Embed Size (px)
Citation preview
Princípios Teóricos da Estereoscopia
AIVITS – Ambientes de Imersão Virtual de Tecnologia Simplificada
LAGEAR – Laboratório Gráfico para Ensino da Arquitetura
EVA – Estúdio Virtual de Arquitetura
Escola de Arquitetura da UFMG
Agosto de 2008
Coordenadora: Prof. Maria Lúcia Malard
Colaboradores: José Cabral dos Santos Filho, Ana Paula Baltazar, Rodrigo
Peronti, Wallace Lages
Bolsistas: Marcus Braga Costa, Vanilson Cosme
APRESENTAÇÃO
O presente trabalho expõe e sistematiza informações pertinentes à produção de
imagens para visualizações estereoscópicas em meios digital (visualização em monitores
de computador, sejam de cristal líquido ou de tubos de raios catódicos, além de projeções
em grandes dimensões) e impresso (visualização em livros, revistas, mapas, etc), com o
auxílio de óculos especiais.
A seqüência de exposição das informações considera o nível de complexidade e
de entrelaçamento das mesmas, partindo-se de informações básicas relativas aos efeitos
físicos que sugerem noções de profundidade e chegando-se a informações complexas
relativas à percepção ótica do espaço a nossa volta, a qual ocorre no cérebro.
2
1. Aspectos fundamentais de mecanismos para captação de imagens
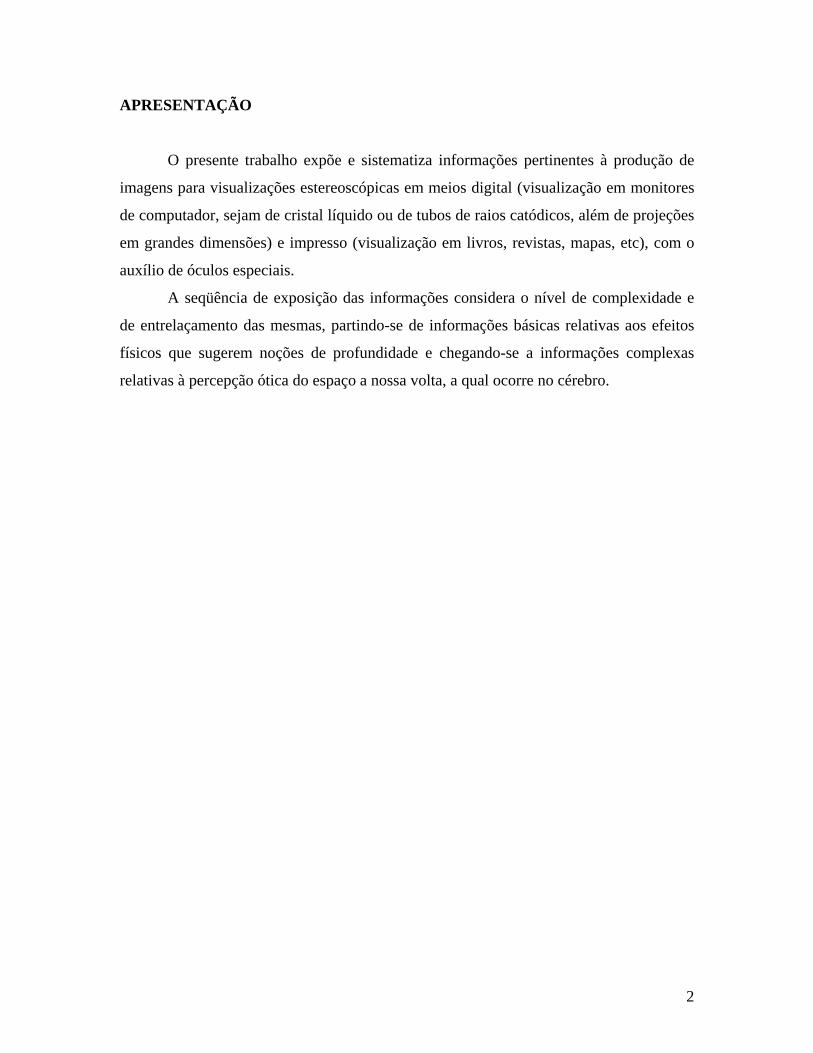
Considerando que mecanismos para captação de imagens, como máquinas
fotográficas, câmeras filmadoras e cada um dos olhos de um animal, correspondem ao
vértice cume de uma pirâmide, tem-se que:
o o centro geométrico da base destes sólidos corresponde ao foco visual (alvo a ser
visualizado) dos mecanismos para captação de imagens;
o os ângulos de abrangência do campo visual destes mecanismos correspondem aos
ângulos limitados pelo vértice cume e pelas faces inclinadas dos sólidos;
o a orientação destes mecanismos é definida pela reta que liga o vértice cume da
pirâmide (ponto de vista) ao centro geométrico de sua base (foco visual) e por
uma reta (usualmente chamada vector up) normal ao plano que contem a reta
suporte do ponto de vista e do foco visual.
Figura 01: Representação geométrica esquemática de um mecanismo para captação de
imagens.
3
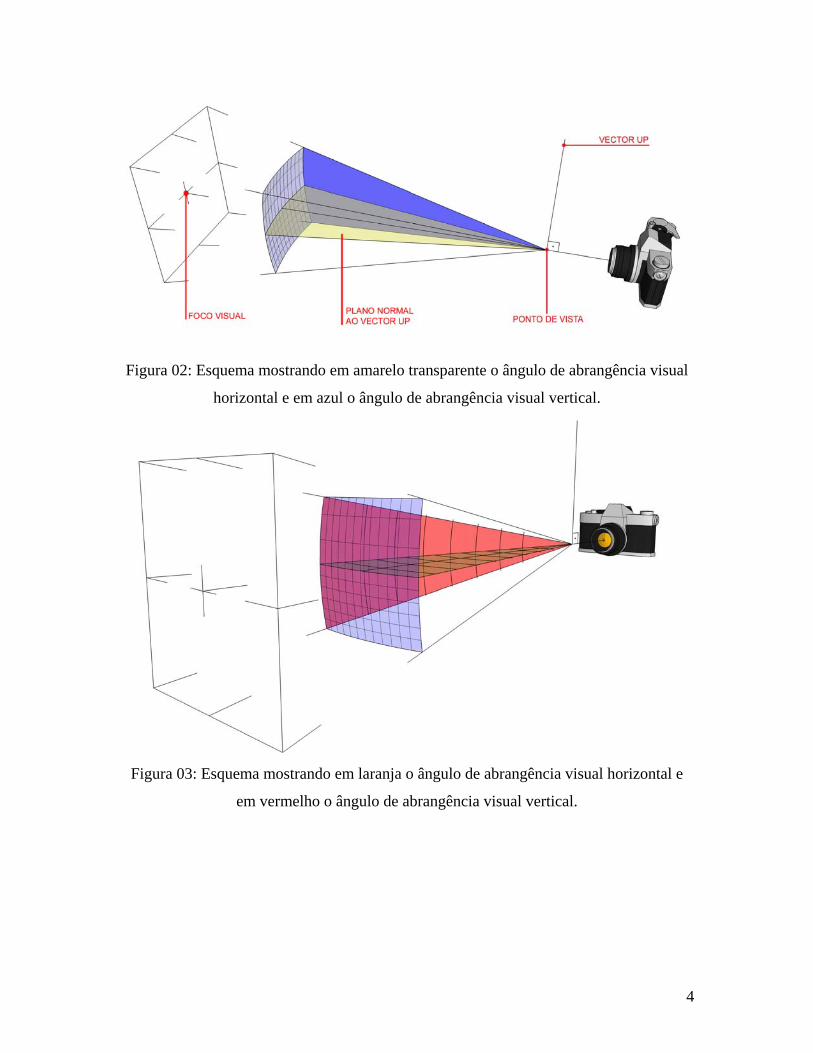
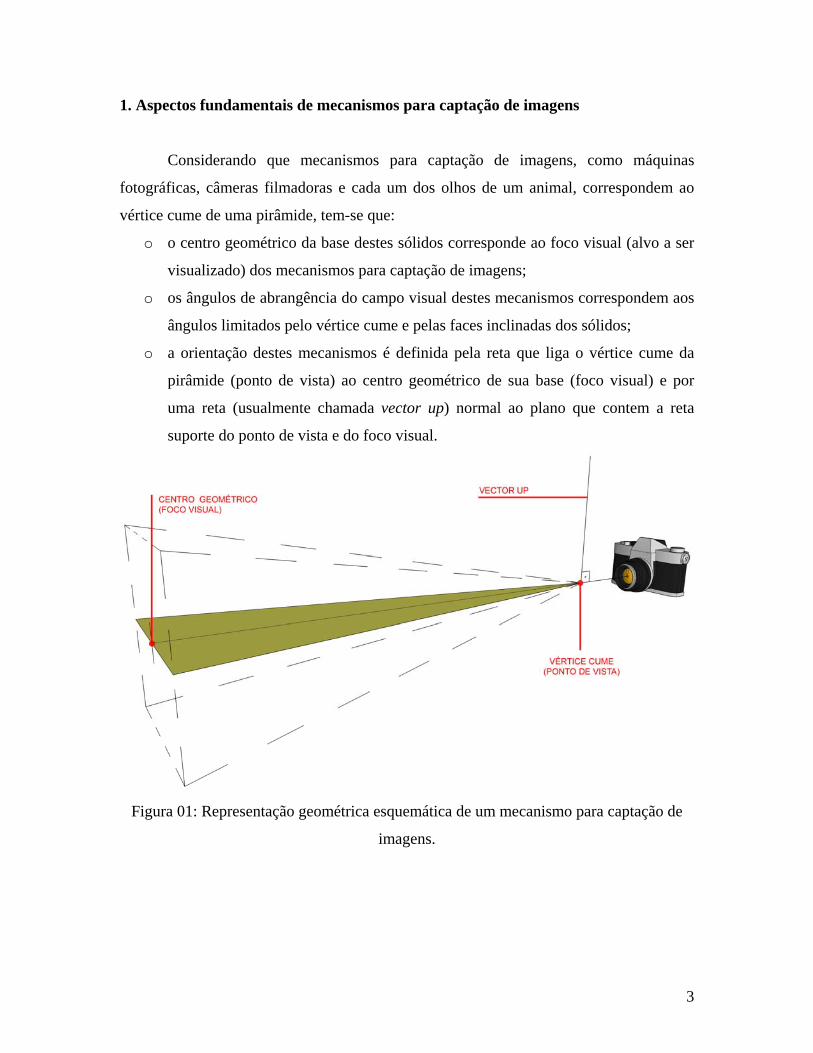
Figura 02: Esquema mostrando em amarelo transparente o ângulo de abrangência visual
horizontal e em azul o ângulo de abrangência visual vertical.
Figura 03: Esquema mostrando em laranja o ângulo de abrangência visual horizontal e
em vermelho o ângulo de abrangência visual vertical.
4
Figura 04: Esquema mostrando o ângulo de abrangência horizontal, contido no plano
normal ao vector up.
Figura 05: Esquema mostrando o ângulo de abrangência vertical de um mecanismo de
captação de imagens.
5
2. Estereoscopia
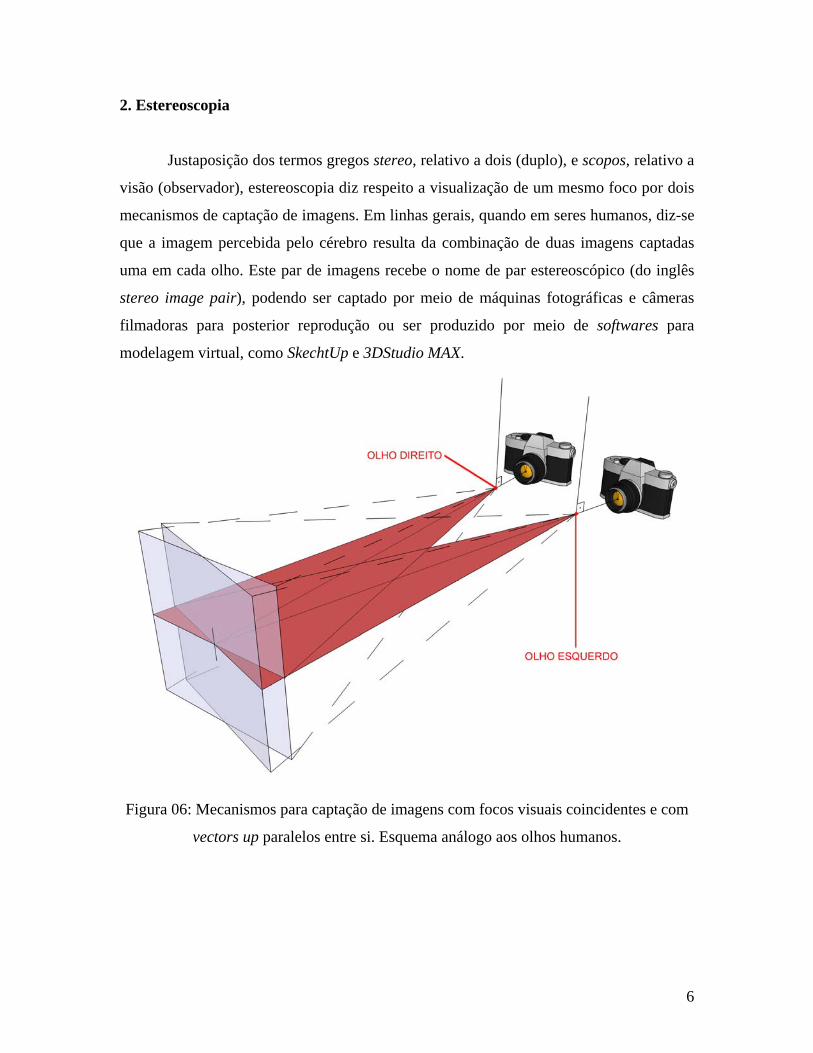
Justaposição dos termos gregos stereo, relativo a dois (duplo), e scopos, relativo a
visão (observador), estereoscopia diz respeito a visualização de um mesmo foco por dois
mecanismos de captação de imagens. Em linhas gerais, quando em seres humanos, diz-se
que a imagem percebida pelo cérebro resulta da combinação de duas imagens captadas
uma em cada olho. Este par de imagens recebe o nome de par estereoscópico (do inglês
stereo image pair), podendo ser captado por meio de máquinas fotográficas e câmeras
filmadoras para posterior reprodução ou ser produzido por meio de softwares para
modelagem virtual, como SkechtUp e 3DStudio MAX.
Figura 06: Mecanismos para captação de imagens com focos visuais coincidentes e com
vectors up paralelos entre si. Esquema análogo aos olhos humanos.
6
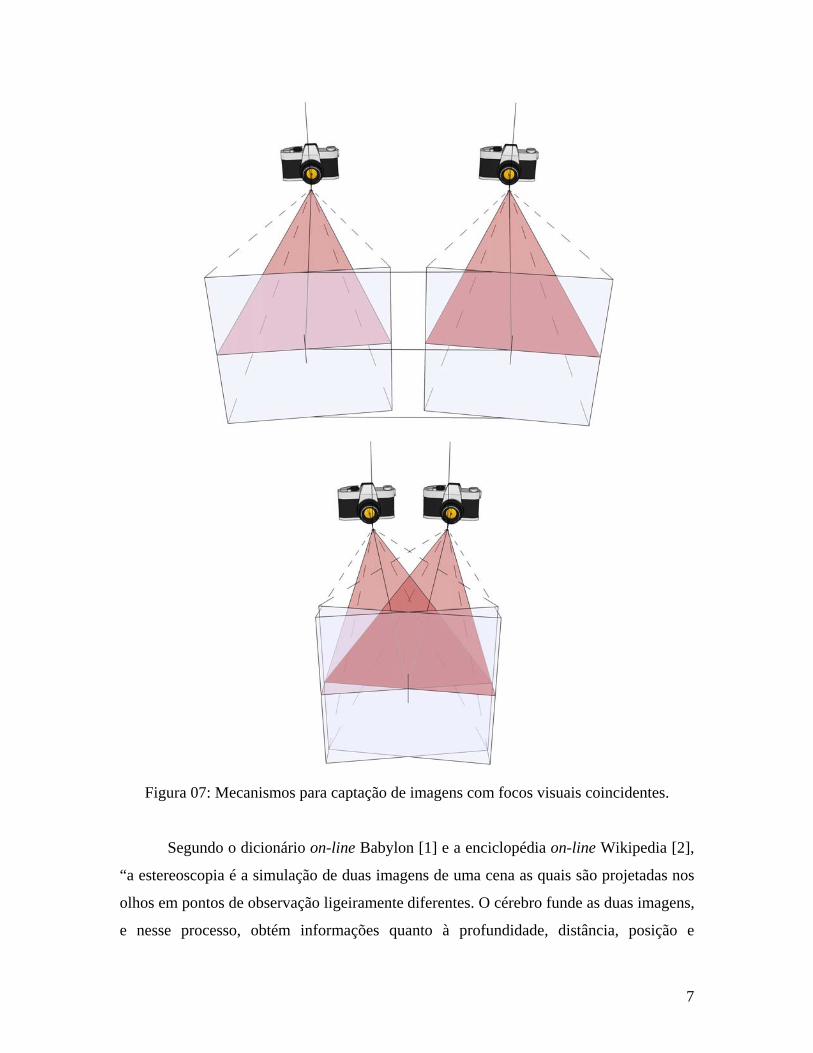
Figura 07: Mecanismos para captação de imagens com focos visuais coincidentes.
Segundo o dicionário on-line Babylon [1] e a enciclopédia on-line Wikipedia [2],
“a estereoscopia é a simulação de duas imagens de uma cena as quais são projetadas nos
olhos em pontos de observação ligeiramente diferentes. O cérebro funde as duas imagens,
e nesse processo, obtém informações quanto à profundidade, distância, posição e
7
tamanho dos objetos, gerando uma sensação de visão tridimensional. Por meio da
Estereoscopia, é possível a confecção de Cartas Topográficas num processo chamado
Restituição, no qual um operador é capaz, a partir de duas fotografias aéreas, ver a
imagem de um terreno em três dimensões, sendo assim capaz de desenhar o que se vê
num aparelho restituidor.”
Ressalta-se, no entanto, que a obtenção de informações relativas a distâncias,
posições e tamanhos de objetos não se deve somente à fusão do chamado par
estereoscópico. São efeitos inerentes à aparência do espaço e independentes de
mecanismos para captação de imagens (olhos, a exemplo) a iluminação, a oclusão e as
sombras [3], enquanto que a percepção perspectivada do espaço decorre de características
próprias dos mecanismos (ângulo de abrangência do campo visual, a exemplo), não sendo
condicionada significativamente pela fusão do par estereoscópico.
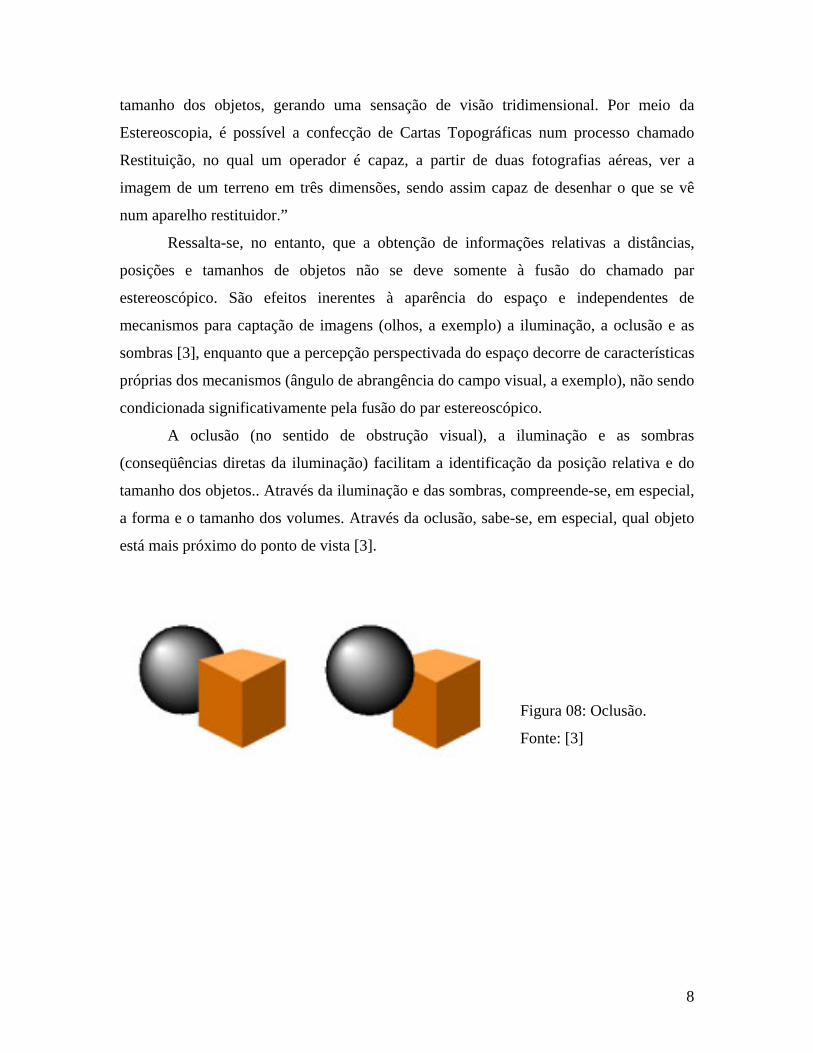
A oclusão (no sentido de obstrução visual), a iluminação e as sombras
(conseqüências diretas da iluminação) facilitam a identificação da posição relativa e do
tamanho dos objetos.. Através da iluminação e das sombras, compreende-se, em especial,
a forma e o tamanho dos volumes. Através da oclusão, sabe-se, em especial, qual objeto
está mais próximo do ponto de vista [3].
Figura 08: Oclusão.
Fonte: [3]
8

Figura 09: Situação sem
iluminação. Fonte: [3]
Figura 10: Situação com
iluminação. Fonte: [3]
Figura 11: Situação com
iluminação e sombra. Fonte :[3]
3. Perspectiva
Do latim perspectiva, que se relaciona ao termo “ponto-de-vista” [4], significa
“representação de um fenômeno tridimensional em uma superfície bidimensional” ou
aspecto da percepção visual do espaço e dos objetos nele contidos captados pelos olhos
sejam de seres humanos sejam de animais[5].
9
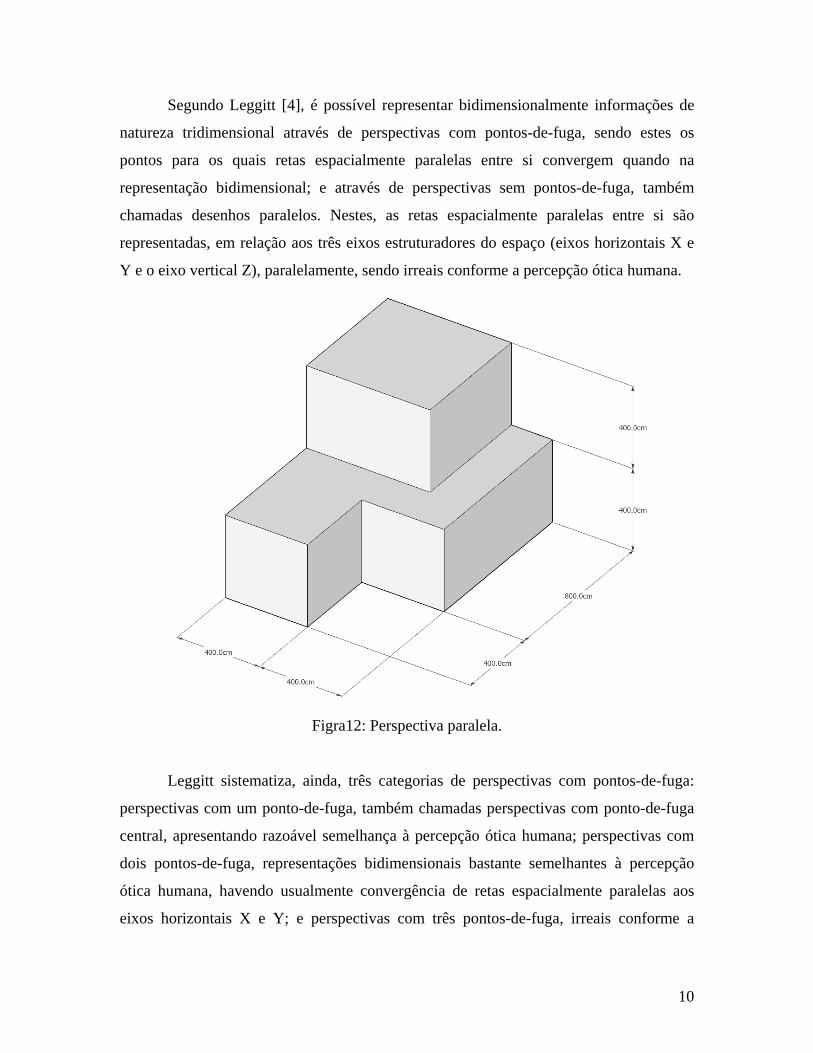
Segundo Leggitt [4], é possível representar bidimensionalmente informações de
natureza tridimensional através de perspectivas com pontos-de-fuga, sendo estes os
pontos para os quais retas espacialmente paralelas entre si convergem quando na
representação bidimensional; e através de perspectivas sem pontos-de-fuga, também
chamadas desenhos paralelos. Nestes, as retas espacialmente paralelas entre si são
representadas, em relação aos três eixos estruturadores do espaço (eixos horizontais X e
Y e o eixo vertical Z), paralelamente, sendo irreais conforme a percepção ótica humana.
Figra12: Perspectiva paralela.
Leggitt sistematiza, ainda, três categorias de perspectivas com pontos-de-fuga:
perspectivas com um ponto-de-fuga, também chamadas perspectivas com ponto-de-fuga
central, apresentando razoável semelhança à percepção ótica humana; perspectivas com
dois pontos-de-fuga, representações bidimensionais bastante semelhantes à percepção
ótica humana, havendo usualmente convergência de retas espacialmente paralelas aos
eixos horizontais X e Y; e perspectivas com três pontos-de-fuga, irreais conforme a
10
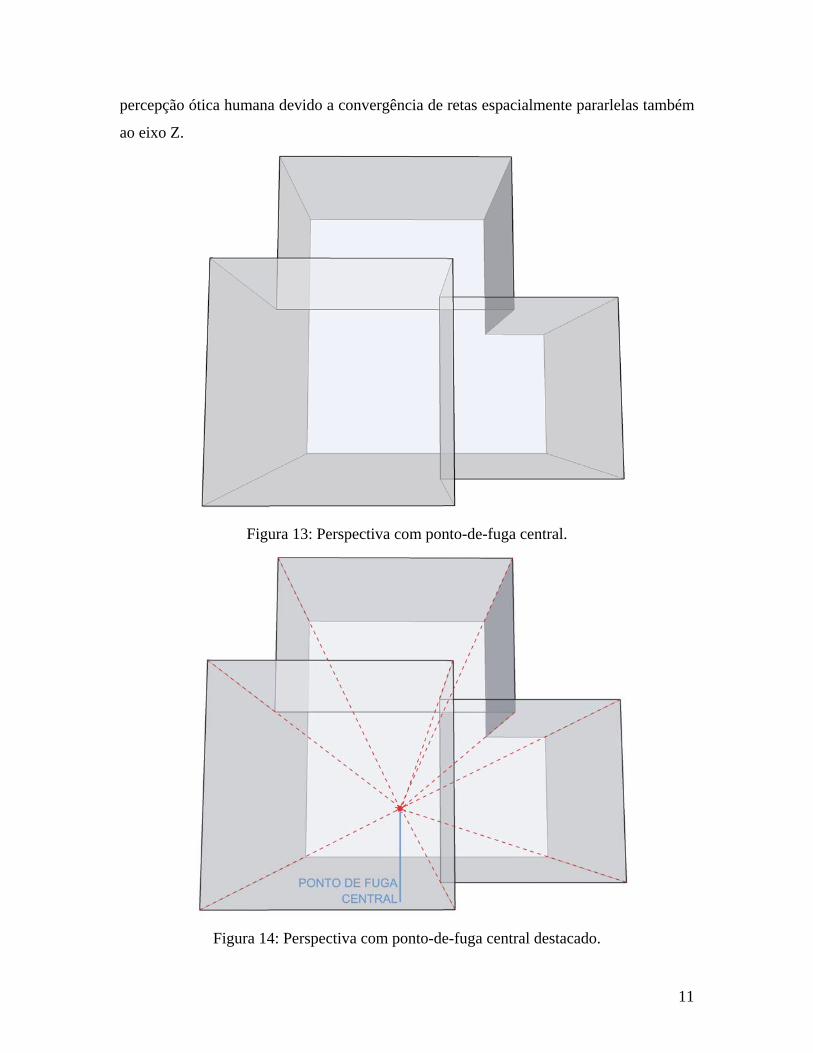
percepção ótica humana devido a convergência de retas espacialmente pararlelas também
ao eixo Z.
Figura 13: Perspectiva com ponto-de-fuga central.
Figura 14: Perspectiva com ponto-de-fuga central destacado.
11
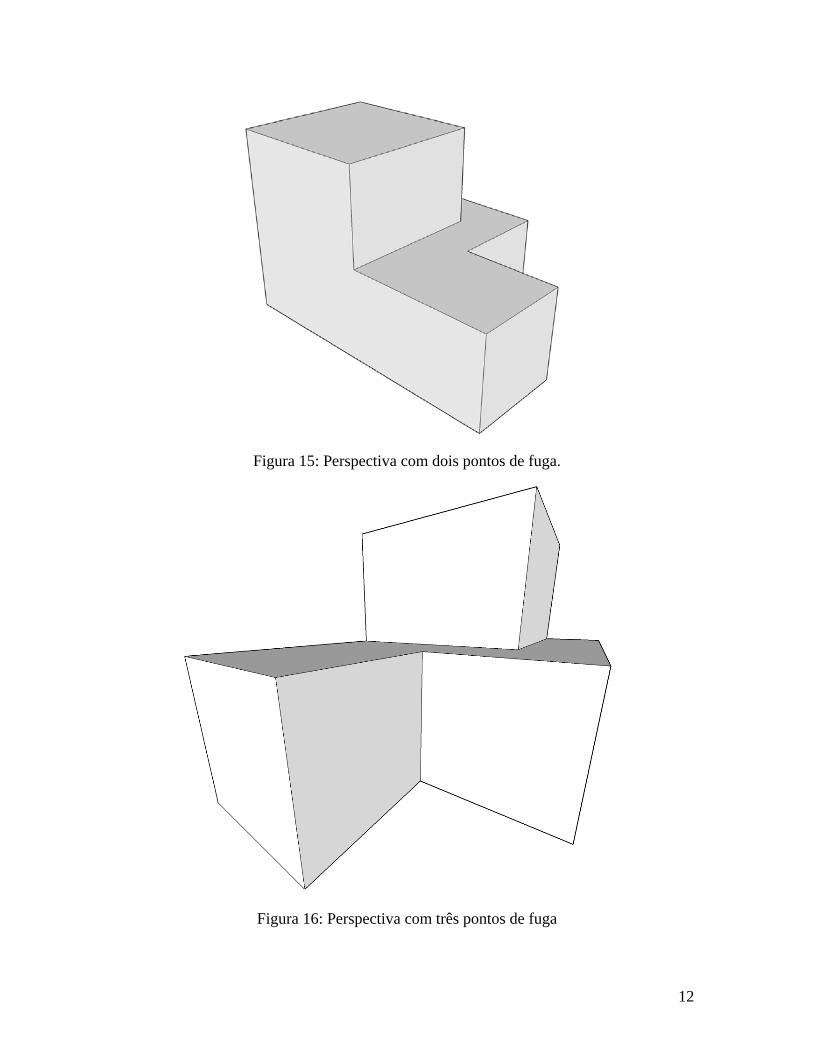
Figura 15: Perspectiva com dois pontos de fuga.
Figura 16: Perspectiva com três pontos de fuga
12
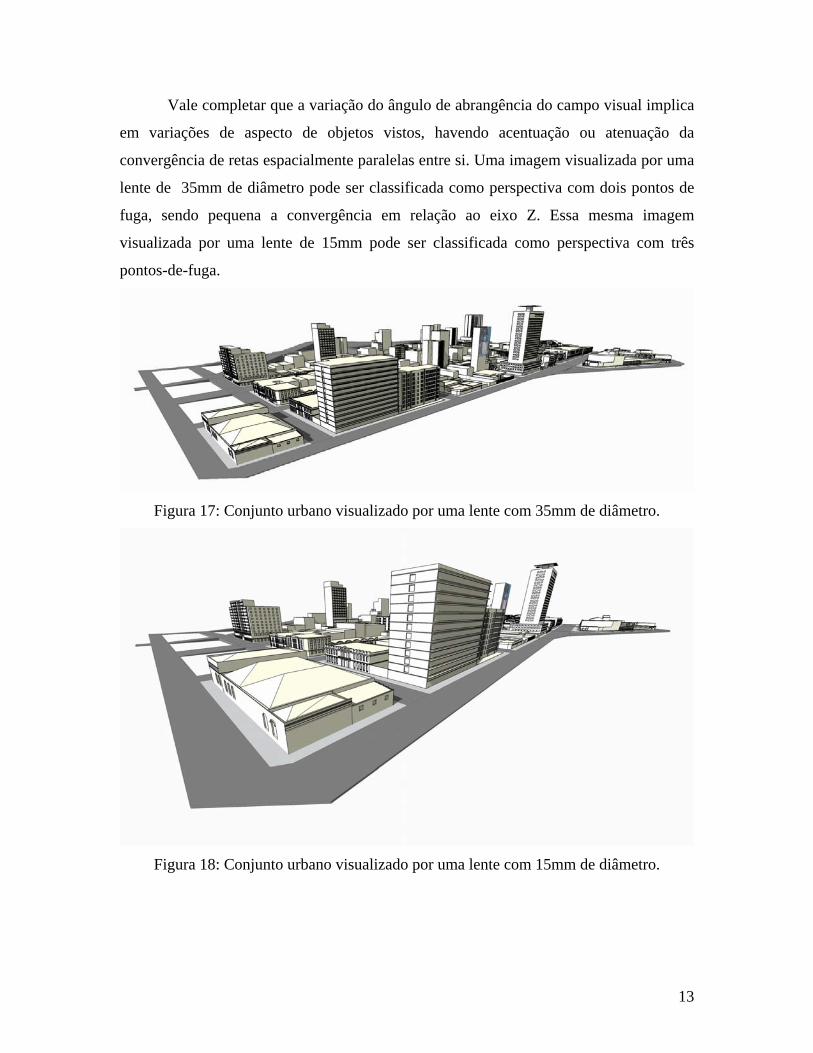
Vale completar que a variação do ângulo de abrangência do campo visual implica
em variações de aspecto de objetos vistos, havendo acentuação ou atenuação da
convergência de retas espacialmente paralelas entre si. Uma imagem visualizada por uma
lente de 35mm de diâmetro pode ser classificada como perspectiva com dois pontos de
fuga, sendo pequena a convergência em relação ao eixo Z. Essa mesma imagem
visualizada por uma lente de 15mm pode ser classificada como perspectiva com três
pontos-de-fuga.
Figura 17: Conjunto urbano visualizado por uma lente com 35mm de diâmetro.
Figura 18: Conjunto urbano visualizado por uma lente com 15mm de diâmetro.
13
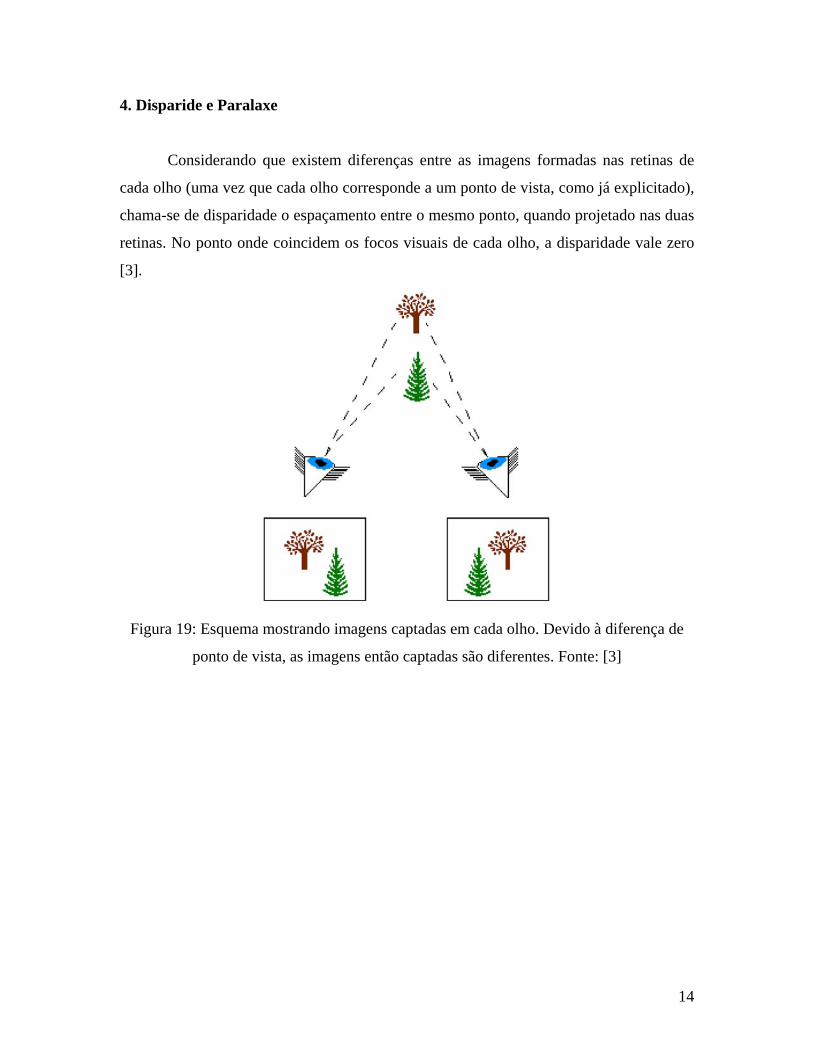
4. Disparide e Paralaxe
Considerando que existem diferenças entre as imagens formadas nas retinas de
cada olho (uma vez que cada olho corresponde a um ponto de vista, como já explicitado),
chama-se de disparidade o espaçamento entre o mesmo ponto, quando projetado nas duas
retinas. No ponto onde coincidem os focos visuais de cada olho, a disparidade vale zero
[3].
Figura 19: Esquema mostrando imagens captadas em cada olho. Devido à diferença de
ponto de vista, as imagens então captadas são diferentes. Fonte: [3]
14
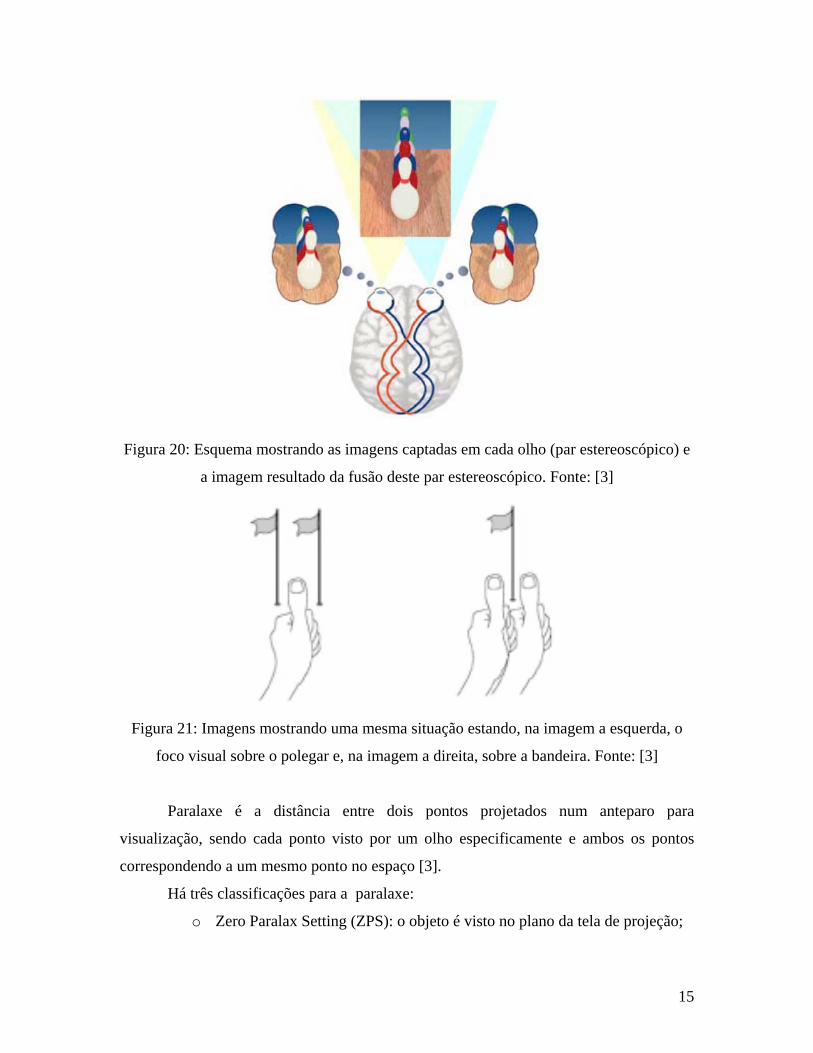
Figura 20: Esquema mostrando as imagens captadas em cada olho (par estereoscópico) e
a imagem resultado da fusão deste par estereoscópico. Fonte: [3]
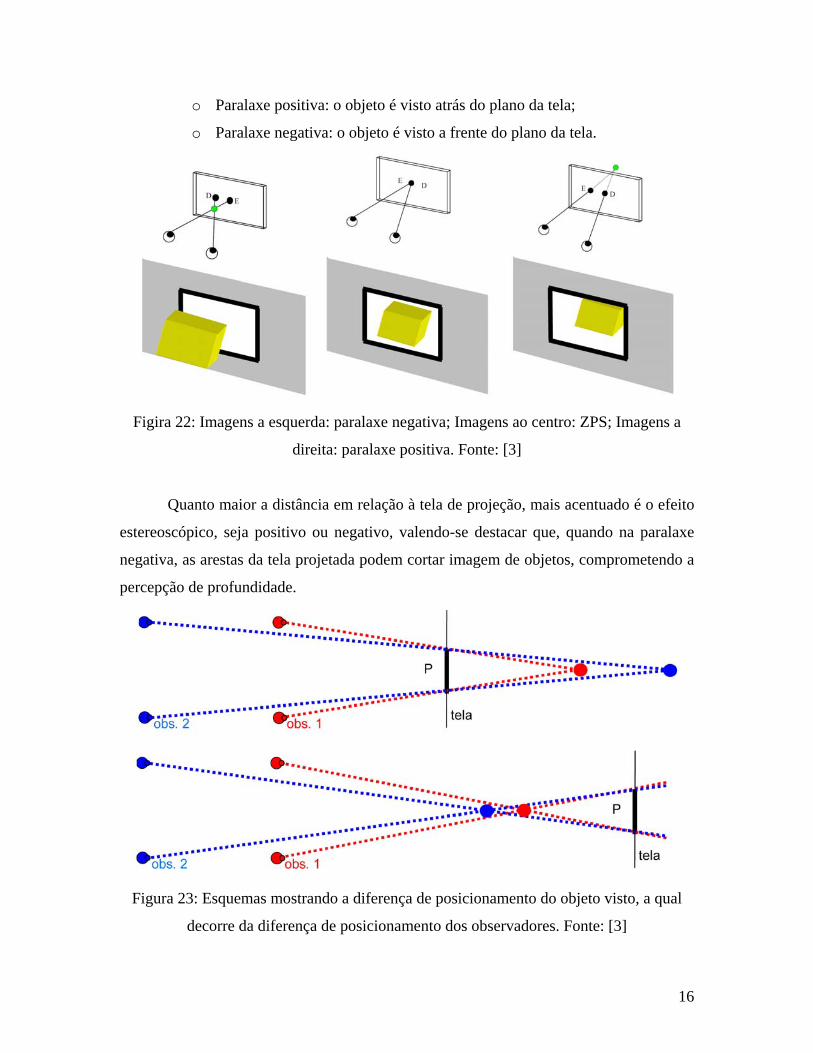
Figura 21: Imagens mostrando uma mesma situação estando, na imagem a esquerda, o
foco visual sobre o polegar e, na imagem a direita, sobre a bandeira. Fonte: [3]
Paralaxe é a distância entre dois pontos projetados num anteparo para
visualização, sendo cada ponto visto por um olho especificamente e ambos os pontos
correspondendo a um mesmo ponto no espaço [3].
Há três classificações para a paralaxe:
o Zero Paralax Setting (ZPS): o objeto é visto no plano da tela de projeção;
15
o Paralaxe positiva: o objeto é visto atrás do plano da tela;
o Paralaxe negativa: o objeto é visto a frente do plano da tela.
Figira 22: Imagens a esq centro: ZPS; Imagens a
direita: paralaxe positiva. Fonte: [3]
rojetada podem cortar imagem de objetos, comprometendo a
percepção de profundidade.
uerda: paralaxe negativa; Imagens ao
Quanto maior a distância em relação à tela de projeção, mais acentuado é o efeito
estereoscópico, seja positivo ou negativo, valendo-se destacar que, quando na paralaxe
negativa, as arestas da tela p
3: Esquemas mostrando a diferença de posicionamento do objeto vistoFigura 2 , a qual
decorre da diferença de posicionamento dos observadores. Fonte: [3]
16
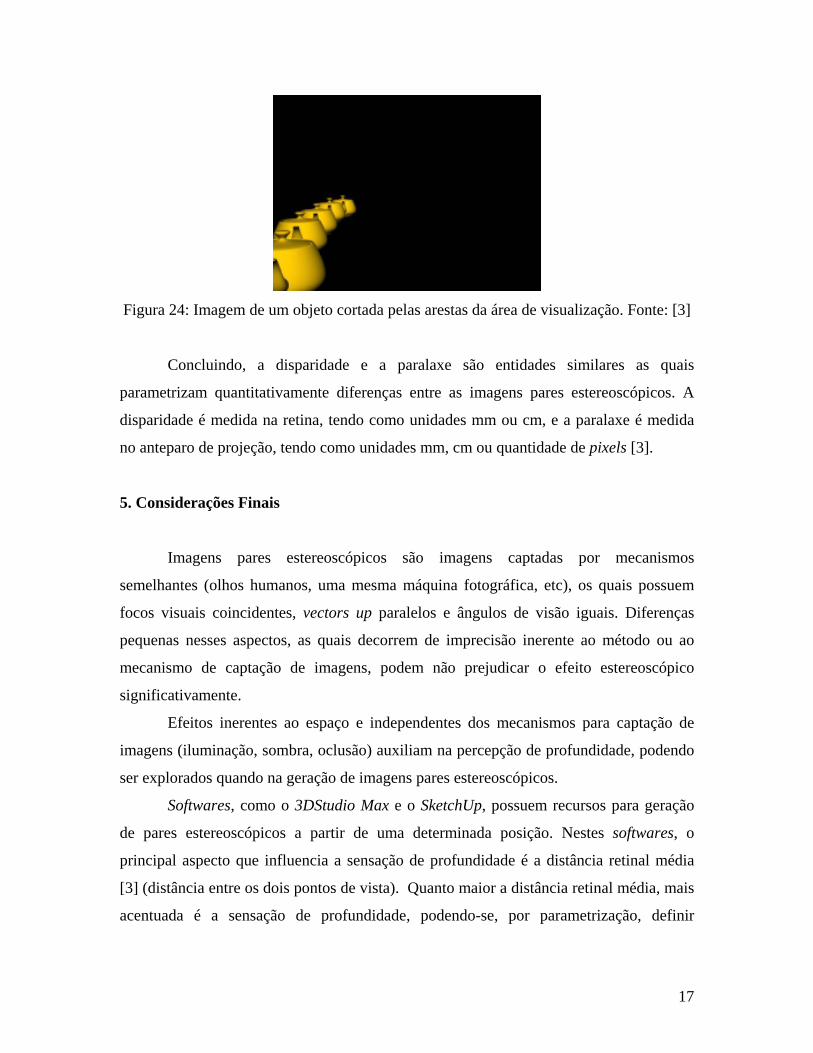
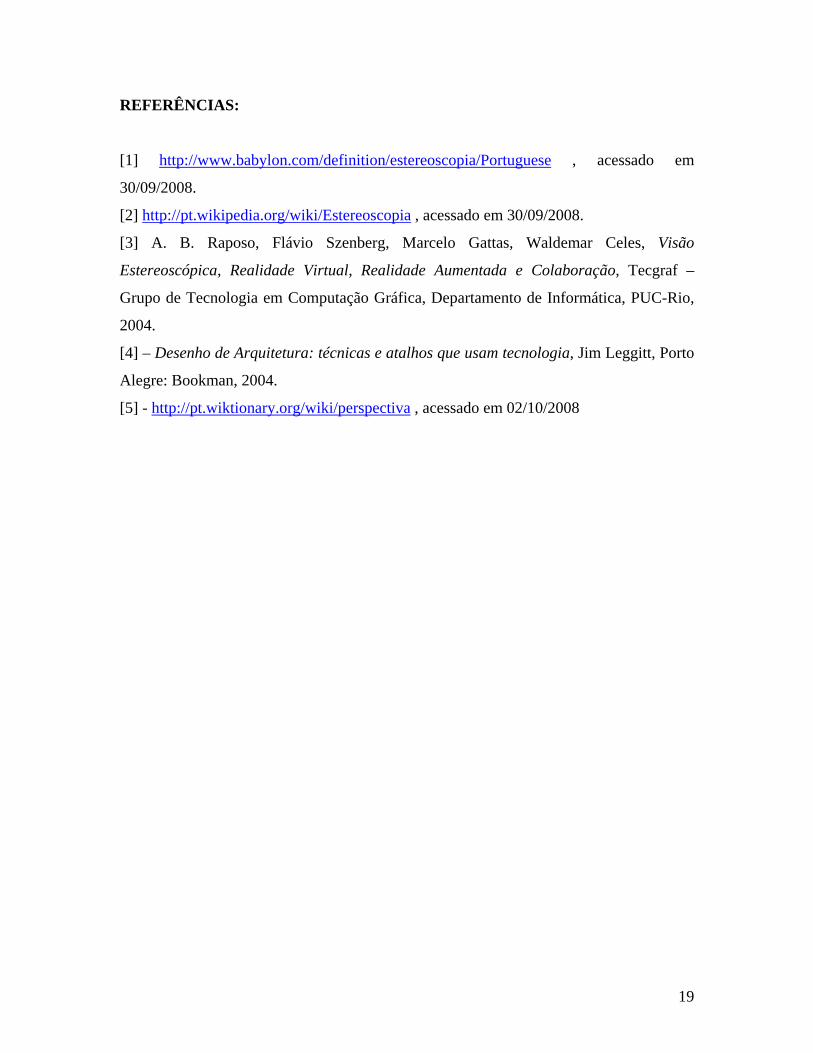
Figura 24: Imagem de um objeto cortada pelas arestas da área de visualização. Fonte: [3]
Concluindo, a disparidade e a paralaxe são entidades similares as quais
parametrizam quantitativamente diferenças entre as imagens pares estereoscópicos. A
disparidade é medida na retina, tendo como unidades mm ou cm, e a paralaxe é medida
no anteparo de projeção, tendo como unidades mm, cm ou quantidade de pixels [3].
5. Considerações Finais
Imagens pares estereoscópicos são imagens captadas por mecanismos
semelhantes (olhos humanos, uma mesma máquina fotográfica, etc), os quais possuem
focos visuais coincidentes, vectors up paralelos e ângulos de visão iguais. Diferenças
pequenas nesses aspectos, as quais decorrem de imprecisão inerente ao método ou ao
mecanismo de captação de imagens, podem não prejudicar o efeito estereoscópico
significativamente.
Efeitos inerentes ao espaço e independentes dos mecanismos para captação de
imagens (iluminação, sombra, oclusão) auxiliam na percepção de profundidade, podendo
ser explorados quando na geração de imagens pares estereoscópicos.
Softwares, como o 3DStudio Max e o SketchUp, possuem recursos para geração
de pares estereoscópicos a partir de uma determinada posição. Nestes softwares, o
principal aspecto que influencia a sensação de profundidade é a distância retinal média
[3] (distância entre os dois pontos de vista). Quanto maior a distância retinal média, mais
acentuada é a sensação de profundidade, podendo-se, por parametrização, definir
17

distâncias maiores que a distância retinal média humana (64mm), obtendo-se imagens
estereoscópicas impossíveis de serem captadas naturalmente pelo olhos humanos.
18
REFERÊNCIAS:
[1] http://www.babylon.com/definition/estereoscopia/Portuguese , acessado em
30/09/2008.
[2] http://pt.wikipedia.org/wiki/Estereoscopia , acessado em 30/09/2008.
[3] A. B. Raposo, Flávio Szenberg, Marcelo Gattas, Waldemar Celes, Visão
Estereoscópica, Realidade Virtual, Realidade Aumentada e Colaboração, Tecgraf –
Grupo de Tecnologia em Computação Gráfica, Departamento de Informática, PUC-Rio,
2004.
[4] – Desenho de Arquitetura: técnicas e atalhos que usam tecnologia, Jim Leggitt, Porto
Alegre: Bookman, 2004.
[5] - http://pt.wiktionary.org/wiki/perspectiva , acessado em 02/10/2008
19