Embed Size (px)
Citation preview
ANÁLISE DE ESTABILIDADE DE ESTRUTURAS COM ELEMENTOS FINITOS HÍBRIDOS-MISTOS DE TENSÃO
Pedro Filipe Tiago Arruda
Dissertação para obtenção do Grau de Mestre em
Engenharia Civil
Júri
Presidente: Doutor Pedro Guilherme Sampaio Viola Parreira
Orientador: Doutor Luís Manuel Soares dos Santos Castro
Vogais: Doutor Pedro Manuel de Castro Borges Dinis
Outubro de 2009

AGRADECIMENTOS
Agradeço ao Professor Luís de Castro pela possibilidade de desenvolver uma
dissertação sob a sua orientação.
Agradeço ao meu irmão, Mário Arruda, pelo enorme voluntarismo em todo o
processo e as diversas horas gastas na ajuda e compreensão da temática em estudo.
Um especial agradecimento aos meus pais, Vítor Arruda e Maria Tiago Arruda,
pois foi devido à sua exigência, incentivo e estimulo que me permitiram trabalhar para
atingir os objectivos.
Agradeço à instituição IST, nomeadamente ao trabalho de vários docentes
durante o meu Mestrado, bem como aos vários colegas que tive a oportunidade de
conhecer e trabalhar em conjunto.
i
RESUMO:
Neste trabalho é apresentado um modelo de elementos finitos Híbrido-Misto
de Tensão (HMT) para a análise linear de estabilidade de pórticos planos e lajes. Este
modelo foi implementado utilizando polinómios ortonormais de Legendre como
funções de aproximação para os campos de esforços e de deslocamentos. A utilização
deste tipo de funções permite o cálculo dos operadores matriciais do sistema
governativo através da utilização de expressões analíticas e possibilita a adopção de
refinamentos p-hierárquicos muito eficazes.
Demonstra-se que ainda que apesar do sistema governativo inicial dos HMT
não ser idêntico aos dos Elementos Finitos (EF) convencionais, é possível chegar a um
sistema governativo matematicamente semelhante, mas com significado físico
diferente. Desta forma, podem ser aplicadas as técnicas usais para o cálculo de valores
e vectores próprios de estruturas com os modelos HMT.
Assumindo um comportamento fisicamente linear, a solução do problema
pode ser determinada através da realização de uma análise geometricamente não
linear na posição deformada. Para validar o modelo apresentado e para demonstrar as
suas potencialidades, são apresentados e discutidos alguns exemplos numéricos. Os
resultados obtidos são comparados com soluções analíticas e com soluções obtidas
com recurso a outras técnicas numéricas de referência usando EF convencionais.
PALAVRAS-CHAVE
Elementos Finitos
Modelos Híbridos Mistos de Tensão
Análise Linear de Estabilidade
Pórticos Planos, Lajes Espessas
Polinómios de Legendre

ii
ABSTRACT:
This work presents a hybrid mixed stress finite element model for the linear
stability analysis of beams and Reissner-Mindlin plate bending problems. This model is
based on the use of complete sets of orthonormal Legendre polynomials as
approximation functions. The use of this type of functions allows the development of
analytical closed form solutions for the computation of all integrals involved in the
definition of the different structural operators. It enables also the implementation of
highly efficient p- refinement procedures.
Although the governing system may be different from the conventional finite
elements, it is possible to achieve a governing system mathematical identical, but with
different physical meanings. There for the conventional techniques of Eigen values in
structures can be applied with hybrid mixed stress finite elements.
Assuming a physically linear behaviour, the solution of the problem can be
determined by performing a non geometrical analysis in the deformed position. To
validate the model and to illustrate its potential, several numerical tests are presented
and discussed. The results obtained with the hybrid-mixed model are compared with
analytical solutions and with other numerical solutions computed with the classical
displacement finite element formulation.
KEYWORDS
Finite Elements
Hybrid Mixed Stress Models
Linear Stability Analysis
Beams, Reissner-Mindlin Plate Bending problems
Legendre Polynomials
iii
NOTAÇÃO Letras Latinas Minúsculas b – Forças de massa. e – Deformações generalizadas. f – Matriz que reúne os parâmetros elásticos - formato de flexibilidade. h – espessura da laje. mx – Momento flector de laje ao longo do x. my – Momento flector de laje ao longo do y. mxy – Momento torsor de laje ao longo de x e y . mρ – Matriz de massa do elemento infinitesimal. n – Normal exterior unitária à fronteira. qV – Pesos da aproximação dos deslocamentos generalizados no domínio. qΓ – Pesos da aproximação dos deslocamentos generalizados na fronteira. s – Esforços independentes no domínio. t – Forças na fronteira. u – Campo de deslocamentos do elemento. u – Deslocamento longitudinal de barra. uΓ – Deslocamento de fronteira generalizado.
u – Deslocamento longitudinal nodal de barra.
Γu – Operador dos deslocamentos de fronteira. uV – Campos de deslocamentos no domínio do elemento. uΓ – Campos de deslocamentos na fronteira do elemento. vx – Esforço transverso de laje ao longo de x. vy – Esforço transverso de laje ao longo de y. w – Deslocamento transversal de barra.
w – Deslocamento transversal de fronteira. Letras Latinas Maiúsculas A – Área da secção. Ac – Área de corte da secção. AV – Operador de compatibilidade no domínio. AΓ – Operador de compatibilidade na fronteira. D – Operador diferencial de equilíbrio. D* – Operador diferencia de compatibilidade. E – Módulo de elasticidade. Ee – Operador de flexibilidade linear. F – Operador de flexibilidade generalizado. Fi – Forças nodais de barra. N – Matriz das normais exteriores à fronteira. QV – Forças de massa generalizadas. QΓ – Forças de fronteira generalizadas. Pi(x) – Polinómio de Legendre de grau i. S – Função aproximação dos campos de esforços no domínio.
iv
T – Matriz dos cosenos directores. UV – Funções de aproximação dos campos de deslocamentos no domínio do elemento. UΓ – Funções de aproximação dos campos de deslocamentos na fronteira do elemento. V – Domínio do elemento. X – Pesos das aproximações dos campos de esforços no domínio. Letras Gregas Minúsculas α – Ângulo de rotação da barra. γ – Distorção. ε – Deformação. ζ – Coeficiente de proporcionalidade de amortecimento. θ – Rotação. λ – Coeficiente de normalização dos polinómios de Legendre. ς – Referencial de fronteira do elemento. σ – Tensão. υ – Coeficiente de poisson. χ – Curvatura. Letras Gregas Maiúsculas Γ – Fronteira do elemento. Γσ – Fronteira estática do elemento. Γu – Fronteira cinemática do elemento.. Φ – Coeficiente de Corte. Φn – Vector próprio normalizado do modo de vibração n. Abreviaturas EF – Elementos Finitos. HMT – Híbridos Mistos de Tensão.

1
Índice
1 INTRODUÇÃO ................................................................................................................................... 3
1.1 CONSIDERAÇÕES INICIAIS ...................................................................................................................... 3
1.2 OBJECTIVOS ....................................................................................................................................... 5
1.3 ORGANIZAÇÃO DO TRABALHO ................................................................................................................ 5
2 FORMULAÇÃO DO PROBLEMA PARA ANÁLISES LINEARES ................................................................ 6
2.1 RELAÇÕES FUNDAMENTAIS EM PROBLEMAS DE ELASTICIDADE ...................................................................... 6
2.2 ELEMENTO BARRA ............................................................................................................................... 6
2.3 ELEMENTO DE LAJE .............................................................................................................................. 8
2.4 MODELOS DE ELEMENTOS FINITOS HÍBRIDOS MISTOS DE TENSÃO ................................................................ 9
3 FORMULAÇÃO DO PROBLEMA PARA ANÁLISES GEOMETRICAMENTE NÃO LINEARES .................... 13
3.1 ANÁLISE LINEARIZADAS ....................................................................................................................... 13
3.2 EFEITOS GEOMETRICAMENTE NÃO LINEARES EM BARRAS .......................................................................... 13
3.2.1 No Domínio ..................................................................................................................... 13
3.2.2 Na Fronteira ................................................................................................................... 15
3.3 ANÁLISE DOS EFEITOS GEOMETRICAMENTE NÃO LINEARES EM BARRAS COM MODELOS CONVENCIONAIS DE EF .. 16
3.4 ANÁLISE DOS EFEITOS GEOMETRICAMENTE NÃO LINEARES EM BARRAS COM MODELOS HMT ......................... 17
3.4.1 Matriz Gv2 ...................................................................................................................... 19
3.4.2 Matriz Gv3 ...................................................................................................................... 20
3.4.3 Determinação de cargas críticas .................................................................................... 20
3.5 EFEITOS GEOMETRICAMENTE NÃO LINEARES EM PLACAS .......................................................................... 21
3.6 ANÁLISE DOS EFEITOS GEOMETRICAMENTE NÃO LINEARES EM PLACAS COM MODELOS CONVENCIONAIS DE EF .. 23
3.7 ANÁLISE DOS EFEITOS GEOMETRICAMENTE NÃO LINEARES EM PLACAS COM MODELOS HMT .......................... 23
4 ANÁLISE DE PÓRTICOS PLANOS ...................................................................................................... 25
4.1 COLUNA SIMPLESMENTE APOIADA SEM DEFORMABILIDADE POR CORTE ....................................................... 25
4.2 COLUNA EM CONSOLA COM DEFORMABILIDADE POR CORTE ...................................................................... 28
4.3 SENSIBILIDADE AO SHEAR LOCKING ....................................................................................................... 30
4.4 TESTES NUMÉRICOS ........................................................................................................................... 30
4.4.1 Coluna em Consola ......................................................................................................... 31
4.4.2 Coluna Bi-Encastrada ..................................................................................................... 32
4.4.3 Coluna Encastrada-Apoiada ........................................................................................... 33
4.4.4 Pórtico em L .................................................................................................................... 34
4.5 ESFORÇOS GEOMETRICAMENTE NÃO LINEARES ....................................................................................... 35
4.5.1 Coluna Simplesmente Apoiada ....................................................................................... 35
4.5.2 Coluna em Consola ......................................................................................................... 37
4.5.3 Pórtico quadrado irregular ............................................................................................. 39
5 ANÁLISE DE PLACAS ........................................................................................................................ 42
5.1 PLACA SIMPLESMENTE APOIADA .......................................................................................................... 42
5.2 LAJE SIMPLESMENTE APOIADA COM DEFORMABILIDADE POR CORTE ........................................................... 45
5.3 TESTES NUMÉRICOS ........................................................................................................................... 46
5.3.1 Placa Simplesmente Apoiada ......................................................................................... 46
5.3.2 Placa Encastrada ............................................................................................................ 48
5.3.3 Placa Simplesmente Apoiada com Bordo Livre .............................................................. 49
2
5.3.4 Placa Simplesmente Apoiada Carregada por Tensões de Corte ..................................... 50
5.3.5 Placa Rectangular Simplesmente Apoiada ..................................................................... 51
5.3.6 Placa Simplesmente Apoiada ......................................................................................... 52
6 CONCLUSÕES .................................................................................................................................. 55
BIBLIOGRAFIA ...................................................................................................................................... 57
ANEXO A .............................................................................................................................................. 58
A.1 – SISTEMA GOVERNATIVO DOS HMT PARA PÓRTICOS PLANOS ..................................................................... 58
A.2 – SISTEMA GOVERNATIVO DOS HMT PARA LAJES ...................................................................................... 64
ANEXO B .............................................................................................................................................. 68
B.1 – POLINÓMIOS DE LEGENDRE ................................................................................................................. 68
B.1.2 – CONSIDERAÇÕES INICIAIS ................................................................................................................. 68
B.1.3 – PROPRIEDADES DOS POLINÓMIOS DE LEGENDRE ................................................................................... 68
B.1.4 – FORMULAS GERADORAS DOS POLINÓMIOS DE LEGENDRE ....................................................................... 68
B.1.5 – EXPRESSÕES PARA INTEGRAÇÕES ANALÍTICAS ....................................................................................... 70
ANEXO C .............................................................................................................................................. 73
C.1 – FORMULAS E TEOREMAS ..................................................................................................................... 73
C.1.1 – DIVERGÊNCIA DE UM CAMPO VECTORIAL ............................................................................................ 73
C.1.2 – TEOREMA DA DIVERGÊNCIA .............................................................................................................. 73
C.1.3 – MUDANÇA DE REFERENCIAL ............................................................................................................. 73
ANEXO D .............................................................................................................................................. 74
D.1 – ELEMENTOS CONVENCIONAIS .............................................................................................................. 74
D.1.1 – PÓRTICOS ..................................................................................................................................... 74
D.1.2 – PLACAS ........................................................................................................................................ 74

3
1 Introdução
1.1 Considerações Iniciais
A formulação clássica de Elementos Finitos (EF) [16] é ainda, nos dias de hoje, a
ferramenta de cálculo numérico mais usada no mundo profissional de projecto. Isto deve-se à
robustez matemática da formulação e ao facto das equações do sistema governativo serem
bastante intuitivas, visto se poderem comparar com as do “Método dos Deslocamentos” [5].
Nas formulações não convencionais [16], o sistema governativo não apresenta a priori
nenhuma semelhança com a equação de rigidez, nem qualquer significado físico imediato. Em
todo caso é possível usando a formulação não clássica chegar a uma equação
matematicamente idêntica à do “Método dos Deslocamentos”, mas significado físico diferente
usando uma condensação matricial, sendo esse um dos objectivos deste trabalho.
A razão para o estudo dos modelos Híbridos Mistos de Tensão (HMT) deve-se ao facto
de se tentar ultrapassar as dificuldades dos modelos de EF convencionais [3], que são:
- A soluções obtidas satisfazem apenas as condições de compatibilidade, não se
verificando localmente as condições de equilíbrio quer no domínio, quer na fronteira estática,
quer ao longo da fronteira inter-elementar.
- A qualidade dos resultados depende fortemente da discretização adoptada, o que
implica a utilização de geradores de malhas.
- A discretização da malha depende das condições fronteira e do tipo de
carregamentos.
- Em fenómenos de fendilhação os modelos tendem a ser complexos visto ser
necessário introduzir descontinuidades no campo de deslocamentos.
Ao contrário, os modelos Híbridos Mistos de Tensão possuem as seguintes vantagens
[7,9]:
- O uso de macroelementos permite evitar o uso de geradores de malhas, uma vez que
a discretização se baseia na utilização de macroelementos e onde se necessita apenas de
refinar mais a malha se a geometria da estrutura for mais complexa.
- A distorção dos macroelementos não diminui a qualidade da solução obtida.
- Uma escolha apropriada para os graus de aproximação dos diferentes campos
permite obter soluções “quasi-equilibradas”, com as vantagens que daí decorrem de um ponto
de vista de dimensionamento estrutural.
- Se as funções de aproximação forem ortogonais, tais como se tem no caso dos
polinómios de Legendre, então o sistema governativo pode ser bastante esparso o que
permite a adopção de algoritmos altamente eficazes para o armazenamento e o tratamento
deste tipo de sistemas.
4
- Quando aplicados na análise de lajes de Reissner-Mindlin, os modelos HMT não são
sensíveis ao fenómeno do Shear Locking [3].
- Quando se efectuam análises fisicamente não lineares, estas geralmente evoluem
com base no valor do campo de tensões. Desta forma e tendo em conta que os modelos HMT
permitem a obtenção de uma aproximação bastante precisa para os campos estáticos, é
possível obter modelos robustos e computacionalmente muito competitivos para a análise
deste tipo de problemas.
- O refinamento do tipo p é mais fácil de implementar do que no caso dos EF
convencionais.
Em anos recentes têm vindo a ser desenvolvidos modelos híbridos-mistos de tensão
para a análise estática de estruturas laminares planas, placas e lajes [1,6,7]. Uma das
vantagens associadas à utilização deste tipo de formulação reside na flexibilidade que
possibilita na escolha das funções de aproximação a considerar. Esta característica permite
que sejam considerados conjuntos de funções com propriedades especiais e cuja utilização
não é possível caso se adopte a clássica formulação de deslocamento do método dos
elementos finitos. São exemplos destas funções os monómios, os polinómios ortogonais de
Legendre [7,9] e os sistemas de wavelets [4].
O modelo aqui apresentado diz-se híbrido pelo facto de se aproximar de forma
independente o campo de tensões no domínio e o campo de deslocamentos na fronteira
estática (onde se consideram incluídas as fronteiras inter-elementares), e misto por se
aproximarem simultaneamente o campo de tensões e de deslocamentos no domínio. Todas as
condições fundamentais do problema são impostas ponderadamente na forma de resíduos
pesados.
O modelo diz-se de tensão tendo em conta a forma como são tratadas no domínio as
condições de equilíbrio e de compatibilidade e porque a ligação entre elementos é efectuada
através da imposição ponderada das condições de equilíbrio na fronteira. As ponderações
acima referidas podem ser efectuadas por forma a que a solução obtida possa verificar
localmente as condições de equilíbrio no domínio e/ou na fronteira.
Como não é necessário verificar a priori nenhuma das condições fundamentais do
problema, há uma grande liberdade na escolha das funções de aproximação a utilizar. São
utilizados neste trabalho polinómios ortonormais de Legendre. A exploração das propriedades
destas funções permite a definição de soluções analíticas para todos os operadores estruturais
envolvidos na definição do sistema governativo da estrutura. Evita-se desta forma o recurso a
quaisquer esquemas de integração numérica em análises lineares. Por outro lado, a
estabilidade numérica associada à consideração de polinómios ortonormais de Legendre
permite a utilização de graus elevados na definição da aproximação. Este facto possibilita que
se definam malhas de macro-elementos onde o refinamento da solução se consegue através
da consideração de processos p-adaptativos altamente eficazes. Uma apresentação detalhada
destas funções e dos algoritmos que permitem o cálculo analítico dos integrais pode ser
encontrada em [8].
5
1.2 Objectivos
Os primeiros estudos envolvendo modelos HMT consistiram em análises fisicamente e
geometricamente lineares [9]. Prosseguiu-se de seguida para as análises estáticas fisicamente
não lineares [4] e observou-se uma grande vantagem em relação aos EF convencionais visto se
aproximar o campo dos esforços nos modelos HMT. Assim, e tendo em conta os excelentes
resultados obtidos com os estudos anteriormente desenvolvidos, este é o primeiro trabalho
onde se generalizam os modelos híbridos-mistos de tensão por forma a ser possível a
consideração de efeitos geometricamente não lineares e o cálculo de cargas críticas e modos
de encurvadura através da realização de análises lineares de estabilidade.
O modelo discutido neste trabalho permite realizar análises geometricamente não
lineares para a determinação de cargas críticas em pórticos planos e lajes. É executada uma
análises linear de estabilidade para o cálculo de esforços e cargas críticas, o que significa que
todos os efeitos geometricamente não lineares se encontram “linearizados”.
São apresentadas três hipóteses para a determinação da matriz geométrica associada
aos modelos HMT, onde uma delas envolve a possibilidade da determinação de cargas críticas
com deformabilidade por corte. Foi implementado um programa de cálculo automático em
Matlab [17] para a determinação de cargas críticas e esforços geometricamente não lineares
para pórticos planos. Este permite a determinação dos modos de encurvadura , os diagramas
de esforços e deformadas para os esforços lineares e não lineares e ainda a determinação das
cargas criticas. Para as lajes foi modificado um programa já existente, onde se adicionaram as
respectivas matrizes geométricas e rotinas extra para o cálculo de modos de encurvadura e
respectivas tensões críticas.
Para validar os resultados usaram-se EF convencionais, através do recurso a um
programa comercial SAP2000 [10].
1.3 Organização do Trabalho
No capítulo 2 é apresentada a formulação do problema, tanto para o elemento de barra como
para o elemento de laje. É também formulada a aproximação do modelo HMT para análises
lineares estáticas. No capítulo 3 são formuladas as matrizes geométricas para as análises
geometricamente não lineares, tanto para os EF como para os modelos HMT para os
elementos barra e laje. No capítulo 4 e 5 são executados vários testes para ilustração, e
validação do desempenho dos modelos numéricos apresentados. Para finalizar, no capítulo 6
são apresentadas as conclusões finais e perspectivados desenvolvimentos futuros.
Para que o leitor se familiarize com o sistema governativo dos modelos HMT, este é
apresentado no Anexo A para os pórticos planos. Para as lajes apenas são apresentadas as
matrizes geométricas, estando o sistema governativo detalhado em [8]. No Anexo B é feita
uma introdução aos polinómios de Legendre e seus respectivos integrais, e no Anexo C são
apresentados alguns teoremas matemáticos usados neste trabalho.
6
2 Formulação do Problema para Análises Lineares
2.1 Relações Fundamentais em Problemas de Elasticidade
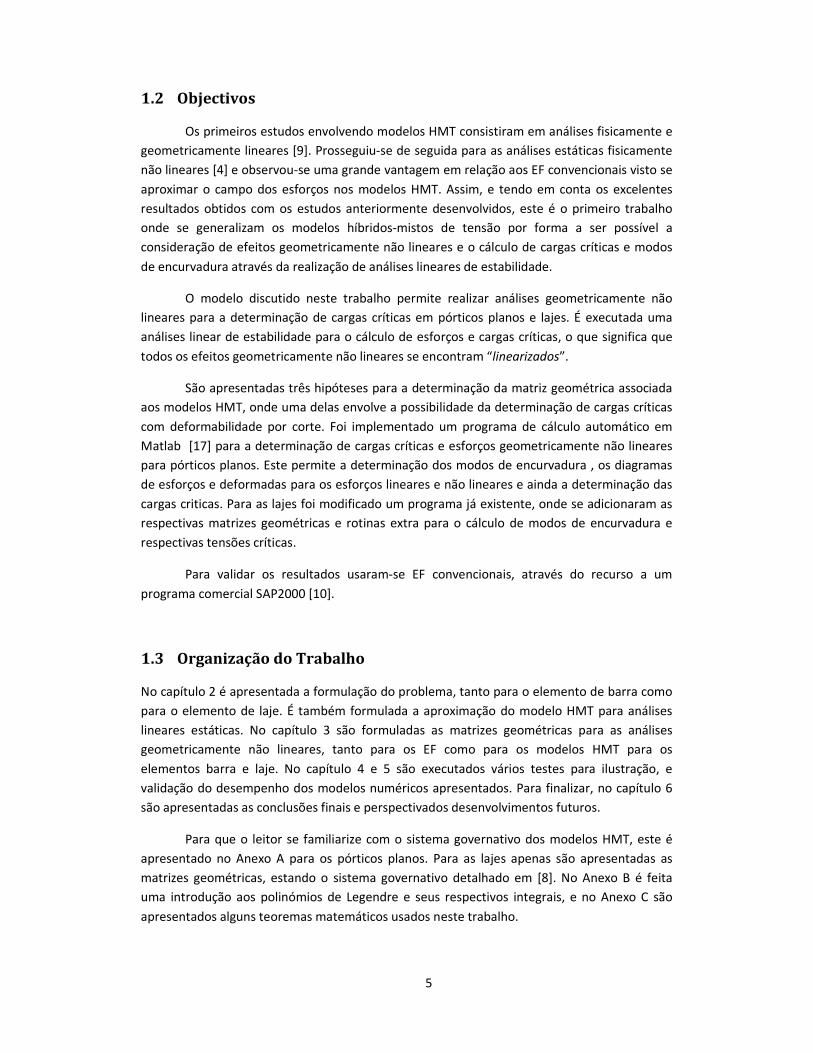
De acordo com a mecânica dos meio contínuos, as grandezas físicas num corpo
elástico linear e as grandezas que as relacionam podem ser representadas através do diagrama
apresentado na Figura 2-1.
Figura 2-1 – Diagrama com identificação das grandezas físicas envolvidas na análise estrutural.
As condições de equilíbrio, compatibilidade e as relações constitutivas que regem este
problema podem ser expressas do seguinte modo [11]:
Equilíbrio Domínio:
�� � � � 0 (2.1)
Equilíbrio Fronteira:
�� � � � à (2.2)
Elasticidade Linear:
� �� (2.3)
Compatibilidade no Domínio:
� ��� (2.4)
Compatibilidade na Fronteira:
� � �Г � Г� (2.5)
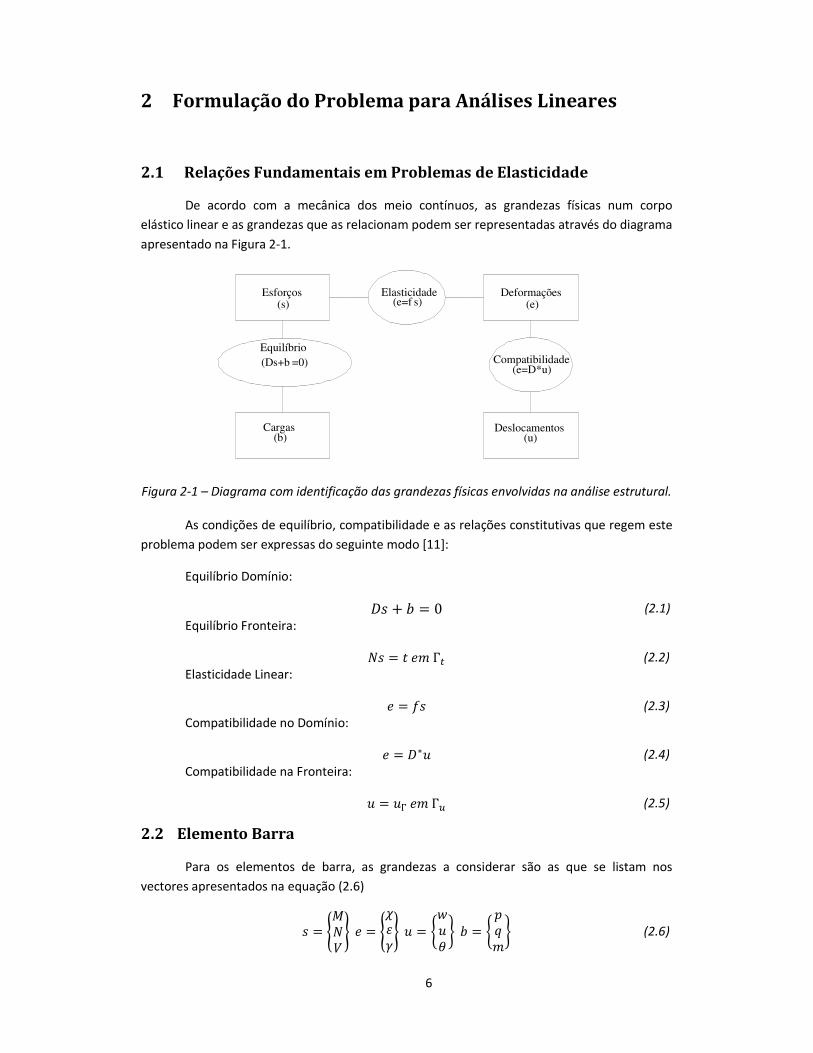
2.2 Elemento Barra
Para os elementos de barra, as grandezas a considerar são as que se listam nos
vectores apresentados na equação (2.6)
� � ����� � ����� � � ����� � � ����� (2.6)
CompatibilidadeEquilíbrio
Cargas
Esforços(s)
Deformações(e)(e=f s)
Elasticidade
(Ds+b(e=D*u)
(b)Deslocamentos
(u)
=0)

7
O operador diferencial de equilíbrio D em análises lineares é dado por:
� � !!!!" 0 0 ##$0 ##$ 0##$ 0 %1'(
((() (2.7)
O operador diferencial de compatibilidade D*, e a matriz de flexibilidade infinitesimal f, são dados por:
�� � !!!!" 0 0 ##$0 ##$ 0##$ 0 1 '(
((() � �
!!!!" 1,- 0 00 1,. 00 0 1/.0'(
((() (2.8)
A matriz com as componentes da normal exterior à fronteira �112, e os vectores que
reúnem as forças prescritas ao longo da fronteira estática t, e os deslocamentos impostos na
fronteira cinemática uΓ, são dados por:
�1126 � 7 0 0 %10 %1 0%1 0 0 8 �1129 � 70 0 10 1 01 0 08 �6 � �:;:<:=� �9 � �:>:?:@� �à � ��A�B�C � (2.9)
O eixo da barra pode rodar em torno do plano, pelo que é necessário ter em conta a
relação entre os referenciais local e global, tal como se encontra representado de forma
esquemática na Figura 2.2. Assim sendo, é necessário projectar as forças com as mesmas
direcções dos deslocamentos independentes, de acordo com (2.10).
�112D� � � � Г (2.10)
D � 7EF� G %�HI G 0�HI G EF� G 00 0 18 (2.11)
Figura 2-2 – Elemento barra.
F2F1
F3
F5
F4
F6
x
w
uq
m
p
q
a

8
Nas definições anteriores, (M,N,V) representam o momento flector, esforço axial e
esforço transverso ao longo da barra e (w,u,θ) o deslocamento transversal, longitudinal e
rotação ao longo da barra. Também ao longo da barra são definidas as componentes de
deformação associadas a cada um dos esforços: curvatura, extensão e distorção (χ,ε,γ). O
vector b define o carregamento transversal, longitudinal e os momentos distribuídos ao longo
do eixo da barra. As propriedades mecânicas do material são definidas através do módulo de
elasticidade E, do coeficiente de poisson υ e área reduzida de corte , .0.
2.3 Elemento de Laje
Figura 2-3 – Laje de Reissner-Mindlin.
No caso das lajes de Reissner-Mindlin, os campos de esforços, de deformações, de
deslocamentos e as forças actuantes no domínio podem ser agrupados nos seguintes vectores
[12]:
� �XYZY[ �\�]�\]^\^] _Y
Ya �XYZY[ �\�]�\]�\�] _Y
Ya � � ��\�]�� � � ��;�<� � (2.12)
Os operadores diferenciais de equilíbrio D e de compatibilidade no domínio D* são
agora dados por [12]:
� � !!!!!" bb$ 0 bbc %1 00 bbc bb$ 0 %10 0 0 bb$ bbc'((
((() �� �
!!!!!!!!!" bb$ 0 00 bbc 0bbc bb$ 01 0 bb$0 1 bbc'(
(((((((() (2.13)
x
buG
Gs
y
V
x
y
m
m
mm
m
m
m
m
v
v
v
v
x
x
x
x
y
y
y
y
xy
xy
xyxy
xydx
dy
dx
dx
dy
dy
x
x
xm
vx
xym
vyxym
ym
yy
++
+
+
+
+

9
A matriz de flexibilidade infinitesimal, f, é dada por [12]:
� � 12,e= !!!!!!" 1 %f 0 0 0%f 1 0 0 00 0 2(1 � f) 0 00 0 0 (1 � f)e<6h 0
0 0 0 0 (1 � f)e<6h '(((((() (2.14)
A matriz com as componentes da normal unitária exterior à fronteira, �112, e os vectores
que reúnem as forças prescritas ao longo da fronteira estática t, e os deslocamentos impostos
na fronteira cinemática uΓ, são dados por [12];
�112 � i\ 0 ] 0 00 ] \ 0 00 0 0 \ ]j � � ��k� ^ � �à � l�Ck�C �A m (2.15)
Nas definições anteriores, w e θx{y} representam o deslocamento transversal e a
rotação ao longo de x{y}, γx{y} a distorção no plano (x,z){(y,z)}, χx{y} a curvatura de flexão ao
longo de x{y}, χxy a curvatura de torção, mx{y} o momento flector ao longo de x{y} e mxy, o
momento torsor. As características mecânicas são: o módulo de elasticidade E, o coeficiente
de poisson υ e o factor de corte, h. Em relação ás características geométricas, h corresponde a
espessura da laje.
2.4 Modelos de Elementos Finitos Híbridos Mistos de Tensão
Começa-se por definir o sistema governativo para análises lineares, para poder
generalizar os modelos HMT tanto para as barras como para as lajes.
A formulação de elementos finitos híbrida-mista de tensão (HMT) utilizada neste
trabalho considera duas aproximações distintas e independentes para o campo de esforços e
para o campo dos deslocamentos no domínio, expressas por:
� � tu (2.16)
�v � wv�v (2.17)
As matrizes S e UV reúnem as funções de aproximação no domínio. Os vectores X e qV
listam os pesos das funções de aproximação, os quais constituem as incógnitas do problema. A
estas funções impõe-se apenas, como única restrição, formarem uma base completa e serem
integráveis no domínio.
Na fronteira estática (a qual inclui também as fronteiras entre elementos), é também
aproximada de forma independente o campo de deslocamentos. Define-se desta forma:
�à � w�à (2.18)

10
A matriz UΓ lista as funções de aproximação do campo de deslocamentos na fronteira
estática e o vector qΓ os pesos correspondentes. A representação das matrizes S, UV, UΓ e qΓ, encontram-se no Anexo A para os pórticos planos.
Recorrendo ao método de Galerkin e utilizando como funções de peso as funções de
aproximação do campo dos deslocamentos no domínio, a equação de equilíbrio (2.1) é
estabelecida de uma forma fraca segundo:
|wv (�� � �)#� � 0 (2.19)
|wv �� #� � % |wv �#� (2.20)
|wv �t #�u � % |wv �#� (2.21)
A equação de equilíbrio no domínio pode ser reescrita na forma:
.v u � %}� (2.22)
com:
.v � |wv �t #� (2.23)
}v � |wv �#� (2.24)
A condição de equilíbrio na fronteira é imposta ponderadamente na forma de resíduos
pesados, através da equação (2.25).
| wГ� (�� % �)#Г~ � 0 (2.25)
É possível agora verificar que:
|wГ� �� #Г~ � |wГ� � #Г~ (2.26)
| wГ� (�t) #Г~u � | wГ� � #Г~ (2.27)
A equação de equilíbrio na fronteira no modelo discreto pode ser expressa na forma:
.Г�u � }Г (2.28)
com:
.Г� � |wГ� (�t)#Г~ (2.29)

11
}Г � |wГ� � #Г~ (2.30)
A imposição ponderada das relações de elasticidade é dada pelas seguintes igualdades:
|t ( % ��)#� � 0 (2.31)
o que resulta em:
|t #� � |t �� #� (2.32)
|t #� � |t � t #� u (2.33)
Tendo em conta (2.33), as relações de elasticidade no modelo discreto podem ser
escritas na forma: ,� � :u (2.34)
com
,� � |t #� (2.35)
: � |t � t #� (2.36)
A ponderação da condição de compatibilidade no domínio é dada pelas seguintes
igualdades:
|t ( % ���)#� � 0 (2.37)
|t #� � |t ��� #� (2.38)
A utilização do teorema da divergência permite escrever:
|t #� � %|(�t) � #� � |(�t) � #� � |(�t) � #����������������������������������� ���� � �v
(2.39)
|t #� � %|(�t) w�#� qV � |(�t) wГ#Г� qГ � |(�t) �Г#Г� (2.40)
As condições de compatibilidade no domínio assumem o seguinte formato:
,� � %.v�v � .�à � �Bà (2.41)
com
�BГ � |(�t) �Г#Г� (2.42)
Combinando as equação (2.36) com a (2.41) é possível obter o seguinte sistema
governativo elementar:

12
i : %.Г .v%.Г 0 0.v 0 0 j � � u�Г�v� � � �BГ%}Г%}v� (2.43)
O sistema governativo global tem uma estrutura muito semelhante ao do sistema
governativo elementar e resulta de um processo de espalhamento directo, apresentado de
forma detalhada no Anexo A. A ligação entre elementos é efectuada através da imposição de
uma mesma aproximação para o campo de deslocamentos na fronteira comum a esses
elementos.
Para se obter um sistema de equações com um formato idêntico ao que é obtido com
recurso à formulação clássica do método dos elementos finitos, pode efectuar-se uma
condensação matricial do sistema governativo. Para tal, escreve-se primeiro o sistema
governativo (2.43) na forma:
� :B .C.C 0� � � uB�v� � � }B%}v� (2.44)
com
:B � � : %.�%.� 0 � .C � �.v0 � }B � � �B�%}�� uB � �u��� (2.45)
É então possível obter:
�:BuB � .C�v � }B.C uB � %}v � � � uB � :B�;}B % :B�;.C�v.C (:B�;}B % :B�;.C�v) � %}v � (2.46)
O formato condensado do sistema governativo global vem então dado por:
� ���{�v} � {}} (2.47)
com:
� ��� � .C :B�;.C } � .C :B�;}B � }v (2.48)
Esta equação é formalmente idêntica à do modelo de deslocamento do métodos dos
EF, ou seja, é possível usar os algoritmos de resolução utilizados nas formulações
convencionais. Em todo caso o seu significado físico é completamente diferente, isto porque as
incógnitas qV são apenas pesos das funções aproximação, sem qualquer significado físico
imediato em relação ao elemento finito.

13
3 Formulação do Problema para Análises Geometricamente não Lineares
3.1 Análise Linearizadas
De acordo com [14], para determinar uma carga crítica é apenas necessário usar uma
análise linear de estabilidade com apenas alguns efeitos geometricamente não lineares. Esses
efeitos geometricamente não lineares em análises lineares de estabilidade podem ser
contabilizados escrevendo o equilíbrio na configuração deformada ou considerando
deformações não lineares na relação constitutiva usando o principio da estacionaridade da
energia potencial. Caso se use os dois ao mesmo tempo já se está a sair dos efeitos
linearizados de estabilidade e perdem-se as vantagens associadas ao cálculo linear na
determinação das cargas críticas.
Apesar dos enormes progressos feitos nas análises geometricamente exactas, neste
trabalho essas ideias não foram tidas em conta por dois motivos: primeiro porque não existe
necessidade de se usarem teorias geometricamente exactas na determinação de cargas
críticas, e depois porque no âmbito das aplicações na área da engenharia civil se verifica que
os deslocamentos de 2ª ordem em estruturas correntes são relativamente pequenos.
Existem várias formas alternativas para contabilizar os efeitos geometricamente não
lineares. Pode por exemplo usar-se o princípio da minimização da energia potencial [14], ou
podem escrever-se as condições de equilíbrio na posição deformada, deixando as deformações
sempre lineares [13]. Esta última é a alternativa adoptada no desenvolvimento deste trabalho.
3.2 Efeitos Geometricamente Não Lineares em Barras
3.2.1 No Domínio
Observando a Figura 3-1 e estabelecendo as condições de equilíbrio num troço
infinitesimal da barra, é possível obter as equações (3.1)
Figura 3-1 – Equilíbrio no domínio na posição deformada.
F2
F1
F3
F5
F4
F6
xw
uq
q
H
T
M
T+dT
H+dH
M+dM
q(x)
ww+dw
dx
p
m
p(x)
m(x)

14
XYZY[�:v � D % D % #D % �#$ � 0 �:� � %� � � � #� � �#$ � 0 �� � %(D � #D)#$ � (� � #�)#� % � � � � #� % �#$<2 � � � 0
� (3.1)
Desprezando os infinitésimos de ordem superior, é possível escrever:
XYZY[#D#$ � � � 0#�#$ � � � 0#�#$ % D � � #�#$ � � � 0
� (3.2)
Estas são as equações de equilíbrio para barras sem deformabilidade por corte, onde a
orientação dos eixos de esforço transverso é sempre perpendicular ao eixo na posição
indeformada da barra.
Caso se pretenda contabilizar a carga crítica incluindo o efeito da deformabilidade por
corte, é importante orientar os eixos na posição deformada. Admitiu-se os eixos dos esforços
na posição deformada perpendicular às fibras na posição deformada em relação ao ângulo α�dw/dx, em conformidade com [13].
Figura 3-2 – Rotação dos eixos na posição deformada.
D � �EF�(G) � ��HI(G) ¢ � � �G (3.3)
� � %��HI(G) � �EF�(G) ¢ %�G � � (3.4)
Rescreve-se assim a equação (3.2) da seguinte maneira:
XYZY[ �v�\ � ��\ £� �¤�\¥ � � � 0�¦�\ % ��\ £� �¤�\¥ � � � 0�§�\ % (� � �G) � (%�G � �) �¤�\ � � � 0 �
XYZY[ �v�\ � ��\ £� �¤�\¥ � � � 0�¦�\ % � �¨¤�\¨ % �v�\ �¤�\ � � � 0
�§�\ % � % � £�¤�\¥< � � � 0�� (3.5)
Como foi indicado anteriormente, desprezam-se sempre os termos de ordem
quadrática:
© � ª#�#$«< ¬ 0 (3.6)
T
H
NV
a

15
Para a determinação de cargas críticas com uma análise linear de estabilidade, apenas
se admite que o esforço axial possa provocar efeitos de 2ª ordem. Assim sendo, desprezam-se
todas as parcelas do esforço transverso que possam produzir efeitos geometricamente não
lineares, o que resulta em:
©XYZY[ #�#$ � ##$ ª� #�#$« � � � 0#�#$ � � � 0#�#$ % � � � � 0
� (3.7)
Rescreve-se assim a equação (2.1) com as parcelas geometricamente não lineares,
definindo o seguinte operador:
� � ® ##$ ª� ##$« 0 00 0 00 0 0¯ (3.8)
�� � � � v� � 0 (3.9)
3.2.2 Na Fronteira
Também é necessário usar impor a rotação dos eixos com a posição deformada na
fronteira,
:; � %�° EF�(G) % �° �HI(G) ¬ %�° % �°G:< � �° �HI(G) % �° EF�(G) ¬ �°G % �°:= � %�° (3.10)
:> � �± EF�(G) � �± �HI(G) ¬ �± � �±G:? � %�± �HI(G) � �± EF�(G) ¬ %�±G � �±:@ � �± (3.11)
Figura 3-3 – Equilíbrio na fronteira na posição deformada.
F2
F1
F3
F5
F4
F6
V0
N0
M0
ML
NL
VL
16
!!!!"
0 0 %10 %1 0%1 0 00 0 10 1 01 0 0 '(((() �
!!!!"�° �°�°�± �±�± '((
(() � !!!!"%�° 0 00 0 00 0 0�± 0 00 0 00 0 0'((
(() !!!!"G° �°�°G± �±�± '((
(() � !!!!":; :<:=:> :?:@ '((
(() (3.12)
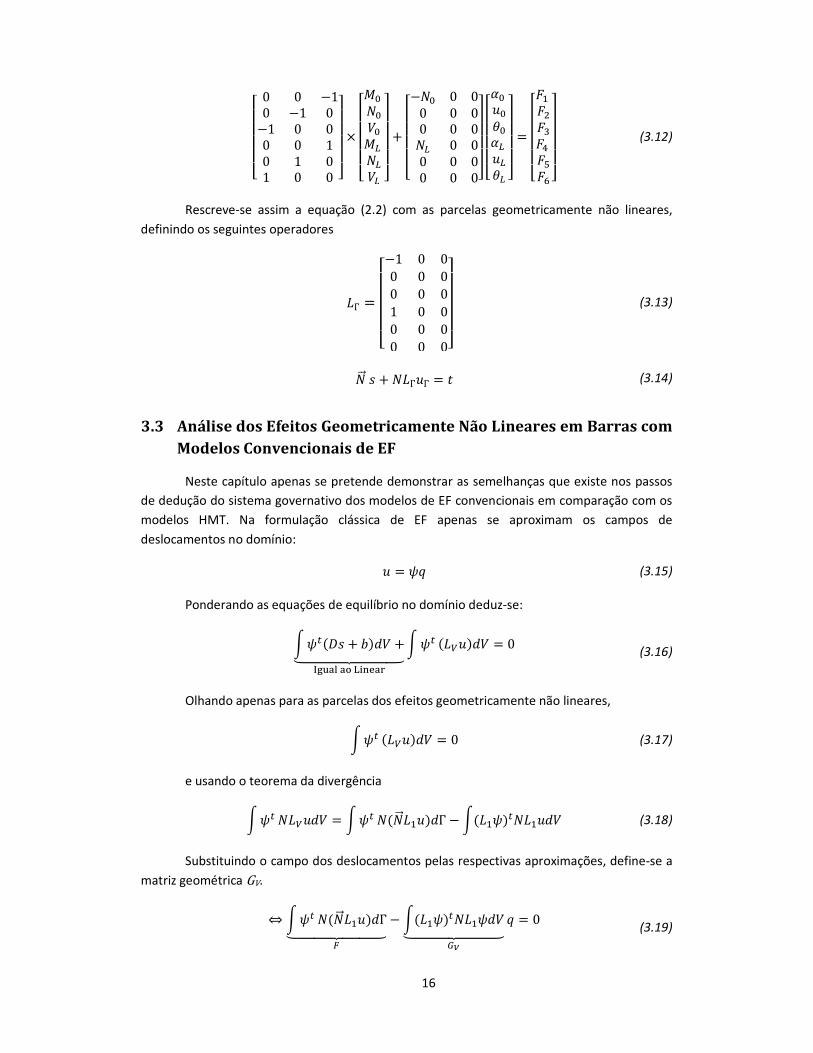
Rescreve-se assim a equação (2.2) com as parcelas geometricamente não lineares,
definindo os seguintes operadores
Г � !!!!"%1 0 00 0 00 0 01 0 00 0 00 0 0'(
((() (3.13)
�112 � � ��à � � (3.14)
3.3 Análise dos Efeitos Geometricamente Não Lineares em Barras com Modelos Convencionais de EF
Neste capítulo apenas se pretende demonstrar as semelhanças que existe nos passos
de dedução do sistema governativo dos modelos de EF convencionais em comparação com os
modelos HMT. Na formulação clássica de EF apenas se aproximam os campos de
deslocamentos no domínio:
� � ²� (3.15)
Ponderando as equações de equilíbrio no domínio deduz-se:
|² (�� � �)#� ��������������I´µ¶· ¶¸ Lº»¼¶½
| ² (v�)#� � 0 (3.16)
Olhando apenas para as parcelas dos efeitos geometricamente não lineares,
|² (v�)#� � 0 (3.17)
e usando o teorema da divergência
|² �v�#� � |² �(�112;�)#Г % |(;²) �;�#� (3.18)
Substituindo o campo dos deslocamentos pelas respectivas aproximações, define-se a
matriz geométrica GV.
� |² �(�112;�)#Г�����������¿
% |(;²) �;²#������������ÀÁ� � 0
(3.19)

17
Adicionando os termos da análise linear chega-se à equação de equilíbrio (3.20).
Acontece que nos EF convencionais a parcela denotada em (3.19) por F desaparece quando o
sistema governativo global é construído, visto estas serem formulações compatíveis que
asseguram a continuidade do campo de deslocamentos ao longo das fronteiras cinemáticas e
fronteiras inter-elementares [3].
(� � /v)� � } (3.20)
3.4 Análise dos Efeitos Geometricamente Não Lineares em Barras com Modelos HMT
Para os modelos HMT vão ser propostos três formatos alternativos para a matriz
geométrica, onde cada um parte de uma hipótese diferente de cálculo. A matriz GV1 parte dos
mesmos pressupostos dos adoptados para a dedução da matriz geométrica com elementos
finitos convencionais.
Ponderando as equações de equilíbrio no domínio, deduz-se que:
| w�� (�� � � � ��)#� � 0 (3.21)
Usando os mesmos passos dos elementos finitos convencionais, que envolve o uso do
teorema da divergência na parcela geometricamente não linear, define-se a matriz geométrica GV1 para os HMT. Desenvolvendo a equação (3.25), obtém-se sucessivamente:
|wv �t#� ���������ÃÁ�
u % |(;wv) �;wv#��������������ÀÁÄ�v � %| wv �#��������ÅÁ
% |wV �(�112;w�)#Г���������������ÅÆÄ
(3.22)
� .vu % /v;�v � % }v % /�;�� � .vu % /v;�v � /�;�� � % }v
(3.23)
Ao contrário dos EF convencionais, nos HMT os valores de /�;�� � : não
desaparecem do sistema governativo quando é efectuada a reunião das equações
elementares.
Ponderando as condições de equilíbrio ao longo da fronteira estática é possível
escrever:
|wГ Ç�112 � � �Г�Г % �È#Г� � 0 (3.24)
Substituindo o campo dos esforços e deslocamentos na fronteira pelas respectivas
aproximações obtém-se:
� |wГ (�112 tu � �ГwГ�Г % �)#Г � 0 (3.25)
18
� |wГ �112t#Г�������ÃГ�
u % |wГ �#Г �������ÅГ� |wГ (�ГwГ�Г)#Г�������������ÀГ�
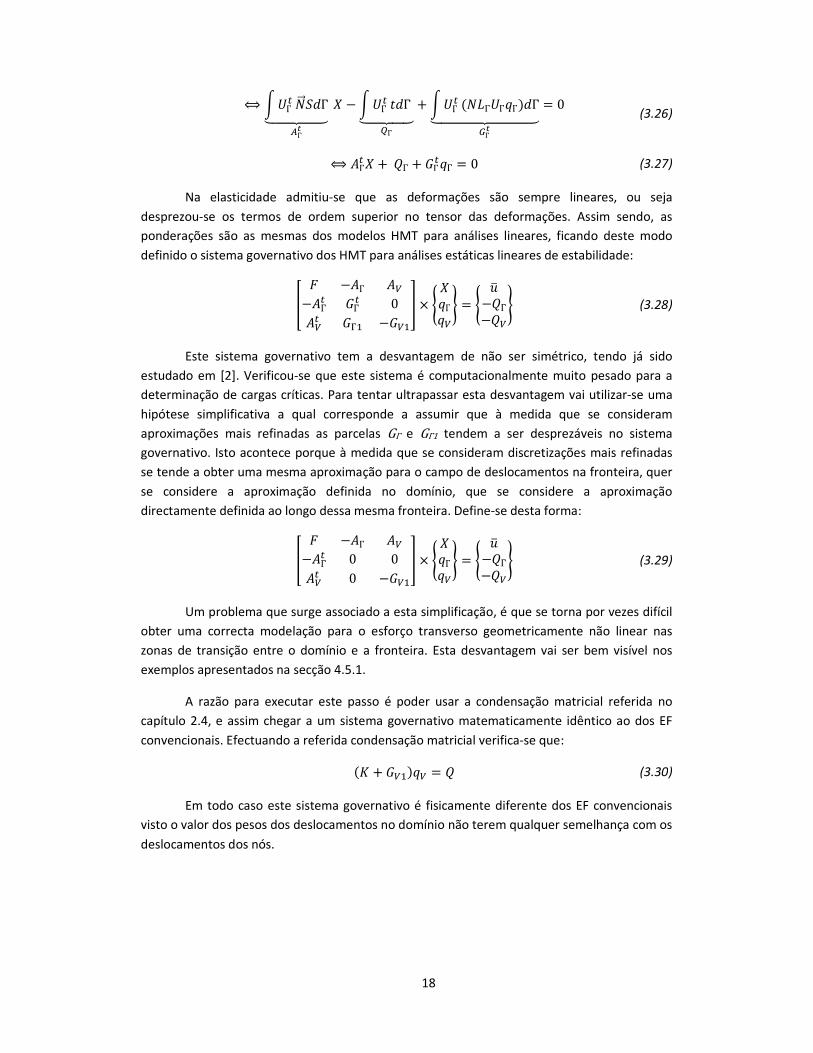
� 0 (3.26)
� .Г u � }Г � /Г �Г � 0 (3.27)
Na elasticidade admitiu-se que as deformações são sempre lineares, ou seja
desprezou-se os termos de ordem superior no tensor das deformações. Assim sendo, as
ponderações são as mesmas dos modelos HMT para análises lineares, ficando deste modo
definido o sistema governativo dos HMT para análises estáticas lineares de estabilidade:
i : %.Г .v%.Г /Г 0.v /�; %/v;j � � u�Г�v� � � �B%}Г%}v� (3.28)
Este sistema governativo tem a desvantagem de não ser simétrico, tendo já sido
estudado em [2]. Verificou-se que este sistema é computacionalmente muito pesado para a
determinação de cargas críticas. Para tentar ultrapassar esta desvantagem vai utilizar-se uma
hipótese simplificativa a qual corresponde a assumir que à medida que se consideram
aproximações mais refinadas as parcelas GΓ e GΓ1 tendem a ser desprezáveis no sistema
governativo. Isto acontece porque à medida que se consideram discretizações mais refinadas
se tende a obter uma mesma aproximação para o campo de deslocamentos na fronteira, quer
se considere a aproximação definida no domínio, que se considere a aproximação
directamente definida ao longo dessa mesma fronteira. Define-se desta forma:
i : %.Г .v%.Г 0 0.v 0 %/v;j � � u�Г�v� � � �B%}Г%}v� (3.29)
Um problema que surge associado a esta simplificação, é que se torna por vezes difícil
obter uma correcta modelação para o esforço transverso geometricamente não linear nas
zonas de transição entre o domínio e a fronteira. Esta desvantagem vai ser bem visível nos
exemplos apresentados na secção 4.5.1.
A razão para executar este passo é poder usar a condensação matricial referida no
capítulo 2.4, e assim chegar a um sistema governativo matematicamente idêntico ao dos EF
convencionais. Efectuando a referida condensação matricial verifica-se que:
(� � /v;)�v � } (3.30)
Em todo caso este sistema governativo é fisicamente diferente dos EF convencionais
visto o valor dos pesos dos deslocamentos no domínio não terem qualquer semelhança com os
deslocamentos dos nós.

19
3.4.1 Matriz Gv2
Usa-se neste caso a equação (3.2) para formular as equações de equilíbrio no domínio.
Com esta opção, as condições de equilíbrio na fronteira ficam semelhantes às que são
definidas para as análises lineares, sendo esta uma vantagem em termos de formulação.
Define-se assim o operador de equilíbrio LV2 e admite-se a designação de novos eixos T�V e H�N.
XYZY[#�#$ � � � 0#�#$ � � � 0#�#$ % � � � #�#$ � � � 0
� (3.31)
2 � ® 0 0 00 0 0##$ 0 0¯ �� � � � �2� � 0 (3.32)
Ponderando as equações de equilíbrio no domínio obtém-se:
| w�� (�� � � � �2�)#� � 0 (3.33)
Desenvolvendo a equação (3.37) obtém-se:
� |wv �t#� ���������ÃÁ�
u � |wv �<wv#������������ÀÁ¨�v � %|wv �#��������ÅÁ
(3.34)
Depois de montado o sistema governativo observa-se que o sinal da matriz geométrica
mudou em relação ao sistema governativo (3.30) e que se perde a condição de determinação
de cargas críticas com deformabilidade por corte. Verifica-se também que esta matriz não é
simétrica, pormenor que não influencia a convergência do modelo, apenas tornando mais
demorado o processo de resolução.
i : %.Г .v%.Г 0 0.v 0 /v<j � � u�Г�v� � � �B%}Г%}v� (3.35)
Este sistema também pode ser condensado matricialmente, exactamente como em
(3.30), resultando:
(� % /v<)�v � } (3.36)

20
3.4.2 Matriz Gv3
Usa-se neste caso a equação (3.2) para formular as equações de equilíbrio no domínio
com α�-θ. Este possui as mesmas vantagens e desvantagens da matriz GV2. Define-se assim o
operador de equilíbrio LV3.
XYZY[#�#$ � � � 0#�#$ � � � 0#�#$ % � % �� � � � 0
� (3.37)
= � 70 0 00 0 00 0 18 �� � � % �=� � 0 (3.38)
A imposição ponderada das condições de equilíbrio (2.19) conduz à definição da matriz
geométrica GV3.
| wv �t#� ���������ÃÁ�
u % |wv �=wv#������������ÀÁÎ�v � %|wv �#��������ÅÁ
(3.39)
Este formato possui ainda as seguintes vantagens adicionais: o sistema governativo é
simétrico e caso o esforço normal N seja constante a matriz geométrica é totalmente diagonal,
o que é especialmente eficaz na resolução do problema de vectores e valores próprios
envolvido na determinação das cargas críticas e dos modos de encurvadura.
O sistema governativo pode escrever-se neste caso na seguinte forma:
i : %.Г .v%.Г 0 0.v 0 %/v=j � � u�Г�v� � � �B%}Г%}v� (3.40)
Este sistema também pode ser condensado matricialmente exactamente como em
(3.30) resultando:
(� � /v=)�v � } (3.41)
3.4.3 Determinação de cargas críticas
O problema da determinação de cargas críticas consiste num simples problema de
valores e vectores próprios num ponto de bifurcação [14]. Tanto para os modelos de EF
convencionais como para os modelos HMT estas são determinadas com as equações
#�� � Ï/v � 0 (3.42)
#�(� � Ï/v;) � 0 (3.43)

21
#�(� % Ï/v<) � 0 (3.44)
#�(� � Ï/v=) � 0 (3.45)
Os valores próprios são dados por λ e os vectores próprios por qV. Os valores iniciais de N são determinados com base numa análise elástica linear com cargas unitárias.
3.5 Efeitos Geometricamente Não Lineares em Placas
Neste caso apenas se vão escrever as equações de equilíbrio no domínio, visto no
capítulo 3.4 se ter desprezado o efeito geometricamente não linear do equilíbrio na fronteira
para a matriz GV1. Neste trabalho apenas se determinam tensões críticas em lajes, onde a
única carga considerada é o esforço de membrana inicialmente existente.
Considerando o elemento de placa na sua configuração inicial e deformada, tal como
se encontra representado na Figura 3-4, deduz-se o equilíbrio na posição deformada, usando o
somatório de forças verticais e momentos totais [kN e kNm]. Maiores detalhes desta dedução
podem ser encontrados em [13], onde hij�σij x espessura. Admite-se como nula a carga
transversal aplicada no domínio da laje, q(x,y)�0.
Figura 3-4 – Equilíbrio no domínio na posição deformada do elemento placa.
w
y
x
A
dy
dx
mxy+dmxy
my+dmy
vy+dvy
mxy
my
vy
mxy
mxvx
mxy+dmxy
mx+dmx
vx+dvx
q(x,y)
hxy+dhxy
hy+dhy
hxy
hy
hxy+dhxy
hx+dhx
hxy
hx

22
XYYZYY[b^\b$ � b^]bc � 0b�\b$ � b�\]bc % ^\ � e\ b�b$ � e\] b�bc � 0b�\b$ � b�\]bc % ^] � e] b�bc � e\] b�b$ � 0
� (3.46)
O equilíbrio na posição deformada das placas pode ser escrito na seguinte forma:
�� � � � <� � 0 < � !!!"0 0 e\ bb$ � e\] bbc0 0 e]\ bb$ � e] bbc0 0 0 '(
(() (3.47)
Caso se pretenda contabilizar a deformabilidade por corte no cálculo da carga crítica,
então é necessário orientar os eixos na posição deformada em conformidade com a orientação
das fibras normais flectidas. E admitindo que o esforço de membrana é constante, chegamos
assim a uma nova equação de equilíbrio:
XYYZYY[b^\b$ � b^]bc � I\ b<�b$< � I\] b<�b$bc � I] b<�bc< � 0b�\b$ � b�\]bc % ^\ � 0b�\b$ � b�\]bc % ^] � 0
� (3.48)
�� � � � v� � 0 (3.49)
Resultando no seguinte operador de equilíbrio na posição deformada:
v � ®0 0 00 0 00 0 I\ b<b$< � I\] b<b$bc � I] b<bc<¯

23
3.6 Análise dos Efeitos Geometricamente Não Lineares em Placas com Modelos Convencionais de EF
É possível usar os mesmos passos da dedução das barras para as matrizes geométricas
das placas. Contudo, também seria possível deduzir a matriz geométrica dos EF convencionais
[13] usando princípios energéticos. Deste modo definem-se os seguintes operadores para as
lajes:
; � !!!!"0 0 00 0 00 0 bb$0 0 bbc'(
((() I � !!
"0 0 0 00 0 0 00 0 I\ I\]0 0 I\] I] '(() (3.50)
Assim sendo esta tem a seguinte forma para as lajes de Reissner Mindlin, onde o
sistema governativo toma a mesma forma das barras. Ou seja apesar dos valores da matriz do
esforço axial de membrana n e do operador L1 serem diferentes das barras, o significado
matemático da matriz geométrica GV é comum.
/v; � |(;wv) I;wv#� (3.51)
(� � /v;)�v � } (3.52)
3.7 Análise dos Efeitos Geometricamente Não Lineares em Placas com Modelos HMT
Exactamente como nos EF convencionais, a dedução das matrizes geométricas em
placas com os modelos HMT segue os mesmos passos das barras. A matriz GV1 parte dos
mesmos pressupostos dos adoptados para a dedução da matriz geométrica com elementos
finitos convencionais. Na matriz GV2 admite-se que o esforço de corte se mantém sempre
perpendicular ao eixo inicial da superfície média da placa na posição indeformada. Por fim, na
matriz GV3 admite-se o mesmo pressuposto anterior e que dw/dx�-θx e dw/dy�-θy. Deste
modo definem-se os seguintes operadores e as respectivas matrizes geométricas:
< � !!!"0 0 I\ bb$ � I\] bbc0 0 I\] bb$ � I] bbc0 0 0 '(
(() = � 7 %I\ %I\] 0%I\] %I] 00 0 08 (3.53)
/v; � |(;wv) I;wv#� (3.54)
/v< � |wv <wv#� (3.55)

24
/v= � |wv =wv#� (3.56)
Exactamente como nos EF convencionais, também estas matrizes geométricas têm o
mesmo significado matemático no sistema governativo anteriormente apresentado no
capítulo 3.4. Também é possível aplicar exactamente a mesma condensação matricial das
barras e respectivos algoritmos para o cálculo de valores e vectores próprios para a
determinação de tensões críticas. Maiores detalhes da construção das matrizes geométricas
com os modelos HMT encontram-se apresentadas no Anexo A.

25
4 Análise de Pórticos Planos
Neste capítulo apresentam-se e discutem-se vários testes para validar os modelos
propostos e para aferir a respectiva eficácia numérica na determinação de cargas críticas,
modos de encurvadura e esforços geometricamente não lineares em pórticos planos.
Começou-se por efectuar uma análise da eficiência da discretização tipo p- quando comparada
com uma discretização tipo h- para a barra simplesmente apoiada. É de seguida executado um
teste para a determinação de cargas críticas com deformabilidade por corte. É também
apresentado um teste para se demonstrar a não ocorrência de Shear Locking com os modelos
HMT. São apresentados vários exemplos de determinação de cargas críticas com os modelos
HMT e EF convencionais e comparados com as respectivas formulas teóricas conhecidas, para
barras sem deformabilidade por corte. Os resultados para os EF convencionais foram obtidos
por recurso ao programa comercial SAP2000. Por final são executados vários testes para aferir
a eficácia dos HMT em determinar os esforços geometricamente não lineares em pórticos.
4.1 Coluna Simplesmente Apoiada sem Deformabilidade por Corte
Neste exemplo efectua-se a de uma barra simplesmente apoiada, onde se pretende
demonstrar as vantagens numéricas do uso dos macroelementos. São ainda apresentados os
vários modos de encurvadura obtidos com uma discretização envolvendo a consideração de 2
elementos, de modo a poder mostrar a violação das condições de compatibilidade que pode
ocorrer quando se utilizam modelos HMT. Considera-se a coluna apresentada na Figura 4-1
Figura 4-1 – Coluna simplesmente apoiada comprimida.
ÚÛÜ � Ý<I< ,-< (4.1)
Na equação (4.1) é apresentado o valor teórico da carga crítica duma coluna
simplesmente apoiada, sem deformabilidade por corte. O valor de L é o comprimento do vão
da coluna e n o valor do modo de encurvadura para o qual se quer determinar a carga crítica.
Para a comparação de resultados na determinação da carga crítica, considerou-se a
discretização referida na Tabela 4-1. Para mostrar a eficácia dos macro elementos, atribui-se
um maior numero de graus de liberdade aos elementos com menores dimensões.
9 m
E=210 GPa
A=0,01 m
I=0,001 m
u=0,2
2
4
F=5/6
P

26
Grau Aproximação Polinómio
Discretizações Graus Liberdade M N V
A1 (1 elemento) 56 13 2 13
A12 (2 elementos) 64 7 2 7
A14 (4 elementos) 80 4 2 4
A18 (8 elementos) 96 2 2 2
Tabela 4-1 – Discretizações adoptadas.
Para os graus de aproximação dos deslocamentos, e para evitar algum problema
associado à existência de dependências no sistema governativo global, usou-se um grau abaixo
dos respectivos esforços. Na discretização A1 considerou-se apenas 1 único elemento. Os
valores da carga crítica estão associados a cada um dos modos de encurvadura, comparando-
se os resultados obtidos com os valores teóricos.
Os resultados obtidos para a determinação do valor absoluto do erro (isto porque os
HMT apresentam tanto majorantes como minorantes da carga crítica) entre a carga crítica
teórica e a carga crítica numérica, para as várias matrizes geométricas são apresentados de
seguida em escala logaritmica. No caso do erro ser 100% é porque não foi possível determinar
a carga crítica desse modo de encurvadura
Figura 4-2 – Erro da carga crítica com a matriz geométrica GV1.
Figura 4-3 – Erro da carga crítica com a matriz geométrica GV2.
0,0010%
0,0100%
0,1000%
1,0000%
10,0000%
100,0000%
1 2 3 4 5 6 7 8 9 10
Erro
(%)
Modo de Encurvadura
Erro A1
Erro A12
Erro A14
Erro A18
0,0000%
0,0000%
0,0001%
0,0100%
1,0000%
100,0000%
1 2 3 4 5 6 7 8 9 10
Erro
(%
)
Modo de Encurvadura
Erro A1
Erro A12
Erro A14
Erro A18

27
Figura 4-4 – Erro da carga crítica com a matriz geométrica GV3.
Os resultados são idênticos nos 3 casos. O macro elemento para os primeiros modos
de encurvadura é sempre o mais eficiente, mas para elevados modos de encurvadura os
resultados acabam por ser semelhantes. Verifica-se também que o macro elemento é mais
eficaz com a matriz geométrica GV3. Apresenta-se de seguida as deformadas para a
discretização A12 os 12 primeiros modos de encurvadura obtidos considerando a matriz
geométrica GV 3:
Figura 4-5 – Modos de encurvadura obtidos com a discretização A12 para GV3.
0,0000%
0,0000%
0,0000%
0,0010%
0,1000%
10,0000%
1 2 3 4 5 6 7 8 9 10
Erro
da(
%)
Modo de Encurvadura
Erro A1
Erro A12
Erro A14
Erro A18

28
Observa-se que as deformadas dos modos de encurvadura são coerentes com a
fronteira cinemáticas até ao 7º modo, visto este ultimo já ter violado a imposição do
deslocamento horizontal nulo no apoio. Também se observa que a partir do 7º modo se perde
a compatibilidade no nó central.
4.2 Coluna em Consola com Deformabilidade por Corte
Determinou-se a carga crítica com deformabilidade por corte usando a matriz
geométrica GV1 e os EF convencionais para diferentes tipos de discretização. Para a
determinação da carga crítica teórica com deformabilidade por corte usou-se a hipótese da
viga de Timoshenko dw/dx=α, ou seja o corte é perpendicular à fibra de flexão pura na posição
deformada.
Apresenta-se em (4.2) a carga crítica teórica duma consola com deformabilidade por
corte. A dedução desta equação [13] parte dos mesmos pressupostos, da determinação
numérica de cargas críticas com deformabilidade por corte usados neste trabalho
Figura 4-6 – Coluna comprimida.
ÚÞ � Ý< ,-< ÚÛÜ � ÚÞ1 � ÚÞ/.Û
(4.2)
Consideraram-se as seguintes discretizações da Tabela 4-1para os campos de esforços
M e V, onde o N tomou sempre o valor de grau 2. Para os graus de aproximação dos
deslocamentos, e para evitar dependências no sistema governativo usou-se um grau abaixo do
que é utilizado na aproximação dos respectivos esforços. Para os EF convencionais usou-se o
mesmo número total de graus de liberdade dos modelos HMT para cada uma das
discretizações adoptadas, tornando possível deste modo uma comparação directa entre os
valores da determinação de cargas críticas com deformabilidade por corte com os modelos
HMT e com os EF convencionais. O valor da discretização adoptada para os modelos HMT e o
número de graus de liberdade usados encontram-se representados na Tabela 4-2. O gráfico da
comparação em escala logaritmica do valor do erro da determinação da carga crítica com os
modelos de EF convencionais e com os modelos HMT encontra-se apresentado na Figura 4-7.
9 m
P
E=210 GPa
A=0,01 m
I=0,001 m
u=0,2
2
4
F=5/6
29
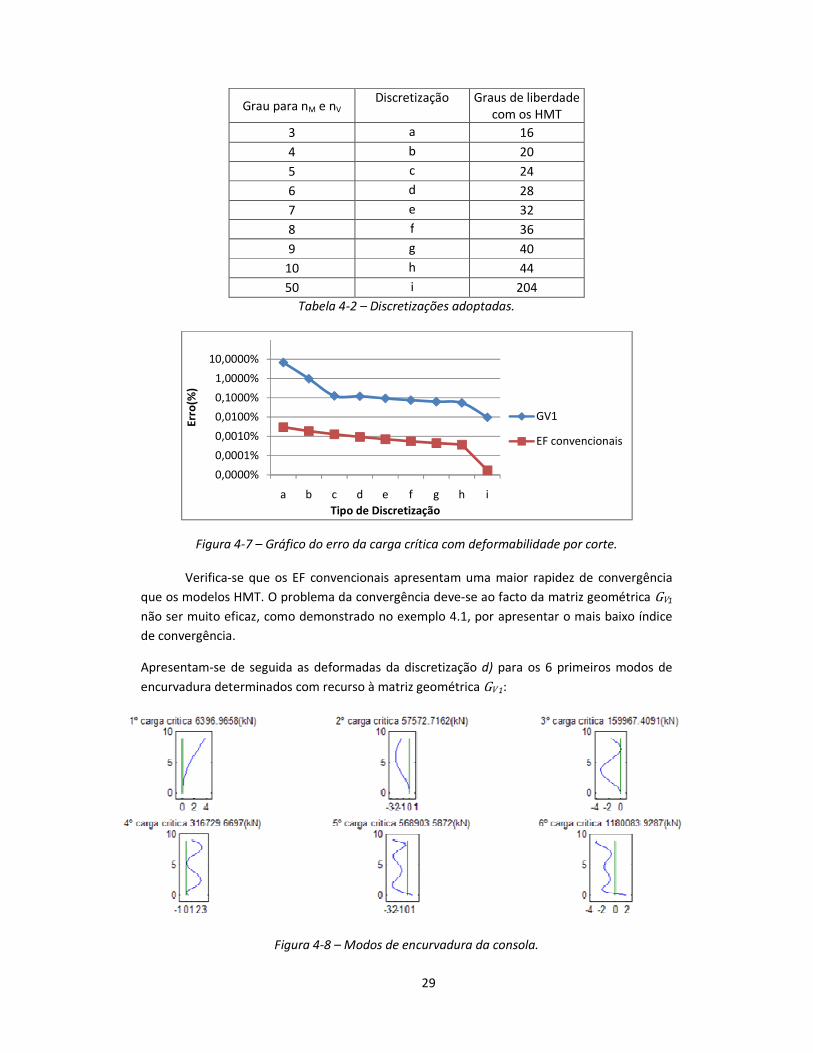
Grau para nM e nV Discretização Graus de liberdade
com os HMT
3 a 16
4 b 20
5 c 24
6 d 28
7 e 32
8 f 36
9 g 40
10 h 44
50 i 204
Tabela 4-2 – Discretizações adoptadas.
Figura 4-7 – Gráfico do erro da carga crítica com deformabilidade por corte.
Verifica-se que os EF convencionais apresentam uma maior rapidez de convergência
que os modelos HMT. O problema da convergência deve-se ao facto da matriz geométrica GV1
não ser muito eficaz, como demonstrado no exemplo 4.1, por apresentar o mais baixo índice
de convergência.
Apresentam-se de seguida as deformadas da discretização d) para os 6 primeiros modos de
encurvadura determinados com recurso à matriz geométrica GV 1:
Figura 4-8 – Modos de encurvadura da consola.
0,0000%
0,0001%
0,0010%
0,0100%
0,1000%
1,0000%
10,0000%
a b c d e f g h i
Erro
(%)
Tipo de Discretização
GV1
EF convencionais

30
Verifica-se que os modos de encurvadura são coerentes com as fronteiras cinemáticas
até ao 3º modo, visto que a partir deste último já se começa a violar a condição de rotação
nula na base. Isto demonstra mais uma vez alguma ineficácia da matriz geométrica GV1 em
determinar correctamente os modos de encurvadura, mesmo para discretizações envolvendo
um elevado número de graus de liberdade.
4.3 Sensibilidade ao Shear Locking
Nos modelos HMT, o fenómeno do Shear Locking não ocorre [8]. Para ilustrar a não
ocorrência deste efeito, varia-se a espessura da coluna e determina-se para cada caso o
quociente entre o valor das cargas críticas teóricas (com vigas sem deformabilidade por corte)
e o valor das cargas críticas determinadas numericamente com GV1 (com deformabilidade por
corte).
ßáEHF � ÚÛÜ(�óâHEF)ÚÛÜ(I��éâHEF) (4.3)
Considerou-se os seguintes graus de aproximação para os esforços: M-9,N-2,V-9. Para
os respectivos deslocamentos, e para evitar alguma dependência no sistema governativo usou-
se um grau abaixo dos esforços respectivos.
Figura 4-9 – Gráfico do rácio em função da esbelteza.
Verifica-se que à medida que a esbelteza vai aumentando o valor do rácio tende para a
unidade, o que significa que não se verifica a existência de Shear Locking quando se utilizam os
modelos HMT.
4.4 Testes numéricos
Para a análise da determinação de cargas críticas sem deformabilidade por corte
consideram-se as diversas estruturas apresentadas nos capítulos seguintes. Calculou-se a carga
crítica para estruturas usando os modelos HMT, com a matriz geométrica GV1, GV2, GV3 e com
recurso ao programa SAP2000 para os elementos finitos convencionais. As malhas tipo usadas
para os elementos finitos convencionais estão representadas no Anexo D. Comparam-se os
resultados em relação ao valor das cargas críticas teóricas e a sua variação em função do tipo
0,991
1,011,02
1,03
20 30 40 45 50 60 90
Rác
io P
e/P
cr
Esbelteza
Pe/Pcr
31
de discretização p- para os HMT. O Tipo de discretização varia segundo os graus de
aproximação como referido na Tabela 4-1 no capítulo 4.2.
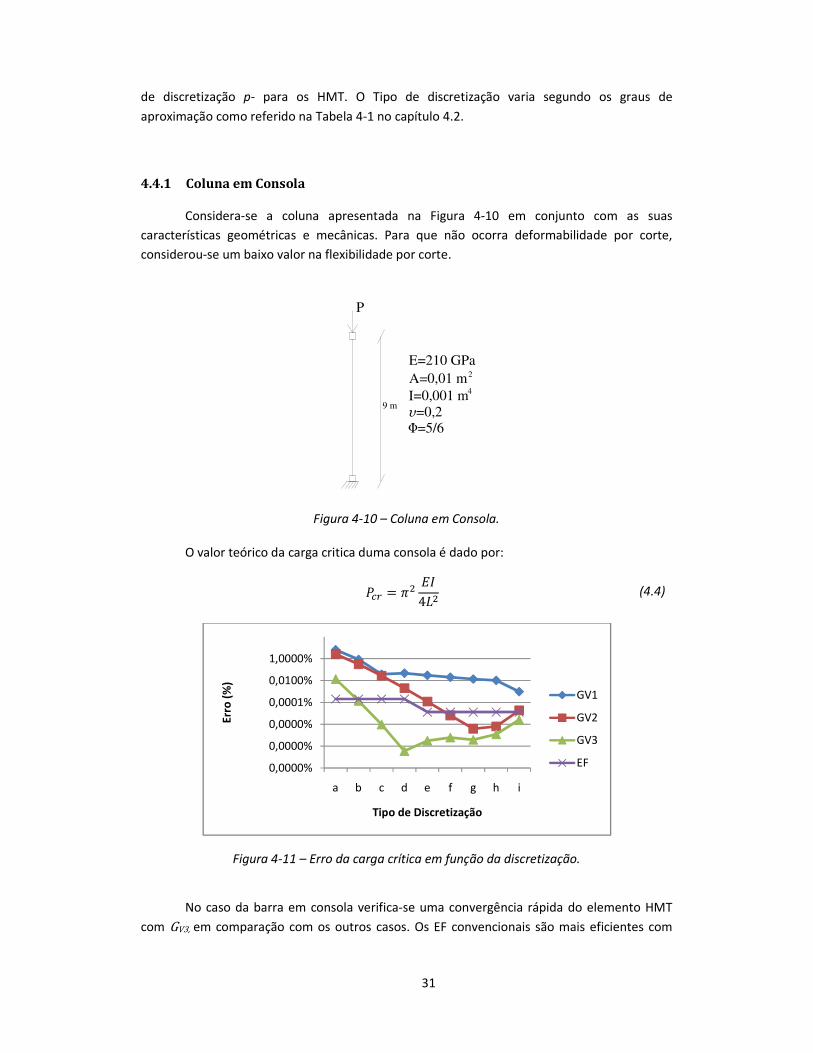
4.4.1 Coluna em Consola
Considera-se a coluna apresentada na Figura 4-10 em conjunto com as suas
características geométricas e mecânicas. Para que não ocorra deformabilidade por corte,
considerou-se um baixo valor na flexibilidade por corte.
Figura 4-10 – Coluna em Consola.
O valor teórico da carga critica duma consola é dado por:
ÚÛÜ � Ý< ,-4< (4.4)
Figura 4-11 – Erro da carga crítica em função da discretização.
No caso da barra em consola verifica-se uma convergência rápida do elemento HMT
com GV3, em comparação com os outros casos. Os EF convencionais são mais eficientes com
9 m
P
E=210 GPa
A=0,01 m
I=0,001 m
u=0,2
2
4
F=5/6
0,0000%
0,0000%
0,0000%
0,0001%
0,0100%
1,0000%
a b c d e f g h i
Erro
(%
)
Tipo de Discretização
GV1
GV2
GV3
EF

32
menos graus de liberdade que os HMT com GV1 e GV2, mas para maior refinamento o GV2, apresenta melhores resultados para maiores graus de discretização.
4.4.2 Coluna Bi-Encastrada
Para este exemplo considera-se a coluna apresentada na Figura 4-12 em conjunto com
as suas características geométricas e mecânicas. Para que não ocorra deformabilidade por
corte, considerou-se um baixo valor na flexibilidade por corte.
Figura 4-12 – Coluna bi-encastrada.
O valor teórico da carga critica duma coluna bi-encastrada é dado por:
ÚÛÜ � Ý< ,-0,25< (4.5)
Figura 4-13 – Erro da carga crítica em função da discretização.
No caso da barra encastrada - encastrada deslizante verifica-se uma convergência
semelhante dos elementos HMT com GV1, GV2 e GV3, sendo no entanto esta última opção
ligeiramente melhor. Os EF convencionais são sempre mais eficientes com menos graus de
9 m
P
E=210 GPa
A=0,01 m
I=0,001 m
u=0,2
2
4
F=5/6
0,0000%
0,0000%
0,0000%
0,0001%
0,0100%
1,0000%
a b c d e f g h i
Erro
(%
)
Tipo de Discretização
GV1
GV2
GV3
EF
33
liberdade que os modelos HMT com GV1. Verifica-se também que os EF convencionais
apresentam menores erros com menores graus de liberdade.
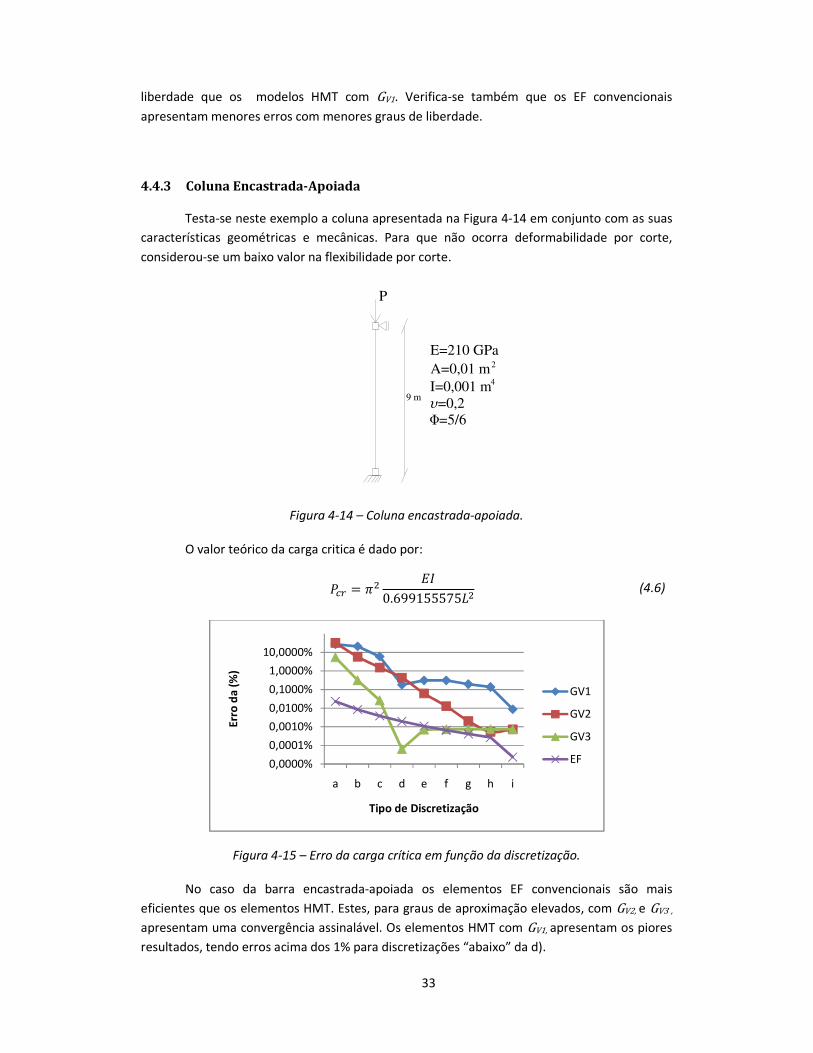
4.4.3 Coluna Encastrada-Apoiada
Testa-se neste exemplo a coluna apresentada na Figura 4-14 em conjunto com as suas
características geométricas e mecânicas. Para que não ocorra deformabilidade por corte,
considerou-se um baixo valor na flexibilidade por corte.
Figura 4-14 – Coluna encastrada-apoiada.
O valor teórico da carga critica é dado por:
ÚÛÜ � Ý< ,-0.699155575< (4.6)
Figura 4-15 – Erro da carga crítica em função da discretização.
No caso da barra encastrada-apoiada os elementos EF convencionais são mais
eficientes que os elementos HMT. Estes, para graus de aproximação elevados, com GV2, e GV3 , apresentam uma convergência assinalável. Os elementos HMT com GV1, apresentam os piores
resultados, tendo erros acima dos 1% para discretizações “abaixo” da d).
9 m
P
E=210 GPa
A=0,01 m
I=0,001 m
u=0,2
2
4
F=5/6
0,0000%
0,0001%
0,0010%
0,0100%
0,1000%
1,0000%
10,0000%
a b c d e f g h i
Erro
da
(%)
Tipo de Discretização
GV1
GV2
GV3
EF

34
4.4.4 Pórtico em L
Considera-se a coluna apresentada na Figura 4-16, em conjunto com as suas
características geométricas e mecânicas. Para que não ocorra deformabilidade por corte,
considerou-se um baixo valor na flexibilidade por corte.
Figura 4-16 – Pórtico em L.
Neste exemplo o valor da carga crítica PCR foi determinada com base nas funções de
estabilidade referidas em [14].
Figura 4-17 – Erro da carga crítica em função da discretização.
No caso do pórtico representado acima, os elementos EF convencionais são os mais
eficientes. Apenas com o aumento dos graus de aproximação, os elementos HMT vão
apresentar uma convergência semelhante, mas mesmo assim com piores resultados. Mais uma
vez se verifica que a matriz geométrica GV3 fornece os melhores resultados
9 m
9 m
P
P
E=210 GPa
A=0,01 m
I=0,001 m
u=0,2
2
4
F=5/6
0,000%
0,000%
0,001%
0,010%
0,100%
1,000%
10,000%
a b c d e f g h i
Erro
(%
)
Tipo de Discretização
GV1
GV2
GV3
EF

35
4.5 Esforços Geometricamente Não lineares
Usando a mesma estrutura dos exemplos anteriores, calcularam-se esforços e
deslocamentos não lineares usando os modelos HMT e os EF convencionais. Os valores
teóricos foram comparados com os de uma análise linear de estabilidade [14].
4.5.1 Coluna Simplesmente Apoiada
Considera-se a coluna apresentada na Figura 4-18 em conjunto com o seu
carregamento e as suas características geométricas e mecânicas. Para que não ocorra
deformabilidade por corte, considerou-se um baixo valor na flexibilidade por corte.
Figura 4-18 – Coluna simplesmente apoiada.
Para a determinação dos esforços e deslocamento geometricamente não lineares
considerou-se que as cargas actuantes na Figura 4-18 são: q=10kN/m e P=2/3PCR.
Figura 4-19 – Gráfico do erro do momento flector a ½ vão da coluna simplesmente apoiada.
9 m
P
q
E=210 GPa
A=0,1 m
I=0,001 m
u=0,2
2
4
F=5/6
0,00000%
0,00000%
0,00010%
0,01000%
1,00000%
a b c d e f g
Erro
(%
)
Tipo de discretização
GV1
GV2
GV3
EF

36
Figura 4-20 – Gráfico do erro do deslocamento no centro da coluna simplesmente apoiada.
Verifica-se que os modelos HMT produzem em geral melhores resultados tanto para o
momento flector como para os deslocamentos geometricamente não lineares, em
comparação com os EF convencionais. O andamento de esforços e a deformada obtidos com a
matriz geométrica GV3 e com a discretização d) está representado na figura 4-21, onde azul se
apresenta os resultados de 1ª ordem, e a vermelho os resultados não lineares.
Figura 4-21 – Diagramas de esforços M,N,V e deformada w com consideração da matriz
geométrica GV3.
Observa-se que quando se considera a matriz geométrica GV3 apenas engloba os
esforços não lineares para os momentos flectores e deslocamentos transversais, isto porque
os eixos dos esforços se mantêm na posição inicial não deformada, ou seja não engloba a
rotação do eixo do esforço transverso na posição deformada. Em todo caso, observando a
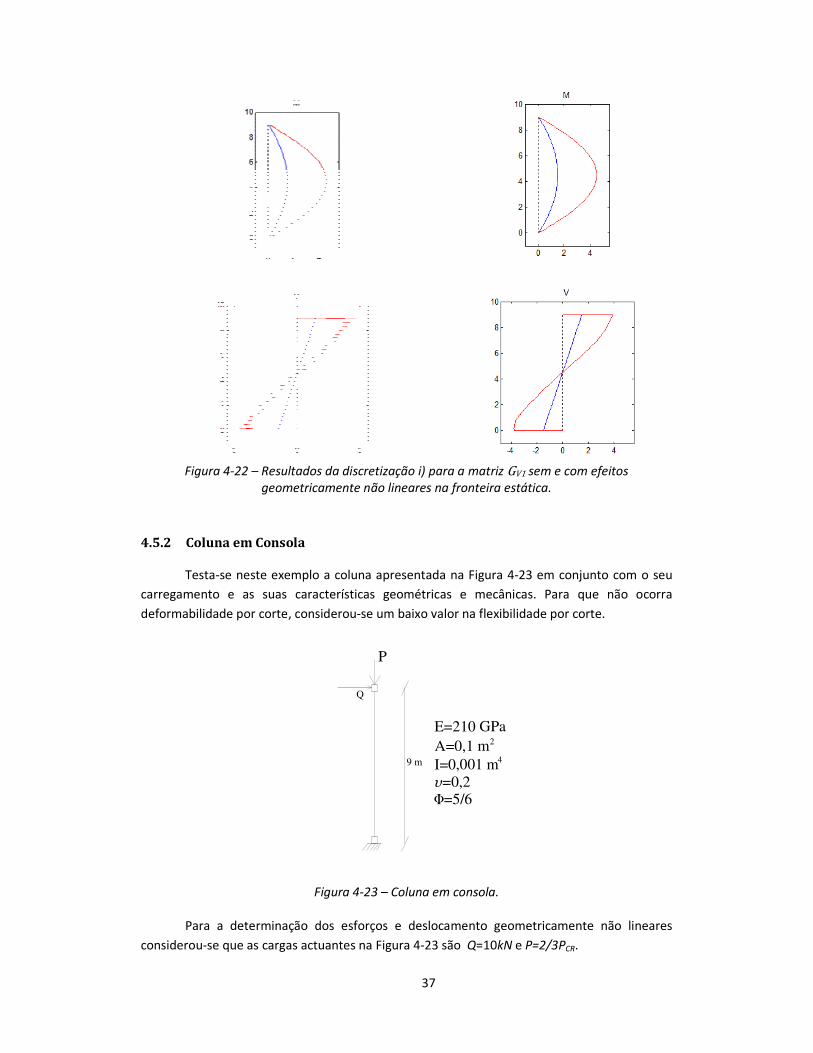
Figura 4-22, verifica-se que a consideração da matriz geométrica GV1 para a discretização i)
consegue estimar os esforços não lineares para o esforço transverso, mas visto não se ter
considerado os efeitos geometricamente não lineares na fronteira estática, verifica-se que os
resultados apresentam uma instabilidade quando se aproximam da fronteira. De acordo com
[2] caso se considere os efeitos geometricamente não lineares na fronteira estática, já é
possível obter com sucesso os esforços transversos não lineares. É possível constatar este
facto observando a Figura 4-22, onde se verifica claramente a instabilidade da solução ao
longo da barra.
0,00000%
0,00010%
0,01000%
1,00000%
100,00000%
a b c d e f g
Erro
(%
)
Tipo de discretização
GV1
GV2
GV3
EF
37
Figura 4-22 – Resultados da discretização i) para a matriz GV1 sem e com efeitos
geometricamente não lineares na fronteira estática.
4.5.2 Coluna em Consola
Testa-se neste exemplo a coluna apresentada na Figura 4-23 em conjunto com o seu
carregamento e as suas características geométricas e mecânicas. Para que não ocorra
deformabilidade por corte, considerou-se um baixo valor na flexibilidade por corte.
Figura 4-23 – Coluna em consola.
Para a determinação dos esforços e deslocamento geometricamente não lineares
considerou-se que as cargas actuantes na Figura 4-23 são Q=10kN e P=2/3PCR.
9 m
P
Q
E=210 GPa
A=0,1 m
I=0,001 m
u=0,2
2
4
F=5/6

38
Figura 4-24 – Gráfico do erro do momento flector na base da coluna em consola.
Figura 4-25 – Gráfico do erro do deslocamento no topo da coluna em consola.
Verifica-se que os modelos HMT produzem uma melhor aproximação aos esforços
teóricos, bem como aos deslocamentos, em comparação com os EF convencionais. O
andamento de esforços e a deformada para GV3 com a discretização d) são apresentados na
Figura 4-26
0,00000%
0,00001%
0,00100%
0,10000%
10,00000%
a b c d e f g
Erro
(%
)
Tipo de discretização
GV1
GV2
GV3
EF
0,00000%
0,00010%
0,01000%
1,00000%
100,00000%
a b c d e f g
Erro
(%
)
Tipo de discretização
GV1
GV2
GV3
EF
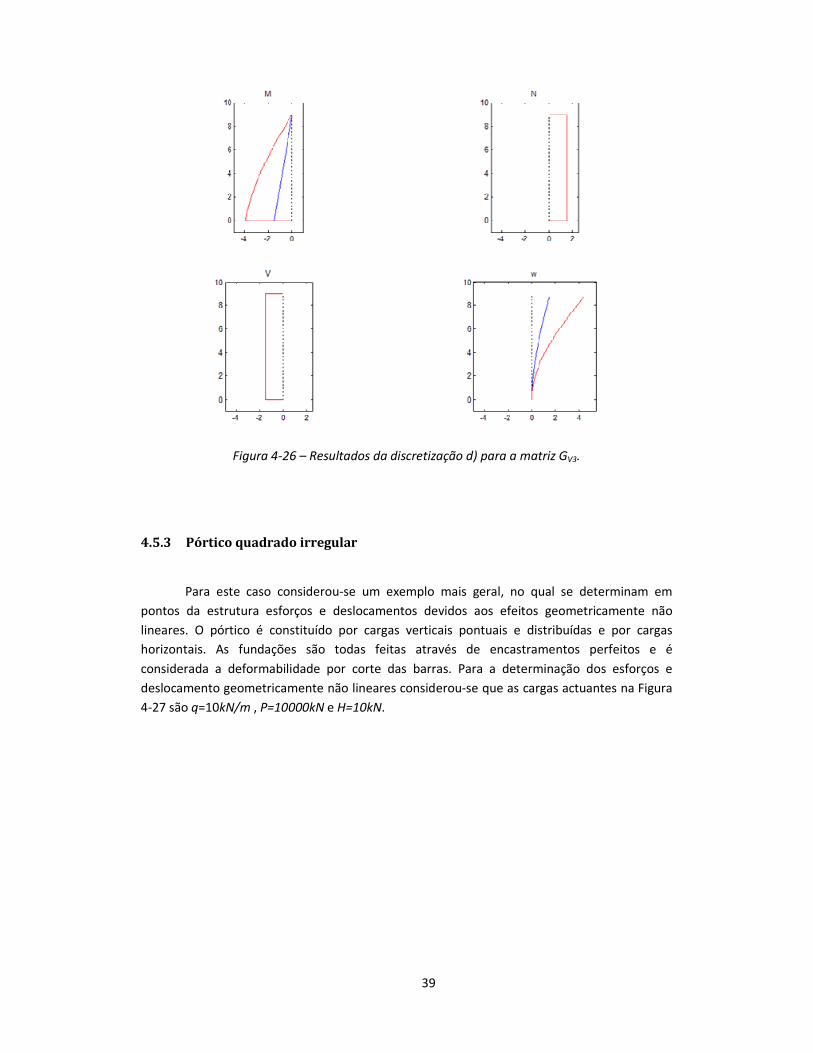
39
Figura 4-26 – Resultados da discretização d) para a matriz GV3.
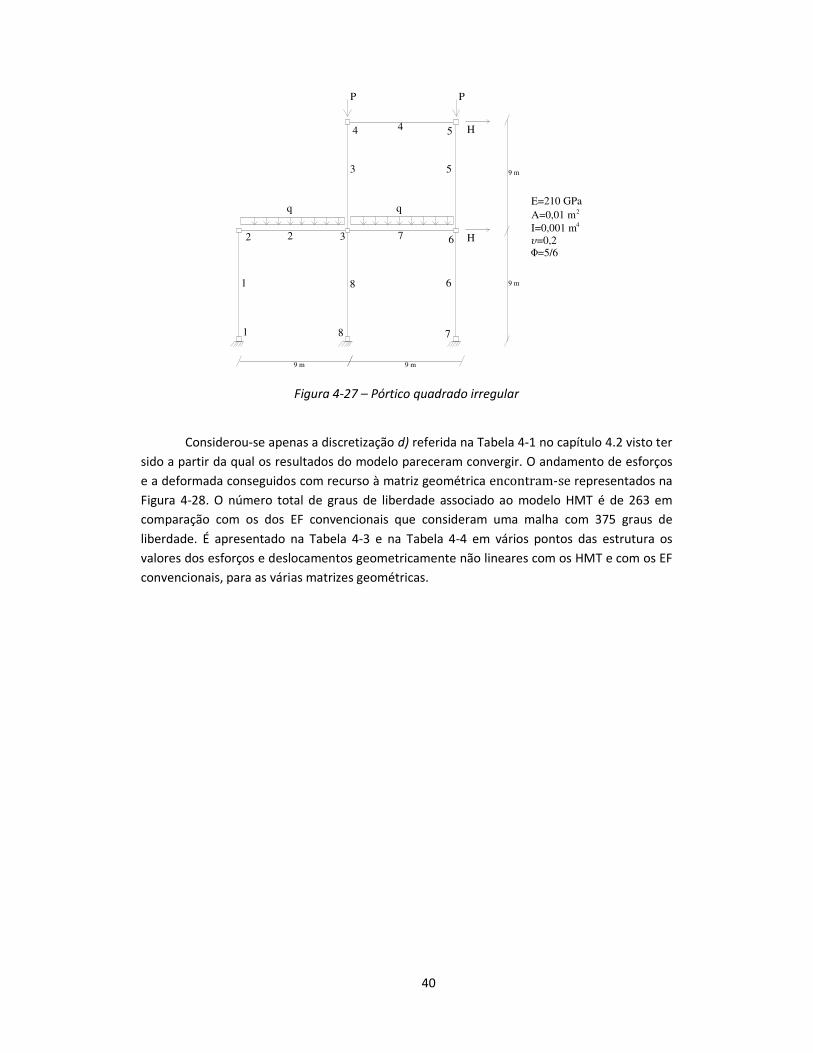
4.5.3 Pórtico quadrado irregular
Para este caso considerou-se um exemplo mais geral, no qual se determinam em
pontos da estrutura esforços e deslocamentos devidos aos efeitos geometricamente não
lineares. O pórtico é constituído por cargas verticais pontuais e distribuídas e por cargas
horizontais. As fundações são todas feitas através de encastramentos perfeitos e é
considerada a deformabilidade por corte das barras. Para a determinação dos esforços e
deslocamento geometricamente não lineares considerou-se que as cargas actuantes na Figura
4-27 são q=10kN/m , P=10000kN e H=10kN.
40
Figura 4-27 – Pórtico quadrado irregular
Considerou-se apenas a discretização d) referida na Tabela 4-1 no capítulo 4.2 visto ter
sido a partir da qual os resultados do modelo pareceram convergir. O andamento de esforços
e a deformada conseguidos com recurso à matriz geométrica encontram-se representados na
Figura 4-28. O número total de graus de liberdade associado ao modelo HMT é de 263 em
comparação com os dos EF convencionais que consideram uma malha com 375 graus de
liberdade. É apresentado na Tabela 4-3 e na Tabela 4-4 em vários pontos das estrutura os
valores dos esforços e deslocamentos geometricamente não lineares com os HMT e com os EF
convencionais, para as várias matrizes geométricas.
9 m
9 m
H
H
P P
9 m
9 m
qqE=210 GPa
A=0,01 m
I=0,001 m
u=0,2
2
4
F=5/6
1
2
3
4
5
68
7
1
2 3
4 5
6
78
41
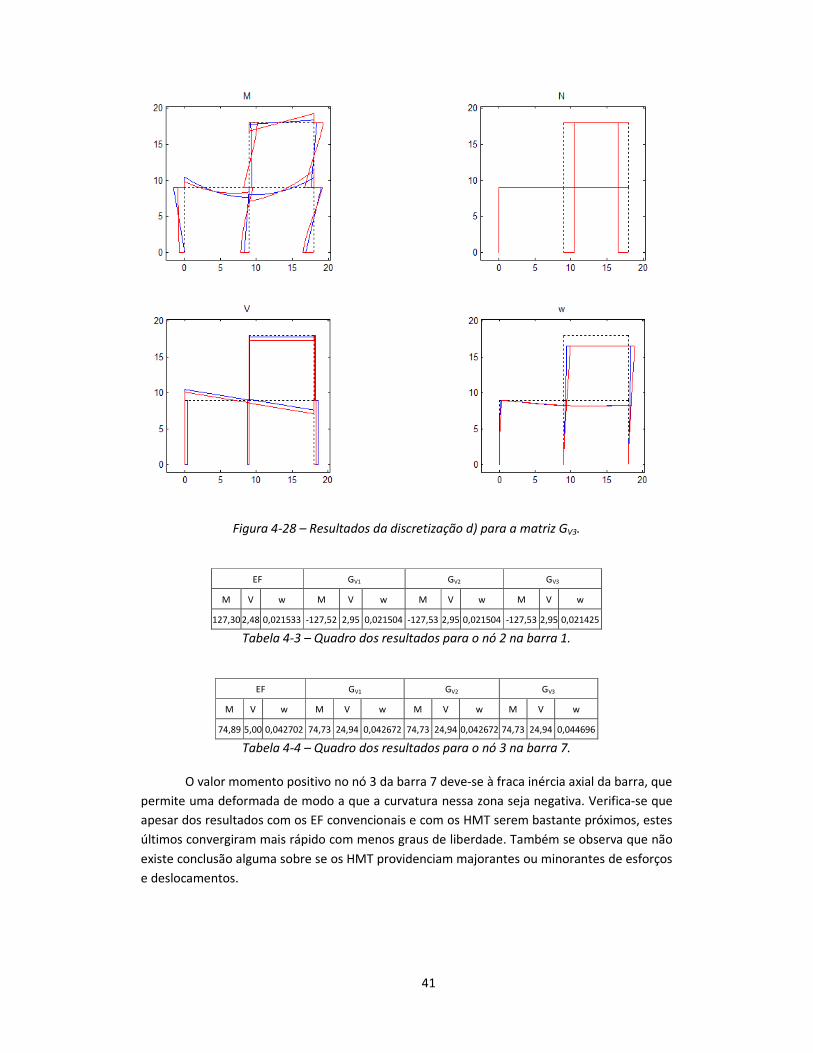
Figura 4-28 – Resultados da discretização d) para a matriz GV3.
EF GV1 GV2 GV3
M V w M V w M V w M V w
127,30 2,48 0,021533 -127,52 2,95 0,021504 -127,53 2,95 0,021504 -127,53 2,95 0,021425
Tabela 4-3 – Quadro dos resultados para o nó 2 na barra 1.
EF GV1 GV2 GV3
M V w M V w M V w M V w
74,89 5,00 0,042702 74,73 24,94 0,042672 74,73 24,94 0,042672 74,73 24,94 0,044696
Tabela 4-4 – Quadro dos resultados para o nó 3 na barra 7.
O valor momento positivo no nó 3 da barra 7 deve-se à fraca inércia axial da barra, que
permite uma deformada de modo a que a curvatura nessa zona seja negativa. Verifica-se que
apesar dos resultados com os EF convencionais e com os HMT serem bastante próximos, estes
últimos convergiram mais rápido com menos graus de liberdade. Também se observa que não
existe conclusão alguma sobre se os HMT providenciam majorantes ou minorantes de esforços
e deslocamentos.
42
5 Análise de Placas
Neste capítulo apresentam-se e discutem-se vários testes para validar os modelos
propostos e para aferir a respectiva eficácia numérica na determinação de cargas críticas,
modos de encurvadura em lajes. Começou-se por efectuar uma análise da eficiência associada
à utilização de macroelementos na análise de uma laje simplesmente apoiada. É de seguida
executado um teste para a determinação de tensões críticas com deformabilidade por corte. É
também apresentado um teste para se demonstrar a não ocorrência de Shear Locking com os
modelos HMT. São apresentados vários exemplos de determinação de cargas críticas com os
modelos HMT e EF e comparadas as respectivas soluções com soluções analíticas [14]
conhecidas, para lajes sem deformabilidade por corte.
Em todos os exemplos seguintes os resultados obtidos para a determinação do valor
absoluto do erro (isto porque os HMT apresentam tanto majorantes como minorantes da
tensão crítica) entre a tensão crítica teórica e a tensão crítica numérica, para as várias matrizes
geométricas são apresentados de seguida em escala logaritmica.
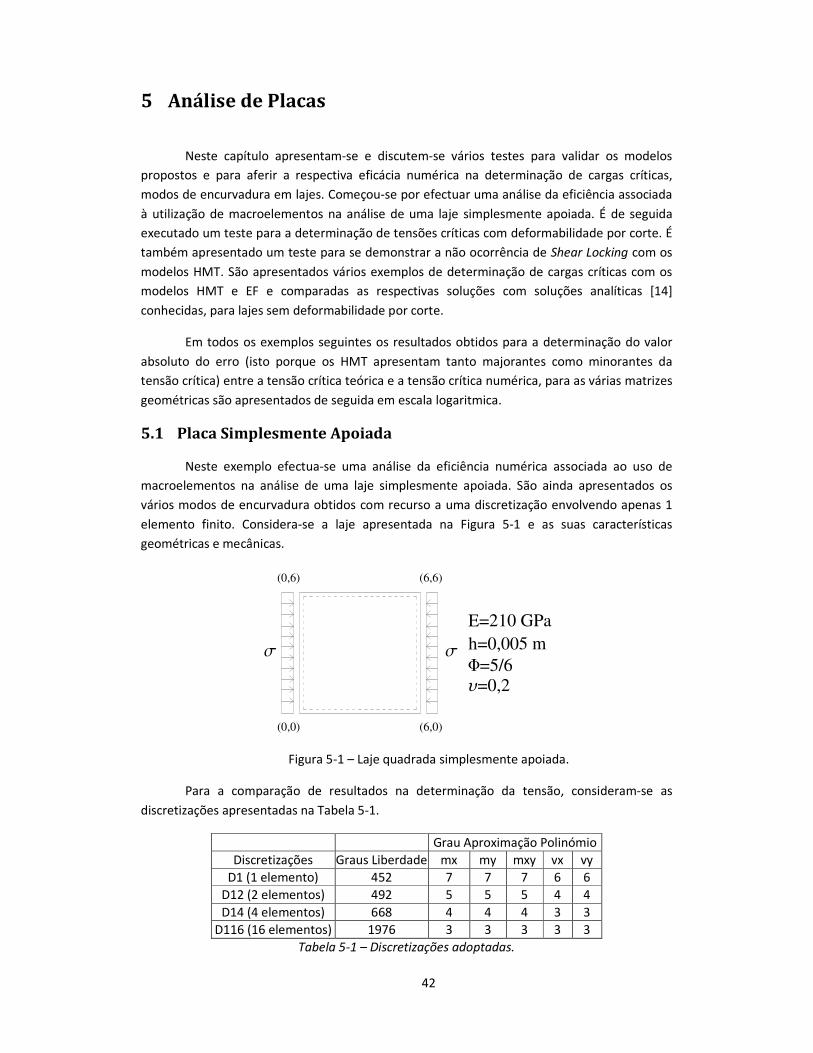
5.1 Placa Simplesmente Apoiada
Neste exemplo efectua-se uma análise da eficiência numérica associada ao uso de
macroelementos na análise de uma laje simplesmente apoiada. São ainda apresentados os
vários modos de encurvadura obtidos com recurso a uma discretização envolvendo apenas 1
elemento finito. Considera-se a laje apresentada na Figura 5-1 e as suas características
geométricas e mecânicas.
Figura 5-1 – Laje quadrada simplesmente apoiada.
Para a comparação de resultados na determinação da tensão, consideram-se as
discretizações apresentadas na Tabela 5-1.
Grau Aproximação Polinómio
Discretizações Graus Liberdade mx my mxy vx vy
D1 (1 elemento) 452 7 7 7 6 6
D12 (2 elementos) 492 5 5 5 4 4
D14 (4 elementos) 668 4 4 4 3 3
D116 (16 elementos) 1976 3 3 3 3 3
Tabela 5-1 – Discretizações adoptadas.
(0,0)
(0,6)
(6,0)
(6,6)
s s
E=210 GPa
h=0,005 m
F=5/6u=0,2
43
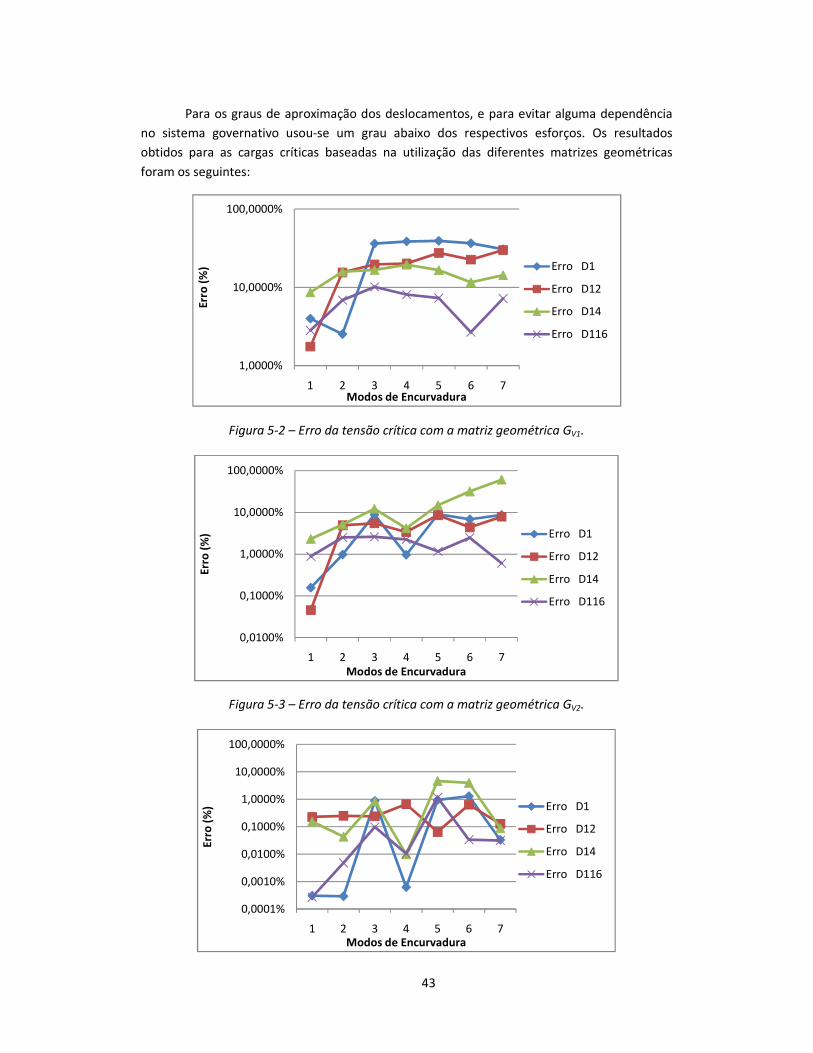
Para os graus de aproximação dos deslocamentos, e para evitar alguma dependência
no sistema governativo usou-se um grau abaixo dos respectivos esforços. Os resultados
obtidos para as cargas críticas baseadas na utilização das diferentes matrizes geométricas
foram os seguintes:
Figura 5-2 – Erro da tensão crítica com a matriz geométrica GV1.
Figura 5-3 – Erro da tensão crítica com a matriz geométrica GV2.
1,0000%
10,0000%
100,0000%
1 2 3 4 5 6 7
Erro
(%
)
Modos de Encurvadura
Erro D1
Erro D12
Erro D14
Erro D116
0,0100%
0,1000%
1,0000%
10,0000%
100,0000%
1 2 3 4 5 6 7
Erro
(%
)
Modos de Encurvadura
Erro D1
Erro D12
Erro D14
Erro D116
0,0001%
0,0010%
0,0100%
0,1000%
1,0000%
10,0000%
100,0000%
1 2 3 4 5 6 7
Erro
(%
)
Modos de Encurvadura
Erro D1
Erro D12
Erro D14
Erro D116
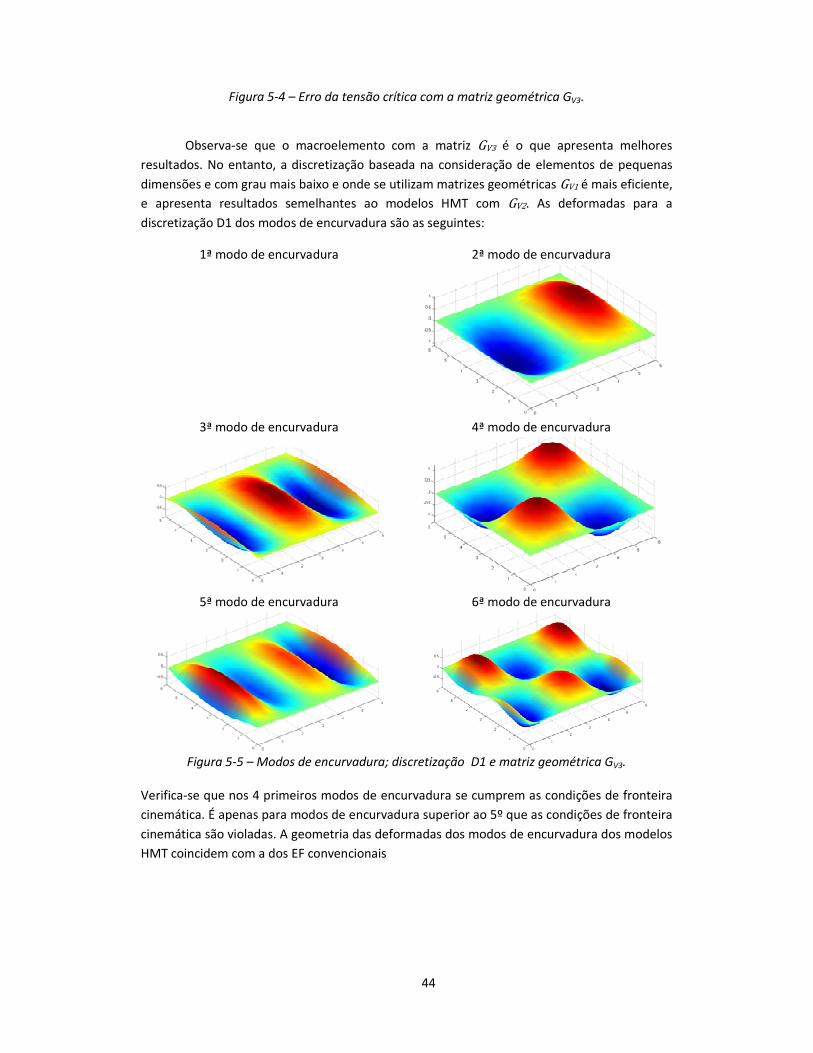
44
Figura 5-4 – Erro da tensão crítica com a matriz geométrica GV3.
Observa-se que o macroelemento com a matriz GV3 é o que apresenta melhores
resultados. No entanto, a discretização baseada na consideração de elementos de pequenas
dimensões e com grau mais baixo e onde se utilizam matrizes geométricas GV1 é mais eficiente,
e apresenta resultados semelhantes ao modelos HMT com GV2. As deformadas para a
discretização D1 dos modos de encurvadura são as seguintes:
1ª modo de encurvadura 2ª modo de encurvadura
3ª modo de encurvadura 4ª modo de encurvadura
5ª modo de encurvadura 6ª modo de encurvadura
Figura 5-5 – Modos de encurvadura; discretização D1 e matriz geométrica GV3.
Verifica-se que nos 4 primeiros modos de encurvadura se cumprem as condições de fronteira
cinemática. É apenas para modos de encurvadura superior ao 5º que as condições de fronteira
cinemática são violadas. A geometria das deformadas dos modos de encurvadura dos modelos
HMT coincidem com a dos EF convencionais

45
1ª modo de encurvadura 2ª modo de encurvadura
3ª modo de encurvadura 4ª modo de encurvadura
5ª modo de encurvadura 6ª modo de encurvadura
Figura 5-6 – Modos de encurvadura com EF convencionais
5.2 Laje Simplesmente Apoiada com Deformabilidade por Corte
Nos modelos HMT, o fenómeno do Shear Locking não ocorre [8]. Para ilustrar a não
ocorrência deste efeito, varia-se a espessura da laje e determina-se para cada caso o quociente
entre o valor das tensões críticas teóricas (com lajes sem deformabilidade por corte) e o valor
das tensões críticas determinadas numericamente com GV1 (com deformabilidade por corte).
ßáEHF � ~ÛÜ(�óâHEF)~ÛÜ(I��éâHEF) (5.1)
Observando a Figura 5-7 , verifica-se exactamente como nas colunas que o efeito de
Shear Locking não ocorre em placas com os HMT.
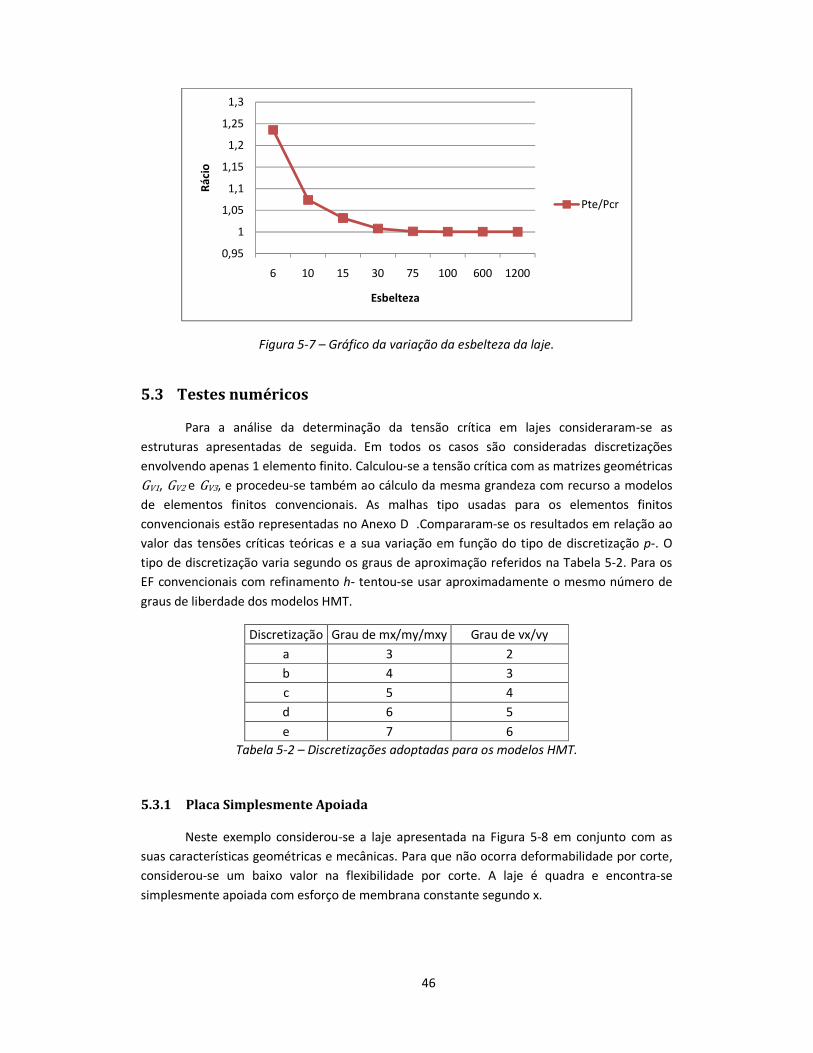
46
Figura 5-7 – Gráfico da variação da esbelteza da laje.
5.3 Testes numéricos
Para a análise da determinação da tensão crítica em lajes consideraram-se as
estruturas apresentadas de seguida. Em todos os casos são consideradas discretizações
envolvendo apenas 1 elemento finito. Calculou-se a tensão crítica com as matrizes geométricas GV1, GV2 e GV3, e procedeu-se também ao cálculo da mesma grandeza com recurso a modelos
de elementos finitos convencionais. As malhas tipo usadas para os elementos finitos
convencionais estão representadas no Anexo D .Compararam-se os resultados em relação ao
valor das tensões críticas teóricas e a sua variação em função do tipo de discretização p-. O
tipo de discretização varia segundo os graus de aproximação referidos na Tabela 5-2. Para os
EF convencionais com refinamento h- tentou-se usar aproximadamente o mesmo número de
graus de liberdade dos modelos HMT.
Discretização Grau de mx/my/mxy Grau de vx/vy
a 3 2
b 4 3
c 5 4
d 6 5
e 7 6
Tabela 5-2 – Discretizações adoptadas para os modelos HMT.
5.3.1 Placa Simplesmente Apoiada
Neste exemplo considerou-se a laje apresentada na Figura 5-8 em conjunto com as
suas características geométricas e mecânicas. Para que não ocorra deformabilidade por corte,
considerou-se um baixo valor na flexibilidade por corte. A laje é quadra e encontra-se
simplesmente apoiada com esforço de membrana constante segundo x.
0,95
1
1,05
1,1
1,15
1,2
1,25
1,3
6 10 15 30 75 100 600 1200
Rác
io
Esbelteza
Pte/Pcr
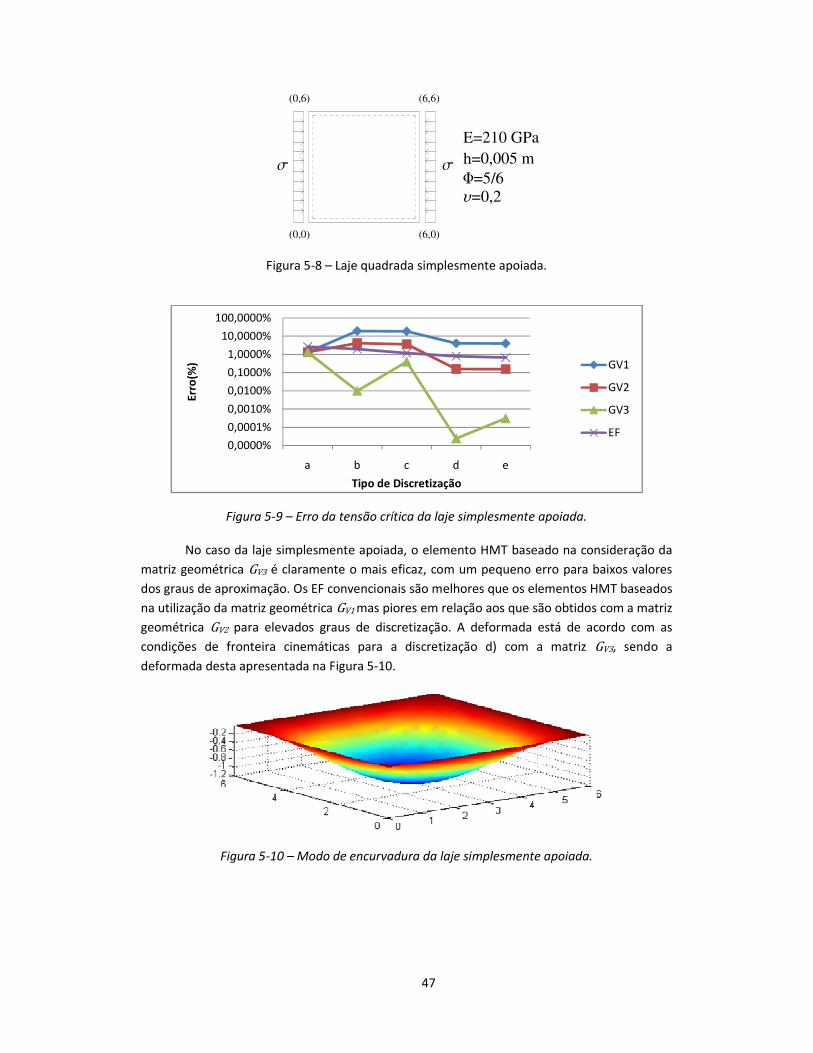
47
Figura 5-8 – Laje quadrada simplesmente apoiada.
Figura 5-9 – Erro da tensão crítica da laje simplesmente apoiada.
No caso da laje simplesmente apoiada, o elemento HMT baseado na consideração da
matriz geométrica GV3 é claramente o mais eficaz, com um pequeno erro para baixos valores
dos graus de aproximação. Os EF convencionais são melhores que os elementos HMT baseados
na utilização da matriz geométrica GV1 mas piores em relação aos que são obtidos com a matriz
geométrica GV2 para elevados graus de discretização. A deformada está de acordo com as
condições de fronteira cinemáticas para a discretização d) com a matriz GV3, sendo a
deformada desta apresentada na Figura 5-10.
Figura 5-10 – Modo de encurvadura da laje simplesmente apoiada.
(0,0)
(0,6)
(6,0)
(6,6)
s s
E=210 GPa
h=0,005 m
F=5/6u=0,2
0,0000%
0,0001%
0,0010%
0,0100%
0,1000%
1,0000%
10,0000%
100,0000%
a b c d e
Erro
(%)
Tipo de Discretização
GV1
GV2
GV3
EF
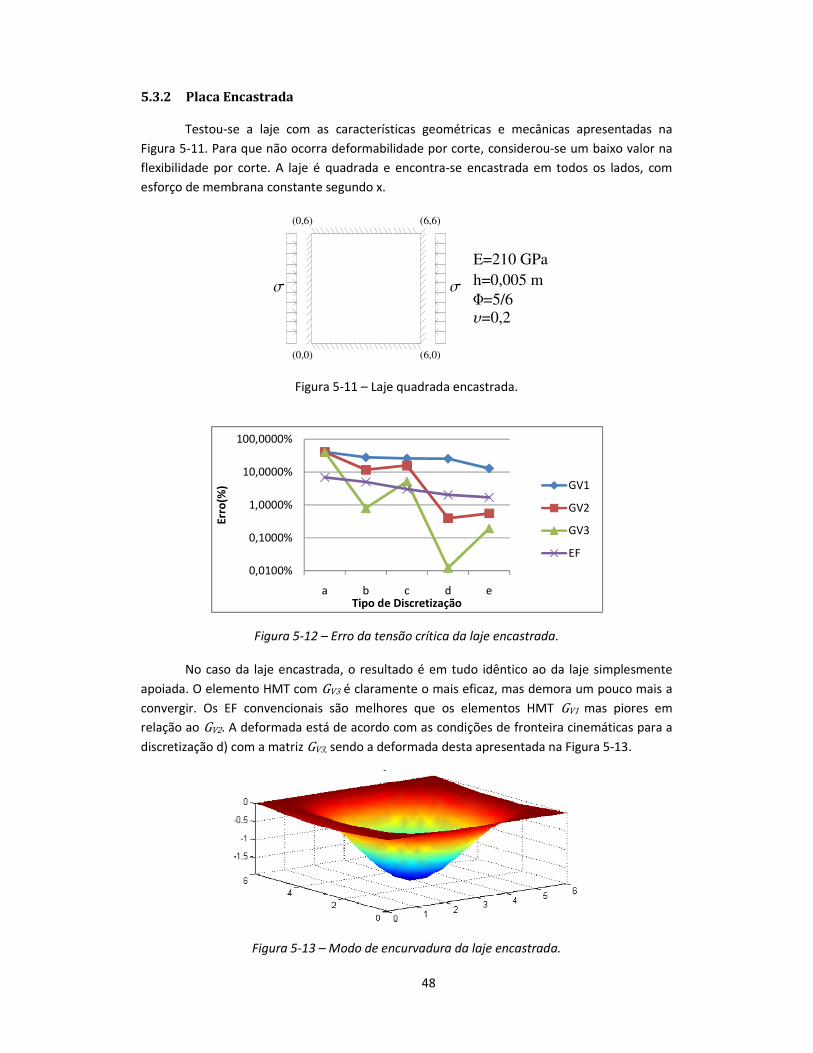
48
5.3.2 Placa Encastrada
Testou-se a laje com as características geométricas e mecânicas apresentadas na
Figura 5-11. Para que não ocorra deformabilidade por corte, considerou-se um baixo valor na
flexibilidade por corte. A laje é quadrada e encontra-se encastrada em todos os lados, com
esforço de membrana constante segundo x.
Figura 5-11 – Laje quadrada encastrada.
Figura 5-12 – Erro da tensão crítica da laje encastrada.
No caso da laje encastrada, o resultado é em tudo idêntico ao da laje simplesmente
apoiada. O elemento HMT com GV3 é claramente o mais eficaz, mas demora um pouco mais a
convergir. Os EF convencionais são melhores que os elementos HMT GV1 mas piores em
relação ao GV2. A deformada está de acordo com as condições de fronteira cinemáticas para a
discretização d) com a matriz GV3, sendo a deformada desta apresentada na Figura 5-13.
Figura 5-13 – Modo de encurvadura da laje encastrada.
s s
E=210 GPa
h=0,005 m
F=5/6u=0,2
(0,0)
(0,6)
(6,0)
(6,6)
0,0100%
0,1000%
1,0000%
10,0000%
100,0000%
a b c d e
Erro
(%)
Tipo de Discretização
GV1
GV2
GV3
EF
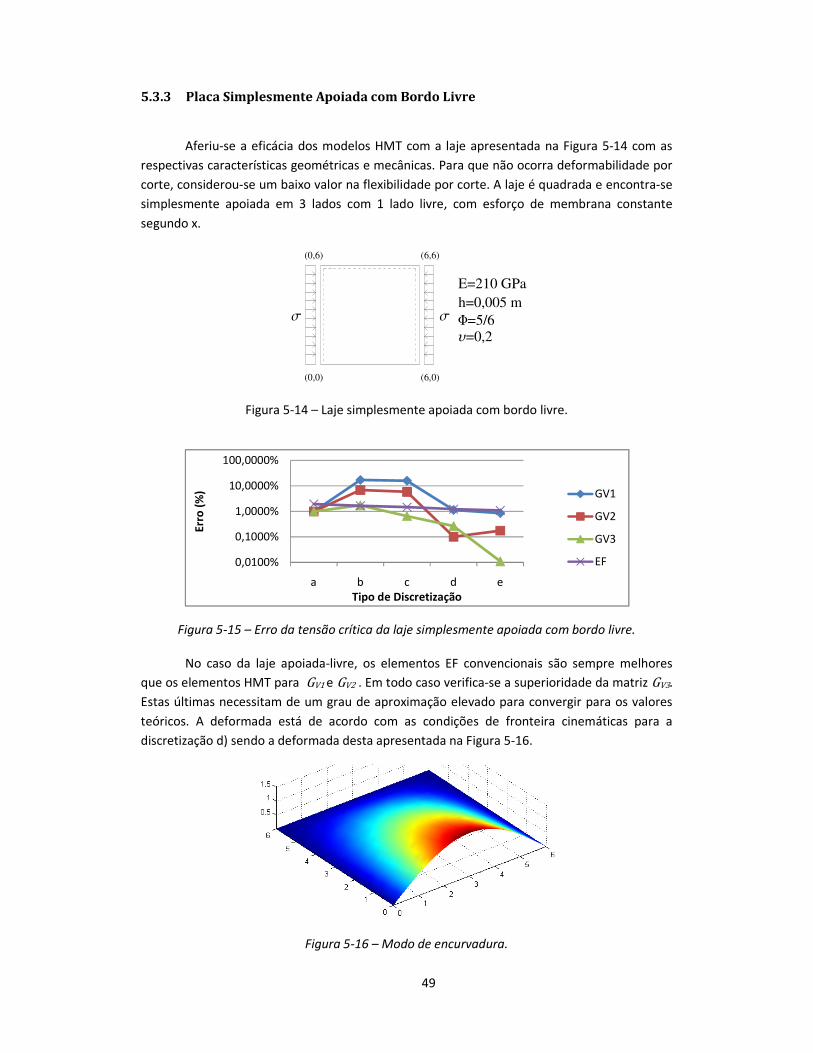
49
5.3.3 Placa Simplesmente Apoiada com Bordo Livre
Aferiu-se a eficácia dos modelos HMT com a laje apresentada na Figura 5-14 com as
respectivas características geométricas e mecânicas. Para que não ocorra deformabilidade por
corte, considerou-se um baixo valor na flexibilidade por corte. A laje é quadrada e encontra-se
simplesmente apoiada em 3 lados com 1 lado livre, com esforço de membrana constante
segundo x.
Figura 5-14 – Laje simplesmente apoiada com bordo livre.
Figura 5-15 – Erro da tensão crítica da laje simplesmente apoiada com bordo livre.
No caso da laje apoiada-livre, os elementos EF convencionais são sempre melhores
que os elementos HMT para GV1 e GV2 . Em todo caso verifica-se a superioridade da matriz GV3. Estas últimas necessitam de um grau de aproximação elevado para convergir para os valores
teóricos. A deformada está de acordo com as condições de fronteira cinemáticas para a
discretização d) sendo a deformada desta apresentada na Figura 5-16.
Figura 5-16 – Modo de encurvadura.
s s
E=210 GPa
h=0,005 m
F=5/6u=0,2
(0,0)
(0,6)
(6,0)
(6,6)
0,0100%
0,1000%
1,0000%
10,0000%
100,0000%
a b c d e
Erro
(%
)
Tipo de Discretização
GV1
GV2
GV3
EF
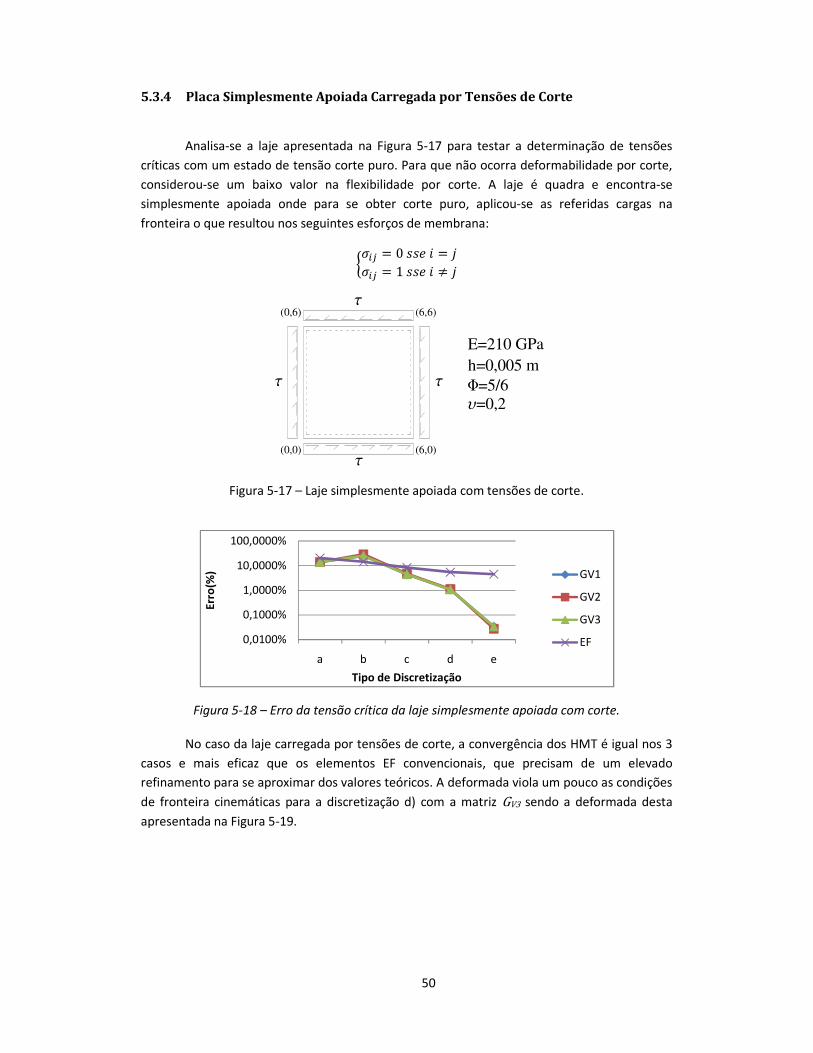
50
5.3.4 Placa Simplesmente Apoiada Carregada por Tensões de Corte
Analisa-se a laje apresentada na Figura 5-17 para testar a determinação de tensões
críticas com um estado de tensão corte puro. Para que não ocorra deformabilidade por corte,
considerou-se um baixo valor na flexibilidade por corte. A laje é quadra e encontra-se
simplesmente apoiada onde para se obter corte puro, aplicou-se as referidas cargas na
fronteira o que resultou nos seguintes esforços de membrana:
�~6ê � 0 �� H � ë~6ê � 1 �� H ì ë�
Figura 5-17 – Laje simplesmente apoiada com tensões de corte.
Figura 5-18 – Erro da tensão crítica da laje simplesmente apoiada com corte.
No caso da laje carregada por tensões de corte, a convergência dos HMT é igual nos 3
casos e mais eficaz que os elementos EF convencionais, que precisam de um elevado
refinamento para se aproximar dos valores teóricos. A deformada viola um pouco as condições
de fronteira cinemáticas para a discretização d) com a matriz GV3 sendo a deformada desta
apresentada na Figura 5-19.
t t
t
t
E=210 GPa
h=0,005 m
F=5/6u=0,2
(0,0)
(0,6)
(6,0)
(6,6)
0,0100%
0,1000%
1,0000%
10,0000%
100,0000%
a b c d e
Erro
(%)
Tipo de Discretização
GV1
GV2
GV3
EF

51
Figura 5-19 – Modo de encurvadura da laje simplesmente apoiada com corte.
5.3.5 Placa Rectangular Simplesmente Apoiada
Considera-se a laje apresentada na Figura 5-20 em conjunto com as suas
características geométricas e mecânicas. Para que não ocorra deformabilidade por corte,
considerou-se um baixo valor na flexibilidade por corte. A laje é rectangular longa e encontra-
se simplesmente apoiada com esforço de membrana constante segundo x.
Figura 5-20 – Laje rectangular simplesmente apoiada.
Figura 5-21 – Erro da tensão crítica da laje rectangular simplesmente apoiada.
No caso da laje carregada longa, os elementos EF convencionais apresentam maior
eficiência em relação aos HMT. No entanto ambos precisam de elevados refinamentos para
convergir para os valores teóricos
Neste caso verifica-se que as condições fronteira foram fortemente violadas. Isto é
devido a que a discretização adoptada não possuir um polinómio com um grau suficiente para
simular os pontos de inflexão do primeiro modo de vibração que se situam de 6 em 6 metros
(0,6)
(0,0)
(24,6)
(24,0)
s s
E=210 GPa
h=0,005 m
F=5/6u=0,2
1,0000%
10,0000%
100,0000%
a b c d e
Erro
(%)
Tipo de Discretização
GV1
GV2
GV3
EF
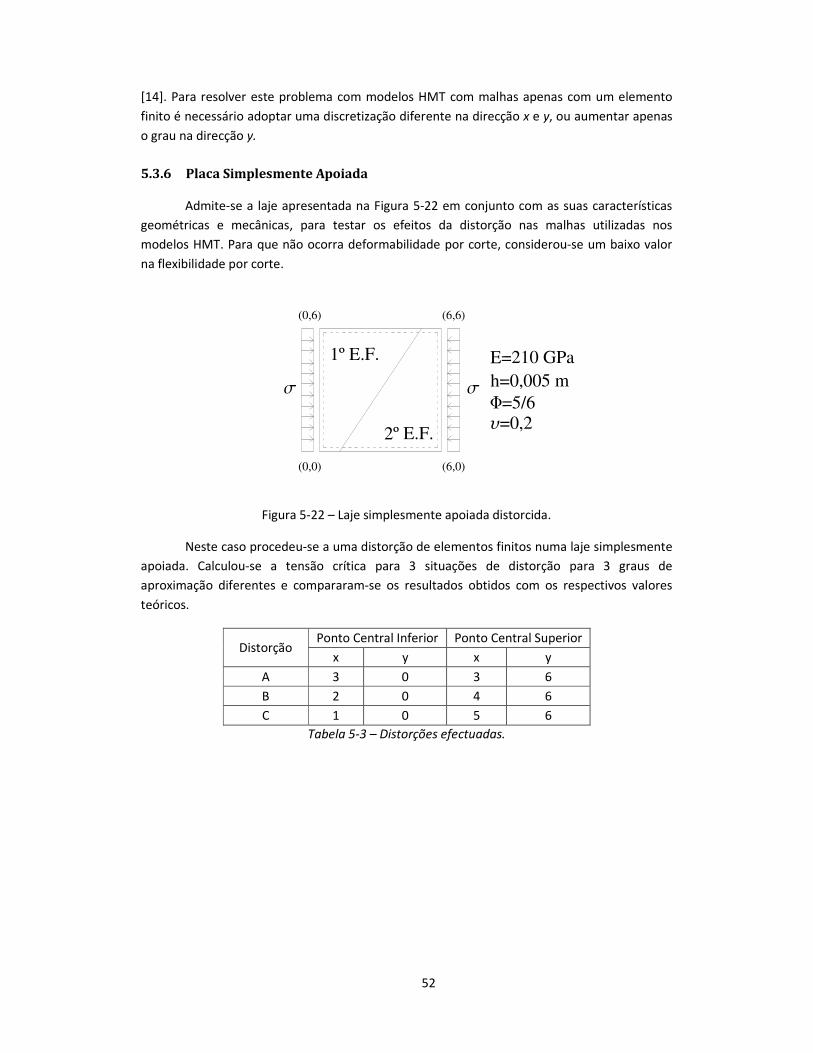
52
[14]. Para resolver este problema com modelos HMT com malhas apenas com um elemento
finito é necessário adoptar uma discretização diferente na direcção x e y, ou aumentar apenas
o grau na direcção y.
5.3.6 Placa Simplesmente Apoiada
Admite-se a laje apresentada na Figura 5-22 em conjunto com as suas características
geométricas e mecânicas, para testar os efeitos da distorção nas malhas utilizadas nos
modelos HMT. Para que não ocorra deformabilidade por corte, considerou-se um baixo valor
na flexibilidade por corte.
Figura 5-22 – Laje simplesmente apoiada distorcida.
Neste caso procedeu-se a uma distorção de elementos finitos numa laje simplesmente
apoiada. Calculou-se a tensão crítica para 3 situações de distorção para 3 graus de
aproximação diferentes e compararam-se os resultados obtidos com os respectivos valores
teóricos.
Distorção Ponto Central Inferior Ponto Central Superior
x y x y
A 3 0 3 6
B 2 0 4 6
C 1 0 5 6
Tabela 5-3 – Distorções efectuadas.
1º E.F.
2º E.F.
s s
E=210 GPa
h=0,005 m
F=5/6u=0,2
(0,0)
(0,6)
(6,0)
(6,6)
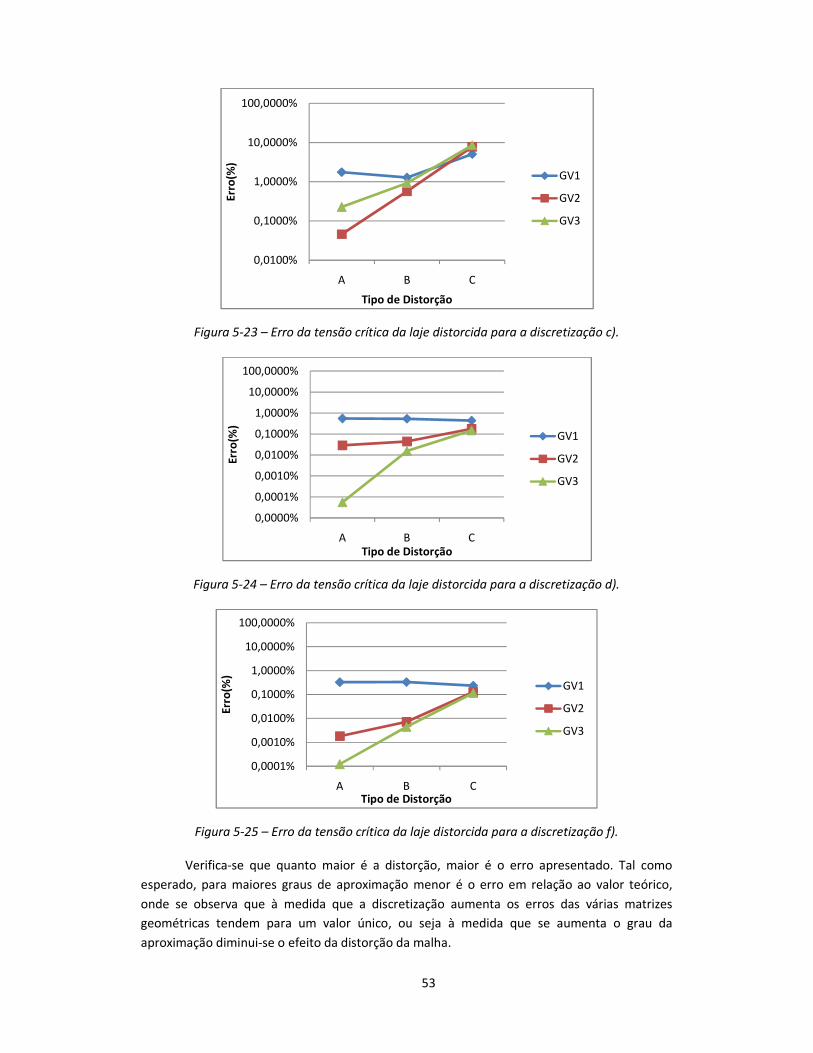
53
Figura 5-23 – Erro da tensão crítica da laje distorcida para a discretização c).
Figura 5-24 – Erro da tensão crítica da laje distorcida para a discretização d).
Figura 5-25 – Erro da tensão crítica da laje distorcida para a discretização f).
Verifica-se que quanto maior é a distorção, maior é o erro apresentado. Tal como
esperado, para maiores graus de aproximação menor é o erro em relação ao valor teórico,
onde se observa que à medida que a discretização aumenta os erros das várias matrizes
geométricas tendem para um valor único, ou seja à medida que se aumenta o grau da
aproximação diminui-se o efeito da distorção da malha.
0,0100%
0,1000%
1,0000%
10,0000%
100,0000%
A B C
Erro
(%)
Tipo de Distorção
GV1
GV2
GV3
0,0000%
0,0001%
0,0010%
0,0100%
0,1000%
1,0000%
10,0000%
100,0000%
A B C
Erro
(%)
Tipo de Distorção
GV1
GV2
GV3
0,0001%
0,0010%
0,0100%
0,1000%
1,0000%
10,0000%
100,0000%
A B C
Erro
(%)
Tipo de Distorção
GV1
GV2
GV3

54
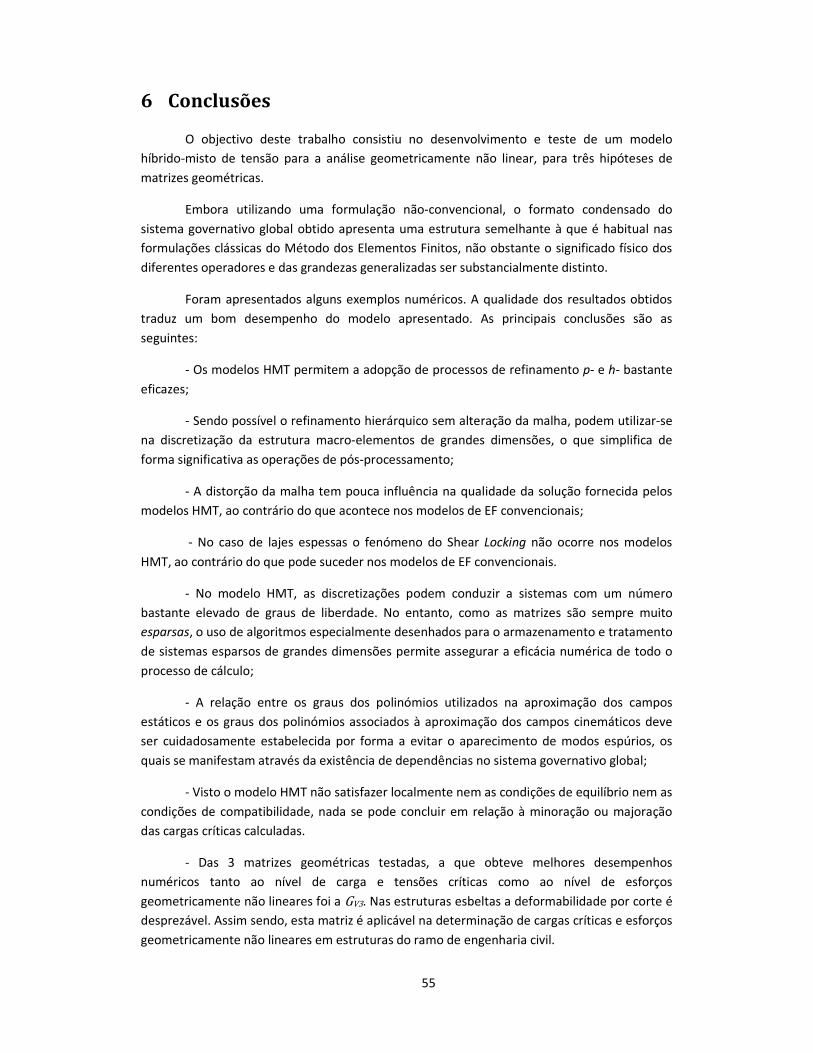
55
6 Conclusões
O objectivo deste trabalho consistiu no desenvolvimento e teste de um modelo
híbrido-misto de tensão para a análise geometricamente não linear, para três hipóteses de
matrizes geométricas.
Embora utilizando uma formulação não-convencional, o formato condensado do
sistema governativo global obtido apresenta uma estrutura semelhante à que é habitual nas
formulações clássicas do Método dos Elementos Finitos, não obstante o significado físico dos
diferentes operadores e das grandezas generalizadas ser substancialmente distinto.
Foram apresentados alguns exemplos numéricos. A qualidade dos resultados obtidos
traduz um bom desempenho do modelo apresentado. As principais conclusões são as
seguintes:
- Os modelos HMT permitem a adopção de processos de refinamento p- e h- bastante
eficazes;
- Sendo possível o refinamento hierárquico sem alteração da malha, podem utilizar-se
na discretização da estrutura macro-elementos de grandes dimensões, o que simplifica de
forma significativa as operações de pós-processamento;
- A distorção da malha tem pouca influência na qualidade da solução fornecida pelos
modelos HMT, ao contrário do que acontece nos modelos de EF convencionais;
- No caso de lajes espessas o fenómeno do Shear Locking não ocorre nos modelos
HMT, ao contrário do que pode suceder nos modelos de EF convencionais.
- No modelo HMT, as discretizações podem conduzir a sistemas com um número
bastante elevado de graus de liberdade. No entanto, como as matrizes são sempre muito
esparsas, o uso de algoritmos especialmente desenhados para o armazenamento e tratamento
de sistemas esparsos de grandes dimensões permite assegurar a eficácia numérica de todo o
processo de cálculo;
- A relação entre os graus dos polinómios utilizados na aproximação dos campos
estáticos e os graus dos polinómios associados à aproximação dos campos cinemáticos deve
ser cuidadosamente estabelecida por forma a evitar o aparecimento de modos espúrios, os
quais se manifestam através da existência de dependências no sistema governativo global;
- Visto o modelo HMT não satisfazer localmente nem as condições de equilíbrio nem as
condições de compatibilidade, nada se pode concluir em relação à minoração ou majoração
das cargas críticas calculadas.
- Das 3 matrizes geométricas testadas, a que obteve melhores desempenhos
numéricos tanto ao nível de carga e tensões críticas como ao nível de esforços
geometricamente não lineares foi a GV3. Nas estruturas esbeltas a deformabilidade por corte é
desprezável. Assim sendo, esta matriz é aplicável na determinação de cargas críticas e esforços
geometricamente não lineares em estruturas do ramo de engenharia civil.
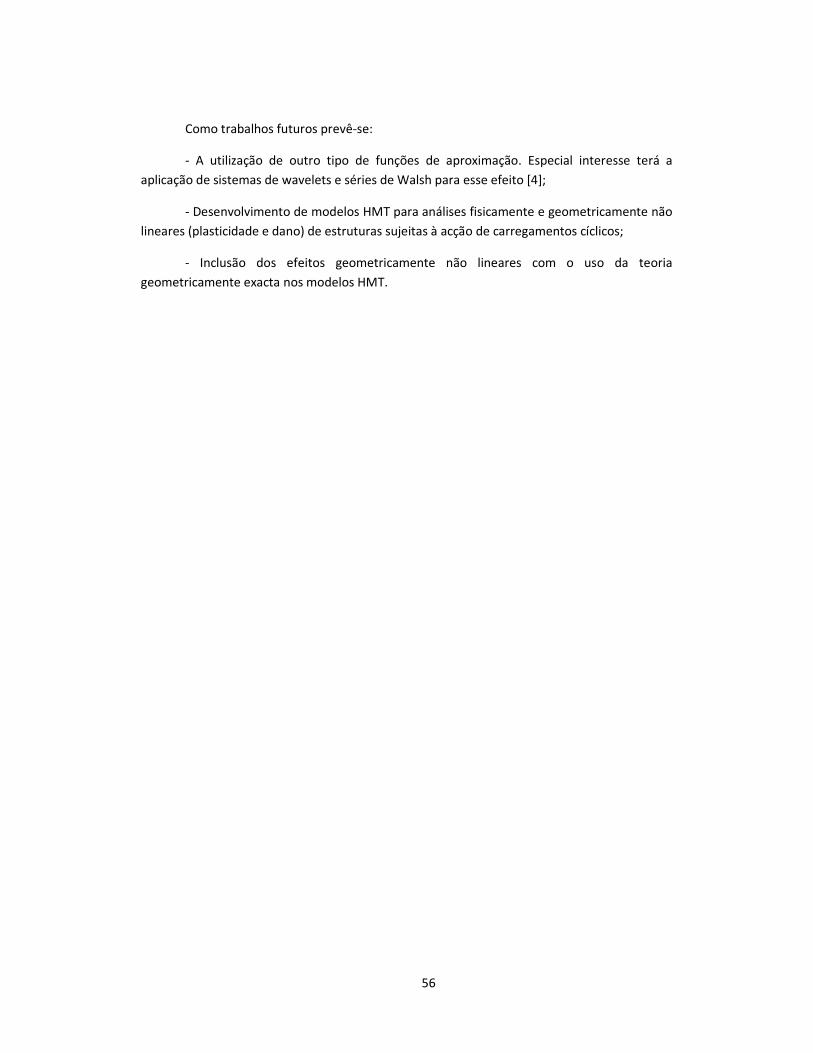
56
Como trabalhos futuros prevê-se:
- A utilização de outro tipo de funções de aproximação. Especial interesse terá a
aplicação de sistemas de wavelets e séries de Walsh para esse efeito [4];
- Desenvolvimento de modelos HMT para análises fisicamente e geometricamente não
lineares (plasticidade e dano) de estruturas sujeitas à acção de carregamentos cíclicos;
- Inclusão dos efeitos geometricamente não lineares com o uso da teoria
geometricamente exacta nos modelos HMT.
57
BIBLIOGRAFIA
[1] Almeida J.P.B.M, Freitas J.A.T., “Alternative approach to the formulation of hybrid
equilibrium finite elements”, Comput & Struct, 1991. [2] Arruda M.R.T.,” Análise Geometricamente não Linear de Pórticos Planos com Elementos
Finitos Híbridos-Mistos de Tensão”, www.civil.ist.utl.pt\~marruda\an_gnl.pdf. IST 2008. [3] Bathe K.J. “Finite Element Procedures In Engineering Analysis”, Prentice-Hall Englewood Cliffs, 1982. [4] Castro L.M.S.S., “Wavelets e Séries de Walsh em Elementos Finitos”, Tese para obtenção do grau de Doutor em Engenharia Civil, IST 1996. [5] Freitas J.A.T., “Análise Elástica de Estruturas”, Associação de Estudantes do IST, AEIST 1987. [6] Freitas J.A.T., “Duality and symmetry in mixed integral methods of elastostatics”, International Journal for Numerical Methods in Engineering, 28, pp. 1161-1179, 1989. [7] Freitas J.A.T., Almeida J.P.B e Pereira E.M.B.R., “Alternative Hybrid Formulations for the
Finite Element Method”, Proc. 7th World Congress Finite Element Method, pp. 264-271, Mónaco, 1993. [8] Mendes L.A.M., “Modelos de Elementos Finitos Híbridos Mistos de Tensão na Análise
Elastoplástica de Estruturas Laminares Planas”, Dissertação para obtenção do grau de Mestre em Engenharia de Estruturas, IST, 2002. [9] Pereira E.M.B.R., e J.A.T. Freitas, “A Hybrid-mixed Element Model Based on Legendre
Polynomials for Reissner-Mindlin Plates”, Computer Methods in Applied Mechanics in Engineering, pp. 111 - 126, 1996. [10] SAP2000, “Structural Analysis Program”, Nonlinear version 10.1.0 CSI, 1984-2009. [11] Timoshenko S.P. e Goodier J.N., “Theory of Elasticity”, 3ª edição, McGraw Hill International Book Company, Tóquio, 1970. [12] Timoshenko S.P. e Woinowsky-Krieger S., “Theory of Plates and Shells”, 2ª edição, McGraw-Hill International Book Company, Tóquio, 1970. [13] Timoshenko S.P. ., “Theory of elastic stability”, 2ª edição, New York : McGraw-Hill, 1961. [14] Reis A., Camotin D., “Estabilidade Estrutural”, Mcgraw-Hill. 2000. [15] Wang C.M., Wang C.Y., Reddy J.N., “Exact solutions for buckling of structural members” Boca Raton : CRC Press, c2005. [16] Zienkiewicz, Taylor, “The Finite Element Method”, Volume 1 2 e 3, 5ª Edição, Londres 2003. [17] The MathWorks, MatLab 2008a, www.mathworks.com

58
Anexo A
A.1 – Sistema Governativo dos HMT para Pórticos Planos
Definem-se agora as matrizes de aproximação e os operadores estruturais utilizados
na análise de pórticos planos, considerando polinómios ortonomais de Legendre como funções
de aproximação.
Polinómios de Legendre:
- Funções aproximação
A aproximação para o campo de esforços no domínio pode ser escrita na forma:
��� � !!!!"%Ú6(í) %�������kîï; %0 % %0 %
%0 % %Úê(í) %�������kðï; %0 %%0 % %0 % %Úñ(í) %�������kÁï; '(
((()
������������������������
� i �u6}I§ � 1�uêòI§ � 1�uñ}I§ � 1j���������ó
onde
nM – Grau máximo do Polinómio de Legendre para aproximação de M
nN – Grau máximo do Polinómio de Legendre para aproximação de N
nV – Grau máximo do Polinómio de Legendre para aproximação de V
A aproximação para o campo de deslocamentos no domínio vem dada por:
��v� � !!!!"%Ú6(í) %�������kôï; %0 % %0 %
%0 % %Úê(í) %�������kõï; %0 %%0 % %0 % %Úñ(í) %�������kѲï; '(
((()
�����������������������÷Á
� i��v6}I¤ � 1��vêòI� � 1��vñ}IѲ � 1j���������øÁ
onde
nw – Grau máximo do Polinómio de Legendre para aproximação de w
nu – Grau máximo do Polinómio de Legendre para aproximação de u
nθ – Grau máximo do Polinómio de Legendre para aproximação de θ
A aproximação para os campos de deslocamentos na fronteira é dada através de:

59
��Г� � i#¤BBBB#�BBBB#ѲBBBj � 71 0 00 1 00 0 18�������÷Г� 7�Г6�Гê�Гñ8���øГ
- Mudança de Base
Para se tirar partido da ortogonalidade dos polinómios de Legendre, a definição da
aproximação e o cálculo dos diferentes operadores estruturais vai ter de ser efectuada ao nível
de um elemento mestre.
Figura A.1 – Mudança de coordenadas no elemento barra
Exactamente como no caso dos elementos isoparamétricos da formulação clássica de
EF, utiliza-se a seguinte transformação de coordenadas (ver Figura A.1):
$ � $; � ²; � $< � ²< onde l²; � ;< (1 % í)²< � ;< (1 % í)� Usando a regra da derivada da função composta:
#²#$ � #²#í � #í#$ onde #$#í � 2 © #í#$ � 2
Tendo em conta a definição das aproximações e a necessária mudança de
coordenadas, os operadores estruturais são agora definidos da seguinte forma:
- Matriz F
O operador de flexibilidade generalizado no domínio é dado pela seguinte forma:
: � | t ±° ($)�t($)#$ � | t ;
�; (í)�t(í) #$#í #í � 2| t ;�; (í)�t(í)#í
x1
x2
L
x=-1 x=0 x=1
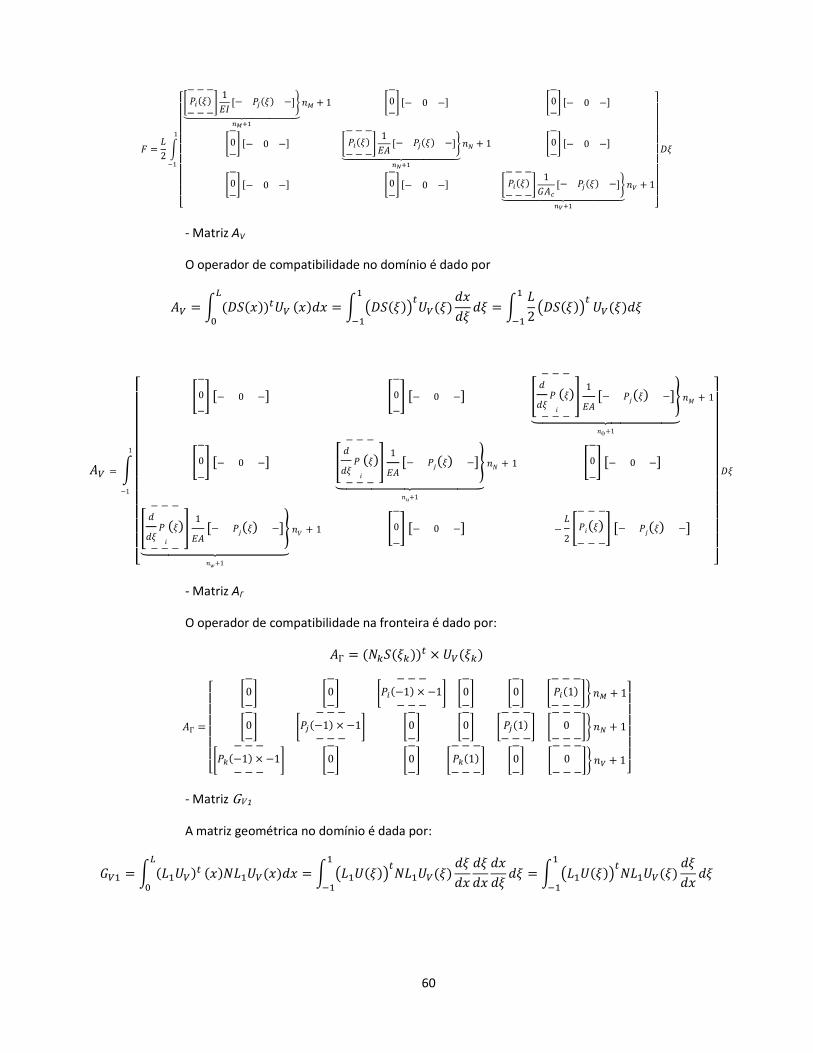
60
: � 2 |
!!!!!!!!!"�ù
% % %Ú6(í)% % %ú 1,- �% Úê(í) %���������������������kîï;I§ � 1 ù%0%ú �% 0 %� ù%0%ú �% 0 %�
ù%0%ú �% 0 %� �ù% % %Ú6(í)% % %ú 1,. �% Úê(í) %���������������������kðï;I¦ � 1 ù%0%ú �% 0 %�
ù%0%ú �% 0 %� ù%0%ú �% 0 %� �ù% % %Ú6(í)% % %ú 1/.Û �% Úê(í) %���������������������kÁï;Iv � 1'((
((((((()�í;
�;
- Matriz AV
O operador de compatibilidade no domínio é dado por
.v � | (�t($)) wv±° ($)#$ � | Ç�t(í)È wv(í);
�;#$#í #í � | 2 Ç�t(í)È ;
�; wv(í)#í
.v � |
!!!!!!!!!!!" ù%0%ú �% 0 %� ù%0%ú �% 0 %� �7 % % %##í ÚH(í)% % % 8 1,. �% Úë(í) %�������������������
IѲ�1I� � 1
ù%0%ú �% 0 %� �7 % % %##í ÚH(í)% % % 8 1,. �% Úë(í) %�������������������I��1
I� � 1 ù%0%ú �% 0 %��7 % % %##í ÚH(í)% % % 8 1,. �% Úë(í) %�������������������
I��1I� � 1 ù%0%ú �% 0 %� % 2 ù% % %ÚH(í)% % %ú �% Úë(í) %�
'((((((((((()
�í1
%1
- Matriz AΓ
O operador de compatibilidade na fronteira é dado por:
.Г � (�ñt(íñ)) � wv(íñ)
.Г � !!!!!!" ù%0%ú ù%0%ú ù % % %Ú6(%1) � %1% % % ú
ù%0%ú ù % % %Úê(%1) � %1% % % ú ù%0%úù % % %Úñ(%1) � %1% % % ú ù%0%ú ù%0%ú
ù%0%ú ù%0%ú �ù% % %Ú6(1)% % %ú� I§ � 1ù%0%ú ù% % %Úê(1)% % %ú �ù% % %0% % %ú� I¦ � 1
ù% % %Úñ(1)% % %ú ù%0%ú �ù% % %0% % %ú� Iv � 1'(((((()
- Matriz GV 1
A matriz geométrica no domínio é dada por:
/v; � | (;wv) ±° ($)�;wv($)#$ � | Ç;w(í)È �;wv(í) #í#$ #í#$ #$#í #í;
�; � | Ç;w(í)È �;wv(í) #í#$ #í;�;
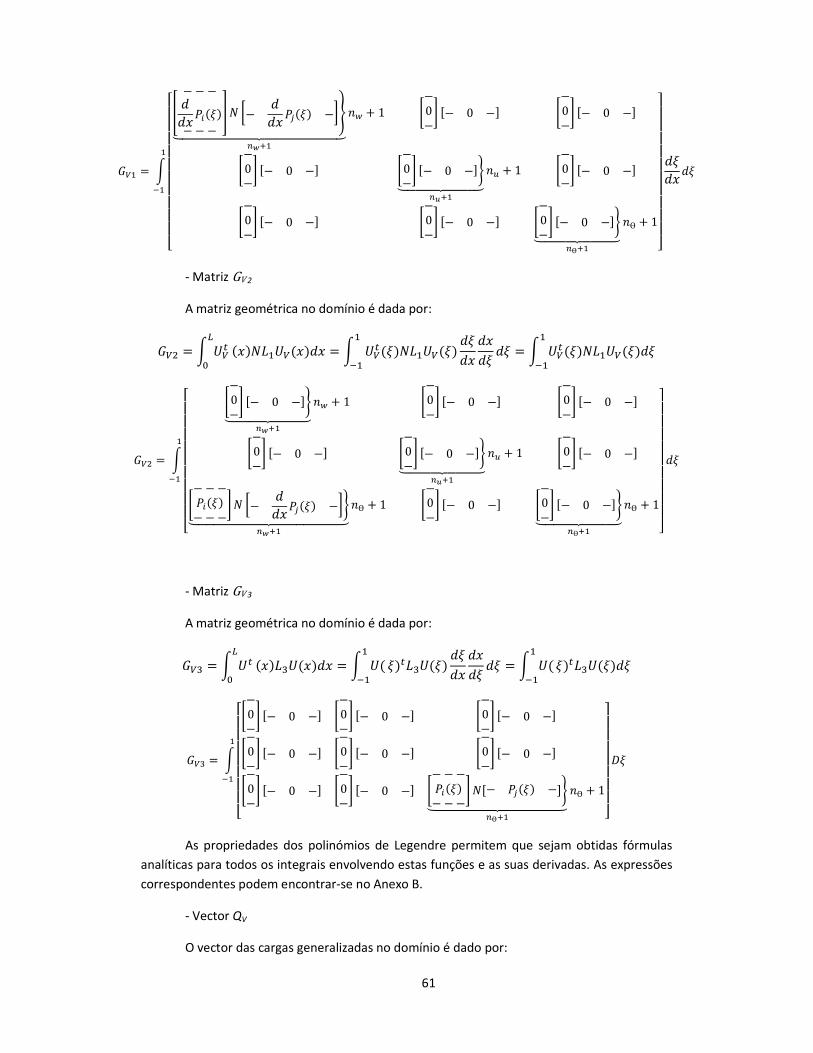
61
/v; � |
!!!!!!!!!!"�i % % %##$Ú6(í)% % % j� �% ##$Úê(í) %�m�����������������������kôï;
I¤ � 1 ù%0%ú �% 0 %� ù%0%ú �% 0 %�ù%0%ú �% 0 %� �ù%0%ú �% 0 %�������������kõï;
I� � 1 ù%0%ú �% 0 %�ù%0%ú �% 0 %� ù%0%ú �% 0 %� �ù%0%ú �% 0 %�������������kѲï;
IѲ � 1'(((((((((()#í#$#í;
�;
- Matriz GV 2
A matriz geométrica no domínio é dada por:
/v< � | wv ±° ($)�;wv($)#$ � | wv (í)�;wv(í) #í#$ #$#í #í;
�; � | wv (í)�;wv(í)#í;�;
/v< � |
!!!!!!!!!" �ù%0%ú �% 0 %�������������kôï;
I¤ � 1 ù%0%ú �% 0 %� ù%0%ú �% 0 %�ù%0%ú �% 0 %� �ù%0%ú �% 0 %�������������kõï;
I� � 1 ù%0%ú �% 0 %��ù% % %Ú6(í)% % %ú� �% ##$Úê(í) %�����������������������kôï;
IѲ � 1 ù%0%ú �% 0 %� �ù%0%ú �% 0 %�������������kѲï;IѲ � 1'(
(((((((()#í;
�;
- Matriz GV 3
A matriz geométrica no domínio é dada por:
/v= � | w ±° ($)=w($)#$ � | w(;
�; í) =w(í) #í#$ #$#í #í � | w(;�; í) =w(í)#í
/v= � | !!!!!!!"ù
%0%ú �% 0 %� ù%0%ú �% 0 %� ù%0%ú �% 0 %�ù%0%ú �% 0 %� ù%0%ú �% 0 %� ù%0%ú �% 0 %�ù%0%ú �% 0 %� ù%0%ú �% 0 %� �ù% % %Ú6(í)% % %ú��% Úê(í) %�������������������kѲï;
IѲ � 1'((((((() �í;
�;
As propriedades dos polinómios de Legendre permitem que sejam obtidas fórmulas
analíticas para todos os integrais envolvendo estas funções e as suas derivadas. As expressões
correspondentes podem encontrar-se no Anexo B.
- Vector QV
O vector das cargas generalizadas no domínio é dado por:

62
}v � | wv ±° ($)�($)#$ � | wv (;
�; í)�(í) #$#í #í � 2| wv (í);�; �(í)#í
ou seja,
}v � | 2 !!!!!!" �% % %Ú6(í)�% % %�I¤ � 1�% % %Úê(í)�% % %�I� � 1� % % %Úñ(í)�% % % �IѲ � 1'((
(((();
�; #í
Quando se consideram cargas constantes, apenas é diferente de 0 o termo que
envolve o polinómio P0. Tal como indicado no Anexo B, tem-se neste caso:
| Ú°(í)#;�; í � √2
- Vector QΓ
As cargas generalizadas aplicadas na fronteira são dadas por:
}Г � 7�°�°�°8
- Montagem do sistema governativo
Na montagem do sistema governativo global, o que difere em relação aos EF
convencionais é que as matrizes F e AV são espalhadas de forma independente para cada
elemento. Apenas a matriz AΓ é espalhada tendo em conta os elementos vizinhos e as
condições de fronteira.
O número de colunas da matriz AΓ está associado ao número de deslocamentos
independentes nas fronteiras de cada elemento, cuja identificação é em tudo semelhante ao
dos EF convencionais. Apenas entram na matriz AΓ do sistema governativo global as colunas da
matriz AΓ do elemento isolado associadas ao grau de liberdade global. Para ilustrar este
processo de espalhamento considere-se o exemplo representado na Figura A.2.
Figura A.2 – Barra utilizada para ilustrar a montagem do sistema governativo
Temos 2 EF
×
×⇒
)22( de blocos 2
)22( de blocos 2
VA
F
d2
d1
d3
d4
q3
q2
q6
q5
q1 q4Gs1 Gs2
(a) (b)

63
Temos 2 σ
Γ com 2 EF )22( de blocos 2por blocos 2 ×⇒Γ
A
A relação entre os graus de liberdade elementares e os graus de liberdade globais é
dada pela seguinte tabela de incidências:
,ü�I�F �; �< �= �> �? �@ý % % % % #; #<� % #; #< % #> #=
O sistema governativo global tem o seguinte formato:
!!!!"
:þ 0 .vþ 0 %.Гþ; 00 :� 0 .v�0 %.Г�; %.Г�<.vþ 0 0 0 0 0%.Гþ; %.Г�; 0 0 0 00 %.Г�< 0 0 0 0 '(((()
Para a matriz AΓa1 entram a 5ª e 6ª coluna de AΓa, para AΓb1 entra a 2ª e 3ª coluna de AΓb e para AΓb2 entram a5ª e6ª coluna de AΓb. Apesar de X e qv não terem significado físico
imediato, isso já não contece com qΓ que está associado aos graus de liberdade. Neste caso
�Г; � �#;#<� �Г< � �#>#=�

64
A.2 – Sistema Governativo dos HMT para Lajes
As definições das matrizes de aproximação e os operadores estruturais utilizados na
análise de lajes encontram-se detalhadas em [8]. Neste anexo apenas se apresenta as
definições das matrizes geométricas com os HMT.
- Matriz GV 1
/v; � | !!!!!!!!"�ù
%0%ú �% 0 %�������������kôï;I¤ � 1 ù%0%ú �% 0 %� ù%0%ú �% 0 %�
ù%0%ú �% 0 %� �ù%0%ú �% 0 %�������������kõï;I� � 1 ù%0%ú �% 0 %�
ù%0%ú �% 0 %� ù%0%ú �% 0 %� �/}�kѲï; IѲ � 1 '(((((((()d�
onde:
/ � b�Û���kþb$ I\ b��6k�þ�b$ � b�Û���kþbc I]\ b��6k�þ�b$ � b�Û���kþb$ I]\ b��6k�þ�bc b�Û���kþbc I] b��6k�þ�bc
Os detalhes das mudanças de coordenadas em elementos isoparametricos para as
lajes com os HMT encontra-se detalhadas em [8]. Usando as respectivas mudanças de
coordenadas vai se chegar a um novo operador diferencial:
bb$ � bbí bíb$ � bb bb$ e bbc � bbí bíbc � bb bbc
As deduções do valores de A, B ,C e D provem da matriz AV (neste trabalho os índices
são omitidos para simplificar as formulas) e encontram-se detalhados em [8], obtendo-se
assim 4 casos diferentes para o calculo da matriz geométrica
1º caso £ ��\ . ��\¥
bbí .<|�|< bbí�������I»�¼´½¶· ;
% bbí .�|�|< bb�������I»�¼´½¶· <% bb .�|�|< bbí�������I»�¼´½¶· =
� bb �<|�|< bb�������I»�¼´½¶· >
Integral tipo 1:
| | bÚ6(í)bí;�;
;�;
.<|�|< bÚ�(í)bí Úê()Úk()|�|#í#
Integral tipo 2:
| | bÚ6(í)bí;�;
;�;
.�|�|< Ú�(í) bÚk()b Úê()|�|#í#
Integral tipo 3:
| | bÚê()b;�;
;�;
.�|�|< Úk() bÚ�(í)bí Ú6(í)|�|#í#
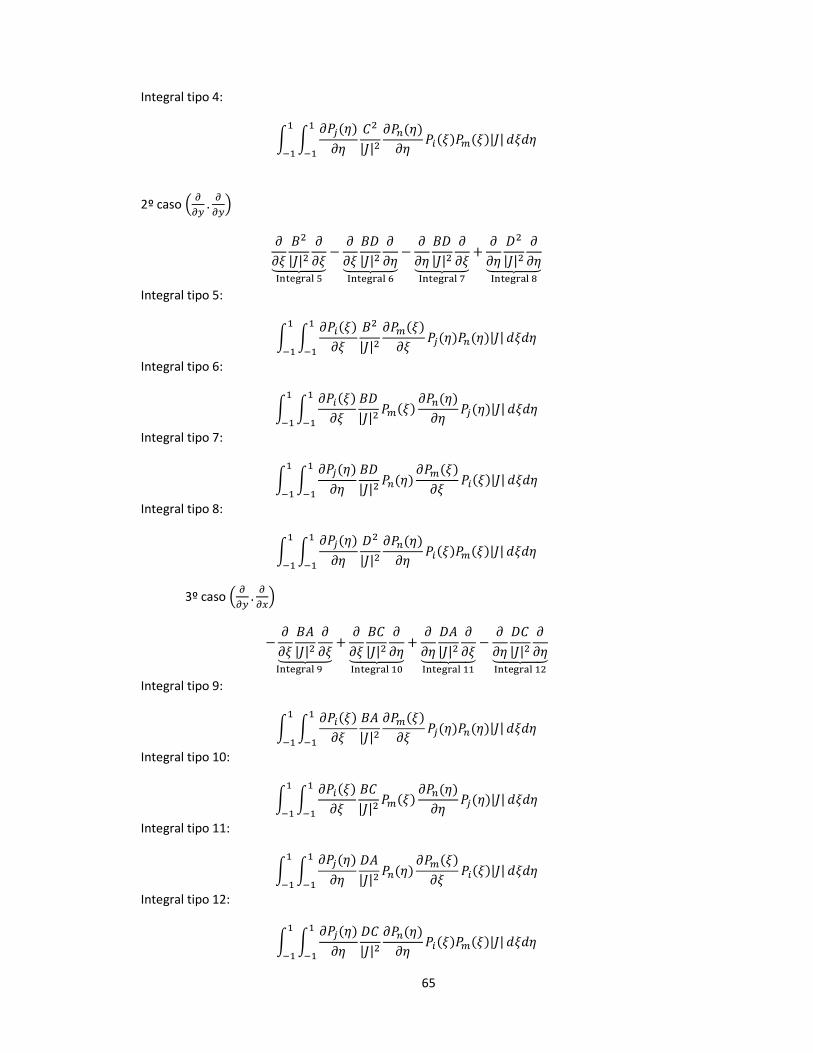
65
Integral tipo 4:
| | bÚê()b;�;
;�;
�<|�|< bÚk()b Ú6(í)Ú�(í)|�|#í#
2º caso £ ��] . ��]¥
bbí �<|�|< bbí�������I»�¼´½¶· ?
% bbí ��|�|< bb�������I»�¼´½¶· @% bb ��|�|< bbí�������I»�¼´½¶· �
� bb �<|�|< bb�������I»�¼´½¶· �
Integral tipo 5:
| | bÚ6(í)bí;�;
;�;
�<|�|< bÚ�(í)bí Úê()Úk()|�|#í#
Integral tipo 6:
| | bÚ6(í)bí;�;
;�;
��|�|< Ú�(í) bÚk()b Úê()|�|#í#
Integral tipo 7:
| | bÚê()b;�;
;�;
��|�|< Úk() bÚ�(í)bí Ú6(í)|�|#í#
Integral tipo 8:
| | bÚê()b;�;
;�;
�<|�|< bÚk()b Ú6(í)Ú�(í)|�|#í#
3º caso £ ��] . ��\¥
% bbí �.|�|< bbí�������I»�¼´½¶· �� bbí ��|�|< bb�������I»�¼´½¶· ;°
� bb �.|�|< bbí�������I»�¼´½¶· ;;% bb ��|�|< bb�������I»�¼´½¶· ;<
Integral tipo 9:
| | bÚ6(í)bí;�;
;�;
�.|�|< bÚ�(í)bí Úê()Úk()|�|#í#
Integral tipo 10:
| | bÚ6(í)bí;�;
;�;
��|�|< Ú�(í) bÚk()b Úê()|�|#í#
Integral tipo 11:
| | bÚê()b;�;
;�;
�.|�|< Úk() bÚ�(í)bí Ú6(í)|�|#í#
Integral tipo 12:
| | bÚê()b;�;
;�;
��|�|< bÚk()b Ú6(í)Ú�(í)|�|#í#

66
4º caso £ ��\ . ��]¥
% bbí �.|�|< bbí�������I»�¼´½¶· �� bb ��|�|< bbí�������I»�¼´½¶· ;=
� bbí �.|�|< bb�������I»�¼´½¶· ;>% bb ��|�|< bb�������I»�¼´½¶· ;<
Integral tipo 13:
| | bÚê()b;�;
;�;
��|�|< Úk() bÚ�(í)bí Ú6(í)|�|#í#
Integral tipo 14:
| | bÚ6(í)bí;�;
;�;
�.|�|< Ú�(í) bÚk()b Úê()|�|#í#
Verifica-se que em geral integrar analiticamente a matriz geométrica como até tem
sido feito com todos os operadores dos HMT é impossível. Isto deve-se a que o integral fica
inversamente proporcional ao valor do Jacobiano:
/v;6ê � | | �(í, ) 1|�(í, )|#í#;�;
;�;
Este apenas é possível integrar analiticamente quando elemento finito não se encontra
distorcido. Assim sendo é necessário executar uma integração numérica com pontos de Gauss
no plano como referido em [3].
- Matriz GV 2
Exactamente como na matriz geométrica anterior definida, também nesta é necessário
executar uma mudança de coordenadas, ficando assim definida a matriz GV2.
/v< � |
!!!!!!!!!"�ù
%0%ú �% 0 %�������������kôï;I¤ � 1 ù%0%ú �% 0 %� /;,=
ù%0%ú �% 0 %� �ù%0%ú �% 0 %�������������kõï;I� � 1 /<,=
ù%0%ú �% 0 %� ù%0%ú �% 0 %� �ù%0%ú �% 0 %�������������kѲï;IѲ � 1'((
((((((()#�
/;,= � I\�\Û���kþ b��6k�þbí .|�|% I\�\Û���kþ b��6k�þb %�|�| %I]\�\Û���kþ b��6k�þbí %�|�|� I]\�\Û���kþ b��6k�þb �|�|

67
/;,= � I]\�]Û���kþ b��6k�þbí .|�|% I]\�]Û���kþ b��6k�þb %�|�| %I]�]Û���kþ b��6k�þbí %�|�|� I]�]Û���kþ b��6k�þb �|�| - Matriz GV 3
Exactamente como na matriz geométrica anterior definida, também nesta é necessário
executar uma mudança de coordenadas, ficando assim definida a matriz GV3.
/v= � | !!!!!!!" �%/;,;ò���kôï; I¤ � 1 %/;,< ù%0%ú �% 0 %�
%/<,; �%/<,<ò���kõï; I� � 1 ù%0%ú �% 0 %�ù%0%ú �% 0 %� ù%0%ú �% 0 %� �ù%0%ú �% 0 %�������������kѲï;
IѲ � 1'((((((()#�
/;,; � | | Ú6(í)Úê()I\Ú�(í)Úk()|�| #í#;�;
;�;
/<,; � | | Ú6(í)Úê()I]\Ú�(í)Úk()|�|#í#;�;
;�;
/;,< � | | Ú6(í)Úê()I]\Ú�(í)Úk()|�|#í#;�;
;�;
/<,< � | | Ú6(í)Úê()I]Ú�(í)Úk()|�|#í#;�;
;�;

68
Anexo B
B.1 – Polinómios de Legendre
Apresenta-se neste anexo a informação necessária para a definição dos polinómios de
Legendre. Discutem-se as suas propriedades mais relevantes e listam-se as expressões que
permitem efectuar o cálculo analítico de todos os integrais envolvendo estas funções e as suas
derivadas.
B.1.2 – Considerações Iniciais
Os polinómios de Legendre de ordem n, Pn(x), correspondem às soluções da equação
diferencial de Legendre:
(1 % $<) � #<Úk($)#$< % 2 � $ � #Úk($)#$ � I � (I � 1) � Úk($) � 0 Somos desta forma conduzidos à definição de funções do tipo polinomial, que podem
ser geradas pela fórmula de Rodriguez
Úk($) � 12k I! � #k#$k ($< % 1)k B.1.3 – Propriedades dos Polinómios de Legendre
Verifica-se que polinómios de grau consecutivo são alternadamente funções pares e
ímpares Úk(%$) � (%1)k Úk($)
Os integrais definidos no intervalo [-1,1] do produto de dois polinómios de Legendre
podem ser calculados a partir das igualdades:
XYZY[| Úk($)Ú�($)#$ � 0 � I ì �;
�;| Úk($)Ú�($)#$ � 22I � 1 � I ì �;�;
� Assim sendo, conclui-se que os polinómios de Legendre são ortogonais no intervalo [-
1,1]
B.1.4 – Formulas Geradoras dos Polinómios de Legendre
Várias fórmulas podem ser utilizadas para gerar os polinómios de Legendre,
correspondendo a maioria a fórmulas de recorrência
#Úkï;($)#$ % $ � #Úk($)#$ � (I � 1) � Úk($)

69
$ � #Úk($)#$ % #Úk�;($)#$ � I � Úk($) #Úkï;($)#$ % #Úk($)#$ � (2I � 1) � Úk($)
($< % 1) � #Úk($)#$ � I � $ � Úk($) % I � Úk�;($)
Assim sendo, é possível usar a seguinte sucessão para determinar os valores de Pn(x)
(I � 1) � Úk�;($) % (2I � 1) � $ � Úk($) � I � Úk�;($) � 0 com P0(x)=1 e
P1(x)=x.
Por forma a que se verifique a condição de ortonormalidade:
| (Úk($);�; )<#$ � 1
A fórmula de Bonnet é escalada por λn;
Ïk � �2I � 12
Obtem-se deste modo o formato alternativo
I � 1Ïk�; � Úk�;($) � 2I � 1Ïk � Úk($) % IÏk�; � Úk�;($)
EF� Ú°($) � Ï° Ú;($) � Ï; � $
Na Figura apresentam-se os polinómios de Legendre unidimensionais de grau igual ou
inferior a 14.
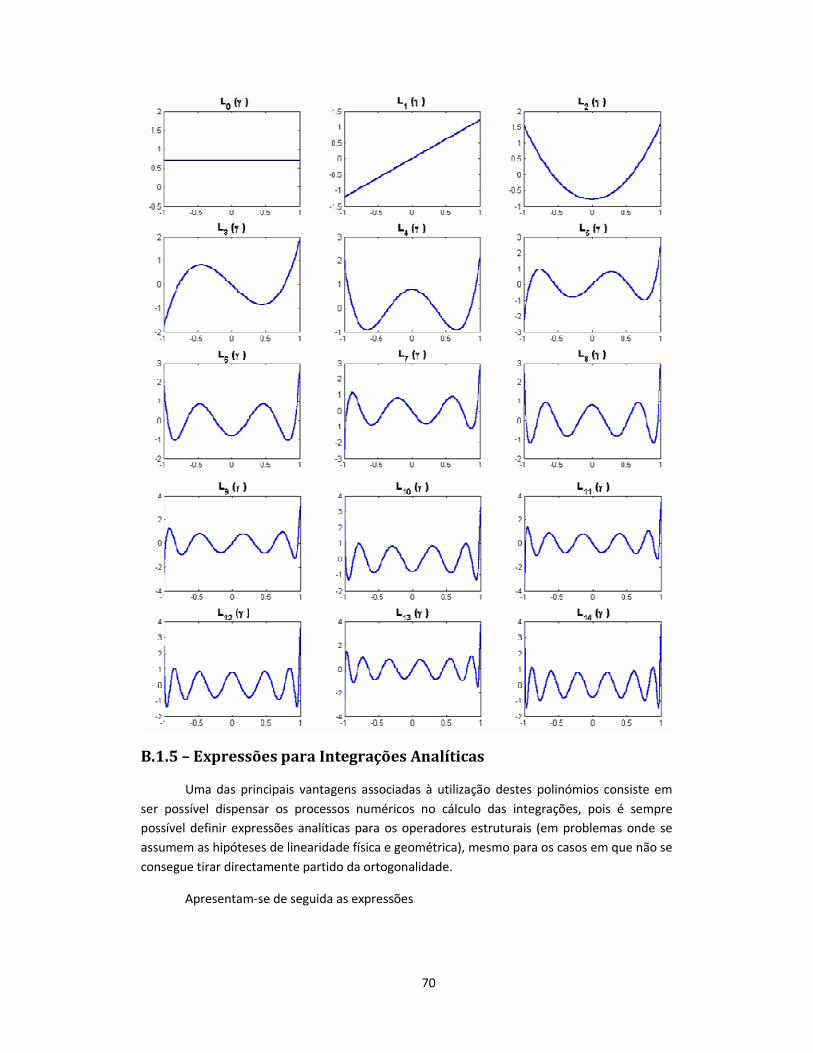
70
B.1.5 – Expressões para Integrações Analíticas
Uma das principais vantagens associadas à utilização destes polinómios consiste em
ser possível dispensar os processos numéricos no cálculo das integrações, pois é sempre
possível definir expressões analíticas para os operadores estruturais (em problemas onde se
assumem as hipóteses de linearidade física e geométrica), mesmo para os casos em que não se
consegue tirar directamente partido da ortogonalidade.
Apresentam-se de seguida as expressões
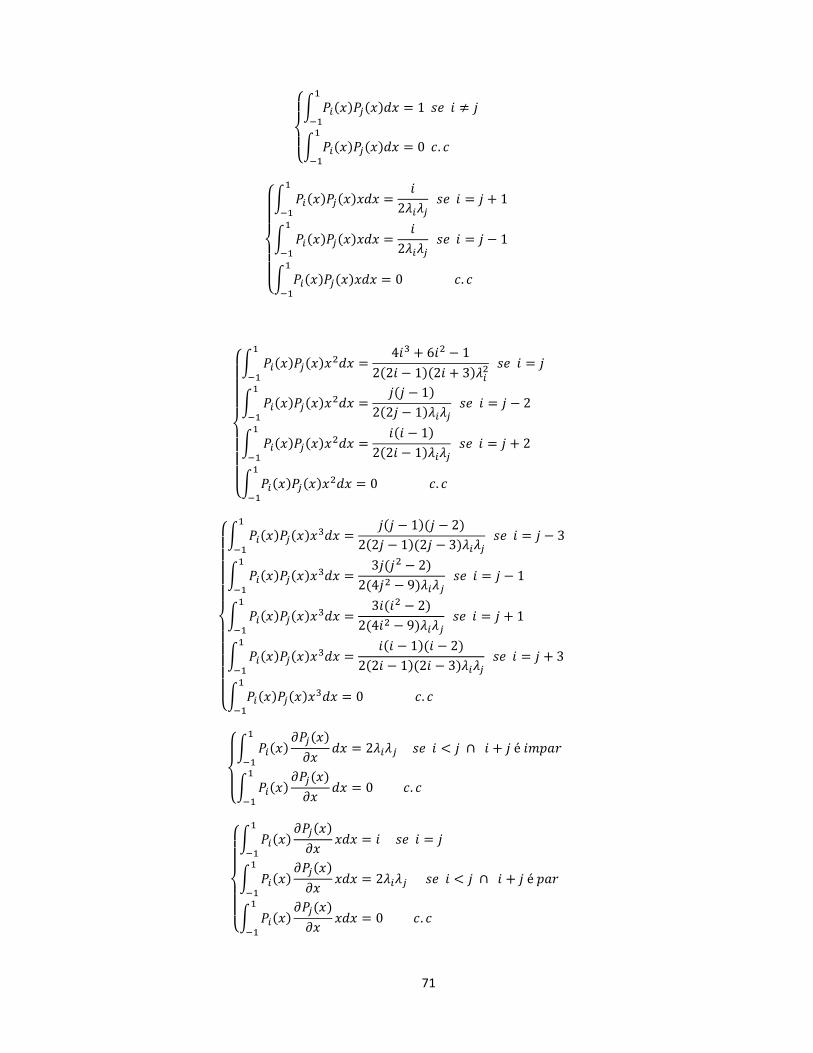
71
XYZY[| Ú6($)Úê($)#$ � 1 � H ì ë ;
�;| Ú6($)Úê($)#$ � 0 E. E ;�;
�
XYYZYY[| Ú6($)Úê($)$#$ � H2Ï6Ïê � H � ë � 1 ;
�;| Ú6($)Úê($)$#$ � H2Ï6Ïê � H � ë % 1 ;�;| Ú6($)Úê($)$#$ � 0 E. E ;�;
�
XYYYZYYY[| Ú6($)Úê($)$<#$ � 4H= � 6H< % 12(2H % 1)(2H � 3)Ï6< � H � ë ;
�;| Ú6($)Úê($)$<#$ � ë(ë % 1)2(2ë % 1)Ï6Ïê � H � ë % 2 ;�;| Ú6($)Úê($)$<#$ � H(H % 1)2(2H % 1)Ï6Ïê � H � ë � 2 ;�;| Ú6($)Úê($)$<#$ � 0 E. E ;�;
�
XYYYYYZYYYYY[| Ú6($)Úê($)$=#$ � ë(ë % 1)(ë % 2)2(2ë % 1)(2ë % 3)Ï6Ïê � H � ë % 3 ;
�;| Ú6($)Úê($)$=#$ � 3ë(ë< % 2)2(4ë< % 9)Ï6Ïê � H � ë % 1 ;�;| Ú6($)Úê($)$=#$ � 3H(H< % 2)2(4H< % 9)Ï6Ïê � H � ë � 1 ;�;| Ú6($)Úê($)$=#$ � H(H % 1)(H % 2)2(2H % 1)(2H % 3)Ï6Ïê � H � ë � 3 ;�;| Ú6($)Úê($)$=#$ � 0 E. E ;�;
�
XYZY[| Ú6($) bÚê($)b$ #$ � 2Ï6Ïê � H � ë � H � ë é H��ýâ ;
�;| Ú6($) bÚê($)b$ #$ � 0 E. E ;�;
�
XYYZYY[| Ú6($) bÚê($)b$ $#$ � H � H � ë ;
�;| Ú6($) bÚê($)b$ $#$ � 2Ï6Ïê � H � ë � H � ë é �ýâ ;�;| Ú6($) bÚê($)b$ $#$ � 0 E. E ;�;
�
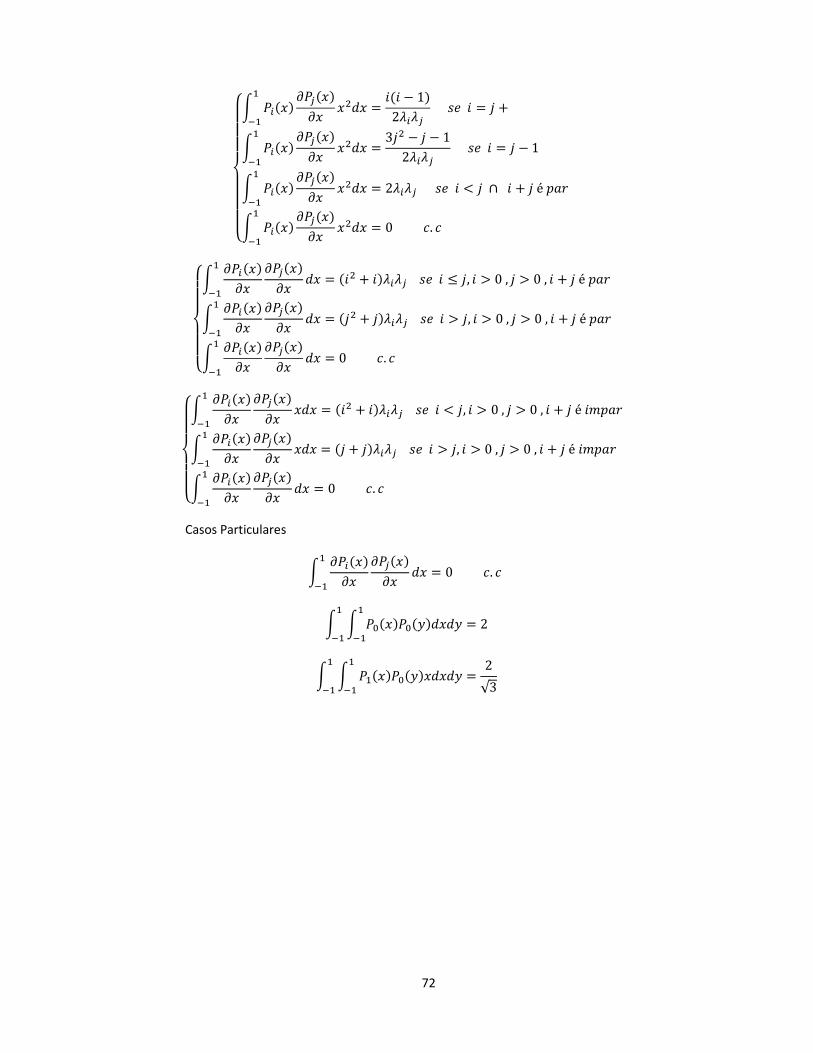
72
XYYYZYYY[| Ú6($) bÚê($)b$ $<#$ � H(H % 1)2Ï6Ïê � H � ë � ;
�;| Ú6($) bÚê($)b$ $<#$ � 3ë< % ë % 12Ï6Ïê � H � ë % 1 ;�;| Ú6($) bÚê($)b$ $<#$ � 2Ï6Ïê � H � ë � H � ë é �ýâ ;�;| Ú6($) bÚê($)b$ $<#$ � 0 E. E ;�;
�
XYYZYY[| bÚ6($)b$ bÚê($)b$ #$ � (H< � H)Ï6Ïê � H � ë, H � 0 , ë � 0 , H � ë é �ýâ ;
�;| bÚ6($)b$ bÚê($)b$ #$ � (ë< � ë)Ï6Ïê � H � ë, H � 0 , ë � 0 , H � ë é �ýâ ;�;| bÚ6($)b$ bÚê($)b$ #$ � 0 E. E ;�;
�
XYYZYY[| bÚ6($)b$ bÚê($)b$ $#$ � (H< � H)Ï6Ïê � H � ë, H � 0 , ë � 0 , H � ë é H��ýâ ;
�;| bÚ6($)b$ bÚê($)b$ $#$ � (ë � ë)Ï6Ïê � H � ë, H � 0 , ë � 0 , H � ë é H��ýâ ;�;| bÚ6($)b$ bÚê($)b$ #$ � 0 E. E ;�;
�
Casos Particulares
| bÚ6($)b$ bÚê($)b$ #$ � 0 E. E ;�;
| | Ú°($)Ú°(c)#$#c � 2;�;
;�;
| | Ú;($)Ú°(c)$#$#c � 2√3;�;
;�;

73
Anexo C
C.1 – Formulas e Teoremas
C.1.1 – Divergência de um Campo Vectorial
Seja v(x,y,z)�(v1(x,y,z), v2(x,y,z), v3(x,y,z)) uma função vectorial diferenciável.
Define-se a divergência {v} do campo vectorial através de [58]:
#H^({^}) � b^;b$ � b^<b$ � b^=b$
C.1.2 – Teorema da Divergência
Seja (S) uma superfície fechada que encerra o domínio (V), definida em cada ponto
com um único vector normal e exterior (n). Seja v(x,y,z)�(v1(x,y,z), v2(x,y,z), v3(x,y,z)) uma
função vectorial diferenciável. Demonstra-se que:
|#H^ ({^})#� � |{^} �I�#t
C.1.3 – Mudança de Referencial
Seja f uma função diferenciável em todo o seu domínio. Pode demonstrar-se que:
a) no caso do eixo linear com x�x(ξ) para um eixo (ξ) isoparamétrico mestre
| �($)\<\; #$ � | �($(í))\<
\;#$(í)#í #í � | �(í);
�;#$(í)#í #í
b) no caso do plano com (x,y)�(x(ξ,η),y(ξ,η)) para um domínio (ξ,η) isoparamétrico
mestre
| | �($, c)]<]; #$#c\<
\; � | | �($(í, ), c(í, ))|�(í, )|�<�; #í# <
; � | | �(í, );�; |�(í, )|#í#;
�;
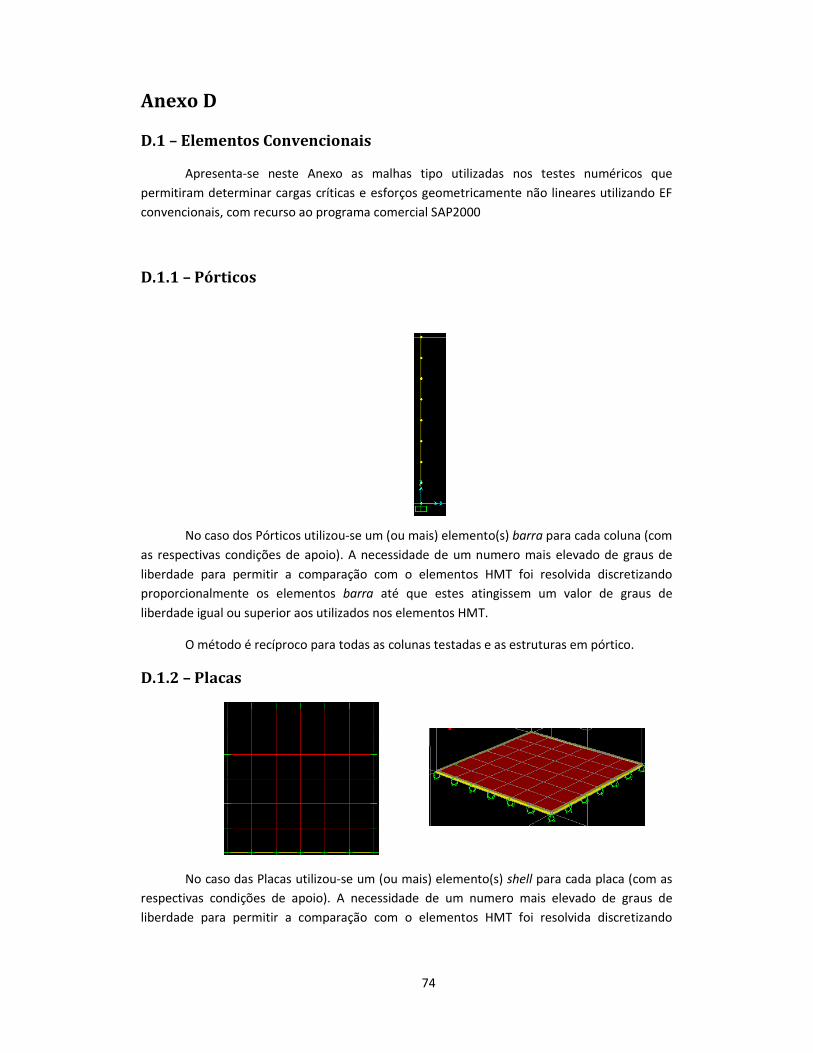
74
Anexo D
D.1 – Elementos Convencionais
Apresenta-se neste Anexo as malhas tipo utilizadas nos testes numéricos que
permitiram determinar cargas críticas e esforços geometricamente não lineares utilizando EF
convencionais, com recurso ao programa comercial SAP2000
D.1.1 – Pórticos
No caso dos Pórticos utilizou-se um (ou mais) elemento(s) barra para cada coluna (com
as respectivas condições de apoio). A necessidade de um numero mais elevado de graus de
liberdade para permitir a comparação com o elementos HMT foi resolvida discretizando
proporcionalmente os elementos barra até que estes atingissem um valor de graus de
liberdade igual ou superior aos utilizados nos elementos HMT.
O método é recíproco para todas as colunas testadas e as estruturas em pórtico.
D.1.2 – Placas
No caso das Placas utilizou-se um (ou mais) elemento(s) shell para cada placa (com as
respectivas condições de apoio). A necessidade de um numero mais elevado de graus de
liberdade para permitir a comparação com o elementos HMT foi resolvida discretizando

75
proporcionalmente os elementos shell até que estes atingissem um valor de graus de
liberdade igual ou superior aos utilizados nos elementos HMT.
O método é recíproco para todas as placas testadas.