Embed Size (px)
Citation preview

1
RAPHAEL PEREIRA MATTAR
VINÍCIUS MANHÃES GABRIEL DE BRITO CAVALCANTI
PROJETO DE SISTEMA DE CONTROLE ÓTIMO E SIMULAÇÃO DE VÔO DE UM
QUADRICÓPTERO
Monografia apresentada ao Instituto
Federal de Educação, Ciência e
Tecnologia Fluminense como
requisito parcial para conclusão do
curso de Bacharelado em Engenharia
de Controle e Automação.
Orientador: Edson Simões dos Santos
CAMPOS DOS GOYTACAZES - RJ
2014

2
RAPHAEL PEREIRA MATTAR
VINÍCIUS MANHÃES GABRIEL DE BRITO CAVALCANTI
PROJETO DE SISTEMA DE CONTROLE ÓTIMO E SIMULAÇÃO DE VÔO DE UM
QUADRICÓPTERO
Monografia apresentada ao Instituto Federal de
Educação, Ciência e Tecnologia Fluminense como
requisito parcial para conclusão do curso de
Bacharelado em Engenharia de Controle e
Automação.
Orientador: Edson Simões dos Santos.
Aprovada em 04/12/214
Banca Avaliadora:
_____________________________________________________________
Prof° Edson Simões dos Santos
Mestre em Pesquisa Operacional e Inteligência Computacional - UCAM
Instituto Federal Fluminense
________________________________________________________________
Prof° Adelson Siqueira Carvalho
Doutor em Informática na Educação - UFGS
Instituto Federal Fluminense
________________________________________________________________
Profa Valéria Rodrigues Valle
Bacharel em Engenharia de Controle e Automação - IFF
Instituto Federal Fluminense

3
Raphael agradece:
Quero agradecer, em primeiro lugar, а
Deus, pela força е coragem durante esta
longa caminhada.
Aos familiares e amigos pelo apoio
incondicional durante toda a minha vida.
Ao meu orientador Edson Simões pela sua
energia, correções е incentivos.
À Instituição pelo ambiente criativo е
amigável qυе proporciona.
Vinícius agradece:
Ao orientador Edson Simões pela
compreensão e suporte que foram
fundamentais para a concretização deste
trabalho.
Aos familiares e amigos pelo apoio e
incentivo nos momentos difíceis ao longo
da vida.
Em especial ao amigo Otávio Santos pelas
contribuições e parceria nas fases iniciais
de desenvolvimento deste projeto.
Ao IFF pelo ambiente proporcionado
durante toda a graduação.

4
“O que sabemos é uma gota, o que
ignoramos é um oceano.”
(Isaac Asimov)
“Quanto mais nos elevamos, menores
parecemos aos olhos daqueles que não
sabem voar.”
(Friedrich Nietzsche)

5
RESUMO
A teoria de controle ótimo lida com sistemas dinâmicos a um custo mínimo, no qual o
sistema é definido por um conjunto de equações diferenciais lineares e o custo é
descrito por uma função quadrática. Estas caraterísticas tornam a classe de
controladores ótimos interessante para projetos que visem ampliar e melhorar a
performance do sistema com menor custo possível. O objetivo deste estudo é projetar
e simular um sistema baseado em técnicas de modelagem em espaço de estados e
controle ótimo, sendo este robusto a perturbações e ruídos proveniente dos sensores,
para um quadricóptero. O projeto apresenta prototipagem em Computer-Aided Design
(CAD) para levantamento de parâmetros físicos. Este trabalho apresenta a
representação em espaço de estados do sistema não-linear e também sua forma
linear, que será utilizada para o projeto do controlador. O modelo é invariante no
tempo. A estratégia de controle a ser adotada é o Controlador Linear Quadrático
Gaussiano (LQG). As variáveis de saída estimadas são utilizadas para simulação
dinâmica em ambiente virtual. O sistema de controle implementado
computacionalmente atendeu as condições de distúrbio e ruído, limitações físicas dos
motores, e restrições das variáveis de estado.
PALAVRAS CHAVE: Controle Ótimo, LQG, Simulação Virtual, Quadricóptero.

6
ABSTRACT
The optimal control theory is concerned with dynamic systems at minimum cost, where
the system is defined by a set of linear differential equations and the cost is described
by a quadratic function. Those features render the class of optimal controllers
interesting in projects aiming to extend and improve the system’s performance at
minimum cost. This study’s objective is to design and simulate a quadcopter in state
space representation with optimal control regulation robust to process and
measurement noises. The project shows a prototype in Computer-Aided Design
(CAD). This work shows the state space representation for the non-linear system and
its linear form as well, using the last one for the controller design. The model is time
invariant. The chosen control strategy is the Linear Quadratic Gaussian (LQG)
Controller. The estimated output states will be used for dynamic simulation in virtual
world. The implemented control system achieved the noise, motors and state
constraints.
KEYWORDS: Optimal Control, LQG, Virtual Simulation, Quadcopter.

7
LISTA DE FIGURAS
Figura 1: Helicóptero de Leonardo da Vinci 12
Figura 2: Gyroplane No. 1 12
Figura 3: Treinamento de Linker 13
Figura 4: FSTD (Flight Simulation Training Device) Moderno 14
Figura 5: Aeryon Scout 14
Figura 6: Parrot AR.Drone 15
Figura 7: Figura representativa dos seis graus de liberdade do sistema 18
Figura 8: Barra de ferramentas do SolidWorks 19
Figura 9: Controlador LQG e planta com ruído 22
Figura 10: Função de transferência do controlador LQG 23
Figura 11: Diagrama de divisão do Capítulo 3 26
Figura 12: Modelo 3D do Quadricóptero 26
Figura 13: Modelo 3D do Quadricóptero após a inserção de Câmera 27
Figura 14: Sistema de coordenadas 29
Figura 15: Modelo em Simulink 35
Figura 16: Subsistema de referências 36
Figura 17: Subsistema motores 36
Figura 18: Subsistema Dinâmica do Quadricóptero 37
Figura 19: Subsistema Sensores 37
Figura 20: Subsistema Vetor de Estados 38
Figura 21: Resposta ao degrau unitário da velocidade linear no eixo z 38
Figura 22: Saídas do controlador em resposta ao degrau unitário 39
Figura 23: Deslocamento vertical em resposta ao degrau unitário 40
Figura 24: Deslocamento vertical em resposta ao novo sinal de referência 40
Figura 25: Subsistema de simulação 3D 41
Figura 26: V-Realm Builder 42
Figura 27: Parâmetros do Bloco VR Sink 42
Figura 28: Deslocamento linear no eixo x 43
Figura 29: Velocidade linear no eixo x 44
Figura 30: Deslocamento linear no eixo y 44

8
Figura 31: Velocidade linear no eixo y 45
Figura 32: Deslocamento linear no eixo z 45
Figura 33: Velocidade linear no eixo z 46
Figura 34: Deslocamento angular no eixo x 46
Figura 35: Velocidade angular no eixo x 47
Figura 36: Deslocamento angular no eixo y 48
Figura 37: Velocidade angular no eixo y 48
Figura 38: Deslocamento angular no eixo z 49
Figura 39: Velocidade angular no eixo z 49
Figura 40: Restrições das variáveis 50

9
LISTA DE SIGLAS
CAD Computer-Aided Design
GRASP General Robotics, Automation, Sensing and Perception
IMU Inertial Measurement Unit
LQE Linear Quadradic Estimator
LQG Linear Quadradic Gaussian
LQR Linear Quadradic Regulator
LTI Linear Time Invariant
MIMO Multiple Input Multiple Output
MIT Massachusetts Institute of Technology
PID Proportinal-Integral-Derivative
VANT Veículo Aéreo Não Tripulado
VR Virtual Reality
VRML Virtual Reality Modeling Language
VTOL Vertical Take-Off and Landing

10
SUMÁRIO
Introdução 12
1.1 OBJETIVO 15
1.1.1 Objetivo Geral 15
1.1.2 Objetivos Específicos 16
1.2 JUSTIFICATIVA 16
1.3 ESTADO DA ARTE 17
1.4 CONTRIBUIÇÕES DESTE TRABALHO 17
CAPÍTULO 2 – MÉTODOS E FERRAMENTAS 19
2.1 DESENHO ASSISTIDO POR COMPUTADOR 19
2.2 CONTROLE ÓTIMO 20
2.2.1 Realimentação de Estados Ótima 21
2.2.2 Estimativa Ótima de Estados 21
2.2.3 Controlador Linear Quadrático Gaussiano 22
2.3 PRINCÍPIOS DE MODELAGEM DA DINÂMICA DE AERONAVES 23
2.4 PRINCÍPIOS E METODOLOGIA DE SIMULAÇÃO 23
CAPÍTULO 3 – DESENVOLVIMENTO 26
3.1 PROJETO EM CAD 26
3.1.1 Criação do Modelo 3D 27
3.1.2 Características Construtivas 28
3.2 MODELO MATEMÁTICO DO QUADRICÓPTERO 29
3.2.1 Representação em Espaço de Estados do Protótipo 32
3.3 PROJETO DE CONTROLE ÓTIMO 32
3.3.1 Adição Pólos na Origem 33
3.3.2 Verificação de Observabilidade e Controlabilidade 33
3.3.3 Projeto de um Estimador Quadrático Linear 34
3.3.4 Projeto de um Regulador Quadrático Linear 34
3.3.5 Controlador Ótimo 34
3.4 SIMULAÇÃO MATEMÁTICA 35
3.5 SIMULAÇÃO EM AMBIENTE VIRTUAL 41
11
CAPÍTULO 4 – RESULTADOS E DICUSSÕES 43
CAPÍTULO 5 – CONSIDERAÇÕES FINAIS 51
5.1 CONCLUSÃO 51
5.2 SUGESTÕES PARA TRABALHOS FUTUROS 51
REFERÊNCIAS BIBLIOGRÁFICAS 52
APÊNDICE I 54

12
INTRODUÇÃO
Ao longo da história o homem sempre expressou sua fascinação pelo voo,
tanto quanto existem vários registros de tentativas mal sucedidas de realizar tal feito.
A primeira tentativa de se projetar um meio de transporte voador é creditada a
Leonardo Da Vinci em 1493 (BOUABDALLAH, 2007).
Figura 1: Helicóptero de Leonardo da Vinci
Fonte: <wikipedia.org> Acesso em: Outubro de 2014
A palavra helicóptero, porém, só foi empregada pela primeira vez por Gustave
Ponton d’Amécourt em 1861 ao unir duas palavras de origem grega, helix e pteron,
que significam, correspondentemente, espiral e asa. Porém seu invento, movido a
vapor, nunca levantou voo. Em 1878, o veículo de Enrico Forlanini foi o primeiro deste
tipo a levantar voo, alcançando 12 metros e pairando por 12 segundos
(BOUABDALLAH, 2007).
Em 1906, os irmãos Jacques e Louis Breguet projetaram o Gyroplane No.1,
possivelmente o primeiro exemplo de quadricóptero, um helicóptero multi-rotor
propulsionado por quatro motores. O voo do Gyroplane No.1 é considerado o primeiro
voo livre tripulado (BOUABDALLAH, 2007).
Figura 2: Gyroplane No. 1
Fonte: <www.intechopen.com> Acesso em: Outubro de 2014

13
Allerton (2009) descreve que o início das simulações de vôo se deu no início
do século XX, quando o movimento do cockpit era controlado pelos instrutores em
resposta às ações do piloto. Durante a Primeira Guerra Mundial o treinamento se
estabeleceu em aeronaves de dois assentos, nesta configuração o instrutor
demonstrava manobras que eram praticadas pelos alunos até se chegar a um padrão
satisfatório. Nos anos 20, Edward Link, que é reconhecido como o fundador da
simulação de voo moderna desenvolveu um dispositivo de treinamento de voo,
usando ar comprimido para inclinar o cockpit e replicar medições dos instrumentos da
aeronave.
Figura 3: Treinamento de Linker
Fonte: Allerton, 2009
Ainda segundo o mesmo o autor, os sistemas de controle evoluíram durante
a Segunda Guerra Mundial, devido a necessidade de se estabilizar aeronaves e
navios com servomecanismos. No centro disto estavam o desenvolvimento dos
amplificadores operacionais. Na aeronáutica os computadores analógicos eram
utilizados para modelar as equações de movimento das aeronaves como um conjunto
de equações diferenciais não-lineares, dando a oportunidade de projetistas
desenvolverem sistemas de controle avançado em laboratório. Com o advento da
computação digital e avanço na velocidade de processamento, produtores de
simuladores puderam aplicar esse tipo de tecnologia para desenvolvimento de
sistemas visuais. Com a popularização dos PC’s e os avanços em tecnologia de
videogames, companhias de simulação puderam explorar as capacidades de geração
de imagem com circuitos integrados, assim como a tecnologia de atuadores
hidráulicos avançou já era possível fornecer uma sensação de vôo bastante realística.
14
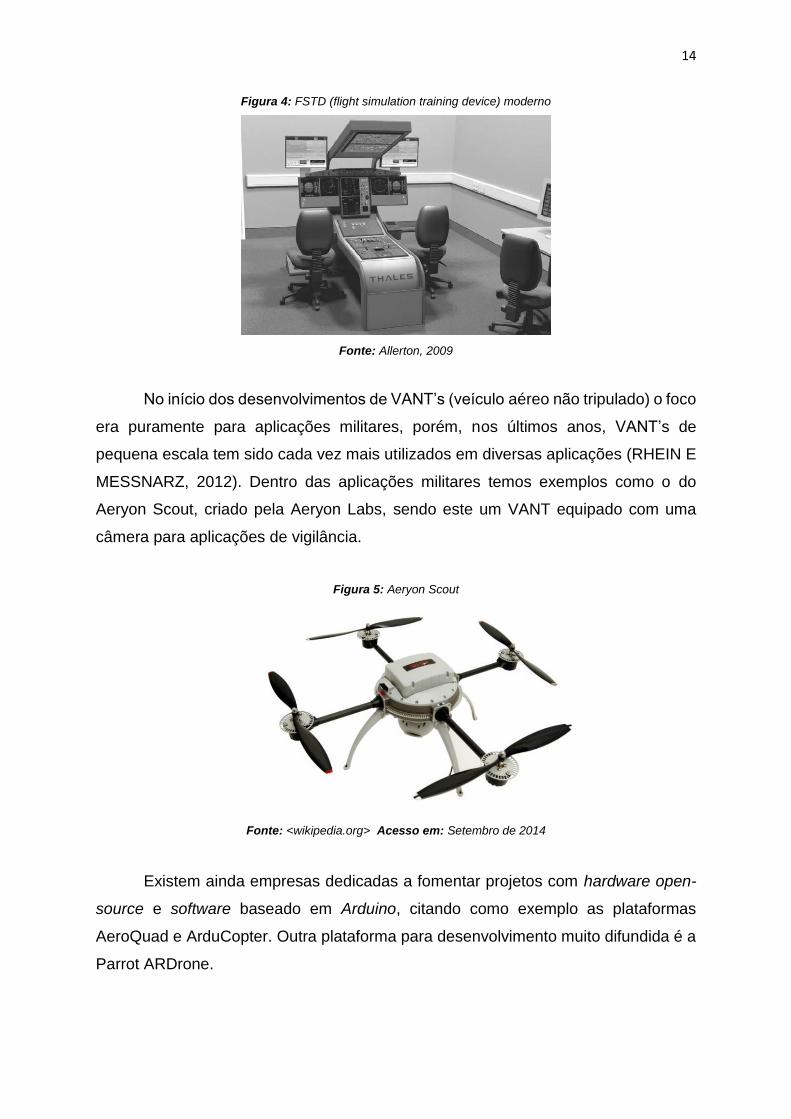
Figura 4: FSTD (flight simulation training device) moderno
Fonte: Allerton, 2009
No início dos desenvolvimentos de VANT’s (veículo aéreo não tripulado) o foco
era puramente para aplicações militares, porém, nos últimos anos, VANT’s de
pequena escala tem sido cada vez mais utilizados em diversas aplicações (RHEIN E
MESSNARZ, 2012). Dentro das aplicações militares temos exemplos como o do
Aeryon Scout, criado pela Aeryon Labs, sendo este um VANT equipado com uma
câmera para aplicações de vigilância.
Figura 5: Aeryon Scout
Fonte: <wikipedia.org> Acesso em: Setembro de 2014
Existem ainda empresas dedicadas a fomentar projetos com hardware open-
source e software baseado em Arduino, citando como exemplo as plataformas
AeroQuad e ArduCopter. Outra plataforma para desenvolvimento muito difundida é a
Parrot ARDrone.

15
Figura 6: Parrot AR.Drone
Fonte: <wikipedia.org> Acesso em: Setembro de 2014
Além dessas empresas, laboratórios com renome mundial como o Laboratório
de Controle Aerospacial do MIT e o Laboratório GRASP (General Robotics,
Automation, Sensing and Perception) da Universidade da Pensilvânia, que buscam
técnicas mais avançadas de controle e aplicações para quadricópteros.
Segundo Skogestad e Postlethwaite (2005) o controle ótimo, baseado no
trabalho realizado por Winter nos anos 40 sobre o filtro ótimo, chegou a maturidade
nos anos 60 com o que é chamado atualmente de controle LQG. Seu
desenvolvimento se deu por conta dos programas espaciais desenvolvidos pelos
Estados Unidos da América e União Soviética para solucionar problemas como, por
exemplo, manobras de foguetes com o uso mínimo de combustível (que pode ser
definido como um problema de otimização).
Neste trabalho desenvolve-se um algoritmo de controle completo de estados,
para as variáveis de estado deslocamentos lineares, velocidades lineares, posições
angulares e velocidade angulares, que obedeçam aos seguintes critérios de robustez
a ruídos, a distúrbios no processo, bom desempenho no rastreamento da referência
com custo otimizado de energia.
1.1 OBJETIVO
1.1.1 Objetivo Geral
Projetar e simular um sistema baseado em técnicas de modelagem em espaço
de estados e controle ótimo, sendo este robusto a perturbações e ruídos proveniente
dos sensores.

16
1.1.2 Objetivos Específicos
Os objetivos intermediários abrangem:
Modelagem matemática do quadroicóptero e linearização do mesmo;
Prototipagem em CAD (Desenho Assistido por Computador) visando colher os
parâmetros mecânicos reais do modelo proposto;
Avaliação do desempenho do sistema controlador/quadricóptero através da
ferramenta Simulink;
Simulação 3D com auxílio da biblioteca Simulink 3D Animation.
1.2 JUSTIFICATIVA
Uma das classes de VANT é o quadricóptero, que possui uma configuração
com quatro rotores, sendo este uma ferramenta útil para testar e avaliar teorias de
controle de voo. Dentre as vantagens para a utilização de um quadricóptero como
plataforma de teste pode ser apontado que este possui: custo baixo, variedade de
tamanhos, concepção mecânica simples e versatilidade.
Os drones, como também são conhecidos, atualmente são utilizados para
aplicações tanto militares quanto civis. Aplicações militares compreendem vigilância
e reconhecimento, missões de busca e salvamento. As aplicações civis se
concentram, em sua maioria, em captação de imagens aéreas. A indústria
cinematográfica e a de agricultura têm mostrado grande interesse neste tipo de
aplicação. Em 2013 a amazon.com, maior empresa de comércio eletrônico do
ambiente, anunciou que pretende investir em pesquisa de drones a fim de utilizá-los
para entregas de produtos leves. Já em 2014 a amazon.com está desenvolvendo
seu nono protótipo.
Portanto pode ser identificado uma demanda de projetos que visem ampliar e
melhorar as habilidades de um veículo aéreo não tripulado em realizar manobras e
pairar no ar, com obtenção de menor custo em seu deslocamento.

17
1.3 ESTADO DA ARTE
O estado da arte em sistema de controle para quadricópteros tem mudado
bastante nos últimos anos, assim como o número de projetos tem aumentado
consideravelmente. A maioria dos projetos consiste em modificações de
quadricópteros comerciais visando aprimoramento do mesmo.
Joyo et al. (2013) apresentam uma sintonia de controlador, para o sistema
linearizado, a partir da técnica PID para posicionamento horizontal e vertical de um
VANT sob efeito de turbulência.
Al-Omari et al. (2013) utilizam da mesma técnica, porém para o sistema não
linear. A estrutura constitui de seis PID’s. Os ângulos de roll e pitch são gerados a
partir das posições Y e X, respectivamente, num controle do tipo cascata, enquanto o
ângulo de yaw e a posição Z estão em paralelo. Para os mesmos estados Alexis et
al. (2012) utilizam controle preditivo. Além destes seis estados, Voos (2009), projeta
estabilidade para os três estados de velocidade angular. O autor desenvolve um
controlador por linearização na realimentação para controle não-linear
Argentim et al. (2013) utilizam PID, LQR e PID-LQR para controle de posição
e velocidade no eixo z. Se aproximando mais do controle ótimo Jeong et al. (2012)
utilizam controle H-infinito para controle de attitude com dinâmica não-linear e
incertezas. Liu et al. (2013) também desenvolve um controle de attitude, porém com
controlador LQR.
Dentro da técnica que será utilizada neste trabalho, Rhein e Messnarz (2012)
desenvolvem um controle robusto para a variável altura. Já Nuchkrua e Parnichkun
(2012) desenvolvem o mesmo tipo de controlador para attitude.
1.4 CONTRIBUIÇÕES DESTE TRABALHO
A proposta deste trabalho é projetar um controle ótimo de voo para um veículo
aéreo não tripulado da classe quadricóptero. Diferentemente dos trabalhos expostos
neste capítulo, que simplificam a estrutura da representação em espaço de estados
ao diminuírem os graus de liberdade do sistema ou ignorarem os estados de taxa de
variação dos erros, o modelo que será aqui exposto deverá atender as referências
dos doze estados do modelo matemático:

18
Deslocamento linear no eixo X (Back/Forward)
Taxa de variação linear no eixo X
Deslocamento linear no eixo Y (Left/Right)
Taxa de variação linear no eixo Y
Deslocamento linear no eixo Z (Up/Down)
Taxa de variação linear no eixo Z
Deslocamento angular no eixo X (Roll)
Taxa de variação angular no eixo X
Deslocamento angular no eixo Y (Pitch)
Taxa de variação angular no eixo Y
Deslocamento angular no eixo Z (Yaw)
Taxa de variação angular no eixo Z
Figura 7: Figura representativa dos seis graus de liberdade do sistema
Fonte: <wikipedia.org> Acesso em: Novembro de 2014

19
CAPÍTULO 2 – MÉTODOS E FERRAMENTAS
O procedimento adotado neste trabalho de conclusão de curso foi: obter as
equações linearizadas que descrevam o comportamento do sistema, representa-las
em espaço de estados, obter os parâmetros de um modelo em CAD, projetar um
controlador ótimo para o sistema encontrado e simular o sistema controlado com as
ferramentas computacionais disponíveis.
O modelo desenvolvido neste trabalho assume que:
A estrutura e hélices são rígidas;
O centro de gravidade e a origem do sistema de coordenadas são
coincidentes;
O sistema é passivo de deslocamentos angulares próximos de zero;
O sistema de aquisição de dados é do tipo IMU (Inertial Measurement Unit),
sendo possível coletar dados de todas as variáveis de estado;
Não há leitura negativa do deslocamento no eixo z;
2.1 DESENHO ASSISTIDO POR COMPUTADOR
O Desenho Assistido por Computador é o nome genérico dado a sistemas
computacionais utilizados em diversas áreas de conhecimento para facilitar e auxiliar
o desenvolvimento de projetos de desenho em três dimensões através de diversas
ferramentas. Dentre os vários recursos utilizados durante a criação do modelo 3D,
utilizando o software SolidWorks, destacam-se abaixo:
Figura 8: Barra de ferramentas do SolidWorks
Fonte: Próprios autores

20
Sketch: para a criação de formas geométricas em 2D sobre um plano ou
sobre uma das faces de um objeto existente;
Trim Enteties: para deletar ou cortar linhas;
Convert Entities: copia uma ou mais curvas (arestas, contornos de faces e
outras entidades visíveis) para o esboço atual pela sua projeção no plano
do esboço;
Offset Entities: são usadas para criar cópias de arestas de modelo em um
sketch, sendo estas afastadas das originais por algum valor específico;
Mirror Entities: o espelhamento é usado para criação de geometrias
simétricas através de uma centerline;
Linear/Circular Pattern: copia features em um padrão dimensional sendo
este linear ou circular;
Extruded Boss/Base: extrusão das formas geométricas 2D geradas sobre
um plano ou sobre uma das faces de um sólido;
Extruded Cut: corte feito a partir de formas geométricas 2D construídas
sobre a face de um objeto;
Fillet: usado para arredondar "quinas" em sólidos já existentes;
Flex: usado para torcer um objeto;
Shell: transforma um sólido em uma casca (caixa);
Mate: usado durante a composição de um assembly (montagem) para criar
relações que alinham e ajustam um ou mais componentes;
2.2 CONTROLE ÓTIMO
Segundo Skogestad e Postlethwaite (2005) no controle LQG é assumido que
a dinâmica da planta seja conhecida e linear, e que os ruídos de medida e distúrbios
sejam estocásticos com propriedades estatísticas conhecidas. Assim sendo, temos o
modelo:
{�� = 𝐴𝑥 + 𝐵𝑢 + 𝑤𝑑𝑦 = 𝐶𝑥 + 𝑤𝑛

21
Onde 𝑤𝑑 é o distúrbio e 𝑤𝑛 é o ruído. Estes são gaussianos, de média zero,
sem correlação e com matrizes de densidade espectral W e V, respectivamente.
Assim sendo, o controle LQG é definido como o controle ótimo u(t) que minimiza:
𝐽 = 𝐸 { lim𝑇→∞
1
𝑇∫ [𝑥𝑇𝑄𝑥 + 𝑢𝑇𝑅𝑢]𝑑𝑡𝑇
0
}
Onde Q e R são matrizes de peso apropriadamente escolhidas (parâmetros de
projeto) para otimização de erro e energia respectivamente, tal que Q=QT≥0 e R=RT>
0. A solução para este problema, conhecido como Teorema de Separação, consiste
em determinar: uma solução ótima para o problema determinístico de regulação linear
quadrática e uma estimação ótima para os estados.
2.2.1 Realimentação de Estados Ótima
Ainda segundo os mesmos autores, para um sistema dinâmico �� = 𝐴𝑥 + 𝐵𝑢
com lei de realimentação 𝑢 = −𝐾𝑥 o projeto do regulador consiste em achar uma
matriz K que minimize a função de custo:
𝐽 = ∫ (𝑥𝑇𝑄𝑥 + 𝑢𝑇𝑅𝑢)𝑑𝑡∞
0
A solução ótima para lei de realimentação é K=R-1BTX, onde X é a solução
algébrica da equação de Riccati:
𝐴𝑇𝑋 + 𝑋𝐴 − 𝑋𝐵𝑅−1𝐵𝑇𝑋 + 𝑄 = 0
2.2.2 Estimativa Ótima de Estados
Prosseguindo na literatura citada acima, considerando o sistema contínuo
abaixo:
{�� = 𝐴𝑥 + 𝐵𝑢 + 𝐺𝑤
𝑦 = 𝐶𝑥 + 𝐷𝑢 + 𝐻𝑤 + 𝑣

22
Em que, w é o ruído branco no vetor de estados e v é o ruído branco no vetor
de saídas, ambos gaussianos, de média nula e não correlacionados entre si.
A dinâmica do estimador é dada por:
�� = 𝐴�� + 𝐵𝑢 + 𝐿(𝑦 − 𝐶��)
𝑒 = 𝑥 − ��
O projeto do estimador consiste em achar uma matriz L ótima, ou seja, que
minimiza o erro médio quadrático da estimativa.
𝐽 = 𝐸{[𝑥 − ��]𝑇[𝑥 − ��]}
2.2.3 Controlador Linear Quadrático Gaussiano
Os autores referenciados anteriormente concluem que, ao se combinar o LQR
e o LQE obtem-se a estrutura a seguir:
Figura 9: Controlador LQG e planta com ruído
Fonte: Skogestad e Postlethwaite, 2005
Assim sendo a função de transferência do controlador LQG é dado de acordo
com a imagem da figura 10:

23
Figura 10: Função de transferência do controlador LQG
Fonte: Skogestad e Postlethwaite, 2005
2.3 PRINCÍPIOS DE MODELAGEM DA DINÂMICA DE AERONAVES
Os princípios de mecânica de corpos rígidos e fluídos foram estabelecidos por
Newton, Bernouilli, Euler, Lagrange e Laplace e então aplicadas na dinâmica de
aeronaves formulando equações diferenciais que descrevem por completo seu
comportamento (ALLERTON, 2009).
A orientação da aeronave pode ser definida apartir do seu frame, fornecendo
sua attitude que é dada por três ângulos ϕ (roll), θ (pitch) e ψ (yaw). Esses ângulos
também são conhecidos como ângulos de Euler.
Quartenions são amplamente usados em simulações de voo. Eles possibilitam
que os ângulos de Euler sejam computados evitando singularidade computacional.
Essas singularidades ocorrem quando θ=±𝜋
2. Os quatro parâmetros 𝑒0, 𝑒1, 𝑒2 e 𝑒3 são
definidos em termos dos ângulos de Euler (ϕ, θ e ψ) como se segue:
𝑒0 = cos𝜓
2cos
𝜃
2cos
𝜙
2+ sin
𝜓
2sin
𝜃
2sin
𝜙
2
𝑒1 = cos𝜓
2cos
𝜃
2sin
𝜙
2− sin
𝜓
2sin
𝜃
2cos
𝜙
2
𝑒2 = cos𝜓
2sin
𝜃
2cos
𝜙
2+ sin
𝜓
2cos
𝜃
2sin
𝜙
2
𝑒3 = sin𝜓
2cos
𝜃
2cos
𝜙
2− cos
𝜓
2sin
𝜃
2sin
𝜙
2
2.4 PRINCÍPIOS E METODOLOGIA DE SIMULAÇÃO
Linguagens de programação possibilitaram traduzir um algoritmo para um
código executável. Geralmente, o principal critério para o software é que produza
saídas corretas com uma precisão definida. Contudo, existe uma classe conhecida
como real-time softwares, em que adicionalmente a precisão o software deve
computar seus resultados dentro de um tempo específico (ALLERTON, 2009).

24
O tempo de execução depende de vários fatores:
Arquitetura do processador, principalmente o ciclo de clock para extrair,
decodificar e executar instruções;
A complexidade do algoritmo;
A eficiência do processo de compilação para traduzir descrições em alto-
nível para linguagem de máquina;
Qualquer atraso em adquirir entradas para o algoritmo ou transmitir saídas,
principalmente dados que serão lidos ou escritos via interface de hardware;
A simulação permite explorar o dimensionamento dos equipamentos e
componentes do processo, estudar interações de várias partes do processo, melhorar
o entendimento do processo, investigando seu comportamento sem os gastos com a
operação do processo real e sem os eventuais riscos envolvidos nessa atividade e
selecionar ajustes de controladores ou projetar leis de controle (CLAUDIO GARCIA,
2009).
Para tais propósitos foi utilizado o Simulink, que é um ambiente de diagrama
de blocos para simulação multi-domínio e projeto baseado em modelo. Ele suporta
projeto de sistemas, simulação, geração de código automático e teste contínuo e
verificação de sistemas embutidos. Ele fornece editor gráfico, bibliotecas de blocos
personalizáveis e solucionadores de modelagem e simulação de sistemas dinâmicos.
É integrado com MATLAB, permitindo-lhe incorporar algoritmos em modelos e
exportar os resultados da simulação para análise posterior.
A toolbox de realidade virtual é uma solução para interação de modelos
dinâmicos ao longo do tempo. Esta toolbox estende as capacidades do Simulink e
MATLAB, permitindo:
Criação de ambientes virtuais tridimensionais usando os padrões de VRML
(Virtual Reality Modeling Language). O VRML é um formato padrão de
arquivo para representações tridimensionais. Tais arquivos possuem
extensão .wrl;
Criar e definir dinâmicas com o MATLAB e Simulink;
Observar animações dirigidas por sinais do ambiente Simulink;
Mudar a posição e propriedades de objetos em ambiente virtual de acordo
com a simulação;
25
Existem diversas configurações de voo. Neste trabalho será assumido que tal
configuração será VTOL (vertical take-off and landing) que possui uma habilidade
única para voos verticais, estacionários e de baixa velocidade, além de simplicidade
de controle. Estas características são essenciais para aplicações críticas como
vigilância aérea, como observado em Bouabdallah (2007).

26
CAPÍTULO 3 – DESENVOLVIMENTO
O diagrama hierárquico abaixo descreve as etapas que compõem este
capítulo, sendo dividido em cinco partes principais:
Figura 11: Diagrama de divisão do Capítulo 3
Fonte: Próprios autores
3.1 PROJETO EM CAD
O primeiro passo deste projeto foi a criação do modelo 3D do quadricóptero
em um software de Desenho Assistido por Computador (CAD - Computer-Aided
Design). Utilizando o software SolidWorks desenvolvido pela Dassault Systèmes
SolidWorks Corp., foi possível a criação de um modelo virtual com medidas próximas
das quais seriam utilizadas na criação de um modelo real.
Figura 12: Modelo 3D do Quadricóptero
Fonte: Próprios autores

27
O SolidWorks foi escolhido como software de criação do modelo 3D devido a
dois principais fatores: facilidade em poder importar o modelo 3D desenvolvido com
formato .wrl (compatível com o software MATLAB) no Simulink; conhecimento que os
autores possuem em relação aos demais CAD softwares.
Deste modo, foi possível a realização da simulação no ambiente Simulink
tornando desnecessário o uso de algum outro software para gerar a simulação,
simplificando o projeto.
3.1.1 Criação do Modelo 3D
O modelo 3D do veículo não tripulado é composto por três diferentes partes:
frame, motores e hélices.
A armação do quadricóptero (frame) é composta por uma "caixa central", onde
serão inseridos a placa microcontrolada, bateria e demais circuitos internos, e quatro
eixos (conectados a “caixa central”) onde estarão localizados os quatro motores.
Cada eixo do quadricóptero possui um “pé” de apoio fazendo com que a base do
dispositivo mantenha uma distâcia de 9.25 cm em relação ao solo. Esta distância
entre o dispositivo e o solo pode ser utilizada para, por exemplo, a instalação de uma
câmera na base da “caixa central”. Para todo o frame foi escolhido como material o
Hexcel 3000 filamentos sendo este, uma fibra de carbono. Podemos observar na
figura a seguir a instalação de uma Câmera GoPro Hero 3 Black Edition (modelo 3D
encontrado no website GrabCAD) acoplada a base do quadricóptero.
Figura 13: Modelo 3D do Quadricóptero após a inserção de Câmera
Fonte: Próprios autores

28
Os motores e hélices criados neste modelo 3D estão localizados no final de
cada eixo e possuem, como material construtivo o Alumínio e PVC rígido
respectivamente.
Neste processo foram utilizados, principalmete, os seguintes recursos:
Sketch;
Trim Enteties;
Convert Entities;
Offset Entities;
Mirror Entities;
Linear/Circular Pattern;
Extruded Boss/Base;
Extruded Cut;
Fillet;
Flex;
Shell;
Mate;
3.1.2 Características Construtivas
Concluído o Modelo 3D, através do SolidWorks, é possivel obter as
características do modelo de acordo com material usado para a construção do
suposto modelo real. Os materias utilizados no modelo 3D (frame, bateria de lítio e
placa microcontrolada), fazem parte de uma lista de materias do software e foram
definidos pelos autores. A partir da escolha do material e da determinação da
envergadura foram obtidos através do SolidWorks parâmetros e características
construtivas do modelo, observado na Tabela 1.
Tabela 1: Caracteristicas do Quadricóptero
Densidade do Hexcel AS4C 0.00178 Kg/cm³
Densidade do Alumínio 2024-T4 0.00278 Kg/cm³
Densidade do PVC rígido 0.0013 Kg/cm³
Área de Superfície (quadricóptero) 0.5788 m²
Volume (quadricóptero) 0.002245 m³

29
Envergadura (y) 0.98 m
Envergadura (x) 0.98 m
Massa do Quadricóptero 4.4325 Kg
Centro de Massa (x) -0.00069488 m
Centro de Massa (y) 0.03924390 m
Centro de Massa (z) 0.00090736 m
Momento de Inércia (Ixx) 0.11305391 m
Momento de Inércia (Iyx) -0.00006356 m
Momento de Inércia (Izx) 0.00029731 m
Momento de Inércia (Ixy) -0.00006356 m
Momento de Inércia (Iyy) 0.19592094 m
Momento de Inércia (Izy) 0.00028867 m
Momento de Inércia (Ixz) 0.00029731 m
Momento de Inércia (Iyz) 0.00028867 m
Momento de Inércia (Izz) 0.11348942 m
3.2 MODELO MATEMÁTICO DO QUADRICÓPTERO
Apartir do sistema de coordenadas abaixo:
Figura 14: Sistema de coordenadas
Fonte: Bouabdallah, 2007

30
Bouabdallah (2007), utilizando o formalismo de Newton-Euler, chega ao
conjunto de equações não-lineares que representam por completo a dinâmica do
sistema proposto:
Equações de movimento
{
𝐼𝑥𝑥�� = ����(𝐼𝑦𝑦 − 𝐼𝑧𝑧) + 𝐽𝑅��𝛺𝑅 + 𝑙𝜏𝑥
𝐼𝑦𝑦�� = ����(𝐼𝑧𝑧 − 𝐼𝑥𝑥) + 𝐽𝑅��𝛺𝑅 + 𝑙𝜏𝑦
𝐼𝑧𝑧�� = ����(𝐼𝑥𝑥 − 𝐼𝑦𝑦) + 𝐽𝑅𝛺�� + 𝜏𝑧𝑚�� = 𝑚𝑔 − (cos𝜙 cos 𝜃)𝑈
𝑚�� = (cos𝜙 sin 𝜃 cos𝜓 + sin𝜙 sin𝜓)𝑈𝑚�� = (cos𝜙 sin 𝜃 sin𝜓 − sin𝜙 cos𝜓)𝑈
O movimento do quadricóptero se dá ao variar a velocidade dos quatro motores
nele presente de forma combinada de acordo com o tipo de movimento a ser
realizado. Segundo Bouabdallah (2007), o sistema de equações que representa o
movimento deste sistema pode ser descrito como:
Equações de empuxo
{
𝜏𝑥 = 𝑏(−𝛺2
2 + 𝛺42)
𝜏𝑦 = 𝑏(−𝛺12 + 𝛺3
2)
𝜏𝑧 = 𝑑(−𝛺12 + 𝛺2
2 − 𝛺32 + 𝛺4
2)
𝑈 = 𝑏(𝛺12 + 𝛺2
2 + 𝛺32 + 𝛺4
2)
Mais detalhes quanto a formulação das equações de movimento e outros
aspectos aerodinâmicos podem ser verificados em Allerton (2009).
Dentro da classe de controladores ótimos, optou-se pelos reguladores lineares
por sua simplicidade. Naidu (2003) mostra que para este tipo de problema a lei de
controle ótimo pode ser encontrada como uma representação linear, variante ou
invariante no tempo do sistema de estados.
Neste projeto será considerado um sistema LTI (Linear Time Invariant). Assim
sendo, lineariza-se as equações de movimento do quadricóptero para pequenos
ângulos. Obtendo-se:

31
{
�� =
𝑙
𝐼𝑥𝑥𝜏𝑥
�� = 𝑙
𝐼𝑦𝑦𝜏𝑦
�� = 𝜏𝑧𝐼𝑧𝑧
�� = 𝑔 −𝑈
𝑚�� = 𝜃𝑔�� = −𝜑𝑔
A partir das equações de movimento acima, é evidente que as equações do
veículo representam um sistema de múltiplas entradas e múltiplas saídas (MIMO),
onde o vetor de estado pode ser descrito como:
x(t)=[𝑥 �� 𝑦 �� 𝑧 �� 𝜙 �� 𝜃 𝜃 𝜓 ��]𝑇
E de acordo com as equações de empuxo o vetor de entrada escolhido é
representado da seguinte forma:
u(t)=[𝑈 𝜏𝑥 𝜏𝑦 𝜏𝑧]𝑇
A representação em espaço de estados do quadricóptero, então, é dada da
seguinte forma:
{�� = 𝐴𝑥 + 𝐵𝑢𝑦 = 𝐶𝑥 + 𝐷𝑢
[ ��𝑥𝑦𝑦𝑧𝑧��
𝜙
𝜃𝜃𝜓
��
]
=
[ 0 1 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 𝑔 0 0 00 0 0 1 0 0 0 0 0 0 0 00 0 0 0 0 0 −𝑔 0 0 0 0 00 0 0 0 0 1 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 1 0 0 0 00 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 1 0 00 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 10 0 0 0 0 0 0 0 0 0 0 0]
[ 𝑥��𝑦��𝑧��𝜙
��𝜃𝜃
𝜓
��]
+
[
0 0 0 00 0 0 00 0 0 00 0 0 00 0 0 0
−1/𝑚 0 0 00 0 0 00 𝑙/𝐼𝑥 0 00 0 0 00 0 𝑙/𝐼𝑦 0
0 0 0 00 0 0 1/𝐼𝑧]
[
𝑈 𝜏𝑥𝜏𝑦𝜏𝑧
]

32
[ 𝑥��𝑦��𝑧��𝜙
��𝜃𝜃
𝜓
��]
=
[ 1 0 0 0 0 0 0 0 0 0 0 00 1 0 0 0 0 0 0 0 0 0 00 0 1 0 0 0 0 0 0 0 0 00 0 0 1 0 0 0 0 0 0 0 00 0 0 0 1 0 0 0 0 0 0 00 0 0 0 0 1 0 0 0 0 0 00 0 0 0 0 0 1 0 0 0 0 00 0 0 0 0 0 0 1 0 0 0 00 0 0 0 0 0 0 0 1 0 0 00 0 0 0 0 0 0 0 0 1 0 00 0 0 0 0 0 0 0 0 0 1 00 0 0 0 0 0 0 0 0 0 0 1]
[ 𝑥��𝑦��𝑧��𝜙
��𝜃𝜃
𝜓
��]
3.2.1 Representação em Espaço de Estados do Protótipo
Utilizando os parâmetros discutidos no tópico 3.1.2 na representação em
espaço de estados do tópico anterior, tem-se a seguinte representação:
[ ��𝑥𝑦𝑦𝑧𝑧��
𝜙
𝜃𝜃𝜓
��
]
=
[ 0 1 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 9.81 0 0 00 0 0 1 0 0 0 0 0 0 0 00 0 0 0 0 0 −9.81 0 0 0 0 00 0 0 0 0 1 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 1 0 0 0 00 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 1 0 00 0 0 0 0 0 0 0 0 0 0 00 0 0 0 0 0 0 0 0 0 0 10 0 0 0 0 0 0 0 0 0 0 0]
[ 𝑥��𝑦��𝑧��𝜙
��𝜃𝜃
𝜓
��]
+
[
0 0 0 00 0 0 00 0 0 00 0 0 00 0 0 0
−0.226 0 0 00 0 0 00 8.67 0 00 0 0 00 0 5 00 0 0 00 0 0 8.85]
[
𝑈 𝜏𝑥𝜏𝑦𝜏𝑧
]
[ 𝑥��𝑦��𝑧��𝜙
��𝜃𝜃
𝜓
��]
=
[ 1 0 0 0 0 0 0 0 0 0 0 00 1 0 0 0 0 0 0 0 0 0 00 0 1 0 0 0 0 0 0 0 0 00 0 0 1 0 0 0 0 0 0 0 00 0 0 0 1 0 0 0 0 0 0 00 0 0 0 0 1 0 0 0 0 0 00 0 0 0 0 0 1 0 0 0 0 00 0 0 0 0 0 0 1 0 0 0 00 0 0 0 0 0 0 0 1 0 0 00 0 0 0 0 0 0 0 0 1 0 00 0 0 0 0 0 0 0 0 0 1 00 0 0 0 0 0 0 0 0 0 0 1]
[ 𝑥��𝑦��𝑧��𝜙
��𝜃𝜃
𝜓
��]
3.3 PROJETO DE CONTROLE ÓTIMO
Seguindo a metodologia de Skogestad e Postlethwait (2005), o controlador
LQG (Linear Quadratic Gaussian) consiste da simples combinação de um estimador
quadrático linear (LQE) e um regulador quadrático linear (LQR). Portanto, uma vez

33
estabelecida a dinâmica, os próximos passos consistem em verificar que as
condições de observabilidade e controlabilidade, e requisito de resposta em regime
permanente sejam satisfeitas, para então projetar o LQE e o LQR.
3.3.1 Adição Pólos na Origem
É possível incluir matematicamente pólos na origem e garantir que o erro em
regime permanente para entradas em degrau seja nulo. Com isso, para o projeto de
controle, deve-se utilizar o modelo de sistema aumentado descrito por Maia Jr. (2007),
como se segue (onde o índice i refere-se as matrizes após a inclusão do pólo na
origem):
𝐴𝑖 = [0 0𝐵 𝐴
]
𝐵𝑖 = [𝐼0]
𝐶𝑖 = [0 𝐶]
No modelo foram adicionados dois pólos na origem, para compensar o erro em
regime permanente em resposta ao degrau e a força da gravidade que não pode ser
controlada e atua constantemente no sistema.
3.3.2 Verificação de Observabilidade e Controlabilidade
Em posse do modelo matemático acima é necessário, para o projeto de um
controlador ótimo, a verificação de controlabilidade e observabilidade onde ambas as
condições devem ser completas. Essas condições podem ser facilmente verificadas
utilizando as funções:
ctrb: retorna a matriz de controlabilidade do sistema em espaço de estados;
obsv: retorna a matriz de observabilidade do sistema em espaço de
estados;
rank: retorna o número de colunas ou linhas linearmente independentes de
uma matriz cheia;

34
Com o código que se encontra no Apêndice I verifica-se que ambas as matrizes
possuem posto 20. Isso quer dizer que a matriz de controlabilidade tem todas as
linhas linearmente independentes e que a matriz de observabilidade tem todas as
colunas linearmente independentes.
3.3.3 Projeto de um Estimador Quadrático Linear
A função lqe, com a sintaxe [L,M,E] = lqe(A,G,C,W,V), retorna a matriz de
ganho L de forma que produza uma estimativa ótima �� dos estados x
(www.mathworks.com, acesso em setembro de 2014).
Para o projeto de LQE os parâmetros escolhidos foram: W=0.01*eye(20) e
V=0.01*eye(12) a critério dos autores. Pela extensão da matriz a resposta obtida não
foi incluída no corpo do texto, mas pode ser verificada a partir do código que se
encontra no Apêndice I.
3.3.4 Projeto de um Regulador Quadrático Linear
A função lqr, com a sintaxe [K,S,E] = lqr(A,B,Q,R), retorna a matriz de ganho
K, de forma que para um sistema contínuo, a lei de controle minimize a função de
custo, tornando-a ótima (www.mathworks.com, acesso em setembro de 2014).
Para o projeto de LQR os parâmetros de otimização escolhidos foram:
R=0.0001*eye(4) e Q escolhido a partir de Q=CTC, com alterações nos pesos
referentes aos estados de deslocamento e velocidade lineares no eixo z para 108, a
escolha de Q e R ficaram a critério dos autores. Pela extensão da matriz a resposta
obtida não foi incluída no corpo do texto, mas pode ser verificada a partir do código
que se encontra no Apêndice I.
3.3.5 Controlador Ótimo
Utilizando as matrizes L e K obtidas nos tópicos 3.3.3 e 3.3.4, respectivamente,
e arquitetura discutida no tópico 2.2.3, a representação do controlador é dada pelas
matrizes: Ak, Bk e Ck. Pela extensão das matrizes, que representam o espaço de
estados do controlador, a resposta obtida não foi inclusa no corpo do texto, mas pode
ser verificada a partir do código que se encontra no Apêndice I.

35
3.4 SIMULAÇÃO MATEMÁTICA
Utilizando o código que se encontra no Apêndice I e o modelo dinâmico
desenvolvido no Simulink, representado abaixo, é possível analisar a resposta do
sistema a partir do plano de voo definido no início da simulação como entrada.
Figura 15: Modelo em Simulink
Fonte: Próprios autores
A Figura 16 apresenta os sinais de referência para as 12 variáveis de estado
do sistema. Como deseja-se um sistema com movimentação suave optou-se para
que as referências de velocidade linear nos eixos x, y e z fossem nulas. Também
optou-se por referências nulas nas 6 variáveis de estado angulares para que o
sistema respondesse o mais estável possível. Assim sendo, as referências de posição
nos eixos x, y e z são as referências que possuem parâmetros alteráveis de acordo
com os requisitos de navegação.
36
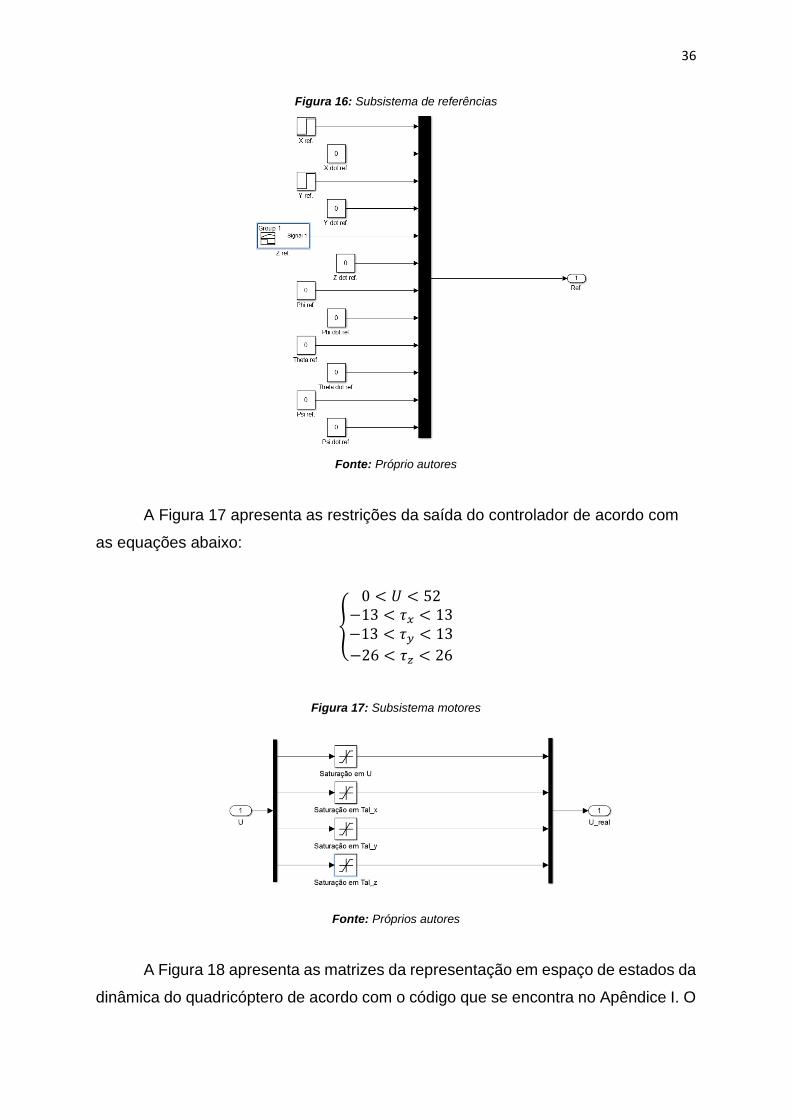
Figura 16: Subsistema de referências
Fonte: Próprio autores
A Figura 17 apresenta as restrições da saída do controlador de acordo com
as equações abaixo:
{
0 < 𝑈 < 52−13 < 𝜏𝑥 < 13−13 < 𝜏𝑦 < 13
−26 < 𝜏𝑧 < 26
Figura 17: Subsistema motores
Fonte: Próprios autores
A Figura 18 apresenta as matrizes da representação em espaço de estados da
dinâmica do quadricóptero de acordo com o código que se encontra no Apêndice I. O

37
vetor ep é um vetor coluna com todos os elementos unitários e com número de linhas
igual ao da matriz ap. O vetor que representa a ação da aceleração gravitacional é
dado por [0;0;0;0;0;-9.81;0;0;0;0;0;0].
Figura 18: Subsistema Dinâmica do Quadricóptero
Fonte: Próprios autores
A Figura 19 apresenta as restrições do sensor de posição no eixo z que não
possui leituras negativas.
Figura 19: Subsistema Sensores
Fonte: Próprios autores
A Figura 20 apresenta o subsistema de vetor de estados, utilizado para extrair
as informações correspondentes as respostas das variáveis de estado ao longo do
tempo e enviar os deslocamentos lineares e angulares, utilizando o bloco Goto, para
o subsistema de simulação 3D.

38
Figura 20: Subsistema Vetor de Estados
Fonte: Próprios autores
O primeiro dado a ser estabelecido é a restrição dos motores. Quanto empuxo
ele será capaz de gerar. Aplicando um degrau unitária na variável z, retira-se os
seguintes resultados mostrados nas Figuras 21 e 22.
Figura 21: Resposta ao degrau unitário da velocidade linear no eixo z
Fonte: Próprios autores

39
Figura 22: Saídas do controlador em resposta ao degrau unitário
Fonte: Próprios autores
No gráfico da Figura 21 obtemos a velocidade máxima atingida em decolagem
é de 2,6 m/s, que é um valor razoável para VANTs de pequeno porte. Para atingir tal
velocidade o máximo empuxo requerido foi um pouco acima de 50N, e
aproximadamente 13N por motor, de acordo com o gráfico da Figura 22.
O próximo parâmetro que deve ser estabelecido é o tempo que o quadricóptero
leva para decolar e se estabilizar na altura planejada (1m). O vetor de referência,
portando, é: 𝑥 = [0; 0; 0; 0; 1; 0; 0; 0; 0; 0; 0; 0] e a resposta do sistema é descrita no
gráfico da Figura 23.

40
Figura 23: Deslocamento vertical em resposta ao degrau unitário
Fonte: Próprios autores
Analisando o gráfico da Figura 23 pode ser observado um alto overshoot,
aproximadamente 150%, com rise time de 8,125 segundos. Com o critério de 2% o
tempo de acomodação foi de 19,44 segundos.
Ao alterar o sinal de referência, para um degrau com transição em rampa, a
resposta sistema passa a ser a exposta no gráfico da Figura 24:
Figura 24: Deslocamento vertical em resposta ao novo sinal de referência
Fonte: Próprios autores

41
Analisando o gráfico da Figura 24 pode ser observado uma melhora na
resposta do sistema. O overshoot é de aproximadamente 11,1%, com rise time de 9,7
segundos, undershoot de 49% e settling time de 20,63 segundos, no critério de 2%.
3.5 SIMULAÇÃO EM AMBIENTE VIRTUAL
Para a simulação 3D foi necessária a utilização de dois blocos da biblioteca de
animação virtual do Simulink, sendo estes: Euler to VR (virtual reality) e VR Sink.
Como o sistema de coordenadas do ambiente virtual é baseado em
quaternions e a modelagem aqui exposta é baseada em ângulos de Euler se faz
necessária a conversão através do bloco Euler to VR. Enquanto o VR Sink trata os
dados de deslocamento angular e linear para os elementos a serem animados no
ambiente virtual.
Figura 25: Subsistema de simulação 3D
Fonte: Próprios autores
O V-Realm Builder foi o software utilizado para criar e editar códigos em VRML,
como segue na Figura 26.

42
Figura 26: V-Realm Builder
Fonte: Próprios autores
Ainda é possível abrir canais para animações dirigidas por sinais do ambiente
Simulink como mostrado na Figura 27.
Figura 27: Parâmetros do Bloco VR Sink
Fonte: Próprios autores

43
CAPÍTULO 4 – RESULTADOS E DICUSSÕES
Nesta simulação o quadricóptero recebeu comandos em dois momentos:
primeiramente o comando para pairar a uma altura predeterminada, decolagem
vertical, e em seguida um comando para se deslocar horizontalmente (determinada
pelos autores). O distúrbio possui média nula e variância de 0.01, enquanto o ruído
possui média nula e variância de 0.001, esses valores foram definidos pelos autores,
de acordo com a literatura.
Estabelecido o tempo de decolagem, é possível analisar a resposta de todas
as variáveis ao plano de voo definido.
𝑥(𝑡) = {[0; 0; 0; 0; 0.05𝑡; 0; 0; 0; 0; 0; 0; 0], 0 ≤ 𝑡 < 20[1; 0; 1; 0; 1; 0; 0; 0; 0; 0; 0; 0], 𝑡 ≥ 20
Figura 28: Deslocamento linear no eixo x
Fonte: Próprios autores
No gráfico da Figura 28 observa-se a relação entre variável de estado
deslocamento linear no eixo x em relação ao tempo. O settling time é de 5 segundos.

44
Figura 29: Velocidade linear no eixo x
Fonte: Próprios autores
No gráfico da Figura 29 observa-se a relação entre variável de estado
velocidade linear no eixo x em relação ao tempo. O valor máximo, em módulo, está
entre 0.3 e 0.35 m/s.
Figura 30: Deslocamento linear no eixo y
Fonte: Próprios autores
No gráfico da Figura 30 observa-se a relação entre variável de estado
deslocamento linear no eixo y em relação ao tempo. O settling time é de 5 segundos.

45
Figura 31: Velocidade linear no eixo y
Fonte: Próprios autores
No gráfico da Figura 31 observa-se a relação entre variável de estado
velocidade linear no eixo y em relação ao tempo. O valor máximo, em módulo, está
entre 0,3 e 0,35 m/s.
Figura 32: Deslocamento linear no eixo z
Fonte: Próprios autores

46
No gráfico da Figura 32 observa-se a relação entre variável de estado
deslocamento linear no eixo z em relação ao tempo. As características desse gráfico
são iguais aos do gráfico da Figura 24, discutido na seção 3.4.
Figura 33: Velocidade linear no eixo z
Fonte: Próprios autores
No gráfico da Figura 33 observa-se a relação entre variável de estado
velocidade linear no eixo z em relação ao tempo. O valor máximo é de 2 m/s.
Figura 34: Deslocamento angular no eixo x
Fonte: Próprios autores

47
No gráfico da Figura 34 observa-se a relação entre variável de estado
deslocamento angular no eixo x em relação ao tempo. O valor máximo, em módulo,
está entre 0,03 e 0,04 rad.
Figura 35: Velocidade angular no eixo x
Fonte: Próprios autores
No gráfico da Figura 35 observa-se a relação entre variável de estado
velocidade angular no eixo x em relação ao tempo. O valor máximo, em módulo, está
entre 0,015 e 0,2 rad/s.

48
Figura 36: Deslocamento angular no eixo y
Fonte: Próprios autores
No gráfico da Figura 36 observa-se a relação entre variável de estado
deslocamento angular no eixo y em relação ao tempo. O valor máximo, em módulo,
está entre 0,05 e 0,06 rad.
Figura 37: Velocidade angular no eixo y
Fonte: Próprios autores

49
No gráfico da Figura 37 observa-se a relação entre variável de estado
velocidade angular no eixo y em relação ao tempo. O valor máximo, em módulo, está
entre 0,15 e 0,2 rad/s.
Figura 38: Deslocamento angular no eixo z
Fonte: Próprios autores
No gráfico da Figura 38 observa-se a relação entre variável de estado
deslocamento angular no eixo z em relação ao tempo. O valor máximo, em módulo,
é de 0,04 rad.
Figura 39: Velocidade angular no eixo z

50
Fonte: Próprios autores
No gráfico da Figura 39 observa-se a relação entre variável de estado
velocidade angular no eixo z em relação ao tempo. O valor máximo, em módulo, é de
0,06 rad/s.
Os resultados obtidos mostram que o comportamento do quadricóptero está
dentro do benchmarking previsto na literatura, apresentadas nas inequações da
Figura 40. As velocidades lineares resultantes estiveram abaixo de 3 m/s. As
angulações máximas de pitch e roll ficaram abaixo de π/4 rad, e angulação máxima
de yaw ficou abaixo de π rad. As taxas angulares de pitch e roll ficaram abaixo de
0,75 rad/s, e a taxa angular de yaw ficou abaixo de 1 rad/s.
Figura 40: Restrições das variáveis
Fonte: Alexis et. al, 2011

51
CAPÍTULO 5 – CONSIDERAÇÕES FINAIS
Neste capítulo serão apresentadas as conclusões dos resultados obtidos e
sugestões para trabalhos futuros.
5.1 CONCLUSÃO
Os resultados obtidos mostram que a estratégia de controle LQG é uma
ferramenta poderosa, pois dentro do cenário proposto foi capaz de controlar todas as
12 variáveis, possuindo robustez a ruídos de processo e de mensuração,
comportando-se dentro das restrições utilizadas na literatura.
O dimensionamento do motor se mostrou adequado para a aplicação
atendendo as demandas do controlador sem ocorrer saturação.
A simulação 3D apresenta-se como um aspecto relevante para análise da
dinâmica global do sistema e validação do modelo proposto, uma vez que a
visualização da simulação ajuda na compreensão dos gráficos e ressalta os possíveis
comportamentos indesejados.
O modelo apresentou uma boa resposta quando submetido a variação de sua
posição mesmo com a restrição de energia inserida no projeto de obtenção do
controlador otimizado. Para o comando de deslocamento de 1m, simultaneamente,
nos eixos x e y, o sistema se acomodou em 5s.
5.2 SUGESTÕES PARA TRABALHOS FUTUROS
Desenvolver um modelo com maior precisão levando em consideração não
linearidades que foram desconsideradas neste trabalho como: as propriedades
atmosféricas, propriedades aerodinâmicas (lift, drag, side force, blade flapping),
efeitos inerciais na mudança de velocidade do motor, efeitos giroscópicos e efeito
solo.
Construir um protótipo utilizando controle embarcado open source para estudo
do comportamento real do sistema sob a estratégia de controle exposta neste
trabalho.

52
REFERÊNCIAS BIBLIOGRÁFICAS
ALEXIS, K.; NIKOLAKOPOULOS, G.; TZES, A. Model Predictive Quadrotor
Control: Attitude, Altitude and Position Experimental Studies. IET Control Theory
and Applications, 2012.
ALLERTON, D. Principles of Flight Simulation. 1 ed. Reino Unido: Wiley, 2009.
AL-OMARI, M. A. R.; JARADAT, M. A.; JARRAH, M. Integrated Simulation Platform
for Indoor Quadrotor Applications. Proceedings of the 9th International Symposium
on Mechatronics and its Applications, 2013.
ARGENTIM, L. M.; REZENDE, W. C.; SANTOS, P. E.; AGUIAR, R. A. PID, LQR and
LQR-PID on a Quadcopter Platform. IEEE, 2013.
BOUABDALLAH, S. Design and Controlo of Quadrotors with Application to
Autonomous Flying. Tese. Lausanne, Suiça: EPFL, 2007.
GARCIA, C. Modelagem e Simulação de Processos Industriais e de Sistemas
Eletromecânicos. 2. ed. rev. e ampl. São Paulo: Editora da Universidade de São
Paulo, 2009.
JEONG, D.; KANG, T.; DHARMAYANDA, H. R.; BUDIYONO, A. H-Infinity Attitude
Control System Design for a Small-Scale Autonomous Helicopter with Nonlinear
Dynamics and Uncertainties. Journal of Aerospace Engineering, 2012.
JOYO, M. K.; HAZRY, D.; AHMED, S. F.; TANVEER, M. H.; WARSI, F. A.; HUSSAIN,
A. T. Altitude and Horizontal Motion Control of Quadrotor UAV in the Presence
of Air Turbulance. IEEE Conference on Systems, Process & Control, 2013.
LIU, H.; LU, G.; ZHONG, Y. Robust LQR Attitude Control of a 3-DOF Laboratory
Helicopter for Aggressive Maneuvers. IEEE Transactions on Industrial Electronics,
2013.
MAIA JR., M. D. Modelo de Controlador LQG/LTR com Filtro de Kalman com
Dinâmica Aumentada Aplicado a Sistemas de Posicionamento Dinâmico de
Estruturas Oceânicas. Dissertação. Rio de Janeiro: UFRJ, 2007.
MATHWORKS. Control System Toolbox. Disponível em: <
http://www.mathworks.com/help/control/index.html#control-design>. Acesso em
Setembro de 2014.
NACHKRUA, T.; PARNICHKUN, M. Identification and Optimal Control of
Quadrotor. Thammasat International Journal of Science and Technology, 2012.

53
NAIDU, D. S. Optimal Control Systems. 1 ed. Idaho, USA: CRC Press, 2003.
RHEIN, J.; MESSNARZ B. Development of a Robust Altitute Control System for
a Quadrocopter. Deutscher Luft- un Raumfahrtkongrss, 2012.
SKOGESTAD, S.; POSTLETHWAITE I. Multivariable Feedback Control. 2 ed.
Reino Unido: Wiley, 2005.
VOOS, H. Nonlinear Control of a Quadrotor Micro-UAV using Feedback-
Linearization. IEEE International Conference on Mechatronics, 2009.
54
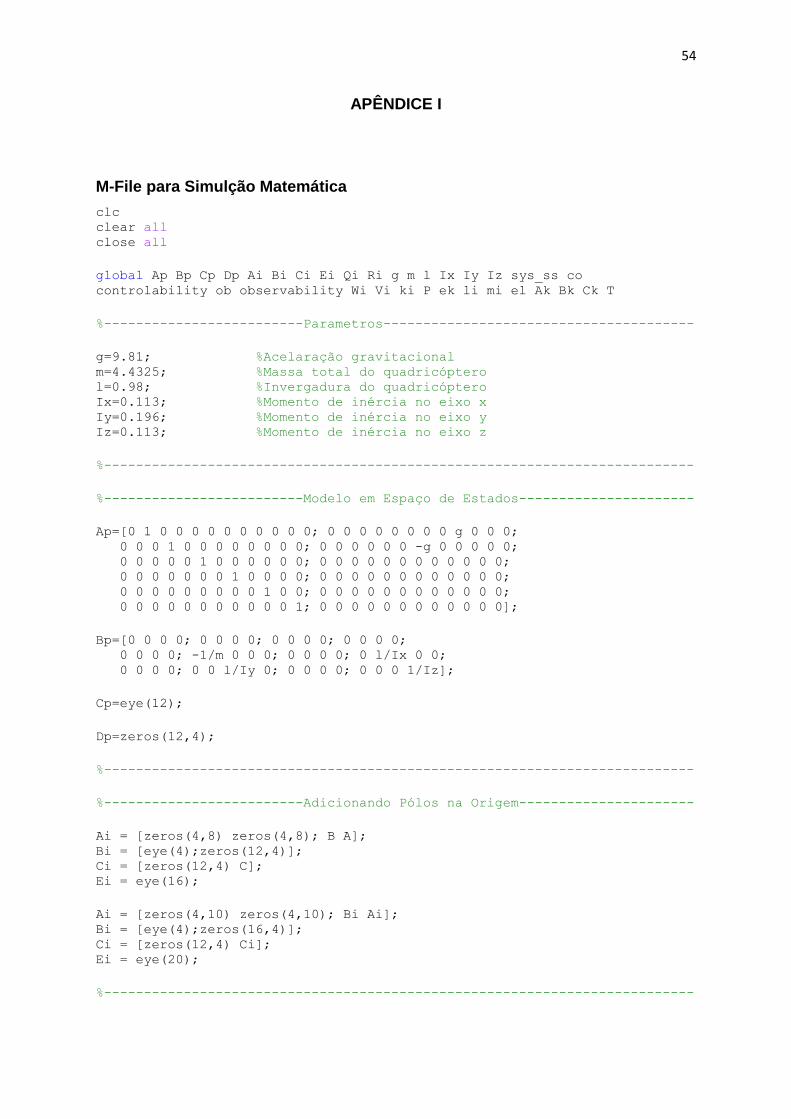
APÊNDICE I
M-File para Simulção Matemática
clc clear all close all
global Ap Bp Cp Dp Ai Bi Ci Ei Qi Ri g m l Ix Iy Iz sys_ss co
controlability ob observability Wi Vi ki P ek li mi el Ak Bk Ck T
%-------------------------Parametros---------------------------------------
g=9.81; %Acelaração gravitacional m=4.4325; %Massa total do quadricóptero l=0.98; %Invergadura do quadricóptero Ix=0.113; %Momento de inércia no eixo x Iy=0.196; %Momento de inércia no eixo y Iz=0.113; %Momento de inércia no eixo z
%--------------------------------------------------------------------------
%-------------------------Modelo em Espaço de Estados----------------------
Ap=[0 1 0 0 0 0 0 0 0 0 0 0; 0 0 0 0 0 0 0 0 g 0 0 0; 0 0 0 1 0 0 0 0 0 0 0 0; 0 0 0 0 0 0 -g 0 0 0 0 0; 0 0 0 0 0 1 0 0 0 0 0 0; 0 0 0 0 0 0 0 0 0 0 0 0; 0 0 0 0 0 0 0 1 0 0 0 0; 0 0 0 0 0 0 0 0 0 0 0 0; 0 0 0 0 0 0 0 0 0 1 0 0; 0 0 0 0 0 0 0 0 0 0 0 0; 0 0 0 0 0 0 0 0 0 0 0 1; 0 0 0 0 0 0 0 0 0 0 0 0];
Bp=[0 0 0 0; 0 0 0 0; 0 0 0 0; 0 0 0 0; 0 0 0 0; -1/m 0 0 0; 0 0 0 0; 0 l/Ix 0 0; 0 0 0 0; 0 0 l/Iy 0; 0 0 0 0; 0 0 0 1/Iz];
Cp=eye(12);
Dp=zeros(12,4);
%--------------------------------------------------------------------------
%-------------------------Adicionando Pólos na Origem----------------------
Ai = [zeros(4,8) zeros(4,8); B A]; Bi = [eye(4);zeros(12,4)]; Ci = [zeros(12,4) C]; Ei = eye(16);
Ai = [zeros(4,10) zeros(4,10); Bi Ai]; Bi = [eye(4);zeros(16,4)]; Ci = [zeros(12,4) Ci]; Ei = eye(20);
%--------------------------------------------------------------------------

55
%-------------------------Verificação de Controlabilidade e Observabilidade
sys_ss=ss(Ai,Bi,Ci,zeros(12,4)); co=ctrb(sys_ss); controlability=rank(co); ob=obsv(sys_ss); observability=rank(ob);
%--------------------------------------------------------------------------
%-------------------------Projeto de Controle LQG/LTR----------------------
Qi=[0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0; 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0; 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0; 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0; 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0; 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0; 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0; 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0; 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0; 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0; 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0; 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0; 0 0 0 0 0 0 0 0 0 0 0 0 1E8 0 0 0 0 0 0 0; 0 0 0 0 0 0 0 0 0 0 0 0 0 1E8 0 0 0 0 0 0; 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0; 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0; 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0; 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0; 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0; 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1];
Ri=1e-4*eye(4); Wi=0.01*eye(20); Vi=0.01*eye(12);
[ki, P, ek] = lqr(Ai, Bi, Qi, Ri); [li, mi, el] = lqe(Ai, Ei, Ci, Wi, Vi);
Ak = Ai - Bi*ki - li*Ci; Bk = li; Ck = ki;