Embed Size (px)
Citation preview

Angela Nieckele – PUC-Rio
DIFUSÃO
1

Angela Nieckele – PUC-Rio
2
0e
wxx dxSqqwe
Dx
qw qe
W w P e E
dxw dxe

Angela Nieckele – PUC-Rio
33
Perfil Linear: Segundo perfil mais simples. Note
que o perfil linear é a solução exata da equação de
condução uni-dimensional, regime permanente,
sem fonte, com propriedades constantes
Possíveis Perfis para avaliar o fluxo
Perfil em Degrau: Perfil mais simples possível,
porém, a inclinação de dT/dx nas faces do volume
de controle não está definida. O perfil em degrau
pode ser utilizado em outros termos, se desejado.

Angela Nieckele – PUC-Rio
4
Os fluxos de calor através das faces e e w podem ser
baseados na solução exata do caso particular do
problema (condução, regime permanente, 1D,
propriedades constantes e sem fonte), que é um perfil
linear e são
w
WPw
wx
x
TTk
dx
dTkq
w d
e
PEe
ex
x
TTk
dx
dTkq
e d

Angela Nieckele – PUC-Rio
5
Angela Nieckele – PUC-Rio
6
Sp <=0
Angela Nieckele – PUC-Rio
7
Substituindo as expressões aproximadas para os fluxos e
fonte média em

Angela Nieckele – PUC-Rio
8
Note que a forma da equação de discretização depende do perfil
utilizado para aproximar os fluxos.
Existe uma infinidade de possíveis perfis interpoladores. No entanto, a
escolha do perfil deve ser tal que atenda a 4 princípios básicos, de forma
a garantir uma solução fisicamente realista.

Angela Nieckele – PUC-Rio
9

Angela Nieckele – PUC-Rio
10

Angela Nieckele – PUC-Rio
11

Angela Nieckele – PUC-Rio
12
Angela Nieckele – PUC-Rio
13

Angela Nieckele – PUC-Rio
14
Note que estes coeficientes respeitam as 4 regras básicas
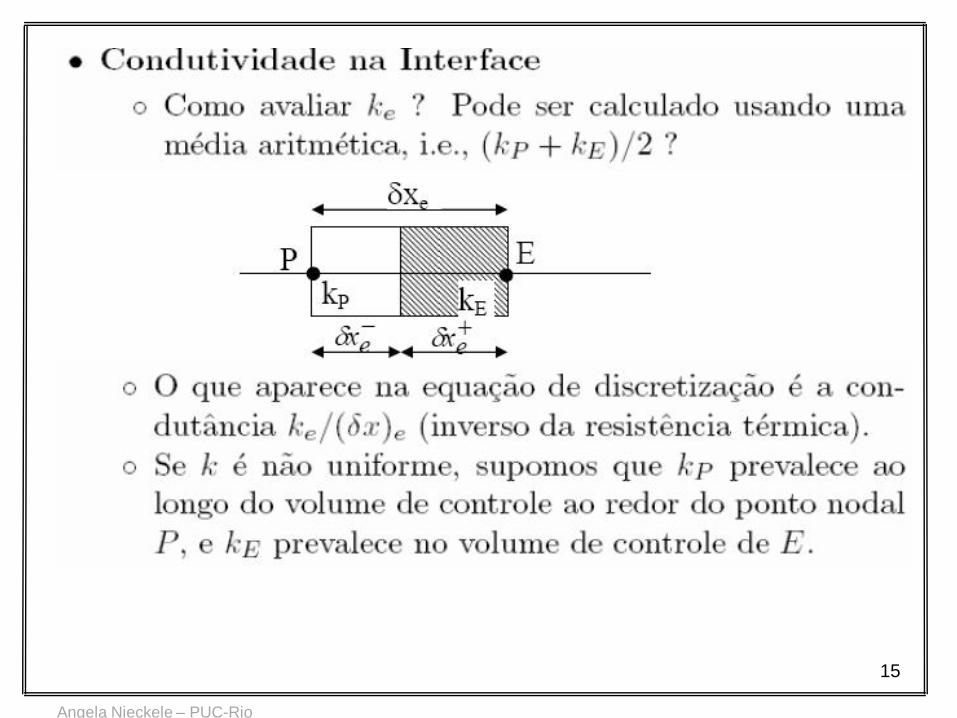
Precisamos definir:
Como obter a condutância nas faces?
Como linearizar a fonte?
Para finalizar a discretização:
Angela Nieckele – PUC-Rio
15

Angela Nieckele – PUC-Rio
16

Angela Nieckele – PUC-Rio
17

Angela Nieckele – PUC-Rio
18

Angela Nieckele – PUC-Rio
19

Angela Nieckele – PUC-Rio
20

Angela Nieckele – PUC-Rio
21
Quando existe uma expressão analítica para S, é conveniente
utilizar uma expansão em Série de Taylor no processo de
linearização, isto é
)( **
*
d
SdSS
onde * é o valor de na iteração anterior.
**
*
d
SdScSc
*
d
SdSp

Angela Nieckele – PUC-Rio
22
Exemplo: S = 4 - 5 T3,
(a) Avaliar a fonte de forma totalmente explícita,
SC = 4 - 5 T*3 SP = 0
não é conveniente, pois não antecipa nenhuma
dependência entre a fonte e a variável dependente, no
caso a temperatura.
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
0 0.2 0.4 0.6 0.8 1
Sa
S=4-5T^3
S
S*
Angela Nieckele – PUC-Rio
23
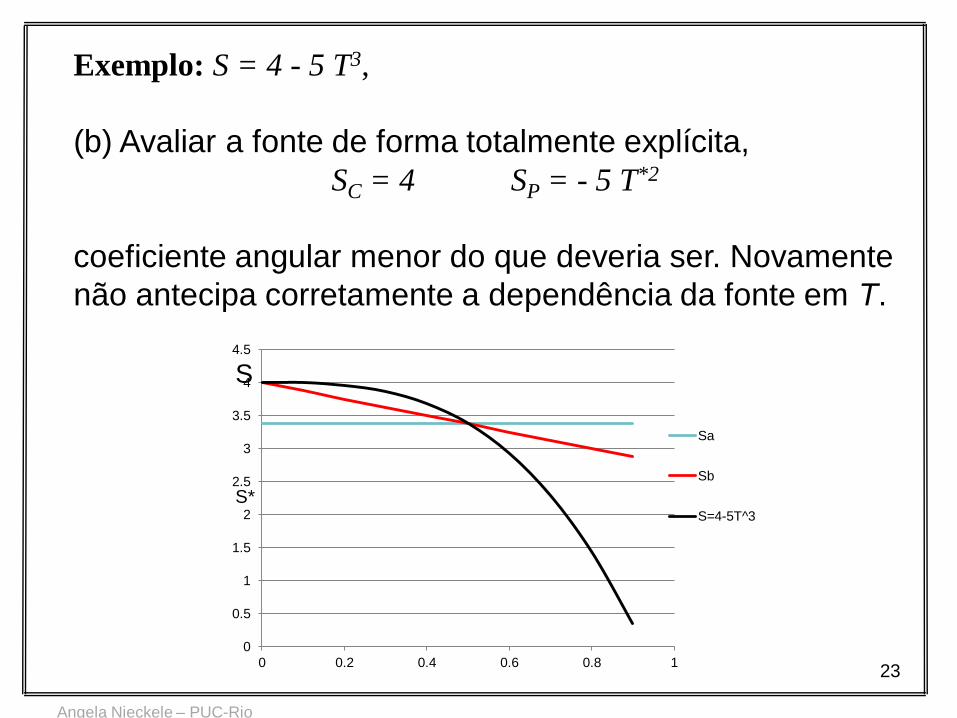
Exemplo: S = 4 - 5 T3,
(b) Avaliar a fonte de forma totalmente explícita,
SC = 4 SP = - 5 T*2
coeficiente angular menor do que deveria ser. Novamente
não antecipa corretamente a dependência da fonte em T.
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
0 0.2 0.4 0.6 0.8 1
Sa
Sb
S=4-5T^3
S
S*

Angela Nieckele – PUC-Rio
24
Exemplo: S = 4 - 5 T3,
(c) Avaliar a fonte de forma totalmente explícita,
SC = 4 +20 T*3 SP = - 25 T*2
coeficiente angular maior do que deveria ser. Diminui a
velocidade de convergência.
0
1
2
3
4
5
6
7
0 0.2 0.4 0.6 0.8 1
Sa
Sb
Sc
S=4-5T^3
S
S*

Angela Nieckele – PUC-Rio
25
Exemplo: S = 4 - 5 T3,
(d) Linearização baseada em série de Taylor. É a
tangente a curva. É a linearização correta, pois
apresenta a tendência correta da curva
dS/dT = - 15 T2 então
rearrumando
resultando em
)(15)54( *2*3* TTTTS
TTTS )15()104( 2*3*
)104( 3*TSC
)(*215 TS p
0
1
2
3
4
5
6
7
0 0.2 0.4 0.6 0.8 1
Sa
Sb
Sc
Sd
S=4-5T^3
S
S*
)( **
*
d
SdSS

Angela Nieckele – PUC-Rio
27
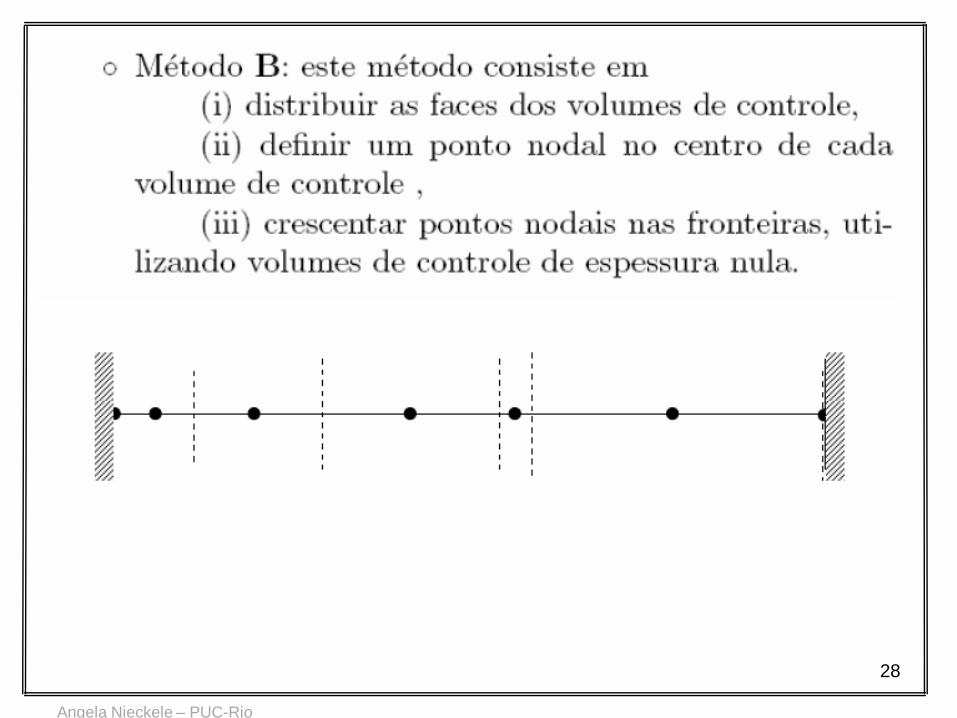
Malha
Angela Nieckele – PUC-Rio
28

Angela Nieckele – PUC-Rio
29

Angela Nieckele – PUC-Rio
30

Angela Nieckele – PUC-Rio
31
Condições de Contorno
As equações de discretização são formadas para todos os
volumes de controle ao redor dos pontos nodais internos.
Se os valores da temperatura no contorno são conhecidos, não é
necessário mais nenhuma equação.
Se Tc não é conhecido, uma equação de discretização para o
volume de controle próximo a fronteira deve ser construída. Esta
equação incorporará a informação disponível sobre o fluxo de
calor da fronteira (ou o valor do coeficiente de troca de calor
convectivo).
Angela Nieckele – PUC-Rio
32
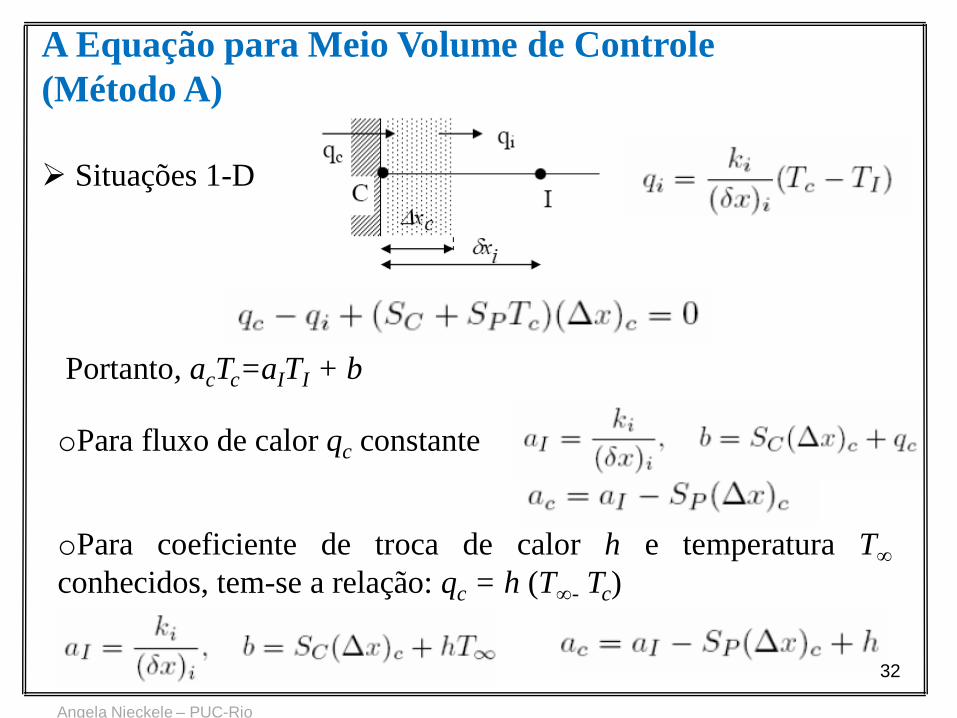
A Equação para Meio Volume de Controle
(Método A)
Situações 1-D
Portanto, acTc=aITI + b
oPara fluxo de calor qc constante
oPara coeficiente de troca de calor h e temperatura T∞conhecidos, tem-se a relação: qc = h (T∞- Tc)

Angela Nieckele – PUC-Rio
33
A Equação para Volume de Controle de Espessura
Nula (Método B)
Situações 1-D
então, acTc=aITI + b ; onde
oPara fluxo de calor qc constante
oPara h e temperatura T∞ conhecidos: qc = h (T∞- Tc)
Angela Nieckele – PUC-Rio
34
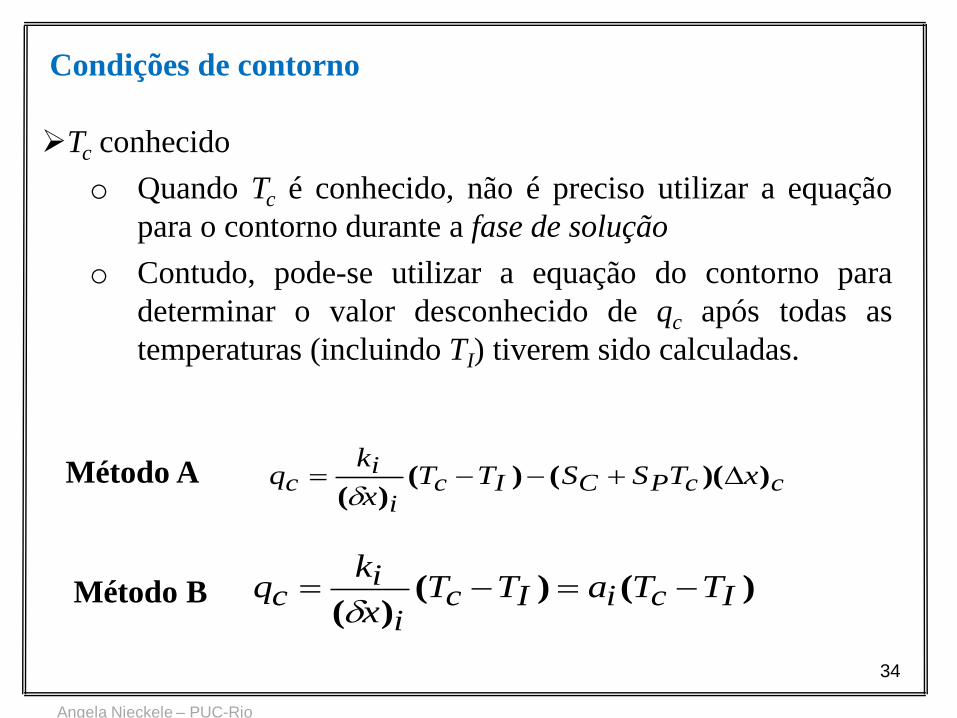
Condições de contorno
Tc conhecido
o Quando Tc é conhecido, não é preciso utilizar a equação
para o contorno durante a fase de solução
o Contudo, pode-se utilizar a equação do contorno para
determinar o valor desconhecido de qc após todas as
temperaturas (incluindo TI) tiverem sido calculadas.
ccPCIci
ic xTSSTT
x
kq ))(()(
)(D
d
)()()(
IciIci
ic TTaTT
x
kq
d
Método A
Método B

Angela Nieckele – PUC-Rio
35

Angela Nieckele – PUC-Rio
SOLUÇÃO DE SISTEMA ALGÉBRICO
TRI-DIAGONALAlgoritmo TDMA (Tri Diagonal Matrix Algorthm)
também chamado de algoritmo de Thomas
este é um algoritmo direto para resolver sistemas de equações
algébricas formado por matriz de coeficientes tri-diagonal.
Para o ponto (1) tem-se a1 1 = b1 2 + d1
Para todos os pontos 2 i N ai i = bi i+1 + ci i-1 + di
Para o ponto (N) tem-se aN N = cN N-1 + dN
A matriz resultante é
36

Angela Nieckele – PUC-Rio
37
NN
NNN
ac
bac
bac
bac
ba
000000
00000
00
0
000000
111
333
222
11
N
N
1
3
2
1
N
N
d
d
d
d
d
1
3
2
1
=
Com esse novo conjunto,
determina-se N e fazendo
uma substituição regressiva,
todos os podem ser obtidos

Angela Nieckele – PUC-Rio
• Note que a seguinte equação é valida para todos os pontos 1 i N
ai i = bi i+1 + ci i-1 + di sendo c1= 0 e bN =0
• Vamos obter o algoritmo: suponha que desejamos obter a
relação
i = Pi i+1 + Qi
após termos obtido i-1 = Pi-1 i + Qi-1
então ai i = bi i+1 + ci [ Pi-1 i + Qi-1 ]+ di
rearrumando [ ai - ci Pi-1 ] i = bi i+1 + ci Qi-1 + di
38
1iii
i1ii1i
1iii
ii
Pca
dQc
Pca
b
1
iii
ii
Pca
bP
1
1
iii
iiii
Pca
QcdQ

Angela Nieckele – PUC-Rio
O ponto de partida é: e
Note que N = QN ; já que PN =0 pois bN = 0
O algoritmo TDMA requer um tempo de computação e espaço de
memória proporcional a somente N, e não N2 ou N3.
39
1
11
a
bP
1
11
a
dQ
1
iii
ii
Pca
bP
1
1
iii
iiii
Pca
QcdQ
iiii QP 1

Angela Nieckele – PUC-Rio
40
Solução De Sistema Algébrico Tri-Diagonal____________________________________________ 21
Procedimento TDMA
calcula-se 1
11
a
bP e
1
11
a
dQ
Usando as relações recursivas de Pi e Qi
1
iii
ii
Pca
bP
1
1
iii
iiii
Pca
QcdQ
obter P2 ; Q2 ; P3 ; Q3 ; ...; PN e QN
especificar N = QN
Usando i = Pi i+1 + Qi , obter N-1 ; N-2 ; ..... ; 2 ; 1

Angela Nieckele – PUC-Rio
NÃO LINEARIDADEA equação de discretização deve ser uma equação linear,
porque o sistema de equações algébricas será resolvido por
métodos de solução de equações lineares.
Não linearidades irão aparecer quando k depender de T ou S for
uma função não linear de T. Então, os coeficientes das equações
de discretização serão dependentes de T.
Não linearidades podem ser tratadas por um processo iterativo
de solução:
(i) supomos um valor para o campo de T,
(ii) calculamos os coeficientes,
(iii) resolvemos as equações de discretização nominalmente
lineares para obter um novo campo de T,
(iv) repetimos o processo voltando ao item (ii) até obter
convergência, isto é, ate que os valores de T não variem
significativamente entre iterações. 41

Angela Nieckele – PUC-Rio
Solução de Sistema de Equações Não-LinearMétodo de Picard:
1. Chute inicial;
2. Calcular coeficientes da matriz usando o valor atual das
incógnitas;
3. Resolver o sistema de equações e determinar o novo valor das
incógnitas;
ou
• Comparar solução atual com anterior;
• Se não convergiu, voltar para 2.
)()()()()(,,,,
003
02
01
0N
)(kAA
bA kk1
1
)()( b a a a W
kWE
kEP
kP

Angela Nieckele – PUC-Rio
Método de Newton-Raphson (de Newton)
)(
)(
)()(
tan
1
1
i
iii
i
ii
i
xf
xfxx
xfxx
xf
PROCEDIMENTO ITERATIVO
)1(
)()1(
)(
)(
)(
)0(
:Raiz1
)(
)(
do ,)( While
0
:inicial Chute
D
D
i
ii
i
i
i
xii
xxx
xf
xfx
xf
i
x
xf
xfxxfxxfxxf
xfx
xfxxfxxf
DDD
DDD
0
2
2
Dados de Entrada:
Chute inicial, tolerância , número de iterações

Angela Nieckele – PUC-Rio
0),,,,(
0),,,,(
0),,,,(
0),,,,(
321
3213
3212
3211
NN
N
N
N
xxxxf
xxxxf
xxxxf
xxxxf
Sistema a ser resolvido:
Expansão por série de Taylor até termos de primeira ordem de cada
equação:
NN
NNNNNNNN
NN
NNN
NN
NNN
xx
fx
x
fx
x
fxxxfxxxxxxf
xx
fx
x
fx
x
fxxxfxxxxxxf
xx
fx
x
fx
x
fxxxfxxxxxxf
DDDDDD
DDDDDD
DDDDDD
22
11
212211
22
2
21
1
221222112
12
2
11
1
121122111
0
0
0
),,,(),,,(
),,,(),,,(
),,,(),,,(
Método de Newton: Generalização do Método de Newton
para um sistema de equações não-
lineares

Angela Nieckele – PUC-Rio
N
N
NNNNN
N
N
N
N
N
N
xx
fx
x
fx
x
fxxxf
xx
fx
x
fx
x
fxxxf
xx
fx
x
fx
x
fxxxf
DDD
DDD
DDD
2
2
1
1
21
22
2
21
1
2212
12
2
11
1
1211
),,,(
),,,(
),,,(
fJx
f
f
f
x
x
x
x
f
x
f
x
f
x
f
x
f
x
f
x
f
x
f
x
f
f
N
x
N
J
N
NNN
N
N
1
2
1
2
1
21
2
2
2
1
2
1
2
1
1
1
D
D
D
D
D
Sistema em
Forma matricial
Matrix Jacobianaj
iij
x
fJ

Angela Nieckele – PUC-Rio
PROCEDIMENTO ITERATIVO
)(
)()(
)(
)(
,
1
1
1
0
:Raiz
1
do While
0
:inicial Chute
i
ii
i
x
ii
xxx
fJx
xf
i
x
D
D
Solução de
um sistema
linear
Convergência Quadrática
)(
)()(
)(
)(
)(
][
,
1
1
1
0
:Raiz
1
do While
0
:inicial Chute
k
kk
k
k
kk
bAJ
bA
k
D
D

Angela Nieckele – PUC-Rio
Exemplo: condução não linear
0
q
xd
Tdk
xd
d
Tbase Textk(T)
q
x
L
c.c.: x = 0 T=Tbase x = L T=Text
xqbaaax
ka
x
ka
bTaTaTa
EWPw
wW
e
eE
WWEEPP
Ddd
;;)(
;)(
),(;),( WP
WP
WPwEP
EP
EPe TTk
kk
kkkTTk
kk
kkk
22
Angela Nieckele – PUC-Rio
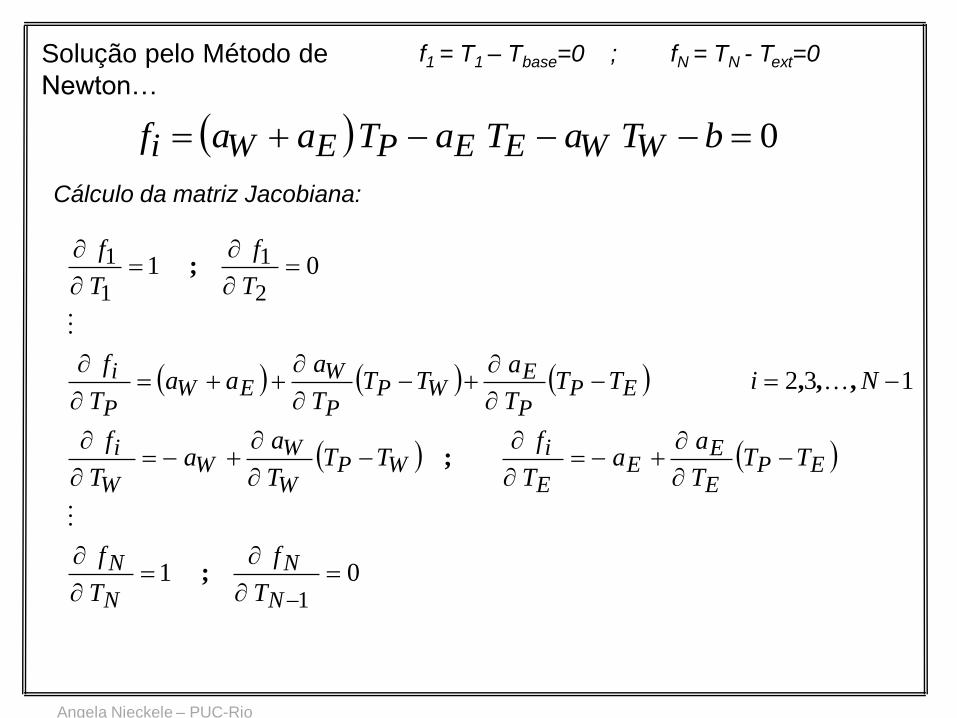
Solução pelo Método de
Newton…
Cálculo da matriz Jacobiana:
0 bTaTaTaaf WWEEPEWi
f1 = T1 – Tbase=0 ; fN = TN - Text=0
01
132
01
1
2
1
1
1
N
N
N
N
EPE
EE
E
iWP
W
WW
W
i
EPP
EWP
P
WEW
P
i
T
f
T
f
TTT
aa
T
fTT
T
aa
T
f
NiTTT
aTT
T
aaa
T
f
T
f
T
f
;
;
,,,
;

Angela Nieckele – PUC-Rio
Sistema em
Forma matricial
Matrix Jacobianaj
iij
T
fJ
fJT
f
f
f
f
T
T
T
T
T
f
T
f
T
f
T
f
T
f
T
f
f
N
i
T
N
i
J
E
i
P
i
W
i
1
2
1
2
1
3
2
2
2
1
2
100
00
00
001
D
D
D
D
D
D
Angela Nieckele – PUC-Rio
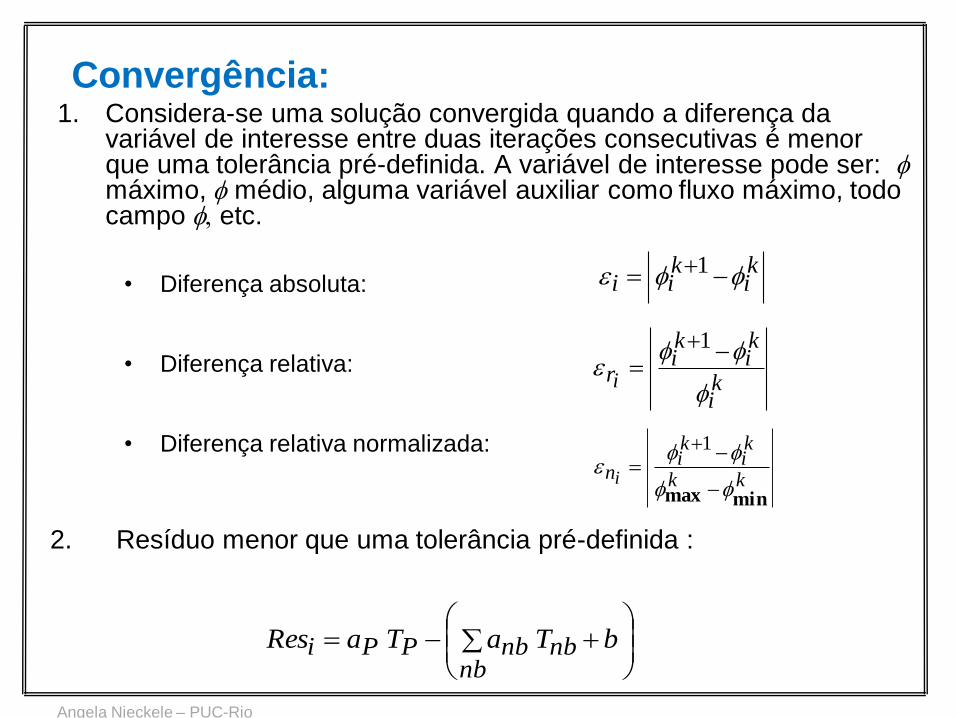
Convergência:1. Considera-se uma solução convergida quando a diferença da
variável de interesse entre duas iterações consecutivas é menor que uma tolerância pré-definida. A variável de interesse pode ser: máximo, médio, alguma variável auxiliar como fluxo máximo, todo campo , etc.
• Diferença absoluta:
• Diferença relativa:
• Diferença relativa normalizada:
ki
kii 1
ki
ki
ki
ri
1
kk
ki
ki
ni
minmax
1
bTaTaRes
nbnbnbPPi
2. Resíduo menor que uma tolerância pré-definida :

Angela Nieckele – PUC-Rio
Convergência:
toli maxmax tolirr max
maxtol
inn maxmax
tolN Ni
rr imedio
1
1 tol
N Nirr irms
1
21Norma L2 ou
Norma rms
Diferenças ou resíduo máximo:
Diferenças ou resíduo médios:
tolResRes i maxmax





























