Embed Size (px)
Citation preview

Sistemas dinâmicos discretos: estabilidade,comportamento assintótico e sincronização
Wescley Bonomo


SERVIÇO DE PÓS-GRADUAÇÃO DO ICMC-USP
Data de Depósito: 18 de abril de 2008
Assinatura:
Sistemas dinâmicos discretos: estabilidade,comportamento assintótico e sincronização 1
Wescley Bonomo
Orientador: Prof. Dr. Hildebrando Munhoz Rodrigues
Dissertação apresentada ao Instituto de CiênciasMatemáticas e de Computação da Universidade deSão Paulo, como parte dos requisitos para obtenção dotítulo de Mestre em Ciências - Área: Matemática.
USP - São CarlosAbril/2008
1Este trabalho teve suporte financeiro da CAPES


“A Matemática é o mais maravilhoso instrumento criado
pelo gênio do homem para a descoberta da verdade.”
(Laisant)
“Felizes aqueles que se divertem com problemas
que educam a alma e elevam o espírito.”
(Fenelon)
“O valor de nossas expectativas sempre significa algo entre
o melhor que podemos esperar e o pior que podemos temer.”
(Jacob Bernoulli)
“Não existe oceano maior do que a determinação humana.”
(Lars Grael)
“Aqui, no entanto, nós não olhamos
para trás por muito tempo.
Nós continuamos seguindo em frente, abrindo novas
portas e fazendo coisas novas,
porque somos curiosos ... e a curiosidade continua
nos conduzindo por novos caminhos.”
(Walt Disney)
Ouvi, que não vereis com vãs façanhas,
Fantásticas, fingidas, mentirosas,
Louvar os vossos, como nas estranhas
Musas, de engrandecer-se desejosas:
As verdadeiras vossas são tamanhas,
Que excedem as sonhadas, fabulosas;
Que excedem Rodamonte, e o vão Rugeiro,
E Orlando, inda que fora verdadeiro,
(Luiz Vaz de Camões em Os Lusíadas)


Ofereço
Aos meus pais
Anna e Matheus
Ao meu irmão
Wanderson
A minha avó
Maria Bonomo Vinhati
A memória dos meus avós
Nilo Vinhati;
Amélia Anastácio Bonomo;
Matheus Bonomo.


Agradecimentos
Inicialmente, agradesço aos meus pais Matheus e Anna, por terem me dado a vida, e nos
quais me espelhei para criar meus valores e me tornar a pessoa que hoje sou, por me darem
grande apoio moral, me encorajando em todos os momentos da minha vida. Ao meu irmão
Wanderson e também aos meus primos Charles, Verusca e Charla, ora irmãos mais velhos e
sempre amigos, pelas brincadeiras que fizemos juntos e também pelo zelo que deram a minha
educação, minha eterna gratidão!
Ao professor Hildebrando pelo tema proposto e pela forma como orientou esse trabalho,
permitindo com que eu trabalhasse com liberdade.
Aos meus professores do DM-UFES; em especial ao Alancardek e a Liane pelo incentivo
dado para que eu cursasse o mestrado; aos meus orientadores do PET: Jamil Ferreira e José
A. da Rocha Pinto, e também aos meus professores de mestrado, com os quais obtive uma
formaçao mais sólida, a qual certamente vai além das salas de aula do ICMC-USP.
Ao professor Daniel Vendruscolo, por ter me ajudado a superar obstáculos encontrados pelo
caminho, durante o mestrado.
A minha turma de mestrado: Eduardo, Giuliano, J. Claudinei, Juliano, Lucas, Marcos,
Thais, Thiago Castilho, Thiago Catalan e Yuri; ao pessoal da minha sala, com os quais tive
a oportunidade de dividir a maior parte dos meus dias de trabalho; aos amigos do ICMC pelo
companheirismo e pela amizade, em especial a Daniela. Aos meus eternos amigos, àqueles que
me acompanharam e me ajudaram de perto e aqueles que torceram por mim de longe.
Ao pessoal do apartamento 406 do condomínio onde morei parte do tempo que fiz esse
mestrado: Ronaldinho e Flank, e aos demais amigos do prédio; Zenilde, Raulina, Neli, Nélia,
Pedro, Jane, Leu, e o zelador Marcos.
A CAPES pelo suporte financeiro concedido durante o mestrado, e pela bolsa concedida nos
estudos do PET, durante a graduação.
Enfim, a todos aqueles que de alguma forma contribuíram para a realização desse trabalho.
Obrigado!


Resumo
Este trabalho é em parte baseado no livro The Stability and Control of Discrete Processesde Joseph P. LaSalle. Nós estudamos equações como x(n+1) = T (x(n)), onde T : Rm → Rm é
uma aplicação contínua, com o sistema dinâmico associado Π(n,x) := T n(x).
Nós fornecemos condições suficientes para a estabilidade de equilíbrios usando o método
direto de Liapunov. Também consideramos sistemas discretos da forma x(n+1) = T (n,x(n),λ)
dependendo de uma parâmetro λ e apresentamos resultados obtendo estimativas de atratores.
Finalmente, nós apresentamos algumas simulações de sistemas acoplados como uma
aplicação em sistemas de comunicação.


Abstract
This work is in part based on the book The Stability and Control of Discrete Processesof Joseph P. LaSalle. We studing equations as x(n + 1) = T (x(n)), where T : Rm → Rm is
continuous transformation, with the associated dynamic system Π(n,x) := T n(x).
We provide suddicient conditions for stability of equilibria, using Liapunov direct method.
We also consider nonautonomous discrete systems of the form x(n + 1) = T (n,x(n),λ)
depending on the parameter λ and present results obtaining uniform estimatives of attractors.
We finally we present some simulations on synchronization of coupled systems as an
application on communication systems.


Sumário
Introdução 1
1 Preliminares 51.1 Equações de diferenças . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2 Sistemas dinâmicos discretos . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.3 Invariância . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.4 Conjuntos limite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2 Estabilidade e instabilidade 192.1 Método direto de Liapunov . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.2 Versão estendida do princípio de invariância . . . . . . . . . . . . . . . . . . . 24
2.3 Simulações e exemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3 Sistemas lineares 433.1 Sistemas lineares de equações de diferenças homogêneas de primeira ordem . . 43
3.2 Forma canônica de Jordan . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.3 Critério de Schur-Cohn . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3.4 Um funcional de Liapunov para X′= AX . . . . . . . . . . . . . . . . . . . . 49
3.5 Estabilidade por aproximação linear . . . . . . . . . . . . . . . . . . . . . . . 52
3.6 Equações de diferenças lineares de ordem m . . . . . . . . . . . . . . . . . . . 53
3.7 Soluções de uma equação de m-ésima ordem . . . . . . . . . . . . . . . . . . 54
3.8 Fórmula da variação das constantes . . . . . . . . . . . . . . . . . . . . . . . . 55
3.9 Matrizes companheiras . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4 Aplicações a sincronização 574.1 Aplicações ao sistema de Lorenz discreto . . . . . . . . . . . . . . . . . . . . 57
Bibliografia 63


Introdução
Este trabalho está em parte baseado no livro The Stability and Control of DiscreteProcesses de Joseph P LaSalle, (veja [18]) e no preprint Uniform Dissipativeness andRobust Synchronization of Parametrized Discrete Systems: location of the Atractor (VejaRODRIGUES, WU e GABRIEL, [31]).
Uma igualdade da forma F(n,x(n),x(n+1),x(n+2), ...,x(n+m)) = 0, onde a variável x éuma seqüência com valores em Rm, chama-se equação de diferenças finitas. Resolver uma talequação é encontrar uma seqüência x : N→ Rm que a satisfaz para todo n ∈ N.
Em muitas aplicações matemáticas como economia, o tempo é discreto, isto é, as grandezassão medidas em instantes isolados (de hora em hora, a cada segundo, etc.), formando umaseqüência que descreve o sistema. Neste caso as equações diferenciais não são adequadas paraexprimir o a evolução do fenômeno, sendo substituídas pelas equações de diferenças finitas.
Mesmo equações diferenciais dxdt = f (x) podem ser convertidas em equações de diferenças
através do método de Euler: x(n+1) = x(n)+h f (x(n)), que é um método iterativo de primeiraordem utilizado por exemplo na integração numérica e pelos microcomputadores.
Equações de diferenças finitas x(n + 1) = T (x(n)) têm uma estrutura natural de sistemasemidinâmico discreto (em Rm) e a formulação matemática deste é baseada na lei de evoluçãoΠ : N×Rm → Rm dada por Π(n,x) := T n(x), onde o operador T : Rm → Rm por todo estetrabalho será uma aplicação contínua. Eventualmente, estudaremos também sistemas do tipoΠ : N×Λ×Rm → Rm, Π(n,λ,x) = T n
λ(x), o qual pode ser interpretado como uma família
de sistemas semidinâmicos discretos. No capítulo 02 apresentaremos o Princípio da dissipaçãouniforme, provado por GABRIEL (veja [8], página 37 ou [31]). Esse resultado é assim chamadopois ele fornece uma estimativa uniforme (com relação ao parâmetro λ ∈ Λ) do atrator de Π :N×Λ×Rm → Rm, como veremos.
A teoria dos sistemas dinâmicos interessa-se em descrever como as órbitas de Π, quesão seqüências x : N×Rm → Rm se comportam e o que acontece com as mesmas quando n
vai para infinito. Este trabalho procurou estudar alguns aspectos qualitativos da teoria dossistemas semidinâmicos discretos, com ênfase para a estabilidade, comportamento assintótico

2 Introdução
e controlabilidade dos mesmos.
No capítulo 01 estudamos os sistemas do tipo x(n+1) = T (x(n)) junto com a sua dinâmicaassociada Π(n,x) := T n(x), e algumas noções básicas da teoria dos sistemas dinâmicos, como osconceitos de invariância, órbitas, atratores, pontos fixos (ou estados de equilíbrio) e periódicose conjuntos limites.
O Capítulo 02 preocupa-se em estudar a estabilidade dos estados de equilíbrio de x(n+1) =T (x(n)). Uma das técnicas fundamentais utilizadas é o método direto de Liapunov, devido aAleksandr Mikhalovich Liapunov (06/06/1857 - 03/11/1918).
Esta técnica fornece uma condição suficiente para a estabilidade de um ponto de equilíbrio.Para isso necessitamos da existência de uma função do tipo Liapunov V : Rm → R; definimosa derivada discreta de V (ao longo das soluções) como V (x) := V (T (x))−V (x). Os teoremasde estabilidade de Liapunov procuram obter informações qualitativas sobre o comportamentoassintótico das soluções do sistema acima, a partir de propriedades das funções V e V , nãosendo necessário o cálculo analítico das soluções.
Joseph. P. LaSalle estabeleceu uma relação entre funções de Liapunov e conjuntos ω-limitesde Birkhoff, desenvolvendo o principio da invariância de LaSalle.
Na prática trabalhamos com funcões de Liapunov generalizadas, a qual pode assumir valoresnegativos num conjunto limitado, e com isso podemos trabalhar com uma classe maior deproblemas. Estudaremos sistemas do tipo Π : N×Λ×Rm → Rm, Π(n,λ,x) = T n
λ(x). No
capítulo 02 apresentaremos o Princípio da dissipação uniforme, assim chamado pois forneceuma estimativa uniforme do atrator do sistema.
Resultados obtidos na dissertação de mestrado de Luiz Roberto Almeida Gabriel Filho,"Comportamento assintótico de sistemas não lineares discretos", orientada pelo professorHildebrando Munhoz Rodrigues, (veja [8]) na qual procurou-se estudar a estabilidade e odesenvolvimento de técnicas para obter estimativas uniformes de atratores, foram utilizadosaqui.
Como aplicação, foram feitos alguns exemplos e simulações
No capítulo 03 estudamos inicialmente a estabilidade de sistemas lineares de equações dediferenças X
′= AX , onde A é uma matriz (real ou complexa), e a partir disso procuramos obter
informação sobre o sistema não linear X′= AX + f (n).
Uma matriz de ordem m é dita estável se o seu raio espectral r(A) é estritamente menor doque 1. Procuramos estudar algoritmos e critérios computacionais para decidir se uma matrizé estável ou não, como por exemplo, o critério de Schur-Cohn. Estudaremos um teorema deLiapunov que dá condições necessárias e suficientes para que uma determinada matriz seja

Introdução 3
estável, assim como o critério de Sylvester para matrizes definidas positivas.
Em seguida vimos as equações de diferenças lineares de m-ésima ordem e sua equivalênciacom os sistemas de equações de diferenças finitas lineares através de suas matrizescompanheiras.
A fórmula da variação das constantes será uma ferramenta de muita utilidade para o estudodo comportamento assintótico de soluções de equações não lineares da forma x
′= Ax+ f (x).
Na teoria de sistemas dinâmicos, o conceito de controlabilidade surgiu naturalmentedurante o desenvolvimento inicial de controle ótimo, no final dos anos 1950, e foi descobertoindependentemente por matemáticos e engenheiros nos Estados Unidos e na URSS.
No capítulo 4 apresentamos algumas simulações utilizando Matlab, as quais mostram comoa sincronização pode ser utilizada em sistemas de comunicação. O sistema de Lorenz foiutilizado. Esta parte está relacionada com o trabalho que foi desenvolvido por GAMEIRO -RODRIGUES (veja [30]) para sistemas com variável contínua.


CAPÍTULO
1Preliminares
N este trabalho, assumiremos sempre que T : Rm → Rm é uma aplicação contínua.
Dada uma seqüência x : N → Rm, definimos x′
pela regra x′(n) = x(n + 1); e a primeira
diferença de x é dada por x(n) := x(n+1)− x(n) ou x = x′− x.
Correspondendo ao teorema fundamental do cálculo, temosn∑
k= jx(k) = x(n+1)− x( j).
Se y(n+1) =n∑
k= jx(k), então y(n) = x(n).
1.1 Equações de diferençasA equação de diferenças homogênea de primeira ordem é dada por
x(n+1) = T (x(n)), (1.1)
para todo n ∈ N, ou abreviadamente, x′ = T (x). Uma solução dessa equação é uma função(seqüência) x : N→ Rm que a satisfaz para todo n natural.
Teorema 1.1.1 (Teorema de existência e unicidade de soluções).O problema de valor inicial
x′= T (x)
x(0) = x0(1.2)
admite uma única solução para cada x0 ∈ Rm. De fato, tomando T 0 = Id e T n+1 =T T n, obtemos um algoritmo definindo a função x, que pode ser expressa pela seqüência
(x0,T (x0),T 2(x0),T 3(x0),T 4(x0), ...).

6 Capítulo 1: Preliminares
1.2 Sistemas dinâmicos discretosDefinição 1.2.1. Um sistema semidinâmico discreto em Rm é uma função Π : N×Rm → Rm
satisfazendo:
1. Π é contínua.
2. Π(0,x) = x, para todo x ∈ Rm.
3. (Propriedade de semigrupo)
Π(m,Π(n,x)) = Π(m+n,x), para todo m,n ∈ N e para todo x ∈ Rm.
Se trocarmos N por Z (no caso em que T é inversível) na definição 1.2.1, dizemos que Π éum sistema dinâmico discreto.
Toda equação de diferenças define o sistema semidinâmico Π(n,x) := T n(x);x ∈Rm,n ∈N.Se T for inversível, então podemos associar essa equação de diferenças ao sistema dinâmicoΠ(n,x) := T n(x), onde T n(x) := (T−n)−1 se n < 0.
Reciprocamente, todo sistema semidinâmico está associado a equação de diferenças x′=
T (x) := Π(1,x), e por indução finita, se T r(x) = Π(r,x) para algum r ≥ 1 temos que T r+1(x) =T (T r(x)) = T (Π(r,x)) = Π(1,Π(r,x)) = Π(r+1,x), portanto T n(x) = Π(n,x) para todo n ∈N.
1.3 InvariânciaDefinição 1.3.1. Seja H um subconjunto de Rm e seja T : Rm → Rm.
1. H é dito positivamente invariante (com respeito ao operador T ) se T (H) ⊆ H, isto é, se
x ∈ H então T (x) ∈ H.
2. H é dito negativamente invariante se T (H)⊇ H, isto é, para todo y ∈ H, existe x ∈ H tal
que T (x) = y.
3. Um subconjunto H de Rm que é positivamente invariante e negativamente invariante é
dito invariante. Noutras palavras, H é invariante se T (H) = H.
Propriedades:
A reunião de uma família qualquer de conjuntos positivamente invariantes é um conjuntopositivamente invariante. Idem para conjuntos invariantes e conjuntos negativamenteinvariantes.

Seção 1.3: Invariância 7
A intersecção de uma família qualquer de conjuntos positivamente invariantes é um conjuntopositivamente invariante. Em geral a intersecção de dois conjuntos invariantes (ounegativamente invariantes) nem sempre resulta num conjunto invariante (negativamenteinvariante); no entanto, se T for injetora, então a intersecção de dois conjuntosnegativamente invariantes é um conjunto negativamente invariante.
∅ e Rm são positivamente invariantes.
Proposição 1.3.1. Se H ⊆ Rm é T -invariante, onde T : Rm → Rm é contínua, então:
a) Se M ⊂ H é positivamente invariante, então H−M é negativamente invariante. Se T|H for
inversível, então vale a recíproca.
b) Se T|H é inversível e M ⊂ H é invariante, então H−M também é invariante.
Figura 1.1:
Prova:
Como M é positivamente invariante temos que T (M) ⊂ M. Assim, T (H −M) ⊃ T (H)−T (M) = H−T (M)⊃ H−M, logo H−M é negativamente invariante.
Se T for inversível e H−M é negativamente invariante, H−M ⊂ T (H−M) = H−T (M),logo M ⊃ T (M).
b)
Se M é invariante, Por a) temos que H −M é negativamente invariante. Portanto, restaapenas mostrar que H−M é positivamente invariante.
Seja x ∈H−M e suponha que T (x) ∈M, como M é invariante, existe y ∈M tal que T (y) =T (x), mas como T|H é inversível, temos que y = x, o que é uma contradição, logo T (x) ∈H−M
e portanto H−M é positivamente invariante.

8 Capítulo 1: Preliminares
Observação 1.3.1 (Prolongamento ou extensão de soluções).
Se (x0,T (x0),T 2(x0),T 3(x0), ...) é solução de (1.1) e x−1 ∈ T−1(x0) (imagem inversa de x0),
então a solução pode ser prolongada a (x−1,x0,T (x0),T 2(x0),T 3(x0), ...).
Um prolongamento é dito maximal se estiver definido para todo Z, ou então se
(x−n, · · · ,x−2,x−1,x0,T (x0),T 2(x0),T 3(x0), ...) for um prolongamento e T−1(x−n) = ∅.
Se T for injetiva então o prolongamento em H é sempre único, e se T for sobrejetiva, então
toda solução admite um prolongamento para todo z ∈ Z.
Definição 1.3.2. O conjunto γ+(x0) := T n(x0) : x0 ∈Rm, n ∈ N, isto é, a imagem da solução
de (1.1) chama-se órbita positiva (ou trajetória positiva) de x0 e é positivamente invariante. Se
T for inversível, definimos a órbita negativa de x0 como sendo o conjunto γ−(x0) := T−n(x0) :n ∈ N que é negativamente invariante, e neste caso, γ+(x0)∪γ−(x0) é a órbita completa (ou
simplesmente órbita) de x0 e é invariante.
Proposição 1.3.2. Um conjunto H ⊂Rm é negativamente invariante se e somente se toda órbita
iniciando em H tem um prolongamento em H para todo n ∈ Z.
Prova:
Seja x0 ∈ H. Como T (H) ⊃ H temos que existe x−1 ∈ H tal que T (x−1) = x0;e por indução, dado x−n ∈ H, existe x−n−1 ∈ H tal que T (x−n−1) = x−n. Portanto(· · · ,x−n, · · · ,x−1,x0,T (x0),T 2(x0), · · ·) é um prolongamento de (T n(x0)) para todo n ∈ Z.
Reciprocamente, se toda órbita que inicia em H tem um prolongamento em H, então paratodo y ∈ H, existe x ∈ H tal que T (x) = y, logo H é negativamente invariante.
Proposição 1.3.3. O fecho de um conjunto positivamente invariante é positivamente invariante.
Prova:
Se H ⊂Rm é positivamente invariante, T (H)⊂H, portanto T (H)⊂H. Como T é contínua,T (H)⊂ T (H), logo T (H)⊂ H.
Não é verdade em geral que o fecho de um conjunto negativamente invariante énegativamente invariante, por exemplo, se f (x) = [e−x + 1]sen2(πx
2 ) + [ x2 + 2]cos2(πx
2 ), temosque (1,+∞) é f -negativamente invariante mas [1,+∞) = (1,+∞) não é negativamenteinvariante, visto que f ([1,+∞)) = (1,+∞).
No entanto, temos o seguinte resultado:
Proposição 1.3.4. O fecho de um conjunto negativamente invariante limitado é negativamente
invariante.

Seção 1.3: Invariância 9
Figura 1.2:
Prova:
Dado x ∈ H, existe (xn) com xn → x e xn ∈ H para todo n ∈ N. Como H é T -negativamenteinvariante, temos que xn ∈ T (H), assim, existe uma seqüência (yn) tal que xn = T (yn).
Como H é limitado, H é compacto e assim existe uma subseqüência ynk convergente,digamos ynk → y ∈ H. Pela continuidade de T , x = lim
nk→∞xnk = lim
nk→∞T (ynk) = T ( lim
nk→∞ynk) =
T (y)⇒ x ∈ T (H).
Definição 1.3.3. Um conjunto H ∈ Rm que é fechado e invariante (com respeito a algum
operador T : Rm →Rm), é dito invariantemente conexo se não existem dois conjuntos fechados
não vazios, invariantes e disjuntos F1 e F2 tais que H = F1tF2.
No que segue, é interessante observarmos que se um conjunto não vazio H ∈Rm é (fechadoe) invariante, faz sentido definirmos o sistema semidinâmico Π : N×H →H, Π(n,x) = T n
|H(x).
Se existirem dois fechados invariantes, disjuntos e não vazios F1 e F2 tais que H = F1tF2,pela invariância de F1, se uma solução de (1.1) inicia em F1 então ela está totalmente contida emF1. Analogamente, se uma solução de (1.1) inicia em F2 então ela está totalmente contida em F2.Assim, num certo sentido temos dois sistemas semidinâmicos: Π1 : N×F1 → F1, Π1(n,x) =T n|F1
(x) e Π2 : N×F2 → F2, Π2(n,x) = T n|F2
(x), e a dinâmica de Π em F1 pode inclusive serdiferente da dinâmica de Π em F2.
Exemplo 1.3.1. Se H ⊂Rm é fechado, invariante e conexo, então H é invariantemente conexo.
De fato, Se H não fosse invariantemente conexo, existiriam dois fechados disjuntos e não
vazios F1 e F2 tais que H = F1 tF2. Como Rm é um espaço topológico normal, existem B1 e

10 Capítulo 1: Preliminares
Figura 1.3:
B2 subconjuntos abertos e disjuntos de Rm tais que F1 ⊂ B1 e F2 ⊂ B2. Mas então H ⊂ B1tB2
com B1 6= ∅ e B2 6= ∅. Absurdo, pois H é conexo.
A recíproca desse resultado é obviamente falsa. De fato, seja f : R → R dada pela regra
f (x) =−x+1 e seja H = [0, 13 ]∪ [2
3 ,1]. H é invariantemente conexo, apesar de não ser conexo.
Figura 1.4:
Definição 1.3.4. Uma solução de (1.1) é dita periódica (ou cíclica) se existe k ∈ N tal
que T k(x0) = x0, e o menor k com essa propriedade é dito período da solução periódica.
Analogamente definimos órbita periódica, cujos elementos são ditos pontos periódicos.
Indicamos o conjunto dos pontos T -periódicos por Per(T ) e o conjunto dos pontos periódicos
de período k por Per(T,k). Se k = 1, isto é, T (x0) = x0 então x0 é dito ser um ponto fixo (ou
ponto invariante, ou ainda ponto de equilíbrio) de T .
Proposição 1.3.5. Se H é um conjunto invariante com um número finito de elementos, então
T|H é inversível. Em particular, toda solução periódica de (1.1) admite um prolongamento para
todo n ∈ Z.
Prova:

Seção 1.3: Invariância 11
Pela invariância de H, temos que T (H) = H, logo T|H é sobrejetora. Como H tem umnúmero finito de elementos, temos que T|H também é injetora.
Se T n(x0), x0 ∈ Rm é uma solução periódica de período k de (1.1), temos queH = x0,T (x0),T 2(x0), · · · ,T k−1(x0) é um conjunto invariante com um númerofinito de elementos. Segue que TH é inversível, e a existência (e unicidade) doprolongamento da solução periódica (em H) para todo Z segue da observação1.3.1, ou então da Proposição 1.3.2. Explicitamente, um prolongamento é· · · ,x0,T (x0),T 2(x0), · · · ,T k−1(x0),x0,T (x0),T 2(x0), · · · ,T k−1(x0), · · ·.
Proposição 1.3.6. Um conjunto invariante com um número finito de elementos é
invariantemente conexo se e somente se for uma órbita periódica. Em particular, todo conjunto
invariante com um número finito de elementos é reunião disjunta de órbitas periódicas.
Prova:
Suponha que H não seja uma órbita periódica. Se #H = m, então dado x∈H existe n < m talque M = x,T (x),T 2(x) · · ·T n−1(x) é uma órbita periódica, e portanto um conjunto invariante.Pela Proposição 1.3.5 T|H é inversível, logo pela Proposição 1.3.1 H−M também é invariante.Mas então H e H −M são dois fechados invariantes disjuntos e não vazios tais que H = MtH−M. Absurdo pois H é invariantemente conexo.
Se H é uma órbita periódica de período k, digamos H = x,T (x),T 2(x), · · ·T k−1(x) e seM é um subconjunto invariante não vazio de H, então existe n0, 0≤ n0 < k tal que T n0(x) ∈M.Como M é invariante, T n0+n(x) ∈ M para todo n ∈ N. Visto que T k(x) = x, temos que H =T n0(x),T n0+1(x), · · · ,T n0+k−1(x) ⊂M. Logo M = H e H é invariantemente conexo.
Se H ⊂ Rm é um conjunto invariante com um número finito de elementos, tomandox1 ∈ H arbitrariamente, temos que existe n1 ≤ m := #H tal que o conjunto γ(x1) =x1,T (x1),T 2(x1), · · · ,T n1−1(x1) é uma órbita periódica.
Se n1 = m a afirmação segue, senão, existe x2 ∈ H − γ(x1) que é um conjunto finito,portanto existe n2 ≤ m tal que o conjunto γ(x2) = x2,T (x2),T 2(x2), · · · ,T n2−1(x2) é umaórbita periódica.
Se n1 +n2 = m a afirmação segue, senão, existe x3 ∈H− (γ(x1)t γ(x2)) que é um conjuntofinito, portanto existe n3 ≤ m tal que o conjunto γ(x3) = x3,T (x3),T 2(x3), · · · ,T n3−1(x3) éuma órbita periódica.
Prosseguindo assim, como H é finito, esse processo tem que acabar. Assim, obteremos queH = γ(x1)t γ(x2)t·· ·t γ(xk), onde os γ(xi) são órbitas periódicas duas a duas disjuntas.
O estudo dos pontos fixos tem grande importância para se determinar os pontos de equilíbriode sistemas dinâmicos discretos, além de constituir por si só um objeto de pesquisa intensa. A

12 Capítulo 1: Preliminares
procura de uma solução de uma equação do tipo f (x) = b reduz-se a procura de um ponto fixopara a aplicação ξ(x) = f (x)+ x−b. De fato, ξ(x) = x ⇔ f (x) = b.
Sob certas hipóteses sobre um operador T e um subconjunto H que é T -positivamneteinvariante, alguns resultados garantem a existência de um ponto fixo para T em H.
Teorema 1.3.1 (Ponto fixo de Banach).Seja F um subconjunto fechado e f -positivamente invariante de um espaço métrico
completo, onde f : F → F uma contração, isto é, existe λ ∈ R com 0 ≤ λ < 1 tal que
d( f (x), f (y))≤ λd(x,y). Então f tem um único ponto fixo, o qual é atrator.
Teorema 1.3.2 (Ponto fixo de Brower).Seja T : Rm → Rm uma aplicação contínua, H ⊂ Rm homeomorfo a B[0,1] = B(0,1) e
T-positivamente invariante. Então existe x ∈ H tal que T (x) = x.
Exemplo 1.3.2. Se f : R→R, f (x) =−x+1 e H = [0, 13 ]∪ [2
3 ,1] como no exemplo 1.3.1, então
H é um conjunto fechado e invariante, porém sem ponto fixo.
1.4 Conjuntos limiteSe (x,T (x),T 2(x), ...) é convergente, então a = lim
n→∞T n(x) é um ponto fixo de T . Mais
geralmente temos:
Definição 1.4.1 (Birkhoff).Dado x ∈Rm, seja (T n(x)) a solução de (1.1) que inicia em x. Define-se o conjunto ω(x) :=
q ∈ Rm : ∃ nk → ∞ e T nk(x0)→ q, k → ∞. ω(x) é dito conjunto ω-limite do ponto x .
Se y ∈ γ+(x), então ω(x) = ω(y), isto é, o conjunto ω-limite é uma propriedade daórbita de um ponto, e não desse ponto. De fato, se y ∈ γ+(x), temos que y = T k(x) e sez ∈ ω(x), temos que existe uma subseqüência T ni(x) → z, ni > k, assim z = lim
ni→∞T ni(x) =
limni→∞
T ni−k+k(x) = limni→∞
T ni−k(T k(x)) = limni→∞
T ni−k(y), portanto ω(x)⊂ ω(y) e a outra inclusão
se verifica analogamente. Assim, podemos definir o conjunto ω-limite de uma órbita.
Observação 1.4.1. Equivalentemente, temos que ω(x) :=∞T
j=0
∞Sn= j
T n(x). Em particular, ω(x) é
fechado.
Prova:
Seja y ∈ ω(x0). Dado j > 0 existe uma subseqüência T nk(x) de T n(x), nk > j, que converge
para y. Logo, y ∈∞S
n= jT n(x). Como j é arbitrário, y ∈
∞Tj=0
∞Sn= j
T n(x).

Seção 1.4: Conjuntos limite 13
Provemos agora a outra inclusão. Sejam A j =∞S
n= jT n(x) e y ∈
∞Tj=0
A j. Então y ∈ A0, logo
existe uma seqüência em A0 que converge para y. Seja y0 = T n0(x) um termo dessa seqüênciatal que |y− y0|< 1, para algum n0 ≥ 0.
Como y ∈ A(n0 +1), existe uma seqüência em An0+1 convergindo para y. Seja y1 = T n1(x)um termo dessa seqüência tal que |y− y1|< 1
2 para algum n1 > n0.
Como y ∈ A(n1 +1), existe uma seqüência em An1+1 convergindo para y. Seja y1 = T n1(x)um termo dessa seqüência tal que |y− y1|< 1
22 para algum n2 > n1 > n0.
Prosseguindo assim, criamos uma seqüência yk ∈ Rm tal que |y− yk| < 12k , T nk(x) e nk >
nk−1, portanto yk = T nk(x)→ x quando k → ∞, e assim, y ∈ ω(x0).Existem algumas razões para estarmos interessados em estudar o que acontece com T n(x)
para valores grandes de n. isso concerne com o comportamento assintótico de T n(x), assuntotratado pela teoria da estabilidade. No próximo capítulo veremos como obter informação sobreconjuntos limites de órbitas utilizando funções de Liapunov.
Teorema 1.4.1. Se existe W ⊂ Rm compacto tal que T n(x) ∈W para todo n ∈ N, então ω(x)tem as seguintes propriedades:
1. ω(x) é não vazio;
2. ω(x) é compacto;
3. ω(x) é invariante;
4. ω(x) é invariantemente conexo;
5. ω(x) é o menor conjunto fechado do qual T n(x) se aproxima quando n→ ∞.
Prova:
1. ω(x) é não vazio:
Como T n(x) ⊂W que é compacto, segue que T n(x) tem um ponto limite, logo ω(x) 6=∅.
2. ω(x) é compacto:
Como ω(x) ⊂W que é compacto, é suficiente verificar que ω(x) é fechado. Isso segue daobservação 1.4.1.
3. ω(x) é invariante:

14 Capítulo 1: Preliminares
Mostremos primeiro que T (ω(x))⊆ ω(x), isto é, ω(x) é positivamente invariante. Como T
é contínua, temos:
T (ω(x)) = T
(∞\
j=0
∞[
n= j
T n(x)
)⊂
∞\
j=0
T
(∞[
n= j
T n(x)
)⊂
∞\
j=0
T
(∞[
n= j
T n(x)
)=
∞\
j=0
(∞[
n= j
T n+1(x)
)=
∞\
j=0
(∞[
n= j+1
T n(x)
)⊂
∞\
j=0
(∞[
n= j
T n(x)
)= ω(x).
Observe que aqui não se usou o fato de (T n(x)) ser limitada.
Mostremos agora que T (ω(x))⊇ ω(x), isto é, ω(x) é negativamente invariante.
Dado y ∈ ω(x), seja T ni(x) tal que T ni(x)→ y.
Como T n(x) é limitada temos que T ni−1(x) é limitada e portanto existe T nik−1(x)convergente; digamos T nik−1(x)→ z ∈ ω(x). Pela continuidade de T :
y = limk→∞
T nik (x) = limk→∞
T (T nik−1(x)) = T ( limk→∞
T nik−1(x)) = T (z).
Logo T (ω(x))⊇ ω(x).
4. ω(x) é invariantemente conexo:
Suponha por contradição que ω(x) é igual a reunião de dois conjuntos fechados invariantesnão vazios e disjuntos ω1 e ω2.
Como ω(x) é compacto, segue que ω1 e ω2 também são compactos. Como Rm é um espaçotopológico normal, existem dois abertos disjuntos U1 e U2 tais que ω1 ⊂U1 e ω2 ⊂U2.
Como T é contínua, existe um conjunto aberto B1 tal que ω1 ⊂ B1 e T (B1) ⊂U1. De fato,tomando B1 := T−1(U1), temos que B1 é aberto, T (B1) = T (T−1(U1)) ⊂ U1 e, como ω1 éinvariante, ω1 ⊂ T−1(T (ω1)) = T−1(ω1)⊂ T−1(U1) = B1, pois ω1 ⊂ B1.
Como por hipótese ω(x) = ω1tω2 e visto que ω1 ⊂U1∩B1 e ω2 ⊂U2, então existe n0 ∈Ntal que T n(x) ∈ (U1∩B1)∪U2 para todo n > n0.
Como ω1 6= ∅ podemos supor que existe n0 tal que T n0(x) ∈U1∩B1. Suponha que existan1 > n0 tal que T n1(x) ∈U1∩B1 e T n1+1(x) ∈U2. Mas como T (B1) ⊂U1, temos T n1+1(x) =T (T n1(x)) ∈ T (U1∩B1)⊂U1, ou seja T n1+1(x) ∈U1, o que é uma contradição, pois U1∩U2 =∅, logo ω(x) é invariantemente conexo.
5. ω(x) é o menor conjunto fechado do qual T n(x) se aproxima quando n→ ∞:

Seção 1.4: Conjuntos limite 15
Seja F um subconjunto fechado de Rm do qual T n(x) se aproxima quando n → ∞ e sejay ∈ ω(x0). Então existe uma subseqüência T ni(x) → y. Se x,S ⊂ Rm definimos ρ(x,S) :=infy∈S
|x− y|. Assim, ρ(T ni(x),F) → ρ(y,F). Como ρ(T ni(x),F) → 0 pois T n(x0) → F quando
n→ ∞, temos que ρ(y,F) = 0, e portanto y ∈ F pois F é fechado e assim, ω(x)⊂ F .
Observe que se nada for dito sobre a inclusão de ω(x) em um subconjunto compacto deRm, ou o que é equivalente, sobre sua limitação, podemos afirmar apenas que ω(x) é fechado epositivamente invariante.
Observação 1.4.2. Se T n(x) é limitado, então ω(x) é invariantemente conexo. No entanto, não
é possível afirmar que ω(x) seja conexo. Por exemplo se Rα : R2 → R2 é a rotação de um
ângulo α (com relação a origem) e x ∈ S1 = x ∈ R2 : |x| = 1; se α for múltiplo racional de
π = 3.14159... isto é, α = pq π, onde p ∈ Z, q ∈ Z−0 (e podemos supor também que p > 0 e
mdcp,q= 1), então Rqα(x) = x, logo ω(x) é uma órbita periódica e portanto desconexo; mas
se α não for múltiplo racional de π então ω(x) = S1 que é conexa (veja Katok, [17]).
Definição 1.4.2. Se H ⊂Rm, definimos Ω(H) :=∞T
j=0
∞Sn= j
T n(H), em particular, Ω(H) é fechado.
Proposição 1.4.1. Se H ⊂ Rm então y ∈ Ω(H) se, e somente se, existirem seqüências n j em Ne (y j) em H tais que T n j(y j)→ y quando j → ∞.
Prova:
⇒ Suponha que existam seqüências n j em N e (y j) em H tais que T n j(y j) → y quandoj → ∞. Suponha sem perda de generalidade que n j é crescente, então dado i ∈ N, existe j0 ∈ N
tal que n j0 > i para qualquer j > j0. Assim, T n j(y j)→ y e T n j(y j)∈ T n j(H)⊂∞S
n=iT n(H), dessa
forma, y∈∞S
n=iT n(H) para todo i e assim, y∈
∞Ti=0
∞Sn=i
T n(H). Provemos agora a outra implicação.
⇐ Sejam y ∈ Ω(H), A j =∞S
n= jT n(H) e y ∈
∞Tj=0
A j, então y ∈ A0, logo existe uma seqüência
em A0 que converge para y. Seja w0 = T n0(y0) um termo dessa seqüência tal que |y−w0|< 1,para algum n0 ≥ 0 e para algum y0 ∈ H.
Como y∈ A(n0 +1), existe uma seqüência em An0+1 convergindo para y. Seja w1 = T n1(y1)um termo dessa seqüência tal que |y−w1|< 1
2 para algum n1 > n0 e para algum y1 ∈ H.
Como y∈ A(n1 +1), existe uma seqüência em An1+1 convergindo para y. Seja w2 = T n2(y2)um termo dessa seqüência tal que |y−w2|< 1
22 para algum n2 > n1 > n0 e para algum y2 ∈ H.
Prosseguindo assim, criamos uma seqüência yk ∈ H tal que |y− yk| < 12k , wk = T nk(yk) e
nk > nk−1, wk = T nk(yk), portanto wk → y quando k → ∞.

16 Capítulo 1: Preliminares
Teorema 1.4.2. Se H 6= ∅ e existe W ⊂ Rm compacto tal que T n(H) ⊂W para todo n ∈ N,
então Ω(H) tem as seguintes propriedades:
1. Ω(H) é não vazio;
2. Ω(H) é compacto;
3. Ω(H) é invariante;
4. Ω(H) é o menor conjunto fechado do qual T n(H) se aproxima quando n→ ∞.
Prova:
1. Ω(H) é não vazio:
Se x ∈H, temos que T n(x) ∈ T n(H)⊂W que é compacto. Então T n(x) tem algum pontolimite em W e assim, Ω(H) 6= ∅.
2. Ω(H) é compacto:
Ω(H) é fechado pela definição 1.4.2. Como Ω(H)⊂W que é compacto seque que Ω(H) écompacto.
3. Ω(H) é invariante:
Provemos inicialmente que T (Ω(H))⊆ Ω(H), isto é, Ω(H) é positivamente invariante. Defato:
T (Ω(H)) = T
(∞\
j=0
∞[
n= j
T n(H)
)⊂
∞\
j=0
T
(∞[
n= j
T n(H)
)⊂
∞\
j=0
T
(∞[
n= j
T n(H)
)=
∞\
j=0
(∞[
n= j
T n+1(H)
)=
∞\
j=0
(∞[
n= j+1
T n(H)
)⊂
∞\
j=0
(∞[
n= j
T n(H)
)= Ω(H).
Observe que aqui não se usou o fato de (T n(H)) ser limitada.
Provemos agora a inclusão T (Ω(H))⊇Ω(H), isto é, Ω(H) é negativamente invariante.
Dado y ∈Ω(H), existem seqüências y j ∈H e n j ∈N tais que T n j(y j)→ y e n j →∞ quandoj → ∞.
y = limj→∞
T n j(y j) = limj→∞
T (T n j−1(y j)) = T ( limj→∞
T n j−1(y j)) = T (z).

Seção 1.4: Conjuntos limite 17
4. Ω(H) é o menor conjunto fechado do qual T n(H) se aproxima quando n→ ∞:
Seja F um subconjunto fechado de Rm tal que T n(H)→ F quando n → ∞. Dado ε > 0, seAn := ρ(z,F) : z ∈ T n(H), então existe n0 tal que supAn < ε para todo n > n0.
Se y ∈Ω(H) existem seqüências y j ∈ H e n j ≥ n0 tais que T n j(y j)→ ∞ quando j → ∞.
Como T n j(y j) ∈ T n j(H), ρ(T n j(y j),F) ∈ An j , e como n j ≥ n0, temos:
ρ(T n j(y j),F) < ε⇒ ρ(y,F) = ρ( limn→∞
T n j(y j),F) = limn→∞
ρ(T n j(y j),F)≤ ε. Logo, ρ(y,F)≤ε para todo ε > 0, o que implica que y ∈ F = F . Portanto Ω(H)⊂ F .
Proposição 1.4.2. Se existe um conjunto compacto H ⊂ Rm e fn : H → R, fn(y) :=ρ(T n(y),
Sx∈H
ω(x)) e y ∈ H. Se fn → 0 uniformemente em H então Ω(H) =S
x∈Hω(x).
Prova:
Como ω(x)⊂Ω(H),S
x∈Hω(x)⊂Ω(H) e conseqüentemente
Sx∈H
ω(x)⊂Ω(H) = Ω(H) pois
Ω(H) é fechado. Observe que não precisamos aqui da hipótese fn → 0 uniformemente em H.
Mostremos agora a outra inclusão. Como fn → 0 uniformemente em H quando n → ∞,então dado ε > 0 existe n0 = n0(ε) ∈N tal que para todo n≥ n0 temos que fn(y) < ε, para todoy ∈ H, assim sup
y∈Hfn(y)≤ ε⇒ sup
y∈Hρ(T n(y),
Sx∈H
ω(x))≤ ε⇒ supz∈T n(H)
ρ(z,S
x∈Hω(x))≤ ε.
Logo ρ(T n(H),S
x∈Hω(x)) → 0 quando n → ∞ e portanto T n(H) se aproxima de
Sx∈H
ω(x)
quando n → ∞. Como Ω(H) é o menor fechado do qual T n(H) se aproxima quando n → ∞,temos que Ω(H)⊂
Sx∈H
ω(x).
Proposição 1.4.3. Se K ⊂Rm é compacto não vazio e positivamente invariante, então Ω(K) =∞T
n=0T n(K). Além disso, Ω(K) é não vazio, compacto e é o maior conjunto invariante contido
em K.
Prova:
Como K é positivamente invariante, temos que T n(K) ⊂ K para todo n, e como K tambémé compacto, pelo Teorema 1.4.2, Ω(K) é não vazio, compacto e invariante.
Temos que T n(K) ⊂ T j(K) se n ≥ j. Segue que∞S
n= jT n(K) ⊂ T j(K) = T j(K), pois T é
contínua. Assim Ω(K) =∞T
j=0
∞Sn= j
T n(K)⊂∞T
j=0T j(K) =
∞Tj=0
T j(K) pelo teorema dos compactos
encaixados, portanto Ω(K)⊂∞T
j=0T j(K).

18 Capítulo 1: Preliminares
Por outro lado, como T j(K)⊂∞S
n= jT n(K)⊂
∞Sn= j
T n(K) para todo j∈N, portanto∞T
j=0T j(K)⊂
∞Tj=0
∞Sn= j
T n(K) = Ω(K). Logo Ω(K) =∞T
j=0T j(K).
Se W ⊂ K é invariante, temos que W = T n(W ) ⊂ T n(K) para todo n ∈ N. Assim W ⊂∞T
n=0T n(K) = Ω(K). Logo Ω(K) é invariante maximal.

CAPÍTULO
2Estabilidade e instabilidade
Seja H ⊂ Rm T -invariante;
1. H é localmente atrativo (ou atrator local) se existe uma vizinhança W de H (W é umconjunto aberto que contém H) tal que H atrai os pontos de W . Isto é, para todo x ∈W
temos que limn→∞
d(T n(x),H) = 0.
2. H é estável se para qualquer vizinhança V de H existe uma vizinhança W de H tal queT n(W )⊂V para todo n ∈ N. Um conjunto que não é estável, é dito instável.
3. H é localmente assintoticamente estável se for estável e existir uma vizinhança W de H
tal que limn→∞
d(T n(x),H) = 0 para todo x ∈W . Se H for estável e limn→∞
d(T n(x),H) = 0para todo x ∈ Rm, então H é dito globalmente assintoticamente estável.
4. H é uniformemente assintoticamente estável se for estável e atrair uma vizinhança W deH.
2.1 Método direto de LiapunovProposição 2.1.1. Se H é estável, então H é estável e positivamente invariante. Em particular,
se um ponto é estável, então ele é um ponto de equilíbrio.
Prova:
Se H é estável, então dada uma vizinhança V de H, existe uma vizinhança W de H tal queT (W )⊂V e essas mesmas vizinhanças mostram a estabilidade de H.
Para mostrar que H é positivamente invariante, considere as vizinhanças Ui = B 1i(H), i ∈
N−0. Temos que H =∞T
i=1Ui.

20 Capítulo 2: Estabilidade e instabilidade
De fato, se x ∈∞T
i=1Ui, então ρ(x,H) < 1
i para todo i ∈ N− 0, logo ρ(x,H) = 0 e
conseqüentemente, x ∈ H, portanto∞T
i=1Ui ⊆ H.
Por outro lado, como H ⊂Ui para cada i ∈ N−0, temos que H ⊆∞T
i=1Ui, logo H =
∞Ti=1
Ui.
Como H é estável, para cada vizinhança Ui existe uma vizinhança Wi de H tal que T n(Wi)⊂Ui para todo n, i ∈ N−0.
Como Wi ⊂ Ui, temos∞T
i=1Wi ⊂
∞Ti=1
Ui = H, logo∞T
i=1Wi = H, e como H ⊂ Wi para cada
i ∈ N−0, temos que H ⊂∞T
i=1Wi, logo H =
∞Ti=1
Wi.
Finalmente, T (H) = T (∞T
i=1Wi)⊂
∞Ti=1
T (Wi)⊂∞T
i=1Ui = H, logo T (H)⊂ H.
Se H = x0, onde x0 é um ponto estável, temos que H = x0= H e que H é positivamenteinvariante, isto é, T (H)⊂H. Como esse conjunto é unitário, obtemos que T (H) = H, donde x0
é um ponto de equilíbrio.
Definição 2.1.1. Um ponto de equilíbrio x de (1.1) é estável no sentido de Liapunov se para todo
ε > 0 existe um δ > 0 tal que T n(Bδ(x))⊂ Bε(x) para todo n ∈N, isto é, ‖T n(x)−x‖< ε. Além
disso, se para todo x ∈ Bδ(x) tivermos que limn→∞
T n(x) = x, dizemos que x é assintóticamente
estável.
Se um ponto de equilíbrio não é estável, então ele é instável.
Definição 2.1.2. Um funcional V : Rm → R é dito definido positivo com respeito a x se:
1. V (x) = 0.
2. Existe η > 0 tal que V (x) > 0 para qualquer x ∈ Bη(x)−x.
Definição 2.1.3. Seja V : Rm →R, define-se a "derivada" discreta de V com respeito a T como
sendo V (x) := V (T (x))−V (x).
Definição 2.1.4. Seja G⊂ Rm, dizemos que V é uma função de Liapunov para o sistema em G
se:
1. V é contínua em Rm.
2. V (x)≤ 0 para todo x ∈ G.
Proposição 2.1.2 (Teorema de estabilidade de Liapunov).Se x é um ponto de equilíbrio de T , V é uma função de Liapunov para T em alguma
vizinhança de x e V é definida positiva com respeito a x, então x é um ponto de equilíbrio
estável.

Seção 2.1: Método direto de Liapunov 21
Prova:
Tome η suficientemente pequeno de modo que V (x) > 0 e V (x)≤ 0 para todo x em Bη(x) eseja 0 < ε < η.
Seja m := minV (x) : ‖|x− x‖|= ε. Temos que m é positivo.
Seja G = x : V (x) < m2 e G0 a componente conexa de G que contém x. Temos que tanto
G quanto G0 são abertos.
Se x0 ∈ G, então V (x0)≤ 0, assim, V (T (x0))≤V (x0) < m2 , logo T (x0) ∈ G.
x0 e x estão na mesma componente conexa de G, e T (x) = x e T (x0) também estão nessacomponente. Assim G0 é um conjunto aberto e positivamente invariante contendo x e contidoem Bε(x).
Como V é contínua, existe δ > 0 tal que Bδ(x)⊂ G0. Assim, se x0 ∈ Bδ(x), então x0 ∈ G eT (x0)⊂ G0 ⊂ Bε(x).
Proposição 2.1.3. Se V é uma função de Liapunov para (1.1) no conjunto, onde |x| > N e
V (x)→ ∞ quando |x| → ∞, então todas as soluções desse sistema são limitadas.
Prova:
Suponha que exista x0 tal que T n(x0)→ ∞ quando n→ ∞.
Como V é uma função de Liapunov, temos que 0 ≥ V (x0) = V (T (x0))−V (x0), logo 0 ≤V (T (x0)) ≤ V (x0) e via indução finita, 0 ≤ ·· ·V (T n(x0)) ≤ ·· · ≤ V (T 2(x0)) ≤ V (T (x0)) ≤V (x0). Absurdo pois V (x)→ ∞ quando |x| → ∞.
J. P. LaSalle estabeleceu uma relação entre funções de Liapunov e conjuntos ω-limites deBirkhoff, desenvolvendo o Princípio de invariância de LaSalle (Veja LaSalle, [18]).
Teorema 2.1.1 (Princípio de invariância de LaSalle).Se V é uma função de Liapunov para (1.1) em G e se a solução T n(x0) está em G e é
limitada, então existe um número c tal que T n(x0)→ M∩V−1(c), onde M é o maior conjunto
positivamente invariante contido no conjunto E = x ∈ Rm : V (x) = 0∩G 1.
Prova:
Como xn = T n(x0) está em G e é limitada, pelo Teorema 1.4.1, temos que ∅ 6= ω(x0)⊂G exn tende para ω(x0).
Como V é uma função de Liapunov, temos · · ·V (xn)≤ ·· · ≤V (x2)≤V (x1)≤V (x0), isto é,V (xn) é uma seqüência monótona não crescente e como V é limitada inferiormente, temos queV (xn)→ c quando n→ ∞.
1O conjunto E descrito no Teorema 2.1.1 é dito ser um conjunto de LaSalle

22 Capítulo 2: Estabilidade e instabilidade
Figura 2.1: Ilustração do princípio de invariância de LaSalle
Se y ∈ ω(x0) existe uma subseqüência xni tal que xni → y. Assim, V (xni)→V (y) = c, logoV (ω(x0)) = c, conseqüentemente, ω(x0)⊂V−1(c).
Como V (ω(x0)) = c e ω(x0) é positivamente invariante, V (ω(x0)) = 0, assim, xn →ω(x0)⊂x ∈ Rm : V (x) = 0∩G∩V−1(c).
Como ω(x0) é positivamente invariante, temos que ω(x0)⊂M.
O princípio de invariância de LaSalle nos permite estudar a estabilidade das soluções deuma equação de diferenças, não sendo necessário o conhecimento prévio das soluções, paraisso necessitamos de uma função auxiliar V , denominada função de Liapunov. O princípio deinvariância de LaSalle no entanto não nos fornece um método para encontrar uma função deLiapunov e, se o sistema dado pela equação de diferenças for complexo, isto é, suas trajetóriastêm comportamento caótico ou tendem para atratores estranhos por exemplo, dificilmenteencontraremos uma função de Liapunov para esse sistema. Na próxima seção veremos umaversão mais geral do princípio de invariância, na qual não se exige que a derivada discreta dafunção de Liapunov seja sempre não crescente ao longo das soluções.
Como conseqüência do Teorema de estabilidade de Liapunov e do Princípio de invariânciade LaSalle, temos o Teorema de estabilidade assintótica de Liapunov (Veja LaSalle, [18]).
Corolário 2.1.1 (Teorema de estabilidade assintótica de Liapunov).

Seção 2.1: Método direto de Liapunov 23
Se V e −V são positivas definidas com respeito a x, então x é assintoticamente estável.
Prova:
Como V e −V são definidas positivas com respeito a x, existe η > 0 tal que V (x) > 0 e−V (x) > 0 para todo x ∈ Bη(x)− x.
Pelo Teorema de estabilidade de Liapunov temos que x é um ponto de equilíbrio estável, epelo Princípio de invariância de LaSalle temos que se x0 ∈ Bη(x) então T n(x0) → x, logo x éassintoticamente estável.
Proposição 2.1.4. Sejam T : Rm → Rm e V : Rm → R contínuas. Dado L ∈ R tome ξL := x ∈Rm : V (x) < L. Suponha que V (x)≤ 0 para todo x ∈ ξL. Então ξL é positivamente invariante.
Além disso, se ξL é limitado, E := x ∈ ωL : V (x) = 0 e M é o maior conjunto invariante
contido em E, então toda solução iniciando em ξL converge para M quando n→ ∞.
Prova:
Seja x ∈ ξL, temos que V (x) = V (T (x))−V (x) ≤ 0, logo V (T (x)) ≤ V (x) < L e portantoV (T (x)) ∈ ξL. Segue que T n(x) ∈ ξL para todo n ∈ N.
Se ξL é limitado, temos que T n(x) é limitada, logo pelo Teorema 2.1.1, temos que todasolução iniciando em ξL converge para M quando n→ ∞.
Apresentaremos agora dois resultados sobre instabilidade (Veja LaSalle, [18], ou [19]).
Proposição 2.1.5. Seja V definida positiva com respeito a x e seja V assumindo valores
positivos arbitrariamente próximos de x, então x é instável.
Prova:
Assuma que x é estável. Seja ε > 0 suficientemente pequeno de modo que V (x) > 0 sex ∈ Bε(x)−x e seja δ > 0 tal que se x ∈ Bδ(x) então xn = T n(x) ∈ Bε(x) para todo n.
Por hipótese existe x0 ∈ Bδ(x) tal que V (x0) > 0. Como xn ∈ Bε(x), para todo n, peloPrincípio de invariância de LaSalle, temos que xn tende para x∈Rm : V (x) = 0∩Bε(x) = x.
Segue que xn → x, conseqüentemente, V (xn)→V (x) = 0. Mas V (xn) > 0 assim, V (T (xn)) >
V (xn) e portanto V (xn−1) > · · ·> V (x0) > 0. Contradição.
Proposição 2.1.6. Assuma que V toma valores positivos arbitrariamente próximos de x. e
V = βV +W, onde W (x)≥ 0 em alguma vizinhança de x e β > 1. Então a origem é instável.
Prova:

24 Capítulo 2: Estabilidade e instabilidade
Suponha que x seja estável e seja ε > 0 suficientemente pequeno que V (x) > 0 para x ∈Bε(x)−x e δ > 0 tal que se x ∈ Bδ(x) então xn = T n(x) ∈ Bε(x) para todo n.
Por hipótese, existe um ponto x0 ∈ Bδ(x) tal que V (x0) > 0. Como (xn) é limitada epermanece em Bε(x), xn tende para x = x ∈ Rm : V (x) = 0 ∩ Bε(x), pelo Princípio deinvariância.
Como xn → x, temos que V (xn) → V (x) = 0. Mas V (xn) > 0, assim V (xn) ≥ 0, e assimV (xn)≥V (xn−1)≥ ·· ·V (x0) > 0. Essa contradição prova a proposição.
2.2 Versão estendida do princípio de invariânciaSeja Λ um subconjunto compacto de um espaço de Banach E. Nessa seção estudaremos
equações da forma:
x′= T (x(n),n,λ) = Tλ(x(n),n), (2.1)
onde λ ∈ Λ e T : Rm×Z×Λ → Rm é contínua. Uma solução de (2.1) é uma seqüência x(n,λ)que a satisfaz para todo n ∈ N e para todo λ ∈ Λ.
Dada V : Rm × Z× Λ → R, Para cada (x,n,λ) ∈ Rm × Z× Λ definimos V (x,n,λ) :=V (T (x,n,λ),n,λ)−V (x,n,λ).
Na prática trabalhamos com funções de Liapunov generalizadas , cuja derivada discreta podeassumir valores positivos num conjunto limitado. Como veremos no Teorema.da dissipaçãouniforme, com isso podemos trabalhar com uma classe maior de problemas.
O próximo Teorema é um dos resultados mais importantes desse trabalho. Tendo sidodesenvolvido por GABRIEL FILHO sob orientação de RODRIGUES, pode ser encontrado emRODRIGUES, WU, GABRIEL FILHO, [31] ou em GABRIEL FILHO, [8]. Um resultadosimilar pode ser encontrado em (ALBERTO, CALIERO, MARTINS, [2] ou CALIERO, [5]).
Teorema 2.2.1 (Teorema da dissipação uniforme).
Sejam a,b : Rm 7→ R funções contínuas tais que 0 ≤ a(x) ≤ V (x,n,λ) ≤ b(x) para todo
(x,n,λ) ∈ Rm×Z×Λ e a(x) → ∞ quando |x| → ∞. Para todo ρ > 0 defina Aρ := x ∈ Rm :a(x)≤ ρ e Bρ := x ∈ Rm : b(x)≤ ρ.
Assuma que exista H > 0 tal que para todo ρ ∈ [0,H] o conjunto Aρ é conexo e assuma
também que existe uma função contínua c : AH → R tal que −V (x,n,λ) ≥ c(x), pra todo
(x,n,λ) ∈ AH ×Z×Λ, que o conjunto x ∈ AH : c(x) < 0 6= /0 e que C := x ∈ AH : c(x)≤ 0é limitado. Finalmente assuma que existem constantes positivas R, µ e H tais que max
x∈Cb(x) <
R < ∞, −µ < minx∈C
c(x) e R+µ < H, então para cada λ ∈ Λ as seguintes afirmações valem:

Seção 2.2: Versão estendida do princípio de invariância 25
1. Se x0 ∈ BR e se x(n) é a solução de (2.1) com valor inicial x0, então x(n) ∈ AR+µ para
todo n ∈ N.
2. Se x0 ∈ AH então existe n0 = n0(x0,λ) ≥ 0 tal que x(n0) ∈ BR e x(n) ∈ AR+µ para todo
n≥ n0. Em particular, se x ∈ AH é um ponto de equilíbrio de Tλ, então x ∈ BR.
3. Se x0 ∈ AH e x(n) é a solução de (2.1) com valor inicial x(0), então existe uma
subseqüência n j tal que x(n j) ∈ BR.
4. Se x(n) satisfaz (2.1) para todo n ∈ Z e se x(n) ∈ AH para todo n ∈ Z, então x(n) ∈ AR+µ
para todo n ∈ Z. Em particular, toda solução periódica de (2.1) contida em AH está
contida em AR+µ.
(a) Estimativas da função de Liapunov (b) Comportamento das soluções
Figura 2.2: Funções a, V e b do Teorema 2.2.1
Figura 2.3: Estimativa da derivada discreta da função de Liapunov
Prova:

26 Capítulo 2: Estabilidade e instabilidade
Sejam T (.,n) = T (.,n,λ), V (.,n) = V (.,n,λ).1)
Se 0≤ ρ≤ H então Bρ ⊂Vρ ⊂ Aρ; onde Vρ := x ∈ AH : V (x,n)≤ ρ. Temos também queC $ BR.
Se R+µ≤ ρ≤H então Vρ é positivamente invariante com respeito a (2.1). De fato, observeque se x0 ∈ BR, então −V (x(0),0) ≥ c(x0) ≥ −µ e assim, V (T (x(0)))−V (x(0)) = V (x(1))−V (x(0)) = V (x(0))≤ µ e portanto V (x(1))≤V (x(0))+µ≤ b(x0)+µ≤ R+µ≤ ρ.
Isso mostra que se x0 ∈ BR então x(1) ∈ Vρ, noutras palavras, se x(0) ∈ Vρ − BR, entãoc(x(0)) > 0 e assim −V (T (x(0),0) + V (x(0)) = −V (T (x(0),0)) ≥ c(x(0)) > 0; seque queV (x(1)) = V (T (x(0),0)) < V (x(0)) ≤ ρ e via indução finita, temos que Vρ é positivamenteinvariante.
Em particular, se ρ = R+µ e se x(0) ∈ BR, então x(n) ∈VR+µ ⊂ AR+µ para todo n ∈ Z.
2)
Assuma que se x(0) ∈ AH −BR então existe m = m(x(0),λ) tal que x(m) ∈ BR.
Seja ρ = ρ(x(0),λ) := maxV (x(0)),R+µ. Então o conjunto Vρ positivamente invariante.Seja W := Vρ − BR. É fácil ver que se x ∈ W então c(x) > 0. Seja β := min
x∈Wc(x). Como
x(0) ∈W , temos c(x(0) > 0. Então −[V (T (x(0))−V (x(0))] = −V (x(0),0) ≥ c(x(0) ≥ β ouV (T (x(0)))−V (x(0))≤−β e assim V (x(1)) = V (T (x(0),0))≤V (x(0))−β.
Se x(1) ∈ BR acabou, mas se x(1) ∈ Vρ−BR, então repetindo o processo acima, obtemosV (x(2))≤V (x(1))−β≤V (x(0))−2β.
Se x(2) ∈ BR acabou, se não, continuando com esse processo, após n− 1 passagens temosV (x(n)≤V (x(0))−nβ.
Isso Mostra que existe m ∈ N tal que x(m) ∈ BR, senão teríamos uma contradição poisV (x)≥ 0. Isso prova a afirmação.
Se x ∈ AH é um ponto de equilíbrio de Tλ, temos que x = T nλ(x) para todo n ∈ N e pelo que
vimos acima, existe n0 = n0(x,λ) tal que x(n0) = T n0λ
(x) = x ∈ BR, como queríamos.
3)
Conseqüência da afirmação acima.
4)
Suponha que existe m ∈ Z tal que x(m) ∈ AH −VR+µ. Seja κ := minC(x) : x ∈ AH −VR+µ,

Seção 2.2: Versão estendida do princípio de invariância 27
é claro que ν > 0.
De II) segue que x(m− 1) ∈ AH −VR+µ. Então −[V (x(m)−V (x(m− 1))] = −V (T (x(m−1),m−1)≥ c(x(m−1))≥ κ.
Isso implica que V (x(m)) + κV (x(m− 1)). Como x(m− 2) ∈ AH −VR+µ, repetindo oprocesso acima, obtemos V (x(m))+2κ≤V (x(m−n))≤ b(x(m−n)). Isso é uma contradição,pois b é uma função limitada em AH .
Se x(n) = T nλ(x) é uma órbita periódica contida em AH , pela proposição 1.3.5, x(n) admite
um prolongamento em AH para todo n ∈ Z. Assim, x(n) satisfaz (2.1) para todo n ∈ Z e comovimos, x(n) ∈ AR+µ para todo n ∈ Z.
Se x ∈ AH é um ponto de equilíbrio de Tλ, temos que x = T nλ(x) para todo n ∈ N e pelo que
vimos acima, existe n0 = n0(x,λ) tal que x(n0) = T n0λ
(x) = x ∈ BR, como queríamos.
Teorema 2.2.2 (Versão estendida do Princípio de invariância).Sejam T : Rm ×Λ → Rm; V : Rm ×Λ → R+ contínuas e suponha que existam funções
a,c : Rm →R satisfazendo 0≤ a(x)≤V (x,λ) e−V (x,λ)≥ c(x)≥ 0 para todo (x,λ)∈Rm×Λ.
Assuma que para todo H > 0 o conjunto AH := x ∈ Rm : a(x) ≤ H é limitado (isso
acontece por exemplo se a(x)→ ∞ quando |x| → ∞) e seja (x0,λ0) ∈ Rm×Λ.
Então εc := x ∈ Rm : c(x) = 0 6= ∅ e T n(x0,λ0) tende quando n → ∞ para o maior
conjunto invariante contido em εc.
Prova:
Sejam T (.,n) = T (.,n,λ), V (.,n) = V (.,n,λ), uma vez fixado λ.
Po hipótese, −V (x) ≥ c(x) ≥ 0 ∀ x ∈ Rm, logo V (x) ≤ (0) ∀ x ∈ Rm e conseqüentementeV (x) = V (T (x))−V (x)≤ 0⇒V (T (x))≤V (x), e via indução finita:
· · · ≤V (T n(x))≤ ·· · ≤V (T 2(x))≤V (T (x))≤V (x) =: ρ.
V (T n(x)) é uma seqüência monótona num conjunto limitado, e portanto convergente,digamos V (T n(x))→ c quando n→ ∞.
Como T n(x) está contida num compacto, pelo Teorema 1.4.1, ω(x) é não vazio, e se y ∈ω(x) existe subseqüência T nk(x)→ y. Também pelo Teorema 1.4.1 ω(x) é invariante, portantoT (y) ∈ ω(x) e T nk+1(x)→ T (y).
Temos que c = limn→∞
V (T nk(x)) = V (y) e c = limn→∞
V (T nk+1(x)) = V (T (y)), logo V (y) = 0 e
visto que 0≤ c(y)≤−V (y) temos que c(y) = 0, logo εc 6= ∅ e ω(x)⊂ εc.
Finalmente, pelo princípio de invariância de LaSalle, concluímos que T n(x) converge parao maior conjunto invariante contido em εc.

28 Capítulo 2: Estabilidade e instabilidade
2.3 Simulações e exemplosNessa seção, apresentaremos alguns exemplos no qual o Teorema de dissipação uniforme é
aplicável.
Exemplo 2.3.1 (Lorenz discreto I).
O seguinte sistema contínuo é uma variação do sistema de Lorenz e foi estudado por
RODRIGUES e GAMEIRO, (veja [30]), na qual se propunha uma análise em sistemas de
comunicação.
x(t) =−ax(t)+ay(t)y(t) =−y(t)− r
4(x(t)+α(t))− (x(t)+α(t))z(t)z(t) =−bz(t)+(x+α(t))− 5
4br
α é o sinal a ser transmitido e os parâmetros a, b, e r são tais a manter o comportamento
caótico do sistema para garantir a segurança na comunicação.
Considere o sistema obtido pela discretização do sistema de Lorenz (via método iterativo de
Euler), a ∈ [am,aM]; r ∈ [rm,rM]; b ∈ [bm,bM]; h ∈ R+, α(n) = αn ∈ l∞ e λ = (a,b,r,(αn),h):
x(n+1) = x(n)+h[−ax(n)+ay(n)]y(n+1) = y(n)+h[−y(n)− r
4(x(n)+αn)− (x(n)+αn)z(n)]z(n+1) = z(n)+h[−bz(n)+(x(n)+αn)y(n)− 5
4br]
(2.2)
Considere a função de Liapunov generalizada V (x,y,z,λ) = rx2 + 4ay2 + 4az2 para esse
sistema. É fácil tomar funções a e b como no teorema de dissipação uniforme, observando que
as seguintes desigualdades são válidas:
a(x,y,z) := rmx2 +4amy2 +4amz2 ≤V (x,y,z,λ)≤ rMx2 +4aMy2 +4aMz2 =: b(x,y,z).
A escolha da função c não é tão imediata. Calculemos inicialmente −V :
−V (x,y,z,n,λ) = rx2 +4ay2 +4az2−rx +h[−ax +ay]2 +4ay+h[−y− r4(x +αn)− (x +
αn)z]2 +4az+h[−bz+(x+αn)y− 54br]2=
rx2 + 4ay2 + 4az2 − rx + h[−ax + ay]2 − 4ay + h[−y− r4(x + αn)− (x + αn)z]2 − 4az +
h[−bz+(x+αn)y− 54br]2 =
rx2 + 4ay2 + 4az2 − rx2 + 2hx[−ax + ay] + h2[−ax + ay]2− 4ay2 + 2hy[−y− r4(x + αn)−
(x+αn)z]+h2[−y− r4(x+αn)−(x+αn)z]2−4az2 +2hz[−bz+(x+αn)y− 5
4br]+h2[−bz+(x+αn)y− 5
4br]2=

Seção 2.3: Simulações e exemplos 29
rx2 +4ay2 +4az2−rx2−2hrx[−ax+ay]−h2r[−ax+ay]2−4ay2−8hay[−y− r4(x+αn)−(x+
αn)z]−4h2a[−y− r4(x+αn)− (x+αn)z]2−4az2−8haz[−bz+(x+αn)y− 5
4br]−4h2a[−bz+(x+αn)y− 5
4br]2 =
−2hrx[−ax+ay]−h2r[−ax+ay]2−8hay[−y− r4(x+αn)−(x+αn)z]−4h2a[−y− r
4(x+αn)−(x+αn)z]2−8haz[−bz+(x+αn)y− 5
4br]−4h2a[−bz+(x+αn)y− 54br]2 =
h−2rx[−ax + ay] − 8ay[−y − r4(x + αn) − (x + αn)z] − 8az[−bz + (x + αn)y − 5
4br] +h2−r[−ax+ay]2−4a[−y− r
4(x+αn)− (x+αn)z]2−4a[−bz+(x+αn)y− 54br]2=
h2arx2 − 2arxy + 8ay2 + 2ar(x + αn)y + 8a(x + αn)yz + 8abz2 − 8a(x + αn)yz + 10abrz+h2−r[−ax−ay]2−4a[−y− r
4(x+αn)− (x+αn)z]2−4a[−bz+(x+αn)y− 54br]2=
h2arx2 − 2arxy + 8ay2 + 2arxy + 2aαnry + 8axyz + 8aαnyz + 8abz2 − 8axyz − 8aαnyz +10abrz+h2−r[−ax−ay]2−4a[−y− r
4(x+αn)−(x+αn)z]2−4a[−bz+(x+αn)y− 54br]2=
h2arx2 + 8ay2 + 8abz2 + 2aαnry + 10abrz+ h2−r[−ax− ay]2− 4a[−y− r4(x + αn)− (x +
αn)z]2−4a[−bz+(x+αn)y− 54br]2
Assim, −V (x,y,z)h = 2arx2 + 8ay2 + 8abz2 + 2aαnry + 10abrz + hg(x,y,z,n,λ) ≥ 2amrmx2 +
8amy2 + 8ambmz2 − 2aM|αn|rM|y| − 10aMbMrM|z| − h|g(x,y,z,n,λ)|, onde assumiremos que
|αn| ≤ γ para todo n ∈ N.
Seja d(x,y,z) := 2amrmx2 + 8amy2 + 8ambmz2 − 2aMγrM|y| − 10aMbMrM|z|.
Completando quadrados, temos d(x,y,z) = 2amrmx2 + 8am
[y2−2|y|aMγrM
8am+(
aMγrM8am
)2]
+
8ambm
[z2−2|z|5aMbMrM
8ambm+(
5aMbMrM8ambm
)2]− (aMγrM)2
8am− (5aMbMrM)2
8ambm= 2amrmx2 + 8am[|y| −
aMγrM8am
]2 +8ambm[|z|− 5aMbMrM8ambm
]2− (aMγrM)2
8am− (5aMbMrM)2
8ambm.
Segue que o mínimo de d é − (aMγrM)2
8am− (5aMbMrM)2
8ambm< 0.
Seja D := (x,y,z) : d(x,y,z) ≤ 0 e sejam R1 e R tais que maxb(x,y,z);(x,y,z) ∈ D <
R1 < R. Escolheremos H tão grande quanto R.
Dado δ > 0, existe h0 > 0, suficientemente pequeno e tal que h max|g(x,y,z,n,λ);(x,y,z)∈AH |< δ se 0 < h < h0.
Seque que se (x,y,z) ∈ AH , então d(x,y,z) − |hg(x,y,z)| ≥ d(x,y,z) − (aMγrM8am
)2 −(5aMbMrM
8ambm)2−δ =: d1(x,y,z).
Para C := (x,y,z) : d1(x,y,z)≤ 0, podemos mostrar que se δ é suficientemente pequeno,
então existe h0 tal que maxb(x,y,z) : (x,y,z) ∈ C< R para todo 0 < h < h0.

30 Capítulo 2: Estabilidade e instabilidade
Se c(x,y,z) := hd1(x,y,z) temos que −V (x,y,z,n,λ)≥ c(x,y,z), ∀ (x,y,z) ∈ AH .
O mínimo de c(x,y,z) em C é dado por −h[ (aMrMγ)2
8am+ (5aMbMrM)2
8ambm+ δ] ≥ −h0[
(aMrMγ)2
8am+
(5aMbMrM)2
8ambm+ δ] > −µ, para um µ > 0 apropriado, o qual pode ser tomado pequeno, se h0 for
suficientemente pequeno.
Tomando então h0 suficientemente pequeno que R + µ < H, então todas as condições do
Teorema 2.2.1 estão satisfeitas para todo 0 < h < h0 e assim, o atrator está contido em AR+µ.
É importante determinar o máximo de b(x,y,z) em D que irá ocorrer na fronteira de D ,
que é um elipsóide. Pelo método dos multiplicadores de Lagrange:bx = βdx
by = βdy
bz = βdz
d(x,y,z) = 0
,
obtemos o sistema:2rMx = β4amrmx (1)
8aMy = β(16amy−2aMγrM) (2)
8aMz = β(16ambmz−10aMbMrM) (3)
2amrmx2 +8am[|y|− aMγrM8am
]2 +8ambm[|z|− 5aMbMrM8ambm
]2 = (aMγrM)2
8am+ (5aMbMrM)2
8ambm(4)
.
De (1), (2) e de (3) obtemos respectivamente x = 0, y = βaMγrM8βam−4aM
e z = 5βaMbMrM8βambm−4aM
.
Substuindo em (4):
8am[ βaMγrM8βam−4aM
− aMγrM8am
]2 +8ambm[ 5βaMbMrM8βambm−4aM
− 5aMbMrM8ambm
]2 = (aMγrM)2
8am+ (5aMbMrM)2
8ambm⇒
8am[2βaMamrMγ−2βaMamrMγ+a2MrMγ
16βa2m−8aMam
]2 +8ambm[10βaMambMbmrM−10βaMambMbmrM+5a2MbMrM
16βa2mb2
m−8aMambm]2 =
bm(aMγrM)2+(5aMbMrM)2
8ambm⇒
bm[ a2MrMγ
2βam−aM]2 +[ 5a2
MbMrM2βambm−aM
]2 = (aMrM)2[bmγ2 +(5bM)2]⇒
bm[ aMγ
2βam−aM]2 +[ 5aMbM
2βambm−aM]2 = [bmγ2 +(5bM)2]⇒
bm(aMγ)2(2βambm−aM)2 +(5aMbM)2(2βam−aM)2 =[bmγ2 +(5bM)2](2βam−aM)2(2βambm−aM)2 ⇒
Obtemos então uma equação polinomial de grau 4 em β, que foi resolvida numericamente,
usando Mathematica, tomando γ = 4 e supondo que os parâmetros a, r e b valem 10, 28 e 83
respectivamente com uma incerteza de 2%. Temos então:

Seção 2.3: Simulações e exemplos 31
am = a− 2a100 = 49
5 , aM = a+ 2a100 = 51
5 ,
rm = r− 2r100 = 686
25 , rM = r + 2r100 = 714
25 ,
bm = b− 2b100 = 196
75 , bM = b+ 2b100 = 204
75
Resolvendo essa equação, encontramos os valores β = 0, β = 0.756499 e mais duas raízes
complexas não reais. β = 0 dá o mínimo e β = 0.756499 dá o máximo para a função b no
elipsóide (x,y,z) : d(x,y,z) = 0.
Substituindo nas equações de Lagrange, encontramos o ponto (xM,yM,zM) =(0,47.6246,9.64912) que realiza o valor máximo para a função b nesse elipsóide. Assim, o
valor máximo para b no elipsóide é b(xM,yM,zM) = 96337.4.
Escolhemos então R1 = 96400, R = 96999, H = 300000 e δ = 1O mínimo da função d é aproximadamente 594,81, −V (x,y,z,n,λ) ≥ hd1(x,y,z) =
c(x,y,z) >−596h > 596h0. Se h0 < 1596 temos c(x,y,z) >−1 :=−µ.
Conseqüentemente, aplicando o Teorema 2.2.1 concluímos que o atrator está contido no
elipsóide AR+µ = A97000 = (x,y,z) ∈ AH : rmx2 +4amy2 +4amz2 ≤ 97000
Utilizando MATLAB 7.1 com a seqüência de comandos:
clear; close all;
x(1) = 30; y(1) = 0; z(1) = 80; h = 1/597;
a = 10; r = 28; b = 8/3;
for i=1:8000
x(i + 1) = x(i) + h*(-a*x(i) + a*y(i));
y(i + 1) = y(i) + h*(-y(i) - r/4*(x(i) + 4*cos(i)) - (x(i) + 4*cos(i))*z(i));
z(i + 1) = z(i) + h*(-b*z(i) + (x(i) + 4*cos(i))*y(i) - 5/4*b*r);
end
plot3(x,y,z,’.b’); xlabel(’x(n)’); ylabel(’y(n)’); zlabel(’z(n)’); hold on; grid;
am = 98/100*a; rm = 98/100*r;
zMax = sqrt(97000/(4*am)); rz = 2*zMax/12;
for i=1:12
nivz(i) = zMax - i*rz;
xMax(i) = sqrt((97000 - 4*am*nivz(i)^2)/rm);
r(i)=2*xMax(i)/10000;
for j=1:10000
xnivz(j) = -xMax(i) + j*r(i);
ynivz(j) = sqrt((97000 - rm*xnivz(j)^2 - 4*am*nivz(i)^2)/(4*am));
znivz(j) = nivz(i);
end
plot3(xnivz, ynivz, znivz,’g’); xlabel(’y(n)’); ylabel(’x(n)’);zlabel(’z(n)’); hold on;
plot3(xnivz, -ynivz, znivz,’g’); xlabel(’y(n)’); ylabel(’x(n)’);zlabel(’z(n)’); hold on;
end

32 Capítulo 2: Estabilidade e instabilidade
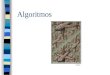
Obtivemos as seguintes imagens, que mostram o comportamento assintótico de
(x(n),y(n),z(n)), n ∈ N sob diferentes ângulos:
Figura 2.4: Estimativa uniforme do atrator de Lorenz.
(a) Projeção em x = 0 (b) Projeção em y = 0 (c) Projeção em z = 0
Figura 2.5: Projeções da estimativa uniforme do atrator de Lorenz

Seção 2.3: Simulações e exemplos 33
Exemplo 2.3.2 (Lorenz discreto II).O seguinte sistema contínuo foi obtido de [32]:
x =− x4 − y2− z2 +2
y =−y+ xy−4xz+1z = 4xy+ xz− z
Aqui consideraremos o sistema discreto correspondente via o método iterativo de Euler:x(n+1) = x(n)+h[−1
4x(n)− y(n)2− z(n)2 +2]y(n+1) = y(n)+h[−y(n)+ x(n)y(n)−4x(n)z(n)+1]z(n+1) = z(n)+h[4x(n)y(n)+ x(n)z(n)− z(n)]
Apesar de não termos variação de parâmetros neste exemplo, podemos utilizar o Teorema
2.2.1 considerando que este sistema está parametrizado com um parâmetro fixo.
Para obter uma estimativa do atrator desse sistema, usaremos a função de Liapunov
generalizada V (x,y,z) = 12
[(x− 1
2
)2 + y2 + z2]. Utilizaremos a própria função V para ser
as funções a e b do Teorema 2.2.1, isto é, a(x,y,z) = V (x,y,z) = b(x,y,z), para todo (x,y,z) em
R3, neste caso.
Como no exemplo anterior, para determinar uma função c vamos inicialmente calcular−V .
−V (x,y,z) = 12 [(x− 1
2)2 + y2 + z2]− 12[x+h(− x
4 − y2− z2 +2)]− 12
2 +[y+h(−y+ xy−4xz+1)]2 +[z+h(4xy+ xz− z)]2=
12(x− 1
2)2 + 12y2 + 1
2z2− 12[x+h(− x
4 − y2− z2 +2)]− 12
2− 12 [y+h(−y+ xy−4xz+1)]2−
12 [z+h(4xy+ xz− z)]2 =
12(x2− x+ 1
4)+ 12y2 + 1
2z2− 12[x+h(− x
4 − y2− z2 +2)]2− [x+h(− x4 − y2− z2 +2)]+ 1
4−12 [y2 +2hy(−y+ xy−4xz+1)+h2(−y+ xy−4xz+1)2]− 1
2 [z2 +2hz(4xy+ xz− z)+h2(4xy+xz− z)2] =
12x2− 1
2x+ 18 + 1
2y2 + 12z2− 1
2 [x+h(− x4 −y2−z2 +2)]2 + 1
2 [x+h(− x4 −y2−z2 +2)]− 1
8 −12y2−
hy(−y+xy−4xz+1)− 12h2(−y+xy−4xz+1)2− 1
2z2−hz(4xy+xz−z)− 12h2(4xy+xz−z)2 =
12x2− 1
2x− 12 [x+h(− x
4 − y2− z2 +2)]2 + 12 [x+h(− x
4 − y2− z2 +2)]−hy(−y+ xy−4xz+1)−12h2(−y+ xy−4xz+1)2−hz(4xy+ xz− z)− 1
2h2(4xy+ xz− z)2 =
12x2− 1
2x− 12 [x+h(− x
4 − y2− z2 +2)]2 + 12x+ 1
2h(− x4 − y2− z2 +2)+hy2−hxy2 +4hxyz−
hy− 12h2(−y+ xy−4xz+1)2−4hxyz−hxz2 +hz2− 1
2h2(4xy+ xz− z)2 =
12x2− 1
2 [x+h(− x4 − y2− z2 +2)]2 + 1
2h(− x4 − y2− z2 +2)+hy2−hxy2−hy− 1
2h2(−y+ xy−4xz+1)2−hxz2 +hz2− 1
2h2(4xy+ xz− z)2 =

34 Capítulo 2: Estabilidade e instabilidade
12x2− 1
2 [x2 +2hx(− x4 − y2− z2 +2)+h2(− x
4 − y2− z2 +2)2]+ 12h(− x
4 − y2− z2 +2)+hy2−hxy2−hy− 1
2h2(−y+ xy−4xz+1)2−hxz2 +hz2− 12h2(4xy+ xz− z)2 =
12x2− 1
2x2−hx(− x4 − y2− z2 +2)− 1
2h2(− x4 − y2− z2 +2)2−h x
8 −12hy2− 1
2hz2 +h+hy2−hxy2−hy− 1
2h2(−y+ xy−4xz+1)2−hxz2 +hz2− 12h2(4xy+ xz− z)2 =
−hx(− x4 − y2− z2 +2)− 1
2h2(− x4 − y2− z2 +2)2−h x
8 −12hy2− 1
2hz2 +h+hy2−hxy2−hy−12h2(−y+ xy−4xz+1)2−hxz2 +hz2− 1
2h2(4xy+ xz− z)2 =
h[−x(− x4 − y2− z2 +2)− x
8 −12y2− 1
2z2 +1+ y2− xy2− y− xz2 + z2]+h2[−12(− x
4 − y2− z2 +2)2− 1
2(−y+ xy−4xz+1)2− 12(4xy+ xz− z)2] =
Assim:
−Vh =−x(− x
4 − y2− z2 +2)− x8 −
12y2− 1
2z2 +1+ y2− xy2− y− xz2 + z2 +h[−12(− x
4 − y2−z2 +2)2− 1
2(−y+ xy−4xz+1)2− 12(4xy+ xz− z)2] =
x2
4 + xy2 + xz2−2x− x8 −
12y2− 1
2z2 +1+ y2− xy2− y− xz2 + z2 +hg(x,y,z) =
x2
4 + 12y2 + 1
2z2− 178 x− y+1+hg(x,y,z)≥
x2
4 + 12y2 + 1
2z2− 178 |x|− |y|+1−|hg(x,y,z)|
Seja d(x,y,z) = x2
4 + 12y2 + 1
2z2− 178 |x|− |y|+1. Completando quadrados, temos:
d(x,y,z) = 14(x2 − 17
2 |x|+28916 )− 289
64 + 12(y2 − 2|y|+ 1)− 1
2 + 12z2 + 1 = 1
4(|x| − 174 )2 +
12(|y|−1)2 + 1
2z2− 25764
Seja D := (x,y,z) : d(x,y,z) ≤ 0 e sejam R1 e R tais que maxb(x,y,z);(x,y,z) ∈ D <
R1 < R. Escolheremos H tão grande quanto R.
É importante determinar o máximo de b(x,y,z) em D que irá ocorrer na fronteira de D ,
que é um elipsóide. Pelo método dos multiplicadores de Lagrange:Vx = λbx
Vy = λby
Vz = λbz
d(x,y,z) = 0
;
obtemos o sistema:x− 1
2 = λ12(x− 17
4 ) (1)y = λ(y−1) (2)z = λz (3)
14(x− 17
4 )2 + 12(y−1)2 + 1
2z2 = 25764 (4)
.

Seção 2.3: Simulações e exemplos 35
De (3), λ = 1 ∀ z (não por (2)) ou z = 0 ∀ λ; de (2), y = 1λ−1 ; de (1), x = 17λ−4
4λ−8 ; substituindo
em (4):
14
(17λ−44λ−8 −
174
)2+ 1
2
(1
λ−1 −1)2
= 25764 ⇒ 1
4
(−15
4λ−2
)2+ 1
2
(−λ+2λ−1
)2= 257
64 ⇒
22516λ2−64λ+64 + λ2−4λ+4
2λ2−4λ+2 = 25764 ⇒ (450λ2−900λ+450)+(16λ4−128λ3+384λ2−512λ+256)
32λ4−192λ3+416λ2−384λ+128 = 25764 ⇒
16λ4−128λ3+834λ2−1412λ+70632λ4−192λ3+416λ2−384λ+128 = 257
64 ⇒
257(λ4−6λ3 +13λ2−12λ+4) = 2(16λ4−128λ3 +834λ2−1412λ+706) ⇒
257λ4−1542λ3 +3341λ2−3084λ−1028 = 32λ4−256λ3 +1668λ2−2824λ+1412 ⇒
225λ4−1286λ3 +1673λ2−260λ−2440 = 0 ⇒
Este polinômio foi resolvido numericamente usando MATHEMATICA, e foram encontradas
as seguintes raízes 4.139685744, −0.8657600199 e mais duas raízes complexas. A primeira dá
o máximo para V em d−1(0), e a segunda dá o mínimo.
Substituindo nas equações de Lagrange, encontramos x = 7.755187626, y = 0.3185032139e z = 0. Após alguns cálculos, obtemos que o máximo que V assume é 26.36959590.
Assim, o atrator está contido no elipsóide A27 = (x,y,z) ∈ R3 : 12
(x− 1
2
)2 + 12y2 + 1
2z2 ≤27.
Utilizando MATLAB 7.1 com a seqüência de comandos:
x(1) = -6; y(1) = -3; z(1) = 5; h = 0.01;
for i=1:60000
x(i + 1) = x(i) + h*(-x(i)/4 - y(i)^2 - z(i)^2 + 2);
y(i) + h*(-y(i) + x(i)*y(i) - 4*x(i)*z(i) + 1);
z(i + 1) = z(i) + h*(4*x(i)*y(i) + x(i)*z(i) - z(i));
end
plot3(x,y,z,’.b’); xlabel(’x(n)’); ylabel(’y(n)’); zlabel(’z(n)’); hold on; grid;
zM = sqrt(2*27); rz = 2*zM/8;
for i=1:8
nivz(i) = zM - i*rz; xM(i) = sqrt(2*27 - nivz(i)^2);
for j=1:10000
r(i)=2*xM(i)/10000;
xnivz(j) = -xM(i) + j*r(i);
ynivz(j) = sqrt(2*27 - nivz(i)^2 - xnivz(j)^2);
znivz(j) = nivz(i);
end
plot3(xnivz + 1/2, ynivz, znivz,’.g’); xlabel(’y(n)’); ylabel(’x(n)’);zlabel(’z(n)’); hold on;
plot3(-xnivz + 1/2, ynivz, znivz,’.g’); xlabel(’y(n)’); ylabel(’x(n)’);zlabel(’z(n)’); hold on;
end

36 Capítulo 2: Estabilidade e instabilidade
(a) Estimativa do atrator (b) Atrator: nesta figura plotei os ultimos 20000pontos
(c) Projeção em y = 0
Figura 2.6:
Exemplo 2.3.3.O sistema contínuo x
′′+αx
′+ωx+(q cos(t)+x2)x = 0 foi estudado por Afraimovich (Veja
[1]), e é equivalente a: x′= y
y′=−αy−ωx− (q cos(t)+ x2)x
.
Considere o sistema discreto correspondente (via método iterativo de Euler).x(n+1) = x(n)+hy(n)y(n+1) = y(n)+h−αy(n)−ωx(n)− (q cos(n)+ x(n)2)x(n)
(2.3)
Onde λ := (α,ω,q, t).
Para determinar uma estimativa do atrator de 2.3, usaremos a função de Liapunov
V (x,y) = 12ωx2 + 1
4x4 + 12y2 + εxy.
É fácil ver que a(x,y) ≤ V (x,y) ≤ b(x,y), onde a(x,y) = 12ωmx2 + 1
4x4 + 12y2− ε|xy| e
b(x,y) = 12ωMx2 + 1
4x4 + 12y2 + ε|xy|, então:

Seção 2.3: Simulações e exemplos 37
−V (x,y) = (12ωx2 + 1
4x4 + 12y2 + εxy)−1
2ω(x+hy)2 + 14(x+hy)4 + 1
2y+h[−αy−ωx−(q cos(t)+ x2)x]2 + ε(x+hy)y+h[−αy−ωx− (q cos(t)+ x2)x]=
12ωx2 + 1
4x4 + 12y2 + εxy− 1
2ω(x+hy)2− 14(x+hy)4− 1
2y+h[−αy−ωx− (q cos(t)+x2)x]2− ε(x+hy)y+h[−αy−ωx− (q cos(t)+ x2)x]=
12ωx2 + 1
4x4 + 12y2 + εxy− 1
2ω(x2 +2hxy+h2y2)− 14(x4 +4hx3y+6h2x2y2 +4h3xy3 +h4y4)−
12y2 +2hy[−αy−ωx− (q cos(t)+ x2)x]+h2[−αy−ωx− (q cos(t)+ x2)x]2− (εx+
εhy)y+h[−αy−ωx− (q cos(t)+ x2)x]=
12ωx2 + 1
4x4 + 12y2 + εxy− 1
2ωx2−ωhxy− 12ωh2y2− 1
4x4−hx3y− 32h2x2y2−h3xy3− 1
4h4y4−12y2−hy[−αy−ωx− (q cos(t)+ x2)x]− 1
2h2[−αy−ωx− (q cos(t)+ x2)x]2−εxy+εhx[−αy−ωx− (q cos(t)+ x2)x]+ εhy2 + εh2y[−αy−ωx− (q cos(t)+ x2)x]=
εxy−ωhxy− 12ωh2y2−hx3y− 3
2h2x2y2−h3xy3− 14h4y4−hy[−αy−ωx− (q cos(t)+ x2)x]−
12h2[−αy−ωx− (q cos(t)+ x2)x]2−εxy+ εhx[−αy−ωx− (q cos(t)+ x2)x]+ εhy2 +
εh2y[−αy−ωx− (q cos(t)+ x2)x]=
εxy−ωhxy−hx3y+αhy2 +ωhxy+h(q cos(t)+ x2)xy− εxy− εhx[−αy−ωx− (q cos(t)+x2)x]− εhy2 +h2−1
2ωy2− 32x2y2−hxy3− 1
4h2y4− 12 [−αy−ωx− (q cos(t)+ x2)x]2−
εy[−αy−ωx− (q cos(t)+ x2)x]=
h−x3y+αy2 +(q cos(t)+ x2)xy− εx[−αy−ωx− (q cos(t)+ x2)x]− εy2+h2−12ωy2−
32x2y2−hxy3− 1
4h2y4− 12 [−αy−ωx− (q cos(t)+ x2)x]2− εy[−αy−ωx− (q cos(t)+ x2)x]=
h−x3y+αy2 +(q cos(t)+ x2)xy+αεxy+ εωx2 + ε(q cos(t)+ x2)x2− εy2+o(h2)
Assim:
−Vh (x,y) =−x3y+αy2 +(q cos(t)+ x2)xy+αεxy+ εωx2 + ε(q cos(t)+ x2)x2− εy2 +o(h) =
−x3y+αy2 +q cos(t)xy+ x3y+αεxy+ εωx2 + εq cos(t)x2 + εx4− εy2 +o(h) =
αy2 +q cos(t)xy+αεxy+ εωx2 + εq cos(t)x2 + εx4− εy2 +o(h)≥
αy2−q|xy|−αε|xy|+ εωx2− εqx2 + εx4− εy2 +o(h)≥
αy2−qM|x||y|−αMε|x||y|+ εωmx2− εqMx2 + εx4− εy2 +o(h) =
εx4− ε(qM −ωm)︸ ︷︷ ︸A
x2− (qM +αMε)︸ ︷︷ ︸B
|x||y|+(α− ε)y2 +o(h)≥
εx4−Ax2−B|x||y|+ εy2 +o(h)Seja d(x,y) := εx4−Ax2−B|x||y|+ εy2; completando quadrados, temos:
εx4−Ax2 + ε(y2−B|x||y|) =

38 Capítulo 2: Estabilidade e instabilidade
εx4−Ax2 + ε[y2−2 B2ε|x||y|+( B
2ε)2x2]− B2
4εx2 =
x2[εx2− (A+B2
4ε)︸ ︷︷ ︸
C
]+ ε[|y|− B2ε|x|]2
Como ε[|y|− B2ε|x|]2 ≥ 0 para todo x e para todo y, o mínimo de d é atingido quando este
termo se anula e x2[εx2−C] atinge seu mínimo.
Pelo método da primeira e segunda derivadas, encontramos os pontos críticos de x2[εx2−C].
0 é o ponto de máximo e o mínimo ocorre em ±√ c
2ε.
O valor mínimo de x2[εx2−C] é:
(√ c
2ε)2[ε(
√ c2ε
)2−C] = c2ε
[ε c2ε−C] = c
2ε[ c
2 −C] = c2ε
[− c2 ] =− c2
4ε
Conseqüentemente, −Vh (x,y)≥− c2
4ε+ ε[|y|− B
2ε|x|]2.
− c2
4ε+ ε[|y|− B
2ε|x|]2 = 0⇒
ε[|y|− B2ε|x|]2 = c2
4ε⇒ |y|− B
2ε|x|=± C
2ε.
Segue que a região onde d(x,y) < 0 é limitada.
Pela simetria da função | |, é suficiente descrevermos o conjunto dos pontos do primeiro
quadrante que cumprem essa desigualdade, que os demais serão obtidos por reflexão destes
com respeito aos eixos coordenados. Assim é suficiente plotarmos o seguinte par de retas no
primeiro quadrante: y− B2ε
x =± C2ε
.
I) y− B2ε
x =− C2ε
:
Se y = 0 então − B2ε
x =− C2ε⇒ Bx = C ⇒ x = C
B .
Se x =√ c
εentão y− B
2ε
√ cε=− C
2ε⇒ y = B
2ε
√ cε− C
2ε= 1
2ε(B√ c
ε−C).
II) y− B2ε
x = C2ε
:
Se x = 0 então y = C2ε
.
Se x =√ c
εentão y− B
2ε
√ cε= C
2ε⇒ y = B
2ε
√ cε+ C
2ε= 1
2ε(B√ c
ε+C).
É importante encontrarmos o máximo de b(x,y) em D = (x,y) ∈ R2 : d(x,y) ≤ 0 o qual
vai ocorrer na fronteira de D , visto que b é uma função convexa.
Se b(x,y) = 12ωMx2 + 1
4x4 + 12y2 + εxy e ϕ(x,y) =
√−x4 + C
εx2 + B
2εx− y, pelo método dos
multiplicadores de Lagrange:

Seção 2.3: Simulações e exemplos 39
Figura 2.7: Como pode ser observado, a região onde d(x,y) < 0 é limitada.
bx = λϕx
by = λϕy
ϕ(x,y) = 0
.
obtemos o sistema:ωMx+ x3 + εy = λ[1
2(−4x3 + 2Cε
x)(−x4 + Cε
x2)−12 + B
2ε] (1)
y+ εx = −λ (2)
y =√−x4 + C
εx2 + B
2εx (3)
.
De (2), λ =−y− εx. Substituindo em (1):
ωMx+ x3 + εy = (−y− εx)[12(−4x3 + 2C
εx)(−x4 + C
εx2)−
12 + B
2ε]⇒
ωMx+ x3 + εy =−y[1
2(−4x3 + 2Cε
x)(−x4 + Cε
x2)−12 ]− εx[1
2(−4x3 + 2Cε
x)(−x4 + Cε
x2)−12 ]− B
2εy− B
2 x ⇒
ωMx+ x3 + εy =−y2 [(−4x3 + 2C
εx)(−x4 + C
εx2)−
12 ]− εx
2 [(−4x3 + 2Cε
x)(−x4 + Cε
x2)−12 ]− B
2εy− B
2 x ⇒
ωMx+ x3 + εy = −y2 [−4x3(−x4 + C
εx2)−
12 + 2C
εx(−x4 + C
εx2)−
12 ]− ε
2x[−4x3(−x4 + Cε
x2)−12 +
2Cε
x(−x4 + Cε
x2)−12 ]− B
2εy− B
2 x ⇒

40 Capítulo 2: Estabilidade e instabilidade
ωMx+x3 +εy = 2x3y(−x4 + Cε
x2)−12 − C
εxy(−x4 + C
εx2)−
12 +2εx4(−x4 + C
εx2)−
12 −Cx2(−x4 +
Cε
x2)−12 − B
2εy− B
2 x ⇒
De (3), y =√−x4 + C
εx2 + B
2εx
ωMx+ x3 + ε[(−x4 + Cε
x2)12 + B
2εx] =
2x3[(−x4 + Cε
x2)12 + B
2εx](−x4 + C
εx2)−
12 − C
εx[(−x4 + C
εx2)
12 + B
2εx](−x4 + C
εx2)−
12 +
2εx4(−x4 + Cε
x2)−12 −Cx2(−x4 + C
εx2)−
12 − B
2ε[(−x4 + C
εx2)
12 + B
2εx]− B
2 x ⇒
ωMx+ x3 + ε(−x4 + Cε
x2)12 + B
2 x =[2x3(−x4 + C
εx2)
12 + B
εx4](−x4 + C
εx2)−
12 +[−C
εx(−x4 + C
εx2)
12 − BC
2ε2 x2](−x4 + Cε
x2)−12 +
2εx4(−x4 + Cε
x2)−12 −Cx2(−x4 + C
εx2)−
12 − B
2ε(−x4 + C
εx2)
12 − B2
4ε2 x− B2 x ⇒
ωMx+ x3 + ε(−x4 + Cε
x2)12 + B
2 x = 2x3 + Bεx4(−x4 + C
εx2)−
12 − C
εx− BC
2ε2 x2(−x4 + Cε
x2)−12 +
2εx4(−x4 + Cε
x2)−12 −Cx2(−x4 + C
εx2)−
12 − B
2ε(−x4 + C
εx2)
12 − B2
4ε2 x− B2 x ⇒
−x3 +(ωM +B+ B2
4ε2 + Cε)x =
(Bεx4 +2εx4− BC
2ε2 x2−Cx2)(−x4 + Cε
x2)−12 − (ε+ B
2ε)(−x4 + C
εx2)
12 ⇒
x[−x2 +(ωM +B+ B2
4ε2 + Cε)](−x4 + C
εx2)
12 =
(Bεx4 +2εx4− BC
2ε2 x2−Cx2)− (ε+ B2ε
)(−x4 + Cε
x2)⇒
Se x 6= 0[−x2 +(ωM +B+ B2
4ε2 + Cε)](−x2 + C
ε)
12 = (B
εx2 +2εx2− BC
2ε2 −C)− (ε+ B2ε
)(−x2 + Cε)⇒
Seja g(x,y) := [−x2 + (ωM + B + B2
4ε2 + Cε)](−x2 + C
ε)
12 − (B
εx2 + 2εx2 − BC
2ε2 −C) + (ε +B2ε
)(−x2 + Cε).
g(x,y) = 0 foi resolvida numericamente usando MATHEMATICA, e considerando que os
parâmetros variam com uma incerteza de 2% com relação aos valores básicos α = 1, ω = 1,
q = 50,
αm = (1− 2100)α = 49
50 , αM = (1+ 2100)α = 51
50 ,
ωm = (1− 2100)ω = 49
50 , ωM = (1+ 2100)ω = 51
50 ,
qm = 50−1 = 49, qM = 50+1 = 51,
ε = αM2 .
Foram encontradas as seguintes raízes: −14.829399057215626 · · · ,14.829399057215626 · · · .
Assim, o valor máximo que b atinge é 71141,76452862348 · · · .
Tomando R1 = 71141,76452862348 e R = 71142, concluimos que para h suficientemente
pequeno, o atrator está contido no conjunto AR+1 = (x,y) : a(x,y) < 71143.

Seção 2.3: Simulações e exemplos 41
Figura 2.8: Atrator, D , e AR1 descritos acima.


CAPÍTULO
3Sistemas lineares
Seja A = [bi j]m×m uma matriz complexa. A norma usual de A é definida por |A| =sup|v|6=0
|Av||v|
= sup
0<|v|<1
|Av||v|
= max
|v|=1|Av|= inf
x∈CmC : |Ax| ≤C|x|.
Dizemos que uma seqüência de matrizes Xn 7→ A se |Xn−A| 7→ 0 quando n 7→ ∞ e que Xn éuma seqüência limitada se |Xn| for limitada.
Se A = [ai j]m×m, o polinômio característico de A é Φ(λ) = det(λI−A) =m∏j=1
(λ−λ j), onde
os λi são os autovalores de A.
O conjunto σ(A) = λ1, ...,λm é o espectro de A e r(A) = maxλi∈σ(A)
|λi| é o raio espectral
de A.
A multiplicidade algébrica de λi é a multiplicidade de λi como raíz de Φ(λ), e amultiplicidade geométrica de λi é a dimensão do autoespaço x ∈ Cm : Ax = λix, isto é, onúmero de autovetores L.I. associados ao autovalor λi.
3.1 Sistemas lineares de equações de diferenças homogêneasde primeira ordemDefinição 3.1.1. A forma geral de um sistema linear de equações de diferenças homogêneo e
de dimensão m é dada por:
x1(n+1) = a11x1(n)+a12x2(n)+ ...+a1mxm(n)x2(n+1) = a21x1(n)+a22x2(n)+ ...+a2mxm(n)
......
...
xm(n+1) = am1x1(n)+am2x2(n)+ ...+ammxm(n)
(3.1)

44 Capítulo 3: Sistemas lineares
ou abreviadamente X′= AX .
Observe que como X(n + 1) = AX(n), segue por indução que as soluções do sistema (3.1)são as órbitas do sistema semidinâmico Π(n,x0) = Anx0, as quais também podem ser expressaspela seqüência (x0,Ax0,A2x0,A3x0, ...), onde x0 ∈ Rm. Portanto o problema de calcular assoluções de (3.1) se restringe ao cálculo das potências sucessivas da matriz A.
Observe que se An é uma seqüência convergente com limn→∞
An = B, então B é uma projeção,
isto é B2 = B. De fato, como An → B, temos (An)2 → B2 e por continuidade, A2n → B2. ComoA2n é subseqüência de An temos que A2n → B e assim, pela unicidade do limite, B2 = B.
3.2 Forma canônica de JordanSe A é uma matriz diagonal, isto é, A = diagλ1, ...,λ j, então An = diagλn
1, ...,λnj.
Definição 3.2.1. Uma matriz quadrada A de ordem n é dita nilpotente se existe r natural não
nulo tal que Ar = 0. O menor r com essa propriedade é chamado de índice da matriz A. Temos
n≥ r.
Exemplo 3.2.1. Um exemplo clássico de matriz nilpotente é dado pela matriz j × j cuja
primeira coluna é o vetor 0 ∈ Rm e, para 2 ≤ k ≤ j, sua k-ésima coluna é ek−1 =(0, ...,0,1,0, ...,0), o (k-1)-ésimo elemento da base canônica de Rm. Por exemplo, para j =
4, temos:
E =
0 1 0 00 0 1 00 0 0 10 0 0 0
, E2 =
0 0 1 00 0 0 10 0 0 00 0 0 0
, E3 =
0 0 0 10 0 0 00 0 0 00 0 0 0
, E4 =
0 0 0 00 0 0 00 0 0 00 0 0 0
.
O próximo teorema pode ser interpretado como uma generalização da fórmula de De Moivrepara os números complexos (Veja Lima, [20]).
Teorema 3.2.1. (Decomposição polar)Seja E um espaço vetorial de dimensão finita munido de produto interno. Todo operador
linear A : E →E admite uma decomposição da forma A = PU, onde U : E →E é ortogonal e P :E → E é auto-adjunto não negativo (isto é, todos os seus autovalores são reais não negativos).
No caso em que A é inversível, P e U são univocamente determinados, além disso, P =√
AA∗
e U = P−1A.
Exemplo 3.2.2. Como aplicação do Teorema da decomposição polar, vamos calcular as
potências de J(α,β) =
[α β
−β α
].

Seção 3.2: Forma canônica de Jordan 45
Aplicando o teorema anterior, temos[
α β
−β α
]=
[ρ 00 ρ
][cos(θ) sen(θ)−sen(θ) cos(θ)
], onde ρ =√
α2 +β2, cos(θ) = α
ρe sen(θ) = β
ρ, e por indução:[
α β
−β α
]n
=
[ρ 00 ρ
]n[cos(θ) sen(θ)−sen(θ) cos(θ)
]n
=
[ρn 00 ρn
][cos(nθ) sen(nθ)−sen(nθ) cos(nθ)
].
O cálculo das potências de uma matriz pode ser simplificado com o seguinte resultado deálgebra linear.
Teorema 3.2.2 (Forma Canônica de Jordan).
a) Caso real: Seja A uma matriz real.
Existe uma matriz real C não singular, tal que J = C−1AC = diagJ1, ...,Jk, cada Ji é
da forma J(λ) = λId +E (E como no exemplo 3.2.1), ou J(α,β) como no exemplo 3.2.2,
onde λ é um autovalor real de A e α + iβ é um autovalor complexo não real de A. A
soma das ordens dos blocos de Jordan da forma J(λ) é igual a multiplicidade de λ como
raiz do polinômio característico de A (multiplicidade algébrica de λ) e a quantidade dos
blocos J(λ) é igual a dimensão do autoespaço associado ao autovalor λ (multiplicidade
geométrica de λ); a soma das ordens dos blocos de Jordan da forma J(α,β) é igual ao
dobro da multiplicidade de α + iβ (ou α− iβ) como raíz do polinômio característico de
A. A matriz J chama-se Forma canônica real de A e é única, salvo a ordem dos blocos e o
sinal da parte imaginária β das raízes complexas de A. Duas matrizes reais são similares
se e somente se elas têm a mesma forma de Jordan real.
b) Caso complexo: Seja A uma matriz complexa.
Existe uma matriz complexa C, não singular, tal que J = C−1AC = diagJ1, ...,Jk =N + D,onde D é uma matriz diagonal e N é uma matriz nilpotente tais que DN = ND,
cada Qi é da forma J(λ) = λId + E, onde λ é um autovalor complexo de A. A soma
das ordens dos blocos de Jordan da forma J(λ) é igual a multiplicidade de λ como raiz
do polinômio característico de A e a quantidade desses blocos é igual a multiplicidade
geométrica de α + iβ. A matriz J chama-se Forma canônica complexa de A e é única,
salvo a ordem dos blocos. Duas matrizes complexas são similares se e somente se elas
têm a mesma forma de Jordan complexa.
Se uma matriz A = diagJ1, ...,Jk está na forma de Jordan, então An = diagJn1 , ...,Jn
k . SeA e B são similares com A = C−1BC, então An = C−1BnC. Se λi é um autovalor de A e J(λi) éum bloco de Jordan, então temos:

46 Capítulo 3: Sistemas lineares
Jni =
λ0 1 0 0 · · · 0 00 λ0 1 0 · · · 0 00 0 λ0 1 · · · 0 00 0 0 λ0 · · · 0 0...
......
.... . .
......
0 0 0 0 · · · λ0 10 0 0 0 · · · 0 λ0
n
=
λn0 nλ
n−10
(n2
)λ
n−20 · · ·
(n
r−1
)λ
n−r0
0 λn0 nλ
n−10 · · ·
(n
r−2
)λ
n−r+10
0 0 λn0 · · ·
(n
r−3
)λ
n−r+20
......
.... . .
...0 0 0 · · · λn
0
, (3.2)
An é a matriz solução do sistema, dita matriz de solução principal, e as suas colunas sãosoluções de (3.1) ditas soluções principais. De fato, se x j(n) é a j-ésima coluna de An e x j(n+1)é a j-ésima coluna de An+1, temos que x j(n+1) = Ax j(n).
Além disso, se x j é uma coluna de An, então x j é a solução de (3.1) satisfazendo x j(0) = e j,onde e j é o j-ésimo vetor da base canônica de Rm. Isso segue do fato que A0 = Id.
Proposição 3.2.1. O conjunto ϕ de todas as soluções x : N×Rm 7→ Rm de (3.1) é um espaço
vetorial sobre R de dimensão m, e as soluções principais constituem uma base para esse espaço
vetorial.
Prova:
É claro que a seqüência nula é solução de (3.1).
Se ϕ e ψ são soluções de (3.1), então ϕ′= Aϕ e ψ
′= Aψ.
Se a, b são constantes arbitrárias, então (aϕ)′= aϕ
′= aAϕ = Aaϕ = A(aϕ) e (bψ)
′= bψ
′=
bAψ = Abψ = A(bψ).
Logo, se γ = aϕ+bψ, γ′= (aϕ+bψ)
′= (aϕ)
′+(bψ)
′= aϕ
′+bψ
′= aAϕ+bAψ = Aaϕ+
Abψ = A(aϕ+bψ) = Aγ.
Com isso fica provado que o conjunto das soluções de (3.1) é um espaço vetorial.
Já foi visto que se x j(n) é a j-ésima coluna de An, então x j é a solução de (3.1) tal quex j(0) = e j, com isso temos que que o conjunto x1(n), ...,xm(n) constituído pelas colunas deAn é linearmente independente, resta apenas mostrar que ele é um conjunto gerador do espaçovetorial das soluções de (3.1), e com isso conclui-se que a dimensão desse espaço vetorial é m.
Seja ϕ a solução de (3.1) tal que ϕ(0) =
a1...
am
.
Temos que ϕ(0) = a1x1(0)+ ...+ amxm(0), e por indução, ϕ(n) = a1x1(n)+ ...+ amxm(n)

Seção 3.2: Forma canônica de Jordan 47
para todo n natural. Isso mostra que qualquer solução de (3.1) é combinação linear das soluçõesprincipais desse sistema e a prova está concluída.
Note que se 〈v1, · · ·vm〉 é uma base de autovetores de A associados aos autovalores λ1, · · · ,λm
respectivamente, então a solução geral de (3.1) é dada por x(n) = a1λn1v1 + · · ·+amλn
mvm.
Proposição 3.2.2. A estabilidade assintótica da origem (com relação a 3.1) é sempre global e
são equivalentes:
1. An → 0 quando n→ ∞.
2. Todas as soluções se aproximam da origem quando n→∞, isto é, a origem é globalmente
atrativa.
3. A origem é globalmente assintoticamente estável.
4. Todos os autovalores λ de A satisfazem |λ|< 1, isto é, r(A) < 1.
Prova:
1. ⇒ 2.
Como as soluções de (3.1) são da forma (v,Av,A2v,A3v, ...) e An → 0, seque que toda soluçãose aproxima da origem quando n→ ∞.
2. ⇒ 3.
Considere Rm com a norma da soma, isto é, se x = (x1, · · · ,xm) ∈ Rm então |x|=m∑
i=1|xi|.
Como Anx → 0 para todo x ∈ Rm, em particular temos que Anei → 0, onde ei é o i-ésimovetor da base canônica de Rm. Segue que existe N tal que |Anei| ≤ 1 para todo n ≥ N e existeMi tal que |Anei| ≤Mi para todo n ∈ N, onde Mi = max
1≤n<N1, |Anei|.
Seja M = max1≤i≤m
Mi.
Seja x = (x1, · · · ,xm) tal que |x| ≤ 1. Como x =m∑
i=1xiei, temos |Anx| = |
m∑
i=1xiAnei| ≤
m∑
i=1|xiAnei|=
m∑
i=1|xi||Anei| ≤M
m∑
i=1|xi|= M|x| ≤M.
Assim, provamos que se |x| ≤ 1, então Anx ≤M para todo n ∈ N.Agora vamos verificar a estabilidade assintótica da origem. Dado varepsilon > 0 e tomando
δ = ε
M , então se |x|< δ, |x|δ
< 1 e disso segue que |An xδ| ≤M, donde obtemos que |Anx| ≤Mδ < ε.
3. ⇒ 4.
Suponha que existe um autovalor λ de A tal que |λ| ≥ 1, e seja v é um autovetorcorrespondente a λ com |v| = 1 temos: |Anv| = |λnv| = |λn||v| = |λ|n ≥ 1. Isso mostra queAn 9 0 quando n→ ∞.

48 Capítulo 3: Sistemas lineares
4. ⇒ 1.
Para provar essa implicação, faremos uso do Teorema de Holmes (Veja Gabriel [8]):
Teorema 3.2.3 (Holmes).Seja (X , | . |) um espaço de Banach. Dados A ∈ L(X) e ε > 0, existe uma norma || . ||ε
equivalente a | . |, tal que r(A)≤ || A ||ε ≤ r(A)+ ε.
Como por hipótese r(A) < 1, dado ε > 0 tal que r(A)+ε < 1, pelo Teorema de Holmes existe|| . ||ε tal que || A ||ε ≤ r(A)+ ε < 1 (Lembre que todas as normas em Rm são equivalentes).
Assim, || An ||ε ≤ || A ||nε → 0 quando n→ ∞.
Se a matriz A cumpre uma das condições da Proposição 3.2.2 (e portanto cumpre todas)então ela é dita estável.
r(A) ≤ 1 é uma condição necessária para que A seja estável, mas essa condição não ésuficiente como mostra o seguinte exemplo:
Exemplo 3.2.3. Considere o sistemax′1 = x2
x′2 = −x1 + x2
, ou abreviadamente X′= AX, onde A =
[0 1−1 2
].
O polinômio característico de A é p(x) = x2 − 2x + 1 = (x− 1)2, donde r(A) = 1, mas
An =
[−n+1 n
−n n+1
]. Logo An 9 0 quando n→ ∞ e portanto A não é estável.
3.3 Critério de Schur-CohnNessa seção apresentaremos um critério de Schur-Cohn que é um algoritmo computacional
que decide se uma dada matriz é estável ou não. (Para uma referência, veja Henrici, [14], vejatambém LaSalle, [18]).
Definição 3.3.1. Os internos de uma matriz quadrada são a própria matriz e as matrizes obtidas
desta, eliminando-se sucessivamente a primeira e última linha e a primeira e última coluna.
Para a matriz [A]5×5, A =
a11 a12 a13 a14 a15
a21 a22 a23 a24 a25
a31 a32 a33 a34 a35
a41 a42 a43 a44 a45
a51 a52 a53 a54 a55
, os internos de A são a própria
matriz A,
a22 a23 a24
a32 a33 a34
a42 a43 a44
e[
a33
].

Seção 3.4: Um funcional de Liapunov para X′= AX 49
Para a matriz [A]6×6, A =
a11 a12 a13 a14 a15 a16
a21 a22 a23 a24 a25 a26
a31 a32 a33 a34 a35 a36
a41 a42 a43 a44 a45 a46
a51 a52 a53 a54 a55 a56
a61 a62 a63 a64 a65 a66
, os internos de A são a própria
matriz A,
a22 a23 a24 a25
a32 a33 a34 a35
a42 a43 a44 a45
a52 a53 a54 a55
e
[a33 a34
a43 a44
].
Proposição 3.3.1. (Critério de Schur-Cohn)
Uma condição necessária e suficiente para que um polinômio p(x) = amxm + am−1xm−1 +...+a0 de coeficientes reais tenha todas as raízes contidas em B1(0) é:
a) p(1) > 0 e (−1)m p(−1) > 0.
b) As matrizes seguintes têm internos positivos
M± =
am 0 0 · · · 0 0am−1 am 0 · · · 0 0am−2 am−1 am · · · 0 0
......
... . . . ......
a3 a4 a5 · · · am 0a2 a3 a4 · · · am−1 am
±
0 0 · · · 0 0 a0
0 0 · · · 0 a0 a1
0 0 · · · a0 a1 a2...
... . . . ......
...
0 a0 · · · am−5 am−4 am−3
a0 a1 · · · am−4 am−3 am−2
3.4 Um funcional de Liapunov para X′= AX
Nesta seção vamos nos restringir as matrizes reais.
Definição 3.4.1. Os menores principais de uma matriz quadrada A de ordem n são as matrizes
Ak :=
a11 · · · a1k
......
ak1 · · · akk
, k = 1, · · · , n.
Definição 3.4.2. Uma matriz quadrada real A de ordem m é definida positiva se a forma
quadrática V (x) = xtAx =m∑
i, j=1ai jxix j for definida positiva.

50 Capítulo 3: Sistemas lineares
Como V (x) = 12xt(A + At)x, segue que A é definida positiva se e somente se A + At , (que é
uma matriz simétrica) também o for. Desta observação conclui-se que é suficiente trabalharmoscom matrizes simétricas.
Uma das razões para trabalharmos com matrizes simétricas é o:
Proposição 3.4.1 (Critério de Silvester).Uma matriz simétrica real A é definida positiva se e somente se os determinantes dos seus
menores principais são positivos, isto é, se e somente se
a11 > 0,
∣∣∣∣∣ a11 a12
a21 a22
∣∣∣∣∣> 0,
∣∣∣∣∣∣∣a11 a12 a13
a21 a22 a23
a31 a32 a33
∣∣∣∣∣∣∣> 0, ..., det(A) > 0.
Uma prova desse resultado pode ser encontrada em Hoffman & Kunze, [16].O critério de silvester não é válido se retirarmos a hipótese da matriz A ser simétrica, por
exemplo, se A =
[1 0−4 1
], então V (x,y) = xtAx = x2−4xy+ y2.
Agora utilizaremos o método direto de Liapunov para obter uma caracterização das matrizesestáveis. Retornando a equação (3.1) e considerando um funcional da forma V (x) = xtBx, ondeB é definida positiva, temos V (x) = V (T (x))−V (x) = V (Ax)−V (x) = (Ax)tB(Ax)− xtBx =xtAtBAx− xtBx = xt(AtBA−B)x.
Se AtBA−B é definida negativa, pelo teorema de estabilidade assintótica de Liapunov, aorigem é assintóticamente estável. Reciprocamente, suponha A estável e considere a equação
AtBA−B =−C, (3.3)
onde C é uma matriz dada. Se essa equação tem uma solução, então (At)k+1BAk+1−(At)kBAk =−(At)kCAk.
Somando as parcelas para k variando entre 0 e n, temos (At)n+1BAn+1−B =−n∑
k=0(At)kCAk.
Tomando n → ∞ obtemos B =∞
∑k=0
(At)kCAk, esta série é convergente pois como A é uma
matriz estável, então r(At) = r(A) < 1, assim existe ε > 0 tal que r(At)+ ε = r(A)+ ε < 1, epelo Teorema de Holmes concluimos que existe || ||ε equivalente a | | tal que r(A) < ||A||ε <
r(A)+ ε < 1 e r(At) < ||At ||ε < r(At)+ ε < 1. Logo:
||B||ε = ||∞
∑k=0
(At)kCAk||ε ≤∞
∑k=0
||(At)kCAk||ε ≤∞
∑k=0
||(At)k||ε||C||ε||Ak||ε ≤∞
∑k=0
||At ||kε||C||ε||A||kε ≤∞
∑k=0
||C||ε(r2)k < ∞, onde r = max||A||ε, ||At ||ε < 1. Assim, a
série acima converge na norma original, e de fato B é uma solução de (3.3).

Seção 3.4: Um funcional de Liapunov para X′= AX 51
Teorema 3.4.1 (Liapunov).Se existem matrizes B e C positivas definidas satisfazendo (3.3), então A é estável.
Reciprocamente, Se A é uma matriz estável, então dada uma matriz C a equação (3.3) tem
uma única solução; se C é definida positiva então B também é; e se C é simétrica então B
também é simétrica.
Corolário 3.4.1. Se r(A) ≥ 1 e a equação (3.3) tem uma solução B para alguma matriz C
definida positiva, então ou B é semidefinida negativa ou B é indefinida, isto é, xtBx é negativo
para algum x.
Consideraremos agora a questão da unicidade da solução da equação 3.3, mais geralmente,considere a equação
A1XA2−X = C, (3.4)
onde A1 é uma matriz m×m, A2 é uma matriz n×n , X e C são matrizes m×n.
Proposição 3.4.2. A equação (3.4) tem uma única solução se e somente se nenhum autovalor
de A1 é inverso multiplicativo de um autovalor de A2.
Prova:
A condição “a equação (3.4) tem uma única solução” é equivalente a “A1XA2 = X implicaque X = 0”.
Assuma então que essa condição em A1 e A2 é satisfeita. Da igualdade A1XA2 = X segueque X = A1XA2 = A2
1XA22 = A3
1XA32 = · · · e que A j
1X = Ak1XAk− j
2 para k ≥ j ≥ 0.
Defina os polinômios p(λ) =k∑j=0
a jλj e p∗(λ) =
k∑j=0
a jλk− j = λk p( 1
λ).
Seja φi o polinômio característico de Ai. Como φ1(λ) e φ∗2(λ) são relativamente primospois nenhum autovalor de A1 é inverso multiplicativo de um autovalor de A2, pelo algoritmo deEuclides existem polinômios p(λ) e q(λ) tais que p(λ)φ1(λ)+q(λ)φ∗2(λ) = 1.
Definindo φ(λ) = q(λ)φ∗2(λ) e notando que φ∗(λ) = q∗(λ)φ2(λ), pelo teorema de Cayley-Hamilton temos φ∗(A2) = 0 e φ(A1) = Id, segue que A1XA2 = X implica X = 0.
Para provar a recíproca, assuma que λ é um autovalor de A1 e λ−1 é um autovalor de A2 (ede At
2 também). Sejam xt1 = (u1, · · · ,um)t e xt
2 = (v1, · · · ,vn)t com x1 6= 0 e x2 6= 0 e tais queA1x1 = λx1 e At
2 = λ−1x2.
Definindo X :=
u1v1 · · · u1vn
... . . . ...umv1 · · · umvn
Temos que X 6= 0 e A1XA2 = X .

52 Capítulo 3: Sistemas lineares
Se A é estável, então nenhum recíproco multiplicativo de um autovalor de A é um autovalorde A, e esta proposição fornece uma forma de mostrar que a equação (3.4) tem uma únicasolução B para cada C se A é estável.
3.5 Estabilidade por aproximação linearNesta seção determinaremos a estabilidade da equação não linear
x′= Ax+ f (x), (3.5)
onde f (x) é o(x) quando |x| → 0, isto é, f (x) é tal que dado ε > 0 existe um δ > 0 tal que| f (x)|< ε|x| para todo |x|< δ.
Teorema 3.5.1. Assuma que f (x) é o(x) quando |x| → 0. Se A é uma matriz estável, então
a origem é um ponto de equilíbrio assintoticamente estável para (3.5). Se r(A) > 1, então a
origem é um ponto de equilíbrio instável para (3.5).
Prova:
assuma A estável e C = Id. Temos que a equação (3.3) tem uma solução B que é (simétricae) definida positiva. Então se V (x) = xtBx, temos que
V (x) = V (T (x))−V (x) =
V (Ax+ f (x))−V (x) =
(Ax+ f (x))tB(Ax+ f (x))− xtBx =
(xtAt + f (x)t)B(Ax+ f (x))− xtBx =
xtAtBAx+ xtAtB f (x)+ f (x)tBAx+ f (x)tB f (x)− xtBx =
xt(AtBA−B)x+ xtAtB f (x)+ f (x)tBAx+ f (x)tB f (x) =
xt(−Id)x+ xtAtB f (x)+(xtAtB f (x))t +V ( f (x)) =
−xtx+[2xtAtB f (x)+V ( f (x))]
Temos que 2xtAtB f (x)+V ( f (x)) é o(x2) em uma vizinhança da origem, logo existe ε > 0tal que V (x) < 0 em Bε(0)−0 e V (0) = 0. Segue do Teorema de estabilidade assintótica deLiapunov que a origem é assintoticamente estável.
Se r(A) > 1, e tomando β > 0 tal que nenhum autovalor de A0 = (1 + β)12 A é autovalor de
A e suficientemente pequeno que r(A0) > 1; (temos (1+β)−12 < r(A)).
Então pela proposição 3.4.2 e pelo corolário 3.4.1, existe uma matriz B satisfazendo

Seção 3.6: Equações de diferenças lineares de ordem m 53
At0BA0−B =−Id ⇒
((1+β)−12 A)tB((1+β)−
12 A)−B =−Id ⇒
(1+β)−1AtBA−B =−Id ⇒AtBA− (1+β)B =−(1+β))Id ⇒
AtBA−B = βB− (1+β)Id,
onde V (x) =−xtBx toma valores positivos para algum x. Temos (com relação a 3.5):
V (x) =−(Ax+ f (x))tB(Ax+ f (x))+ xtBx =−(xtAt + f (x)t)(BAx+B f (x))+ xtBx =
−xtAt(BAx+B f (x))− f (x)t(BAx+B f (x))+ xtBx =−xtAtBAx− xtAtB f (x)− f (x)tBAx− f (x)tB f (x)+ xtBx =
xt(−AtBA+B)x− xtAtB f (x)− (xtAtBt f (x))t + f (x)tB f (x) =xt(−AtBA+B)x− xtAtB f (x)− (xtAtB f (x))t + f (x)tB f (x) =
xt(−βB+(1+β)Id)x−2xtAtB f (x)+V ( f (x)) =−βxtBx+ xt(1+β)x−2xtAtB f (x)+V ( f (x)) =
βV (x)+ xt(1+β)x+2xtAtB f (x)+V ( f (x))
Temos que 2xtAtB f (x)+V ( f (x)) é o(x2) numa vizinhança da origem. Logo, para algum0 < α < 1 e δ suficientemente pequeno, W (x) = xt(1+β)x+2xtAtB f (x)+V ( f (x))≥ αxtx paratodo |x|< δ. Pela proposição 2.1.6, temos que a origem é instável para 3.5.
3.6 Equações de diferenças lineares de ordem mUma equação da forma
x(m) +am−1x(m−1) + ...+a2x′′+a1x
′+a0x = 0 (3.6)
chama-se equação de diferenças linear homogênea de ordem m.
Observação 3.6.1. A equação (3.6) é equivalente ao sistema:
x
x′
x′′
...
xm−2
xm−1
′
=
0 1 0 0 · · · 00 0 1 0 · · · 00 0 0 1 · · · 0...
......
... . . . ...
0 0 0 0 · · · 1−a0 −a1 −a2 −a3 · · · −am−1
︸ ︷︷ ︸
A
x
x′
x′′
...
xm−2
xm−1
︸ ︷︷ ︸
X
, (3.7)
Ou abreviadamente X′= AX.

54 Capítulo 3: Sistemas lineares
O vetor X(n) é o estado de (3.6) no tempo n−m+1.
Se x(n) é uma solução de (3.7) então y(n) = x1(n) é uma solução de (3.6). Reciprocamente,
se y(n) é solução de (3.6), então
y(n)y′(n)
y′′(n)...
ym−2(n)ym−1(n)
é solução de (3.7).
A matriz A0 é dita matriz compnheira principal de A0.
Proposição 3.6.1. O conjunto ϕ de todas as soluções de (3.6) é um espaço vetorial sobre Rcuja dimensão é igual a ordem dessa equação (m).
Prova:
A prova dessa proposição segue da Proposição 3.2.1 e da observação 3.6.1.
3.7 Soluções de uma equação de m-ésima ordemProcuraremos inicialmente soluções da forma λn com n ∈ N (Se λ = 0, convencionaremos
que 00 = 1) para (3.6).
am(λn)(m) +am−1(λn)(m−1) + ...+a2(λn)′′+a1(λn)
′+a0(λn) =
amλn+m +am−1λn+m−1 + ...+a2λn+2 +a1λn+1 +a0λn =
λn(amλm +am−1λm−1 + ...+a2λ2 +a1λ+a0)
Assim, (λn) é uma solução de (3.6) se e somente se λ é raíz de amxm + am−1xm−1 + ...+a2x2 + a1x + a0 = 0. Este polinômio é denominado equação caraceterística, ou polinômiocaracterístico de (3.6).
Se toda solução de (3.6) é da forma x(n) = c1λn1 + ...+ cmλn
m e é unicamente determinadapelas condições iniciais y(0) = b1, y(1) = b2, ..., y(m−1) = bm. Temos então o seguinte sistemalinear:
c1 + c2 + ... + cm = b1
c1λ1 + c2λ2 + ... + cmλm = b2
c1λ21 + c2λ2
2 + ... + cmλ2m = b3
......
...c1λ
m−11 + c2λ
m−12 + ... + cmλm−1
m = bm
.

Seção 3.8: Fórmula da variação das constantes 55
Assim, ∆(λ1, ...,λm) =
∣∣∣∣∣∣∣∣∣∣∣∣∣
1 1 ... 1λ1 λ2 ... λm
λ21 λ2
2 ... λ2m
...... . . . ...
λm−11 λ
m−12 ... λm−1
m
∣∣∣∣∣∣∣∣∣∣∣∣∣6= 0.
∆(λ1, ...,λm) é um determinante de Vandermonde; verifica-se que ∆(λ1, ...,λm) =
∏1≤i≤ j≤m
(λ j − λi). Disso segue que se a equação característica de (3.6): amxm + am−1xm−1 +
...+a2x2 +a1x+a0 = (x−λ1)(x−λ2)...(x−λm), onde λi 6= λ j se i 6= j, então a solução geralde (3.6) é y(n) = c1λn
1 +c2λn2 + ...+cmλn
m, e reciprocamente, se a solução geral de (3.6) é dessaforma, então os λi são distintos.
No caso de raízes múltiplas, isto é, se xm +am−1xm−1 + ...+a2x2 +a1x+a0 = (x−λ1)s1(x−
λ2)s2...(x− λr)sr , então(
nj
)λ
n− ji , onde 0 ≤ j ≤ si− 1 e 1 ≤ i ≤ r, constituem uma base de
soluções para (3.6).
Exemplo 3.7.1 (Seqüência de Fibonacci).
Considere o PVI
y′′− y
′− y = 0y(0) = 0y′(0) = 1
Seu polinômio característico é x2−x−1, logo a solução geral é c1
(1+√
52
)n+c2
(1−√
52
)n
e através de alguns cálculos simples, obtemos que a solução do PVI é:
y(n) =1√5
(1+
√5
2
)n
− 1√5
(1−
√5
2
)n
3.8 Fórmula da variação das constantesProposição 3.8.1 (Princípio da superposição).
Se x1(n) e x2(n) satisfazem x′1 = Ax1 + f1(n) e x
′2 = Ax2 + f2(n), então x(n) = c1x1(n)+
c2x2(n) é solução de x′= Ax1 + c1 f1(n)+ c2 f2(n).
Do princípio da superposição, temos que se x1(n) e x2(n) são soluções de x′= Ax + f (n)
então x1(n)− x2(n) é solução da equação homogênea x′= Ax, assim, se x1(n) é uma solução
de x′= Ax + f (n) então a solução geral de x
′= Ax + f (n) é Anv + x1(n). Noutras palavras, a
solução geral de x′= Ax+ f (n) é a solução geral de x
′= Ax adicionada a uma solução particular
de x′= Ax+ f (n).
Proposição 3.8.2 (Fórmula da variação das constantes).Via indução finita, temos que a solução de x
′= Ax+ f (n) satisfazendo x(0) = x0 é dada por
x(n) = Anx(0)+n−1∑
k=0An−k−1 f (k), ou ainda x(n) = Anx(0)+
n−1∑
k=0An f (n− k−1).

56 Capítulo 3: Sistemas lineares
3.9 Matrizes companheirasConsidere a equação de diferenças de m-ésima ordem (3.6): x(m)+am−1x(m−1)+ ...+a2x
′′+
a1x′+a0x = 0, dados y(0), y
′(0) = y(1), y
′′(0) = y(2), ..., y(m−1)(0) = y(m−1)
Definição 3.9.1. Uma matriz A0 é uma matriz companheira da equação de diferenças (3.6), se
for similar a sua matriz companheira principal.
Se A é uma matriz companheira de (3.6) então o polinômio característico de A é igual aopolinômio característico de (3.6).
Nem toda matriz é uma matriz companheira de alguma equação de diferenças de m-ésimaordem (a matriz identidade por exemplo), noutras palavras, nem todo sistema X
′= AX é
equivalente a uma equação de diferenças de m-ésima ordem.Uma condição necessária e suficiente para que um sistema X
′= AX seja equivalente a uma
equação de diferenças de m-ésima ordem é que A seja uma matriz companheira. O próximoteorema mostra algumas condições equivalentes a A ser uma matriz companheira (Veja LaSalle,[18]).
Proposição 3.9.1. São equivalentes:
1. A é uma matriz companheira.
2. dim(Im(A−λI)) = m−1 para cada λ ∈ σ(A).
3. A multiplicidade geométrica de cada autovalor de A é 1.
4. O polinômio característico de A é o polinômio minimal de A.
5. Existe um vetor b tal que b, Ab, A2b, ..., Am−1b são linearmente independentes.

CAPÍTULO
4Aplicações a sincronização
Sejam f ,g ∈ C (N×Rm×Rm×Λ,Rm). Para λ1,λ2 ∈ Λ considere o sistema acopladox′= f (n,x,y,λ1)
y′= g(n,x,y,λ2)
(4.1)
Definição 4.0.2. Dizemos que o sistema 4.1 sincroniza globalmente (ou sisplemesmente
sincroniza) se dado ε > 0 existe δ > 0 tal que se |λ2 − λ1| < δ, então para todo (x0,y0) ∈Rm×Rm temos que limsup
n→∞
|y(n,x,y,λ1,λ2)− x(n,x,y,λ1,λ2)|< ε.
Figura 4.1: Ilustração da definição 4.0.2
4.1 Aplicações ao sistema de Lorenz discretoNessa seção apresentaremos algumas simulações relativas a sincronização do sistema de
Lorenz discreto Acoplado, dado pelas equações:

58 Capítulo 4: Aplicações a sincronização
x(n+1) = x(n)+h[−ax(n)+ay(n)]y(n+1) = y(n)+h[−y(n)− r
4(x(n)+αn)− (x(n)+αn)z(n)]z(n+1) = z(n)+h[−bz(n)+(x(n)+αn)y(n)− 5
4br]u(n+1) = u(n)+h[−au(n)+av(n)]v(n+1) = v(n)+h[−v(n)− r
4(x(n)+αn)− (x(n)+αn)z(n)]w(n+1) = w(n)+h[−bw(n)+(x(n)+αn)y(n)− 5
4br]
.
Para simular esse sistema, como no exemplo 2.3.1, Tomaremos a = 10, r = 28, b = 83 e
αn = α(n) = 4cos(n). Da observação 1.4.2 segue que α(n),n ∈ N= [−4,4].
Utilizando MATLAB com a seqüência de comandos:
clear; close all; x(1) = 30; y(1) = 0; z(1) = 80; u(1) = -30; v(1)=0; w(1) = -80; h = 1/597;
for i=1:8000
x(i + 1) = x(i) + h*(-10*x(i)+10*y(i));
y(i + 1) = y(i) + h*(-y(i) - 7*(x(i) + 4*cos(i)) - (x(i) + 4*cos(i))*z(i));
z(i + 1) = z(i) + h*(-(8/3)*z(i) + (x(i) + 4*cos(i))*y(i) - 5/4*(8/3)*28);
u(i + 1) = u(i) + h*(-10*u(i) + 10*v(i));
v(i + 1) = v(i) + h*(-v(i) - 7*(x(i) + 4*cos(i)) - (x(i) + 4*cos(i))*z(i));
w(i + 1) = w(i) + h*(-(8/3)*w(i) + (x(i) + 4*cos(i))*y(i) - 5/4*(8/3)*28);
end
plot3(x,y,z,’.g’); xlabel(’x(n), u(n)’); ylabel(’y(n), v(n)’); zlabel(’z(n), w(n)’); hold on;
plot3(u,v,w,’.r’); xlabel(’x(n), u(n)’); ylabel(’y(n), v(n)’); zlabel(’z(n), w(n)’); hold on; grid;
obtivemos as seguintes imagens, que mostram o comportamento assintótico de (x(n),y(n),z(n))(verde) e u(n),v(n),w(n)) (vermelho), n ∈ N sob diferentes ângulos:

Seção 4.1: Aplicações ao sistema de Lorenz discreto 59
Figura 4.2: Simulação de (x(n),y(n),z(n)) e (u(n),v(n),w(n))
Em seguida, utilizamos a seqüência de comandos:
clear; close all;
x(1)=30; y(1)=0; z(1)=80; u(1) = -30; v(1) = 0; w(1) = -80; n(1) = 1;
r(1)=4*cos(1); s(1) = x(1) - u(1) + r(1); h=1/597;
for i=1:80
x(i+1) = x(i) + h*(-10*x(i)+10*y(i));
y(i+1) = y(i) + h*(-y(i)-7*(x(i)+4*cos(i))-(x(i)+4*cos(i))*z(i));
z(i+1) = z(i) + h*(-(8/3)*z(i)+(x(i)+4*cos(i))*y(i)-5/4*8/3*28);
u(i+1) = u(i) + h*(-10*u(i) + 10*v(i));
v(i+1) = v(i) + h*(-v(i) - 7*(x(i) + 4*cos(i)) - (x(i) + 4*cos(i))*z(i));
n(i+1) = i+1;
r(i+1) = 4*cos(i+1);
s(i+1) = x(i+1) - u(i+1) + r(i+1);
end
plot(n,r,’.r’); xlabel(’n’); ylabel(’r(n), s(n)’); hold on;
plot(n,s,’.b’); xlabel(’n’); ylabel(’r(n), s(n)’); hold on;
para plotar α(n) = 4cos(n) (vermelho) e α(n) = x(n) + α(n) − u(n) (azul). α(n) é dadecodificação (e recuperação) do sinal α(n).

60 Capítulo 4: Aplicações a sincronização
Figura 4.3:
Finalmente, simulamos a sincronização com a seqüência de comandos:
clear; close all;
x(1) = 30; y(1) = 0; z(1) = 80; u(1) = -30; v(1) = 0; w(1) = -80; n(1) = 1;
a(1)=abs(x(1) - u(1)) + abs(y(1) - v(1)) + abs(z(1) - w(1)); h = 1/597;
for i=1:1195
x(i+1) = x(i) + h*(-10*x(i) + 10*y(i));
y(i+1) = y(i) + h*(-y(i) - 7*(x(i) + 4*cos(i)) - (x(i) + 4*cos(i))*z(i));
z(i+1) = z(i) + h*(-(8/3)*z(i) + (x(i) + 4*cos(i))*y(i) - 5/4*(8/3)*28);
u(i+1) = u(i) + h*(-10*u(i) + 10*v(i));
v(i+1) = v(i) + h*(-v(i) - 7*(x(i) + 4*cos(i)) - (x(i) + 4*cos(i))*z(i));
w(i+1) = w(i) + h*(-(8/3)*w(i) + (x(i) + 4*cos(i))*y(i) - 5/4*(8/3)*28);
n(i+1) = i + 1;
a(i+1) = abs(x(i+1) - u(i+1))+abs(y(i+1) - v(i+1))+abs(z(i+1) - w(i+1));
end
plot(n,a,’.’); xlabel(’n’); ylabel(’||x(n) - u(n)|| + ||y(n) - v(n)|| + ||z(n) - w(n)||’);

Seção 4.1: Aplicações ao sistema de Lorenz discreto 61
Obtivemos o gráfico:
Figura 4.4:
Ou seja, computacionalmente obtivemos que |x(n)−u(n)|+ |y(n)−v(n)|+ |z(n)−w(n)| →0 quando n→ ∞.
Como o lado esquerdo é uma soma de três parcelas positivas, temos que |x(n)−u(n)| → 0,|y(n)− v(n)| → 0 e |z(n)−w(n)| → 0 quando n→ ∞.
Assim, |(x(n),y(n),z(n))− (u(n),v(n),w(n))| → 0 quando n → ∞, e como na definição4.0.2, temos que esses sistemas sincronizam.


Referências Bibliográficas
[1] AFRAIMOVICH, V. S.; VERICHEV, N. N.; RABINOVICH, M. I. Stochasticsynchronization of oscilations in dissipative systems. Izv. Vyssh. Uchebn. Zaved.Rdiofiz. n 9, p. 1050-1060, 1986.
[2] ALBERTO, L. F. C.; CALLIERO, T. R; MARTINS A. C. P. An invariance principlefor nonlinear discrete autonomous dynamical systems, vol 52, n 4, transactions onautomatic control. (04/ 2007).
[3] ALBERTO, L. F. C. O princípio da invariância de Lassalle estendido aplicado aoestudo de coerência de geradores e à análise de estabilidade transitória multi-"swing". 2000. Tese (doutorado em engenharia elétrica) - EESC, USP, São Carlos, 2000.
[4] BELLMAN, Richard. Introduction to matrix analysis. New York: McGRAW-HILLBOOK COMPANY, 1960.
[5] CALLIERO, Taís Ruoso. Um princípio de invariância para sistemas dinamicosdiscretos. 2005. Dissertação (mestrado em engenharia elétrica) - EESC, USP, São Carlos,2005.
[6] CONWAY, John B. Functions of one complex variable I. 2. ed. EUA: Springer, 1978.(Graduate texts in mathematics, vol 11).
[7] FOLLAND, G. F. Real Analysis - modern techniques and their applications. NewYork: John Wiley and Sons, 1984.
[8] F GABRIEL FILHO, L. R. A. Comportamento assintótico de sistemas não linearesdiscretos. 2004. Dissertação (mestrado em matemática) - ICMC, USP, São Carlos, 2004.
[9] GARCIA, Arnaldo; LEQUAIN, Y. Elementos de álgebra, Rio de Janeiro: IMPA, 2001.(Projeto Euclides).
[10] HAHN, Wolfgang. Stability of motion. Nova York: Springer, 1967.

64 Referências Bibliográficas
[11] F HALE, Jack. K. Asymptotic Behavior of dissipative sistems. EUA: AmericamMathematical Society, 1988. (MATHEMATICAL SURVEYS AND MONOGRAPHS).
[12] ______. Ordinary diferential equations. EUA: John Wiley & Sons, 1969. (pure andapplied mathematics).
[13] HARTMAN, P. Ordinary Differential Equations. J.Wiley, 1964.
[14] HENRICI, P. Applied and computational complex analysis, Vol 1. New York: Wiley,1998.
[15] HIRSCH, Morris W.; SMALE, Stephen; DEVANEY, Robert L. Differential Equations,Dynamical Systems & An Introduction to Chaos. 2. ed. EUA: Elsevier academic press,2004. (pure and applied mathematics, vol 60).
[16] HOFFMAN, Kenneth; KUNZE, Ray. Álgebra Linear. tradução de Adalberto PanobiancoBergamasco, São Paulo: EDUSP, 1970.
[17] KATOK, Anatole; HASSELBLATT, Boris. Introduction to the modern theory ofdynamical systems. 1995. (Encyclopedia of mathematics and its aplications).
[18] F LASALLE, Joseph P. The Stability and Control of Discrete Processes. Springer -Verlag, 1986. (Applied Mathematical Sciences).
[19] F ______. The Stability of Dynamical Systems. Springer - Verlag, 1986. (AppliedMathematical Sciences).
[20] LIMA, Elon Lages. Algebra Linear. Rio de Janeiro: IMPA, 1998. (Coleção Matematicauniversitária).
[21] ______. Análise no espaço Rn. Rio de Janeiro: IMPA, 2004. (Coleção Matematicauniversitária).
[22] ______. Curso de análise volume. 1. 11. ed. Rio de Janeiro: IMPA, 2004. (ProjetoEuclides).
[23] ______. Curso de análise volume. 2. 8. ed. Rio de Janeiro: IMPA, 2005. (ProjetoEuclides).
[24] ______. Espaços métricos. Rio de Janeiro: IMPA, . (Coleção Matematica universitária).
[25] LORENZ, E. N. Irregularity: a fundamental propertie of the atmosphere, Tellus, vol.36A, p 98 - 110, 1984.

Referências Bibliográficas 65
[26] MUNKRES, James R. Topology, a first course. 2. ed. EUA: Prentice Hall, 2000.
[27] OTT, E.; SAUER, T.; YORKE, J. A. Coping with chaos: analysis of chaotic data andthe exploitation of chaotic systems. EUA: John Wiley & Sons, 1994.
[28] PALIS JUNIOR. J.; MELO. W. Introdução aos sistemas dinâmicos. Rio de Janeiro:IMPA, 1977. (Projeto Euclides).
[29] ROBINSON, Clark. DYNAMICAL SYSTEMS Stability, Symbolic Dynamics, andChaos. 2. ed. Florida: CRC Pres LLC, 1998.
[30] RODRIGUES, H. M.; GAMEIRO, Marcio F. Aplications of Robust Synchronization toComunication Systems, vol 79, p. 21-45 Aplicable Analysis.
[31] F RODRIGUES, H. M.; WU, Jianhong; GABRIEL FILHO, L. R. A. UniformDissipativeness and Robust Syncrhonization of Parametrized Discrete Systems:Location of the Atractor, vol 79, p. 21-45 Aplicable Analysis.
[32] RODRIGUES, H. M.; ALBERTO L. F. C., BRETAS N. G. On the invarianceprinciple: Generalizations and Applications to Synchronizations, Journal ofDiferential Equations 169, 228-254 (2000)
[33] RUDIN, Walter. Principles of mathematical analysis. New York: MacGraw-Hill, 1976.
[34] SOTOMAYOR, Jorge. Licões de equacões diferenciais ordinárias. Rio de Janeiro:IMPA, 1979. (Projeto Euclides).

Índice Remissivo
Aρ, 24
Bρ, 24
J(α,β), 44
J(λ), 45
M±, 49
Per(T ), 10
Per(T,k), 10
∆(λ1, ...,λm), 55
Λ, 24
Ω(H), 15
Π, 6
V (x), 20
V (x,n,λ), 24
x, 5
γ(x), 8
γ+(x), 8
γ−(x), 8
S1, 15
C , 24
ω(x), 12
ρ(x,S), 15
σ(A), 43
diagλ1, ...,λ j, 44
o(x), 52
r(A), 43
x′, 5
Atrator local, 19
Autovalores, 43
Conjunto
ω-limite, 12
estável, 19
globalmente assint. estável, 19instável, 19invariante, 6invariantemente conexo, 9localmente assint. estável, 19localmente atrativo, 19negativamente invariante, 6positivamente invariante, 6uniformemente assint. estável, 19
Critériode Schur-Cohn, 49de Silvester, 50
Derivada discreta, 20Determinante de Vandermonde, 55
Equaçãode diferenças, 5, 53
Espectro, 43
Fórmula da variação das constantes, 55Forma Canônica de Jordan, 45Função
de Liapunov, 20, 49de Liapunov generalizada, 24definida positiva, 20o(x), 52
Indicede uma matriz nilpotente, 44
Lorenz, 28, 57
Matrizcompanheira, 56companheira principal, 54

Índice Remissivo 67
definida positiva, 49estável, 48internos de uma, 48Menores principais de uma, 49
Multiplicidadealgébrica, 43geométrica, 43
Norma de uma matriz, 43
Orbitacompleta, 8negativa, 8periódica, 10positiva, 8
Período, 10Polinômio característico, 43, 54ponto de equilíbrio
assintoticamente estável, 20estável, 20instável, 20
Ponto fixo, 10Ponto periódico, 10Princípio
da superposição, 55de invariância, 21
Problema de valor inicial, 5Prolongamento, 8
maximal, 8
Raio espectral, 43
Sincronismo, 57Sistema
de equações de diferenças, 43dinâmico, 6semidinâmico, 6
Soluçãoperiódica, 10
Teoremada decomposição polar, 44de estabilidade assintótica, 22de estabilidade de Liapunov, 20de Holmes, 48do Ponto fixo de Banach, 12do ponto fixo de Brower, 12