-
7/23/2019 Linearizacao de Sistemas No Lineares
1/8
Notas de Aula: Linearizacao de
Sistemas Nao-Lineares
DAS5112 Sinais e Sistemas Lineares I
Hector Bessa Silveira
2014/1
1 Objetivos
Veremos como podemos simular um sistema nao-linear utilizando
pacotes
computacionais de simulacao. Analisaremos os resultados de
simulacao do
sistema de um tanque no Simulink/Matlab e verificaremos a nocao
de pontode equilbrio. Veremos, ainda, como linearizar um sistema
nao-linear em um
ponto de equilbrio. Por fim, com base na Funcao de Transferencia
do sistema
linearizado, compararemos a dinamica do mesmo com a dinamica do
sistema
nao-linear original por simulacao.
2 Sistema de um tanque
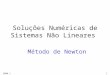
Considere o sistema de um tanque ilustrado na Figura 1. A
equacaodiferencial que descreve a dinamica da altura do nvel Hdo
tanque e
H(t) = 1
A(Qe(t)Qs(t)) = 1
A(Qe(t)
H(t)), (1)
1
-
7/23/2019 Linearizacao de Sistemas No Lineares
2/8
2 SISTEMA DE UM TANQUE
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1 1 1
Qe
Qs
A
H
Tanque
Figura 1: Tanque.
onde
H: altura do nvel,
Qe : vazao de entrada,
Qs =
H: vazao de sada,
0 : parametro do tanque,A: area da base do tanque.
Note que (1) e uma equacao diferencial nao-linear. O diagrama de
blocos
correspondente a equacao diferencial (1) e mostrado abaixo, onde
H(0) e a
condicao inicial.
Qe
Qs
+
1/AH H
H
H(0)
Figura 2: Diagrama de blocos da dinamica da altura do nvel Hdo
tanque.
A implementacao deste diagrama de blocos em um pacote
computacional
de simulacao fornece a solucao da equacao diferencial (1)
atraves de metodos
numericos de integracao. Consequentemente, podemos analisar o
comporta-
2
-
7/23/2019 Linearizacao de Sistemas No Lineares
3/8
3 PONTOS DE EQUILIBRIO
mento dinamico da altura do nvel H(t) em funcao do tempo t para
uma
determinada escolha da vazao de entrada Qe(t), t 0.
3 Pontos de equilbrio
Intuitivamente, pensamos que um sistema esta em equilbrio quando
o
mesmo apresenta um comportamento estatico, ou seja, o sistema
nao exibe
qualquer dinamica. Veremos agora como definir matematicamente
tal nocao.
Considere um sistema nao-linear descrito pela equacao
diferencial
q(t) =f(q(t), x(t)), (2)
onde q Rn e o estado e x Rm e o controle (ou entrada).
Dizemosque um par ordenado (q, x) Rn Rm e um ponto de equilbrio (ou
pontode operacao) do sistema (2) quando f(q, x) = 0, ou seja, q =
0. Isto e
equivalente a dizer que, se aplicarmos a entrada constatex(t) =x
no sistema
(2) com condicao inicialq(0) =q, obteremos a solucao constante
(ousolucao
estacionaria) q(t) = q, t 0. Note que, neste caso, o sistema
permaneceestatico, sem dinamica.
Determinaremos entao os pontos de equilbrio do sistema de um
tanque.
De (1) e do fato de que x = Qe e o controle (ou entrada) do
sistema, obtemos
H= 1
A(Qe Qs) = 0 x= Qe=Qs=
H H= x
2
2 . (3)
Como era de se esperar, o equilbrio ocorre quando no taque a
vazao de
entrada e igual a vazao sada (Qe=Qs). Assim, dado qualquer x,
temos que(H, x) R2 e um ponto de equilbrio do sistema (1), onde
H=x2/2.
Em situacoes praticas, nem sempre conheceremos completamente a
equa-
cao diferencial que descreve a dinamica de um sistema.
Entretanto, podemos
mesmo assim determinar alguns de seus pontos de equilbrio com
base na
propriedade abaixo.
3
-
7/23/2019 Linearizacao de Sistemas No Lineares
4/8
4 LINEARIZAC AO DE SISTEMAS N AO-LINEARES
Propriedade 1. Se a trajetoria q(t) (solucao) do sistema para
uma dada
condicao inicialq(0) satisfaz limt
q(t) =qao aplicarmos a entrada constante
x(t) =x, t 0, entao (q, x) e um ponto de equilbrio do
sistema.
4 Linearizacao de sistemas nao-lineares
Considere um sistema nao-linear descrito pelas equacoes
diferenciais
q1(t) =f1(q(t), x(t)),
...
qn(t) =fn(q(t), x(t)),
(4)
onde q = (q1, . . . , q n) Rn e o estado e x R e o controle.
Suponha quef1, . . . , f nsao continuamente diferenciaveis e que
(q, x) RnR e um pontode equilbrio do sistema, isto e,
qi=fi(q, x) = 0, parai = 1, . . . , n .
Seja g: R R uma funcao diferenciavel emt0 R. Do mesmo modo que
areta tangente no ponto (t0, g
(t0)) aproxima o grafico de g na proximidades
de t0 (i.e. para t= t t0=0), podemos encontrar um sistema linear
cujadinamica aproxima a dinamica do sistema nao-linear (4) nas
proximidades
de (q, x). Veremos como aplicar tecnicas lineares ao referido
sistema linear
que possibilitam analisar o sistema nao-linear (4) em torno de
(q, x).
Suponha que (4) esta no equilbrio (q, x) em t = 0, isto e, q(0)
= q e
x(t) = x para t
0. Agora, considere que q(t) e a solucao de (4) com
condicao inicialq(0) =qe uma outraentradax(t) =x. Sejaq(t) =q(t)
qo desvio em relacao aq, e x(t) =x(t) xo desvio em relacao a
entrada deequilbrio x. Assim, q(t) =q+q(t) e x(t) =x+x(t). Note que
q(0) = 0.
Nosso objetivo e relacionar de modo linear a dinamica deq(t)
comx(t), ao
menos aproximadamente.
4
-
7/23/2019 Linearizacao de Sistemas No Lineares
5/8
-
7/23/2019 Linearizacao de Sistemas No Lineares
6/8
4 LINEARIZAC AO DE SISTEMAS N AO-LINEARES
Para um dado ponto de equilbrio (H, x), obtemos de (5) que o
sistema
linearizado associado e descrito por
H(t) = f
H
(H,x)
H(t) + f
x
(H,x)
x(t) = 2A
HH(t) +
1
Ax(t), H(0) = 0.
(7)
Note que os coeficientes dependem do ponto de equilbrio (H, x)
escolhido.
De agora em diante, assumiremos que os parametros do tanque sao
dados
por = 0.01, A = 1, e escolhemos como ponto de equilbrio (H, x)
=
(4, 0.02). Desse modo, conclumos a partir de (7) que o sistema
linearizadoassociado ao sistema de um tanque no ponto de equilbrio
(4, 0.02) e
H(t) = 0.0025H(t) +x(t), H(0) = 0. (8)
Supondo que y = H e a sada do sistema, determinaremos no que se
segue
a Funcao de Transferencia G(s) = Y(s)/X(s) do sistema
linearizado
(8), onde X(s) e Y(s) sao as Transformadas de Laplace da entrada
x
e da sada y = H do sistema linearizado, respectivamente.
Aplicando a
Transformada de Laplace em ambos os lados de (8), obtemos
que1
sH(s) = 0.0025 H(s) + X(s) G(s) =H(s)X(s)
= 1
s+ 0.0025 ,
(9)
onde H(s) e a Transformada de Laplace de H. Observe que G(s) e
uma
Funcao de Transferencia de primeira ordem.
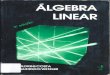
O diagrama de blocos da Figura 3 mostra como podemos comparar
a
dinamica do sistema linearizado em (H, x) = (4, 0.02) com a
dinamica do
sistema nao-linear (1). O bloco SNL e o sistema nao-linear com
condicao
inicial H(0) = 0, e G(s) e a Funcao de Transferencia em (9).
Para fazermos
tal comparacao, primeiramente escolhemos um controle que coloque
o sistema
nao-linear no ponto de equilbrio (H, x) = (4, 0.02). Assim,
aplicamos em
1Para condicoes iniciais nulas, relembre que L{ f(t)} =sF(s),
onde F(s) = L{f(t)}.
6
-
7/23/2019 Linearizacao de Sistemas No Lineares
7/8
4 LINEARIZAC AO DE SISTEMAS N AO-LINEARES
t= 0 um controle do tipo degrau de amplitude x= 0.02. Suponha
que
limt
H(t) =H= 4.
Tomamost1 >0 tal que
H(t) =H= 4, para t t1. (10)
Aplicamos entao x(t) no instante t = t1. Relembre quex(t) =
x+x(t) e
que x(t) e a entrada do sistema linearizado. Portanto,
x(t) =0 H(t) =H+ H(t), t t1 ,
onde H(t) e a solucao do sistema linearizado (7) com entrada
x(t), e H(t)
e a solucao do sistema nao-linear original (6) com entrada x(t)
=x+x(t).
0t1
x
0
0
x
x
x
H H+H
H=H+ Hx
H
H(0) = 0
G(s)
SNL++
++
Entrada para queH(t) H
Figura 3: Comparacao das dinamicas (x =0 e H(t) =H+H(t), t
t1).
7
-
7/23/2019 Linearizacao de Sistemas No Lineares
8/8
5 PROCEDIMENTOS
5 Procedimentos
1. Considere a equacao diferencial (1), com= 0.01, A = 1.
Implemente
o diagrama de blocos da Figura2no Simulink/Matlab com o objetivo
de
simular a dinamica da altura do nvel H do tanque. Simule o
sistema
para a condicao inicial H(0) = 0, e vazoes de entrada Qe =
0.01,
Qe = 0.02, Qe = 0.1 do tipo degrau. Analise os resultados.
Observe
a nao-linearidade do sistema: ao dobrarmos a vazao de entrada
de
Qe= 0.01 para Qe= 0.02, o valor final de H(t) quadruplicou.
2. Utilizando os mesmos dados do item anterior, simule o sistema
para a
condicao inicialH(0) = 4 e vazao de entradaQe= 0.02 do tipo
degrau.
O comportamento observado era esperado? Justifique (dica: veja
(3) e
relembre o conceito de ponto de equilbrio). Em seguida,
modifique a
vazao de entrada paraQe= 0.019 e simule. Analise os resultados
(veja
a Propriedade1e (3)).
3. Considere G(s) em (9), que e a Funcao de Transferencia do
sistema
linearizado associado ao sistema de um tanque (6) no ponto de
equil-brio (H, x) = (4, 0.02). Implemente no Simulink/Matlab o
diagrama de
blocos apresentado na Figura3com o objetivo de comparar a
dinamica
de H+ H(t) com a dinamica deH(t) do sistema nao-linear (6).
Para
isto, escolha x= 0.02, x = 0, e determine t1 >0 por simulacao
(veja
(10)). Simule parax= 0.0001,x= 0.001,x= 0.01 do tipo degrau
e
analise os resultados. Baseado no que vimos em aulas anteriores,
quais
sao as caractersticas dinamicas da sada y(t) = H(t) do sistema
li-
nearizado (por exemplo: sobressinal, tempo de acomodacao, valor
em
regime permanente)? Tais caractersticas eram esperadas?
Justifique
sua resposta (dica: veja (9)).
4. No item anterior, mude o ponto de equilbrio do sistema de um
tanque
para (H, x) = (16, 0.04), mas mantenha a mesma Funcao de
Transferen-
cia G(s) de antes. Simule e analise os resultados. Tal
comportamento
era esperado? Justifique sua resposta.
8