Embed Size (px)
Citation preview
Teoria de Sistemas Lineares I
Teoria de Sistemas Lineares I
Prof. Aguinaldo S.e SilvaUniversidade Federal de Santa Catarina
Teoria de Sistemas Lineares I
Apresentacao do curso
Apresentacao do curso
1 Objetivos do curso
2 Plano de aulas
3 Criterio de avaliacao
4 Pacotes de simulacao
5 Bibliografia
6 Ementa detalhada
Teoria de Sistemas Lineares I
Objetivos e importancia do curso
Objetivos e importancia do curso
1 Curso basico para diversas areasEngenharia e sistemas: automacao, controle, robotica,sistemas de potencia, eletronica de potencia,telecomunicacoes, biomedica, etc.
2 ObjetivosEstudar aspectos quantitativos e qualitativos de sistemasfısicos descritos (ou aproximados) por modelos matematicoslineares. Em particular:
• Representacao de estados• Relacao entrada-saıda. Extensao para o caso multivariavel• Estabilidade, controlabilidade e observabilidade• Vantagens das diferentes representacoes• Estudo da solucao da equacao de estados

Teoria de Sistemas Lineares I
Pre requisito e plano de aulas
Plano de aulas
Livro texto: 2022 C.T.Chen - Linear System Theory and Design (3rd Edition) - Holt, Rinehalt and Wilson, 1999Sugere-se a leitura do capıtulo correspondente antes de cadaaula.Aulas
1 Apresentacao do curso. Introducao geral.
2-3 Descricao matematica de sistemas.
4-8 Revisao de algebra linear
9-10 Solucao de sistemas lineares invariantes no tempo (LTI)
11-12 Solucao de sistemas lineares variantes no tempo (LTV)
13-15 Estabilidade
15-17 Controlabilidade e observabilidade
18-20 Realizacoes irredutiveis

Teoria de Sistemas Lineares I
Pacotes de simulacao
Pacotes de simulacao
1 Matlab + Simulink
2 Vissim
3 Scilab

Teoria de Sistemas Lineares I
Bibliografia
Bibliografia
• Livro Texto
1 C.T.Chen - Linear System Theory and Design (3 rd Edition) -Holt, Rinehalt and Wilson, 1999
• Bibliografia Suplementar
1 C.T.Chen - Linear System Thoery and Design - Holt, Rinehaltand Wilson, 1984
2 T. Kailath - Linear Systems, Prentice Hall Inc, 19803 G. Strang - Linear Systems and Its Applications (third edition),
Harcourt Brace Jovanovich Publishers, 19864 B. Noble, J. W. Daniel - Applied Linear Algebra (third
edition), Prentice-Hall, 19885 F. R. Gantmacher - The Theory of Matrices, Vols. 1 e 2, New
York, Chelsea, 19596 R. Bellman - Introduction to Matrix Analysis, New York
McGraw Hill, 1960

Teoria de Sistemas Lineares I
Ementa Detalhada
Ementa detalhada
1 Apresentacao do Curso• Calendario• Planejamento das aulas• Criterio de avaliacao• Bibliografia
2 Introducao• Introducao a aplicacao de sistemas lineares a engenharia
eletrica• Fundamentos matematicos• Problema da modelagem

Teoria de Sistemas Lineares I
Ementa Detalhada
3 Equacoes diferenciais lineares (Apenas apresentacao detopicos)
• Sistema autonomo de 1a e 2a ordem• Modos proprios• Resposta ao degrau e ao impulso• Transformada de Laplace• Equacoes a diferencas
4 Descricao matematica de sistemas• Linearizacao. Sistema linearizado• Representacao por variaveis de estado• Representacao entrada e saıda• Sistemas SISO e MIMO, contınuos e discretos• Propriedades• Funcao e matriz de transferencia• Resposta ao impulso

Teoria de Sistemas Lineares I
Ementa Detalhada
5 Revisao de algebra linear• Autovalores e autovetores. Formas de Jordan• Funcoes matriciais• Conceitos basicos de matrizes• Traco, determinante e inversa• Propriedades e formulas• Autovalores e autovetores

Teoria de Sistemas Lineares I
Ementa Detalhada
6 Solucao de sistemas LTI• Sistemas lineares invariantes no tempo• Resposta a entrada nula• Discretizacao• Equacao discreta e solucao• Equacoes dinamicas equivalentes, formas canonicas
7 Realizacoes
8 Solucao de sistemas LTV• Sistemas lineares variantes no tempo• Solucao da equacao homogenea• Matriz fundamental de transicao de estados• Sistemas discretos• Equacoes equivalentes• Transformacoes• Realizacoes

Teoria de Sistemas Lineares I
Ementa Detalhada
9 Estabilidade de sistemas Lineares• Criterios do tipo entrada-saıda• Criterio de Lyapunov• Sistemas discretos
10 Controlabilidade e observabilidade• Independencia linear de funcoes temporais• Teorema de controlabilidade e de observabilidade.• Sistemas discretos no tempo• Decomposicao canonica• Realizacao mınima
11 Realizacoes irredutıveis de matrizes de transferencia• Independencia linear de funcoes temporais• Polinomio caracterıstico e grau de uma matriz racional propria• Realizacoes irredutıveis de funcoes racionais proprias

Teoria de Sistemas Lineares I
Introducao a aplicacao de sistemas lineares a engenharia
Introducao a aplicacao de sistemas lineares a engenhariaeletrica
• Formulacao linear dos modelos mesmo quando os sistemas saonao-lineares
• Analise de desempenho e projeto usam entao a teoria desistemas lineares
• Amplo uso em engenharia eletrica em varias areas• Sistemas de controle• Processamento de sinais• Sistemas eletricos de potencia• Eletronica de potencia• Biomedica
• Teoria de sistemas lineares e formalizada usando conceitosmatematico, especialmente da algebra linear
• Metodos avancados usam muitos destes conceitos
Teoria de Sistemas Lineares I
Fundamentos matematicos
Fundamentos matematicos
• Estudo de sistemas fısicos descritos por modelos lineares
• Aspectos qualitativos e quantitativos
• Projeto da acao para alterar o desempenho
• Muitos sistemas fısicos sao lineares em determinadas faixas deoperacao
• O estudo de modelos lineares pode ser sistematizado (algebralinear)
• Ponto de partida para o estudo de sistemas fısicos nao lineares
• Uso intensivo do computador para analise e projeto(capacidade crescente de calculo e de memoria)

Teoria de Sistemas Lineares I
Problema de modelagem
Descricao Matematica
• Uma vez definido um modelo para um sistema fısico(chamado doravante de sistema), aplicam-se as leis da fısicapara se obter uma descricao matematica do sistema
• A modelagem pode ser:
1 Fısica: baseada nas Leis de Newton (sistemas mecanicos), Leisde Kirchhoff (tensao e corrente em cirtuitos eletricos), leis daTermodinamica, etc.
2 Experimental: baseada em relacoes entrada-saıda
• Um mesmo sistema pode ter diferentes descricoesmatematicas
Teoria de Sistemas Lineares I
Problema de modelagem
Problema de modelagem
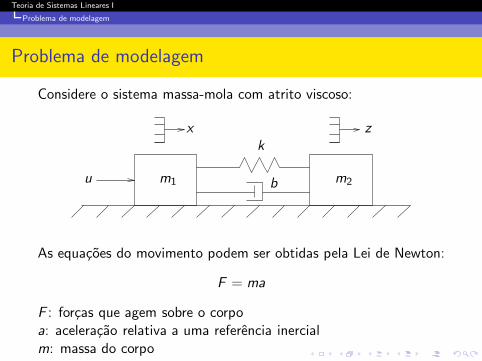
Considere o sistema massa-mola com atrito viscoso:
m1 m2
x
u b
k
z
As equacoes do movimento podem ser obtidas pela Lei de Newton:
F = ma
F : forcas que agem sobre o corpoa: aceleracao relativa a uma referencia inercialm: massa do corpo

Teoria de Sistemas Lineares I
Problema de modelagem
Sistema de equacoes diferenciais
x +b
m1(x − z) +
k
m1(x − z) =
u
m1
z +b
m2(z − x) +
k
m2(z − x) = 0
As molas e amortecedores foram modelados como elementoslineares.
Com as equacoes, pode-se determinar o comportamento dosistema (isto e, as posicoes x , z e as velocidades x , z) paraqualquer forca externa u aplicada.
Teoria de Sistemas Lineares I
Problema de modelagem
Descricao por Variaveis de Estado
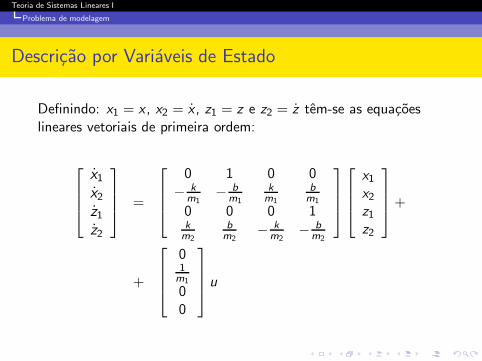
Definindo: x1 = x , x2 = x , z1 = z e z2 = z tem-se as equacoeslineares vetoriais de primeira ordem:
x1
x2
z1
z2
=
0 1 0 0
− km1− b
m1
km1
bm1
0 0 0 1km2
bm2
− km2− b
m2
x1
x2
z1
z2
+
+
01
m1
00
u

Teoria de Sistemas Lineares I
Problema de modelagem
Descricao por Funcao de Transferencia
Aplicando a Transformada de Laplace (com condicoes iniciaisnulas) tem-se
s2X (s) +b
m1s(X (s)− Z (s)) +
k
m1(X (s)− Z (s)) =
1
m1U(s)
s2Z (s) +b
m2s(Z (s)− X (s)) +
k
m2(Z (s)− X (s)) = 0
e obtem-se as relacoesX (s)
U(s)e
Z (s)
U(s)

Teoria de Sistemas Lineares I
Problema de modelagem
Metodos empıricos
• Aplicacao de varias entradas e observacao das saıdas
• Ajuste e alteracao dos parametros ou conexao comcompensadores para melhorar o desempenho
• Baseado em tentativa e erro e experiencia do projetista
• Inviavel para sistemas grandes ou complexos
SistemaVariaveis Saıda
Teoria de Sistemas Lineares I
Problema de modelagem
Metodos analıticos
• Modelagem
• Descricao Matematica
• Analise do Modelo
• Projeto

Teoria de Sistemas Lineares I
Problema de modelagem
Modelagem
• Distincao entre sistemas fısicos e modelos
Circuitos e sistemas de controle estudados em cursos de graduacaosao modelos.Resistor linear com resistencia constante (modelo valido dentro decertos limites de potencia)
0
i
v
i
+
v
−

Teoria de Sistemas Lineares I
Problema de modelagem
A maior parte dos sistemas lineares e invariante no tempo, isto e,A, B , C e D nao dependem da variavel tempo t
x(t) = Ax(t) + Bu(t)
y(t) = Cx(t) + Du(t)
Descricao externa
y(t) =
∫ t
0G (t − τ)u(τ)dτ
Teoria de Sistemas Lineares I
Problema de modelagem
Para sistemas lineares invariantes no tempo, a transformada deLaplace e uma importante ferramenta de analise e de projeto.
Y (s) = G (s)U(s)
U(s): transformada de Laplace de u(t)Y (s): transformada de Laplace de y(t)G (s): matriz de transferenciaQuando u = 0 o sistema e chamado autonomo

Teoria de Sistemas Lineares I
Problema de modelagem
Analise do Modelo
• Baseia-se em descricoes do tipo
Y (s) = G (s)U(s)
G (s) : Matriz de Transferencia do Sistemaou entao em um conjunto de equacoes diferenciais de primeiraordem
x(t) = Ax(t) + Bu(t)
y(t) = Cx(t) + Du(t)
x , u, y : variaveis de estado, controle e saıda do sistemaA, B , C e D : matrizes de dimensoes apropriadas

Teoria de Sistemas Lineares I
Problema de modelagem
• Dois aspectos basicos na analise do modelo:
Quantitativo: calculo das respostas para determinadas entradas;verificacao da acuidade do modeloQualitativo: propriedades gerais do sistema como estabilidade,controlabilidade e observabilidade; permite o desenvolvimento detecnicas de projetoO uso de mais de uma descricao matematica as vezes e necessariopara uma analise completa

Teoria de Sistemas Lineares I
Problema de modelagem
Projeto
• Se o comportamento do sistema, embora fiel ao modelodescrito, e insatisfatorio tendo em vista certas especificacoesde desempenho, torna-se em geral necessario projetar umcompensador ou controlador que leve o sistema a apresentaras caracterısticas desejadas.
• Conceito de Realimentacao
u = Kx : Realimentacao de Estado
u = Ky : Realimentacao de Saıda
K : Matriz de Ganho
Teoria de Sistemas Lineares I
Revisao de equacoes diferenciais e a diferenca
Equacoes Diferenciais
• Sistemas lineares invariantes no tempo podem ser descritospor equacoes diferenciais ordinarias a coeficientes constantes.
• Em geral, a ordem da equacao esta associada ao numero dearmazenadores de energia

Teoria de Sistemas Lineares I
Sistemas Autonomos
Sistemas Autonomos
• Equacao de Primeira Ordem:x + τ x = 0 , τ constante de tempoModo proprio: x(t) = K exp(λt)
Equacao caracterıstica: λ +1
τ= 0
Solucao: x(t) = K exp(−t
τ)

Teoria de Sistemas Lineares I
Sistemas Autonomos
• Equacao de Segunda Ordem: x + 2αx + ω20x = 0
α: coeficiente de amortecimentoω0: frequencia natural de oscilacaoDois modos proprios do tipo: x(t) = K exp(λt)
Equacao caracterıstica: λ2 + 2αλ + ω20 = 0
Solucao: (λ1 6= λ2): x(t) = K1 exp(λ1t) + K2 exp(λ2t)(λ1 = λ2 = λ): x(t) = K1 exp(λt) + K2t exp(λt)

Teoria de Sistemas Lineares I
Sistemas Nao Autonomos
Sistemas Nao Autonomos
• Metodo dos Coeficientes a Determinar (sistema de ordem n)
x(t) =
n∑
i=1
cipi (t) +
m∑
j=0
bj fj(t)
⇑ ⇑transitoria forcada
A solucao e uma combinacao linear dos n modos proprios pi (t) edas m + 1 derivadas linearmente independentes fj(t) da entrada(por definicao, f0(t) = f (t)).
Os coeficientes bi sao calculados substituindo-se o termo “forcado”na equacao, e os coeficientes ci sao determinados ajustando-se asolucao as condicoes iniciais.

Teoria de Sistemas Lineares I
Sistemas Nao Autonomos
Modos Proprios: Conjunto de n funcoes linearmenteindependentes que constituem uma base para a solucao da equacaohomogenea de um sistema linear com n armazenadores de energia.
• Sistematizacao
1) Calcular os modos proprios (raızes da equacao caracterıstica).2) Substituir a componente forcada na equacao para obter os seuscoeficientes.3) Com as condicoes iniciais, obter os demais coeficientes.

Teoria de Sistemas Lineares I
Sistemas Nao Autonomos
Exemplo
x + 5x = t + 10 ; x(0) = −10
5λ + 1 = 0 =⇒ λ = −0.2
xf = k1t + k
=⇒ k1t+k+5k1 = t+10 ; k1 = 1 ; k = 5 =⇒ xf = t+5
x(t) = k0 exp(−0.2t) + t + 5 ; x(0) = −10 =⇒ k0 = −15
Portanto x(t) = −15 exp(−0.2t) + t + 5

Teoria de Sistemas Lineares I
Sistemas Nao Autonomos
0 2 4 6 8 10 12 14 16 18 20−10
−5
0
5
10
15
20
25
x(t)
t + 5
t

Teoria de Sistemas Lineares I
Sistemas Nao Autonomos
Exemplo
x + 3x + 2x = t3 ; x(0) = 5 , x(0) = −2
λ2 + 3λ + 2 = 0 =⇒ λ1 = −1 , λ2 = −2
xf = k3t3 + k2t
2 + k1t + k
=⇒ k3 = 0.5 , k2 = −2.25 , k1 = 5.25 , k = −5.625
x(t) = a1 exp(−t) + a2 exp(−2t) + 0.5t3 − 2.25t2 + 5.25t − 5.625
x(0) = 5 , x(0) = −2 =⇒ a1 = 14 ; a2 = −3.375

Teoria de Sistemas Lineares I
Sistemas Nao Autonomos
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5−10
−5
0
5
10
15
20
25
30
x(t)
xf (t)
t

Teoria de Sistemas Lineares I
Algumas funcoes de entrada
Funcao Degrau Unitario u(t)
• Definicao: uǫ(t)
t
1
uǫ(t)
ǫ

Teoria de Sistemas Lineares I
Algumas funcoes de entrada
uǫ(t) ,
0 , t < 0
(1/ǫ)t , 0 < t < ǫ
1 , t > ǫ
u(t) , limǫ→0+
uǫ(t)
u(t)
1
t

Teoria de Sistemas Lineares I
Algumas funcoes de entrada
Funcao Impulso Unitario δ(t)
• Definicao: δǫ(t)
t
1/ǫ
δǫ(t)
ǫ
Teoria de Sistemas Lineares I
Algumas funcoes de entrada
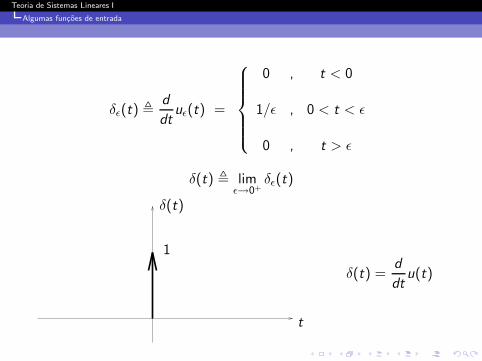
δǫ(t) ,d
dtuǫ(t) =
0 , t < 0
1/ǫ , 0 < t < ǫ
0 , t > ǫ
δ(t) , limǫ→0+
δǫ(t)
t
1
δ(t)
δ(t) =d
dtu(t)

Teoria de Sistemas Lineares I
Algumas funcoes de entrada
• Propriedade:
∫ +∞
−∞
f (t)δ(t)dt = f (0) , ∀ f (t) contınua em t = 0
Prova:
I =
∫ +∞
−∞
f (t)δ(t)dt = limǫ→0+
∫ +∞
−∞
f (t)δǫ(t)dt =
= limǫ→0+
∫
ǫ
0
1
ǫf (t)dt

Teoria de Sistemas Lineares I
Algumas funcoes de entrada
Teorema do Valor Medio:
∫ b
a
f (t)dt = f (c)(b − a) , c ∈ (a, b)
a bc
=⇒ I = limǫ→0+
1
ǫf (y)(ǫ− 0) , y ∈ (0, ǫ)
I = limǫ→ 0+
y ∈ (0, ǫ)
f (y) = f (0)
f (·) =⇒ Funcao Contınua =⇒ f (0−) = f (0) = f (0+)

Teoria de Sistemas Lineares I
Algumas funcoes de entrada
• Resumo:
∫ +∞
−∞
f (t)δ(t)dt = f (0) ,
∫ +∞
−∞
f (t)δ(t − a)dt = f (a)
• Corolario: para f (t) = 1
∫ +∞
−∞
δ(t)dt = 1 =⇒ Area Unitaria
• Propriedade: δ(t) e uma “funcao” par
∫ +∞
−∞
f (t)δ(−t)dt = f (0)
fazendo ζ = −t,

Teoria de Sistemas Lineares I
Algumas funcoes de entrada
= −
∫
−∞
+∞
f (−ζ)δ(ζ)dζ =
∫ +∞
−∞
f (−ζ)δ(ζ)dζ =
=
∫ +∞
−∞
f (−t)δ(t)dt = f (−0) = f (0)
pois f (·) e contınua.
=⇒ δ(−t) = δ(t)

Teoria de Sistemas Lineares I
Algumas funcoes de entrada
Exemplo
• Entrada em Degrau
e
Ri
C
++
−−
v
e(t) = Eu(t) =
E , t > 0
0 , t < 0
Teoria de Sistemas Lineares I
Algumas funcoes de entrada
e(t)
E
t
Como a funcao degrau vale zero no intervalo (−∞, 0), e o circuitoe dissipativo, a tensao no capacitor em t = 0 e nula.
Assim, a resposta a entrada em degrau pode ser estudada a partirda resposta a uma entrada constante E com condicoes iniciaisnulas.

Teoria de Sistemas Lineares I
Algumas funcoes de entrada
Resolucao de equacoes diferenciais
Metodo dos coeficientes a determinar
vf (t) = AE , t > 0
vf + τ vf = e =⇒ AE = E =⇒ A = 1
v(t) = K exp(−t
τ) + E
v(0) = 0, =⇒ K = −E ,
v(t) = E[
1− exp(−t
τ)]
, t > 0 e v(t) = 0 , t < 0
v(t) = E[
1− exp(−t
τ)]
u(t)

Teoria de Sistemas Lineares I
Algumas funcoes de entrada
v(t)
E
τt

Teoria de Sistemas Lineares I
Algumas funcoes de entrada
v(t)
E
τt
dv
dt=
E
τexp(−
t
τ)u(t) + E
[
1− exp(−t
τ)]
δ(t)
Teoria de Sistemas Lineares I
Algumas funcoes de entrada
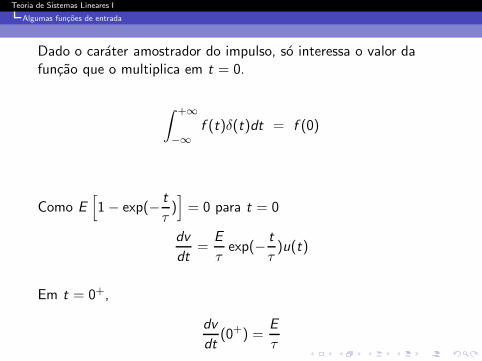
Dado o carater amostrador do impulso, so interessa o valor dafuncao que o multiplica em t = 0.
∫ +∞
−∞
f (t)δ(t)dt = f (0)
Como E[
1− exp(−t
τ)]
= 0 para t = 0
dv
dt=
E
τexp(−
t
τ)u(t)
Em t = 0+,
dv
dt(0+) =
E
τ

Teoria de Sistemas Lineares I
Algumas funcoes de entrada
• Resposta ao Impulso , h(t): (Entrada e(t) = δ(t))=⇒ Condicoes Iniciais Nulas (v(0) = 0)
δ(t) ,d
dtu(t)
h(t) =d
dt[ resposta ao degrau ]
Poish(t) + τ h(t) = δ(t)
v(t) + τ v(t) = u(t)
=⇒ h(t) = v(t)
=⇒ h(t) =d
dt
[
1− exp(
−t
τ
)]
u(t)
Teoria de Sistemas Lineares I
Algumas funcoes de entrada
h(t) =1
τexp
(
−t
τ
)
u(t) +[
1− exp(
−t
τ
)]
δ(t)
Em t = 0,[
1− exp(
−t
τ
)]
= 0
h(t) =1
τexp
(
−t
τ
)
u(t)
Teoria de Sistemas Lineares I
Algumas funcoes de entrada
Transformada de Laplace
• f (t) funcao no tempo, nula para t < 0
F (s) ,
∫
∞
0f (t) exp(−st)dt
s , σ + jω: frequencia complexa
Notacao: F (s) = L[f (t)]

Teoria de Sistemas Lineares I
Algumas funcoes de entrada
Transformada de Laplace
• Propriedades
• L[Kf (t)] = KF (s) , K constante
• L[f1(t)± f2(t)] = F1(s)± F2(s)
• L[d
dtf (t)] = sF (s)− f (0)
• L[exp(−at)f (t)] = F (s + a) , a constante
• Alguns Pares f (t) ↔ F (s) = L[f (t)]
δ(t) ↔ 1
u(t) ↔1
s, u(t) funcao degrau
Ku(t) ↔K
s, K constante

Teoria de Sistemas Lineares I
Algumas funcoes de entrada
Ktu(t) ↔K
s2, K constante
sin(ωt)u(t) ↔ω
s2 + ω2
exp(−at)u(t) ↔1
s + a, a constante
Teoria de Sistemas Lineares I
Algumas funcoes de entrada
Pode ser aplicada na solucao de equacoes integro-diferenciais comcoeficientes constantes:
• Torna algebricas as equacoes diferenciais.
• Simplifica o calculo da resposta impulsiva.
Seja V (s) = L[v(t)] (v(t) vale zero para t < 0)
• L[v(t)] = sV (s)− v(0)
• L[v(t)] = s2V (s)− sv(0)− v(0)

Teoria de Sistemas Lineares I
Algumas funcoes de entrada
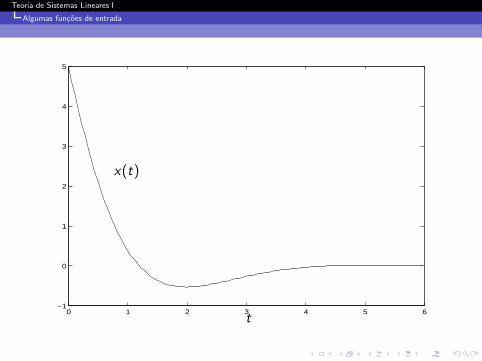
Exemplo
x + 2x + 2x = 0 ; x(0) = 5 , x(0) = −2
(s2 + 2s + 2)X (s) = (s + 1)x(0) + x(0)
X (s) =5(s + 1)
s2 + 2s + 2+
−2
s2 + 2s + 2; x(t) = L−1[X (s)]
Fracoes Parciais
X (s) =2.5
s + 1− j+
2.5
s + 1 + j+
j
s + 1− j+
−j
s + 1 + j
x(t) = (2.5 + j) exp[(−1 + j)t] + (2.5 − j) exp[(−1− j)t]
Teoria de Sistemas Lineares I
Algumas funcoes de entrada
0 1 2 3 4 5 6−1
0
1
2
3
4
5
x(t)
t

Teoria de Sistemas Lineares I
Algumas funcoes de entrada
Resposta ao impulso
x + 2x + 2x = δ(t) ; x(0) = x(0) = 0
(s2 + 2s + 2)X (s) = 1
X (s) =1
s2 + 2s + 2; x(t) = L−1[X (s)]
Fracoes Parciais
X (s) =0.5j
s + 1− j+−0.5j
s + 1 + j
x(t) = −0.5j exp[(−1 + j)t] + 0.5j exp[(−1− j)t]

Teoria de Sistemas Lineares I
Algumas funcoes de entrada
0 1 2 3 4 5 6−0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
x(t)
t

Teoria de Sistemas Lineares I
Algumas funcoes de entrada
Expansao em Fracoes Parciais
Objetivo: facilitar o calculo da Transformada Inversa de Laplace.
Seja a funcao racional em s descrita porN(s)
D(s)Caso 1: Grau de N(s) < Grau de D(s)
a) D(s) nao tem raızes multiplas.
s + 1
s3 + s2 − 6s=
s + 1
s(s − 2)(s + 3)
=A
s+
B
s − 2+
C
s + 3

Teoria de Sistemas Lineares I
Algumas funcoes de entrada
A = sN(s)
D(s)
∣
∣
∣
∣
s = 0= −
1
6
B = (s − 2)N(s)
D(s)
∣
∣
∣
∣
s = 2=
3
10
C = (s + 3)N(s)
D(s)
∣
∣
∣
∣
s = −3= −
2
15
• Alternativamente, e possıvel usar identidade polinomial para ocalculo das constantes a determinar.

Teoria de Sistemas Lineares I
Algumas funcoes de entrada
b) D(s) com raızes multiplas.
s + 1
s(s − 2)3=
A
s+
B
(s − 2)+
C
(s − 2)2+
D
(s − 2)3
A = sN(s)
D(s)
∣
∣
∣
∣
s = 0= −
1
8
D = (s − 2)3N(s)
D(s)
∣
∣
∣
∣
s = 2=
3
2
C =d
ds
[
(s − 2)3N(s)
D(s)
]∣
∣
∣
∣
s = 2=
d
ds
[
s + 1
s
]∣
∣
∣
∣
s = 2= −
1
s2
∣
∣
∣
∣
s = 2= −
1
4
pois

Teoria de Sistemas Lineares I
Algumas funcoes de entrada
d
ds
[
A(s − 2)3
s+ B(s − 2)2 + C (s − 2) + D
]∣
∣
∣
∣
s = 2= C
2B =d2
ds2
[
(s − 2)3N(s)
D(s)
]∣
∣
∣
∣
s = 2=
2
s3
∣
∣
∣
∣
s = 2=
1
4
pois
d2
ds2
[
A(s − 2)3
s+ B(s − 2)2 + C (s − 2) + D
]∣
∣
∣
∣
s = 2= 2B
Teoria de Sistemas Lineares I
Algumas funcoes de entrada
Caso 2: Grau de N(s) ≥ Grau D(s)
Reduzir ao caso anterior atraves de Divisao de Polinomios.
(s + 2)3
(s + 1)= As2 + Bs + C +
D
s + 1
(s + 2)3
(s + 1)=
s3 + 6s2 + 12s + 8
s + 1

Teoria de Sistemas Lineares I
Algumas funcoes de entrada
s3 + 6s2 + 12s + 8 / s + 1
s3 + s2 s2 + 5s + 7
5s2 + 12s + 85s2 + 5s
7s + 87s + 7
+ 1
(s + 2)3
s + 1= s2 + 5s + 7 +
1
s + 1
Teoria de Sistemas Lineares I
Algumas funcoes de entrada
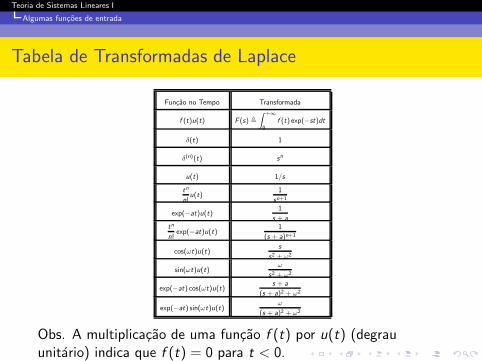
Tabela de Transformadas de Laplace
Funcao no Tempo Transformada
f (t)u(t) F (s) ,
∫ +∞
0f (t) exp(−st)dt
δ(t) 1
δ(n)(t) sn
u(t) 1/s
tn
n!u(t)
1
sn+1
exp(−at)u(t)1
s + a
tn
n!exp(−at)u(t)
1
(s + a)n+1
cos(ωt)u(t)s
s2 + ω2
sin(ωt)u(t)ω
s2 + ω2
exp(−at) cos(ωt)u(t)s + a
(s + a)2 + ω2
exp(−at) sin(ωt)u(t)ω
(s + a)2 + ω2
Obs. A multiplicacao de uma funcao f (t) por u(t) (degrauunitario) indica que f (t) = 0 para t < 0.
Teoria de Sistemas Lineares I
Algumas funcoes de entrada
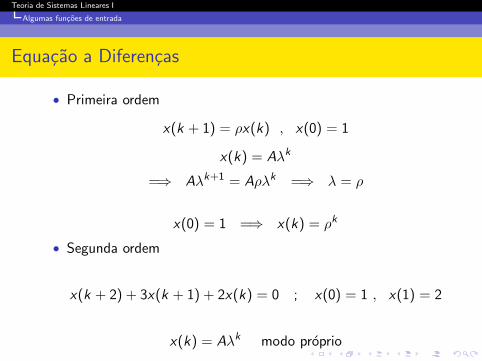
Equacao a Diferencas
• Primeira ordem
x(k + 1) = ρx(k) , x(0) = 1
x(k) = Aλk
=⇒ Aλk+1 = Aρλk =⇒ λ = ρ
x(0) = 1 =⇒ x(k) = ρk
• Segunda ordem
x(k + 2) + 3x(k + 1) + 2x(k) = 0 ; x(0) = 1 , x(1) = 2
x(k) = Aλk modo proprio

Teoria de Sistemas Lineares I
Algumas funcoes de entrada
=⇒ Aλk(λ2 + 3λ + 2) = 0 ; λ1 = −1 , λ2 = −2
x(k) = A1(−1)k + A2(−2)k ; A1 = 4 , A2 = −3
x(k) = 1, 2,−8, 20,−44, 92, . . . sequencia
• Coeficientes a determinar
Teoria de Sistemas Lineares I
Algumas funcoes de entrada
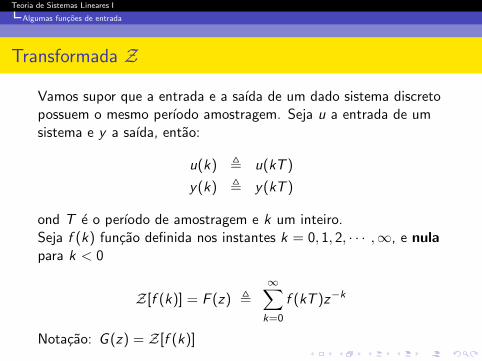
Transformada Z
Vamos supor que a entrada e a saıda de um dado sistema discretopossuem o mesmo perıodo amostragem. Seja u a entrada de umsistema e y a saıda, entao:
u(k) , u(kT )
y(k) , y(kT )
ond T e o perıodo de amostragem e k um inteiro.Seja f (k) funcao definida nos instantes k = 0, 1, 2, · · · ,∞, e nulapara k < 0
Z[f (k)] = F (z) ,
∞∑
k=0
f (kT )z−k
Notacao: G (z) = Z[f (k)]
Teoria de Sistemas Lineares I
Algumas funcoes de entrada
• Pode ser aplicada na solucao de equacoes a diferencas comcoeficientes constantes:
• Torna algebricas as equacoes diferencas.

Teoria de Sistemas Lineares I
Algumas funcoes de entrada
Propriedades da Transformada Z
v(k) V (z)
Av(k); A:cte AV (z)
v1(k) + v2(k) V1(z) + V2(z)
v((k + 1)T ) zV (z)− zv(0)
kv(k) −TzdV (z)
dz
e−akv(k) V (zeaT )

Teoria de Sistemas Lineares I
Algumas funcoes de entrada
Tabela de Transformadas Z
f (t) F (s) F (z)
δ(t) 1 1
δ((k − 1)T ) e−kTs z−k
u(t) 1/sz
z − 1
t 1/s2 Tz
(z − 1)2
e−at 1
s + a
z
z − e−aT
1− e−at 1
s(s + a)
(1− e−aT )z
(z − 1)(z − e−aT )
cos(ωt)s
s2 + ω2
z(z − cos ωT )
z2 − 2z cos ωT + 1
sin(ωt)ω
s2 + ω2
z sinωT
z2 − 2z cos ωT + 1
e−at cos(ωt)s + a
(s + a)2 + ω2
z2 − ze−aT cos ωT
z2 − 2ze−aT cos ωT + e−2aT
e−at sin(ωt)ω
(s + a)2 + ω2
ze−aT sinωT
z2 − 2ze−aT cos ωT + e−2aT
Obs. Nas transformadas apresentadas acima pressupoe-se quef (t) = 0 para t < 0.

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Descricao matematica de sistemas
Objetivo: O objetivo deste capıtulo e apresentar as descricoesentrada-saıda e a representacao por variaveis de estados desistemas fısicos.
Topicos relacionados
• Modelagem de sistemas fısicos
• Linearizacao
• Integral de convolucao
• Transformada de Laplace e funcao de transferencia
• Representacao por variaveis de estado
Teoria de Sistemas Lineares I
Descricao matematica de sistemas
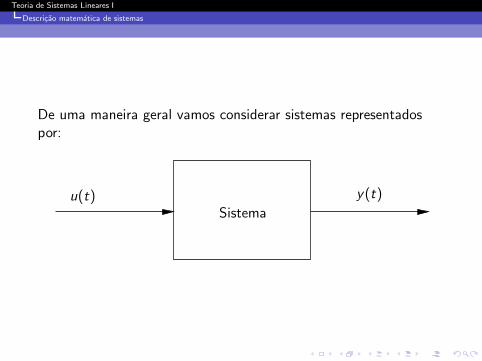
De uma maneira geral vamos considerar sistemas representadospor:
Sistemau(t) y(t)

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Descricao matematica de sistemas
Sao considerados sistemas tendo entradas e saıdas como.Assume-se que para uma certa excitacao (entrada) uma unicaresposta (saıda) e obtida. Matematicamente dizemos que osistema satisfaz a condicao de Lipschitz.Dependendo do numero de entradas e saıdas temos:
• 1 entrada e 1 saıda: sistema monovariavel ou SISO (Singleinput - single output)
• Varias entradas ou varias saıdas: sistema multivariavel ouMIMO (Multiple input - multiple output)
· · ·· · ·
u1
u2
up
y1
y2
yq

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
u′ =[
u1 u2 · · · up
]
; y ′ =[
y1 y2 · · · yq
]
• Sistemas Contınuos no Tempou = u(t) ; y = y(t) : funcoes do tempot ∈ (−∞,∞)
• Sistemas Discretos no Tempou = u(k) ; y = y(k) : sequencias k ∈ Z
• Sistema sem MemoriaUm sistema e instantaneo ou sem memoria se a saıda dosistema y(t1) depende apenas da entrada no instante t1 (naodepende do que ocorreu antes de t1 nem do que ocorreradepois).Exemplo: circuito composto apenas por resistores

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
• Sistema CausalUm sistema e causal ou nao antecipativo se a saıda dosistema no instante t depende das entradas passadas e daentrada no instante t (mas nao depende de entradas aplicadasapos o instante t).
Um sistema nao causal pode prever ou antecipar os sinais futuros(nenhum sistema fısico tem essa capacidade). A causalidade e umacondicao necessaria para um sistema existir ou ser implementado.

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Estado de um sistema
Definicao: O estado x(t0) de um sistema no instante t0 e aquantidade de informacao em t0 que junto com u(t), t ≥ t0determina de maneira unica a saıda y(t) do sistema para todot ≥ t0.
De certa forma, o estado resume a informacao do passado queafeta as saıdas futuras.Conhecendo o estado x(t0):
x(t0)u(t), t ≥ t0
→ y(t), t ≥ t0

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Descricao matematica de sistemas
Exemplo
R1
R2
C1 C2
u2u1
y
x1 x2
x3
L
++
+
+
−−
−
−

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Conhecendo-se as tensoes nos capacitores x1(t0) e x2(t0) e acorrente no indutor x3(t0), para qualquer entrada u(t) aplicada apartir de t0 a saıda y(t) e unicamente determinada para t ≥ t0.
• Estado do Circuito
x(t0) =
x1(t0)x2(t0)x3(t0)
x : variavel de estado
• Sistema com parametros concentrados (numero finito devariaveis de estado)• Sistema com parametros distribuıdos (numero infinito devariaveis de estado)

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Descricao matematica de sistemas
Sistemas com parametros distribuıdos
• Estruturas mecanicamente flexıveis
• Sistemas termicos
• Linhas de transmissao
• Sistema atraso unitario
y(t) = u(t − 1)

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
u(t)
y(t)
0 t01 t
Estado: u(t), t0 − 1 ≤ t < t0 (infinitos pontos)

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Sistemas Lineares
Para quaisquer dois pares i = 1, 2 de entradas e condicoes iniciais
xi (t0)ui (t), t ≥ t0
→ yi (t), t ≥ t0
x1(t0) + x2(t0)u1(t) + u2(t), t ≥ t0
→ y1(t) + y2(t), t ≥ t0 aditividade
αxi (t0)αui (t), t ≥ t0
→ αyi (t), t ≥ t0 ; i = 1, 2 homogeneidade
α1x1(t0) + α2x2(t0)α1u1(t) + α2u2(t), t ≥ t0
→ α1y1(t)+α2y2(t), t ≥ t0 superposicao
Sistema nao-linear: o princıpio da superposicao nao se aplica

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Descricao matematica de sistemas
Sistemas Lineares
Se u(t) ≡ 0, t ≥ t0: resposta a entrada nula
Se x(t0) = 0: resposta ao estado nulo
x(t0)u(t) ≡ 0, t ≥ t0
→ yent. nula(t), t ≥ t0
x(t0) = 0u(t), t ≥ t0
→ yest. nulo(t), t ≥ t0
Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Descricao Entrada-Saıda
• assume que antes da aplicacao de qualquer entrada o sistemaesta relaxado ou em repouso
• a saıda do sistema e influenciada apenas e unicamente pelaentrada aplicada apos o instante de referencia
ui → yi
Sistemas Lineares: para quaisquer α e ui , i = 1, 2:
u1 + u2 → y1 + y2 ; αui → αyi

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Sistemas SISO — Funcao Impulso
• Funcao Pulso
t1 t1 + ∆
∆
t
1/∆
δ∆(t−t1) =
0 , t < t11/∆ , t1 ≤ t < t1 + ∆
0 , t ≥ t1 + ∆
δ(t−t1) , lim∆→0
δ∆(t−t1) : funcao impulso ou Delta de Dirac
Teoria de Sistemas Lineares I
Descricao matematica de sistemas
• Propriedades
∫ +∞
−∞
δ(t − t1)dt =
∫ t1+ǫ
t1−ǫ
δ(t − t1)dt = 1 , ∀ ǫ > 0
∫ +∞
−∞
f (t)δ(t − t1)dt = f (t1) , ∀ f (t) contınua em t1

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
ti
u(ti)
u(ti )δ∆(t − ti )∆
t
u(t)
u(t) ∼=∑
i
u(ti)δ∆(t − ti)∆
Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Resposta ao pulso
Considere gδ(t, ti) a saıda no instante t do sistema excitado pelopulso u(t) = δ∆(t − ti) aplicado no instante ti . Entao
δ∆(t − ti)→ gδ(t, ti )
δ∆(t − ti)u(ti )∆→ gδ(t, ti)u(ti )∆ (homogeneidade)
∑
i
δ∆(t − ti)u(ti )∆→∑
i
gδ(t, ti)u(ti )∆ (aditividade)
Quando ∆→ 0 o pulso δ∆(t − ti) tende ao impulso aplicado emti , denotado δ(t − ti), e a saıda correspondente e dada por g(t, ti )
Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Resposta ao Impulso
y(t) =
∫ +∞
−∞
g(t, τ)u(τ)dτ
• Sistema Causal ⇐⇒ g(t, τ) = 0 para t < τ
• Sistema Relaxado em t0 ⇐⇒ x(t0) = 0
Sistemas causais e relaxados em t0
y(t) =
∫ t
t0
g(t, τ)u(τ)dτ

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Sistema MIMO
y(t) =
∫ t
t0
G (t, τ)u(τ)dτ
Gq×p(t, τ) =
g11(t, τ) g12(t, τ) · · · g1p(t, τ)g21(t, τ) g22(t, τ) · · · g2p(t, τ)
......
...gq1(t, τ) gq2(t, τ) · · · gqp(t, τ)
Sistema com p entradas e q saıdasgij (t, τ) : resposta no instante t na i -esima saıda devida aoimpulso aplicado no instante τ na entrada j
G (·, τ) : matriz de resposta ao impulso
Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Descricao no Espaco de Estados
• Sistema. linear com parametros concentrados descrito por:
x(t) = A(t)x(t) + B(t)u(t)y(t) = C (t)x(t) + D(t)u(t)
• Equacoes Dinamicas Nao-Lineares (representacao por variaveisde estados tambem para sistemas nao-lineares):
x(t) = h(
x(t), u(t), t)
Equacao de Estado
y(t) = g(
x(t), u(t), t)
Equacao de Saıda
x1(t) = h1
(
x1(t), . . . , xn(t), u1(t), . . . , up(t), t)
x2(t) = h2
(
x1(t), . . . , xn(t), u1(t), . . . , up(t), t)
......
xn(t) = hn
(
x1(t), . . . , xn(t), u1(t), . . . , up(t), t)

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
y1(t) = g1
(
x1(t), . . . , xn(t), u1(t), . . . , up(t), t)
y2(t) = g2
(
x1(t), . . . , xn(t), u1(t), . . . , up(t), t)
......
yq(t) = gq
(
x1(t), . . . , xn(t), u1(t), . . . , up(t), t)
x(t): estado ; u(t): controle ; y(t): saıda
Se hi (·) edhi
dxjsao funcoes contınuas para todo t e
i , j = 1, 2, . . . , n, a equacao de estados possui solucao unica paraquaisquer x(t0) e u(t), t ≥ t0 dados.
Entrada Saıda
u(t), t ≥ t0; x(t0)
→
x(t); y(t), t ≥ t0
Um par entrada-saıda e admissıvel se o sistema e capaz de gerarx(t), y(t), t ≥ t0, dados x(t0), u(t), t ≥ t0.

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Sistemas Lineares Invariantes no Tempo
x(t0)u(t), t ≥ t0
→ y(t), t ≥ t0
Para qualquer T
x(t0 + T )u(t − T ), t ≥ t0 + T
→ y(t−T ), t ≥ t0 (deslocamento no tempo)

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
ttt1 t1 + α
se a entrada e deslocada de α, a saıda tambem sera deslocada deα; a forma da saıda nao se altera.

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Descricao Entrada-Saıda
g(t, τ) = g(t + T , τ + T ) = g(t − τ, 0) = g(t − τ)
Integral de Convolucao
y(t) =
∫ t
0g(t − τ)u(τ)dτ =
∫ t
0g(τ)u(t − τ)dτ
g(t): resposta ao impulso aplicado em t = 0
Sistema causal invariante no tempo: g(t) = 0 para t < 0
Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Matriz Funcao de Transferencia
Transformada de Laplace
Y (s) , L[y(t)] =
∫
∞
0y(t) exp(−st)dt
• integrais de convolucao sao substituıdas por equacoes algebricas
Y (s) =
∫
∞
0
(
∫
∞
0G (t − τ)u(τ)dτ
)
exp(−st)dt
=
∫
∞
0
(
∫
∞
0G (t − τ) exp[−s(t − τ)]dt
)
u(τ) exp(−sτ)dτ
=
∫
∞
0G (v) exp(−sv)dv
∫
∞
0u(τ) exp(−sτ)dτ , G (s)U(s)

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
G (s): Transformada de Laplace de G (t) (Matriz resposta aoimpulso)
• Se p = q = 1 (SISO) → Funcao de Transferencia
• Exige que o sistema esteja relaxado em t = 0
• Nem sempre e uma funcao racional em s (apenas funcoesracionais em s serao estudadas neste curso)
L[δ(t − T )] = exp(−sT )

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Exemplo
Circuito RLC serie
u(t)
R
i
L
C++
−−
y
Ri + Ldi
dt+ y = u(t) , i = C
dy
dt

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Com condicoes iniciais nulas (y(0) = y(0) = 0)
LCs2Y (s) + RCsY (s) + Y (s) = U(s)
Y (s)
U(s)=
1
LCs2 + RCs + 1
R = 3Ω ; L = 1H ; C = 0.5F
Y (s)
U(s)=
2
(s + 1)(s + 2)=
2
s + 1−
2
(s + 2)= G (s)
Resposta ao Impulso:
g(t) = 2 exp(−t)− 2 exp(−2t)

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Para uma entrada qualquer,
y(t) =
∫ t0
−∞
g(t − τ)u(τ)dτ +
∫ t
t0
g(t − τ)u(τ)dτ , t ≥ t0
∫ t0
−∞
g(t − τ)u(τ)dτ =
2exp(−t)
∫ t0
−∞
exp(τ)u(τ)dτ − 2 exp(−2t)
∫ t0
−∞
exp(2τ)u(τ)dτ
= 2exp(−t)c1 − 2 exp(−2t)c2 , t ≥ t0
Determinacao de c1 e c2
y(t0) = 2 exp(−t0)c1 − 2 exp(−2t0)c2
y(t0) = −2 exp(−t0)c1 + 4exp(−2t0)c2

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Se y(t0) (tensao no capacitor) e Cy(t0) (corrente no indutor)forem conhecidas, entao a saıda pode ser unicamente determinadapara t ≥ t0 mesmo que o sistema nao esteja relaxado em t0.
y(t0), y (t0) , c1, c2 → Estado do Circuito em t0
Note que a informacao (estado) necessaria para determinarunicamente a resposta do sistema nao e unica, e que pode haverredundancia.
O estado nao necessariamente tem interpretacao fısica nem precisaser representado por um numero finito de valores.

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Funcao racional em s
G (s) =N(s)
D(s)
N(s): polinomio numerador ; D(s): polinomio denominador• G (s) propria
⇔ grau de D(s) ≥ grau de N(s)• G (s) estritamente propria
⇔ grau de D(s) > grau de N(s) ⇔ G (∞) = 0• G (s) bipropria
⇔ grau de D(s) = grau de N(s) ⇔ G (∞) = constante 6= 0
• G (s) impropria⇔ grau de D(s) < grau de N(s) ⇔ | G (∞) | = ∞
Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Polos e zeros de funcao de transferencia
• p ∈ C e um polo de G (s) =N(s)
D(s)se | G (p) | =∞
• z ∈ C e um zero de G (s) =N(s)
D(s)se | G (z) | = 0
Se D(s) e N(s) sao coprimos (isto e, nao possuem fatores comunsde grau 1 ou maior), todas as raızes de N(s) sao zeros de G (s) etodas as raızes de D(s) sao polos de G (s).
G (s) = k(s − z1)(s − z2) · · · (s − zm)
(s − p1)(s − p2) · · · (s − pn)

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Matriz racional G (s)
• Propria: G (∞) constante
• Estritamente Propria: G (∞) = 0
• Bipropria: G (s) quadrada, G (s) e G (s)−1 proprias.

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Polos e zeros de matriz de funcoes de transferencia
• p e um polo de G (s) se ele e um polo de algum elemento deG (s)
• Varias definicoes de zero (p. ex. zeros de transmissao)

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Sistema Dinamico Linear Invariante no Tempo
Equacao no Espaco de Estados
x(t) = Ax(t) + Bu(t)y(t) = Cx(t) + Du(t)
p entradas, q saıdas e n estados
A (n × n), B (n × p), C (q × n) e D (q × p)
Transformada de Laplace
X (s) = (sI− A)−1x(0) + (sI− A)−1BU(s)
Y (s) = C (sI− A)−1x(0) + C (sI− A)−1BU(s) + DU(s)

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Dados x(0) e U(s), pode-se computar algebricamente X (s) eY (s). A transformada inversa de Laplace fornece x(t) e y(t).Note as duas parcelas da resposta de um sistema linear: respostaao estado inicial nulo e resposta a entrada nula.
Se x(0) = 0
Y (s) = [C (sI− A)−1B + D]U(s) = G (s)U(s)
• Recomenda-se o uso de Matlab e Simulink ou Scilab e Scicospara descrever sistemas, simular (para varias condicoes iniciais eentradas), passar de uma representacao a outra, etc.

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Linearizacao
x(t) = h(
x(t), u(t), t)
y(t) = g(
x(t), u(t), t)
O sistema nao linear acima pode ser aproximado (sob certascondicoes) por um sistema linear.Supondo que para certas condicoes iniciais e para uma certaentrada u0(t), a solucao do sistema e x0(t), ou seja
x0(t) = h(
x0(t), u0(t), t)

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Para alguns sistemas nao lineares, se a entrada e ligeiramenteperturbada u0(t) + u(t), a solucao difere apenas um poucox0(t) + x(t) com x(t) pequeno para todo t.
x0(t) + ˙x(t) = h(
x0(t) + x(t), u0(t) + u(t), t)
=
= h(
x0(t), u0(t), t)
+∂h
∂xx +
∂h
∂uu + · · ·
Para h =[
h1 h2 h3
]
′
, x =[
x1 x2 x3
]
′
e u =[
u1 u2
]
′
Jacobianos:
A(t) ,∂h
∂x=
∂h1/∂x1 ∂h1/∂x2 ∂h1/∂x3
∂h2/∂x1 ∂h2/∂x2 ∂h2/∂x3
∂h3/∂x1 ∂h3/∂x2 ∂h3/∂x3
B(t) ,∂h
∂u=
∂h1/∂u1 ∂h1/∂u2
∂h2/∂u1 ∂h2/∂u2
∂h3/∂u1 ∂h3/∂u2
Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Sistema Linearizado
˙x(t) = A(t)x(t) + B(t)u(t)
No caso geral, A e B podem ser funcoes do tempo (computadosao longo das trajetorias de x0(t) e u0(t)).
A equacao linearizada e obtida desprezando-se as potenciasmaiores de x e u
Procedimento similar pode ser aplicado para y(t) = f (x(t), u(t), t)
• A linearizacao nem sempre se aplica: para alguns sistemas naolineares, uma diferenca infinitesimal nas condicoes iniciais podegerar solucoes completamente diferentes (hipersensibilidade ascondicoes iniciais, caos).

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Exemplo: mola
Forca
rompimentoy
y
y = 0
y1
y2
Comportamento linear para deslocamentos no intervalo [y1, y2]
Teoria de Sistemas Lineares I
Descricao matematica de sistemas
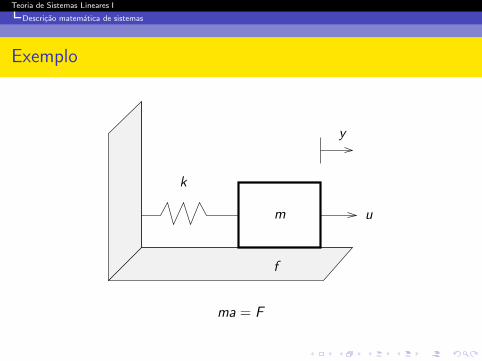
Exemplo
u
y
m
f
k
ma = F
Teoria de Sistemas Lineares I
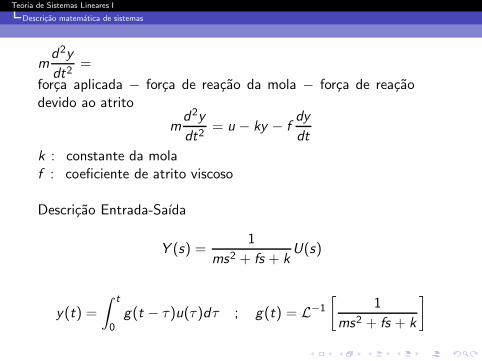
Descricao matematica de sistemas
md2y
dt2=
forca aplicada − forca de reacao da mola − forca de reacaodevido ao atrito
md2y
dt2= u − ky − f
dy
dt
k : constante da molaf : coeficiente de atrito viscoso
Descricao Entrada-Saıda
Y (s) =1
ms2 + fs + kU(s)
y(t) =
∫ t
0g(t − τ)u(τ)dτ ; g(t) = L−1
[
1
ms2 + fs + k
]
Teoria de Sistemas Lineares I
Descricao matematica de sistemas
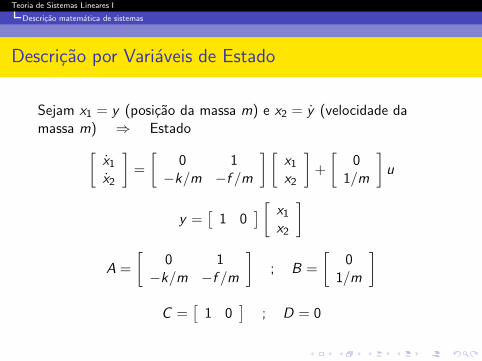
Descricao por Variaveis de Estado
Sejam x1 = y (posicao da massa m) e x2 = y (velocidade damassa m) ⇒ Estado
[
x1
x2
]
=
[
0 1−k/m −f /m
] [
x1
x2
]
+
[
01/m
]
u
y =[
1 0]
[
x1
x2
]
A =
[
0 1−k/m −f /m
]
; B =
[
01/m
]
C =[
1 0]
; D = 0

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Por exemplo: m = 1, f = 3, k = 2
Resposta ao Impulso: g(t) = L−1
[
1
s2 + 3s + 2
]
= L−1
[
1
s + 1−
1
s + 2
]
= exp(−t)− exp(−2t)
y(t) =
∫ t
0(exp[−(t − τ)]− exp[−2(t − τ)]) u(τ)dτ
Teoria de Sistemas Lineares I
Descricao matematica de sistemas
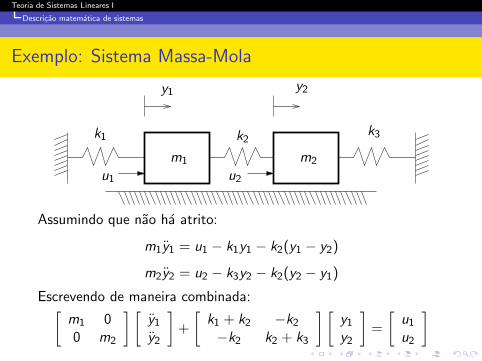
Exemplo: Sistema Massa-Mola
u1 u2
y1 y2
k1 k2k3
m1 m2
Assumindo que nao ha atrito:
m1y1 = u1 − k1y1 − k2(y1 − y2)
m2y2 = u2 − k3y2 − k2(y2 − y1)
Escrevendo de maneira combinada:[
m1 00 m2
] [
y1
y2
]
+
[
k1 + k2 −k2
−k2 k2 + k3
] [
y1
y2
]
=
[
u1
u2
]

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Definindo: x1 , y1, x2 , y1, x3 , y2, x4 , y2 (equacoes deestado):
x ,[
x1 x2 x3 x4
]
′
x =
0 1 0 0
−k1+k2m1
0 k2m1
0
0 0 0 1k2m2
0 −k3+k2m2
0
x +
0 01/m1 0
0 00 1/m2
[
u1
u2
]
y ,
[
y1
y2
]
=
[
1 0 0 00 0 1 0
]
x

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Descricao Entrada Saıda
• Aplicando a Transformada de Laplace (condicoes iniciais nulas):
m1s2Y1(s) + k1Y1(s) + k2(Y1(s)− Y1(s)) = U1(s)
m2s2Y2(s) + k3Y2(s) + k2(Y2(s)− Y1(s)) = U2(s)
Matriz de Transferencia:
Y1(s)
Y2(s)
=1
d(s)
m2s2 + k3 + k2 k2
k2 m1s2 + k1 + k2
U1(s)
U2(s)

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
d(s) , (m1s2 + k1 + k2)(m2s
2 + k3 + k2)− k22
• Se k2 = 0 =⇒ dois sistemas desacoplados (matriz detransferencia bloco-diagonal).
Y1(s) =1
m1s2 + k1U1(s) ; Y2(s) =
1
m3s2 + k3U2(s)
• A matriz de transferencia pode ser obtida elemento a elemento,fazendo-se inicialmente U1(s) = 0 e depois U2(s) = 0 (princıpio dasuperposicao)

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Exemplo: Carro com Pendulo Invertido
H
V
θ
u
y
l
M
m
mg
Assume-se que o movimento se da no plano e desprezam-se oatrito e a massa da haste. O objetivo e manter o pendulo naposicao vertical.

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
H,V : forcas horizontal e vertical exercidas pelo carro no pendulo
Massa M: Md2y
dt2+ H = u
Massa m:
md2
dt2
(
y + l sin(θ))
= H Horizontal
mg = md2
dt2
(
l cos(θ))
+ V Vertical
=⇒ H = my + ml θ cos θ −ml θ2 sin θ=⇒ mg − V = −ml θ sin θ −ml θ2 cos θ
Movimento rotacional da massa m:
ml2θ = mgl sin θ + Vl sin θ − Hl cos θ

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
• Sao equacoes nao lineares; no entanto, pode-se assumir que θ eθ sao pequenos (pendulo na posicao vertical).
sin θ ∼= θ ; cos θ ∼= 1 ; θ2, θ2, θθ, θθ → 0
H = my + ml θ ; V = mg
My = u −my −ml θ
ml2θ = mglθ + mglθ −(
my + ml θ)
l
Re-arranjando:
(
M + m)
y + ml θ = u
2l θ − 2gθ + y = 0
Teoria de Sistemas Lineares I
Descricao matematica de sistemas
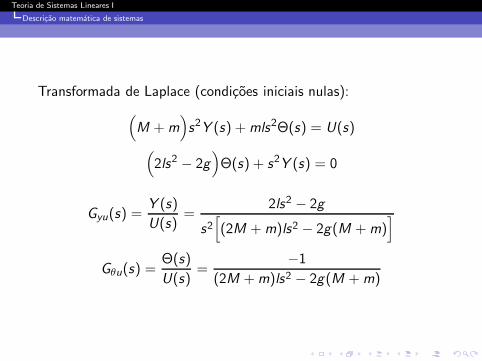
Transformada de Laplace (condicoes iniciais nulas):
(
M + m)
s2Y (s) + mls2Θ(s) = U(s)
(
2ls2 − 2g)
Θ(s) + s2Y (s) = 0
Gyu(s) =Y (s)
U(s)=
2ls2 − 2g
s2[
(2M + m)ls2 − 2g(M + m)]
Gθu(s) =Θ(s)
U(s)=
−1
(2M + m)ls2 − 2g(M + m)

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Definindo x1 = y , x2 = y , x3 = θ, x4 = θ
x ,[
x1 x2 x3 x4
]
′
Resolvendo as equacoes para y e θ:
y = −2gm
2M + mθ +
2
2M + mu
θ =2g(M + m)
(2M + m)lθ −
1
(2M + m)lu

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Equacoes de Estado
x =
0 1 0 0
0 0−2mg
2M + m0
0 0 0 1
0 02g(M + m)
(2M + m)l0
x +
0
2
2M + m
0
−1
(2M + m)l
u
y =[
1 0 0 0]
x
• Livros de analise linear (graduacao e pos): outros modelos• Enfase do curso: modelos de circuitos eletricos

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Exemplo: circuito eletrico
u(t)
R
i
LC1
C2
v1
v2+
+ ++
−
− −− y
Um bipolo (dispositivo contendo 2 terminais condutores) secaracteriza pela relacao tensao-corrente.Resistor, Capacitor e Indutor lineares (convencao de receptor):
replacements
iR iC iL++ +
−−−
vRvC vLR LC

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Fontes de Tensao e de Corrente (convencao de gerador):
replacements
ii
v v
+
+
+
−
−
−
uv (t) ui(t)
v = uv (t) i = ui(t)
Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Convencao Utilizada: em geral, a convencao de receptor e utilizadapara os bipolos passivos e a de gerador para as fontes.
No: Um ponto de ligacao entre 2 ou mais bipolos.
• Lei das Correntes ou 1a Lei de Kirchhoff: a soma algebrica dascorrentes que saem de um no e nula.
Laco: Qualquer percurso fechado formado por bipolos que naopasse duas vezes pelo mesmo no.
• Lei das Tensoes ou 2a Lei de Kirchhoff: a soma algebrica dastensoes nos bipolos pertencentes a um laco e nula.

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Em um circuito com b bipolos e n nos tem-se:
2b variaveis (tensoes e correntes nos bipolos)b equacoes de bipolosn − 1 equacoes de correnteb − (n − 1) equacoes de tensao.

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Circuito
u(t)
R
i = C2v2
(u − v1)/R
C1v1
L
N
C1
C2
v1
v2
+
+
++
−
−
−− y = vL = L
di
dt
• No N:u − v1
R= C1v1 + C2v2 = C1v1 + i
• Laco da direita: v1 = v2 + Ldi
dt

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Definindo x1 = v1, x2 = v2 e x3 = i obtem-se as equacoes deestado:
x1 = −1
RC1x1 −
1
C1x3 +
1
RCu
x2 =1
C2x3 ; x3 =
1
L(x1 − x2)
Equacao de saıda: y = Lx3 = L(x1 − x2)
x =
−1/RC1 0 −1/C1
0 0 1/C2
1/L −1/L 0
x +
1/RC1
00
u
y =[
1 −1 0]
x

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Breve historico: Entrada-Saıda × Variaveis de Estado
• Entrada-Saıda (anterior a 1960)
- descreve apenas a relacao entrada-saıda do sistema;- aplica-se somente a sistemas relaxados;- pode ser obtida atraves de medidas diretas:
· resposta ao ‘impulso’;
· resposta em frequencia.
• Variaveis de Estado (posterior a 1960)
- inclui a representacao interna do sistema;- aplica-se a sistemas com condicoes iniciais quaisquer;- pode ser de difıcil determinacao para sistemas complexos;- essencial no estudo de problemas de Controle Otimo;- solucao facilmente implementada em computador.
Teoria de Sistemas Lineares I
Descricao matematica de sistemas
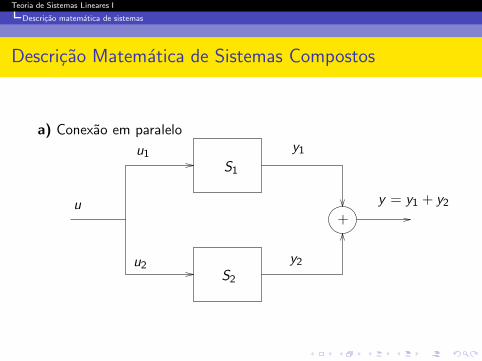
Descricao Matematica de Sistemas Compostos
a) Conexao em paralelo
+u
u1
u2
S1
S2
y1
y2
y = y1 + y2
Teoria de Sistemas Lineares I
Descricao matematica de sistemas
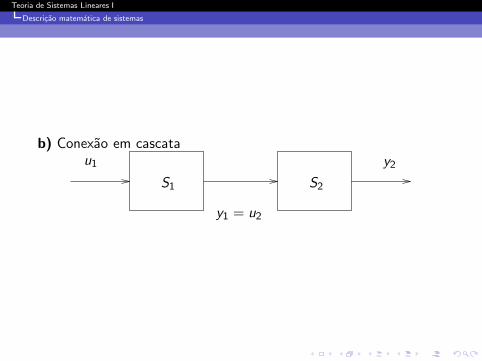
b) Conexao em cascata
S1 S2
u1 y2
y1 = u2

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
c) Conexao com realimentacao
S1
S2
u1 y1
y2
y+
−
u
u2

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Representacao em Variaveis de Estado
S1
x1 = A1x1 + B1u1
y1 = C1x1 + E1u1
S2
x2 = A2x2 + B2u2
y2 = C2x2 + E2u2
a)
[
x1
x2
]
=
[
A1 00 A2
] [
x1
x2
]
+
[
B1
B2
]
u
y =[
C1 C2
]
[
x1
x2
]
+ (E1 + E2)u
Teoria de Sistemas Lineares I
Descricao matematica de sistemas
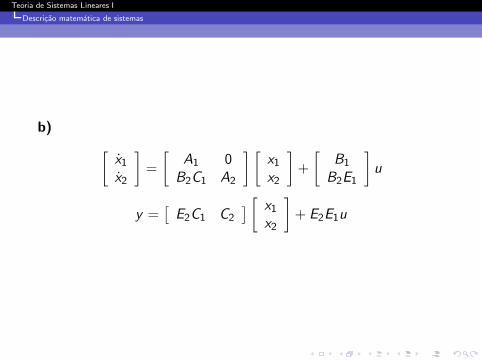
b)
[
x1
x2
]
=
[
A1 0B2C1 A2
] [
x1
x2
]
+
[
B1
B2E1
]
u
y =[
E2C1 C2
]
[
x1
x2
]
+ E2E1u

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
c)
[
x1
x2
]
=
[
A1 − B1Y2E2C1 −B1Y2C2
B2Y1C1 A2 − B2Y1E1C2
] [
x1
x2
]
+
+
[
B1Y2
B2Y1E1
]
u
y =[
Y1C1 −Y1E1C2
]
[
x1
x2
]
+ Y1E1u
Y1 , (I + E1E2)−1 ; Y2 , (I + E2E1)
−1
Y1, Y2 devem existir ∀ t

Teoria de Sistemas Lineares I
Descricao matematica de sistemas
Representacao na frequencia
G1(s) ←→ S1 ; G2(s) ←→ S2
a) G1 + G2
b) G2G1
c) Sejam G1 e G2 matrizes racionais proprias de S1 e de S2. Entao,se det(Iq + G1G2) 6= 0 (condicao necessaria para a conexao)
G = G1(Ip + G2G1)−1 = (Iq + G1G2)
−1G1

Teoria de Sistemas Lineares I
Sistemas discretos
Definicoes
u[k] = u(k T )
y [k] = y(k T )
onde k ∈ Z e T e o perıodo deamostragem.
Sistema causal
A saıda atual depende apenas da entrada atual e anteriores.
Estado no instante k0, x(k0)
E a informacao no instante k0, que com a entrada u[k], k ≥ k0,determina a saıda y [k], k ≥ k0.
Sistema a parametros concentrados e distribuıdos
Se o numero de variaveis de estado for finito entao o sistema e aparametros concentrados. Caso contrario e a parametrosdistribuıdos.

Teoria de Sistemas Lineares I
Sistemas discretos
Sistemas com retardo
Todo sistema com retardo e distribuıdo no caso de sistemascontınuos.Para sistemas discretos, se o retardo for um multiplo inteiro doperıodo de amostragem T entao e a parametros concentrados.
Teoria de Sistemas Lineares I
Sistemas discretos
Sistemas discretos lineares
O sistema discreto e linear se as propriedades de aditividade ehomogeneidade se aplicam.A resposta de um sistema discreto linear e obtida como:
Resposta total
Resposta = resposta ao estado zero + resposta a entrada zero
Teoria de Sistemas Lineares I
Sistemas discretos
Descricao entrada-saıda
• Seja δ[k] a sequencia de impulsos
δ[k −m] =
1 se k = m
0 se k 6= m
• Esta sequencia, ao contrario do caso contınuo, pode sergerada facilmente.
• Seja u[k] a sequencia de entrada. Entao
u[k] =
∞∑
m=−∞
u[m] δ[k −m]

Teoria de Sistemas Lineares I
Sistemas discretos
Expressao da saıda
• Seja g [k,m] a saıda no instante k excitada por um impulsoaplicado no instante m.
• Entao:
δ[k −m] → g [k,m]δ[k −m] u[m] → g [k,m] u[m] homogeneidade
∑
m δ[k −m] u[m] →∑
m g [k,m] u[m] aditividade
• Entao a resposta y [k] excitada por uma entrada u[k] e:
y [k] =
∞∑
m=−∞
g [k,m] u[m]

Teoria de Sistemas Lineares I
Sistemas discretos
Resposta para sistemas causais
• g [k,m] e a sequencia de resposta ao impulso.
• Em um sistema causal g [k,m] = 0 para k < m.
• Se o sistema for relaxado em k0:
y [k] =k∑
m=k0
g [k,m] u[m]
• Se o sistema for invariante no tempo, entao o deslocamentono tempo e valido (k0 = 0):
y [k] =
k∑
m=0
g [k −m] u[m] =
k∑
m=0
g [m] u[k −m]

Teoria de Sistemas Lineares I
Sistemas discretos
Convolucao discreta
• Seja a transformada z y(z) , Z [y [k]] ,∑
∞
k=0 y [k] z−k
• Entao
y(z) =
∞∑
k=0
(
∞∑
m=0
g [k −m] u[m]
)
z−(k−m) z−m =
=
∞∑
m=0
(
∞∑
k=0
g [k −m] z−(k−m)
)
u[m] z−m =
=
(
∞∑
l=0
g [l ] z−l
)(
∞∑
m=0
u[m] z−m
)
= g(z) u(z)
onde l = k −m
• g [l ] = 0 para l < 0 (ou seja para k < m ) e daı o limite l = 0.

Teoria de Sistemas Lineares I
Sistemas discretos
Funcao de transferencia discreta
• Entao:y(z) = g(z) u(z)
• g(z) e a funcao de transferencia discreta
• g(z) e a transformada z da sequencia de resposta ao impulsog [k].

Teoria de Sistemas Lineares I
Sistemas discretos
Exemplo
Seja o sistema com retardo de tempo de um perıodo deamostragem
y [k] = u[k − 1]
Entao g [k] = δ[k − 1], ou seja, a sequencia de resposta ao impulsoaplicado em k = 0 para k = 0, 1, 2, . . . e 0, impulso em k = 1,0, 0, . . . .A funcao de transferencia e
g(z) = Z [δ(k − 1)] = z−1 =1
z
Esta e uma funcao racional de z , que corresponde a parametrosconcentrados.

Teoria de Sistemas Lineares I
Sistemas discretos
Exemplo
Σ a Retardo unitarior [k] u[k] y [k]+
−
Σ a z−1r [k] u[k] y [k]+
−
Portanto:
g(z) =a z−1
1− a z−1=
a
z − a
que e funcao racional de z
Teoria de Sistemas Lineares I
Sistemas discretos
Outra forma
Transformada z da sequencia de resposta ao impulso:
y [k] = a δ[k − 1] + a y [k − 1]
y [k − 1] = a δ[k − 2] + a y [k − 2]
y [k − 2] = a δ[k − 3] + a y [k − 3]
Portanto
y [k] = a δ[k − 1] + a2 δ[k − 2] + a[3] δ[k − 3] + . . .
ou
y [k] =
∞∑
m=1
am δ[k −m]

Teoria de Sistemas Lineares I
Sistemas discretos
A resposta ao impulso e gf [k] =∑
∞
m=1 am δ[k −m]Desde que Z [δ[k −m]] = z−m
gf (z) = Z [gf [k]] = a z−1 + a2 z−2 + a3 z−3 + · · · =
= a z−1∞∑
m=0
(
a z−1)m
=a z−1
1− a z−1

Teoria de Sistemas Lineares I
Sistemas discretos
Funcoes de transferencia irracionais
• Seja
g [k] =
[
0 para k ≤ 01k
para k = 1, 2, . . .
• Desde que Z [g [k]] =∑
∞
m=0 g [k] z−k
g(z) = z−1 +1
2z−2 +
1
3z−3 + · · · = −ln(1− z−1)
• Entao g(z) = −ln(1− z−1) e irracional

Teoria de Sistemas Lineares I
Sistemas discretos
Funcoes proprias ou improprias
• Funcoes de transferencia discretas podem ser proprias ouimproprias
• Exemplo: Sejay(z)
u(z)=
z2 + 2 z − 1
z − 0.5
y [k + 1]− 0.5 y [k] = u[k + 2] + 2 u[k + 1]− u[k]
y [k + 1] = 0.5 y [k] + u[k + 2] + 2 u[k + 1]− u[k]
• Logo o sistema e nao causal

Teoria de Sistemas Lineares I
Sistemas discretos
Causalidade no caso contınuo
• Seja g(s) = s. Entao y(t) =du(t)
dt• Se a defivada for definida como:
y(t) =du(t)
dt= lim
∆→0
u(t + ∆)− u(t)
∆
entao y(t) depende de u(t + ∆) e a derivada e nao causal.
• Se a derivada for definida como
y(t) =du(t)
dt= lim
∆→0
u(t)− u(t −∆)
∆
entao a diferenciacao e causal. No entanto, ruıdos(componentes de alta frequencia) serao amplificados.

Teoria de Sistemas Lineares I
Sistemas discretos
Equacoes de estado
• O sistema discreto e representado por:
x[k + 1] = A[k] x[k] + B[k] u[k]
y [k] = C[k] x[k] + D[k] u[k]
• Pra sistemas invariantes no tempo:
x[k + 1] = Ax[k] + B u[k]
y[k] = Cx[k] + D u[k]

Teoria de Sistemas Lineares I
Sistemas discretos
Funcao de transferencia
Seja
x(z) = Z [x[k]] =
∞∑
k=0
x[k] z−k
Entao
Z [x[k + 1]] =
∞∑
k=0
x[k + 1] z−k = z
∞∑
k=0
x[k + 1] z−(k+1) =
= z
[
∞∑
l=1
x[l ] z−l + x(0) − x(0)
]
= z (x(z)− x(0))

Teoria de Sistemas Lineares I
Sistemas discretos
Funcao de transferencia
Nas equacoes de estado
z x(z)− z x[0] = A x(z) + B u(z)
y(z) = C x(z) + D u(z)
Entao
x = (z I− A)−1 z x[0] + (z I− A)−1 B u(z)
y(z) = C (z I− A)−1 z x[0] + C (z I− A)−1 B u(z) + D u(z)

Teoria de Sistemas Lineares I
Sistemas discretos
• Se x[0] = 0
y(z) =[
C (z I)−1 B + D]
u(z)
• Funcao de transferencia
G (z) = C (z I)−1 B + D





























