Embed Size (px)
Citation preview

Matemática Aplicada

Equações Exponenciais
Equações que envolvem termos em que a incógnita
aparece no expoente são chamadas de equações
exponenciais. Por exemplo,
Apresentaremos a seguir as propriedades:
1)
2)
3)
4)
5)
6)
7)
8)
9)
Agora vamos apresentar alguns exemplos de
equações com a respectiva solução.
Na maioria dos casos a aplicação das propriedades
de potências reduz as equações a uma igualdade de
potências da mesma base
o que, usando o fato que a função
e portanto, resolver a equação.
Exemplos
Resolver as seguintes equações exponenciais:
a)
Solução:
b)
Solução:
c)
Solução:
d)
Solução:
Iremos agora usar um artifício. Faremos uma
substituição conforme abaixo:
,
temos:
Observamos que não satisfaz porque
e)
solução:

Função Exponencial
a) Definição
Dado um número real a, a > 0 e a 1, definimos
função exponencial de base a à função f de R em
R que associa a cada x real o número real ax.
Simbolicamente:
Observações, Propriedades e Exemplos:
- A função exponencial é definida somente para
base “a” positiva, uma vez que se a é negativo
teríamos valores da imagem ax não pertencente ao
conjunto dos números reais. Por exemplo para
, a
x é igual à , que pertence ao
conjunto dos números complexos, contradizendo a
definição da função exponencial;
- A base também tem que ser diferente de 1 porque
para todo x real teríamos como imagem, sempre, o
valor 1, uma vez que 1 elevado a x é igual a 1 para
qualquer que seja o x. Em outras palavras a
imagem seria o conjunto unitário {1}, o que
também contradiz a definição. E a não pode ser
zero pois teríamos uma indeterminação para x = 0;
- A função obtida acima é denominada de função
constante, f(x) = c, x real, onde c = 1;
- Qualquer que seja a função exponencial temos
que: para x = 0 => f(0) = a0 = 1. Ou seja, o par
ordenado (0, 1) pertence à função para todo a no
conjunto dos reais positivos diferente de 1. Isto
significa que o gráfico cartesiano da função
exponencial corta o eixo y no ponto de ordenada 1;
- Uma função f é dita crescente se dados x1 < x2
pertencentes ao seu domínio, então as imagens
correspondentes obedecem a relação f(x1) < f(x2);
- Uma função f é dita decrescente se x1 < x2 então
f(x1) > f(x2);
- No caso da função exponencial ela é crescente
se, e somente se, a > 1. E decrescente se, e
somente se, 0 < a < 1. A demonstração da
propriedade não será feita aqui;
- A função exponencial é injetora, ou seja, dados
x1 diferente de x2 então f(x1) é diferente de f(x2).
Esta propriedade é decorrência direta da
propriedade acima;
- Como a base a é maior que zero, temos que ax >
0 para todo x real. Daqui segue que o conjunto
imagem da função exponencial é o conjunto dos
números reais positivos;
- Da propriedade acima concluí-se que a curva
representativa (gráfico) da função está toda acima
do eixo dos x;
- Exemplos de funções exponenciais:
b) Teoremas
Neste tópico serão apresentados os principais
teoremas sobre as funções exponenciais.
T1. Dados a e x pertencentes ao conjunto dos
reais, a > 1, então:
Não será apresentada a demonstração que depende
de outros fatos não tratados aqui.
T2. Dados a, x1 e x2 pertencentes aos conjunto dos
reais, a > 1, então:

Demonstração:
Daqui, pelo teorema T1 temos:
T3. Dados a e x pertencentes ao conjunto dos
reais, 0 < a < 1, então:
Demonstração:
Pelo teorema T1, vem que:
T4. Dados a, x1 e x2 pertencentes aos conjunto dos
reais, 0 < a < 1, então:
Equação Logarítmicas
Definição:
Sendo a e b números reais positivos, com b 1,
chamamos de logaritmo de a na base b o expoente
real x no qual se eleva b para obter a
com,
a > 0 e e b > 0
Exemplos:
a) log2 8 = 3, pois 23 = 8
b) log10 100 = 2, pois 102 = 100
c) log5 25 = 2, pois 52 = 25
d) log1/3 9 = -2, pois (1/3)-2
= 9
As equações envolvendo logaritmos são chamadas
de equações logarítmicas e são resolvidas
aplicando-se propriedades dos logaritmos, assim
vamos a elas:
1)
2)
3)
4)
5)
6)
7)
8)
* 9)
* A propriedade acima é uma mudança de base
Além disto, devemos inicialmente analisar as
condições de existência dos logaritmos, levando-se
em conta os domínios de definição do logaritmo e
da base:
Exemplos
Resolva as seguintes equações:
a)
Solução
Vamos primeiramente analisar as condições de
existência:
Temos:

Pela condição de existência,
b)
Solução:
Condição de existência:
Temos
Pela condição de existência,
Certas equações exponenciais não podem ser
resolvidas usando-se apenas as propriedades da
potenciação.
Ao resolver a equação 2x = 10, por exemplo,
podemos afirmar que 2x representa um número real
compreendido entre 23 e 24.
Assim concluímos que x é um número irracional e
para determiná-lo com maior aproximação,
precisamos conceito, o de logaritmo.
Com ele podemos resolver problemas de potências
com qualquer expoente real, como o exemplo acima.
Aplicando-se a propriedade temos:
Obs.: Quando a base é 10, por convenção,
omitimos a base, ou seja, log10 x = log x
Funções Logarítmicas
Gráfico de uma função logarítmica
Para a construção do gráfico da função logarítmica
devemos estar atentos a duas situações: a > 1 e 0 <
a < 1
Para a > 1, temos o gráfico da seguinte forma:
Função Crescente
Para 0 < a < 1, temos o gráfico da seguinte forma:
Função Decrescente
1- Calcule o valor de x:
a)
b)
c)

d)
e)
2- Dados ,
3- Resolva a equação:
4- Resolva a equação:
5- Resolva a equação:
6- Dados log 2 = 0,3010 e log 3 = 0,4771, calcule
log 144
7- Dado log 2 = 0,3010, calcule
8- Passe log 48 para a base 2
9- Dados log 2 = 0,3010 e log 3 = 0,4771, calcule
log2 3
10- Construa os gráficos da função e
(atribuir os seguintes valores para x: ¼,
½, 1, 2, 4).
Matrizes
Definição
As matrizes são tabelas de números reais utilizadas
em quase todos os ramos da ciência e da
engenharia. Várias operações realizadas por
computadores são através de matrizes. Vejamos
um exemplo. Considere a tabela abaixo que
apresenta o peso, a idade e a altura de 5 pessoas.
O conjunto ordenado dos números que formam a
tabela é denominado matriz e cada
número é chamado elemento da matriz.
Neste exemplo temos uma matriz de ordem 5 x 3
(lê-se: cinco por três), isto é, uma
matriz formada por 5 linhas e 3 colunas.
Representa-se uma matriz colocando-se seus
elementos entre parênteses ou entre colchetes.
Exemplos:
: matriz de ordem 2 x 3 (2 linhas e 3
colunas)
: matriz de ordem 1 x 3 (1 linha e 3
colunas)
: matriz de ordem 2 x 1 (2 linhas e 1 coluna)
Representação Algébrica
Utilizamos letras maiúsculas para indicar matrizes
genéricas e letras minúsculas correspondentes para
os elementos. Algebricamente, uma matriz pode
ser representada por:

Pode-se abreviadamente representar a matriz
acima por A = (aij)n x m
aij = i – linha
j – coluna
a42 = 18 (lê-se: a quatro dois é igual a dezoito)
(na tabela significa a idade de Pedro 18)
Exemplo: Achar os elementos da matriz A = (aij)3
x 2 em que aij = 3i – j.
Resolução: A representação genérica da matriz é:
Matriz Quadrada
Se o número de linhas de uma matriz for igual ao
número de colunas, a matriz é dita
quadrada.
Exemplo:
Observações:
1ª) Quando todos os elementos de uma matriz
forem iguais a zero, dizemos que é uma matriz
nula.
2ª) Os elementos de uma matriz quadrada, em que
i = j, formam uma diagonal denominada diagonal
principal. A outra diagonal é chamada diagonal
secundária.
Resolva:
1) Ache os elementos da matriz A = (aij) de ordem
3, em que
2) Escreva os elementos da matriz A = (aij) de
ordem 3, definida por
3) Escreva os elementos da matriz A = (aij)4x2,
definida por
Matriz unidade ou matriz identidade
A matriz quadrada de ordem n, em que todos os
elementos da diagonal principal são
iguais a 1 e os demais elementos são iguais a 0, é
denominada matriz unidade ou matriz
identidade. Representa-se a matriz unidade por In.
Exemplo:
Matriz transposta
Se A é uma matriz de ordem m x n, denominamos
transposta de A a matriz de ordem n x m obtida
pela troca ordenada das linhas pelas colunas.
Representa-se a matriz transposta de A por At.

Exemplo:
Igualdade de Matrizes
Sejam as matrizes A e B de mesma ordem. Se cada
elemento de A for igual ao elemento
correspondente de B, as matrizes A e B são ditas
iguais.
Exemplo:
Dadas as matrizes
,
calcular x e y para que A = B.
Resolva:
1) Determine x e y, sabendo que
Resp: x = 5 e y = -1
2) Determine a, b, x e y, sabendo que
Resp: x = 1 , y = 2 , a = 2 e b = -5
3) Dada as matrizes
calcule x, y e z para que B = At.
Resp: x = , y = 8 e z = 2
4) Sejam
calcule a, b e c para que A = B.
Resp: a = - 3 , b = c = - 4
Operações com matrizes
Adição e Subtração: a adição e subtração de duas
matrizes do mesmo tipo é efetuada somando-se ou
subtraindo-se os seus elementos correspondentes.
Exemplo:
C = A + B
Matriz oposta: denomina-se matriz oposta de uma
matriz A a matriz – A cujos elementos são os
simétricos dos elementos correspondentes de A
Exemplo:

Propriedades da Adição:
Comutativa: A + B = B + A
Associativa: A + (B + C) = (A + B) + C
Elemento Neutro: A + 0 = A
Elemento Oposto: A + (-A) = 0
Exemplo: Dadas as matrizes
,
calcule:
Exemplo: Dadas as matrizes
calcular a matriz X tal que X – A + B = 0
O segundo membro da equação é uma matriz nula
de ordem 3 x 1.
Resolva:
1) Dada a matriz
obtenha a matriz X tal que X = A+ At
2) Sendo A = (aij)1x3 tal que
e
calcule A+B.
3) Ache m, n, p e q, de modo que:
4) Calcule a matriz X, sabendo que
Multiplicação de um número real por uma
matriz:
Para multiplicar um número real por uma matriz
multiplicamos o número por todos os elementos da
matriz, e o resultado é uma matriz do mesmo tipo.
Exemplo:

Resolva:
1) Para
Resolva X + 2A - B = 0
2) Para
Resolva
3) Resolva o sistema
Multiplicação de Matrizes
Não é uma operação tão simples como as
anteriores; não basta multiplicar os elementos
correspondentes. Vejamos a seguinte situação.
Durante a 1ª fase da Copa do Mundo de 1998
(França), o grupo do Brasil era formado também
pela escócia, Marrocos e Noruega. Os resultados
estão registrados abaixo em uma matriz A, de
ordem 4 x 3.
Então:
A pontuação pode ser descrita pela matriz B, de
ordem 3 x 1
Então:
Terminada a 1ª fase a pontuação é obtida com o
total de pontos feitos por cada país.
Essa pontuação pode ser registrada numa matriz
que é representada por AB (produto de A por
B).Veja como é obtida a classificação:
Esse exemplo sugere como deve ser feita a
multiplicação de matrizes. Observe a relação que
existe entre as ordens das matrizes:

Observe que definimos o produto AB de duas
matrizes quando o número de colunas de A for
igual ao de linhas de B; além disso, notamos que o
produto AB possui o número de linhas de A e o
número de colunas de B.
A matriz existe se n = p (o número de coluna de A
é igual o número de linha da B.)
Calcule:
Observação:
1ª Propriedade Comutativa A.B = B.A, não é
valida na multiplicação de matrizes.
Observação:
2ª Propriedade: Se A e B são matrizes tais que
AB = 0 (matriz nula), não podemos garantir que
uma delas (A ou B) seja nula.
Observação: A.B = A.C, B C. – na álgebra
a.b = a.c b = c
Observação:
3ª Propriedade: o cancelamento do produto de
matrizes não é válido
Propriedades:
- Distributiva: A.(B + C) = A.B + A.C
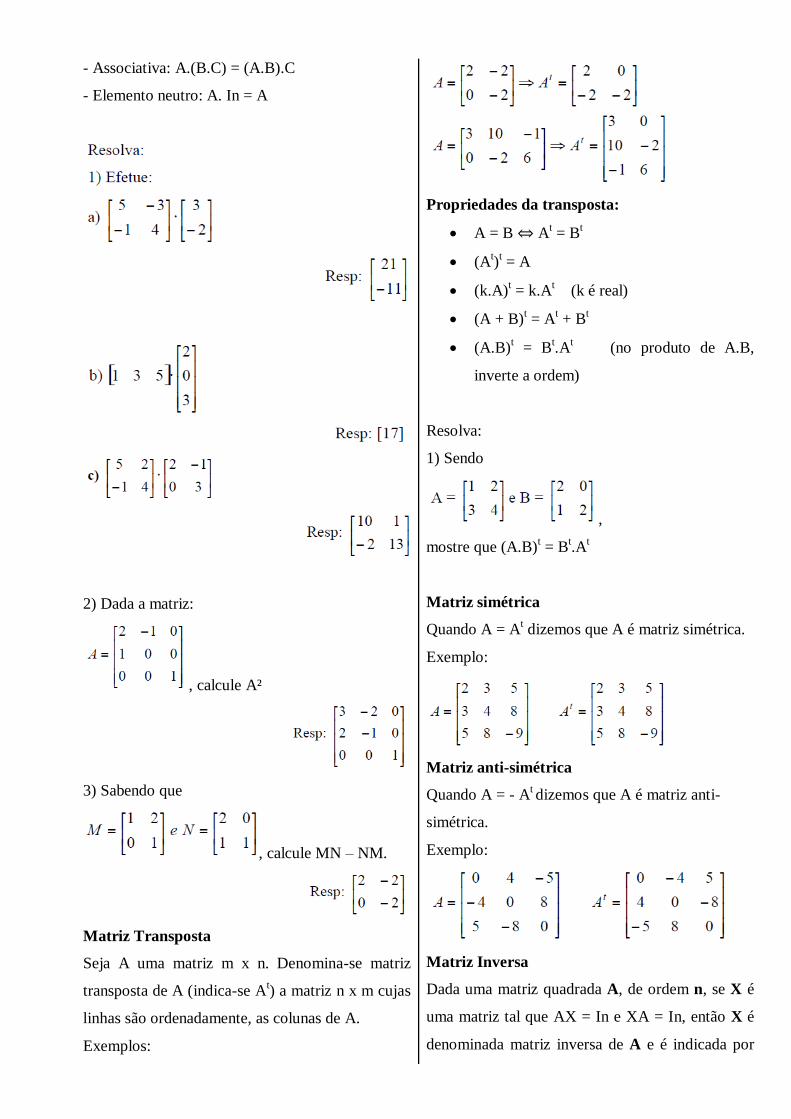
- Associativa: A.(B.C) = (A.B).C
- Elemento neutro: A. In = A
2) Dada a matriz:
, calcule A²
3) Sabendo que
, calcule MN – NM.
Matriz Transposta
Seja A uma matriz m x n. Denomina-se matriz
transposta de A (indica-se At) a matriz n x m cujas
linhas são ordenadamente, as colunas de A.
Exemplos:
Propriedades da transposta:
A = B At = B
t
(At)
t = A
(k.A)t = k.A
t (k é real)
(A + B)t = A
t + B
t
(A.B)t = B
t.A
t (no produto de A.B,
inverte a ordem)
Resolva:
1) Sendo
,
mostre que (A.B)t = B
t.A
t
Matriz simétrica
Quando A = At dizemos que A é matriz simétrica.
Exemplo:
Matriz anti-simétrica
Quando A = - At dizemos que A é matriz anti-
simétrica.
Exemplo:
Matriz Inversa
Dada uma matriz quadrada A, de ordem n, se X é
uma matriz tal que AX = In e XA = In, então X é
denominada matriz inversa de A e é indicada por

A-1. Quando existe a matriz inversa de A, dizemos
que A é uma matriz inversível ou não singular.
Exemplo: Verifique se existe e, em caso
afirmativo, determine a matriz inversa de
Resolução: Pela definição temos,
Pela igualdade de matrizes, temos os sistemas,
A seguir verificamos se XA = I2
1) Determine a inversa das matrizes:
Equações matriciais do tipo AX = B ou XA = B,
para A inversível.
Seja A uma matriz tal que exista A-1. Sabendo que
AX = B, vamos demonstrar que X = A-1
B.
O mesmo também é válido XA = B X = BA-1
1) Sabendo que:
a) verifique-se
b) determine X tal que AX = B
Não deixe de resolver a lista de exercícios de
matrizes!!!
Exercícios de Matrizes
1) Construa a matriz real quadrada A de ordem 3,
definida por:

2) Sendo
calcule:
a) N – P + M
b) 2M – 3N – P
c) N – 2(M – P)
3) Calcule a matriz X, sabendo que:
4) Dadas as matrizes
determine a e b, de modo que AB = I, em que I é a
matriz identidade.
5) Dadas as matrizes
Calcule:
a) A²
b) A³
c) A²B
d) A² + 3B
6) Dadas as matrizes
calcule AB + Bt
7) Resolva a equação:
8) Sendo
determine os valores de a e b, tais que B = P.A.P-1
9) Determine os valores de x, y e z na igualdade
abaixo, envolvendo matrizes reais 2 x 2:

10) Dadas as matrizes
então a matriz -2AB é igual a:
11) A inversa da matriz é:
12) Se então:
a) x = 5 e y = -7
b) x = -7 e y = -5
c) x = -5 e y = -7
d) x = -7 e y = 5
e) x = 7 e y = -5
13) Sendo então
a matriz X, tal que é igual a:
14) Se A e B são matrizes
tais que
então a matriz Y = At.B será
nula para:
a) x = 0
b) x = -1
c) x = -2
d) x = -3
e) x = -4
15) A solução da
equação matricial
é a matriz:
Determinantes
2.1 Definição
Determinante é um número real que se associa a
uma matriz quadrada.
2.2 Determinante de uma matriz quadrada de
2ª ordem
Dada a matriz de 2ª ordem

chama-se determinante associado a matriz A (ou
determinante de 2ª ordem) o número real obtido
pela diferença entre o produto dos elementos da
diagonal principal e o produto dos elementos da
diagonal secundária.
Então, determinante de A = a11 . a22 – a12 . a21
Indica-se
Observação: Dada a matriz A de ordem 1, define-
se como determinante de A o seu próprio
elemento, isto é:
det A = 2 . 1 – 3 . 4 = 2 – 12
det A = –10
Resolva:
1) Resolva a equação:
2) Resolva a equação:
3) Sendo calcule
det (AB).
2.3 Menor Complementar
O menor complementar Dij do elemento aij da
matriz quadrada A, é o determinante que se obtém
de A, eliminando–se dela a linha “i” e a coluna “j”,
ou seja, eliminando a linha e a coluna que contém
o elemento aij considerado.
Exemplo:
Dada a matriz calcular D11,
D12, D13, D21 e D32.
2.4 Cofator
Consideremos a matriz quadrada de 3ª ordem
Chama-se Cofator do elemento aij da matriz
quadrada o número real que se obtém
multiplicando-se (-1)i+j
pelo menor complementar
de aij e que é representado por Aij = (-1)i+j
.Dij
Exemplo: Dada a matriz
calcular:
a) A11 b) A13 c) A32

Resolva: Dada a matriz
determine A13 , A21 , A32 e A33.
2.5 Definição de Laplace
O determinante associado a uma matriz quadrada
A de ordem n 2é o número que se obtém pela
soma dos produtos dos elementos de uma linha (ou
de uma coluna) qualquer pelos respectivos
cofatores. Exemplo:
Sendo uma matriz de
ordem 3, podemos calcular o det A a partir de
determinantes de ordem 2 e da definição de
Laplace. Escolhendo os elementos da primeira
linha temos:
Observação: Para se aplicar esse método é melhor
escolher a linha ou coluna que tiver o maior
número de zeros.
Resolva: Calcule o determinante da matriz A
utilizando a definição de Laplace:
2.6 Regra de Sarrus (regra prática para
calcular determinantes de ordem 3)
Seja a matriz repetimos as duas
primeiras colunas à direita e efetuamos as seis
multiplicações em diagonal. Os produtos obtidos
na direção da diagonal principal permanecem com
o mesmo sinal. Os produtos obtidos da diagonal
secundária mudam de sinal. O determinante é a
soma dos valores obtidos.
Resolva:
a) Calcule o determinante da matriz

b) Resolva a equação
c) Dada as matrizes
determine x para que det A = det B
d) Resolva a equação
e) Seja M = (mij) a matriz quadrada de ordem 3,
em que:
Ache o valor do determinante de M.
f) Calcule o determinante da matriz P2 , em que P
é a matriz
2.7 Determinante de uma matriz quadrada de
ordem n > 3
Seja a matriz quadrada de ordem 4
vamos calcular o
determinante de A. Para tanto, aplicaremos o
teorema de Laplace, até chegarmos a um
determinante de 3ª ordem, e depois empregaremos
a regra de Sarrus. Assim, desenvolvendo o
determinante acima, segundo os elementos da 1ª
linha, temos:
Substituindo em (1) temos:
det A = 34 – 132 + 111 = 13
Resolva: Calcule o determinante a seguir,
desenvolvendo-o segundo os elementos da 1ª
linha.

2.8 Propriedade dos Determinantes
1ª propriedade: Se todos os elementos de uma
linha ou coluna de uma matriz quadrada A forem
iguais a zero, seu determinante será nulo, isto é,
det A = 0.
Exemplo:
2ª propriedade: Se os elementos correspondentes
de duas linhas (ou de duas colunas) de uma matriz
quadrada A forem iguais, seu determinante será
nulo, isto é, det A = 0
Exemplo:
3ª propriedade: Se uma matriz quadrada A possui
duas linhas (ou colunas) proporcionais, seu
determinante será nulo, isto é , det A = 0
Exemplo:
4ª propriedade: Se todos os elementos de uma
linha (ou de uma coluna) de uma matriz quadrada
são multiplicados por um mesmo número real k,
então seu determinante fica multiplicado por k.
Exemplo:
5ª propriedade: Se uma matriz quadrada A de
ordem n é multiplicada por um número real k, o
seu determinante fica multiplicado por kn, isto é:
det (kAn) = kn . det An.
Exemplo:
6ª propriedade: O determinante de uma matriz
quadrada A é igual ao determinante de sua
transposta, isto é, det A = det At.
Exemplo:
7ª propriedade: Se trocarmos de posição entre si
duas linhas (ou colunas) de uma matriz quadrada
A, o determinante da nova matriz obtida é o oposto
do determinante da matriz anterior.
Exemplo:

8ª propriedade: O determinante de uma matriz
triangular é igual ao produto dos elementos da
diagonal principal.
Exemplo:
9ª propriedade: Sendo A e B duas matrizes
quadradas de mesma ordem e AB a matriz
produto, então det AB = det A . det B (teorema de
Binet)
Exemplo:
10ª propriedade: Seja A uma matriz quadrada. Se
multiplicarmos todos os elementos de uma linha
(ou coluna) pelo mesmo número e somarmos os
resultados aos elementos correspondentes de outra
linha (ou coluna), formando uma matriz B, então
det A = det B (Teorema de Jacobi).
Exemplo:
Multiplicando a 1ª linha por -2 e somando os
resultados à 2ª linha obtemos:
Exercícios de Determinantes
1) Dadas as matrizes
calcule:
a) det (A²)
b) det (B²)
c) det (A² + B²)
2) Determine a solução da equação
3) Sendo dê o
valor de:
a) det (A). det(B)
b) det (A.B)
4) Considere as matrizes
Sabendo que a matriz B é igual a matriz C, calcule
o determinante da matriz A.

5) Calcule o determinante da matriz M = (AB). C,
sendo
6) A solução da equação
a) 1 b) 58 c) -58 d)
e) 2
7) A equação
tem como conjunto verdade:
a) {-6, 2} b) {-2, 6} c) {2, 6}
d) {-6, 6} e) {-2, 2}
8) O determinante da matriz
vale:
a) -3 b) 6 c) 0 d) 1 e) -1
9) A solução da equação
vale:
a) {-11, 5} b) {-6, 3} c) {0, 3}
d) {0, 6} e) {5, 11}
Sistema de Equações
Os sistemas de equações consistem em ferramentas
importantes na Matemática, eles são utilizados
para determinar os valores de x e y nas equações
com duas variáveis. A resolução dos sistemas
consiste em estabelecer uma relação entre as
equações e aplicar técnicas de resolução. Os
métodos usados na resolução de um sistema são:
substituição e adição. Exemplos de sistemas de
equações:
Método da Substituição
O método da substituição consiste em trabalhar
qualquer equação do sistema de forma a isolar uma
das incógnitas, substituindo o valor isolado na
outra equação. Observe passo a passo a resolução
do sistema a seguir:
Nesse caso, vamos escolher a 2º equação e isolar a
incógnita x.
x – y = –3
x = –3 + y

Agora, substituímos o valor de x por –3 + y na 1º
equação.
2x + 3y = 19
2(–3 + y) + 3y = 19
–6 + 2y + 3y = 19
2y + 3y = 19 + 6
5y = 25
y = 5
Para finalizar, calculamos o valor de x utilizando a
seguinte equação:
x = –3 + y
x = –3 + 5
x = 2
Portanto, a solução do sistema é x = 2 e y = 5, isto
é, o par ordenado (2,5)
Método da Adição
O método da adição deve ser utilizado nos
sistemas em que existe a oportunidade de zerar
uma das incógnitas. Observe a resolução do
sistema a seguir:
1º passo: somamos as equações, eliminando uma
das incógnitas e determinando o valor da outra
incógnita.
___________
Calculado o valor de x, basta escolher uma das
equações e substituir o valor de x por 11.
x + y = 10
y = 10 – x
y = 10 – 11
y = –1
A solução do sistema é o par ordenado (11, –1).
Classificação de um sistema quanto ao número
de soluções
Resolvendo o sistema:
Encontramos uma única solução: o par ordenado
(3,5). Assim, dizemos que o sistema é possível
(tem solução) e determinado (solução única).
No caso do sistema:
Verificamos que os pares ordenados (0, 8), (1, 7),
(2, 6), (3, 5), (4, 4), (5, 3),... são algumas de suas
infinitas soluções. Por isso, dizemos que o sistema
é possível (tem solução) e indeterminado (infinitas
soluções).
No sistema:
Verificamos que nenhum par ordenado satisfaz
simultaneamente as equações. Portanto, o sistema
é impossível (não tem solução).
Resumindo, um sistema linear pode ser:
a) Sistema Possível e Determinado (solução
única);

b) Sistema Possível e Indeterminado (infinitas
soluções);
c) Sistema Impossível (não tem solução).
Sistema normal
Um sistema é normal quando tem o mesmo úmero
de equações (m) e de incógnitas (n) e o
determinante da matriz incompleta associada ao
sistema é diferente de zero.
Se m = n e det A 0, então o sistema é normal.
Regra de Cramer
Todo sistema normal tem uma única solução dada
por:
em que i {1,2,3,...,n}, D = det A é o
determinante da matriz incompleta associada ao
sistema, e Dxi é o determinante obtido pela
substituição, na matriz incompleta, da coluna i pela
coluna formada pelos termos independentes.
Discussão de um sistema linear
Se um sistema linear tem n equações e n
incógnitas, ele pode ser:
a) Sistema Possível e Determinado (solução
única), se D = det A 0; caso em que a solução é
única.
Exemplo:
m = n = 3
Então, o sistema é possível e determinado, tendo
solução única.
b) Sistema Possível e Indeterminado (infinitas
soluções), se D = Dx1 = Dx2 = Dx3 = ... = Dxn= 0,
para n = 2. Se n 3, essa condição só será válida
se não houver equações com coeficientes das
incógnitas respectivamente proporcionais e termos
independentes não-proporcionais.
Um sistema possível e indeterminado apresenta
infinitas soluções.
Exemplo:
D = 0, Dx = 0, Dy = 0 e Dz = 0
Assim, o sistema é possível e indeterminado, tendo
infinitas soluções.
c) Sistema Impossível (não tem solução), se D = 0
e Dxi 0, 1 i n; caso em que o sistema não
tem solução.
Exemplo:
Como D = 0 e Dx 0, o sistema é impossível e
não apresenta solução.
Sistemas Equivalentes
Dois sistemas são equivalentes quando possuem o
mesmo conjunto solução.
Por exemplo, dados os sistemas:

verificamos que o par ordenado (x, y) = (1, 2)
satisfaz ambos e é único. Logo, S1 e S2 são
equivalentes:
S1 ~ S2.
Propriedades
a) Trocando de posição as equações de um
sistema, obtemos outro sistema equivalente.
Por exemplo:
e
S1 ~S2
b) Multiplicando uma ou mais equações de um
sistema por um número K (K IR*), obtemos um
sistema equivalente ao anterior. Por exemplo:
Multiplicando a equação (II) por 3
S1 ~S2
c) Adicionando a uma das equações de um sistema
o produto de outra equação desse mesmo sistema
por um número k ( K ЄIR*), obtemos um sistema
equivalente ao anterior.
Por exemplo:
Dado:
Substituindo a equação (II) pela soma do produto
de (I) por -1 com (II), obtemos:
S1~S2, pois (x, y) = (2, 1) é solução de ambos os
sistemas.
Exercícios de revisão
1) Encontre o valor das variáveis:
a)
b)
2) a Lei das Correntes visa o equacionamento das
correntes nos diversos nos de um circuito, e por
isso e também conhecida por “Lei de Nos”.
“A soma algébrica das correntes que entram em
um nó e igual a soma das correntes que dele
saem.”
Calcule a corrente I2 na figura abaixo:
3) Um eletricista e verificou que numa residência
haviam correntes elétricas definidas por I1 , I2 e I3.
Calcule I1 , I2 e I3, sabendo-se que a soma total das
corretes são definidas pelas equações:
10I1 + 30I2 + 20I3 = 150
20I1 + 50I2 + 30I3 = 240
30I1 + 20I2 + 40I3 = 230

4) Resolver o seguinte sistema de equações
lineares adotando operações aritméticas com 4
(quatro) dígitos significativos e arredondamento
ponderado.
5) Resolver o seguinte sistema de equações
lineares
6) Resolver o seguinte sistema de equações
lineares
Trigonometria e relações trigonométricas
Quando da sua criação pelos matemáticos gregos,
a trigonometria dizia respeito exclusivamente à
medição de triângulos, e tal como as funções e
relações trigonométricas apresentadas a seguir, é
aplicada exclusivamente ao estudo de triângulos
retângulos. Porém, as funções trigonométricas
resultantes, e apresentadas mais adiante,
encontram aplicações mais vastas e de maior
riqueza noutras áreas como a Física (por exemplo,
no estudo de fenômenos periódicos) ou a
Engenharia.
Em trigonometria, os lados dos triângulos
retângulos assumem nomes particulares,
apresentados na figura ao lado. O lado mais
comprido, oposto ao ângulo reto θ, chama-se
hipotenusa; os lados restantes, ligados ao ângulo
reto, chamam-se catetos.
Teorema de Pitágoras
O geómetra grego Pitágoras (570–501 a.C.)
formulou o seguinte teorema, que tem hoje o seu
nome, e que relaciona a medida dos diferentes
lados de um triângulo retângulo: a soma do
quadrado dos catetos é igual ao quadrado da
hipotenusa. Ou seja, se x e y forem o comprimento
dos dois catetos e h o comprimento da hipotenusa,
ter-se-á:
x² + y² = h² .
Relações trigonométricas de ângulos
Na esmagadora maioria das aplicações
trigonométricas relacionam-se os comprimentos
dos lados de um triângulo recorrendo a
determinadas relações dependentes de ângulos
internos. Assim, apresentam-se de seguida
algumas relações trigonométricas com esse fim.
Utilizaremos o triângulo retângulo anteriormente
apresentado.
Seno de
É o quociente do comprimento do cateto oposto ao
ângulo pelo comprimento da hipotenusa do
triângulo, ou seja,
h
y
hipotenusa
oposto cateto)sen( .

O seno de pode aparecer com uma das seguintes
representações: sen, sin, sen(), sin().
Coseno de
É o quociente do comprimento do cateto adjacente
ao ângulo pelo comprimento da hipotenusa do
triângulo, ou seja,
h
x
hipotenusa
adjacente cateto)cos( .
Em geral, o coseno de aparece com uma das
duas representações: cos, cos().
Tangente de
É o quociente dos comprimentos do cateto oposto
pelo cateto adjacente, ou seja,
x
y
x
h
h
y
hx
hy
/
/
adjacente cateto
oposto cateto)tan( .
É usual representar a tangente de a de uma das
seguintes maneiras: tan, tan(), tg, tg().
Co-tangente de
É definida como o recíproco da tangente de :
oposto cateto
adjacente cateto
)tan(
1)cotan(
y
x
.
A co-tangente de a pode aparecer representada de
uma das maneiras seguintes: cotan(), cotg(),
cotan, cotg.
Pelas definições em c) e d), e segundo as
definições em a) e b), podemos ver ainda que:
)cos(
)sen()tan(
e
)sen(
)cos()cotg(
.
a) Secante e co-secante de
Definem-se ainda as funções secante de e
co-secante de como, respectivamente:
x
h
)cos(
1)sec(
e
y
h
)sen(
1)cosec(
.
A secante pode ser representada por: sec(),
sec. A co-secante pode ser representada por:
cosec(), cosec, csc(), csc.
Observação:
Das definições acima, temos:
Fórmula fundamental da trigonometria
A fórmula fundamental da trigonometria surge
como um caso particular do teorema de Pitágoras.
12
2
2
2222
h
y
h
xhyx .
Pela definição de seno e de coseno de um ângulo,
dadas acima por a) e b), temos que:
1)(cos)(sen 22 .
Relações trigonométricas derivadas
Dividindo a relação fundamental por cos² , temos
sen² + cos² = 1 cos²
ou
Dividindo a relação fundamental por sen² ,
temos:

sen² + cos² = 1 sen²
Ângulos Notáveis
Os ângulos de 30°, 45° e 60° são utilizados com
muita freqüência e por isso convém memorizá-los.
Para isto temos uma tabela que resume esses
valores:
30° 45° 60°
sen
cos
tg
1
Exemplo
1) Qual é a altura h da torre, conhecendo-se apenas
a distância entre os pontos A e B, e os ângulos e
β?
Dados: = 20° e = 18°
Gráficos de Funções trigonométricas
Análises mais detalhadas
1. SENO: O seno de um ângulo nada mais é do
que a medida da coordenada vertical de um ponto
no eixo Y. Digamos que este ponto seja P(x,y). A
medida vertical do segmento 0Y lhe dá o seno do
ângulo em que o segmento 0P faz com o eixo X.
Exemplo: 1. Qual é o seno de 27°?
Solução: Com um papel milimetrado e um
transferidor, tome uma vertical e uma horizontal
qualquer como referências de alinhamento para o
transferidor. Marque com um ponto P o ângulo de
27°.
Tome cuidado porque sua referência é o eixo X à
direita da origem zero.
Trace de leve e a lápis, um segmento 0P, ou seja,
desde o ponto P até a origem dos eixos de
referência. Observe que o segmento 0P é a
diagonal ou hipotenusa de um triângulo-retângulo.
Agora, trace um pontilhado de leve, a lápis e
vertical, desde P até este tocar a horizontal adotada
em um ponto que chamaremos de M. Este
pontilhado é o segmento MP. Faça o mesmo, só
que horizontal, desde P até a vertical adotada. Este
encontro, chamaremos de ponto Q e o segmento
horizontal formado será QP.
Pois bem, a medida do segmento QO dividida pela
medida da diagonal OP, nos dará o seno de 27°.
Para medir estes segmentos, use régua ou baseie-se
nos centímetros e milímetros do papel
milimetrado.
Proceda da maneira explicada para calcular os
senos de demais ângulos à sua escolha. Como
exercícios, sugere-se 19°, 31°, 53°, 74° e 87°.

1-a. A FUNÇÃO sen x:
Da mesma forma que a análise das demais funções
matemáticas, vamos analisar a função f(x) = sen x.
O Domínio desta função, ou seja, os elementos
contidos no eixo X, são números reais baseados
em arcos de ângulos. Para o ângulo de 90°,
utilizaremos , para 180°, e assim por diante.
A tabela abaixo nos indica os arcos de ângulos
mais conhecidos para usarmos no eixo X:
Estes arcos lêem-se "pi-radianos" e são obtidos
multiplicando-se 180° (o próprio rad) por uma
fração tal que o resultado coincida com um ângulo
exato conhecido. Como exercício, tabele de 15 em
15 graus, desde o 150° ao 360°. Dica: = 180°.
Pois bem, no eixo Y irá a imagem da função, ou
seja, o resultado do seno para cada ângulo. Com o
auxílio de uma calculadora ou calculando a
"muque", com triângulos-retângulos e papel
milimetrado, temos que:
O que se observa?
1. O ângulo de 90° é 1: Isto por que 1 é o raio de
uma circunferência adotada por padrão. Se o raio
de uma circunferência que você fizer no papel
milimetrado possuir 12cm, então 12cm = 1 por
padrão.
2. Para ângulos acima de 90°, o ângulo volta a
diminuir: Isto por que o valor do seno de um
ângulo qualquer NUNCA ultrapassa 1! Podemos
afirmar com segurança, portanto, que a IMAGEM
no eixo Y está entre -1 e 1. Você irá reparar que
para qualquer ângulo, há um seno positivo ou
negativo, dentro do intervalo entre -1 e 1. Logo: -1
1 sen x +1. Então, se você tabelar senos para
ângulos de 0° a 360° , não importando o intervalo
adotado, o gráfico será uma onda:
Em se tratando de características de sinal da
imagem, esta função é PAR, ou seja, ela se
mantém positiva para ângulos entre 0° e 180° e
negativa para ângulos entre 180° e 360°.
2. COSSENO: O cosseno de um ângulo nada mais
é do que a medida da coordenada horizontal de um
ponto no eixo X. Digamos que este ponto seja
P(x,y). A medida horizontal do segmento 0X lhe
dá o cosseno do ângulo em que o segmento 0P faz
com o eixo X.
2-a. A FUNÇÃO cos x: Pois bem: Vamos retomar
ao esquema geométrico da figura milimetrada.
Reaproveitando o triângulo-retângulo de
segmentos, se dividirmos o valor da medida do
segmento OM (horizontal) pela medida do

segmento OP (a diagonal ou hipotenusa), iremos
obter o cosseno do ângulo exemplo adotado (27°).
Dos ângulos sugeridos como exercícios
anteriormente, calcule o cosseno de cada um.
Da mesma forma que o seno, a imagem da função
cosseno nunca excede 1 e baixa de -1, o que faz
com que sua imagem seja assim: -1 cos x +1,
todavia, como o cosseno de 90° é 1, diz-se que por
diferença de defasagem, o gráfico desta função
"atrasa" noventa graus, além de ser ÍMPAR em
termos de sinal da imagem, pois ela se alterna, ou
seja, cosseno é positiva para valores entre 0° e 90°,
negativa para valores entre 90o e 180o, positiva
para valores entre 180° e 270° e negativa para
valores entre 270° e 360°.
Como exercício, complete a tabela acima, para
ângulos de 150° a 360° e repare o comportamento
do sinal.
3.TANGENTE: Para visualizarmos geométrica-
mente a tangente de um ângulo qualquer, temos
que levar em conta que a medida OP diagonal é
referência à medida do raio R de uma
circunferência (OP = Raio). Façamo-la, com a
origem dos eixos XY no seu centro, como uma
mira de tiro-ao-pato. Uma reta vertical toca sua
extremidade direita, cortando o eixo X (veja a
figura abaixo).
A tangente é a medida do segmento GC. Em
termos de papel milimetrado, sua obtenção só será
possível se desenharmos uma semi-circunferência
de 90 , ocupando um o dos quatro cantos deste
papel.
Ao contrário das funções seno e cosseno, a
tangente vai além dos valores entre 1 e -1, de tal
forma que a imagem desta têm como característica
tg Para se ter uma idéia disto, saiba
por exemplo que a tangente de 89,9° = 573. E a
tangente de 90°, por ser perfeitamente paralela ao
eixo tangente, nunca encontra-o e portanto, não
existe.

3-a. A FUNÇÃO tg x: Esta função têm como
característica números enormes quando os ângulos
tendem a se aproximar demais de 90°. Acima
deste, a projeção começa a diminuir até que em
180° ela se torne zero e de 180° a 360°, negativa.
A função tangente, portanto, é PAR.
Como exercício, obtenha os valores para tangente
de 150° a 360°.
Exercícios de Revisão
1. Usando papel milimetrado e a técnica do
triângulo-retângulo, obtenha seno, cosseno e
tangente dos ângulos, comparando os resultados
com os da calculadora:
a) 12° b) 29° c) 36°
d) 41° e) 67° f) 84°
2. Descreva os domínios e imagens das funções
seno, cosseno e tangente. Comente, dando seu
parecer de entendimento.
3. Converta para radianos os ângulos do exercício
1.
4. Um círculo têm raio de 14cm. Uma formiga que
percorreu
deste círculo, quanto ela percorreu,
em metros?
5. Resolva x:
6. Eleve o valor do seno de qualquer ângulo ao
quadrado e some com o valor do quadrado do
cosseno deste mesmo ângulo. O quê você nota?
Será que funciona para qualquer outro ângulo?
Justifique sua resposta.
7. O sol do meio-dia de um dia de verão projeta a
sombra de uma haste de 60cm no chão. Se esta
haste faz 40 com a horizontal, qual o é o
comprimento real da sombra?
8. Uma pessoa de 1,80 projeta, em uma certa hora,
uma sombra de 1m no chão. Um prédio, nesta
mesma hora, projeta outra sombra, de 9,2m. Qual é
a altura do prédio?
9. (Colégio Militar) Você vê uma montanha ao
longe e ela ocupa 25° no seu campo de horizonte
de visada. Se você se aproxima desta montanha a
tal ponto dela ocupar 45°, depois de caminhar
12km, calcule a altura desta montanha.
10. Em uma circunferência de raio 15cm, centrada
em (0,0), um ponto sobre a periferia desta
circunferência, assinalando o ângulo de 137°, têm
coordenadas P(X,Y). Calcule X e Y.

11) Calcule o seno, o cosseno , a tangente, a
cotangente, a secante e a cossecante de na figura
seguinte:
12) Uma pessoa sobe uma rampa de 10m de
comprimento e se eleva verticalmente 5m. Qual o
ângulo que a rampa forma com o plano horizontal?
13) Um observador enxerga uma montanha
segundo um ângulo .
Caminhando 420m em direção à montanha, passa a
enxergá-la segundo um ângulo . Calcule a altura
da montanha, sabendo que
Dados:
14) Simplificando a fração
, obteremos:
15) Calcule o seno, cosseno e a tangente de e de
na figura a seguir:
16) Uma rampa lisa, de 20m de comprimento, faz
um ângulo de 30° com o plano horizontal. Uma
pessoa que sobe esta rampa inteira eleva-se
verticalmente:
a) 17m b) 10m c) 15m
d) 5m e) 8m
17) Calcule x indicado na figura:
Números Complexos
Na matemática temos o conceito de numero
complexos que nos ajudam a resolver os
problemas de corrente alternada (CA). O conjunto
dos números complexos e formado pela soma da
parte real e da parte imaginaria do numero.
Z = a + j . b = parte real + parte imaginaria
sendo que {a, b R e j2 = -1}
A parte imaginaria e composta pelo termo “j”, que
corresponde i = .

Observe que a raiz quadrada de menos um não tem
solução no conjunto dos números reais e por isso e
classificada agora como numero imaginário.
Representação geométrica dos números
complexos
Uma maneira de definir o conjunto dos números
complexos e um conjunto de pares ordenados de
números reais (a,b) em que estão definidas:
· Igualdade:
(a, b) = (c, d) portanto a = c e b = d
O plano cartesiano no qual estão representados os
números complexos e denominado plano
complexo. Dizemos que o ponto P(a, b) e o afixo
do numero complexo a + j.b . Podemos associar a
cada numero complexo Z = a + j*b um único vetor
com extremidades no ponto 0, origem do sistema
de coordenadas cartesianas, e no ponto P(a, b).
Numero complexo na forma retangular
Z = a + j . b
A forma apresentada corresponde a forma
retangular, que permite realizar somas e subtrações
dos números, bastando somar todos os termos reais
entre si e separadamente os termos imaginários,
conforme o exemplo:
Z1 = a + j.b
Z2 = c + j.d
Z3 = e + j.f
Z1 + Z2 + Z3 = (a + c + e) + j . (b + d + f)
Numero complexo na forma polar
Uma outra forma de representar os números
complexos e a forma polar, que consiste em
representar um numero através de um angulo de
defasagem e o valor da distancia do ponto a sua
referencia.
módulo
fase
Neste tipo de representação podemos efetuar as
multiplicações e divisões, da seguinte forma: o
modulo e multiplicado ou dividido, e o ângulo
somando nas multiplicações e subtraído nas
divisões. Veja exemplos:
Conversão
Para realizar conversão entre as duas formas
utilizamos a função de conversão de retangular
para polar (R→ P ou x → θ) na calculadora, ou
utilizamos as formulas abaixo:

Para conversão polar para retangular, utilizamos as
funções inversas na calculadora, ou as formulas de
trigonometria abaixo:
Exercício:
1) Represente no plano complexo os seguintes
números complexos na forma retangular:
a) Z1 = 6 b) Z2 = 2 - j3
c) Z3 = j4 d) Z4 = -3 + j2
e) Z5 = -4 - j4 g) Z6 = 3 + j3
2) Represente no plano complexo os seguintes
números complexos na forma polar:
a) C1 = 5 b) Z7 = 1 ∟ 90°
c) Z8 = 1 ∟ 50° d) C2 = 10 ∟ 45°
e) Z9 = 5 ∟ 30° f) C3 = 3 ∟ 45º
3) Realize a adição e subtração dos números
complexos apresentados nos exercícios 01 e 02.
Observação: Para somar ou subtrair e mais
conveniente na forma retangular.
a) Z1 + Z3 b) Z6 – Z2 – Z1
c) C1 – C2 d) Z2 – Z5
e) C1 + C3 f) Z1 + C3
g) Z1 + Z4 + Z6 h) C2 – C1
i) Z4 – C1
4) Realize a multiplicação e a divisão dos numero
complexos apresentados nos exercícios 01 e 02
Observação: Neste caso e mais conveniente na
forma polar
a) Z1 * Z4 b) Z2 / Z5
c) C3 * C1 d) Z1 * C3
e) C3 / C2 f) Z3 * Z3
g) C3 * C3 * C3 h) (C2)²
i) (C5 / C3) * Z6
REFERÊNCIAS:
DANTE, L. R. Matemática: Contexto e
Aplicações. São Paulo: Editora Ática, 1999.
GIOVANNI, J. R., BONJORNO, J. R.,
GIOVANNI Jr, J. R. Matemática Fundamental.
São Paulo: Editora FTD Ltda, 1994.
LEITHOLD, L. Matemática Aplicada à Economia
e Administração. São Paulo: Editora Harbra Ltda,
1988.
MEDEIROS, Matemática Básica para Cursos
Superiores. São Paulo: Editora Atlas S.A., 2002.
WEBER, J. E. Matemática para Economia e
Administração. São Paulo: Editora Harbra Ltda, 2a
ed. 1986.
Fundamentos de Matemática Elementar, Gelson
Iezzi, Osvaldo Dolce & Carlos Murakami, São
Paulo, Atual Editora Ltda, edição 1977.
BOLDRINI, José Luiz. Álgebra linear: 591
problemas resolvidos, 442 problemas
suplementares. Ed. Harbra, 2004




![Informática_-_Apostila Completa e Atualizada 2009 [LFG]](https://img.document.onl/doc/110x75/557212ef497959fc0b913efc/informatica-apostila-completa-e-atualizada-2009-lfg.jpg)