MODELO DE SISTEMA PASSIVO DE COMPENSAÇÃO DE HEAVE PARA
OPERAÇÕES DE INSTALAÇÃO DE EQUIPAMENTOS SUBMARINOS EM
ÁGUAS ULTRAPROFUNDAS.
Eduardo Santos Mello
TESE SUBMETIDA AO CORPO DOCENTE DA COORDENAÇÃO DOS
PROGRAMAS DE PÓS-GRADUAÇÃO DE ENGENHARIA DA UNIVERSIDADE
FEDERAL DO RIO DE JANEIRO COMO PARTE DOS REQUISITOS
NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE MESTRE EM CIÊNCIAS EM
ENGENHARIA OCEÂNICA.
Aprovada por:
________________________________________________
Prof. Murilo Augusto Vaz, Ph.D.
________________________________________________ Prof. Severino Fonseca da Silva, D. Sc.
________________________________________________ Prof. Antonio Carlos Fernandes, Ph. D.
________________________________________________ Prof. Ivan Carlos Pimentel da Cruz, D. Sc.
RIO DE JANEIRO, RJ - BRASIL
MARÇO DE 2004

ii
MELLO, EDUARDO SANTOS.
Modelo de sistema passivo de compensação
de heave para operações de instalação de
equipamentos submarinos em águas
ultraprofundas. [Rio de Janeiro] 2004.
XI, 92 p. 29,7 cm (COPPE/UFRJ, M.Sc.,
Engenharia Oceânica, (2004).
Tese - Universidade Federal do Rio de
Janeiro, COPPE.
1. Compensador de Heave. 2. Construção
Submarina.
I. COPPE/UFRJ. II. Título (série).

iii
Aos meus pais, Ronaldo e Ma José,
minha esposa Kárita e aos meus filhos
Lucas e Juliana.

iv
AGRADECIMENTOS
Ao Prof. Murilo A. Vaz, pela confiança, principalmente nos momentos de
maiores dificuldades, e pela orientação em todas as fases do curso.
Ao amigo Peter Tanscheit, pelo apoio para minha participação no curso, e que
intercedeu de forma brilhante nas dificuldades encontradas durante o desenvolvimento
de minhas atividades.
Ao Odd Kvello, por viabilizar meu ingresso no curso, durante desenvolvimento
de projetos de grande importância para o departamento de engenharia da Subsea 7.
Ao Prof. Ivan Cruz e aos Engenheiros Lúcio Ferreira e Pablo Fraga, pelo
auxílio de forma ímpar no desenvolvimento do meu trabalho.
Aos amigos Renato Marcenal, Wagner Junqueira, Thierry Courtès, Geraldo
Guimarães, Rafael Lima, Renato Jardim, Fábio Natividade, Claudio Barbosa, Roberto
Amaral e Marieli Diório, pelo apoio, incentivo e compreensão.
Aos meus pais, por terem passado a mim, desde criança, a paixão pelo mar,
respeitando e admirando sua força e seus segredos.
Ao Sr. Michael Philip Jagger, pelas palavras de sabedoria nas horas mais
estressantes.
Ao Sr. J. Daniel, pela qualidade de sua obra que continua a influenciar-me dia
após dia.
Ao meu filho Lucas, por lembrar-me a todo instante qual o verdadeiro sentido
da vida.

v
Resumo da Tese apresentada à COPPE/UFRJ como parte dos requisitos necessários
para a obtenção do grau de Mestre em Ciências (M.Sc.)
MODELO DE SISTEMA PASSIVO DE COMPENSAÇÃO DE HEAVE PARA
OPERAÇÕES DE INSTALAÇÃO DE EQUIPAMENTOS SUBMARINOS EM
ÁGUAS ULTRAPROFUNDAS
Eduardo Santos Mello
Março/2004
Orientador: Murilo Augusto Vaz Programa: Engenharia Oceânica
Este trabalho desenvolve um modelo para fundamentar projetos de
compensadores do efeito da onda (heave) em uma dada embarcação de lançamento
para o uso em intervenções submarinas onde a carga a ser manipulada é um
equipamento submersível, ou estrutura que necessita de precisão e controle durante sua
instalação, a partir de um método utilizado para sistemas de compensação aplicado a
sistemas de ROV (Veículo de Operação Remota). A principal preocupação para o
desenvolvimento do modelo tem um ponto de vista extremamente prático, cuja
característica principal é a operacionalidade do navio de instalação, isto é, a operação
nas condições mais severas de mar.
Foram realizadas diversas simulações em software reconhecido a fim de
identificar as condições mais severas de operação, a partir daí foi aplicada a
metodologia apresentada.
Como resultado principal obteve-se uma metodologia de otimização de
parâmetros de compensação de compensadores passivos para a operação de
embarcações de instalação submarina, uma vez que os resultados mostraram-se
satisfatórios para as condições propostas, com diminuição sensível do efeito da onda
sobre a operação de instalação.

vi
Abstract of Thesis presented to COPPE/UFRJ as a partial fulfillment of the
requirements for the degree of Master of Science (M.Sc.)
A PASSIVE HEAVE COMPENSATION SYSTEM MODEL
FOR ULTRADEEPWATER SUBSEA EQUIPMENT INSTALLATION
Eduardo Santos Mello
March / 2004
Advisor: Murilo Augusto Vaz
Department: Ocean Engineering
This work develops a model to guide projects of compensators for the effect of
waves on an installation vessel (heave) to be used on subsea intervention works where
the load to be handled is a submersible equipment, or a structure that demands precision
and control during installation, based on a method used on compensation system for
ROV (Remote Operated Vehicle). The main concern for the development of this model
has a very practical point of view, which its main characteristic is the efficiency of the
installation vessel, i.e., the operation at the most severe sea state.
Several simulations on reliable software were performed to identify the most
severe operation conditions, and then the method presented was applied.
As result, it was provided one methodology to maximize the parameters of
passive compensators for operations on installation vessels for subsea constructions,
due to the results that were satisfactory for the purposed conditions, with a significant
reduction of the wave effect on the installation.

vii
ÍNDICE
1 INTRODUÇÃO ................................................................................................................................... 1
1.1 A ORGANIZAÇÃO DO TEXTO................................................................................................. 4
2 A INSTALAÇÃO DE EQUIPAMENTOS SUBMARINOS............................................................ 6
2.1 UMA VISÃO GERAL SOBRE INSTALAÇÃO SUBMARINA................................................. 6
2.2 PRINCIPAIS MÉTODOS DE INSTALAÇÃO.......................................................................... 11
3 SISTEMAS DE COMPENSAÇÃO DE HEAVE NA CONSTRUÇÃO SUBMARINA ............. 15
3.1 PRINCÍPIOS BÁSICOS DOS SISTEMAS DE COMPENSAÇÃO DE HEAVE ..................... 16
3.1.1 Sistemas Passivos ................................................................................................................ 17
3.1.2 Sistemas Ativos ................................................................................................................... 18
3.1.3 Sistemas Semi-Ativos.......................................................................................................... 19
3.1.4 Prós e Contras dos Sistemas Existentes .............................................................................. 20
3.2 DESENVOLVIMENTOS RECENTES E O “ESTADO DA ARTE”....................................... 21
4 MODELO DO SISTEMA PASSIVO DE COMPENSAÇÃO DE HEAVE ................................. 24
4.1 MOTIVAÇÃO............................................................................................................................. 24
4.2 MODELO MECÂNICO E NUMÉRICO DO SISTEMA........................................................... 25
4.3 HIPÓTESES E FRONTEIRAS DO MODELO.......................................................................... 29
5 ESTUDO DE CASO .......................................................................................................................... 31
5.1 CENÁRIO ................................................................................................................................... 31
5.2 PARÂMETROS DO MODELO ................................................................................................. 32
5.2.1 Parâmetros para Espectro de Onda...................................................................................... 32
5.2.1.1 Dados de Entrada do Espectro de Onda no Programa Orcaflex ..................................... 33
5.2.2 Propriedades do Cabo do Guincho...................................................................................... 34

viii
5.2.3 Propriedades da Embarcação de Instalação......................................................................... 38
5.2.4 Propriedades do PLEM........................................................................................................ 38
5.3 DESCRIÇÃO DA APLICAÇÃO DO MODELO....................................................................... 41
5.3.1 Identificação da Condição Crítica de Mar........................................................................... 41
5.3.2 Simulação Dinâmica Não-Compensada.............................................................................. 43
5.3.3 Estudo de Valores para Aplicação na Simulação Compensada .......................................... 50
5.3.3.1 Determinação do Valor de Rigidez e Amortecimento .................................................... 51
5.3.4 Simulação Dinâmica Compensada...................................................................................... 54
5.4 RESULTADOS ........................................................................................................................... 59
5.5 COMENTÁRIOS SOBRE OS RESULTADOS ......................................................................... 60
5.5.1 Discussão Sobre a Relação da Compressibilidade do Gás e a Rigidez............................... 61
6 CONCLUSÕES.................................................................................................................................. 69
6.1 RESUMO FINAL........................................................................................................................ 69
6.2 TRABALHOS FUTUROS.......................................................................................................... 71
7 BIBLIOGRAFIA ............................................................................................................................... 72
APÊNDICES .............................................................................................................................................. 77
A.1 PRINCÍPIOS BÁSICOS DO PROGRAMA ORCAFLEX......................................................... 77
a. Princípio da Análise Estática........................................................................................................... 77
b. Princípio da Análise Dinâmica........................................................................................................ 78
A.2 TEORIA DE ONDAS ................................................................................................................. 81
A.3 MOVIMENTOS DO NAVIO ..................................................................................................... 88

ix
ÍNDICE DE FIGURAS
Figura 1 – Exemplo de Instalação Através de Cabos-Guia ............................................. 7
Figura 2 – Método de Instalação em Lay-Away ............................................................... 8
Figura 3 – Método de Instalação com Sonda Versus Instalação com Navio de
Lançamento ...................................................................................................................... 9
Figura 4 – Esquema de Lançamento de um PLEM ........................................................ 11
Figura 5 – Esquema de Lançamento de um Skid ............................................................ 12
Figura 6 – Esquema de Lançamento de um Skid Suportado Pelas Linhas .................... 12
Figura 7 – Esquema de Lançamento de um Módulo Choke para Conexão em Manifold
........................................................................................................................................ 13
Figura 8 – Esquema de Conexão em 1ª Extremidade ..................................................... 13
Figura 9 – Esquema de Conexão em 2ª Extremidade ..................................................... 14
Figura 10 – Esquema de Conexão com Sustentação pelo Duto ..................................... 14
Figura 11 – Representação Simplificada dos Movimentos Gerados Durante uma
Operação de Instalação Submarina ............................................................................... 15
Figura 12 – Esquema do Compensador Passivo ............................................................ 18
Figura 13 – Esquema do Compensador Semi-Ativo ....................................................... 19
Figura 14 – Representação Elementar do Sistema ......................................................... 26
Figura 15 – Configuração do Método Não-Compensado de Descida pela Popa do Navio
........................................................................................................................................ 31
Figura 16 – Cabo com Alma de Aço ............................................................................... 36
Figura 17 – Altura de Onda (m) em Função do Tempo (s) em 1 Ano ............................ 41
Figura 18 – Perfil de Onda na Região de Maior Pico ................................................... 42
Figura 19 – Perfil de Onda na Região de Maior Vale ................................................... 43

x
Figura 20 – Curvas Sobrepostas da Onda e A-Frame para o Intervalo que Contém o
Maior Pico de Onda ....................................................................................................... 44
Figura 21 – Curvas Sobrepostas da Onda e A-Frame e PLEM para o Intervalo que
Contém o Maior Pico de Onda (Detalhe) ...................................................................... 45
Figura 22 – Curvas Sobrepostas da Onda e A-Frame para o Intervalo que Contém o
Maior Vale ...................................................................................................................... 46
Figura 23 – Curvas Sobrepostas da Onda Resultante e A-Frame e PLEM para o
Intervalo que Contém o Maior Vale (Detalhe)............................................................... 47
Figura 24 – Curvas de Carga Sobrepostas para o A-Frame e PLEM no Intervalo
Crítico que Contém o Maior Pico .................................................................................. 48
Figura 25 – Curvas de Carga Sobrepostas para o A-Frame e PLEM no Intervalo
Crítico que Contém o Maior Vale .................................................................................. 49
Figura 26 – Configuração Ideal do Método Compensado de Descida pela Popa do
Navio............................................................................................................................... 50
Figura 27 – Gráfico da Força da “Mola” Versus Deslocamento do CompensadorHidro-
Pneumático Passivo e a Reta Relativa à Tendência da Curva (Resultados da Equação-
4) ..................................................................................................................................... 52
Figura 28 – Gráfico da Força da “Mola” Versus Deslocamento do CompensadorHidro-
Pneumático Passivo para Diferente Valores de “k” ..................................................... 53
Figura 29 – Curvas de Deslocamento Sobrepostas do A-Frame e do PLEM
(Compensado e Não Compensado) para o Intervalo Crítico......................................... 55
Figura 30 – Curvas de Deslocamento Sobrepostas da Onda, A-Frame e PLEM
(Compensado e Não Compensado) para o Intervalo Mais Crítico (Detalhe) ............... 56
Figura 31 – Curvas de Carga Sobrepostas para o A-Frame e PLEM no Intervalo
Crítico que Contém o Maior Pico .................................................................................. 57

xi
Figura 32 – Curva de Resposta do Compensador de Heave ......................................... 58
Figura 33 – Representação do Sistema Cilindro-Reservatório ...................................... 61
Figura 34 – Curva da Rigidez do Gás em Relação ao Comprimento Inicial do
Reservatório ................................................................................................................... 63
Figura 35 – Curva da Rigidez do Gás em Relação ao Deslocamento e ao Comprimento
Inicial do Reservatório ................................................................................................... 64
Figura 36 – Curva da Dependência da Rigidez do Gás em Relação ao Deslocamento
Máximo de 1m, para L0 = 10m....................................................................................... 65
Figura 37 – Curva de Verificação da Linearização da Rigidez, para L0 = 10m. .......... 66
Figura 38 – Curva do Erro na Força Devido à Linearização da Rigidez do Gás, para
L0 = 10m. ........................................................................................................................ 66
Figura 39 – Curva da Dependência da Rigidez do Gás em Relação ao Deslocamento
Máximo de 1m, para L0 = 3m......................................................................................... 67
Figura 40 – Curva de Verificação da Linearização da Rigidez, para L0 = 3m. ............ 68
Figura 41 – Curva do Erro na Força Devido à Linearização da Rigidez do Gás, para
L0 = 3m. .......................................................................................................................... 68

1
1 INTRODUÇÃO
O petróleo é a principal fonte energética da civilização atual, garantindo
relevância política e econômica aos países que o possuem em grandes reservas. Parte
delas encontra-se no mar, muitas vezes afastada da costa e em grandes profundidades.
Vultosas somas de recursos, aliadas ao grande desenvolvimento tecnológico, permitem
a exploração em alto-mar, graças à importância e altos preços do petróleo no âmbito
mundial. No Brasil, por exemplo, 91% das reservas de petróleo são marítimas (dados de
1999), sendo quase a totalidade concentrada na Bacia de Campos, Estado do Rio de
Janeiro [1].
A exploração dos poços marítimos iniciou-se no final século XIX, sendo as
primeiras instalações feitas na costa da Califórnia e no Mar Cáspio. Constituíam-se de
estruturas fixas conectadas à costa, sobre as quais suportavam-se os equipamentos para
a perfuração e exploração dos poços. A profundidade alcançava no máximo 6m [1].
No Brasil, a exploração de petróleo é tarefa muito complexa, não só pela
extensão de nossa área sedimentar, superior a seis milhões de quilômetros quadrados,
como pela natureza das bacias, que possuem um tipo de rocha de difícil exploração e
com pouco petróleo. No mar, a dificuldade se mede pela profundidade da água em que
se encontram as maiores reservas, localizadas de 200 a 2 mil metros [1].
O Brasil possui 35 bacias sedimentares principais, que se distribuem por mais
de 6,4 milhões de quilômetros quadrados, sendo 4,9 milhões de quilômetros quadrados
em terra e 1,5 milhão de quilômetros quadrados na plataforma continental, até a lâmina
d'água de três mil metros. Destas, 19 são exclusivamente terrestres, sete são
exclusivamente marítimas e as outras nove restantes são bacias costeiras, que se

2
estendem de terra para a plataforma continental. Apesar dessa extensa área sedimentar e
do grande número de bacias, 70% delas não registram descobertas de óleo ou gás em
quantidades comerciais [1].
No final da década de 60, o grande destaque foi a primeira descoberta de
petróleo no mar, em lâmina d'água de 30 metros (Campo de Guaricema) no litoral de
Sergipe. Depois de Guaricema, foram intensificadas as campanhas exploratórias na
plataforma continental brasileira e foram realizadas várias descobertas de petróleo no
litoral de vários estados. Na década de 70, o fato mais importante na área de exploração
e produção foi a descoberta do campo de Garoupa (1974), na Bacia de Campos, no
litoral do Estado do Rio de Janeiro, em lâmina d'água de 124 metros Já nos anos 80, as
descobertas de campos gigantes de petróleo na região de águas profundas
transformaram a Bacia de Campos na mais importante área produtora brasileira.
Enquanto avança o desenvolvimento de tecnologia de exploração de petróleo
no fundo do mar, a necessidade de proporcionar metodologias mais confiáveis para as
construções submarinas aumenta.
Em conformidade com a demanda de mercado, para a instalação de manifolds,
estacas de sucção, módulos de conexão remota em profundidades cada vez maiores, as
empresas de construção submarina encontram diversos limitantes para a utilização do
sistema tradicional sem compensação do efeito das ondas na embarcação de instalação
(não compensado). Os fenômenos normalmente encontrados são [2]:
• Aumento significativo da amplificação dinâmica oriunda da resposta das
embarcações aos movimentos das ondas, que promove necessidade de cabos de aço
mais robustos, materiais para içamento de carga de maior capacidade, maior risco

3
associado às operações, aumento do tempo de execução de obras devido à condição de
mar;
• Dificuldade de intervenção por ROV (Veículo de Operação Remota) em
equipamentos à meia-água, uma vez que as variações de posição podem possuir grande
amplitude, sob pena de dano nos ROV’s e conseqüente atraso nas operações;
• Situação instável quando um equipamento, pousado no leito marinho,
necessita de reposicionamento, sob pena de choque do equipamento no fundo ou em
equipamentos adjacentes;
• Impossibilidade de efetuar conexões verticais cujos encaixes são
delicados, tais equipamentos podem colidir com suas bases causando danos irreparáveis,
podendo inviabilizar um projeto.
Um sistema de compensação do heave aplicado numa determinada obra poderá
proporcionar uma operação em condições de mar mais severas, ou efetuar instalações e
acoplamentos de equipamentos, em grandes profundidades, com maior precisão e
controle, ou seja, com aumento significativo de produtividade e confiabilidade.

4
1.1 A ORGANIZAÇÃO DO TEXTO
O presente trabalho foi organizado de forma a expor as contribuições
realizadas, identificando alguns detalhes práticos na instalação de equipamentos no
fundo do mar e propondo uma saída viável para minimização de algumas dificuldades
normalmente encontradas nas operações de instalação e intervenção submarina.
No capítulo 2, os principais equipamentos utilizados para compor o arranjo
submarino de um campo são mostrados, informando dados relevantes de grandezas
como dimensões, peso e eventualmente o custo do equipamento, promovendo uma idéia
acerca do nível de dificuldade e habilidade que as operações requerem.
O capítulo 3 apresenta os princípios básicos de compensação de heave e a
comparação entre os métodos. Comenta, também, os diversos estudos e
desenvolvimentos realizados atualmente.
No capítulo 4 são mostrados os fundamentos e princípios do modelo
matemático utilizado, apresentando os limites e condições para uma aplicação.
O capítulo 5 apresenta um estudo de caso. As propriedades e parâmetros do
sistema são definidos, comenta-se a simulação de um sistema não compensado e
desenvolve-se o modelo matemático proposto no item 4. Após o cálculo dos valores
necessários foi desenvolvida a simulação do sistema compensado, foram comentados os
resultados e foram evidenciadas as dificuldades encontradas na determinação dos
parâmetros requeridos.

5
O capítulo 6 apresenta as conclusões do trabalho resumindo os resultados
obtidos. Este item, também, comenta sobre possíveis desenvolvimentos que poderiam
ser realizados em trabalhos futuros.
Nos apêndices são apresentadas algumas teorias e conceitos básicos que foram
consideradas importantes para o leitor vislumbrar algumas passagens desenvolvidas
nesse trabalho.

6
2 A INSTALAÇÃO DE EQUIPAMENTOS SUBMARINOS
2.1 UMA VISÃO GERAL SOBRE INSTALAÇÃO SUBMARINA
Existe uma crescente tendência de instalação de equipamentos submarinos
através de cabo de aço ou linha flexível a partir de navio de posicionamento dinâmico,
mas pouco se tem investigado sobre a influência das variáveis que governam a dinâmica
destes sistemas, motivando assim a elaboração de alguns trabalhos nesta área. Tais
metodologias de instalação de equipamentos contrapõem-se à instalação através de
coluna de tubos de aço a partir de plataforma semi-submersível (também de
posicionamento dinâmico). A tendência tem explicação no avanço de explorações em
lâminas d’água cada vez mais profundas, na mudança de cultura de instalação imposta
pelo desenvolvimento tecnológico e principalmente pelo alto custo da taxa diária de
plataforma em função da sua escassez em nível mundial.
Com a descoberta e necessidade de exploração de campos de produção em
lâminas d’água inacessíveis ao mergulho comercial (> 320m), surgiram obstáculos
tecnológicos que tiveram que ser transpassados [2]. Além disso, à medida que novas
descobertas situavam-se em lâminas d’água cada vez maiores, as barreiras também
cresciam.
Entre outros obstáculos a serem superados, estava a substituição de plataformas
ancoradas por plataformas de posicionamento dinâmico. Isto implicou na mudança do
sistema de guia utilizado para conduzir os equipamentos da superfície até ao
equipamento instalado previamente para estabelecer a conexão entre eles. Até então era
utilizado o sistema de cabos-guia, onde eram conectados cabos de aço em uma base
instalada no leito marinho. Esses cabos eram estendidos até a superfície e conectados ao

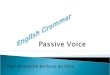
7
sistema de compensador de movimentos permitindo que eles ficassem submetidos à
tração constante, conforme figura 1.
Figura 1 – Exemplo de Instalação Através de Cabos-Guia
A utilização de plataformas semi-submersíveis com sistema DP inviabiliza o uso
de sistema de cabo-guia [2], pois no caso de uma perda de posição, a plataforma ficaria
ancorada no equipamento submarino e fatalmente causaria danos ao mesmo. Assim,
passou-se a utilizar funis com o objetivo de aumentar a área-alvo para assentamento e
encaixe do equipamento a ser instalado.
Para corrigir a orientação dos equipamentos a serem acoplados, isto é, corrigir o
aproamento do equipamento em instalação em relação ao equipamento já instalado no
fundo, passou-se a utilizar mecanismos de chavetas e rasgos helicoidais.
Originalmente as instalações de equipamentos submarinos em águas profundas
eram realizadas utilizando-se plataforma e coluna de tubos de aço (coluna de

8
perfuração) para descer e conduzir o equipamento até ao seu local de instalação [2]. Isto
é proveniente da cultura de instalação de Árvore de Natal Molhada (ANM) e seus
acessórios como capa de proteção, por exemplo. Até mesmo a conexão das linhas de
fluxo à ANM era realizada pela plataforma pelo método denominado de lay-away,
conforme figura 2. Nesta operação, as linhas de fluxo são enviadas do navio de
lançamento de linhas para a plataforma a fim de estabelecer a conexão das mesmas à
Árvore de Natal Molhada. As linhas ficam em configuração de catenária ligando a
plataforma ao navio que por sua vez fica aguardando até que a plataforma esteja
preparada para iniciar a descida da ANM. Então a ANM e as linhas são descidas
simultaneamente. Após a conexão da ANM à sua base no fundo do mar, o navio
prossegue o seu lançamento.
Figura 2 – Método de Instalação em Lay-Away
A necessidade de desenvolver campos de produção cujos arranjos submarinos
exigiam a conexão submarina da segunda extremidade sem auxílio de mergulhador, e
FUEUP
LINHA FLEXÍVEL
NAVIO DE INSTALAÇÃO

9
para aumentar a flexibilidade do planejamento das atividades dos navios de lançamento
de linhas, promoveu-se o desenvolvimento de um sistema de conexão alternativo de
linhas chamado de Sistema de Conexão Vertical.
O desenvolvimento do Sistema de Conexão Vertical possibilitou realizar
instalações de equipamentos utilizando-se cabo de aço a partir de lançamento de linhas,
o que foi comprovado através de testes de campo realizados em dezembro de 1994,
permitindo a sua utilização pioneira em janeiro de 1996 [2].
A instalação de equipamentos utilizando cabo de aço ou linha flexível tem a
vantagem de diminuir o tempo de descida do equipamento quando comparado com
coluna de tubos de aço [2], por se tratar de um condutor contínuo ao invés de seções de
tubos acoplados mecanicamente, além de poder utilizar navios de apoio ou de
lançamento de linhas, liberando-se as plataformas ou navios-sonda para operações
específicas para as quais foram projetados, tais como perfuração e completação.
Figura 3 – Método de Instalação com Sonda Versus Instalação com Navio de
Lançamento
X

10
A transição na mudança de filosofia de instalação com coluna a partir de
plataforma para cabo a partir de navio foi lenta e ocorreu em pequena faixa de lâmina
d’água entre 400m e 600m. Quando ocorreram os primeiros testes de instalação com
cabo a partir de navio DP, que poderia ser realizado por uma plataforma, em dezembro
de 1994 [2], a PETROBRAS já havia atingido a marca dos 1027m de lâmina d’água,
estabelecendo um novo recorde mundial de produção em águas profundas [2].
O desenvolvimento do Sistema de Conexão Vertical contou com diversos
testes de campo com a finalidade de aprimorar o procedimento operacional baseado na
experiência dos técnicos. Entretanto, não foram desenvolvidos estudos no sentido de se
obter uma visão panorâmica da influência dos fatores envolvidos, tais como
movimentos do navio em função da condição de mar, lâmina d’água, geometria do
equipamento e tipo do condutor (cabo ou linha flexível), que são de grande importância
para o dimensionamento de todo o sistema, assim como na especificação do navio a ser
utilizado. O enfoque em teste de campo ao invés de estudos analíticos, como simulações
numéricas, por exemplo, deve-se ao conhecimento de operações similares praticados
por um longo período em uma mesma faixa de lâminas d’água. Entretanto, com
descobertas de novos reservatórios localizados em lâminas d’água ultraprofundas,
podendo chegar até 2500m, tornou-se necessário o desenvolvimento de estudos nesta
área a fim de evitar surpresas durante as operações.

11
2.2 PRINCIPAIS MÉTODOS DE INSTALAÇÃO
Dentre os diversos tipos de equipamentos que compõem uma planta submarina
para escoamento de óleo e gás, é possível dividir preliminarmente em 5 grupos que
possuem metodologia de instalação semelhante (não considerando as conexões
horizontais nem tampouco instalação de estacas de ancoragem):
• Tipo 1 - equipamentos livres que descem por cabos de aço, conforme
figura 4, para serem pousados no leito marinho (ex: PLEM’s, manifolds);
Figura 4 – Esquema de Lançamento de um PLEM
• Tipo 2- equipamentos conectados a linhas flexíveis que descem por
cabos de aço, conforme figura 5, para serem pousados no leito marinho (ex: PLET’s;
Skid’s com mandris de linha de fluxo);

12
Figura 5 – Esquema de Lançamento de um Skid
• Tipo 3- equipamentos conectados a linhas flexíveis que descem
pendurados pela(s) linha(s), conforme figura 6, para serem pousados no leito marinho
(ex: Skid’s com mandris de linha de fluxo);
Figura 6 – Esquema de Lançamento de um Skid Suportado Pelas Linhas

13
• Tipo 4- equipamentos livres que descem por cabos de aço, conforme
figura 7, para conexão vertical (ex: módulos “choke” de controle);
Figura 7 – Esquema de Lançamento de um Módulo Choke para Conexão em
Manifold
• Tipo 5- equipamentos conectados a linhas flexíveis que descem por
cabos de aço, conforme figuras 8 e 9, para conexão vertical (ex: módulos de conexão
vertical - MCV’s).
Figura 8 – Esquema de Conexão em 1ª Extremidade

14
Figura 9 – Esquema de Conexão em 2ª Extremidade
• Tipo 6- equipamentos sustentados por linhas flexíveis para conexão
vertical, conforme figura 10 (ex: sistemas tipo “stab & ringe over”).
Figura 10 – Esquema de Conexão com Sustentação pelo Duto

15
3 SISTEMAS DE COMPENSAÇÃO DE HEAVE NA CONSTRUÇÃO SUBMARINA
Para o desenvolvimento de campos em águas profundas e ultraprofundas, a
instalação de equipamentos submarinos de forma segura e econômica é de vital
importância. As condições de mar apresentadas em nosso país ocasionam significantes
movimentos das embarcações de instalação, conforme figura 11. A partir destes
fenômenos, sistemas de compensação desses movimentos e variações de cargas por eles
geradas necessitam de estudo.
Figura 11 – Representação Simplificada dos Movimentos Gerados Durante
uma Operação de Instalação Submarina
Com o objetivo de evitar danos nos equipamentos, por cargas de impacto,
durante a aproximação do corpo suspenso para o seu alvo. Na prática, o mesmo é
NAVIO DE INSTALAÇÃO
SONDA
MOVIMENTO DO NAVIO
MOVIMENTO DO EQUIPAMENTO
ONDA
MOVIMENTO DA SONDA

16
mantido acima do local de assentamento a uma distância de segurança. Esta distância é
definida em função da amplitude máxima de resposta do movimento vertical, uma vez
que este movimento não é regular em função existirem ondas de períodos e amplitudes
diferentes atuando simultaneamente, causando um fenômeno conhecido por batimento.
É importante observar também que mesmo quando o corpo suspenso alcança a sua área-
alvo ele continua se movendo, ainda que o navio seja mantido na sua posição pelo
sistema DP. Nesta condição, o movimento horizontal é extremamente lento (períodos
em torno de 1 minuto) quando comparado com o movimento vertical (períodos menores
que 10 segundos) [2].
3.1 PRINCÍPIOS BÁSICOS DOS SISTEMAS DE COMPENSAÇÃO DE HEAVE
Em um sistema de compensação de heave, em inglês designado como “heave
compensator”, o termo heave embora designe o movimento de arfagem da embarcação
(vide apêndice 3) ele será utilizado para designar o movimento vertical do equipamento
que está sendo lançado. Esse movimento poderia ser de fato originado pelo movimento
de heave (arfagem) da embarcação, ou pelo roll (jogo), no caso de um equipamento
sendo lançado pelo bordo da embarcação ou até mesmo pelo pitch (caturro), no caso de
um equipamento sendo sustentado pela popa ou proa da embarcação de instalação.
No desenvolvimento de determinado sistema de compensação de heave o
projetista necessitará identificar as características principais do tipo de resposta que a
operação necessita ter, além das condições disponíveis, tanto de orçamento para a obra
quanto relativo à operacionalidade do sistema, uma vez que sistemas mais sofisticados,
embora possam obter respostas mais precisas, podem requerer maior acurácia de

17
equipamentos, por vezes desnecessária, e condicionamentos (salas refrigeradas
exclusivas, por exemplo) que às vezes não são possíveis devido ao espaço reduzido das
embarcações.
Muito embora os sistemas de compensação possam ser desenvolvidos desde
aplicações gerais até instalações bastante específicas [5]. Os tipos de compensadores
podem ser passivos, ativos e semi-ativos, e seus princípios básicos de funcionamento
são:
3.1.1 Sistemas Passivos
O princípio de operação do sistema passivo de compensação de heave é a
suportação do cabo que sustenta a carga por um sistema de “mola” pneumática que age
pela compressão e expansão de um pistão (figura 12) que por sua vez é conectado a um
reservatório hidro-pneumático (acumulador). Os movimentos combinados de arfagem e
caturro da embarcação, para cargas suspensas pela popa, ou de arfagem e rolagem para
as cargas lançadas de meia-nau, geram uma diferença de força no cabo de sustentação
devido aos efeitos inerciais e hidrodinâmicos sobre a carga suspensa que serão,
idealmente, absorvidos pelo sistema de compensação, isto é: a “mola” pneumática reage
à mudança de carga, o escoamento do fluido proveniente do tanque hidro-pneumático
em direção ao cilindro (e vice-versa) é responsável pelo amortecimento viscoso do
sistema, e a resistência do gás em ser comprimido ou expandido confere a rigidez do
sistema. O sistema é conhecido como passivo, pois apenas reage a variação da força no
cabo, tendendo a minimizá-la, sendo, portanto, a única variável percebida pelo

18
equipamento. O sistema passivo de compensação de onda geralmente transmite de 8 a
12 % da variação de carga de um sistema não compensado [5].
Figura 12 – Esquema do Compensador Passivo
3.1.2 Sistemas Ativos
O sistema de compensação ativo age diretamente na força de sustentação,
fornecendo uma resposta “imediata” a fim de neutralizar a variação da carga e
conseqüentemente de posição. Esse sistema trabalha, em geral, em paralelo com um
sistema passivo para minimizar a energia requerida de atuação, ou seja, um sistema
puramente ativo tende a ser apenas teórico. O equipamento de içamento fornece mais
cabo ou recolhe, continuamente, a partir de informações geradas por sensores de
movimento do barco (acelerômetros, taut wires...). Os sensores de movimento fornecem
dados de entrada para um computador que, então, regula o comprimento de cabo na
água de modo a compensar a variação de posição no navio de instalação. Para estes
sistemas, mais do que a força, a posição é a variável controlada.
GÁS
ÓLEO
ACUMULADOR

19
Um sistema ativo de compensação de heave pode proporcionar uma
variação da ordem de 1 a 2 % daquela obtida num sistema não compensado [5].
3.1.3 Sistemas Semi-Ativos
O sistema de compensação semi-ativo (figura 13) é uma combinação dos
sistemas passivo e ativo. Para sistemas semi-ativos, uma força hidráulica adicional
(sistema ativo) é aplicada ao sistema passivo para neutralizar perdas por atrito e
variações de pressão de ar a fim de manter a carga constante. A energia consumida para
esse sistema é mais baixa que a necessária para um sistema puramente ativo [5].
Figura 13 – Esquema do Compensador Semi-Ativo

20
3.1.4 Prós e Contras dos Sistemas Existentes
O sistema passivo tende a acumular energia em um sentido e liberar essa
energia armazenada no outro sentido, promovendo uma centralização natural do
sistema. O amortecimento natural nesse tipo de sistema também é importante para
assegurar estabilidade e existe em função do amortecimento viscoso. O sistema ativo,
por sua vez, recebe o sinal de sensores que informam instantaneamente os movimentos
da embarcação de lançamento, e compensa diretamente no sistema de içamento da
carga. Controles e sensores modernos permitem que os sistemas ativos de compensação
de heave sejam mais práticos que eram anteriormente, e mesmo nos sistemas mais
simples, a acurácia, a repetibilidade e a taxa de amostragem (velocidade) são
fundamentais para o bom funcionamento do sistema ativo [5].
O sistema passivo de compensação de heave é “autônomo”, requer
praticamente nenhum suporte externo, possui poucos componentes, os quais são
relativamente simples e de fácil manutenção. Por comparação, os sistemas semi-ativos e
ativos precisam de suporte externo, como computadores, sensores, sistema de aquisição
de dados, sistemas hidráulicos, motores e também requerem eventual intervenção
humana. Devido a essas dificuldades esses sistemas tornam-se caros e mais difíceis de
manter [5].

21
3.2 DESENVOLVIMENTOS RECENTES E O “ESTADO DA ARTE”
DALMAIJER et al. [3] desenvolveu um sistema de compensação de heave para
o navio de instalação submarina “Normand Progress”, utilizando seu próprio guincho e
A-frame. O princípio utilizado foi de um sistema ativo e passivo integrados num mesmo
cilindro, além de uma comparação para diferentes configurações, e foi simulado no
programa MOSIHS (aplicação do LINUX - “modelling and simulation of hydraulic
systems”). O sistema foi instalado no navio e proporcionou os resultados desejados.
DRISCOLL [4] comparou o desempenho de um sistema de compensação
passivo montado em navio e na gaiola de um sistema de ROV. Seu desenvolvimento
deu-se a partir de um modelo, baseado no método de elementos finitos, aplicado a
sistemas de ROV de águas profundas utilizando diferentes valores de rigidez e
amortecimento. Observou que o compensador de gaiola, montado no fundo do mar,
efetivamente elimina os picos de carga, contudo uma má escolha das características do
compensador de heave tenderia a exacerbar os problemas operacionais.
ADAMSON [5] comparou a movimentação de carga por diferentes
equipamentos (guinchos, polias flutuantes, A-frame etc), descrevendo os diversos
métodos e concepções, avaliando as dificuldades para adaptar um sistema compensado e
identificando quais equipamentos poderiam proporcionar uma resposta mais eficiente
quanto à compensação de heave.
SAGATUN et al. [7] sugeriu uma nova estratégia para controle de heave para
movimentação de carga a partir do conceito de sincronização de onda com o sistema de
içamento somado a um sistema convencional de compensação de heave. A
sincronização reduziu as forças hidrodinâmicas a partir da diminuição da velocidade

22
relativa entre a descida do equipamento e a liberação do cabo por parte do guindaste. A
partir de um modelo em escala reduzida de uma plataforma semi-submersível com um
guindaste foram conseguidos resultados significativos. Dependendo da taxa de liberação
do cabo e do estado de mar, os resultados indicaram uma redução no desvio padrão da
força no cabo maior que 50%.
BUCHNER et al. [9] desenvolveu um método numérico para instalação de
estruturas submarinas desde a superfície do mar até grandes profundidades, a partir do
método “Improved Volume Of Fluid”. Em sua conclusão relata relativo sucesso nos
valores simulados em modelo reduzido, todavia observa que picos de carga não
puderam ser justificados pelo seu modelo, requerendo maiores estudos.
KORDE [11] investigou um método para compensação de heave para colunas
de perfuração em embarcações excitadas por ondas irregulares. Efetuou simulações sob
condições específicas de operação utilizando modelos dinâmicos. Concluiu que o
método investigado para compensação de heave mostrou-se efetivo dentro de condições
de linearidade.
HOVER [12] desenvolveu um modelo e apresentou um algoritmo para uma
simulação no domínio do tempo para umbilicais (tethers) sob baixa força e com valores
de rigidez torcional e à flexão, desprezando valores de inércia e aplicando valores
arbitrários de deflexões. Conseguiu vislumbrar o comportamento de umbilicais durante
manobras complexas.
KORDE [13] investigou métodos de controle de corpos flutuantes para
excitações de baixa amplitude utilizando um conversor de energia de onda. Examinou
dois sistemas: um, cuja massa oscilante era montada no corpo flutuado e vibrava em
defasagem, anulando o movimento dos corpos; no outro sistema utilizou um sistema

23
amortecido com mola e amortecedor. Concluiu que, do ponto de vista de projeto, o
sistema massa-mola-amortecedor é uma melhor opção.
LUERK et al. [14] desenvolveu um método de cálculo de resposta de sistemas
(força e deslocamento) suportados por umbilicais (tethers) utilizando transformada
inversa de Fourier que proporcionou uma acurácia 20% melhor que sistemas
denominados como típicos. Observou que picos de carga não puderam ser previstos
nem calculados.
HUANG [15] efetuou uma análise de estabilidade para corpos sustentados por
cabos (por exemplo: ROVS). Baseou-se num modelo com um grau de liberdade. Em
seu modelo foi linearizado o amortecimento e o cabo foi considerado como uma mola
de rigidez bi-linear. A simulação numérica mostrou a transição de uma resposta
periódica até uma resposta caótica.
MORRISON et al. [16] desenvolveu um método para configuração de sistema
de intervenção submarina compensado, com um grau de liberdade. Esse método é hoje
amplamente utilizado para conexões submarinas, por serem utilizadas bóias para anular
o movimento vertical que tende a induzir movimento ao corpo imerso sustentado por
cabo. Na prática, tal operação se faz mais eficiente para valores baixos de carga (até 5
toneladas) pois a configuração de massames (rigging) utilizando bóias, na prática,
mostra-se muito suscetível aos efeitos de correnteza a partir da área vélica promovida
pelo volume dos flutuadores.
CERQUEIRA et al. [29] efetuou um estudo paramétrico para sistemas passivos
de compensação de heave para intervenções profundidades de até 3000 metros.

24
4 MODELO DO SISTEMA PASSIVO DE COMPENSAÇÃO DE HEAVE
4.1 MOTIVAÇÃO
Em determinados momentos as condições de mar induzem aos equipamentos
uma variação dinâmica da sua carga de sustentação. Estes equipamentos, conforme
comentado anteriormente, possuem uma vasta variedade de formatos, normalmente
bastante complexos, tornando maior, desta forma, a dificuldade em se prever os
movimentos e cargas de determinada operação. A aproximação para a avaliação destas
operações é baseada em simulações realizadas no domínio do tempo [4] a partir das
interações entre a embarcação de instalação e o equipamento a ser instalado. Como
nenhum modelo poderá aproximar com grande exatidão as cargas geradas durante a
passagem pela superfície do mar ou a massa hidrodinâmica adicionada e o arrasto que
age no equipamento submerso ou próximo ao leito marinho. Para determinar estas
cargas com maior acurácia, modelos de testes serão necessários.
Com o aumento da possibilidade do uso de instalações de equipamentos
submarinos utilizando-se cabo como meio de transporte, não só nas operações de
conexão de linhas de fluxo, como também de equipamentos submarinos tais como
manifolds, módulos de válvulas, capas de proteção, ferramentas de instalação e outros.
Assim, o estudo da dinâmica de corpos submersos suspensos por cabo, ou linha, tem
também a potencialidade de auxiliar outras áreas como na análise de risers de
perfuração, completação e produção, por exemplo, devido a sua similaridade [2].

25
A fim de diminuir a complexidade do sistema de lançamento, conforme
comentado no item 3.1.4, com a introdução de um sistema de compensação de heave, o
presente trabalho desenvolve as análises na premissa de utilizar um sistema passivo
devido a sua simplicidade se comparada com os demais sistemas. Adicionalmente, o seu
custo reduzido o tornam indicado para uma vasta gama de aplicações onde não seria
justificável o investimento em dispendiosos sistemas ativos.
O método apresentado foi desenvolvido para um estudo de estabilidade para
operações de ROV em águas ultraprofundas [4]. O método utilizado proporcionou a
quantificação de valores como a rigidez do sistema e o amortecimento necessário para
compensar o efeito para a operação quando a mesma não é compensada. Outra
informação importante foi a formulação, a partir dos movimentos e cargas geradas num
sistema não compensado, do volume de gás e de fluido necessários ao sistema,
fundamental para o projeto mecânico de todo o compensador.
4.2 MODELO MECÂNICO E NUMÉRICO DO SISTEMA
Numa primeira aproximação pode-se representar [6] o compensador de heave
como um sistema massa-mola-amortecedor, conforme figura 14, sujeito ao movimento
de um suporte. O suporte representa o movimento y(t) prescrito pela embarcação ao
sistema de lançamento em função das condições ambientais.

26
Figura 14 – Representação Elementar do Sistema
A equação que governa o movimento do equipamento é dada por [6]:
Considera-se para o modelo o valor de “m” correspondente à soma da massa da
carga suspensa no sistema de lançamento com a massa própria do cabo do guincho. A
carga adotada para a análise representa um equipamento submarino.
Conforme o item 3.1.3, observamos que a parte do cilindro que possui fluido
hidráulico é conectado a um sistema de volume constante. Quando ocorre um aumento
de força no cabo devido aos movimentos da embarcação com conseqüente aumento da
carga oriunda da inércia e forças hidrodinâmicas agindo sobre o corpo sustentado, o
sistema comprime o cilindro hidráulico, o fluido comprime o ar dentro do tanque hidro-
pneumático e então o cabo acumulado no compensador é liberado. Observa-se que a
eficiência do sistema de compensação depende da relação entre o número de voltas de
cabo no sistema de compensação e o comprimento de cabo liberado. Quando o
(1)ou então:

27
movimento do barco é descendente a carga é aliviada, e o ar expande dentro do tanque
hidro-pneumático e todo o movimento é repetido no sentido inverso. O fluxo de óleo
que sai do cilindro hidráulico em direção ao acumulador é o principal responsável pelo
amortecimento do sistema. O ar dentro do acumulador é responsável pela rigidez do
sistema. Com isso têm-se dois benefícios: redução da movimentação da carga suportada
e da carga dinâmica (inércia e forças hidrodinâmicas).
A curva de força-deslocamento para o acumulador hidro-pneumático é
determinada pelo modelamento da compressão e expansão [4] do gás. Dessa maneira
[3], a relação termodinâmica que rege a compressão e expansão da “mola” pneumática,
considerando o gás ideal é:
Onde P é a pressão, V é o volume do gás dentro do acumulador e n é a razão do calor
específico do gás (1,4 para o ar respirável). Um acumulador é usado para aumentar o
volume do sistema a fim de se obter as características força-deslocamento necessárias
ao sistema hidro-pneumático. O volume do acumulador é determinado [4] a partir da
variação de força do compensador. Se uma força média é igual ao peso suportado, W, e
a máxima força é W ± kW, sendo k é uma fração especificada de W. Então, a partir de
(2), o volume do acumulador será:
PVn=constante (2)
VR=
111
1
−
−+ n
TP
kka
A δ (3)

28
Onde AP é a área do pistão, a é o número de voltas no cabo do compensador e δT é o
comprimento extra de cabo necessário. A relação não linear da força (tração) no
compensador é dada por:
Onde a primeira parcela é relativa à rigidez do sistema e a segunda parcela é
responsável pelo amortecimento viscoso do sistema, THC é a força no cabo de
sustentação do compensador, δ é o comprimento de cabo pago, Cpd é o fator de
amortecimento e δ´ representa a derivada de δ com respeito ao tempo. É importante
ressaltar que a curva força-deslocamento, primeira parcela de (4), é independente do
número de voltas do cabo no compensador, “a”.
É importante observar que a força na haste do cilindro e, portanto, a pressão no
gás depende do número de voltas que o cabo faz nas polias do compensador, conforme
figura 12. Assim, quanto menor for o curso do compensador de heave, ou seja, maior
número de voltas do cabo, maior será a pressão do sistema, e vice-versa. Esses fatores
serão importantes para o dimensionamento do sistema.
Para a simulação, foi considerado preliminarmente um método não
compensado de descida de dado equipamento, durante uma determinada condição de
severidade de mar para uma dada embarcação (conseqüentemente seu RAO), que
através do programa ORCAFLEX consegue-se chegar nas curvas de força e
deslocamento oriundas da amplificação dinâmica aplicável ao sistema.
THC= ( )
'
111
11
δ
δδ
δδ
pdn
TT
n
T C
kk
kW+
+
−
−+
+ (4)

29
O cabo de sustentação foi conectado ao navio (A-frame) e seu movimento,
portanto foi prescrito. O peso do equipamento foi modelado no programa ORCAFLEX
como sendo o sólido envolvente de um PLEM, conectado ao final do cabo de
sustentação, sujeito a forças gravitacionais e massa adicionada, maiores detalhes serão
apresentados no item 5.1.
4.3 HIPÓTESES E FRONTEIRAS DO MODELO
A análise parte da premissa que a amplitude máxima do perfil de onda no
espectro JONSWAP (vide apêndice A2) gerado pelo programa ORCAFLEX para um
ano de recorrência é a condição na qual a instalação deverá ser efetuada.
A massa adicionada oriunda do movimento vertical do cabo será igual a zero
[4], e considera-se que o equipamento se movimentará apenas na vertical.
O período e amplitude dos movimentos de um corpo suspenso próximo ao leito
marinho são função dos movimentos do navio na superfície, das propriedades do cabo
(rigidez axial, diâmetro e peso).
Considera-se o sistema de posicionamento dinâmico do navio de instalação
idealmente perfeito.
Não foi considerado o efeito de correnteza, conseqüentemente não foi
evidenciado efeito de vibração induzido por vórtice nas simulações dinâmicas. Os
movimentos horizontais que ocorrem durante a instalação de equipamentos submarinos
não foram considerados, uma vez que seu período é da ordem de 1 minuto e o

30
movimento vertical é da ordem de 10 segundos. Na prática o movimento horizontal do
equipamento não tende a ser fator que dificulte a operação.
Foi considerado o navio de instalação aproado de acordo com a incidência das
ondas, isto é, desconsiderando que o navio esteja recebendo as ondas de través e sim
pela proa, uma vez que na prática esta é a condição ideal para realização de uma obra
submarina.
O tempo necessário para o desenvolvimento das simulações foi limitado a
aproximadamente 12 horas, a partir de uma análise de sensibilidade, com uso de um
computador com processador Pentium 4, com velocidade de 1800GHz e 248 Mb de
memória RAM, a fim de tornar exeqüível a realização de todas as análises necessárias
para o desenvolvimento do trabalho.
Não foram considerados os atritos internos do sistema de compensação, bem
como os valores de atrito entre o cabo e as polias.

31
5 ESTUDO DE CASO
5.1 CENÁRIO
Considera-se o lançamento de um PLEM por um navio de instalação. O cabo
acumulado no guincho tem sua trajetória modificada por uma polia que faz com que o
mesmo suba em direção à polia do A-frame e desça verticalmente até o ponto de
sustentação do PLEM, conforme a figura 15.
Figura 15 – Configuração do Método Não-Compensado de Descida pela Popa
do Navio
A-FRAME
GUINCHO
PLEM
CABO DE AÇO
MOVIMENTO A-FRAME EM FUNÇÃO DO RAO DO NAVIO
ONDA RESULTANTE
MOVIMENTO DO PLEM EMFUNÇÃO DA ELASTICIDADE
DO CABO

32
5.2 PARÂMETROS DO MODELO
Os parâmetros do modelo são de fundamental importância, pois identificam as
fronteiras para as quais o método foi verificado e fornecem as circunvizinhanças para as
quais futuros estudos poderão ser dirigidos.
5.2.1 Parâmetros para Espectro de Onda
Para o desenvolvimento do trabalho foram utilizados parâmetros para um
modelo de espectro de ondas em JONSWAP, considerando o lançamento sendo
desenvolvido na Bacia de Campos [21].
A formulação de JONSWAP baseia-se em uma extensiva coleta de dados de
ondas do programa Joint North Sea Wave Project, realizado entre 1968 e 1969 [21]. O
espectro representa mares com limitação de pista, e os dados de entrada são a
velocidade do vento e o comprimento da pista. A formulação original é a seguinte:
42
4 5
2
2 2
5( ) exp , (2.18)(2 ) 4
( - )exp - ,
2
dJONSWAP
p
p
p
g fS ff f
f fd
f
α γπ
σ
− = −
=
onde γ é conhecido como o parâmetro de forma do pico e o termo dγ é
conhecido como fator de aprimoramento de pico.

33
5.2.1.1 Dados de Entrada do Espectro de Onda no Programa Orcaflex
Os valores processados pelo programa ORCAFLEX são: “Hs” - a altura
significativa da onda; “Tz” - o período de cruzamento com o zero, e “Tp” e “fm”, que são
o período espectral e a freqüência do pico, isto é, os de maior energia espectral.
O fator de aprimoramento de pico foi calculado automaticamente pelo
programa.
“σ1” e “σ2” são parâmetros de largura espectral e são fornecidos pelo
programa com os valores 0,07 e 0,09; respectivamente.
“α” é o parâmetro de energia espectral e é calculado pelo programa para
encontra um estado de mar com o “Hs” e “Tz” fornecidos.
Para o espectro JONSWAP existem as seguintes opções para ajuste dos
parâmetros:
• Automático: especifica-se “Hs” e “Tz” e o programa calcula os outros
parâmetros;
• Parcialmente Especificado: especifica-se “Hs”, “Tz” (ou “Tp”, “fm”) e
“γ ”, e o programa calcula os outros parâmetros;
• Completamente Especificado: especifica-se todos os parâmetros
espectrais e o programa calcula “Ks” e “Tz”.
Na tabela 1 são apresentados os valores característicos para os parâmetros em
um espectro de ondas JONSWAP com dados coletados na Bacia de Campos [21]. A

34
direção de incidência adotada considera a condição mais severa e que ocorre maior
freqüência [21].
Tabela 1 – Parâmetros de Onda Característicos por Período de Retorno
Período de Retorno (anos) DIREÇÃO PARÂMETRO
1 10 30 50 100
Hmax : altura máxima de onda [m] 10,7 12,7 13,6 14,0 14,6
THmax: período associado à Hmax [s] 12,0 12,1 12,2 12,2 12,2
Hs : altura de onda significativa [m] 5,7 6,9 7,3 7,5 7,8
Tp: período de pico associado à Hs [s] 13,7 14,62 14,94 15,1 15,35
Tz : período de cruzamento com o “zero” [s] 10,3 10,99 11,23 11,35 11,54
“α” - alfa 0,0041 0,0046 0,0047 0,0047 0,0047
S
U
D
O
E
S
T
E “γ” - gama 1,55 1,61 1,63 1,64 1,70
5.2.2 Propriedades do Cabo do Guincho
Como elemento principal para o sistema de içamento de carga, para a tarefa em
questão, tem-se um guincho hidráulico com capacidade para 42 toneladas. No guincho
tem-se o cabo com as seguintes características:
a) Diâmetro externo: 52 mm
b) Peso do cabo no ar: 11 kg/m
c) Deformação longitudinal do cabo de aço:

35
Existem dois tipos de deformação longitudinal nos cabos de aço, ou seja: a
estrutural e a elástica. [19].
c.i) Deformação estrutural
A deformação estrutural é permanente e começa logo que é aplicada uma carga
no cabo. É motivada pelo ajustamento dos arames nas pernas do cabo e pelo
acomodamento das pernas em relação à alma do mesmo.
A maior parte da deformação estrutural ocorre nos primeiro dias ou semanas de
serviço do cabo de aço, dependendo da carga aplicada. Nos cabos comuns, o seu valor
pode ser aproximadamente 0,50% a 0,75% do comprimento do cabo de aço sob carga.
c.i.i) Tipos de alma
A alma de um cabo de aço é um núcleo do qual as pernas são torcidas e ficam
dispostas em forma de hélice. Sua função principal é fazer com que as pernas sejam
posicionadas de tal forma que o esforço aplicado no cabo de aço seja distribuído
uniformemente entre elas. A alma pode ser constituída de fibra natural ou artificial,
podendo ainda ser formada por uma perna ou por um cabo de aço independente.
Os cabos com almas de aço, conforme figura 16, garantem maior flexibilidade
ao amassamento e aumentam a resistência à tração. A alma de aço pode ser formada por
uma perna de cabo (AA) ou por um cabo de aço independente (AACI), sendo esta
última modalidade preferida quando se exige do cabo maior flexibilidade, combinada
com alta resistência à tração.

36
Figura 16 – Cabo com Alma de Aço
c.i.ii) Pré-esticamento
A deformação estrutural pode ser quase totalmente removida por um pré-
esticamento do cabo de aço. A operação de pré-esticamento é feita por um processo
especial e com uma carga que deve ser maior que a carga de trabalho do cabo, e inferior
à carga correspondente ao limite elástico do mesmo.
c.ii) Deformação elástica
A deformação elástica é diretamente proporcional à carga aplicada e ao
comprimento do cabo de aço, e inversamente proporcional ao seu módulo de
elasticidade e área metálica.
mAELPL
..
=∆ , onde:
∆L = deformação elástica
P = carga aplicada

37
L = comprimento do cabo
E = módulo de elasticidade
Am = área metálica (mm2)
2.dFAm =
F = fator de multiplicação que varia em função da construção do cabo de aço
d = diâmetro nominal do cabo de aço ou da cordoalha (mm)
Construção do cabo de aço: 6 x 37 W → F = 0,391 [19]
c.ii.i) Módulos de elasticidade de cabos de aço
O módulo de elasticidade de um cabo de aço aumenta durante a vida do mesmo
em serviço, dependendo da sua construção e condições sob as quais é operado, como
intensidade de cargas aplicadas, cargas constantes ou variáveis, dobras e vibrações às
quais o mesmo é submetido, todavia o valor nominal do módulo de elasticidade será
utilizado.
Cabos de aço com alma de aço: 6 x 37 → E = 9500 a 10500 kgf/mm2 [19]
c.ii.ii) Rigidez do cabo
E = 10000 x 1.2 = 12000 kgf/mm2 = 117720 N/mm2
2... dFEAEk m == = 124461 kN

38
5.2.3 Propriedades da Embarcação de Instalação
A resposta de cada embarcação a um determinado estímulo (onda) é modelada
de acordo com o seu RAO. O RAO indica a resposta em amplitude e fase a estímulos
padrão recebidos por diferentes direções, de 0° a 180°. A conjunção dessas respostas
configura a resposta do navio às ondas, funcionando como função de transferência entre
eles.
Normalmente os RAO's são calculados por firmas especializadas. Porém, o
Orcaflex possui um algoritmo que gera um RAO para uma embarcação, uma vez
fornecido o comprimento da mesma. Em nosso caso o comprimento utilizado foi de
120m, comprimento típico para uma embarcação de instalação submarina.
5.2.4 Propriedades do PLEM
O equipamento submarino utilizado nesse estudo chama-se Pipeline End
Manifold (PLEM). Este equipamento é utilizado em terminações de tubulações flexíveis
e redistribui o fluxo para outras tubulações.
No presente estudo, o PLEM foi modelado como uma bóia 6D, ou seja, uma
bóia com 6 graus de liberdade: 3 de translação e 3 de rotação. As forças que agem sobre
uma bóia 6D são empuxo, massa adicionada, amortecimento e arrasto, além das forças
transmitidas pelo cabo. Seu peso foi estimado em 20 toneladas, e seu formato
aproximado ao de um equipamento real.

39
Para se modelar uma bóia 6D, deve-se fornecer diversos coeficientes ao
programa para que ele efetue os cálculos adequadamente:
Amortecimento: Forças e momentos de amortecimento hidrodinâmicos são
aplicados à bóia. Essas cargas são diretamente proporcionais à velocidade relativa ou
angular do mar passando pela bóia. Para cada direção dos eixos locais da bóia, deve-se
especificar o valor da força unitária para quando a velocidade relativa é 1 unidade de
distância/segundo. O programa então escalona as magnitudes de acordo com a
velocidade relativa real e aplica as forças e/ou momentos resultantes. Pode-se também
especificar o Momento Unitário aplicado quando a velocidade angular relativa é 1
radiano/segundo.
Arrasto: Forças e Momentos de arrasto hidrodinâmicos são aplicadas à bóia.
Essas cargas são proporcionais ao quadrado da velocidade relativa, ou velocidade
angular, do mar passando pela bóia. As propriedades de força de arrasto são
especificadas fornecendo-se, para a direção de cada eixo local da bóia, a área sujeita ao
arrasto nessa direção, e o correspondente coeficiente de arrasto. Os momentos de arrasto
são calculados de forma semelhante, porém ao invés de uma área de arrasto, deve-se
especificar o Momento de Área. Foi utilizado o valor de 1,2 para todos os coeficientes
de arrasto, uma vez que este tipo de equipamento é construido por estruturas tubulares.
Inércia do Fluido: As propriedades de inércia do fluido são proporcionais à
aceleração do próprio fluido e da bóia. Essas acelerações têm dois efeitos principais:
primeiramente elas resultam em forças e momentos aplicados à bóia. Segundo, a bóia
experimenta um aumento na sua inércia, chamado de Massa Adicionada. As
propriedades fluidas inerciais da bóia são especificadas para a direção de cada eixo local

40
da bóia, fornecendo-se uma Massa Hidrodinâmica de referência, bem como os dois
coeficientes de inércia, Ca e Cm.
O Ca determina a quantidade de massa adicionada à bóia naquela direção. Ela é
igual a Ca vezes a Massa Hidrodinâmica para aquela direção.
O Cm determina a força de aceleração fluida que é aplicada em determinada
direção. Essa força é igual a F = Cm x Massa Hidrodinâmica x Af, onde Af é a
componente naquela direção da aceleração do fluido na bóia.
O cálculo de acelerações rotacionais é similar, porém ao invés de se fornecer
uma massa de referência, deve-se fornecer um momento de inércia de referência.
Para o presente trabalho o valor de Ca foi considerado como sendo igual a 1
assim como o valor de Cm. Estes valores são os usuais (práticos) adotados quando não
se têm dados experimentais ou de modelos mais refinados como o de mecânica dos
fluidos computacional.

41
5.3 DESCRIÇÃO DA APLICAÇÃO DO MODELO
Esse item demonstra a aplicação do modelo conforme descrito no capítulo 4.
5.3.1 Identificação da Condição Crítica de Mar
Inicialmente foi plotado o perfil de onda para condição anual (31536000
segundos) informada pelo programa ORCAFLEX para o espectro JONSWAP (figura
17).
Figura 17 – Altura de Onda (m) em Função do Tempo (s) em 1 Ano
-5
-4
-3
-2
-1
0
1
2
3
4
5
0 5000000 10000000 15000000 20000000 25000000 30000000
Tempo (s)
Am
plitu
de (m
)

42
Observando o gráfico, oriundo de uma tabela com valores fornecidos pelo
programa ORCAFLEX, foi observado que o maior pico de onda acontece aos 14773621
segundos cuja altura de onda é igual a +3,94 m, e o maior vale ocorre aos 8554810
segundos cuja altura de onda é igual a -4,21 m. Partindo da premissa informada no item
4.3, foi plotado outro perfil de onda para 1000 segundos nos intervalos que contém o
ponto de maior pico de onda e de maior vale. A necessidade de plotar novo gráfico é
importante pois o incrermento de tempo para obtenção dos valores de amostragem
promove erros que são desprezíveis na condição anual e que todavia são relevantes se
forem tomados como amostras os 1000 segundos mais críticos. No período anual o
incremento é de 100,1 segundos, enquanto que para o período crítico é de 0,1 segundos.
Para os 1000s que contém o maior pico, foram extraídos os seguintes
resultados mostrados na figura 18:
Figura 18 – Perfil de Onda na Região de Maior Pico
-6
-5
-4
-3
-2
-1
0
1
2
3
4
5
6
14773000 14773100 14773200 14773300 14773400 14773500 14773600 14773700 14773800 14773900 14774000
tempo (s)
Am
plitu
de (m
)

43
Conforme mostra a figura 18, a condição mais crítica encontra-se aos
14773190 segundos com +5,08 m de altura de onda.
Para os 1000s que contém o maior vale, foram extraídos os seguintes
resultados mostrados na figura 19:
Figura 19 – Perfil de Onda na Região de Maior Vale
Conforme mostra a figura 19, o vale mais crítico encontra-se aos 8554810
segundos com -4,21 m de altura de onda.
5.3.2 Simulação Dinâmica Não-Compensada
Após a entrada dos dados do item 5.2 foi simulado para uma profundidade de
1200m considerando o lançamento conforme cenário mostrado no item 5.1. O tempo de
análise foi realizado nos intervalos mostrados nas figuras 18 e 19 com o objetivo de
-5
-4
-3
-2
-1
0
1
2
3
4
5
8554000 8554100 8554200 8554300 8554400 8554500 8554600 8554700 8554800 8554900 8555000
Tempo (s)
Ond
a (m
)

44
conseguir efetivamente o intervalo que contém a maior altura de onda e
conseqüentemente as maiores amplitudes de movimento. Os demais picos de onda se
mostram comuns para todo o intervalo de tempo plotado na condição anual e com isso,
caso uma onda que não seja a de maior intensidade se mostrar crítica, seu efeito será
mostrado na análise não compensada. O intervalo de 1000 s foi escolhido, pois é cerca
de 100 vezes maior que o período médio de onda (conforme tabela 1) e com esse valor
foi possível obter valores mais significativos.
Na figura 20 são mostrados os resultados da simulação não-compensada
durante o intervalo de 14773000 a 14774000 segundos. Os gráficos sobrepostos
fornecem a variação do movimento da popa do navio e do perfil de onda.
Figura 20 – Curvas Sobrepostas da Onda e A-Frame para o Intervalo que
Contém o Maior Pico de Onda
-14
-12
-10
-8
-6
-4
-2
0
2
4
6
8
10
12
14
0 100 200 300 400 500 600 700 800 900 1000
Tempo (s)
Am
plitu
de (m
)
Onda A-frame

45
Expandindo-se o intervalo que possui a variação de maior amplitude (21,21 m)
que ocorre entre 750 s e 780 s é possível obter o gráfico conforme figura 21:
Figura 21 – Curvas Sobrepostas da Onda e A-Frame e PLEM para o Intervalo
que Contém o Maior Pico de Onda (Detalhe)
Conforme o detalhamento acima, figura 21, a inserção da posição do PLEM em
comparação com o movimento do A-frame identifica o efeito da elasticidade do cabo de
sustentação na movimentação do equipamento.
Na figura 22, são mostrados os resultados da simulação não-compensada
durante o intervalo de 8554000 a 8555000 segundos (variação de 1000 segundos), no
qual encontra-se a região de maior vale. Os gráficos sobrepostos que fornecem a
variação do movimento da popa do navio e do perfil de onda.
-14
-12
-10
-8
-6
-4
-2
0
2
4
6
8
10
12
14
750 760 770 780 790 800
Tempo (s)
Am
plitu
de (m
)
PLEM Onda A-frame

46
Figura 22 – Curvas Sobrepostas da Onda e A-Frame para o Intervalo que
Contém o Maior Vale
Para o intervalo acima foi possível observar uma amplitude de movimento do
A-Frame de 18,15 m que ocorreu entre o intervalo de tempo de 183,79 s e 189,90 s da
simulação.
A figura 23 expande o intervalo de 150 s até 200 s contidos no intervalo total
de 1000 s da simulação não compensada para que possam ser vislumbrados os efeitos da
excitação promovida pela onda na embarcação (A-frame) e no PLEM.
-12
-10
-8
-6
-4
-2
0
2
4
6
8
10
12
0 100 200 300 400 500 600 700 800 900 1000
Tempo (s)
Am
plitu
de (m
)
A-frame Onda

47
Figura 23 – Curvas Sobrepostas da Onda Resultante e A-Frame e PLEM para
o Intervalo que Contém o Maior Vale (Detalhe)
Efetuando a observação relativa à variação de carga, oriunda dos movimentos
durante o intervalo que contém o maior pico de onda, foram extraídos da simulação e
unificados os gráficos de tração no domínio do tempo conforme a figura 24.
-12
-10
-8
-6
-4
-2
0
2
4
6
8
10
12
150 155 160 165 170 175 180 185 190 195 200
Tempo (s)
Am
plitu
de (m
)
PLEM Onda A-frame

48
Figura 24 – Curvas de Carga Sobrepostas para o A-Frame e PLEM no
Intervalo Crítico que Contém o Maior Pico
Tem-se da figura 24 que a variação de carga no A-frame faz com que o projeto
de instalação do equipamento submarino seja dimensionado para as cargas máximas,
nesse caso seria necessária a utilização de um guincho de capacidade de pelo menos 62
toneladas, enquanto a carga média seria da ordem de 33 toneladas. Considerando a
carga do PLEM na extremidade do cabo, o arranjo de peças (massames) para o
içamento da carga teria que ser apropriado para 44 toneladas, enquanto sua carga média
é de 20 toneladas. A experiência mostra que a previsão de equipamentos para grandes
cargas torna o projeto mais caro, além de diminuir significativamente a
operacionalidade. O valor máximo para o Fator de amplificação dinâmica para a este
intervalo foi de 1,88.
0
50
100
150
200
250
300
350
400
450
500
550
600
650
750 755 760 765 770 775 780 785 790 795 800
Tempo (s)
Traç
ão (k
N)
A-frame PLEM

49
Observando a variação de carga durante o intervalo que contém o maior vale
(onda), oriunda dos movimentos, foram extraídos da simulação e unificados os gráficos
de força (tração) no domínio do tempo conforme a figura 25 abaixo.
Figura 25 – Curvas de Carga Sobrepostas para o A-Frame e PLEM no
Intervalo Crítico que Contém o Maior Vale
Observa-se, na figura 25, que a variação de carga do PLEM faz com que o
projeto de instalação do equipamento submarino seja dimensionado para as cargas
máximas para o intervalo de onda que contém o maior vale, nesse caso seria necessária
à utilização de um guincho de capacidade de pelo menos 50 toneladas, lembrando que a
carga média seria da ordem de 33 toneladas. Considerando o PLEM, o arranjo de
massames para a sua movimentação teria que ser apropriado para 35 toneladas,
enquanto sua carga estática é de 20 toneladas. O valor máximo para o Fator de
amplificação dinâmica neste intervalo foi de 1,79.
0
50
100
150
200
250
300
350
400
450
500
550
150 160 170 180 190 200
Tempo (s)
Traç
ão (k
N)
A-frame PLEM

50
5.3.3 Estudo de Valores para Aplicação na Simulação Compensada
A partir da análise não compensada, é possível chegar aos valores máximos de
tração no cabo de sustentação e de amplitude de movimento requeridos pelo modelo
apresentado no item 4 a fim de que seja possível calcular os valores de rigidez e
amortecimento necessários para o desenvolvimento de um sistema compensado.
O modelo não compensado, conforme figura 14, é modificado a partir da
inclusão do compensador de heave no sistema, conforme a figura 26:
Figura 26 – Configuração Ideal do Método Compensado de Descida pela
Popa do Navio
GUINCHO
ONDA RESULTANTE
A-FRAME
COMPENSADOR DE HEAVE
PLEM
CABO DE AÇO
MOVIMENTO A-FRAME EM FUNÇÃO DO RAO DO NAVIO
PLEM ESTÁTICOEM FUNÇÃO DA ATUAÇÃO
DO COMPENSADOR
0
0 -x+x
+x
-x
0
MOVIMENTO DO COMPENSADOR EM FUNÇÃO DA VARIAÇÃO DE CARGA

51
Conforme é possível observar no item 5.3.2, a partir das simulações não
compensadas para os intervalos que contém o maior pico de onda anual e o maior vale,
o intervalo que contém o maior pico de onda dentro da condição anual, mostrado na
figura 17 e posteriormente detalhado na figura 18, possui a condição mais crítica, isto é,
possui os maiores valores de amplitude de movimento e maior valor de aumento de
carga devido aos efeitos hidrodinâmicos e inerciais que agem sobre o PLEM. Assim
sendo, a partir deste momento foi realizado o estudo de compensação para a condição
mais crítica.
5.3.3.1 Determinação do Valor de Rigidez e Amortecimento
Conforme [4], a inclinação da curva do gráfico (THC/ WT) x (δ/δT) determina a
rigidez do sistema.
Primeiramente, com base no item 3.1.1, é possível atribuir, uma vez que o
sistema passivo de compensação de onda geralmente transmite de 8 a 12 % da variação
de carga de um sistema não compensado [5], uma variação de 10% para a transmissão
da carga compensada. Para tal valor, após a análise dinâmica poderá ser possível efetuar
uma análise de sensibilidade a fim de avaliar a escolha do valor.
Para o desenvolvimento da equação (4), considerando a variação de 10%
chega-se ao primeiro valor necessário (k=0,1), descrito no item 4.2.
Calculando valores de THC a partir de (4), interativamente, para variações de
δ/δT de 0.05 até 0.95, isto é, possibilitando o compensador de heave atuar por quase a
totalidade do curso do pistão (até a iminência de choque devido ao final de curso),

52
chega-se ao valor de rigidez a partir da inclinação da curva, conforme apresentado na
figura 27.
Figura 27 – Gráfico da Força da “Mola” Versus Deslocamento do
CompensadorHidro-Pneumático Passivo e a Reta Relativa à Tendência da Curva
(Resultados da Equação-4)
Com o uso do programa Excel, foi possível traçar o gráfico mostrado na figura
27 e também foi possível traçar a reta que fornece a tendência para a curva calculada.
É possível observar pelo gráfico que a curva encontrada a partir do
desenvolvimento da equação (4) coincide com uma reta em todos os seus pontos, isto é,
considerando uma variação de 10% da carga nominal agindo no compensador, a não
linearidade da rigidez do gás comprimido no sistema de compensação de heave pode ser
desconsiderada.
y = 0,1995x + 0,8948
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
1,8
2
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1
δ / δT
THC/ W
T
VALORES Linear (VALORES)

53
Para valores de variação diferentes de 10% a aproximação da curva para uma
reta provocaria um aumento nos erros de aproximação conforme comentado no item
5.5. Para o método adotado, o gráfico da força da “mola” versus o o deslocamento segue
conforme a figura 28 abaixo, para diferentes valores de k.
Figura 28 – Gráfico da Força da “Mola” Versus Deslocamento do
CompensadorHidro-Pneumático Passivo para Diferente Valores de “k”
(Resultados da Equação-4)
Chegando ao valor da inclinação da curva (inclinação da curva igual a 0,2),
tem-se o valor da rigidez (0,2kN/m) [5], da seguinte forma:
1- considera-se um sistema massa mola conforme equação (4);
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1
δ / δT
THC /
WT
k=0,000001 k=0,1 k=0,3 k=0,5 k=0,7 k=0,9 k=0,999999

54
xkT ⋅−=
2- Assume-se valores de referência para a Força (TR = 1 kN) e para o
deslocamento (XR = 1m);
3- Divide-se ambos os termos da equação pelos valores de referência:
RR
R
R Xx
TXk
TT
⋅⋅−= )(
Da mesma forma pode-se concluir que a inclinação do gráfico (THC/ WT) x
(δ/δT) possui seu valor expresso em kN/m, sendo então coerente com as unidades que
estão sendo utilizadas.
Durante o desenvolvimento da simulação não compensada não foi observada
ressonância do sistema, onde o amortecimento torna-se-ia importante [6]. Assim, foi
atribuído para coeficiente de amortecimento o valor de 1kN*s/m, esse valor é resultado
de uma análise de sensibilidade feita a partir de simulações comparadas para diversos
valores de amortecimento.
5.3.4 Simulação Dinâmica Compensada
Uma vez considerada a rigidez do sistema linear, conforme item 5.3.3.1, foi
possível a inclusão do elemento de compensação do programa ORCAFLEX no modelo
mostrado no item 5.3.3, figura 26, e dos dados do item 5.2 em a fim de gerar as curvas
do sistema compensado conforme figura 29.

55
O intervalo de análise foi realizado conforme mostrado anteriormente nas
figuras 20 e 21 com o objetivo de conseguir efetivamente o intervalo que contém a
condição mais crítica, conforme explicado no item 5.3.3.
Na figura 29 são mostrados os resultados das simulações compensada e não-
compensada durante o intervalo de 14773000 a 14774000 segundos (variação de 1000
segundos). Os gráficos sobrepostos que fornecem a variação do movimento da popa do
navio (A-frame) e do PLEM.
Figura 29 – Curvas de Deslocamento Sobrepostas do A-Frame e do PLEM
(Compensado e Não Compensado) para o Intervalo Crítico.
-14
-12
-10
-8
-6
-4
-2
0
2
4
6
8
10
12
14
400 500 600 700 800 900 1000
Tempo (s)
Am
plitu
de (m
)
PLEM não-compensado A-frame não-compensado PLEM compensado

56
A figura 30, a seguir, expande o intervalo de 750 s até 800 s contidos no
intervalo total de 1000 s da simulação não compensada para que possam ser
vislumbrados os efeitos da excitação promovida pela onda na embarcação (A-frame) e
no PLEM e os resultados da compensação.
Figura 30 – Curvas de Deslocamento Sobrepostas da Onda, A-Frame e PLEM
(Compensado e Não Compensado) para o Intervalo Mais Crítico (Detalhe)
Conforme o detalhamento acima a posição do PLEM em comparação com o
movimento do A-frame identifica o efeito da elasticidade do cabo de sustentação na
movimentação do equipamento. Após a inclusão do compensador de heave, desaparece
o efeito da elasticidade do cabo e atenua-se a variação da posição do PLEM, para uma
mesma excitação de onda e movimento do navio de instalação.
-14
-12
-10
-8
-6
-4
-2
0
2
4
6
8
10
12
14
750 760 770 780 790 800
Tempo (s)
Am
plitu
de (m
)
PLEM não-compensado Onda A-frame PLEM compensado

57
Efetuando a observação relativa à variação de carga oriunda dos movimentos
durante o intervalo que contém o intervalo crítico foi possível extrair da simulação e
efetua a unificação no gráfico de força (tração) no domínio do tempo conforme a figura
31:
Figura 31 – Curvas de Carga Sobrepostas para o A-Frame e PLEM no
Intervalo Crítico que Contém o Maior Pico
O gráfico da figura 31 mostra a atenuação das cargas oriundas da excitação da
onda sobre o navio de instalação, a partir da comparação entre as curvas do PLEM e do
A-frame não compensados e compensados.
0
50
100
150
200
250
300
350
400
450
500
550
600
650
750
Tempo (s)
Traç
ão (k
N)
A-frame compensado PLEM compensado A-frame não-compensado PLEM não-compensado

58
A fim de verificar a acurácia do sistema passivo de compensação, foi extraído
da simulação dinâmica o gráfico mostrado na figura 32, onde é possível observar o
sincronismo entre a excursão da popa do navio (A-frame) oriunda da excitação
promovida pela onda no intervalo crítico, e o aumento do cabo disponível no sistema na
mesma taxa de amplitude. É importante lembrar que o aumento do cabo disponibilizado
pelo compensador de heave é “a” vezes (número de voltas do cabo no compensador de
heave - vide item 4.2) a excursão do pistão do compensador de heave, conforme
mostrado na figura 12.
Figura 32 – Curva de Resposta do Compensador de Heave
-14
-12
-10
-8
-6
-4
-2
0
2
4
6
8
10
12
750 760 770 780 790 800
Tempo (s)
Am
plitu
de (m
)
PLEM A-Frame Compendador de Heave

59
5.4 RESULTADOS
Tem-se na figura 31 que a variação de carga no A-frame fazia com que o
projeto de instalação do equipamento submarino fosse dimensionado para cargas de
pelo menos 62 toneladas no guincho, enquanto a carga média seria da ordem de 33
toneladas. Após a inclusão do compensador a carga máxima chega a 26,9 toneladas no
A-frame, que considera a carga do cabo, e 16,8 toneladas no PLEM. Considerando a
carga do PLEM na extremidade inferior do cabo, o arranjo de peças (massames) para o
içamento da carga teria que ser apropriado apenas sua carga emersa, isto é, da ordem de
20 toneladas. Conforme havia sido informado anteriormente, a experiência mostra que a
previsão de equipamentos para grandes cargas torna o projeto mais caro, além de
diminuir significativamente a operacionalidade. O Fator de amplificação dinâmica
máximo para a condição não compensada, de 1,88, baixou, com o compensador de
heave, para 1,02.
Em relação à amplitude dos movimentos do PLEM para um sistema
compensado e não compensado, observa-se na figura 29 que a amplitude para a
condição mais crítica diminui de 21,21 m para o valor de apenas 1,19 m.
Pelo gráfico mostrado na figura 32 é possível observar o atraso na resposta do
compensador, tal atraso no efeito de compensação mostrou-se desprezível, uma vez que
ele permanece proporcional para todo o período de simulação.

60
5.5 COMENTÁRIOS SOBRE OS RESULTADOS
Comparando os gráficos de amplitude de movimento para o PLEM, figura 29
observa-se que o maior de amplitude é reduzido de 21,21 m para 1,19 m, conforme
informado no item 5.4, isso representa uma diminuição de 94% do movimento gerado
pela condição mais severa de mar indicado no item 5.2.1.
A eficiência do sistema de compensação, para a condição mais severa de mar,
se considerada como a razão entre a diferença dos fatores de amplificação (1,88 - 1,19
= 0,69) e a parcela de sobrecarga do sistema não compensado (1,88 – 1 = 0,88) pode
chegar a um valor igual a 78%.
Conforme item 5.5.5.1, ao valor de “k” na a equação (4) foi atribuído o valor
de 0,1, ou seja, considerou-se uma variação máxima de 10% da carga média. Após o
estudo do sistema compensado observou-se uma variação de carga da ordem de 2%.
Embora os 10% sejam parâmetros “máximos”, que conteriam o valor de 2% encontrado,
não foi pesquisada a razão da discrepância que faz com que os valores não tenham
coincidido nos 10%. Uma razão para tal discrepância poderia ser devido à possibilidade
do método ser demasiadamente conservador para determinados valores de “k”.
O fator de amortecimento, não influiu nos resultados não compensados, uma
vez que os resultados não apresentaram condições de ressonância.

61
Para o dimensionamento de um sistema de compensação de heave utilizando o
modelo apresentado, faz-se necessário que o curso do pistão tenha comprimento
suficiente para que não existam picos de carga oriundos do fim de curso. Com isso a
análise de sensibilidade, quanto ao número de voltas o cabo de aço fará nas polias do
compensador bem como o valor da pressão do sistema hidro-pneumático se faz
necessária, tendo em vista a disponibilidade de espaço nas instalações da embarcação.
5.5.1 Discussão Sobre a Relação da Compressibilidade do Gás e a Rigidez
Considerando o sistema do pistão conectado ao tanque hidro-pneumático,
mostrado na figura 33 é possível observar que:
Figura 33 – Representação do Sistema Cilindro-Reservatório
Sendo P0 e Pf as pressões inicial e final do sistema passivo, respectivamente; L0
e Lf a altura da coluna de gás no reservatório; F0 a força que mantém o sistema em
equilíbrio e ∆F a variação da força no compensador, é possível dizer, a partir de (2) que:
P0 x V0n = Pf x Vf
n;
L f
L 0
P0; Pf
∆L
P0; Pf
F0+ ∆F

62
Logo, considerando as áreas do cilindro e do reservatório como sendo iguais
tem-se:
P0 x L0n = Pf x Lf
n;
Como P = F /A, tem-se:
(F0/A) x L0n = [(F0 + ∆F)/A] x Lf
n ⇒ 1 + ∆F/ F0 = (L0/ Lf)n
logo:
Sendo um gráfico a relação de ∆F e F0, da forma:
Assim sendo:
Considerando (5) em (6), tem-se:
Todavia, como:
∆F = F0 x [L0/Lf)n – 1 (5)
d(∆F) / d(∆L) = k
∆F
∆L
∆F = k x ∆L (6)
k = [(L0/Lf)n –1] x F0/∆L (7)
Lf = L0 – ∆L (8)

63
Considerando (7) em (8), tem-se:
É possível observar a similaridade entre as equações (4) e (9), pois ambas
chegam ao valor da rigidez do sistema em função dos deslocamentos promovidos dentro
do compensador de heave. Outra observação importante é que a rigidez do sistema
independe das áreas do pistão e do reservatório, que influirão apenas na pressão inicial
do sistema.
Com isso, é possível observar o efeito da variação do comprimento do
reservatório numa variação de 1m de deslocamento de fluido hidráulico, conforme
figura 34.
Figura 34 – Curva da Rigidez do Gás em Relação ao Comprimento Inicial do
Reservatório
Da mesma forma é possível verificar (figura 35), para determinados valores de
deslocamento, a variação de rigidez a partir de diferentes comprimentos de reservatório.
k = {[1 / (1- ∆L/L0)n ]- 1}x F0/ ∆L (9)

64
Figura 35 – Curva da Rigidez do Gás em Relação ao Deslocamento e ao
Comprimento Inicial do Reservatório

65
Complementando, é possível efetuar a observação quanto à dependência da
rigidez com o deslocamento, que num sistema linear seria constante; a verificação de
uma aproximação linear e uma verificação do erro na aproximação para um modelo
linear a partir de comprimentos iniciais teóricos de 10m e 3m, que seguem como
exemplo, para um deslocamento (stroke) de 1m .
• Para L0 = 10m:
Figura 36 – Curva da Dependência da Rigidez do Gás em Relação ao
Deslocamento Máximo de 1m, para L0 = 10m

66
Figura 37 – Curva de Verificação da Linearização da Rigidez, para L0 = 10m.
Figura 38 – Curva do Erro na Força Devido à Linearização da Rigidez do
Gás, para L0 = 10m.

67
• Para L0 = 3m:
Figura 39 – Curva da Dependência da Rigidez do Gás em Relação ao
Deslocamento Máximo de 1m, para L0 = 3m.

68
Figura 40 – Curva de Verificação da Linearização da Rigidez, para L0 = 3m.
Figura 41 – Curva do Erro na Força Devido à Linearização da Rigidez do
Gás, para L0 = 3m.

69
6 CONCLUSÕES
6.1 RESUMO FINAL
Um sistema eficiente de compensação de heave necessita reduzir
significativamente as variações de carga e de posição do equipamento que está sendo
instalado, considerando uma faixa típica de condição de mar. Necessita também ter boa
influência quando em operações em condições críticas de mar. Uma análise de
sensibilidade deverá limitar as condições extremas de mar a fim de que se realize um
projeto de dimensionamento de um sistema de compensação de heave dentro de
parâmetros economicamente mais realistas.
Apesar de existirem vários estudos sobre a dinâmica de corpo suspenso por
cabo, poucos estudos observam condições extremas em uma aplicação de engenharia
submarina contemplando uma avaliação para dar subsídios aos projetos de sistemas de
instalação de equipamentos submarinos para uma operacionalidade máxima.
As simulações dinâmicas para a verificação do comportamento de um sistema
compensado, intuitivamente, serão sempre importantes a fim de assegurar que os
parâmetros de rigidez e amortecimento não promovam ressonância ao sistema,
principalmente para as maiores profundidades (>1000m) na instalação de equipamentos
leves (< 30 toneladas).
Para a condição mais severa de mar para uma condição anual, o modelo
proposto mostrou-se eficiente reduzindo em cerca de 94% a amplitude de movimento do
PLEM e cerca de 78% as cargas máximas que ocorrem na operação quando comparado
a um sistema não compensado.

70
A indústria offshore ultrapassa limites a cada dia, a quantidade de recursos
envolvidos nas operações, bem como a quantidade homens em trabalho de extremo
risco faz com que as respostas de engenharia tenham que ser sempre eficientes e
seguras. Para isso o estudo das operações precisa tornar-se efetivo. Não pode ser mais
considerado que tarefas sejam desenvolvidas quase que pelas mãos de artesãos, a
sensibilidade dos profissionais tem que ser traduzida em métodos e técnicas a ponto de
poder haver evolução da qualidade dos serviços e também formação de profissionais em
uma escala maior a fim de atender a demanda que cresce no país e no mundo.

71
6.2 TRABALHOS FUTUROS
Na área da pesquisa diversos passos ainda podem ser desenvolvidos para o
avanço do conhecimento sobre compensadores de heave. Dentre eles, os mais notáveis
seriam:
• Inclusão de condições de “fim de curso” do cilindro do compensador de
heave no modelo;
• Estudo paramétrico das principais variáveis visando a otimização do
sistema para condições operacionais diversas;
• Desenvolvimento de um sistema de compensação semi-ativo,
modelando-se os diversos sensores e atuadores e estabalecendo-se a
malha de controle mais adequada ao sistema
Na área da engenharia aplicada, um anteprojeto de um sistema deveria ser
desenvolvido para a identificação de novas áreas ou tópicos que necessitam de
desenvolvimento.

72
7 BIBLIOGRAFIA
[1] TANNURI, EDUARDO AOUN, Desenvolvimento de Metodologia de Projeto de
sistema de Posicionamento Dinâmico Aplicado a Operações em Alto-Mar.
D.Sc, USP, São Paulo, 2001.
[2] CERQUEIRA, MAXWELL B.; Instalação de Equipamentos em Águas
Ultraprofundas Através de Suspensores Flexíveis; M.Sc, COPPE/UFRJ, Rio
de Janeiro, 1998
[3] DALMAIJER, J.W. and KUIJPERS, M.R.L., Heave Compensation for Deep Water
Installation, DOT, 2003.
[4] DRISCOLL, FREDERIK R.; NAHON, MEYER and LUECK ROLF G., A
Comparison of Ship-Mounted and Cage-Mounted Passive heave Compensation
System, Journal of Offshore Mechanics and Artic Engineering , V. 42, Nº 2, pp.
145-183, 1999.
[5] ADAMSON E. JAMES, Efficient Heave Motion Compensation for Cable-Suspended
Systems, DOT, 2003.
[6] THOMSON, WILLIAM T, Teoria da Vibração com Aplicações. 1ª. Ed; tradução de
Cássio Sigaud, Interciência, 1978.

73
[7] SAGATUN, SVEIN I.; JOHANSEN, TOR A.; FOSSEN, THOR I. And NIELSEN,
FINN G., Wave Synchronizing Crane Control during Water Entry in Offshore
Moonpool Operations, DOT, 2003.
[8] MORAIS, MARCOS; AZEVEDO, FÁBIO; KVELLO, ODD and TANSCHEIT,
PETER, Deep Water achievements and Challenges on the Extra Roncador
Pipeline Installation project, OTC, 2001.
[9] BUCHNER, BAS; BUNNIK,TIM; HONIG, DICK and MESKERS, GEERT, A New
Simulation Method for the Installation of Subsea Structures from the Splash
Zone to the Ultra Deep, DOT, 2003.
[10] GUERIN, G and GOLDBERG, D., Heave Compensation and Formation Strength
Evaluatio from Dowhole Acceleration Measurements While Coring, Geo-Mar
Lett. 22., New York, pp. 133-141, Springer-Verlag, 2002.
[11] KORDE, Umesh A., Active Heave Compessation on Drill-Ships in Irregular Waves,
Ocean Engineering, Vol. 25, Nº 7, Great-Britain, pp.541-561, Elsevier Science,
1988.
[12] HOVER, FRANZ S., Simulation of Stiff Massless Thethers, Ocean Engineering,
Vol. 24, Nº 8, Great-Britain, pp.765-783, Elsevier Science, 1987.

74
[13] KORDE, Umesh A., Phase Control of Floating Bodies from On-board Reference,
Ocean Engineering, Vol. 23, Nº 10, Great-Britain, pp.251-262, Elsevier
Science, 2001.
[14] LUECK, R. G.; DRISCOLL, F. R. and NAHON, M., A Wavelet forPredicting the
Time Domain Response of Vertically Tethered Systems, Vol. 27, Great-Britain,
pp.1441-1453, Elsevier Science, 2000.
[15] HUANG, S., Stability Analisys of the Heave Motion of Marine Cable-Body Systems,
Vol. 26, Great-Britain, pp.531-546, Elsevier Science, 1999.
[16] MORRISON, DENBY G.; SWANSON, RICHARD C. and PRITCHARD, JOHN J.,
Dynamics of a Novel Heave-Compensated Deepwater Intervention System,
ASME, 1996.
[17] THOMAS, JOSÉ E. (organizador), Fundamentos de Engenharia de Petróleo, 1a ed.,
Rio de Janeiro, Interciência, 2001.
[18] WYLEN, GORDON J. VAN e SONNTAG, RICHARD E., Fundamentos da
Termodinâmica Clássica, tradução da 3ª edição americana, São Paulo, Edgard
Blücher, 1993.
[19] Catálogo CIMAF Cabos S/A – Maio 2002

75
[20] CANDELLA, ROGÉRIO NEDER, Estudo de Casos de Ondas no Atlântico Sul
Através de Modelagem Numérica. M.Sc, COPPE/UFRJ, Rio de Janeiro, 1997.
[21] PINHO, UGGO FERREIRA; Caracterização dos Estados de Mar na Bacia de
Campos, M. Sc, COPPE/UFRJ, Rio de janeiro, 2003.
[22] ORCINA LIMITED, Design Software for Flexible Risers and Offshore Systems –
Visual Orcaflex Manual User, U,K, 1997.
[23] NIEDZWECKI, J. M., THAMPI, S. K., “Snap loading of Marine cable systems”,
Applied Ocean Research, vol. 13 No 1, 1991.
[24] SPHAIER, S.H., Hidrodinâmica, Departamento de Engenharia Naval / Escola de
Engenharia / Universidade Federal do Rio de Janeiro, RJ, Brasil, 1996.
[25] FONSECA, A., Vibrações, Rio de Janeiro, RJ, Brasil, Ao Livro Técnico S.A., 1964.
[26] FALTINSEN, O., Sea Loads on Ships and Offshore Structures, Cambridge
University Press, U.K., 1990.
[27] BRADLEY, HOWARD B.; Petroleum Engineering Handbook; Society of Petroleum
Engineers; Richardson; TX, USA.

76
[28] RHODES, Q. Z., HANEY, J.D., CAREY, J.D., A Low Power/High Performance
Active Heave Compensation System , Proceedings Underwater Intervention
2002 Conference, New Orleans, LA, February 2002.
[29] CERQUEIRA, M.B., FERNANDES, A.C and SPHAIER, S.H.; Parametric Study of
Intervention System in Ultra-deepwater up to 3000m Using Passive Heave
Compensation; 10th International Offshore and Polar Engineering Conference
(ISOPE); Seattle, Estados Unidos, May,28-June,02, 2000;

77
APÊNDICES
A.1 PRINCÍPIOS BÁSICOS DO PROGRAMA ORCAFLEX
Para o desenvolvimento do trabalho, a principal ferramenta para a execução
das simulações foi o programa ORCAFLEX. Os princípios básicos utilizados pelo
programa são:
a. Princípio da Análise Estática
Existem dois objetivos em uma análise estática:
• Determinar a configuração de equilíbrio do sistema sobre peso, flutuabilidade,
arrasto hidrodinâmico, etc.
• Oferecer uma configuração inicial para a simulação dinâmica.
Na maior parte dos casos, a configuração de equilíbrio estático é o melhor
ponto inicial para a simulação dinâmica, e esses dois objetivos tornam-se um só. No
entanto, há ocasiões em que isso não se aplica, e o Orcaflex fornece ferramentas para se
lidar com esses casos especiais.
O equilíbrio estático é determinado por uma série de cálculos iterativos
conjugados. No início do cálculo, as posições iniciais das embarcações e bóias (3D e
6D) são definidas pelos dados de entrada. Esses, por sua vez, definem as posições
iniciais das extremidades das linhas conectadas a eles. A configuração de equilíbrio para
cada linha é então calculada, que determina as forças aplicadas pelas linhas aos outros

78
corpos livres. O vetor de força desbalanceado agindo sobre cada corpo livre é então
calculado junto com a matriz de rigidez associada, e uma nova posição para os corpos é
então calculada pela técnica de Newton-Raphson. O cálculo é então repetido dessa nova
posição inicial. O processo é repetido até que o vetor força média em cada corpo for
zero (dentro de uma pequena tolerância).
Para sistemas simples a análise estática é rápida e confiável. Para sistemas
muito complexos, com múltiplos corpos livres e interconexões, entretanto, a
convergência deve ser difícil de ser atingida. Para ajudar a sobrepor esse problema, o
Orcaflex fornece ferramentas para que o usuário suprima alguns graus de liberdade do
sistema, e aproxime o verdadeiro estado de equilíbrio por uma série de estágios simples.
Finalmente, a análise estática pode também ser transformada em uma análise de regime
permanente especificando-se velocidade inicial diferente de zero nos dados de entrada.
Isso é útil quando modelando sistemas rebocados ou outros sistemas que têm velocidade
constante.
b. Princípio da Análise Dinâmica
A análise dinâmica do Orcaflex é uma simulação no domínio do tempo que usa
uma técnica de integração explícita de Euler com tempo constante que é especificada
nos dados de entrada. No início da simulação, as posições iniciais e orientações de todos
os objetos no modelo, incluindo todos os nós em todas as linhas, são conhecidos da
análise estática. As forças e momentos agindo, sobre cada corpo livre e cada nó, são
então calculadas. As forças e momentos considerados incluem:

79
• Peso
• Flutuabilidade
• Arrasto hidrodinâmico e aerodinâmico
• Efeitos de massa hidrodinâmica adicionada, calculados usando a forma comum
extendida da equação de Morrison com coeficientes definidos pelo usuário.
• Força e deformação
• Flexão e Torque
• Reação e fricção no solo marinho
• Forças de contato com outros objetos
• Forças aplicadas por conexões e guinchos
A equação do movimento (Lei de Newton) é então formada para cada corpo
livre e para cada nó de linha:
{ } { } { }FxM =⋅ ''
onde {M} é a matriz de massa para cada nó ou corpo, incluindo termos de massa
hidrodinâmica adicionada, {x''} é o vetor aceleração, e {F} o vetor força resultante. A
equação é resolvida para o vetor aceleração, que é então integrado. Ao final de cada
constante de tempo, as posições e orientações de todos os nós e corpos livres são
novamente conhecidas e o processo é repetido.
A constante de tempo requerida para uma integração estável é muito pequena -
tipicamente em torno de 0,001s. O Orcaflex dá dicas de como se escolher a constante de
tempo mais adequada. As forças hidrodinâmicas e aerodinâmicas tipicamente mudam
muito pouco em uma constante de tempo tão pequena, e consomem bastante tempo para

80
se computar. Para economizar tempo de cálculo, essas cargas são atualizadas em uma
constante de tempo "externa" maior. Ambas as constantes de tempo são definidas pelo
usuário, e podem ser ajustadas para serem iguais em casos críticos.
O tempo de simulação é ainda mais reduzido com o uso de um tempo de
estabilização no início da simulação. Durante o período de simulação a amplitude das
ondas e os movimentos da embarcação são aumentados suavemente, de zero até a
amplitude total especificada nos dados de entrada. Isso garante um início de simulação
estável e contínuo, o que reduz respostas transientes e evita a necessidade de longas
simulações.
O tempo de estabilização é especificado nos dados de entrada, e normalmente
deve ser de no mínimo um comprimento de onda. Tempo negativo é mostrado durante a
simulação para indicar o tempo de estabilização; portanto tempo abaixo de zero é o
tempo de estabilização, e tempo acima de zero é simulação normal, com a excitação
especificada completa.
Como a geometria do sistema é recalculada em cada constante de tempo, a
simulação considera totalmente as não linearidades, incluindo a variação espacial de
ambas as cargas de ondas e de contato. Note que o método de solução não envolve a
construção e inversão de uma matriz de rigidez para nenhuma parte do sistema. Uma
consequência importante é que o programa não tem nenhuma dificuldade em lidar com
a transição entre tração e compressão em linhas, por exemplo, ao tocar o solo marinho.

81
Dos vários objetos disponíveis no Orcaflex, as linhas são os que mais
demandam recursos computacionais. Para a maior parte dos modelos que incluem
linhas, o tamanho do tempo de simulação dinâmica é aproximadamente proporcional ao
total do número de nós usados multiplicados pelo número total de constantes de tempo
internas na simulação completa. Caso a constante de tempo seja mantida em seu valor
máximo recomendado, e os nós forem distribuídos uniformemente ao longo das linhas,
então o tempo de simulação é aproximadamente proporcional ao quadrado do número
de nós.
A simulação pode ser interrompida pressionando-se o botão de Pause. O
Orcaflex irá pausar quando alcançar o final da constante de tempo externa atual,
portanto se a constante de tempo externa é grande, serão necessários alguns segundos.
Quando a simulação é pausada, pode-se usar a maioria dos comandos normais. Então,
por exemplo, pode-se examinar os resultados obtidos até então e examinar os dados.
A.2 TEORIA DE ONDAS
Tradicionalmente, as ondas oceânicas são simuladas pela superposição
de vários trens de onda (também conhecidos como ondas livres ou lineares) de
diferentes freqüências e amplitudes, avançando em diferentes direções. No contexto da
teoria linear das ondas, as interações entre essas ondas livres são ignoradas. Se os
componentes de ondas livres de um campo de ondas irregular são conhecidos, então a
solução linear correspondente para a elevação e potencial resultantes pode ser obtida
simplesmente pela superposição das soluções correspondentes para estas ondas livres. A

82
elevação e potencial resultantes de um campo de ondas irregular, ( , , )x y tη e
( , , , )x y z tφ , é dado por
1 1
1 1
cos , (2.14a)
cosh[ ( )] sin , (2.14b)cosh
where (cos sin ) .
N M
nm nmn mN M
nm nnm
n nn m
nm n nm nm n nm
a
a g k z hk h
k x y t
η θ
φ θσ
θ χ χ σ β
= =
= =
=
+=
= + − +
∑∑
∑∑
Pode-se notar que a freqüência da onda, nσ , e o número de onda, nk , estão
relacionados pela relação de dispersão. Sem perda de generalidade, definimos que
1 2 3 ....σ σ σ< < < , ou seja, um índice maior corresponde a uma freqüência mais alta. O
somatório externo das equações está relacionado à freqüência da onda. Está
praticamente truncado a uma freqüência alta, Nσ , conhecida como freqüência de corte.
A escolha de uma freqüência de corte depende de vários fatores. Primeiramente, a
distribuição de energia do campo de ondas irregulares representado é insignificante para
além da freqüência de corte, Nσ . Segundo, se a elevação da onda é computada baseada
em medidas de outras propriedades de onda, então a energia da onda medida até a
freqüência de corte deve ser confiável, Isto é, abaixo da freqüência de corte, a razão de
sinal por ruídos nas medidas deve ser significante. Finalmente, é também limitada pela
freqüência de Nyquist ou pela taxa de amostragem das medições para evitar dados
irrelevantes (ruído) (Oppenheim and Schafer 1975). O somatório interno das equações
diz respeito à direção da onda. A escolha de M depende da resolução da direção da
onda, que é igual a 2 / Mθ π∆ = . A soma interna indica que existem vários trens de
onda de mesma freqüência, mas em direções diferentes. Esses trens de onda podem
onde

83
formar um padrão de onda parcial estática e conseqüentemente a amplitude resultante da
onda nessa freqüência não é mais uniforme no plano x-y. Para evitar não uniformidades,
foi sugerido que as somas internas fossem eliminadas, e a representação da elevação das
ondas irregulares se reduz a:
1
cos , (2.15)
where (cos sin ) ,
N
n nn
n n n n n n
a
k x y t
η θ
θ χ χ σ β=
=
= + − +
∑
Na Equação anterior, foi assumido que em cada freqüência discreta há somente
um trem de onda avançando na direção de um ângulo nχ . Entretanto, trens de onda de
freqüências diferentes provavelmente avançam em direções diferentes. Isto é,
nm χχ ≠ se nm ≠ . Incrementos na freqüência devem ser muito menores em um modelo
de somatório simples do que em um modelo de somatório duplo, como s dm f f∆ = ∆ ,
onde m é um número inteiro maior que um. Então, em um modelo de somatório simples
existem várias (m) ondas livres com pequenas diferenças de freqüência perto de cada
freqüência discreta do modelo de somatório duplo correspondente. Essas ondas livres de
freqüências levemente diferentes podem avançar em direções diferentes para que o
espalhamento direcional possa ser aproximadamente representado como em uma
simulação de somatório duplo. Na ausência de reflexões de onda significantes, o modelo
de somatório simples parece ser capaz de representar o espalhamento direcional de
ondas oceânicas adequadamente.
Quando todas as ondas livres constituindo um campo de ondas irregular
avançam em uma mesma direção, por exemplo, ao longo do eixo x, é conhecido como
trem de onda irregular unidirecional. Sua elevação é expressa por:
onde

84
1
cos , (2.16)
where .
N
n nn
n n n n
a
k x t
η θ
θ σ β=
=
= − +
∑
O potencial de onda resultante, e conseqüentemente as propriedades da onda
resultante, como a pressão de onda, velocidades e acelerações, podem ser obtidas pela
superposição dessas ondas livres.
A informação de ondas livres constituindo um campo de ondas irregular pode
ser obtida de duas maneiras distintas. As ondas livres podem ser adquiridas pela
decomposição de um campo de ondas irregular baseado em medições. Elas também
podem ser determinadas pelo espectro da freqüência, como o espectro de Pierson-
Moskowitz (PM) (Pierson e Moskowitz 1964) e o espectro JONSWAP (Hasselmann et
al. 1973). Um espectro de freqüência descreve a densidade de energia como uma função
da freqüência da onda. Num espectro PM,
4
2
4 5
5( ) exp , (2.17)(2 ) 4pm
p
g fS ff f
απ
− = −
onde α é uma constante dependente da velocidade do vento, g é a aceleração
gravitacional, f é a freqüência da onda em Hz e pf a freqüência onde o pico espectral
está localizado. Num espectro JONSWAP,
onde

85
42
4 5
2
2 2
5( ) exp , (2.18)(2 ) 4
( - )exp - ,
2
0.07 for ,
0.09 for
dJONSWAP
p
p
p
p
p
g fS ff f
f fd
f
f ff f
α γπ
σ
σ
− = −
=
≤
= >
onde γ é conhecido como o parâmetro de forma do pico, representando a
razão da densidade de energia espectral máxima pelo máximo do espectro PM
correspondente. O termo dγ é conhecido como fator de aprimoramento de pico. Em
essência, a equação anterior mostra que um espectro JONSWAP é o produto do espectro
PM correspondente e o fator de aprimoramento de pico. Baseado em medições de ondas
oceânicas, γ é considerado como uma variável randômica de uma distribuição normal
com média 3,30 e variância 0,62 (Ochi 1979). Além desses dois espectros de freqüência
bem conhecidos, há vários outros espectros de freqüência propostos para várias ondas
oceânicas. Um sumário destes espectros pode ser encontrado em Goda (1990) e Ochi
(1998).
Para se simular ondas irregulares, um espectro de freqüência em forma
analítica é primeiro discretizado usando-se um incremento de freqüência uniforme f∆ .
A duração não repetível da elevação da onda resultante é, então, 1/ f∆ . Portanto, para
maiores intervalos de tempo de simulação, um f∆ menor ou incrementos de freqüência
não uniformes devem ser adotados. A densidade de energia em uma freqüência discreta
nf n f= ∆ está relacionada ao espectro de freqüência por :
( ) . (2.19)n nS S f f= ∆

86
No caso de ondas irregulares unidirecionais ou ondas irregulares direcionais
simuladas pelo modelo de somatório simples, a amplitude a uma freqüência nf é:
2 ( ) . (2.20)n nA S f f= ∆
As fases iniciais de ondas livres são selecionadas randomicamente de 0 a 2π .
Para um trem de ondas unidirecional, a elevação resultante e o potencial podem ser
obtidos pela superposição dos valores correspondentes de todas as ondas livres. Para um
campo de ondas direcional regular simulado por um modelo de somatório simples, as
direções das ondas livres em freqüências discretas necessitam ser especificadas. A
seleção das direções de ondas livres é similar ao descrito abaixo.
Usando um modelo de duplo somatório para simular ondas direcionais
irregulares, a direção principal da onda em cada freqüência discreta é dada baseado em
conhecimentos sobre climatologia de ondas ou critérios de design específicos. O
espalhamento da onda na direção principal a uma freqüência discreta foi proposto por
vários modelos de espalhamentos diferentes. Entre eles, a função de espalhamento do
tipo 2cos s χ , também conhecida como do tipo Mitsuyasu, é amplamente adotada em
simulações de onda, como descrito abaixo:
2 00( , ) cos ( ), (2.21)
2sG f G χ χχ −
=
onde χ é a direção da onda e 0χ a direção principal da onda em uma
freqüência f; s é um parâmetro para ajustar a direção de espalhamento; 0G uma
constante que garante a integração da função de espalhamento com respeito à direção da
onda, é igual a um.

87
( , ) 1 (2.22)G f dπ
πχ χ
−=∫
O parâmetro s varia de acordo com a freqüência. Mitsuyasu at al. (1975)
sugeriu a seguinte fórmula para ondas de vento:
50
2.50
2.50
( / ) (2.23)
( / )
11.5(2 / ) ,
p p
p p
p
s f f f fs
s f f f f
s f U gπ
−
−
≤= >=
onde U é a velocidade do vento. Para se aplicar a função de espalhamento ao invés das
ondas de vento, Goda (1985) propôs 0 10s = para ondas de vento, 0 25s = para
ondulações de distância de descaimento curta e 0 75s = para ondulações de distância de
descaimento longa. Usando a equação para densidade de energia em uma freqüência
discreta e a equação de Mitsuyasu, a densidade de energia e a amplitude de um
componente de onda de freqüência discreta nf e ângulo direcional nmχ pode ser
determinada por:
,
, ,
( , ) , (2.24)2 / , and ,
2 . (2.25)
n m n n nm
nm
n m n m
S S G fM m
A S
χ χ
χ π χ χ
= ∆
∆ = = ∆
=

88
A.3 MOVIMENTOS DO NAVIO
Os movimentos de embarcações em ondas são definidos pelos Operadores de
Amplitude de Resposta (RAO). Cada RAO consiste em um par de números que definem
a resposta da embarcação, para um determinado grau de liberdade, para uma
determinada direção de onda e período. Os dois números são uma amplitude, que
relaciona a amplitude do movimento da embarcação à amplitude da onda, e uma fase,
que define o tempo da movimentação da embarcação relativo à onda.
Por exemplo, um RAO de avanço de 0,5 em uma altura de onda de 4m
(portanto amplitude de onda de 2m) quer dizer que a posição da embarcação varia entre
–1m a 1m de sua posição estática; um RAO de caturro de 0,5° por metro na mesma
onda quer dizer que a embarcação arfa entre –1° e 1°.
As embarcações têm 6 graus de liberdade: 3 translações (avanço, deriva,
arfagem) e 3 rotações (jogo, caturro, guinada), então o RAO consiste de seis pares
amplitude + fase para cada período e direção de onda. A amplitude e fase do RAO
variam de acordo com a embarcação, e para uma dada embarcação elas variam com
corrente de ar, direção da onda, velocidade avante, e período (ou freqüência) da onda. É
importante obter-se valores exatos de amplitude e fase do RAO se a dinâmica do
sistema deve ser modelada corretamente.
RAOs podem ser obtidos tanto de modelos de teste como de programas
computacionais especializados. A informação deve ser apresentada em forma de tabelas
ou de gráficos: tabelas de números são mais adequadas aos nossos propósitos, já que
elas podem ser importadas diretamente para o Orcaflex.

89
Existem várias convenções diferentes para se definir RAOs. Já houve vários
esforços para se padronizá-los, porém eles não foram bem sucedidos. Ainda existem
diferenças entre os principais programas de computador e os modelos construídos.
Alguns estabelecimentos utilizam até convenções diferentes para o modelo e os dados
computados. O único caminho seguro é obter a descrição completa do sistema utilizado
para os dados em cada caso.
A convenção de Orcina é utilizar-se a resposta de amplitude (em unidades de
comprimento de avanço, deriva, arfagem, em graus para jogo, caturro, guinada) por
unidade de amplitude da onda, e usar o atraso na fase do tempo que a crista da onda
passa pela origem do RAO até que a excursão positiva máxima é alcançada. (em outras
palavras, a origem da fase é a mesma origem do RAO). Matematicamente:
)cos( fwtRax −=
Onde x é o deslocamento da embarcação (em unidades de comprimento para surge,
sway e heave, em graus para roll, pitch e yaw)
a, w são amplitude de onda (em unidades de comprimento) e freqüência (em
radianos/segundo)
t é o tempo (em segundos)
R e f são a amplitude e fase do RAO
No entanto, o Orcaflex pode aceitar dados de RAO usando uma ampla gama
de convenções diferentes, para que se possa entrar com dados RAO em sua forma
original, e simplesmente dizer ao Orcaflex quais convenções aplicar sobre estes dados.
Adicionalmente deve-se notar que:

90
As coordenadas da origem do RAO e a origem da fase.
O sistema utilizado para se definir a direção da onda:
No Orcaflex, 0° quer dizer ondas se aproximando da embarcação de popa, e
90° quer dizer ondas vindo de boreste, mas se uma convenção diferente se aplicar aos
dados a serem utilizados, então deve-se permitir isto ao se entrar com os dados.
O sistema de coordenadas utilizadas para se definir as movimentações das
embarcações e, em particular, qual o sentido positivo. O Orcaflex permite que os dados
de entrada do RAO utilizem uma ampla gama de sistemas, mas todos os resultados do
Orcaflex usam a regra da mão direita, na qual os movimentos positivos são:
a) movimentos rotativos
1) Jogo (Roll) - movimento de oscilação de um bordo para outro - positivo com
boreste para baixo.
Dependendo do estado do mar o balanço alcança valores elevados (p. ex. 40°).
Um balanço rápido demonstra boa estabilidade. O balanço lento, ao contrário, indica
estabilidade deficiente e pode vir a ser extremamente perigoso em mares agitados.

91
2) Caturro (Pitch) - movimento de oscilação vertical no sentido proa-popa -
positivo com a proa para baixo.
Normalmente não atinge valores muito grandes, ficando por volta mais ou
menos 10°. Quando a embarcação neste movimento "fura" uma onda, sofre
considerável esforço em sua estrutura, podendo sofrer avarias sérias.
3) Guinada (Yaw) - movimento de oscilação horizontal no sentido proa-popa -
positivo com proa para bombordo.
Também não atinge valores muito grandes (mais ou menos 5°) e é o menos
perigoso e o menos desconfortável dos movimentos rotativos.

92
b) movimentos lineares
1) Deriva (sway) - Rápido movimento lateral quando com mar de través - positivo para
bombordo.
O deslizamento lateral associado a um forte balanço pode conduzir a um
emborcamento.
2) Avanço (surge) - Rápido movimento para vante (no sentido proa-popa) quando
"descendo" uma onda - positivo adiante.
3) Arfagem (heave) - Rápido movimento para baixo quando caindo no cavalo de uma
onda - positivo para cima
.
Observação: Os movimentos rotativos e lineares apresentados estão sempre associados
e dependem exclusivamente do estado do mar.
Recommended


![TESE DE DOUTORADO · 2020. 3. 11. · FICHA CATALOGRÁFICA CUELLAR, WILLIAM H. CONTROLE HÍBRIDO PARA COMPENSADOR DE HEAVE DE UMA COLUNA DE PERFURAÇÃO [Distrito Federal] 2019. xvi,106p.,](https://img.document.onl/doc/110x75/607421f796c7f25da86a3a42/tese-de-doutorado-2020-3-11-ficha-catalogrfica-cuellar-william-h-controle.jpg)