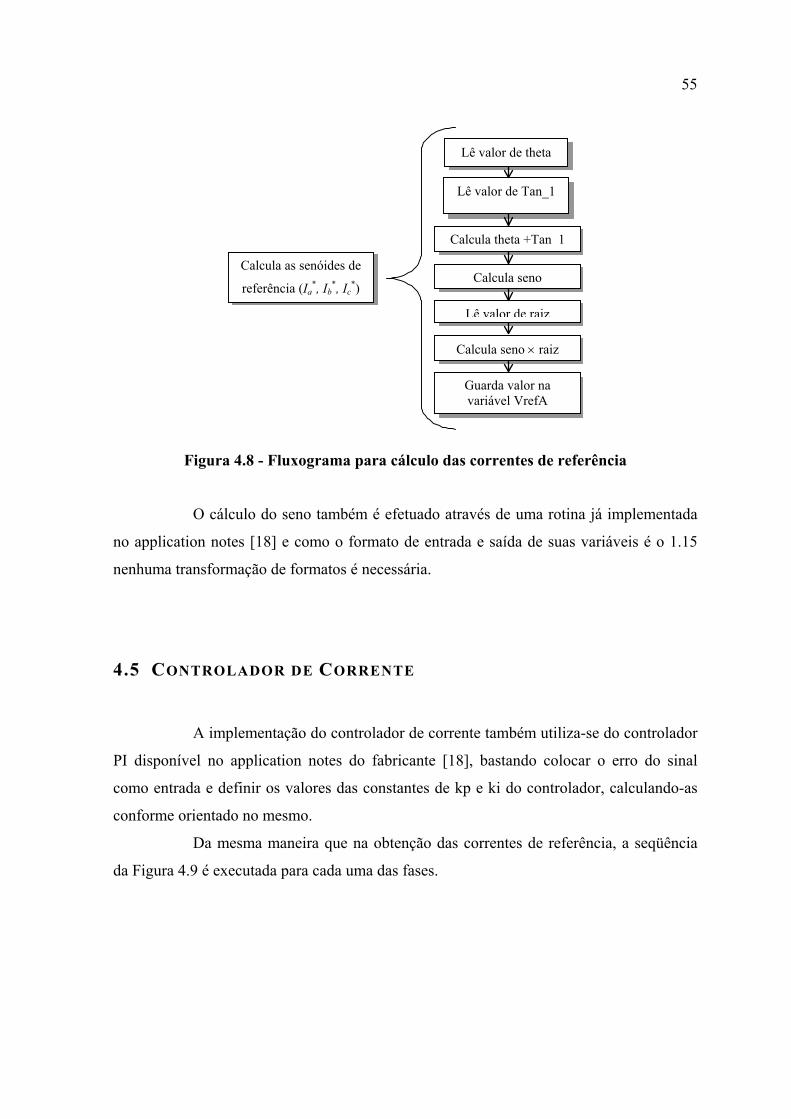
55
Lê valor de theta
Lê valor de Tan_1
Calcula theta +Tan_1
Lê valor de raiz
Calcula seno × raiz
Calcula seno
Guarda valor na variável VrefA
Calcula as senóides de
referência (Ia*, Ib
*, Ic*)
Figura 4.8 - Fluxograma para cálculo das correntes de referência
O cálculo do seno também é efetuado através de uma rotina já implementada
no application notes [18] e como o formato de entrada e saída de suas variáveis é o 1.15
nenhuma transformação de formatos é necessária.
4.5 CONTROLADOR DE CORRENTE
A implementação do controlador de corrente também utiliza-se do controlador
PI disponível no application notes do fabricante [18], bastando colocar o erro do sinal
como entrada e definir os valores das constantes de kp e ki do controlador, calculando-as
conforme orientado no mesmo.
Da mesma maneira que na obtenção das correntes de referência, a seqüência
da Figura 4.9 é executada para cada uma das fases.
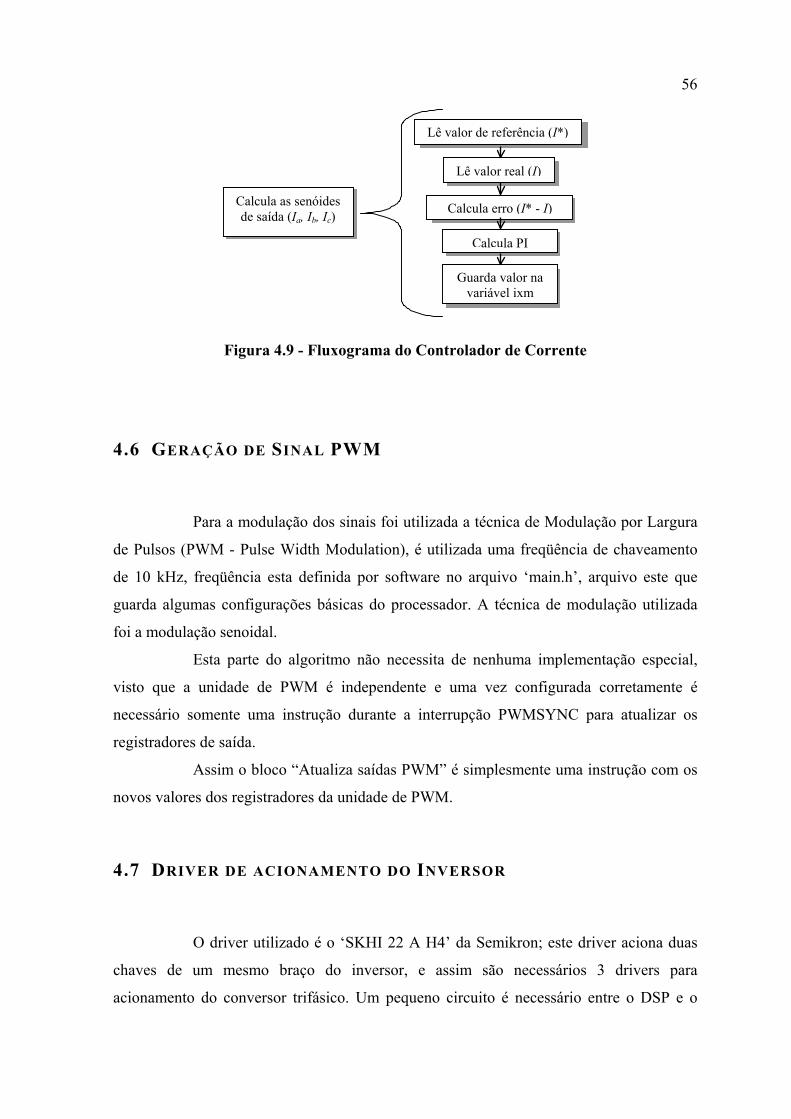
56
Calcula PI
Lê valor de referência (I*)
Lê valor real (I)
Calcula erro (I* - I)
Guarda valor na variável ixm
Calcula as senóides de saída (Ia, Ib, Ic)
Figura 4.9 - Fluxograma do Controlador de Corrente
4.6 GERAÇÃO DE SINAL PWM
Para a modulação dos sinais foi utilizada a técnica de Modulação por Largura
de Pulsos (PWM - Pulse Width Modulation), é utilizada uma freqüência de chaveamento
de 10 kHz, freqüência esta definida por software no arquivo ‘main.h’, arquivo este que
guarda algumas configurações básicas do processador. A técnica de modulação utilizada
foi a modulação senoidal.
Esta parte do algoritmo não necessita de nenhuma implementação especial,
visto que a unidade de PWM é independente e uma vez configurada corretamente é
necessário somente uma instrução durante a interrupção PWMSYNC para atualizar os
registradores de saída.
Assim o bloco “Atualiza saídas PWM” é simplesmente uma instrução com os
novos valores dos registradores da unidade de PWM.
4.7 DRIVER DE ACIONAMENTO DO INVERSOR
O driver utilizado é o ‘SKHI 22 A H4’ da Semikron; este driver aciona duas
chaves de um mesmo braço do inversor, e assim são necessários 3 drivers para
acionamento do conversor trifásico. Um pequeno circuito é necessário entre o DSP e o

57
conversor, pois a alimentação deste driver é em 15 V e as saídas PWM do DSP são em 5
V, para isso foi utilizado dois CIs IR2130, que faz essa conversão de tensão.
4.8 CONVERSOR PWM
O conversor utilizado possui três chaves IGBTs ‘SKM 75 GB 123 D’ da
Semikron, um link CC de 540V com 4 capacitores de 4700µF/400V, ligados dois em série
e paralelo, a potência total do conversor é de 11 kW. O conjunto driver/conversor foi
adquirido montado junto a Semikron do Brasil.
ωr ωr
Tacômetro
ia
ic
ib
CL
BL CH
BH AL
AH
ia ib ic
MIT
ConversorPWM
Conversor PWM
DSP ADMC401
Figura 4.10 – Sistema de Controle Vetorial Alternativo Digitalizado
Comparando o diagrama de bloco do sistema digitalizado, mostrado na Figura
4.10, com o diagrama de blocos do sistema híbrido, mostrado na Figura 3.4, percebe-se
uma grande diminuição no tamanho do sistema, já que o DSP substitui todos os blocos de
controle, desde o cálculo dos sinais de referência a geração dos sinais PWM.
Uma outra observação importante é que o sistema híbrido fez uso de dois
conversores, denominados de “mestre” e “escravo”, de modo que cada fase pudesse ser
controlada de forma totalmente independente. No presente projeto apresenta-se a situação
mais realista de apenas um conversor.

58
4.9 TEMPO TOTAL DE PROCESSAMENTO
O tempo total de processamento das operações é apresentado na Figura 4.1
elas são efetuados em aproximadamente 23,6µs, como pode ser observado na Figura 4.11.
Esta figura foi obtida setando uma das portas de propósito geral do DSP no início da
interrupção PWMSYNC, sendo a primeira instrução executada e resetando no final do
processo, como última instrução antes de retornar da interrupção.
23,6µs
Figura 4.11 – Tempo de Processamento do Sistema. Traço Superior: Pulso do PWMSYNC. Traço Inferior: Pulso Mostrando o Tempo de Processamento
Como pode-se observar no traço inferior da Figura 4.11, o tempo em que este
está alto representa o tempo de processamento do sistema. O traço superior mostra o pulso
de PWMSYNC que ocorre a cada 50µs e controla o início de operação de todas as funções
necessárias. Esse tempo de 50µs é o tempo de amostragem adotado. Um tempo de
amostragem de 25µs foi testado, porém o sistema não executava a função de parada do
sistema via computador. O tempo bastante curto de processamento se deve principalmente
ao processamento paralelo do sistema, visto que quando se inicia a interrupção, o
processador continua suas operações, e ao mesmo tempo faz-se a conversão nos
conversores Analógico/Digital, envia dados aos conversores Digital/Analógico, e monitora
as saídas PWM.

59
4.10 CONCLUSÃO
Foram apresentados neste capítulo as principais características do sistema
digitalizado, a estrutura do DSP, o algoritmo implementado e a estrutura de hardware
utilizado. No próximo capítulo são apresentados os resultados experimentais e de
simulação obtidos.

60
CAPÍTULO 5
RESULTADOS DE SIMULAÇÃO E EXPERIMENTAIS
Neste capítulo serão apresentados os resultados experimentais e de simulação
do sistema implementado. Os resultados de simulação são apresentados para uma
verificação da resposta esperada no sistema real. Todos os resultados foram obtidos com o
sistema sem carga. Abaixo são apresentados os resultados de partida e parada da máquina,
inversão de velocidade com as referências quadrada, triangular e senoidal. Uma resposta
utilizando o controle escalar, sem controle de fase, é apresentada para mostrar a diferença
do sistema de controle. Os resultados de simulação foram obtidos em um sistema
implementado no Matlab Simulink®. Os resultados experimentais foram obtidos com o
osciloscópio TDS460A da Tektronix.
5.1 ACELERAÇÃO E DESACELERAÇÃO DA MÁQUINA
Primeiramente apresenta-se os resultados de aceleração de 0 rpm até a
velocidade de referência. A Figura 5.1 mostra a variação de 0 rpm a 600 rpm. Em (a) é
apresentado a corrente de estator, e pode ser observado que no período de velocidade zero
a corrente possui uma freqüência bem baixa. A corrente deveria se manter contínua quando
o motor está com velocidade zero e sem carga, como observado nos resultados de
simulação da Figura 5.3. Isso ocorre devido a um ajuste no sinal de referência, que devido
ao gerador de funções usado nos experimentos não possui um ajuste fino da tensão, e assim
uma pequena tensão da ordem de poucos milivolts ainda faz o motor girar com velocidades
bem baixas.
Em (b) é apresentada a corrente iqs que se mantém saturada até o motor obter
uma velocidade bem próxima à velocidade de referência. A componente de conjugado (iqs)
sendo constante durante o período de aceleração garante um conjugado de aceleração
constante e, conseqüentemente um perfil de variação de velocidade retilíneo. A não
linearidade do perfil de velocidade nessa situação pode indicar parâmetro incorreto.

61
Observa-se ainda, nas Figura 5.1 (a) e (b) que a resposta à solicitação de
variação de velocidade é imediata, o que é esperado de um sistema de controle vetorial.
13,2A/div
3,3A/div
Referência de Velocidade
Referência de Velocidade 600rpm
Velocidade Real
Velocidade Real
Corrente na Máquina
Corrente iqs
Figura 5.1 – Referência de
Tra
600rpm
Figura 5.2 - VReferência de
Tra
A Fig
Em (a) é apresent
contínua, visto qu
(a) (b)
Variação de Velocidade de 0 a 600 rpm. Traço Superior: (a) e (b) Velocidade. Traço Central: (a) e (b) Velocidade Real da Máquina. ço Inferior: (a) Corrente do Estator (Ia), (b) Corrente iqs
13,2A/div
3,3A/div
Referência de Velocidade
Velocidade Real
Corrente iqs
Referência de Velocidade
Velocidade Real
Corrente na Máquina
(a) (b)
ariação de Velocidade de 600rpm a 0rpm. Traço Superior: (a) e (b) Velocidade. Traço Central: (a) e (b) Velocidade Real da Máquina. ço Inferior: (a)Corrente de Estator (Ia) e (b) Corrente iqs
ura 5.2 apresenta os resultados para uma variação de 600 rpm a 0 rpm.
ada a corrente da máquina, que após a parada do motor deveria se manter
e o motor não possui carga, mas o resultado apresenta uma freqüência

62
baixa como citado anteriormente. Em (b) é apresentada a corrente iqs, mostrando que ela
satura e se mantém em seu valor máximo até bem próximo da velocidade zero.
Observa-se do sinal de velocidade real, que a redução de velocidade ocorre de
forma retilínea, como esperado de um processo com conjugado constante, e que a etapa
final da desaceleração não apresenta qualquer oscilação, indicando que o sistema de
controle atende às exigências de resposta rápida e sem oscilações.
O conjugado de aceleração está em torno de 3,5 Nm, sendo o conjugado
nominal da máquina de 11,5 Nm. Optou-se por um valor reduzido de conjugado para
compensar a falta de inércia adicional no motor, já que os ensaios são em uma máquina de
3cv operando a vazio. Assim, para obter-se uma resposta de aceleração linear e sem
oscilações, como se espera de um sistema de controle vetorial, um ajuste dos controladores
de velocidade e de corrente foi feito. Para alguns valores de Kp e Ki nos controladores
obtém-se valores de conjugado de aceleração bem maiores, mas o sistema torna-se instável
a velocidades baixas e ocorre um sobre-sinal quando utilizado na inversão do sentido de
rotação.
(a) (b) (c) (d)
Figura 5.3 - Variação de Velocidade de 0 rpm a 600 rpm no Sistema Simulado. (a) Referência de Velocidade. (b) Velocidade Real da Máquina.
(c)Corrente de Estator (ias). (d) Corrente iqs

63
(a) (b) (c) (d)
Figura 5.4 - Variação de Velocidade de 600 rpm a 0 rpm no Sistema Simulado. (a) Referência de Velocidade. (b) Velocidade Real da Máquina.
(c)Corrente de Estator (ias). (d) Corrente iqs
Na Figura 5.3 e Figura 5.4 são apresentados resultados de simulação para uma
variação de velocidade de 0 rpm a 600 rpm e de 600 rpm a 0 rpm respectivamente. Em (a)
aparece a velocidade de referência, em (b) a velocidade real do motor, em (c) a corrente de
estator e em (d) a corrente iqs. Observa-se na corrente de estator que a mesma mantém-se
contínua no período de velocidade zero, que é o resultado esperado. Observa-se ainda na
corrente iqs, que ela se mantém no valor zero em todo o período de velocidade constante. A
corrente iqs satura no momento de variação de velocidade e volta ao valor zero quando
atinge a velocidade de regime.

64
Referência de Velocidade
Referência de Velocidade 300rpm
Velocidade Real
Velocidade Real
Corrente na Máquina
13,2A/div Corrente iqs
3,3A/div
(a) (b)
Figura 5.5 -Variação de Velocidade de 0 rpm a 300 rpm. Traço Superior: (a) e (b) Referência de Velocidade. Traço Central: (a) e (b) Velocidade Real da Máquina.
Traço Inferior: (a)Corrente de Estator (Ia) (b) Corrente iqs
13,2A/div
3,3A/div
Referência de Velocidade
Velocidade Real
Corrente iqs Corrente na Máquina
Velocidade Real
Referência de Velocidade 300rpm
Figura 5.6 - Variação de Velocidade de 300 rpm a 0 rpm. Traço Superior: (a) e (b) Referência de Velocidade. Traço Central: (a) e (b) Velocidade Real da Máquina.
Traço Inferior: (a)Corrente de Estator (Ia) e (b) Corrente iqs
(a) (b)
Na Figura 5.5 e Figura 5.6 os resultados mostram uma variação de velocidade
de 0 rpm a 300 rpm e de 300 rpm a 0 rpm, respectivamente. Como nos resultados
anteriores apresenta-se em (a) a corrente de estator e em (b) a corrente iqs. Aqui também
aparece o problema do ajuste para velocidade zero, como pode ser visto nas correntes de
estator, que apresentam uma pequena variação, por estarem em uma freqüência bem baixa.
O sinal de velocidade real indica novamente, como no caso anterior, que o
conjugado de aceleração e o conjugado de desaceleração são constantes, como esperado do

65
controle vetorial. Verifica-se ainda que não há oscilações há etapa final de variação de
velocidade.
Os valores de iqs mostrados foram obtidos da saída analógica do DSP, a qual
possui um offset de 2,5 V, pois ela varia de 0 a 5 V. Assim, quando iqs é nulo sua saída no
osciloscópio é de 2,5 V. Para a velocidade zero o valor de iqs se mantém em zero, como
esperado, já com o aumento da velocidade um valor de iqs aparece nos resultados isto se
deve em parte a uma compensação do atrito da máquina. Por outro lado, o valor observado
está acima do esperado, o que pode indicar ajuste inadequado em algum dos parâmetros do
sistema de controle.
Observa-se nos resultados acima alguns ruídos principalmente no sinal de
velocidade do motor. Estes ruídos se devem a uma interferência produzida pelo
chaveamento do conversor. Estes foram bastante amenizados após a inserção de
capacitores de desacoplamento nas fontes, utilização de cabos blindados nos sinais de
corrente e velocidade e distanciamento do motor do sistema de controle e medição.
5.2 RESULTADOS COM INVERSÃO DE VELOCIDADE
São apresentados nesta seção os resultados de inversão no sentido de rotação
da máquina. Para estes ensaios foram utilizados como sinais de referência de velocidade
uma onda quadrada, uma onda senoidal e uma onda triangular, com freqüência de 0,5 Hz.
A Figura 5.7 e Figura 5.8 apresentam uma variação de velocidade de –600
rpm a 600 rpm com uma referência quadrada. Na Figura 5.7 o traço inferior mostra a
corrente de estator da máquina e na Figura 5.8 o traço inferior mostra a corrente iqs.
Observa-se que com uma solicitação de inversão de velocidade, a resposta de velocidade
do motor também tem um perfil retilíneo, como esperado de um sistema de controle
vetorial.
A Figura 5.9 apresenta o resultado de simulação para uma variação de –600
rpm a 600 rpm com uma referência quadrada.

66
m
Figura 5.7 – Variação de Velocidade de -600rpQuadrada. Traço Superior: Referência de Velocid
Real da Máquina. Traço Inferior: C
Figura 5.8 - Variação de Velocidade de -600rpm a 6Traço Superior: Referência de Velocidade. Traç
Máquina. Traço Inferior: C
1200rp
3,3A/div
m a 600rpm com Referência ade. Traço Central: Velocidade orrente de Estator
m
1200rp13,2A/div
00rpm com Referência Quadrada. o Central: Velocidade Real da orrente iqs

67
(a) (b) (c) (d)
Figura 5.9 - Variação de Velocidade de –600rpm a 600rpm no Sistema Simulado. (a) Referência de Velocidade. (b) Velocidade Real da Máquina.
(c)Corrente de Estator (ias). (d) Corrente iqs
3,3A/div
Figura 5.10 – Variação de Velocidade de -600rpm a 600rpm com Referência Triangular. Traço Superior: Referência de Velocidade. Traço Central: Velocidade
Real da Máquina. Traço Inferior: Corrente de Estator
A Figura 5.10 apresenta uma variação de velocidade de –600 rpm a 600 rpm.
Seguindo a referência da onda triangular, observa-se que a velocidade real acompanha
fielmente o sinal de referência. A Figura 5.11 mostra a mesma variação de velocidade

68
agora seguindo uma onda senoidal como referência. A velocidade real acompanha o sinal
de referência.
3,3A/div
Figura 5.11 - Variação de Velocidade de -600rpm a 600rpm com Referência Senoidal. Traço Superior: Referência de Velocidade. Traço Central: Velocidade Real da
Máquina. Traço Inferior: Corrente de Estator
Como pode ser observado no sinal de corrente e de velocidade a transição pelo
zero acontece de forma suave e sem qualquer oscilação ou variação na velocidade, e uma
inversão na fase da corrente pode ser observada no respectivo sinal. Os resultados
esperados são apresentados na Figura 5.12 que apresenta os resultados de simulação para
uma referência triangular e senoidal.
Figura 5.12 – Reseg
(a) (b)
sultado Simulado de Variação de Velocidade de –600 a 600 rpm uindo uma referência (a) triangular e (b) senoidal
69
5.3 OPERAÇÃO DESSINTONIZADA
O que aqui é denominado de operação dessintonizada são resultados variando-
se a constante de tempo do rotor (τr), que em uma aplicação continuada normalmente
ocorre devido ao aquecimento da máquina e variações da temperatura ambiente, que
podem modificar o valor da resistência de rotor.
3,3A/div
Figura 5.13 – Variação de Velocidade de –600rpm a 600rpm com Referência Quadrada e constante de tempo (τr) 120% do valor real (156ms)
3,3A/div
Figura 5.14 – Variação de Velocidade de –600rpm a 600rpm com Referência Quadrada e constante de tempo (τr) 140% do valor real (182ms)

70
3,3A/div
Figura 5.15 – Variação de Velocidade de –600rpm a 600rpm com Referência Quadrada e constante de tempo (τr) 80% do valor real (104ms)
3,3A/div
Figura 5.16 – Variação de Velocidade de –600rpm a 600rpm com Referência Quadrada e constante de tempo (τr) 60% do valor real (78ms)
Os resultados foram obtidos variando o valor da constante de tempo do rotor
(τr) de 130ms. Assim foram obtidos resultados para τr igual a 120% (156 ms), 140%
(182 ms), 80%(104 ms) e 60%(78 ms) do valor nominal da constante de tempo, que podem
ser observados da Figura 5.13 a Figura 5.16, respectivamente. Para um valor de constante

71
de tempo acima do valor nominal (130 ms) observa-se que a resposta apresenta um
aumento da curvatura no sinal de velocidade.
5.4 RESULTADOS PARA OPERAÇÃO SEM ORIENTAÇÃO DE FLUXO
(CONTROLE ESCALAR)
Na presente seção apresenta-se alguns resultados sem o orientação de fluxo,
ou seja, um sistema de controle escalar. Para isso no bloco de cálculo da fase substitui-se o
valor calculado por zero, e assim durante o sistema de controle sempre é somado ao valor
da fase zero, ou seja nenhum controle na fase é feito.
Observa-se claramente na velocidade real da Figura 5.17 uma oscilação no
pico da onda triangular, quando o motor passa a diminuir a velocidade. Outra característica
bastante visível é o atraso na resposta de velocidade como pode ser visto na Figura 5.17,
onde aparecem as linhas pontilhadas na horizontal, inseridas para melhor visualização do
atraso.
A Figura 5.18 apresenta uma partida e uma parada do motor, observa-se
também um atraso na resposta de velocidade e uma pequena oscilação, melhor observado
na parada do motor.

72
3,3A/div
Figura 5.17 – Variação de Velocidade de –600rpm a 600rpm com Referência Triangular sem Orientação de Fluxo (Controle Escalar)
3,3A/div
Figura 5.18 - Variação de Velocidade de 600rpm a 0rpm e de 0 a 600rpm sem Orientação de Fluxo (Controle Escalar)
5.5 CONCLUSÃO
Neste capítulo foram apresentados os resultados experimentais e simulados
para a partida, parada e inversão de velocidade, esta inversão com referências quadrada,
senoidal e triangular.
73
CAPÍTULO 6
CONCLUSÃO GERAL
Para o desenvolvimento deste trabalho tomamos como objetivo principal a
implementação do sistema de controle vetorial alternativo, utilizando para isso um
Processador Digital de Sinais (DSP), que hoje é amplamente utilizado nas mais variadas
áreas da Engenharia Elétrica, quando o problema envolve processamento de sinais em alta
velocidade.
A utilização do DSP é necessária para uma diminuição do hardware necessário
para implementação; assim, todas as operações de controle foram executadas internamente
e implementadas por software. Esta implementação totalmente digital necessita de um bom
dimensionamento das variáveis do sistema, principalmente no ADMC401 que trabalha
com aritmética em ponto fixo. Vários problemas e dificuldades foram encontrados para
este correto dimensionamento, pela falta de conhecimento anterior deste tipo de sistema na
UFG.
Os resultados de aceleração, parada e inversão de velocidade mostram a
eficácia do sistema produzindo uma resposta de velocidade linear e sem oscilações. Os
resultados de variação seguindo uma referência triangular e senoidal mostram a boa
resposta dinâmica do sistema com uma referência que varia continuamente. Os resultados
com controle escalar (sem controle de fase) mostram a importância desta parte do controle
no sistema.
Os resultados obtidos podem ser melhorados com um ajuste mais preciso dos
controladores de corrente e velocidade, melhorando o conjugado da máquina, que apesar
de uma resposta de velocidade linear, o conjugado ainda se mostra pequeno se comparado
ao conjugado nominal do motor. Este conjugado de aceleração foi mantido pequeno com
estes ajustes nos controladores devido à pequena inércia do motor.
Este sistema aqui implementado pode ser melhorado com a utilização de um
encoder digital para obter o sinal de velocidade. Para o sinal de velocidade o encoder não
foi utilizado devido a um atraso na entrega pelo fornecedor fazendo com este estivesse
disponível somente quando alguns resultados já estavam sendo obtidos com o tacômetro
analógico utilizado.

74
Como trabalho futuro sugere-se o desenvolvimento de um estimador de
velocidade substituindo a malha física de realimentação de velocidade, obtendo o que se
encontra no mercado como controle vetorial sem sensor de velocidade ou “sensorless”. E
ainda a realização de testes dinâmicos com carga.
75
REFERÊNCIAS BIBLIOGRÁFICAS:
1. J.W.L. Nerys, "An Alternative Implementation of Vector Control for Induction Motors," PhD Thesis, Department of Electronic and Electrical Engineering, The University of Leeds, Leeds, UK, October, 1999.
2. D. A. de Andrade, "Dynamic Control of Inverter-Fed Cage Induction Motors," Ph.D. Thesis, Department of Electronic and Electrical Engineering, The University of Leeds, April 1994.
3. J.W.L. Nerys, A. Hughes and J. Corda, “Alternative Implementation of Vector Control for Induction Motor and its Experimental Evaluation,” IEE Proc.-Eletr. Power Appl. Vol. 147, No. 1, January 2000.
4. A. Hughes, J. Corda, and D.A. Andrade, "Vector Control of Cage Induction Motors: a Physical Insight", IEE Proc. – Electr. Power Appl., vol 143, n.1, Jan 1996, pp. 59-68.
5. R. W. De Doncker and D. W. Novotny, “The Universal Field Oriented Controller,” IEEE Trans. on Ind. Appl., vol. 30, n. 1, Jan/Feb 1994, pp. 92-99.
6. N. Mohan, “Physical Understanding of Vector-Control for Induction Motors Drivers”, Fourteenth Annual Applied Power Eletronics Conference, Texas USA, March 1999.
7. D. W. Novotny and T.A Lipo, “Vector Control and Dynamics of AC Drives”, Clarendon Press, Oxford, 1996.
8. F. Blaschke, “The Principle of Field Orientation as Applied to the New TRANSVECKTOR Closed-Loop Control System for Rotanting-Field Machines”, Siemens Review XXXIX, n.5 1972, pp 217-20.
9. E. B. Vuono, “Uma Contribuição ao Estudo de Controle de Alto Desempenho de Motores de Indução Trifásicos”, Dissertação de Mestrado, Unicamp, Brasil, Janeiro de 1997.
10. Hérnandes, J. R., “Implementação Digital Utilizando DSP do Controle por Orientação do Fluxo do Rotor: Métodos Direto e Indireto”, Dissertação de Mestrado, Unicamp, Brasil, Maio de 1999.
11. J.W.L. Nerys and A.S. Steindorff, “Dynamic Performance of Induction Motors driven by Alternative Method of Vector Control”, 6th Brazilian Power Electronics Conference, Florianópolis, SC – Brazil, November 2001, Vol. 2, pp. 816-820.
12. R. Gabriel, W. Leonard ande C. J. Nordby, “Field-Oriented Control of Standard AC Motor Using Microprocessors”, IEEE Trans. On Ind. Appl., vol IA-16, nº 2, Mar-Apr 1980, pp186-92.

76
13. W. Leonard, “Field-Orientation for Controlling ac-machines – principles and applications – A Tutorial,” Proc. 3rd Conf. In Power Electronics and Variable – Speed Drives, London, 1988, pp. 277-82.
14. P. Krause, “Method of Multiple Reference Frames Applied to the Analysis of Symmetrical Induction Machinery,” IEEE Trans. On Power Apparatus and Systems, PAS-87, nº 1, Jan 1968, pp. 218-27.
15. P. C. Krause and C. H. Thomas, “Analysis of Electric Machinery” McGraw Hill Book Company, 1986.
16. ADSP-2100 Family User’s Manual, Analog Devices, Third Edition, September 1995.
17. ADSP-2100 - Assembler Tools & Simulator Manual, Analog Devices, Second Edition, November 1994.
18. Motor Control Embedded DSP Solutions – Application Notes ADMC401, Analog Devices, 2000.
19. Single-Chip, DSP-Based High Performance Motor Controller – Datasheets ADMC401, Analog Devices, 2000.

77
ANEXO A
Dados do Motor de Indução
A.1. Dados de Placa
Tensão Nominal: 220V/380V
Freqüência: 60 Hz
Potência: 3cv
Velocidade Nominal: 1730rpm
Corrente Nominal: 8,7A/5,04A
Momento de Inércia: 0,00673 kgm2
Fator de Potência: 0,8
Rendimento: 83%
A.2. Dados obtidos dos ensaios a Ensaio a Vazio e com Rotor Bloqueado
Resistência de Estator: 2,45Ω
Resistência de Rotor: 1,7Ω
Indutância de Magnetização: 203,37mH
Indutância de Estator: 207,34mH
Indutância de Rotor: 221mH

78
ANEXO B Cópia do Artigo apresentado ao 6º COBEP – Congresso Brasileiro de Eletrônica de Potência

79

80

81

82

83
ANEXO C Código Fonte em Assembler do Programa Implementado (Arquivo Main.dsp) .MODULE/RAM/SEG=USER_PM1/ABS=0x60 Main_Test; ********************************************************************* * * * Aplicação: Sistema de Controle Vetorial Alternativo * * * * Arquivo: main.dsp * * * * Descrição: Sistema de Controle Vetorial Alternativo Digitalizado * * * * * * * * Author : Asley Stecca Steindorff * * Version : 1.0 * * Date : Fevereiro 2003 * * Modification History: Versão Final * * * * Grupo PEQ * * Universidade Federal de Goiás * ********************************************************************* ********************************************************************* * Include General System Parameters and Libraries * ********************************************************************* #include <main.h>; #include <pwm401.h>; #include <dac401.h>; #include <adc401.h>; #include <trigono.h>; #include <mathfun.h>; #include <pi.h>; #include <ir_reset.h>; #include <lowpass.h>; ******************** *********************************************** Routines Defined in Trigonometrics functions ******************************************************************** ******************************************************************** Constants Defined ******************************************************************** .CONST wr = 0x3000; .CONST TwoPiOverThree = 0xffff/3; .CONST T_tau = 0x075f; .CONST inv_id = 0x4f03; .CONST ids_2 = 0x053f; .CONST tsp = 0x0117;
84
********************************************************************* Local Variables ********************************************************************* .VAR/DM/RAM/SEG=USER_DM1 ws; .INIT ws : 0x0000; .VAR/DM/RAM/SEG=USER_DM1 ws_ant; .INIT ws_ant : 0x0000; .VAR/DM/RAM/SEG=USER_DM1 wrm; .INIT wrm : 0x0000; .VAR/DM/RAM/SEG=USER_DM1 iqs; .INIT iqs : 0x0000; .VAR/DM/RAM/SEG=USER_DM1 wsl; .INIT wsl : 0x0000; .VAR/DM/RAM/SEG=USER_DM1 wrr; .INIT wrr : 0x0000; .VAR/DM/RAM/SEG=USER_DM1 razao; .INIT razao : 0x0000; .VAR/DM/RAM/SEG=USER_DM1 Theta; .INIT Theta : 0x0000; .VAR/DM/RAM/SEG=USER_DM1 raiz; .INIT raiz : 0x0000; .VAR/DM/RAM/SEG=USER_DM1 Tan_1; .INIT Tan_1 : 0x0000; .VAR/DM/RAM/SEG=USER_DM1 iam; .INIT iam: 0x0000; .VAR/DM/RAM/SEG=USER_DM1 ibm; .INIT ibm: 0x0000; .VAR/DM/RAM/SEG=USER_DM1 icm; .INIT icm: 0x0000; .VAR/DM/RAM/SEG=USER_DM1 AD_IN; .INIT AD_IN : 0x2000; .VAR/DM/RAM/SEG=USER_DM1 erro; .INIT erro : 0x0000; .VAR/DM/RAM/SEG=USER_DM1 VrefA; .VAR/DM/RAM/SEG=USER_DM1 VrefB; .VAR/DM/RAM/SEG=USER_DM1 VrefC; .INIT VrefA : 0x0000; .INIT VrefB : 0x0000; .INIT VrefC : 0x0000; ------------------- for 16 bit PI controller ------------------------ #define PI_SF160 0
85
.VAR/RAM/PM/CIRC/SEG=USER_PM1 PI_Coef160[3];
.INIT PI_Coef160: 0xcdea00, 0x7fff00, 0x2c8500; .VAR/RAM/DM/CIRC/SEG=USER_DM1 PI_Delay160[2]; .INIT PI_Delay160: 0x0000, 0x0000; ------------------- for 16 bit PI controller (ia)-------------------- #define PI_SF161 0 .VAR/RAM/PM/CIRC/SEG=USER_PM1 PI_Coef161[3]; .INIT PI_Coef161: 0xa86c00, 0x7fff00, 0x1af200; .VAR/RAM/DM/CIRC/SEG=USER_DM1 PI_Delay161[2]; .INIT PI_Delay161: 0x0000, 0x0000; ------------------- for 16 bit PI controller (ib)-------------------- #define PI_SF162 0 .VAR/RAM/PM/CIRC/SEG=USER_PM2 PI_Coef162[3]; .INIT PI_Coef162: 0xa86c00, 0x7fff00, 0x1af200; .VAR/RAM/DM/CIRC/SEG=USER_DM2 PI_Delay162[2]; .INIT PI_Delay162: 0x0000, 0x0000; ------------------- for 16 bit PI controller (ic)-------------------- #define PI_SF16 0 .VAR/RAM/PM/CIRC/SEG=USER_PM2 PI_Coef16[3]; .INIT PI_Coef16: 0xa86c00, 0x7fff00, 0x1af200; .VAR/RAM/DM/CIRC/SEG=USER_DM2 PI_Delay16[2]; .INIT PI_Delay16: 0x0000, 0x0000; ------------------- for 16 bit precision lowpass filter ------------- .VAR/RAM/PM/CIRC/SEG=USER_PM1 Filter_1st_Coef[1*3]; .INIT Filter_1st_Coef: 0x01fa00, 0x01fa00, 0x7c0a00; .VAR/RAM/DM/CIRC/SEG=USER_DM1 Filter_1st_Delay[1*2]; .INIT Filter_1st_Delay: 0x0000, 0x0000; *********************************************************************** Start of program code *********************************************************************** Startup: IR_reset_PIO3; PWM_Init(PWMSYNC_ISR, PWMTRIP_ISR);
set_Bit_DM(MODECTRL,6); IFC = 0x80; ay0 = 0x200; ar = IMASK; ar = ar or ay0; IMASK = ar; ADC_Init; DAC_Init;

86
INIT_PI16(PI_Delay160, 0x0000); INIT_PI16(PI_Delay161, 0x0000); INIT_PI16(PI_Delay162, 0x0000); INIT_PI16(PI_Delay16, 0x0000); MainLoop: nop; jump MainLoop; rts; ********************************************************************* PWM Interrupt Service Routine ********************************************************************* PWMSYNC_ISR: AR = 0xfff; DM(PIODIR) = AR; AR = 0x001; DM(PIODATA) = AR; Set_DAG_registers_for_trigonometric; Set_DAG_registers_for_math_function; DAC_Pause; ADC_Read(ADC0,Offset_0to3); dm(iam) = ar; ADC_Read(ADC1,Offset_0to3); dm(ibm) = ar; ADC_Read(ADC2,Offset_0to3); dm(icm) = ar; ADC_Read(ADC4,Offset_4to7); dm(wrr) = ar; ADC_Read(ADC5,Offset_4to7); ay0 = 0x0a40; ar = ar - ay0; dm(wrm) = ar; ********************************************************************** PI para iqs ********************************************************************** ax0 = dm(wrr); ay0 = dm(wrm); ena AR_SAT; ar = ax0 - ay0; dis AR_SAT; my0 = 0xffff; mr = ar * my0 (SU); if MV SAT mr; ar = mr1; mr = ar * my0 (SU); if MV SAT mr;

87
ar = mr1; mr = ar * my0 (SU); if MV SAT mr; ar = mr1; mr = ar * my0 (SU); if MV SAT mr; ar = mr1; mr = ar * my0 (SU); if MV SAT mr; ar = mr1; dm(erro) = ar; Pi16(PI_Delay160, PI_Coef160, PI_SF160);
dm(iqs) = sr1; *********************************************************************** Cálculo da Raiz Quadrada *********************************************************************** mr = 0; mx0 = dm(iqs); mr1 = ids_2; mr = mr + mx0 * mx0 (SS); sr = lshift mr1 by 1 (lo); Square_Root(sr1,sr0); sr = lshift sr1 by 7 (hi); DM(raiz)=sr1; *********************************************************************** Cálculo do Arco Tangente *********************************************************************** mr = 0; mx0 = dm(iqs); my0 = inv_id; mr = mx0 * my0 (ss); dm(razao) = mr1; ay0 = 0x8000; af = mr1 and ay0; ar = abs mr1; sr = lshift ar by 4 (lo); ar = sr1 or af; sr1 = ar; Atan(sr1,sr0); DM(Tan_1) = AR; *********************************************************************** Cálculo do escorregamento *********************************************************************** mr = 0; mx1 = dm(razao); my1 = T_tau; mr = mx1 * my1 (ss); dm(wsl) = mr1; ********************************************************************** Cálculo da velocidade síncrona **********************************************************************

88
ax0 = dm(ws); dm(ws_ant) = ax0; ay1 = dm(wrm); ax1 = dm(wsl); ena AR_SAT; ar = ax1 + ay1; dis AR_SAT; dm(ws) = ar; ********************************************************************** Cálculo do ângulo Theta ********************************************************************** mr = 0; ay0 = dm(ws_ant); ar = ar + ay0; my1 = 0x4000; mr = ar * my1 (ss); mx0 = mr1; my0 = tsp; mr = 0; mr = mx0 * my0 (ss); ay1 = dm(theta); ax1 = mr1; ar = ax1 + ay1; dm(theta) = ar; ar = dm(iqs); my1 = 0x6666; mr = ar * my1 (ss); dm(iqs) = mr1; ********************************************************************** Cálculo das senóides ********************************************************************** mr = 0; ax0 = dm(Theta); ay0 = dm(Tan_1); ar = ax0 + ay0; sin(ar); my0 = dm(raiz); mr = ar * my0 (ss); dm(VrefA) = mr1; ax0 = dm(Theta); ay0 = dm(Tan_1); ar = ax0 + ay0; ay1 = TwoPioverThree; ar = ar - ay1; sin(ar); mr = ar * my0 (SS); dm(VrefB) = mr1; ax0 = dm(Theta); ay0 = dm(Tan_1); ar = ax0 + ay0; ay1 = TwoPioverThree; ar = ar + ay1;

89
sin(ar); mr = ar * my0 (SS); dm(VrefC) = mr1; ********************************************************************** PI para ia ********************************************************************** ax0 = dm(VrefA); ay0 = dm(iam); ena AR_SAT; ar = ax0 - ay0; dis AR_SAT; Pi16(PI_Delay161, PI_Coef161, PI_SF161);
dm(iam) = sr1; ********************************************************************* PI para ib ********************************************************************* ax0 = dm(VrefB); ay0 = dm(ibm); ena AR_SAT; ar = ax0 - ay0; dis AR_SAT; Pi16(PI_Delay162, PI_Coef162, PI_SF162);
dm(ibm) = sr1; ********************************************************************** PI para ic ********************************************************************** ax0 = dm(VrefC); ay0 = dm(icm); ena AR_SAT; ar = ax0 - ay0; dis AR_SAT; Pi16(PI_Delay16, PI_Coef16, PI_SF16);
dm(icm) = sr1; ********************************************************************** Atualiza saídas PWM ********************************************************************** DAC_Resume; ax0 = DM(iam); ax1 = DM(ibm); ay0 = DM(icm); PWM_update_demanded_Voltage(ax0,ax1,ay0); my0 = DM(iam); DAC_Put(1, my0); my0 = DM(ibm); DAC_Put(2, my0); my0 = DM(icm); DAC_Put(3, my0); my1 = dm(Theta); DAC_Put(4,my1); my0 = DM(VrefA); DAC_Put(5, my0); my0 = DM(VrefB); DAC_Put(6, my0); my0 = DM(VrefC); DAC_Put(7, my0);

90
my0 = DM(iqs); DAC_Put(8, my0); DAC_Update; AR = 0x00; DM(PIODATA) = AR; rti; *********************************************************************** PWM Trip Interrupt Service Routine *********************************************************************** PWMTRIP_ISR: Test_Bit_DM(SYSSTAT,0); If_Set_Jump(RESTART_PWM); CNTR = H#3FF ; DO Wait0 UNTIL CE; Wait0: NOP; Test_Bit_DM(SYSSTAT,0); If_Set_Jump(RESTART_PWM); DIS SEC_REG; rti; *********************************************************************** After a shutdown - restart the PWM. *********************************************************************** RESTART_PWM: cntr = H#3FF ; do Wait20 until ce; Wait20: NOP; IFC = 0X80; PWM_Init(PWMSYNC_ISR, PWMTRIP_ISR); rti; .ENDMOD;



![Hardware 1 Processador [Modo de Compatibilidade]ricardojcsouza.com.br/download/Hardware_1_Processador6.pdf · Barramento Utilitários para análise do processador CPU - Processador](https://img.document.onl/doc/110x75/5f7f34fa7313195a5657f356/hardware-1-processador-modo-de-compatibilidade-barramento-utilitrios-para-anlise.jpg)