Embed Size (px)
Citation preview

Controle de Sistemas O Método do Lugar das Raízes
Renato Dourado Maia
Universidade Estadual de Montes Claros
Engenharia de Sistemas

Controle de Sistemas – Renato Dourado Maia
Introdução No projeto de um sistema de controle, é funda-
mental se determinar como a localização das raízes da equação característica no plano S um-da com a variação de um parâmetro. Essa loca-lização das raízes, ou Lugar das Raízes (LR), é normalmente feita por um método gráfico co-nhecido como Gráfico do Lugar das Raízes.
04/11/2014 2/28

Controle de Sistemas – Renato Dourado Maia
Conceito de Lugar das Raízes O Lugar das Raízes, uma apresentação gráfica
dos polos a malha fechada em função da varia-ção de um parâmetro de sistema, é um podero-so método de análise e projeto. Ele permite a-nálises qualitativa e quantitativa, e fornece mais informações do que os demais métodos que já estudamos.
04/11/2014 3/28

Controle de Sistemas – Renato Dourado Maia
Conceito de Lugar das Raízes
Entrada Sinal
atuante
Função de Transferência do canal direto
Função de Transferência da retroação
Saída
(a) Sistema a Malha Fechada. (b) Função de Transferência Equivalente.
Modificações no ganho alteram os polos da
malha fechada!
04/11/2014 4/28

Controle de Sistemas – Renato Dourado Maia
Representação Vetorial de Números Complexos
Plano s
Plano s
Plano s
Plano s
(a)
(b)
(c)
s jσ ω= +
( )s a+( )s a+
(c) (5 2)
( 7)s j
s→ +
+
( )s a+ é um nº complexo, e pode ser representado por um vetor traçado a partir do zero da função até o ponto s.
04/11/2014 5/28

Controle de Sistemas – Renato Dourado Maia
Representação Vetorial de Números Complexos
Cada fator do numerador e do denominador é um número complexo, que pode ser representado por um
vetor. A função define a aritmética complexa a ser executada para calcular F(s) em qualquer ponto s.
1
1
( ) ( )
( )
m
iin
ij
s z fatores complexos do numeradorF s
fatores complexos do denominadors p
=
=
+= =
+
∏ ∏∏∏
04/11/2014 6/28

Controle de Sistemas – Renato Dourado Maia
Representação Vetorial de Números Complexos
( 1)( )( 2)sF s
s s+
=+
Plano s
04/11/2014 7/28

Controle de Sistemas – Renato Dourado Maia
Representação Vetorial de Números Complexos
Considerando a representação vetorial, tem-se, para a magnitude:
1
1
( ) ( )
m
iin
ij
s zcomprimentos dos zerosM
comprimentos dos pólos s p
=
=
+= =
+
∏∏∏ ∏
O comprimento de um zero é a magnitude do vetor traçado a partir do zero de F(s) em –zi até o ponto s, e o comprimento de um polo é a magnitude do vetor traçado a partir do polo de F(s)
em –pi até o ponto s.
04/11/2014 8/28

Controle de Sistemas – Renato Dourado Maia
Representação Vetorial de Números Complexos
Considerando a representação vetorial, tem-se, para o ângulo:
O ângulo de um zero é o ângulo, medido no sentido trigonométrico, a partir do eixo real, de um vetor traçado
do zero de F(s) em –zi até o ponto s, e o ângulo de um pólo é o ângulo, medido no sentido trigonométrico, a partir do eixo real, de um vetor traçado do pólo de F(s) em –pi até o ponto s.
1 1
( ) ( )m n
i ii j
ângulos dos zeros ângulos dos pólos
s z s p
θ
θ= =
= −
= ∠ + − ∠ +
∑ ∑
∑ ∑
04/11/2014 9/28

Controle de Sistemas – Renato Dourado Maia
Conceito de Lugar das Raízes a) O sistema CameraMan® Presenter Camera rastreia auto-maticamente um objeto que uti-liza sensores de infravermelho frontal e traseiro (o sensor fron-tal é também um microfone); co-mandos de rastreamento e de áudio são passados ao Camera-Man por meio de um enlace de radiofrequência de uma unidade utilizada pelo objeto.
(b) Diagrama de blocos.
(c) Função de transferência a malha fechada.
Posição do objeto Sensores Amplificador
Motor e câmara
Posição da câmara
onde
04/11/2014 10/28

Controle de Sistemas – Renato Dourado Maia
Conceito de Lugar das Raízes Localização dos Polos em Função do Ganho do Sistema
Polo 1 Polo 2
–10 –9,47 –8,87 –8,16 –7,24 –5 –5 + j2,24 –5 + j3,16 –5 + j3,87 –5 + j4,47 –5 + j5
0 –0,53 –1,13 –1,84 –2,76 –5 –5 – j2,24 –5 – j3,16 –5 – j3,87 –5 – j4,47 –5 – j5
0 5 10 15 20 25 30 35 40 45 50
04/11/2014 11/28

Controle de Sistemas – Renato Dourado Maia
Conceito de Lugar das Raízes
Plano s
Plano s (a) Diagrama de Polos. (b) Lugar das Raízes.
Que conclusões podemos tirar por meio da análise do lugar das raízes do CameraMan®?
04/11/2014 12/28

Controle de Sistemas – Renato Dourado Maia
Conceito de Lugar das Raízes As conclusões para um sistema simples como o
CameraMan® podem parecer triviais. Todavia, é importante perceber que o Lugar das Raízes re-presenta uma técnica importante para analisar sistemas de ordem maior do que dois...
04/11/2014 13/28

Controle de Sistemas – Renato Dourado Maia
( ) 1( ) 180 360 , 0,1, 2,
G sG sK k
Kk
=
∠ = °± ° =
Propriedades Lugar das Raízes Seja o seguinte sistema:
( )R s ( )Y sK ( )G s+
-
Função de Transferência da Malha Fechada: ( )( )
1 ( )G sT KsKG s
=+
Equação Característica: ( ) 1 ( ) ( ) 1 1 0K Ks G s G s j∆ = + → = − = − +
Forma Polar
04/11/2014 14/28

Controle de Sistemas – Renato Dourado Maia
( ) 1( ) 180 360 , 0,1, 2,
G sG s k
KK k
=∠ = °± ° =
Propriedades Lugar das Raízes Assim, para que um ponto s pertença ao Lugar
das Raízes, é necessário que:
04/11/2014 15/28

Controle de Sistemas – Renato Dourado Maia
Propriedades Lugar das Raízes Exemplo: 1( )
( 2)G s
s s=
+
2
( ) 1 ( ) 1 0( 2)
( ) 2 0
s G ss
KKs
s Ks s
∆ = + = + =+
∆ = + + =
( ) 1( 2)
( ) 180 , 540 ,
G ss s
G
K
K s
K = =+
∠ = ± ° ± °
Equação Característica:
Lugar das raízes:
04/11/2014 16/28

Controle de Sistemas – Renato Dourado Maia
Propriedades Lugar das Raízes Vamos calcular as raízes da equação caracterís-
tica para K variando de zero até infinito... 2( ) 2 0s s s K∆ = + + =Equação Característica:
0
0.5
1
2
K
K
K
K
=
=
=
=
{ }{ }{ }{ }
2,0
1.7071, 0.2929
,1 1
1 j
−
⇒ −
⇒ − −
⇒
⇒ − ±
−
2
6
15
5
10
10
10
K
K
K
K
=
=
=
=
{ }{ }{ }{ }
3
7
1
1
1
2
9.9499
10
3.16 101
j
j
j
j
−
−
−
⇒ ±
⇒ ±
⇒
± ×−
±
⇒
Para K = 0, têm-se os polos da malha aberta. Para K muito grande, os polos vão para infinito... Agora é só fazer o desenho...
04/11/2014 17/28

Controle de Sistemas – Renato Dourado Maia
Propriedades Lugar das Raízes
04/11/2014 18/28

Controle de Sistemas – Renato Dourado Maia
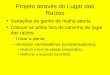
Propriedades Lugar das Raízes
-2 -1.8 -1.6 -1.4 -1.2 -1 -0.8 -0.6 -0.4 -0.2 0-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.80.20.40.580.720.830.91
0.96
0.99
0.20.40.580.720.830.91
0.96
0.99
0.250.50.7511.251.51.752
Root Locus
Real Axis
Imag
inar
y Ax
is
( ) 1 0( 2)
ss
Ks
∆ = + =+
Matlab:
>>rlocus([1],[1 2 0])
04/11/2014 19/28

Controle de Sistemas – Renato Dourado Maia
Propriedades Lugar das Raízes Para que um ponto pertença ao Lugar das Raí-
zes, qual condição deve ser satisfeita?
A condição de ângulo, sendo que a condição de módulo fornece o valor do ganho que aloca a raiz naquele ponto!
Pode-se observar que, para que a condição de ângulo seja obedecida, o LR corresponde a uma linha vertical, para ζ < 1
(subamortecimento), e uma linha horizontal, para ζ > 1 (sobreamortecimento). Vamos analisar essas conclusões nos dois
próximos slides...
04/11/2014 20/28

Controle de Sistemas – Renato Dourado Maia
Propriedades Lugar das Raízes Para um ponto qualquer, sc, sobre a reta verti-
cal, obtém-se a contribuição dos dois polos, s1 e s2, da seguinte maneira:
[ ]( 2) (180 ) 180( 2)
c
c cs s
s ss
Ks
θ θ=
∠ = −∠ −∠ + = − °− + = − °+
04/11/2014 21/28

Controle de Sistemas – Renato Dourado Maia
Propriedades Lugar das Raízes E como determinar o ganho no ponto sc?
1 2( 2) 2
c
c cc cs s
s ss s s s
K K K=
= = ⇒ = ++ +
04/11/2014 22/28

Controle de Sistemas – Renato Dourado Maia
Propriedades Lugar das Raízes Consideremos a EC escrita na forma: ( ) 1 ( )s F s∆ = +
1
1
( )( )
( )
m
iin
ll
s zF Ks
s p
=
=
+=
+
∏
∏
Sabemos que: ( ) 1 0F s j= − +
Logo: 1
1 1
1
( )1 ( ) ( ) 180 360
( )
m
i m ni
i lni l
ll
s ze s z pK s k
s p
=
= =
=
+= ∠ + − ∠ + = °± °
+
∏∑ ∑
∏
04/11/2014 23/28

Controle de Sistemas – Renato Dourado Maia
Propriedades Lugar das Raízes Exemplo:
(a) Sistema de exemplo. (b) Diagrama de polos e zeros de G(s).
O ponto (-2 + j3) pertence ao lugar das raízes? E o
ponto (-2 + j(√2/2))?
04/11/2014 24/28

Controle de Sistemas – Renato Dourado Maia
Propriedades Lugar das Raízes Exemplo:
Plano s
Representação Vetorial de G(s)
Plano s
04/11/2014 25/28

Controle de Sistemas – Renato Dourado Maia
Propriedades Lugar das Raízes Exemplo:
Representação Vetorial de G(s)
Plano s
1 1
-
( ) ( )m n
i ii j
ângulos dos zeros ângulos dos pólos
s z s p
θ
θ= =
=
= ∠ + − ∠ +
∑ ∑
∑ ∑
1 2 3 4
56.31 71.57 90 108.4370.55
θ θ θ θ θ= + − −= °+ °− °− °= −
O ponto (-2 + j3) não pertence ao lugar das raízes, isto é, não representa um polo a malha
fechada para nenhum valor de ganho.
04/11/2014 26/28

Controle de Sistemas – Renato Dourado Maia
Propriedades Lugar das Raízes Exemplo:
Representação Vetorial de G(s)
Plano s
Para o ponto (-2 + j(√2/2)), o ângulo vale 180°, e ele pertence ao lugar das raízes, isto é, representa um
pólo a malha fechada para algum valor de ganho...
1
1
3 4
1 2
( ) 1
( )
1
2 (1,22)2 0,33
(2,12)(1,22)
m
iin
ij
s zcomprimentos dos zerosM K
comprimentos dos pólos s p
comprimentos dos pólosK
M comprimentos dos zeros
L LKL L
=
=
+= = =
+
= =
= = =
∏∏∏ ∏
∏∏
04/11/2014 27/28

Controle de Sistemas – Renato Dourado Maia
Cenas do Próximo Capítulo... O LR mostra como os polos em malha fechada
variam em função de um ou mais parâmetros ajustáveis.
Traçar o LR direto pelo conceito não é algo prá-tico. Será apresentado um procedimento prático geral que permite o esboço do Gráfico do Lugar das Raízes em função da variação de um dado parâmetro.
04/11/2014 28/28