Embed Size (px)
Citation preview

TRABALHO DE CONCLUSÃO DO CURSO TÉCNICO EM ELETRÔNICA
Estação de Solda BGA
Eduardo Nogiri Graziela Queiroz
Paulo Adriano
Professor (es) Orientador(es): Larry Aparecido Aniceto
São Caetano do Sul / SP 2014
Centro Estadual de Educação Tecnológica Paula Souza
GOVERNO DO ESTADO DE SÃO PAULO
Etec “JORGE STREET”

Estação de Solda BGA
Trabalho de Conclusão de Curso apresentado como pré-requisito para obtenção do Diploma de Técnico em Eletrônica.
São Caetano do Sul / SP 2014

RESUMO
Desenvolver uma máquina alternativa para reparar chip set, processadores,
memórias, etc. baseado em BGA (BALL GRID ARRAY). Utilizando-se de materiais
de baixo custo, porém de alta qualidade e confiabilidade, de modo que seja capaz
de fazer o mesmo trabalho de máquinas importadas, visto que no mercado nacional
não existe nada similar.
Palavras-chave: BGA, Reparo e Ferramenta de Bancada de TI

LISTA DE FIGURAS
Figura 1 – Principais Componentes da Estação de Solda ........................................ 10
Figura 2 – BGA .......................................................................................................... 11
Figura 3 – Rele de Estado Sólido. ............................................................................. 12
Figura 4 – Tipos de Contatos Semicondutores do Rele de Estado Sólido ................ 13
Figura 5 – Rele de Pequena Corrente ....................................................................... 14
Figura 6 – Rele de Pequena Corrente Acoplada a um Transistor de Potência ......... 14
Figura 7 - Rele de Estado Sólido com Opto-Diac Interligado a um Triac. ................. 15
Figura 8 – Diversos Tipos de Termopares. ............................................................... 16
Figura 9 – Esquema de um Termopar. ...................................................................... 16
Figura 10 – Esquema Elétrico do PID ....................................................................... 19
Figura 11 – Controlador ON-OFF .............................................................................. 21
Figura 12 – Detalhamento do chaveamento de R pelo controlador ON-OFF ............ 21
Figura 13 – Ação de um controle proporcional .......................................................... 22
Figura 14 – Diagrama eletrônico de um controle proporcional .................................. 23
Figura 15 – Ilustração do Off-Set .............................................................................. 24
Figura 18 – Diagrama de Blocos ............................................................................... 27

Sumário
INTRODUÇÃO ...................................................................................................................................................... 9
1 – DESCRIÇÃO DO FUNCIONAMENTO ..................................................................................................... 10
1.1 – BGA .................................................................................................................. 11
1.2 – Rele de Estado Sólido ...................................................................................... 11
1.2.1 – Tipos de Relés de Estado Sólido .................................................................. 13
1.2.1.1 – Relés pequenos para DC ........................................................................... 14
1.2.1.2 – Relés AC para Controle de Energia a Partir da Rede ................................ 15
1.3 – Termopar .......................................................................................................... 15
1.3.1 – Termopares Tipo K ........................................................................................ 16
1.3.2 – Outros Tipos de Termopares ......................................................................... 18
1.4 – P.I.D. ................................................................................................................ 19
1.4.1 – Controle on-off ou Controle “Liga e Desliga”. ................................................ 20
1.4.2 – Controle Proporcional (P) .............................................................................. 21
1.4.3 – Controle Integral (I)........................................................................................ 25
2 – PLANEJAMENTOS DO PROJETO.......................................................................................................... 27
2.1 – Previsões de Custos......................................................................................... 27
2.2 – Diagrama de Blocos ......................................................................................... 27
2.3 – Cronogramas Gerais ........................................................................................ 28
3 – DESENVOLVIMENTOS DO PROJETO .................................................................................................. 29
4 – RESULTADOS OBTIDOS .......................................................................................................................... 30
CONCLUSÃO ..................................................................................................................................................... 31
REFERÊNCIAS .................................................................................................................................................. 32

9
INTRODUÇÃO
A estação de Retrabalho BGA se propõem ao reparo de circuitos elétricos
baseados em componentes smd, mas propriamente dito, aqueles componentes cuja
a fixação na placa se faz através da fusão das esferas de estanho e prata entre o
componente e a placa de circuito.
Tema e delimitação
O projeto se enquadra na área de reparo de componentes eletrônicos
voltados a informática. Exemplo notebooks, PC, Placas de vídeo e demais
equipamentos que se utilizam de chips sets BGA.
Objetivos – geral e específico(s)
O objetivo deste estudo é apresentar uma solução baseados em materiais de
baixo custo no reparo de aparelhos eletroeletrônicos que se utilizam de chip set
BGA. O custo das máquinas importadas para reparo é muito elevado, trazendo um
inconveniente financeiro ao técnico de TI e inviabilizando sua aquisição.
Justificativa
A justificativa para este projeto é o desenvolvimento e aprimoramento de um
modelo já existente no mercado, porém, de alto custo. Neste projeto procuraremos
materiais de fácil aquisição no mercado nacional que não ficam devendo em nada
aos produtos de origem importado.
Metodologia
O método adotado para o planejamento do trabalho de conclusão de curso
será adotado com método científico. Onde pesquisaremos dados técnicos, em livros
revistas e sites de abordagem técnica.
Através de pesquisas individuais, reuniões periódicas onde foram discutidas
as melhores alternativas para a conclusão do projeto.

10
1 – Descrição do Funcionamento
As estações de Retrabalho de BGAs são muito utilizadas nos laboratórios de
oficinas de reparo de microcomputadores e Notebooks, no que se refere ao reparo
de BGA (Ball Grid Array). Esta máquina possui um pré-aquecedor que será usado
para aplicação de calor na parte inferior da placa a ser retrabalhada para que a
mesma não empene quando o jato de ar superior atingir a placa. O aquecedor
superior será responsável pela fusão das esferas que soldam o chip BGA. Ao ligar
temos dois aquecimentos, um do pré-aquecimento faz com que a temperatura de
aproximadamente 120ºC e o outro na própria BGA de aproximadamente 220ºC e
retirando o chip BGA para sua limpeza. Um esquema com os principais
componentes da estação de solda BGA é mostrado na Figura 1.
Figura 1 – Principais Componentes da Estação de Solda

11
1.1 – BGA
BGA (Ball Grid Array) são todos os componentes eletrônicos SMD (Surface-
Mounted Device) cuja fixação na placa de circuitos é feita através de soldagem por
fusão a ar quente utilizando-se diminutas esferas de estanho e prata. Alguns
exemplos de BGA são processadores, chip sets, Eproms, memórias e etc. A Figura
2 mostra tipos de BGA.
Figura 2 – BGA
1.2 – Rele de Estado Sólido
Os Relés de Estado Sólido, ou se adotarmos o nome em inglês Solid-State
Relay com a sigla SSR, são dispositivos semicondutores que tem a mesma função
de comutação de circuitos que os relés mecânicos convencionais possuem. Esses
relés comutam circuitos de potências elevadas a partir de sinais de pequenas
intensidades. Um esquema com os dois tipos de reles é mostrada na Figura 3.

12
Figura 3 – Rele de Estado Sólido.
São componentes semicondutores capazes de manusear correntes elevadas
a partir de pequenos sinais; Os reles de estado sólido são componentes de alta
potência sensíveis à luz que podem resultar em excelentes opções de relés que
substituem as versões tradicionais mecânicas. Os relés de estado sólido, por suas
vantagens, são cada vez mais utilizados aparecendo em configurações as mais
diversas.
Os relés de estado sólido derivam dos chamados opto-acopladores ou “opto-
couplers” que consistem num emissor de luz (geralmente um LED infravermelho) e
um foto sensor, que pode ser um foto-transistor, foto-diac, fotodiodo, ou quaisquer
outros dispositivos sensíveis à luz. Os opto-acopladores, que originalmente são
usados para transferir sinais, podem também serem usados para comutar cargas,
denominando assim o que se conhece por “relé de estado sólido”.
No tipo comum de relé de estado sólido a bobina é substituída por um foto-
emissor, normalmente um LED infravermelho e os contatos são substituídos por um
dispositivo semicondutor sensível à luz como um foto-transistor, fotodiac e fotodiodo
conforme mostra a figura 4.

13
Figura 4 – Tipos de Contatos Semicondutores do Rele de Estado Sólido
O elemento sensível pode então ser usado para comutar um dispositivo de
maior potência como, por exemplo, um TRIAC, um SCR ou mesmo MOSFET de
potência.
Os relés de estado sólido possuem características elétricas importantes
devidas tanto à velocidade de comutação como também ao isolamento. Assim, se
compararmos os relés de estado sólido com os relés mecânicos tradicionais,
veremos que os primeiros têm as seguintes vantagens: não possuem partes móveis;
não há contatos que podem provocar arcos; não existem materiais que se
desgastam com o uso; não há a ocorrência de repique dos contatos (bouncing); não
existe ruído acústico; a vida útil é maior; não há produção de EMI na comutação; a
velocidade de comutação é maior; possuem uma faixa de tensões e correntes de
operação maior
No entanto, também existem as desvantagens a serem consideradas como: o
circuito de saída é sensível podendo ser danificado por sobre tensões; a saída
precisa de uma tensão e corrente mínima para operar; a resistência ON é maior do
que a dos relés convencionais; podem ser mais caros que os relés convencionais;
normalmente está restrito à operação com um único polo; é mais sensível a
transientes; a capacitância de saída é maior; a corrente de fuga no estado OFF é
maior; e há aquecimento quando correntes elevadas são controladas.
No uso dos relés de estado sólido, devido às suas características, é preciso
tomar cuidado quando certos tipos de carga são comutados. Isso é válido para
cargas indutivas, quando existe o perigo de correntes e tensões de surto ser
produzidas no circuito comutado ou ainda quando cargas dinâmicas, como motores
e solenoides são controlados. Também é preciso tomar cuidado quando lâmpadas
incandescentes e elementos de aquecimento são controlados devido à menor
corrente inicial, quando estão ainda frios. O uso com lâmpadas de mercúrio,
fluorescentes e outros circuitos chaveados com altas indutâncias deve ser evitado.
1.2.1 – Tipos de Relés de Estado Sólido
Existem basicamente dois tipos de relés de estado sólido que são
especificados de acordo com a aplicação.

14
1.2.1.1 – Relés pequenos para DC
Os relés de pequena corrente para DC normalmente são fornecidos em
invólucros DIP de seis pinos, conforme esquema da Figura 5.
Figura 5 – Rele de Pequena Corrente
Nesses relés temos como emissor um LED infravermelho. A saída é
tipicamente acoplada a um transistor de potência ou outro dispositivo semicondutor,
de acordo com a figura 6.
Figura 6 – Rele de Pequena Corrente Acoplada a um Transistor de Potência
Existem casos em que o elemento de potência já está embutido no próprio
relé, não havendo assim a necessidade de elementos externos de controle. Nos
circuitos em que a saída contém um MOSFET a resistência no estado ON pode ser
da ordem de 10 ohms ou menor. As tensões de saída podem chegar aos 200 ou 300
V e as correntes entre 100 e 200 mA DC. Como o emissor e o receptor são

15
acoplados opticamente a resistência de isolamento é extremamente elevada
chegando a mais de 500 M ohms com tensões da ordem de 2 000 Volts ou mais.
1.2.1.2 – Relés AC para Controle de Energia a Partir da Rede
Os relés de estado sólido para aplicações em AC normalmente possuem
opto-diacs para serem ligados a um TRIAC externo. Na figura 7 temos um
dispositivo desse tipo. Em alguns casos, o TRIAC já pode estar embutido no próprio
dispositivo.
Figura 7 - Rele de Estado Sólido com Opto-Diac Interligado a um Triac.
A etapa de saída, quando possui um TRIAC embutido, geralmente pode
manusear tensões de 24 a 250 V com correntes da ordem de 1 a 4 ampères. Nos
tipos que possuem o TRIAC embutido deve ser levada em conta que existe uma
queda de tensão de 1 a 1,5 V nesse componente quando em condução. Esse fato é
importante para a determinação do calor gerado no dispositivo ao controlar uma
carga. Para efeitos de cálculo pode-se considerar uma potência de 1,2 W para cada
ampère de corrente conduzida.
1.3 – Termopar
Um termopar ou par termométrico consiste de dois condutores metálicos de
natureza distinta, na forma de metais puros ou ligas homogêneas, sendo
amplamente utilizados nos mais variados processos de medição de temperatura.

16
Figura 8 – Diversos Tipos de Termopares.
O aquecimento de dois metais diferentes com temperaturas diferentes em
suas extremidades gera o aparecimento de uma F.E.M. (da ordem de mV). Este
efeito é conhecido como efeito Seebeck e propiciou a utilização de termopares para
medição de temperatura. Um esquema de um termopar é mostrado na Figura 9. No
nosso objeto de estudo e montagem, o termopar terá a função de monitorar a
temperatura na peça que está sendo retrabalhada, bem como manter a temperatura
constante.
Figura 9 – Esquema de um Termopar.
1.3.1 – Termopares Tipo K
Este Termopar é o mais utilizado na indústria em geral, pois tem uma
excelente resistência à oxidação em alta temperatura e à corrosão em baixas
temperaturas.

17
Formado por fios de Chromel, como termo elemento positivo, e Alumel, como
termo elemento negativo. É adequado para medição contínua desde -200 ºC até
1260 °C. É recomendado para uso contínuo em atmosferas oxidantes ou
completamente inertes.
Não deve ser utilizado em atmosferas redutoras ou que alternam de oxidante
para redutora, atmosferas sulfurosas, vácuo (exceto por períodos curtos) ou em
atmosferas que produzam a corrosão conhecida por "green-rot" do termoelemento
Chromel.
O termopar tipo K é um termopar de uso geral e é mais resistente à oxidação
em temperaturas altas do que os tipos E, J e T. Tem um baixo custo e, devido à sua
popularidade estão disponíveis em diversos tipos de montagens. A longa exposição
em alta temperatura pode provocar o aparecimento de não homogeneidades nos
fios. Tem uma sensibilidade de aproximadamente 41µV/°C.
Tabela 1 – Faixas de Utilização e Limites de Erro para o Termopar tipo K
Nome do
Termoelemento
Faixa de
Utilização (C°)
Limite de Erro
Padrão Especial
(+) Chromel 0 a 1260 ±2,2ºC ou ±0,75% ±1,1ºC ou ±0,4%
(-) Alumel -200 a 0 ±2,2ºC ou ±2% -
Tabela 2 – Temperaturas Limite para as Diversas Bitolas do Termopar Tipo K
Bitola 14 AWG
(1,63 mm)
20 AWG
(0,81 mm)
24 AWG
(0,51 mm)
28 AWG
(0,33 mm)
30 AWG
(0,25 mm)
Temperatura
(ºC) 1090 980 870 870 760

18
1.3.2 – Outros Tipos de Termopares
Existem outros tipos de termopares, também classificados de acordo com o
tipo de material utilizado, sendo eles:
a) Termopares Tipo E
Este termopar é mais utilizado nas atmosferas oxidantes e inertes em
ambiente redutores ou vácuo perdem suas características termoelétricas.
É formado por fios de Chromel, como termoelemento positivo, e Constantan,
como termoelemento negativo. É adequado para medição contínua desde -200 ºC
até 870 °C.
b) Termopares Tipo B
Este termopar possui características de utilização idênticas aos do tipo S e R.
Recomenda-se o tubo de proteção como os S e R em locais onde contenham
vapores de metais. Seus fios possuem uma resistência mecânica maior que os S e
R e geram um sinal termoelétrico muito baixo. Sua utilização é recomendada para
temperaturas altas, e a composição de sua liga é de 70% platina e 30% ródio.
c) Termopares Tipo J
Este termopar é recomendado para utilização no vácuo e em atmosferas
oxidantes. Não é recomendável a utilização deste termopar em locais que
contenham enxofre.
É formado por fios de Ferro puro, como termoelemento positivo, e
Constantan, como termoelemento negativo. É adequado para medição contínua
desde 0 ºC até 760 °C. Não é recomendado o seu uso em temperaturas abaixo de
0ºC devido à oxidação e fragilização do termoelemento Ferro.
d) Termopares Tipo R
Possui as mesmas características de uso e recomendações do Termopar tipo
S, porém sua composição é um pouco diferente contendo 87% platina e 13% ródio.
Este termopar também é utilizado como padrão em laboratórios.

19
e) Termopares Tipo S
Este é o mais conhecido e usado entre os termopares nobres. Possui uma
precisão altíssima e uma ampla faixa de utilização, alta repetibilidade de leitura e
baixa potência termoelétrica. Com todas essas características este termopar é
utilizado em laboratórios de calibração como um termopar padrão. A composição da
sua liga, é de 90% platina e 10% ródio. Recomenda-se este termopar para trabalhos
em locais oxidantes (sempre com tubos de proteção cerâmica), desde que utilizados
em sua faixa de trabalho.
1.4 – P.I.D.
O Significado da palavra PID é Progressivo Integral Derivativo e trata-se de
um controlador de processos que une as ações derivativas, integrais e
proporcionais, fazendo assim com que o sinal de erro seja minimizado pela ação
proporcional, zerado pela ação integral e obtido com uma velocidade antecipativa
pela ação derivativa. Um esquema elétrico do PID é mostrado na Figura 10.
Figura 10 – Esquema Elétrico do PID

20
Na prática os PIDs são encontrados no interior de controladores eletrônicos
chamados single loop, muitas vezes com microprocessadores e também através de
software em controladores programáveis e outros equipamentos de controle.
Um resumo da descrição e funções do PID é mostrado na tabela abaixo:
P Correção Proporcional ao Erro A correção a ser aplicada ao processo
deve crescer na proporção que cresce
o erro entre o valor real e o valor
desejado
I Correção Proporcional ao
Produto Erro x Tempo
Erros pequenos que existem há muito
tempo requerem correção mais intensa.
D Correção Proporcional à Taxa
de Variação do Erro
Se o erro está variando muito rápido,
esta taxa de variação deve ser reduzida
para evitar oscilações.
1.4.1 – Controle on-off ou Controle “Liga e Desliga”.
O sinal de saída tem apenas duas posições que vão de um extremo ao outro,
podendo ser: válvula aberta ou válvula fechada, resistência ligada ou resistência
desligada, compressor ligado ou compressor desligado função do controlador é a de
chavear a resistência tendo como parâmetro o valor de temperatura.

21
Figura 11 – Controlador ON-OFF
Nesse instante a resistência R é ligada através do relé K1 com a função de
elevar a temperatura, devido à característica do processo da temperatura continua
em queda durante algum tempo, antes de manifestar tendência ascendente.
Figura 12 – Detalhamento do chaveamento de R pelo controlador ON-OFF
O uso do controle ON-OFF é ideal em aplicações onde a variável a ser
controlada possui um tempo de resposta lento. Alguns exemplos de controle ON-
OFF: Estufas; Ar-condicionado; Ferro de passar roupa; Refrigeração de motores a
combustão, entre outros.
1.4.2 – Controle Proporcional (P)
Em processos que requerem um controle mais suave que aquele fornecido
pelo controlador ON-OFF, pode ser empregado o controle proporcional (P).
O controle proporcional fornece uma relação linear fixa entre o valor da
variável controlada e o valor que o atuador de controle pode fornecer. Este é um
processo em que a temperatura de operação pode variar de 50ºC a 550ºC. O
elemento controlador tem um raio de ação que fornece ao processo uma faixa de
temperatura que vai de 150ºC a 450ºC. O ponto central é 300ºC com uma faixa de

22
controle de ±150ºC. Quando a temperatura está em 150ºC ou menos, o elemento
controlador é todo aberto. Quando a temperatura está entre 150ºC e 450ºC, o
elemento controlador movimenta-se para uma posição que é proporcional ao valor
da grandeza controlada. A 225ºC o elemento controlador está 75% aberto, a 300ºC
está 50% aberto, a 375ºC está 25% aberto e a 450ºC ou mais o elemento
controlador está 0% aberto, isto é, completamente fechado.
Figura 13 – Ação de um controle proporcional
Com isso temos que a faixa de valores é de 300ºC, porém, esse número
expressa uma porcentagem da faixa total de excursão da temperatura, que é de
500ºC (50ºC até 550ºC), portanto temos que a faixa proporcional expressa
300ºC/500ºC, ou 60% de todo o alcance da escala.
O comportamento desse controlador é através do seu Ganho, que é a relação
entre a porcentagem de variação do elemento controlador pela variação proporcional
da grandeza. Assim temos:
Ganho =
% de variação do elemento controlador
% de variação da grandeza controlada
No nosso exemplo, o ganho seria de:

23
(100% no elemento controlador)
= 1,66
(60% de variação na grandeza)
Podemos dizer então, que: Faixa proporcional = 100/Ganho
Pensando eletronicamente, podemos visualizar um Controle Proporcional na
figura 14, onde temos um circuito subtrator com Amplificadores Operacionais, no
qual, calculamos primeiramente o erro entre o SP e o PV, e depois vem um
amplificador onde amplificamos o erro para corrigir o valor PV alterado pelo
processo. Nessa mesma figura podemos imaginar a seguinte situação: temos que
controlar a velocidade de um motor e partiremos do princípio de que o motor está
rodando na velocidade determinada pelo SP.
Figura 14 – Diagrama eletrônico de um controle proporcional
Uma alteração na carga do motor implicará em uma variação da rotação e,
consequentemente, em uma variação do valor do PV que, por exemplo, está sendo
gerado por um taco gerador;

24
Essa variação implicará em uma alteração de tensão na saída do substrato,
fazendo com que o circuito tente corrigir esse distúrbio alterando a tensão de saída
que está acionando o motor;
A alteração é proporcional ao erro e dada pelo ganho do circuito amplificador
(R 1/R2).
Porém, quando o circuito se estabiliza ele não se estabiliza no set-point (SP),
e sim em um valor fora dele que é chamado de offset (figura 15). Esse erro é uma
característica do circuito proporcional e é maior quanto menor for o ganho do
circuito, tornando-se menor à medida que aumentamos o ganho. Em contrapartida,
quando aumentamos o ganho aumenta-se também a possibilidade de oscilações na
variável do processo, portanto, esse é um parâmetro que deve ser muito bem
otimizado no controlador.
Figura 15 – Ilustração do Off-Set
Para a correção desses off set existe em alguns controladores industriais um
reajuste manual que soma ou subtrai do valor de saída um valor correspondente à
eliminação do offset (no exemplo da figura 15 o ajuste manual soma ou subtrai
tensão).

25
1.4.3 – Controle Integral (I)
Quando se tem um sistema onde utilizamos um controlador proporcional, nas
alterações da carga o reajuste do offset deve ser feito de forma automática, e não
manualmente como citado acima.
Integrando-se o valor do erro no tempo obtemos esse reajuste; na prática o
controle integral é utilizado em conjunto com o controle proporcional formando o
controle proporcional integral.
Figura 16 – Gráfico de um Controle Proporcional Integral
Pode-se entender mais claramente visualizando um circuito eletrônico onde
foi implementada uma ação proporcional com a ação integral, conforme observado
as figuras 17e 18.

26
Figura 17 – Posição Horizontal de Montagem do PI
Figura 18 – Gráfico de um Controle Proporcional Integral

27
2 – Planejamentos do Projeto
2.1 – Previsões de Custos
Os custos previstos dos elementos que compõem a estação BGA estão
relacionados na tabela 3.
Tabela 3 – Apresentação de Custos
Componentes Preço Unitário
(R$/item) Quantidade
Valor Total
(R$)
Rele de Estado Sólido 20,00 2 unid. 40,00
Termopares 5,00 2 unid 10,00
Resistências Térmicas 45,00 2 unid 90,00
PID 100,00 2 unid 200,00
Estrutura Metálica 100,00 1 unid 100,00
Fios 10,00 1 unid 10,00
Djuntores 30,00 4 unin 120,00
Fusível 0,50 2 unid 1,00
Cooler 2,00 2unid 4,00
TOTAL 575,00
2.2 – Diagrama de Blocos
O diagrama de bloco do sistema é apresentado conforme Figura 18:
Figura 18 – Diagrama de Blocos
Resistência Térmica
Rele de Estado Sólido
P.I.D.
Display Teclado
Termopares
28
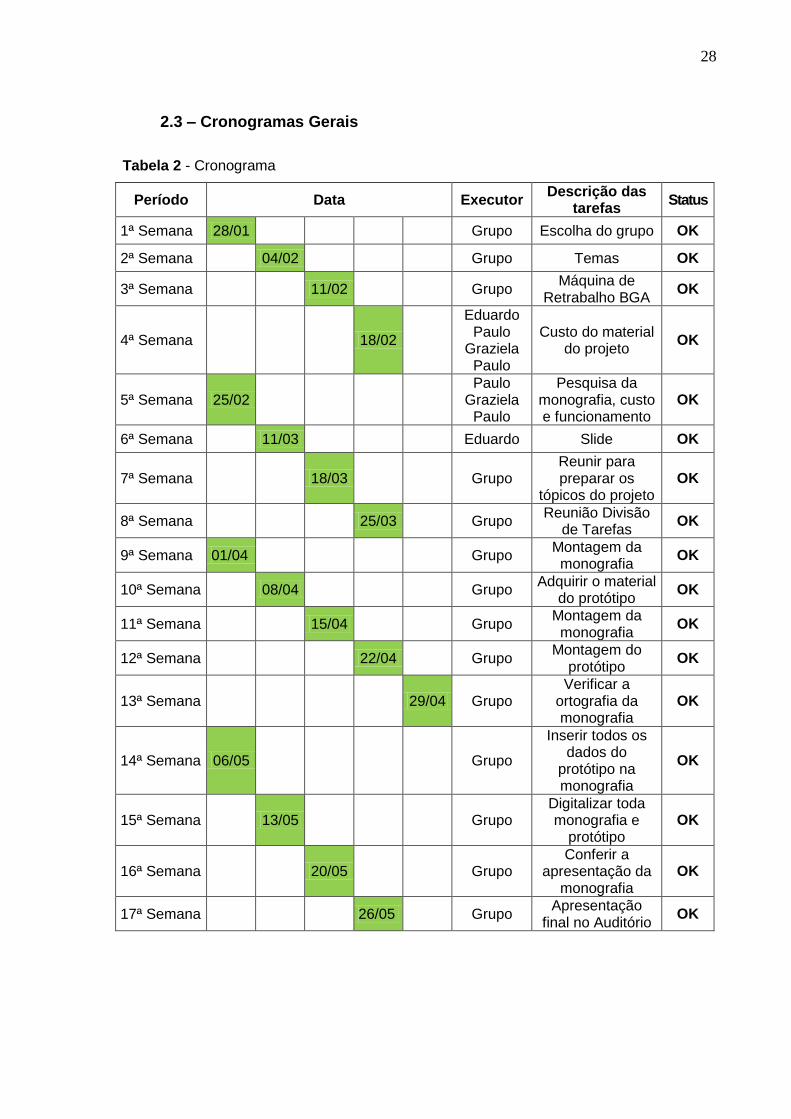
2.3 – Cronogramas Gerais
Tabela 2 - Cronograma
Período Data Executor Descrição das
tarefas Status
1ª Semana 28/01
Grupo Escolha do grupo OK
2ª Semana
04/02
Grupo Temas OK
3ª Semana
11/02
Grupo Máquina de
Retrabalho BGA OK
4ª Semana
18/02
Eduardo Paulo
Graziela Paulo
Custo do material do projeto
OK
5ª Semana 25/02
Paulo Graziela
Paulo
Pesquisa da monografia, custo e funcionamento
OK
6ª Semana
11/03
Eduardo Slide OK
7ª Semana
18/03
Grupo Reunir para preparar os
tópicos do projeto OK
8ª Semana
25/03
Grupo Reunião Divisão
de Tarefas OK
9ª Semana 01/04
Grupo Montagem da monografia
OK
10ª Semana
08/04
Grupo Adquirir o material
do protótipo OK
11ª Semana
15/04
Grupo Montagem da monografia
OK
12ª Semana
22/04
Grupo Montagem do
protótipo OK
13ª Semana
29/04 Grupo Verificar a
ortografia da monografia
OK
14ª Semana 06/05
Grupo
Inserir todos os dados do
protótipo na monografia
OK
15ª Semana
13/05
Grupo Digitalizar toda monografia e
protótipo OK
16ª Semana
20/05
Grupo Conferir a
apresentação da monografia
OK
17ª Semana
26/05
Grupo Apresentação
final no Auditório OK

29
3 – Desenvolvimentos do Projeto
3.1 – Pesquisa em livros e revistas técnicas e na internet pelas pessoas
componentes do grupo.
3.2 – Os testes com componentes pesquisados foram satisfatórios ao
objetivo proposto no projeto, ultrapassando as expectativas.
3.3 – Pesquisa de mercado do valor dos componentes a serem utilizados no
projeto não foi difíceis de achar, a proposito foram muito fáceis de encontrar e com
preços bem acessíveis, conforme tabela de preços informado nesta Monografia.
3.4 – Estudo da viabilidade do projeto foram gastos 80 horas de trabalho e
não houve muita dificuldade na confecção da máquina de retrabalho BGA e seus
periféricos).
3.5 – Distribuição das tarefas a serem executadas no decorrer da manufatura
do projeto foi aceita de comum acordo sem houvesse qualquer sobrecarga a
qualquer participante.

30
4 – Resultados Obtidos
Os resultados obtidos foram satisfatórios, e de acordo com o previsto, a
estação de retrabalho se mostrou muito eficiente, conforme ao que se propuseram,
atingindo todos os critérios de uma máquina ou estação de Solda BGA e
componentes smd. A máquina foi testada e obteve o sucesso de 80% nos consertos
de aparelhos com ela reparados, percentual este excelente para uma máquina de
retrabalho atualmente.

31
Conclusão
O objetivo inicialmente proposto foi totalmente alcançado, os problemas foram
todos resolvidos através de reuniões e pesquisas, o trabalho foi muito estimulante
para o grupo que apresentou moral alto, tendo em vista que está dentro de nossa
área de atuação e agregou muito em nosso conhecimento técnico e pessoal.

32
Referências
Máquinas e equipamentos existentes no mercado internacional voltadas a
manutenção eletrônica de placas e circuitos SMD. (artigos, fóruns e sites
consultados em ordem alfabética).
SEVERINO, Antonio Joaquim. Metodologia do Trabalho Científico. São Paulo: Ed.
Cortez, 2000.
http://www.ecil.com.br/
http://pt.wikipedia.org/wiki/Controlador_proporcional_integral_derivativo
http://www.newtoncbraga.com.br/index.php/como-funciona/1436-art210





























