Embed Size (px)
DESCRIPTION
Movimento Circular
Citation preview

Aulas de movimento Circular. Prof. Dr. Irval C. De Faria 1
Movimento Circular
Grandezas Angulares
As grandezas até agora utilizadas de deslocamento/espaço (s, h, x, y), de velocidade (v)
e de aceleração (a), eram úteis quando o objetivo era descrever movimentos lineares,
mas na análise de movimentos circulares, devemos introduzir novas grandezas, que são
chamadas grandezas angulares, medidas sempre em radianos. São elas:
deslocamento/espaço angular: φ (phi)
velocidade angular: ω (ômega)
aceleração angular: α (alpha)
Da definição de radiano temos:
Desta definição é possível obter a relação:
E também é possível saber que o arco correspondente a 1rad é o ângulo formado quando seu
arco S tem o mesmo comprimento do raio R.
Espaço Angular (φ)
Chama-se espaço angular o espaço do arco
formado, quando um móvel encontra-se a uma
abertura de ângulo φ qualquer em relação ao
ponto denominado origem.
E é calculado por:

Aulas de movimento Circular. Prof. Dr. Irval C. De Faria 2
Deslocamento angular (Δφ)
Assim como para o deslocamento linear, temos um deslocamento angular se
calcularmos a diferença entre a posição angular final e a posição angular inicial:
Sendo:
No sentido anti-horário o deslocamento angular é positivo.
No sentido horário o deslocamento angular é negativo.
Velocidade Angular (ω)
Análogo à velocidade linear, podemos definir a velocidade angular média, como a razão
entre o deslocamento angular pelo intervalo de tempo do movimento:
Sua unidade no Sistema Internacional é: rad/s
Sendo também encontradas: rpm, rev/min, rev/s.
Também é possível definir a velocidade angular instantânea como o limite da
velocidade angular média quando o intervalo de tempo tender a zero:
Aceleração Angular (α)
Seguindo a mesma analogia utilizada para a velocidade angular, definimos aceleração
angular média como:
Algumas relações importantes
Através da definição de radiano dada anteriormente temos que:
mas se isolarmos S:
derivando esta igualdade em ambos os lados em função do tempo obteremos:

Aulas de movimento Circular. Prof. Dr. Irval C. De Faria 3
mas a derivada da Posição em função do tempo é igual a velocidade linear e a derivada
da Posição Angular em função do tempo é igual a velocidade angular, logo:
onde podemos novamente derivar a igualdade em função do tempo e obteremos:
mas a derivada da velocidade linear em função do tempo é igual a aceleração linear, que
no movimento circular é tangente à trajetória, e a derivada da velocidade angular em
função do tempo é igual a aceleração angular, então:
Então:
Linear
Angular
S = φR
v = ωR
a = αR
Período e Frequência
Período (T) é o intervalo de tempo mínimo para que um fenômeno ciclico se repita.
Sua unidade é a unidade de tempo (segundo, minuto, hora...)
Frequência(f) é o número de vezes que um fenômeno ocorre em certa unidade de tempo.
Sua unidade mais comum é Hertz (1Hz=1/s) sendo também encontradas kHz, MHz e
rpm. No movimento circular a frequência equivale ao número de rotações por segundo
sendo equivalente a velocidade angular.
Para converter rotações por segundo para rad/s:
sabendo que 1rotação = 2πrad,
Movimento Circular Uniforme
Um corpo está em Movimento Curvilíneo Uniforme, se sua trajetória for descrita por
um círculo com um "eixo de rotação" a uma distância R, e sua velocidade for constante,
ou seja, a mesma em todos os pontos do percurso.
No cotidiano, observamos muitos exemplos de MCU, como uma roda gigante, um
carrossel ou as pás de um ventilador girando.

Aulas de movimento Circular. Prof. Dr. Irval C. De Faria 4
Embora a velocidade linear seja constante, ela sofre mudança de direção e sentido, logo
existe uma aceleração, mas como esta aceleração não influencia no módulo da
velocidade, chamamos de Aceleração Centrípeta.
Esta aceleração é relacionada com a velocidade angular da seguinte forma:
Sabendo que e que , pode-se converter a função horária do espaço linear
para o espaço angular:
então:
Movimento Circular Uniformemente Variado
Quando um corpo, que descreve trajetória circular, e sofre mudança na sua velocidade
angular, então este corpo tem aceleração angular (α).
As formas angulares das equações do Movimento Curvilíneo Uniformemente Variado
são obtidas quando divididas pelo raio R da trajetória a que se movimenta o corpo.
Assim:
MUV MCUV
Grandezas lineares Grandezas angulares
E, aceleração resultante é dada pela soma vetorial da aceleração tangencial e da
aceleração centípeta:

Aulas de movimento Circular. Prof. Dr. Irval C. De Faria 5
Exemplo:
Um volante circular como raio 0,4 metros gira, partindo do repouso, com aceleração angular igual a
2rad/s².
(a) Qual será a sua velocidade angular depois de 10 segundos?
(b) Qual será o ângulo descrito neste tempo?
(c) Qual será o vetor aceleração resultante?
(a) Pela função horária da velocidade angular:
(b) Pela função horária do deslocamento angular:
(c) Pelas relações estabelecidas de aceleração tangencial e centrípeta:

Aulas de movimento Circular. Prof. Dr. Irval C. De Faria 6
É de muita importância, na área de estudo do movimento circular, o assunto que
se refere a acoplamento de polias ou engrenagens.
Ocorrem estes acoplamentos quando colocamos em contato polias ou
engrenagens; conforme os exemplos abaixo.
Cinemática dos elementos de transmissão.
Nesta seção estudar-se-á a cinemática da transformação da rotação em rotação,
ou seja, a cinemática das transmissões por correias, correntes, rodas de fricção e
engrenagens. Inicialmente, vamos observar os seguintes esquemas teóricos:
Ao estudarmos os tipos de acoplamentos; constatamos que eles podem ser
tratados de deois modos diferentes:

Aulas de movimento Circular. Prof. Dr. Irval C. De Faria 7
- acoplamentos onde temos o “tangenciamento” dos corpos (polia e/ou
engrenagem). Polias ou engrenagens se tocando.
- acoplamentos onde temos polias e/ou engrenagens acopladas pelo mesmo eixo.
Acoplamentos onde temos o “tangenciamento” dos corpos (polia e/ou
engrenagem) ou acopladas atraves de correias.
Ao analisarmos os pontos periféricos das polias ou da correia podemos afirmar
que todos têm a mesma velocidade tangencial; ou seja, a mesma velocidade linear, pois
nenhum ponto da correia ou dente da polia ultrapassa o outro quando esta está e
movimento. Melhor observado na correia.
Assim, para quaisquer tipos de transmissão de rotação por correias, correntes,
rodas de fricção e engrenagens, vale a relação :v1 v2 ;onde v1 e v2 são as
velocidades tangenciais dos elementos da transmissão 1 e 2, respectivamente.
Da cinemática da rotação sabemos que a velocidade tangencial é dada por vr=
,onde é a velocidade angular e r o raio da circunferência de contato. Desta forma, a
Temos:
.r1 .r2 ou
1 2

Aulas de movimento Circular. Prof. Dr. Irval C. De Faria 8
𝜔1
𝑟1=
𝜔2
𝑟2
A fórmula acima evidencia que a razão das velocidades angulares são
inversamente proporcionais a razão dos raios.
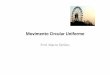
Questão 1
A figura mostra polias cujos raios correspondem a
ra = 30 cm e rb = 5 cm. Determine as rotações
realizadas pela polia B, sabendo que a frequência de
rotação em A é de 10 rpm.
Questão 2 Um estudante usa sua bicicleta para chegar à escola. Durante o percurso, o aluno
dá uma pedalada por segundo, numa bicicleta em que:
• O raio da catraca Rc = 6 cm
• O raio da roda dentada Rd = 12 cm
• O raio da roda da bicicleta é Rb = 20 cm
Determine a velocidade da bicicleta.
Questão 3 Três polias de raios iguais a 10 cm, 20 cm e 40 cm, estão
conectadas, sem escorregamento, por duas correias
mantidas tensas. Se a polia de raio maior gira com
frequência de 5 Hz, a polia de tamanho intermediário tem
frequência, em Hz, de:
a) 5 b) 10 c) 20 d) 25 e) 40
Questão 4
Uma criança, montada em um velocípede, se desloca em trajetória retilínea com
velocidade constante em relação ao chão. A roda dianteira descreve uma volta completa
em um segundo. O raio da roda dianteira vale 24 cm e o das traseiras 16 cm. Podemos
afirmar que as rodas traseiras do velocípede completam uma volta em
aproximadamente:
a) ½ s b) 2/3s c) 1s d) 3/2s e) 2s
Respostas
Resposta Questão 1 vA = vB
ωA .RA = ωB .RB
2π. fA .RA = 2π. fB. RB
fA .RA = fB .RB
10 . 30 = fB . 5
300 ÷ 5 = fB
fB = 60 rpm
Resposta Questão 2 vd = vc
ωd .Rd = ωc .Rc

Aulas de movimento Circular. Prof. Dr. Irval C. De Faria 9
2π/td . Rd = 2π/tc . Rc
12/1 = 6/tc
12. tc = 6
tc = 6 / 12
tc = ½
Logo:
ωc = 2π/ ½
ωc = 2π . 2
ωc = 4 π rad /s
Resposta Questão 3 f3. R3 = f2 .R2
5.40 = f2 . 20
f2 = 10 Hz
Alternativa b
Resposta Questão 4
fA. RA = fB .RB
1/ tA . RA = 1/tB .RB
1/1 .24 = 1/ tB .16
tB = 16/24 s
ou simplificando:
tB = 2/3s
Alternativa b
EXERCÍCICOS COMPLEMENTARES.
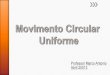
1-) Sabendo que a roda A gira com uma velocidade angular constante e
que não há escorregamento entre anel C e roda A roda B, qual das
seguintes afirmações sobre as velocidades angulares são verdadeiras?
a-) ωa = ωb ; b-) ωa ˃ ωb ; c-) ωa ˂ ωb ; d-) ωa = ωc
e-) o ponto de contato A e C têm a mesma aceleração
2-) O tambor de freio está ligado a um volante maior que não é
mostrado. O movimento do tambor de freio é definido pela relação
𝜑 = 36𝑡 − 1,6𝑡2, onde 𝜑 é expresso em radianos e t em segundos.
Determinar: (a) velocidade angular em t =2s, (b) o número de
revoluções, executado pelo tambor de freio, antes de parar.
Solução.
𝜑 = 36𝑡 − 1,6𝑡2 em radianos a-) fazendo a derivada para encontrar a velocidade angular
𝜔 =𝑑𝜑
𝑑𝑡= 36 − 3,2𝑡
para t = 2s
𝜔 =𝑑𝜑
𝑑𝑡= 36 − 3,2(2) ; 𝜔 = 29,6 𝑟𝑎𝑑/𝑠
b-) Quando o rotor parar 𝜔 = 0; asssim

Aulas de movimento Circular. Prof. Dr. Irval C. De Faria 10
𝜔 =𝑑𝜑
𝑑𝑡= 36 − 3,2𝑡
0 = 36 − 3,2𝑡 logo t= 11,25s
𝜑 = 36(11,25) − 1,6𝑡(11,25)2= 202,5 rad.
em revoluções dá; 𝜑 =202,5
2𝜋 ;ou seja
𝜑 = 32,2𝑟𝑒𝑣𝑜𝑙𝑢çõ𝑒𝑠
3-) Uma série de componentes de uma pequena
máquina está sendo movida por um passe de correia
transportadora sobre uma polia intermediária raio de
120 mm. No instante mostrado, a velocidade do ponto
A é de 300 mm/s para a esquerda e sua aceleração é
180 mm/s2 para a direita. Determinar: (a) velocidade
angular e aceleração angular da polia maior, (b) a
aceleração total do componente máquina no B.
𝑣𝐵 = 𝑣𝐴 =300𝑚𝑚
𝑠 ( 𝑎𝐵)𝑡 = 𝑎𝐴 = 180𝑚𝑚/𝑠
(𝑎) 𝑣𝐵 = 𝜔𝑟𝐵. 𝜔 =𝑣𝐵
𝑟𝐵=
300
120= 2,5𝑟𝑎𝑑/𝑠 𝝎 = 𝟐, 𝟓𝒓𝒂𝒅/𝒔
( 𝑎𝐵)𝑡 = 𝛼𝑟𝐵. 𝛼 =( 𝑎𝐵)𝑡
𝑟𝐵=
180
120=
1,5𝑟𝑎𝑑
𝑠 𝜶 = 𝟏,
𝟓𝒓𝒂𝒅
𝒔
(𝑏) ( 𝑎𝐵)𝑛 = 𝑟𝐵𝜔2 = (120)(2,5)2 = 750𝑚𝑚/𝑠 2
𝑎𝐵 = √( 𝑎𝐵)𝑡2 + ( 𝑎𝐵)𝑛
2 = √(180)2 + (2,5)2 = 771𝑚𝑚/𝑠 2
𝑡𝑔𝛽 =750
180 ; 𝛽 = 76,5° 𝒂𝑩 =
𝟕𝟕𝟏𝒎𝒎
𝒔 𝟐 ; 𝜷 = 𝟕𝟔, 𝟓°
4-) As duas polias mostradas podem ser operadas com uma correia
em V em qualquer uma das três posições. Se a aceleração angular
do eixo A é 6 rad/s2 e se o sistema estiver inicialmente em repouso,
determine o tempo necessário para eixo B atingir uma velocidade
de 400 rpm com a correia em cada uma das três posições.
𝑉𝑒𝑙𝑜𝑐𝑖𝑑𝑎𝑑𝑒 𝑎𝑛𝑔𝑢𝑙𝑎𝑟: 𝑣 = 𝛼𝐴𝑡
𝑉𝑒𝑙𝑜𝑐𝑖𝑑𝑎𝑑𝑒 𝑑𝑎 𝑐𝑜𝑟𝑟𝑒𝑖𝑎: 𝑣 = 𝑟𝐴𝜔𝐴 = 𝑟𝐵𝜔𝐵
𝑉𝑒𝑙𝑜𝑐𝑖𝑑𝑎𝑑𝑒 𝑑𝑒 𝐵: 𝜔𝐵 =𝑣
𝑟𝐵=
𝑟𝐴𝛼𝐴𝑡
𝑟𝐵
𝑟𝑒𝑠𝑜𝑙𝑣𝑒𝑛𝑑𝑜 𝑝𝑎𝑟𝑎 𝑡: 𝑡 = 𝑟𝐵𝜔𝐵
𝑟𝐴𝛼𝐴 ; 𝜔𝐵 = 400𝑟𝑝𝑚 41,889 𝑟𝑎𝑑/𝑠
𝑑𝑎𝑑𝑜 𝛼𝐴 = 6𝑟𝑎𝑑/𝑠 → 𝑡 = 𝑟𝐵
𝑟𝐴. 41,889
6 = 6,9813
𝑟𝐵
𝑟𝐴= 6,9813
𝑑𝐵
𝑑𝐴

Aulas de movimento Circular. Prof. Dr. Irval C. De Faria 11
𝑐𝑜𝑟𝑟𝑒𝑖𝑎 𝑑𝑎 𝑒𝑠𝑞𝑢𝑒𝑟𝑑𝑎 𝑑𝐵
𝑑𝐴=
2𝑖𝑛
4𝑖𝑛 𝑡 = 3,49𝑠
𝑐𝑜𝑟𝑟𝑒𝑖𝑎 𝑑𝑜 𝑚𝑒𝑖𝑜 𝑑𝐵
𝑑𝐴=
3𝑖𝑛
3𝑖𝑛 𝑡 = 6,98𝑠
𝑐𝑜𝑟𝑟𝑒𝑖𝑎 𝑑𝑎 𝑑𝑖𝑟𝑒𝑖𝑡𝑎 𝑑𝐵
𝑑𝐴=
4𝑖𝑛
2𝑖𝑛 𝑡 = 13,96𝑠
5-) Três cintos movem-se sobre duas polias sem
escorregar no sistema de redução de velocidade
mostrado. No instante mostrado a velocidade do
ponto A é 2 ft/s para a direita, diminuindo a taxa
de 6 ft/s2. Determine, a neste instante: a-)
velocidade e aceleração do ponto C na faixa de
saída,(b-) a aceleração do ponto B.
Polia esquerda
𝑟𝑎𝑖𝑜 𝑖𝑛𝑡𝑒𝑟𝑛𝑜: 𝑟1 = 2 𝑖𝑛 ; 𝑟𝑎𝑖𝑜 𝑒𝑥𝑡𝑒𝑟𝑛𝑜: 𝑟1 = 4 𝑖𝑛 ;
𝑣𝐴 =2𝑓𝑡
𝑠; (𝑎𝐴)𝑡 = −
6𝑓𝑡
𝑠2
(𝑎𝐴)𝑡 = −6𝑓𝑡
𝑠2= 6
𝑓𝑡
𝑠2
𝜔1 =𝑣𝐴
𝑟2=
2
412
= 6 𝑟𝑎𝑑/𝑠
𝛼1 =(𝑎𝐴)𝑡
𝑟2=
6
412
= 18 𝑟𝑎𝑑/𝑠
Polia intermediária
𝑟𝑎𝑖𝑜 𝑖𝑛𝑡𝑒𝑟𝑛𝑜: 𝑟1 = 2 𝑖𝑛 ; 𝑟𝑎𝑖𝑜 𝑒𝑥𝑡𝑒𝑟𝑛𝑜: 𝑟1 = 4 𝑖𝑛 ;
𝑣1 = 𝑟1𝜔1 = (2
12) (6) = 1
𝑓𝑡
𝑠; (𝑎1)𝑡 = 𝑟1𝛼1 = (
2
12) (18) = 3
𝑓𝑡
𝑠2
Polia da direita
𝑟𝑎𝑖𝑜 𝑖𝑛𝑡𝑒𝑟𝑛𝑜: 𝑟3 = 2 𝑖𝑛 ; 𝑟𝑎𝑖𝑜 𝑒𝑥𝑡𝑒𝑟𝑛𝑜: 𝑟4 = 4 𝑖𝑛 ;
𝜔2 =𝑣1
𝑟4=
1
412
= 3 𝑟𝑎𝑑/𝑠
𝛼2 =(𝑎1)𝑡
𝑟4=
3
412
= 9 𝑟𝑎𝑑/𝑠

Aulas de movimento Circular. Prof. Dr. Irval C. De Faria 12
a-) velocidade e aceleração do ponto C.
𝑣𝑐 = 𝑟3𝜔2 = (2
12) (3) = 0,5
𝑓𝑡
𝑠; (𝑎𝑐)𝑡 = 𝑟3𝛼2 = (
2
12) (9) = 1,5
𝑓𝑡
𝑠2
a-) aceleração e aceleração do ponto B.
(𝑎𝐵)𝑛 = 𝑟4𝜔42 = (
4
12) (3)2 = 3
𝑓𝑡
𝑠2
(𝑎𝐵)𝑡 = 𝑟4𝛼2 = (4
12) (9) = 3
𝑓𝑡
𝑠2
𝑎𝐵 = 4,24𝑓𝑡
𝑠2
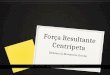
6-) Um sistema de redução de engrenagem consiste de
três engrenagens A, B e C. sabendo que a engrenagem A
gira no sentido horário com uma velocidade angular
constante ωa = 600 rpm, determinar (a) as velocidades
angulares de engrenagens B e C, (b) as acelerações dos
pontos em engrenagens B e C que estão em contato.
(𝑎) 𝜔𝐴 = 600𝑟𝑝𝑚 =(600)(2𝜋)
60= 20𝜋 𝑟𝑎𝑑/𝑠
Considere D sendo o ponto de contato entre a engrenagem A e B
𝑣𝐷 = 𝑟𝐷/𝐴𝜔𝐴 = (2)(20𝜋) = 40𝜋 𝑖𝑛/𝑠 ↓
𝜔𝐵 =𝑣𝐷
𝑟𝐷/𝐴=
40𝜋
4= 10𝜋
60
2𝜋= 300 𝑟𝑝𝑚
Considere E sendo o ponto de contato entre a engrenagem B e C
𝑣𝐸 = 𝑟𝐸/𝐵𝜔𝐵 = (2)(10𝜋) = 20𝜋 𝑖𝑛/𝑠 ↑
𝜔𝐶 =𝑣𝐸
𝑟𝐸/𝐶=
20𝜋
6= 3,333𝜋
60
2𝜋= 100 𝑟𝑝𝑚
b-) Considere D sendo o ponto de contato entre engrenagem A e B.
na polia B 𝑎𝐵 =(𝑣𝐸)2
𝑟𝐸/𝐵=
(20𝜋)2
2= 1973,9
𝑖𝑛
𝑠2 ←
na polia B 𝑎𝐶 =(𝑣𝐸)2
𝑟𝐸/𝐶=
(20𝜋)2
6= 658
𝑖𝑛
𝑠2 →
7-) Um cinto é puxado para a direita entre os cilindros A e B.
sabendo que a velocidade da correia é um constante 5 ft/s e
nenhum resvalamento ocorre, determinar as velocidades angulares
de A e B, (b) as acelerações dos pontos que estão em contacto com
o cinto
45°

Aulas de movimento Circular. Prof. Dr. Irval C. De Faria 13
8-) O anel C tem um raio interno de 55mm e um raio externo de 60
mm e é posicionada entre duas rodas A e B, cada um dos 24-mm de
raio exterior. Sabendo que A roda gira com uma velocidade angular
constante de 300 rpm e que não escorregar ocorre, determinar a
velocidade angular do anel C e da roda B, (b) a aceleração da pontos
de A e B que estão em contato com
C.
Velocidade angular
Disco A
Disco B
Aceleração do ponto de contato
Disco A
Disco B
velocidade Ponto 1, ponto de contato entre A e C
Ponto 2, ponto de contato entre B e C

Aulas de movimento Circular. Prof. Dr. Irval C. De Faria 14
9-) Anel B tem um raio interior r2 e trava em
relação à horizontal eixo A conforme
mostrado. O eixo A gira com uma velocidade
angular constante de 25 rad/s e não
escorrega. Sabendo que r1 =12 mm, mm r2
=30 e r3 =40 mm, determine: (a) velocidade
angular do anel B, (b) as acelerações dos
pontos do eixo A e anel B que estejam em
contacto, (c) a magnitude da aceleração de
um ponto da superfície exterior do anel B.
Aceleração
Ponto de A
Ponto de B
Ponto C, ponto de contato entre a haste e o anel
Na haste, ponto A
No anel, ponto B

Aulas de movimento Circular. Prof. Dr. Irval C. De Faria 15
10-) Um filme plástico move-se sobre dois
tambores. Durante um intervalo de 4s, que a
velocidade da fita é aumentada uniformemente de v0
=2 ft/s de v1 =4 ft/s. Sabendo que a fita não
escorregar na bateria, determine: (a) aceleração
angular do cilindro B, (b) o número de revoluções
executado pelo tambor B durante o intervalo de 4s.
Aceleração do ponto D, ponto de fora do anel
dados

Aulas de movimento Circular. Prof. Dr. Irval C. De Faria 16
11-) Uma polia e duas cargas estão ligadas por cabos extensível
conforme mostrado. A de carga tem uma aceleração constante
de 300 mm/s2 e uma velocidade inicial de 240 mm/s, ambos
dirigidos para cima. Determinae (a) o número de revoluções,
executado pela polia em 3 s, (b) a velocidade e a posição da
carga B após 3 s, (c) a aceleração do ponto D na borda da polia
em t = 0.
Movimento da correia
Como a correia não desliza, não escorrega, a aceleração da periferia é:
Aceleração angular do tambor B
Deslocamento angular do tambor B
em revoluções

Aulas de movimento Circular. Prof. Dr. Irval C. De Faria 17
Movimento da polia
para
Carga B
Ponto D