Embed Size (px)
Citation preview
Universidade do Vale do Rio dos Sinos – UNISINOS Programa de Pós-Graduação em Engenharia Mecânica
Ajuste de equações
2
Ajuste de curvas
• Técnica usada para representar características e comportamento de sistemas térmicos.
• Dados representados por uma curva que passa próximo ou através dos pontos e a equação da curva pode ser usada para obter valores em pontos intermediários e modelar o sistema
• Conhecimento físico pode ser usado na escolha do tipo de curva empregada para o ajuste
• A equação obtida pode ser empregada:
- para representar um dado equipamento ou sistema e ser usada na simulação e otimização
- na seleção de equipamentos como sopradores, compressores e bombas
• Útil na representação de resultados de calibração e dados de propriedades
3
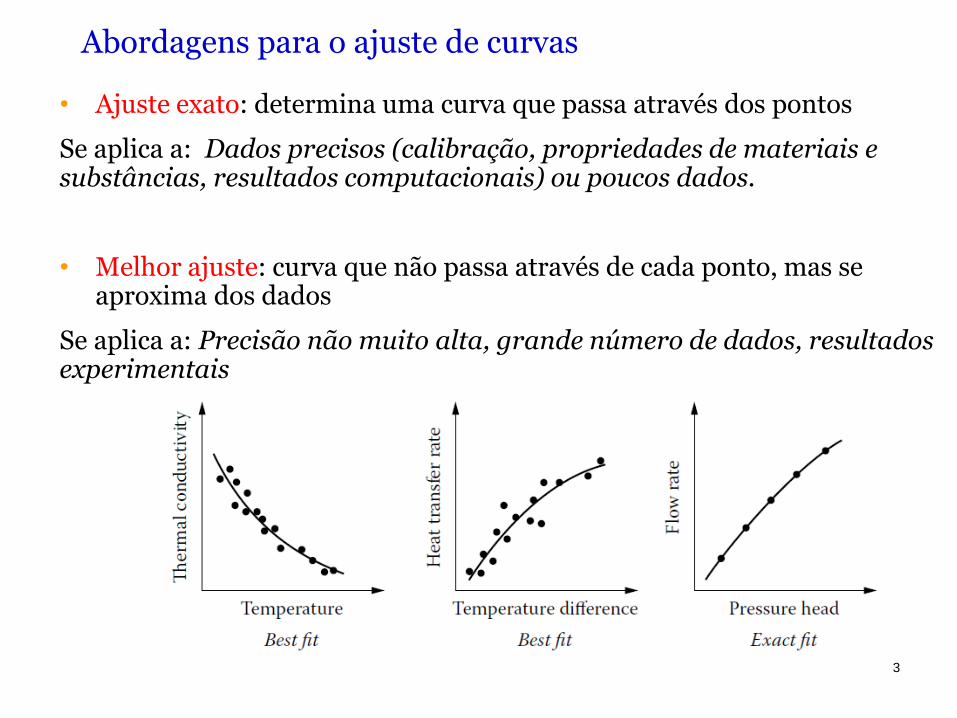
Abordagens para o ajuste de curvas
• Ajuste exato: determina uma curva que passa através dos pontos
Se aplica a: Dados precisos (calibração, propriedades de materiais e substâncias, resultados computacionais) ou poucos dados.
• Melhor ajuste: curva que não passa através de cada ponto, mas se aproxima dos dados
Se aplica a: Precisão não muito alta, grande número de dados, resultados experimentais
4
Ajuste exato 1. Polinômios:
É a forma de representação de equação mais óbvia e mais útil.
Se y deve ser representado em função de x, a forma polinomial é:
onde a0 até an são constantes determinadas pelo ajuste da curva aos dados.
O grau da equação é o maior expoente de x, no caso n.
Quando o número de dados disponíveis é precisamente o mesmo que o grau da equação mais um, n+1, o polinômio expressa exatamente esses pontos.
Quando o número de dados disponíveis exceder n+1, deverá ser buscado um polinômio que melhor ajuste esses dados.
nnxaxaxaay 2
210
5
Polinômio com uma variável e n+1 pontos:
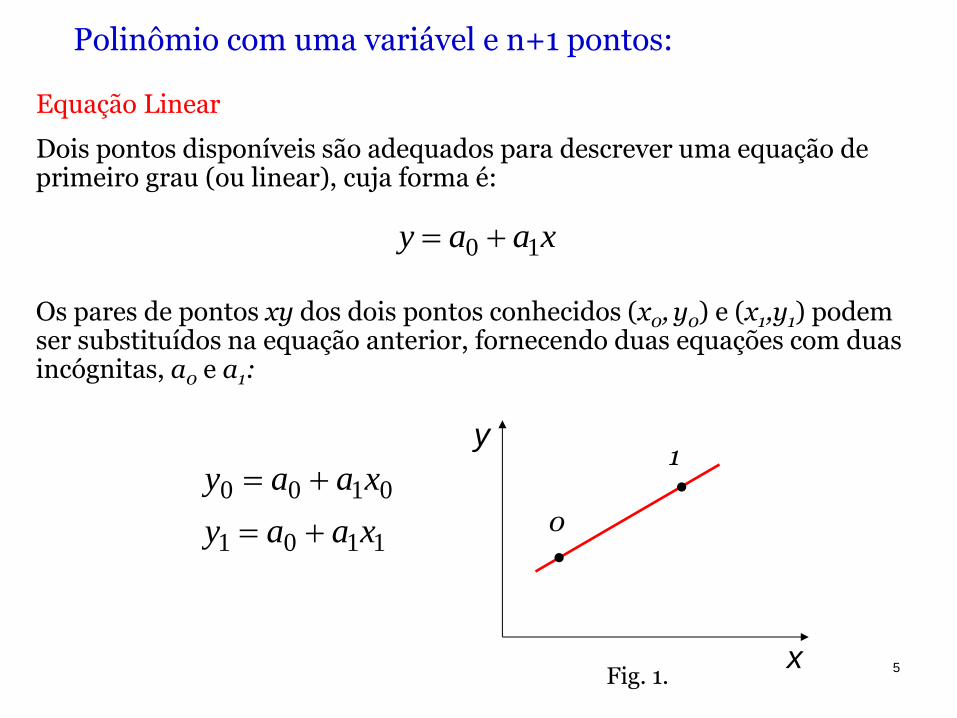
Equação Linear
Dois pontos disponíveis são adequados para descrever uma equação de primeiro grau (ou linear), cuja forma é:
Os pares de pontos xy dos dois pontos conhecidos (x0, y0) e (x1,y1) podem ser substituídos na equação anterior, fornecendo duas equações com duas incógnitas, a0 e a1:
xaay 10
1101
0100
xaay
xaay
0
1
Fig. 1. x
y
6
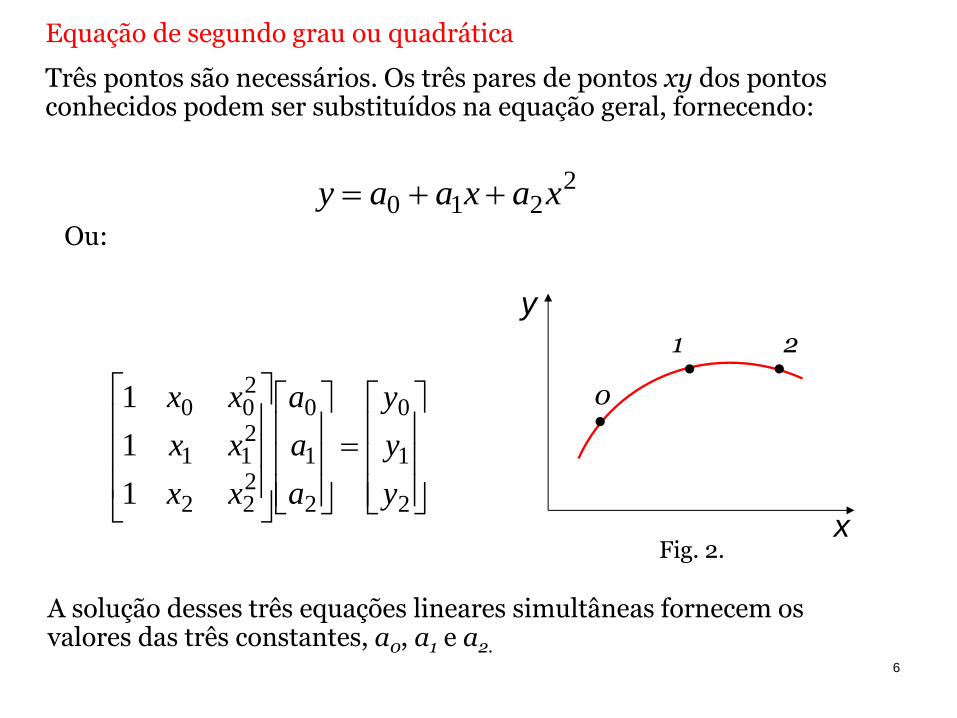
Equação de segundo grau ou quadrática
Três pontos são necessários. Os três pares de pontos xy dos pontos conhecidos podem ser substituídos na equação geral, fornecendo:
2210 xaxaay
Ou:
2
1
0
2
1
0
222
211
200
1
1
1
y
y
y
a
a
a
xx
xx
xx
A solução desses três equações lineares simultâneas fornecem os valores das três constantes, a0, a1 e a2.
Fig. 2.
0
1 2
x
y
7
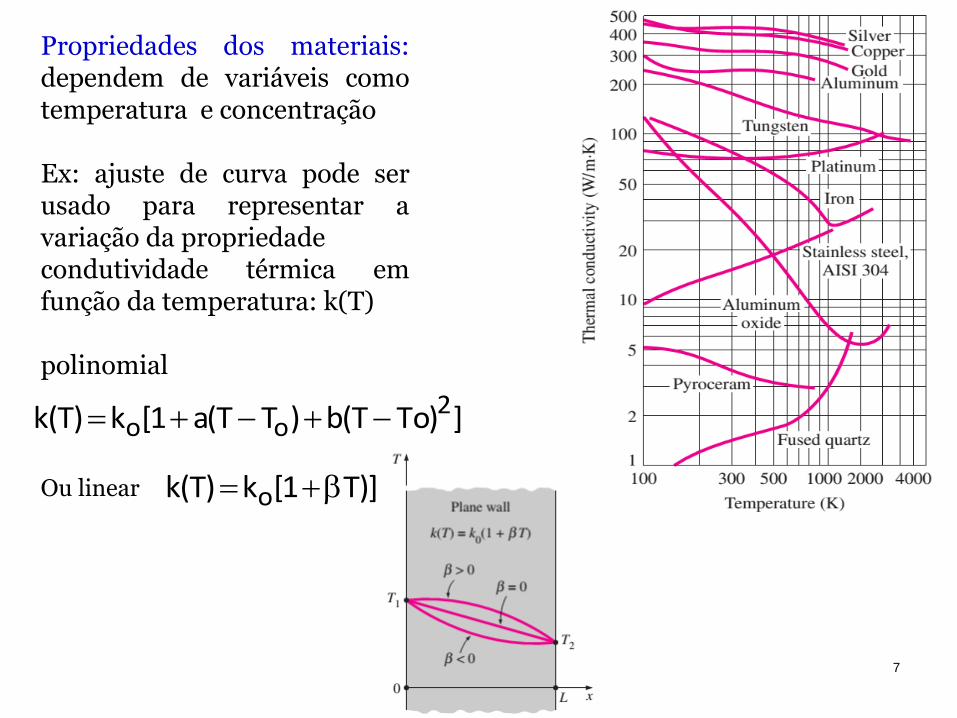
Propriedades dos materiais: dependem de variáveis como temperatura e concentração Ex: ajuste de curva pode ser usado para representar a variação da propriedade condutividade térmica em função da temperatura: k(T) polinomial Ou linear
])ToT(b)TT(a1[k)T(k 2oo
)]T1[k)T(k o
8
Os coeficientes dos termos de alta ordem em um polinômio podem ser bastante pequenos, particularmente se a variável independente for grande.
Ex: entalpia do vapor saturado h função da temperatura T
66
55
2210 TaTaTaTaah
se a faixa de T estende-se em centenas de graus, os valores de a5 e a6 podem ser muito pequenos, surgindo problemas de precisão. Uma solução para esses casos é trabalhar com uma nova variável independente, por exemplo T/100:
6
6
5
5
2
210100
Ta
100
Ta
100
Ta
100
Taah
9
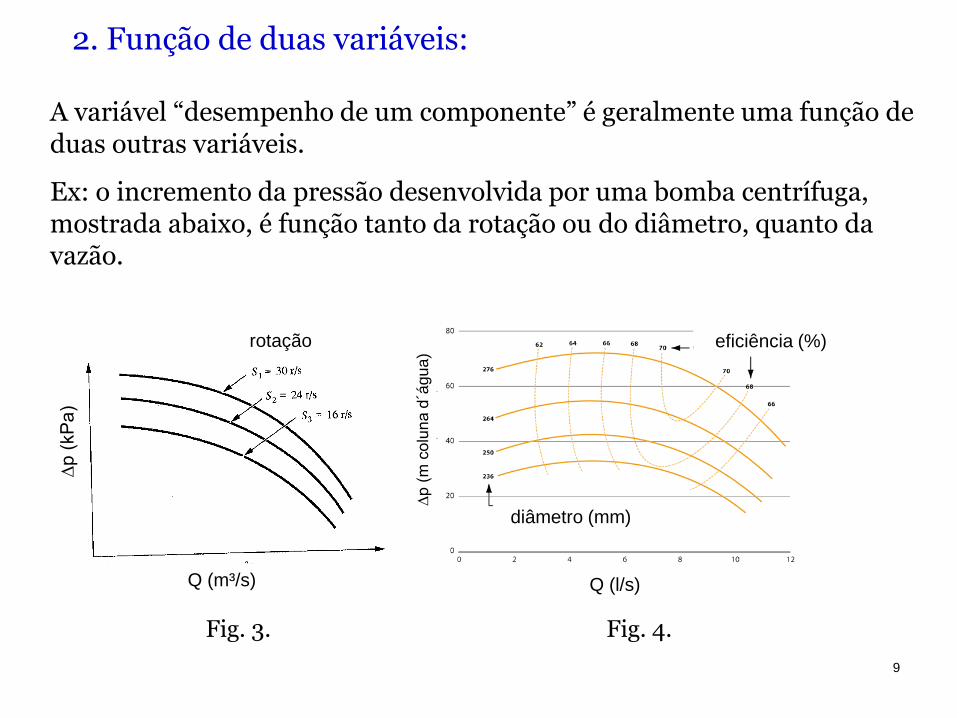
2. Função de duas variáveis:
A variável “desempenho de um componente” é geralmente uma função de duas outras variáveis.
Ex: o incremento da pressão desenvolvida por uma bomba centrífuga, mostrada abaixo, é função tanto da rotação ou do diâmetro, quanto da vazão.
Fig. 3. Fig. 4.
∆p
(kP
a)
Q (m³/s)
rotação
Q (l/s)
∆p (
m c
olu
na d
´águ
a)
diâmetro (mm)
eficiência (%)
∆p
(kP
a)
Q (m³/s)
rotação
10
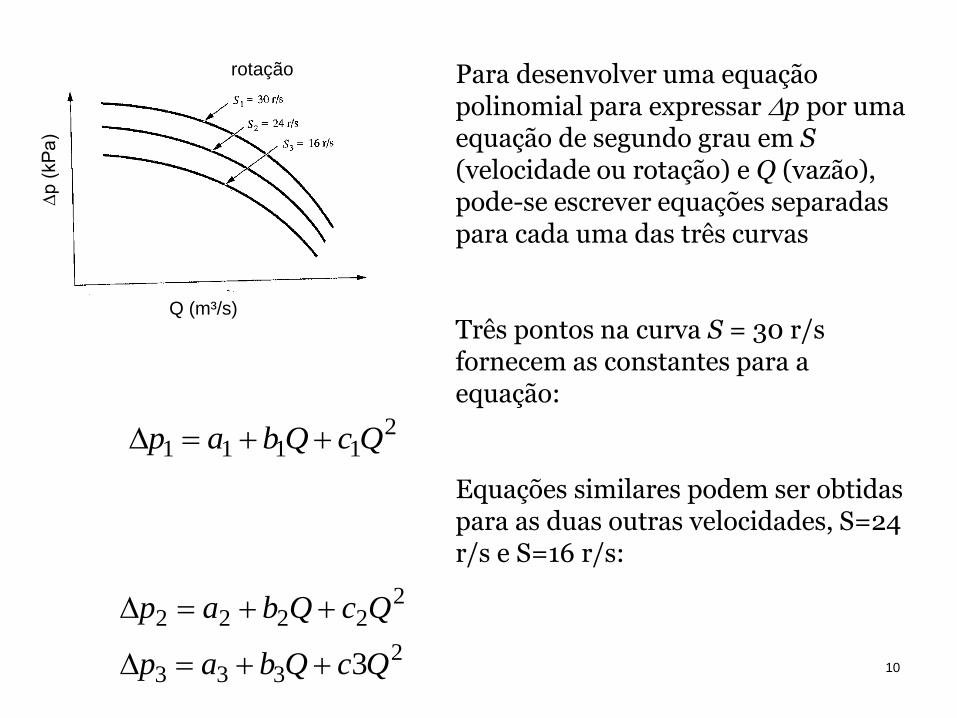
Para desenvolver uma equação polinomial para expressar p por uma equação de segundo grau em S (velocidade ou rotação) e Q (vazão), pode-se escrever equações separadas para cada uma das três curvas
Três pontos na curva S = 30 r/s fornecem as constantes para a equação:
Equações similares podem ser obtidas para as duas outras velocidades, S=24 r/s e S=16 r/s:
21111 QcQbap
2333
22222
3QcQbap
QcQbap
11
Agora, as constantes “a” podem ser representadas por uma equação de segundo grau em termos de S, usando três pares de pontos (a1, 30), (a2, 24) e (a3, 16). Essa equação teria a forma:
e similarmente para b e c:
2210 SASAAa
22210
2210
2210 QSCSCCQSBSBBSASAAp
Colocando essas constantes na forma geral da equação:
2210
2210
SCSCCc
SBSBBb
As constantes A, B e C podem ser calculadas dispondo-se de 9 pares de pontos.
12
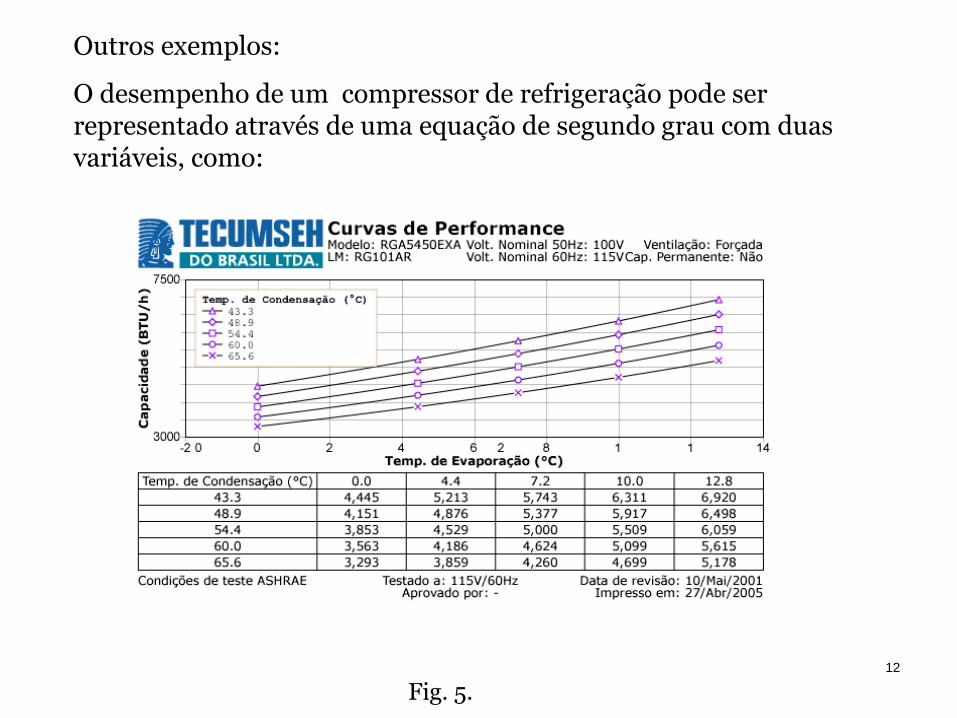
Fig. 5.
Outros exemplos:
O desempenho de um compressor de refrigeração pode ser representado através de uma equação de segundo grau com duas variáveis, como:
13
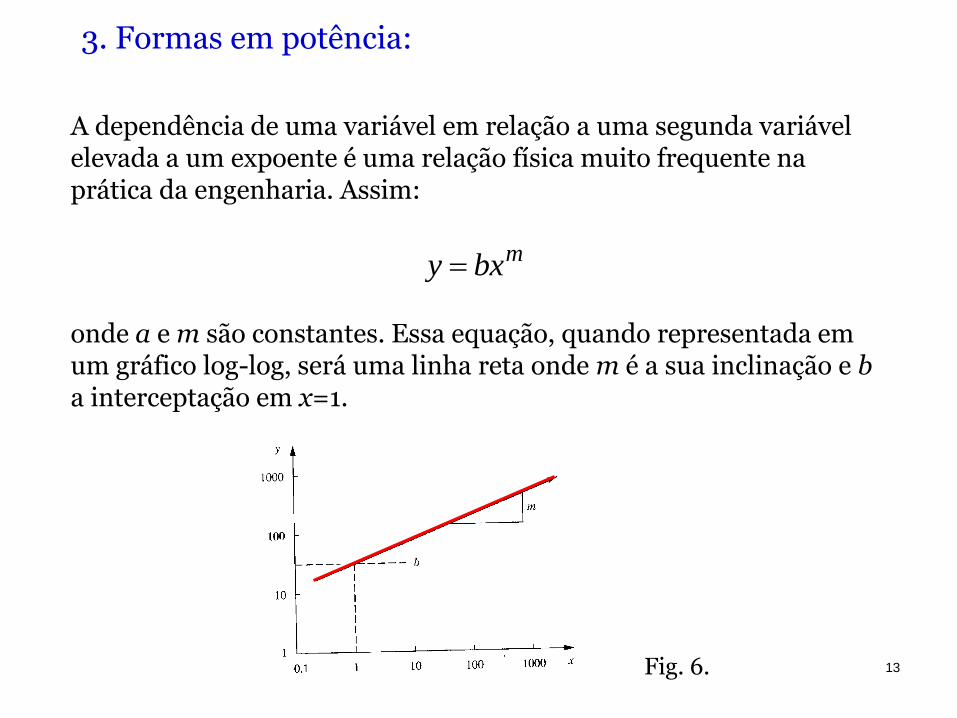
3. Formas em potência:
A dependência de uma variável em relação a uma segunda variável elevada a um expoente é uma relação física muito frequente na prática da engenharia. Assim:
onde a e m são constantes. Essa equação, quando representada em um gráfico log-log, será uma linha reta onde m é a sua inclinação e b a interceptação em x=1.
mbxy
Fig. 6.
14
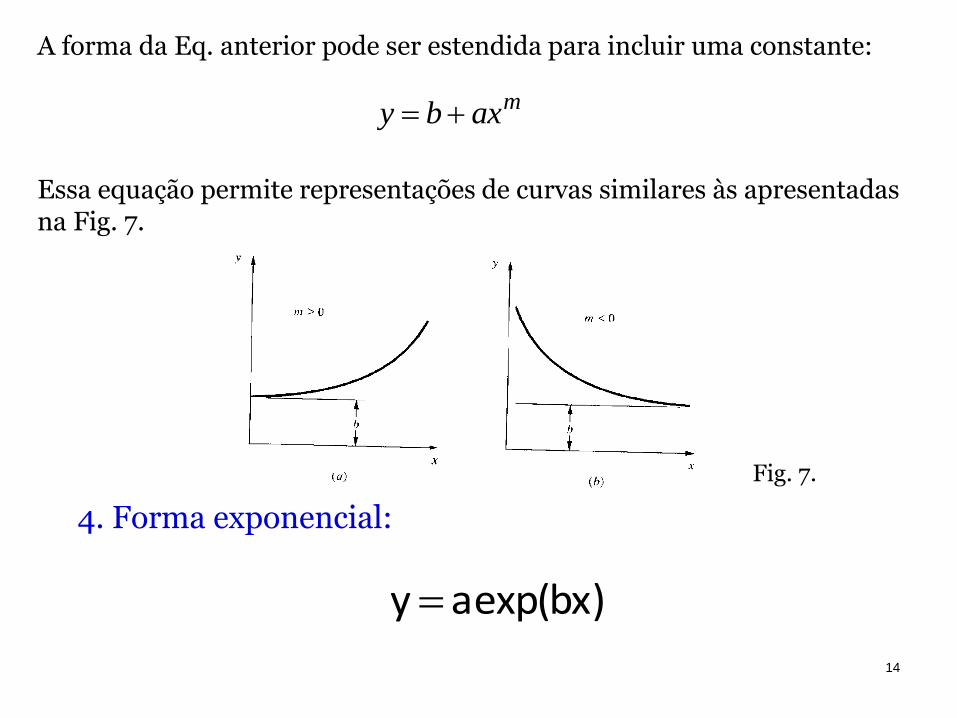
A forma da Eq. anterior pode ser estendida para incluir uma constante:
Essa equação permite representações de curvas similares às apresentadas na Fig. 7.
maxby
Fig. 7.
4. Forma exponencial:
)bxexp(ay
15
Método de solução: Método dos mínimos quadrados:
Se m coeficientes devem ser determinados em uma equação, m pontos são necessários.
Se mais que m pontos são disponíveis é possível encontrar os coeficientes que forneçam o melhor ajuste entre equação e dados.
Uma das definições de melhor ajuste é uma onde a soma dos quadrados dos desvios é mínimo.
O método em si não garante os bons resultados no ajuste das equações desejadas.
16
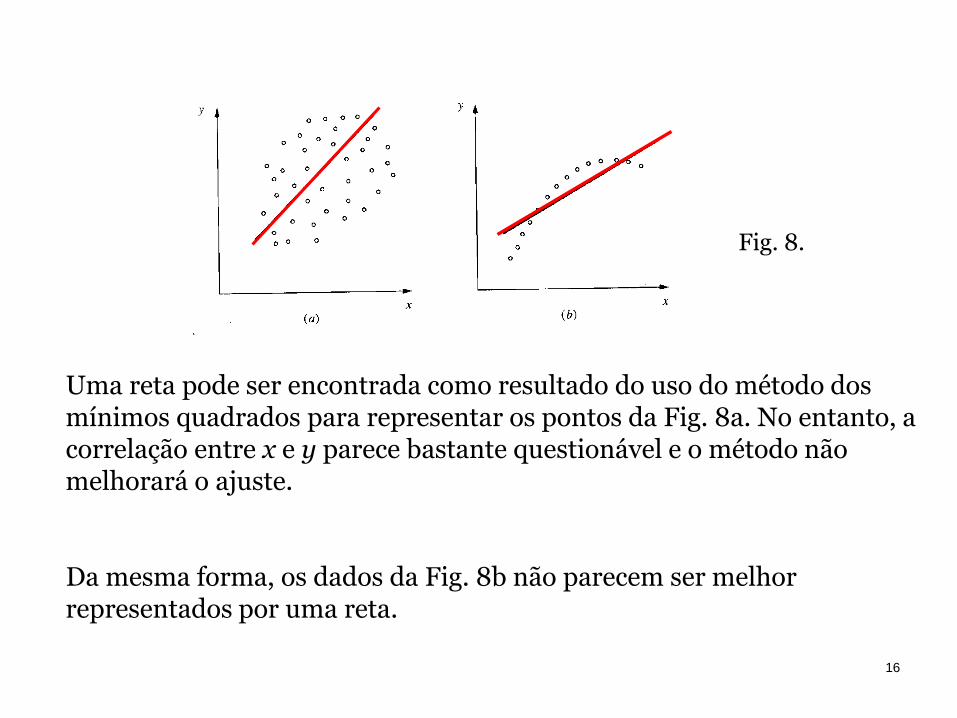
Fig. 8.
Uma reta pode ser encontrada como resultado do uso do método dos mínimos quadrados para representar os pontos da Fig. 8a. No entanto, a correlação entre x e y parece bastante questionável e o método não melhorará o ajuste.
Da mesma forma, os dados da Fig. 8b não parecem ser melhor representados por uma reta.
17
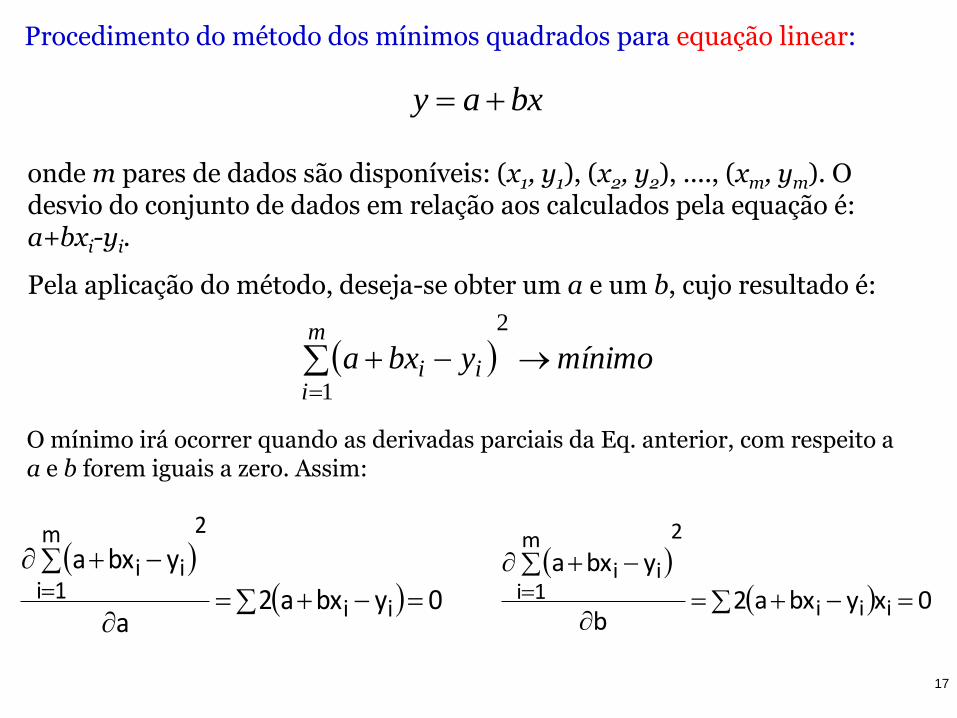
Procedimento do método dos mínimos quadrados para equação linear:
bxay
onde m pares de dados são disponíveis: (x1, y1), (x2, y2), ...., (xm, ym). O desvio do conjunto de dados em relação aos calculados pela equação é: a+bxi-yi.
Pela aplicação do método, deseja-se obter um a e um b, cujo resultado é:
mínimoybxam
iii
2
1
O mínimo irá ocorrer quando as derivadas parciais da Eq. anterior, com respeito a a e b forem iguais a zero. Assim:
0ybxa2
a
ybxa
ii
2m
1iii
0xybxa2
b
ybxa
iii
2m
1iii
18
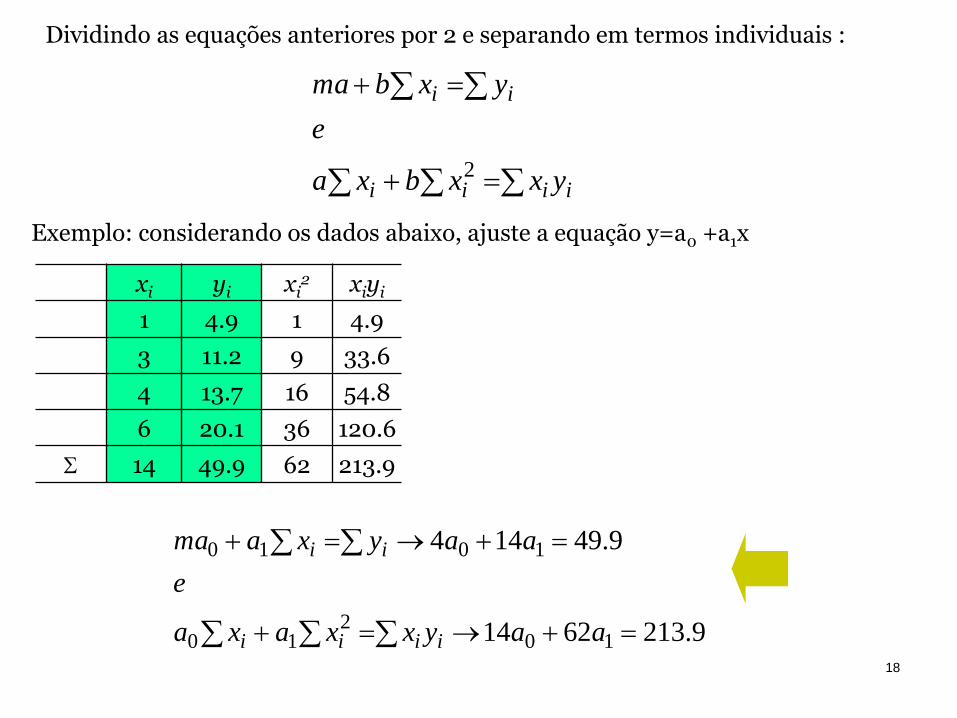
Dividindo as equações anteriores por 2 e separando em termos individuais :
iiii
ii
yxxbxa
e
yxbma
2
Exemplo: considerando os dados abaixo, ajuste a equação y=a0 +a1x
xi yi xi2 xiyi
1 4.9 1 4.9
3 11.2 9 33.6
4 13.7 16 54.8
6 20.1 36 120.6
14 49.9 62 213.9
9.2136214
9.49144
102
10
1010
aayxxaxa
e
aayxama
iiii
ii
19
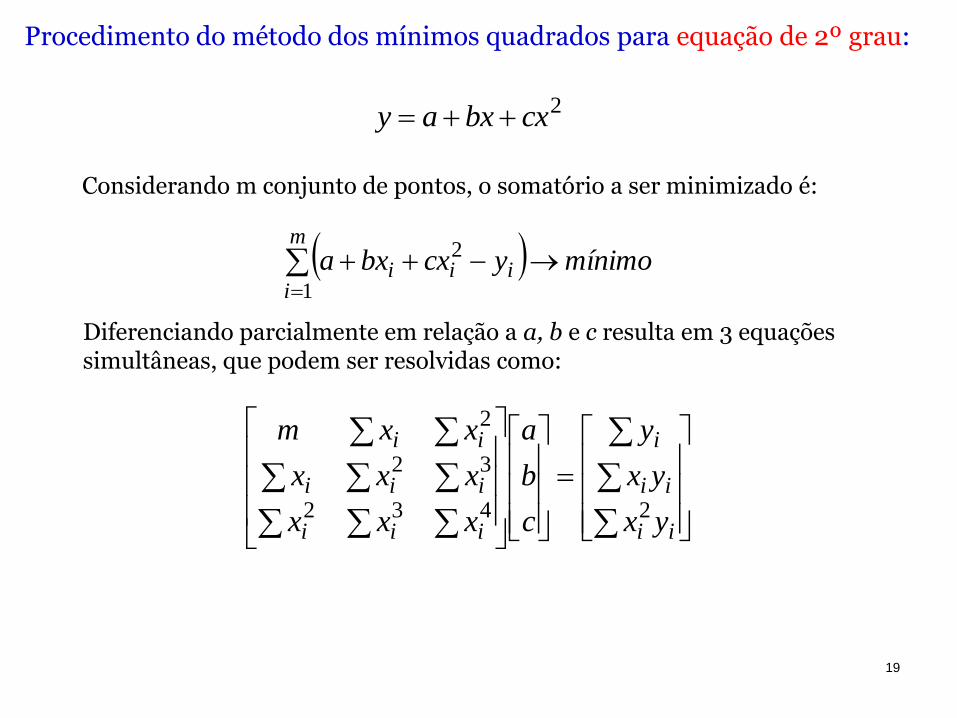
2cxbxay
Considerando m conjunto de pontos, o somatório a ser minimizado é:
mínimoycxbxam
iiii
1
2
Diferenciando parcialmente em relação a a, b e c resulta em 3 equações simultâneas, que podem ser resolvidas como:
ii
ii
i
iii
iii
ii
yx
yx
y
c
b
a
xxx
xxx
xxm
2432
32
2
Procedimento do método dos mínimos quadrados para equação de 2º grau:
20
Método dos mínimos quadrados:
O método dos mínimos quadrados pode ser aplicado para formas não polinomiais desde que contenham coeficientes constantes. Por exemplo:
2ln2sin xbxay
cuja minimização será obtida pelo somatório:
2
1
2ln2sin
m
iiii xbxay
Conforme comentado anteriormente, uma característica crucial para a aplicação do método é que os coeficientes da equação sejam constantes.
21
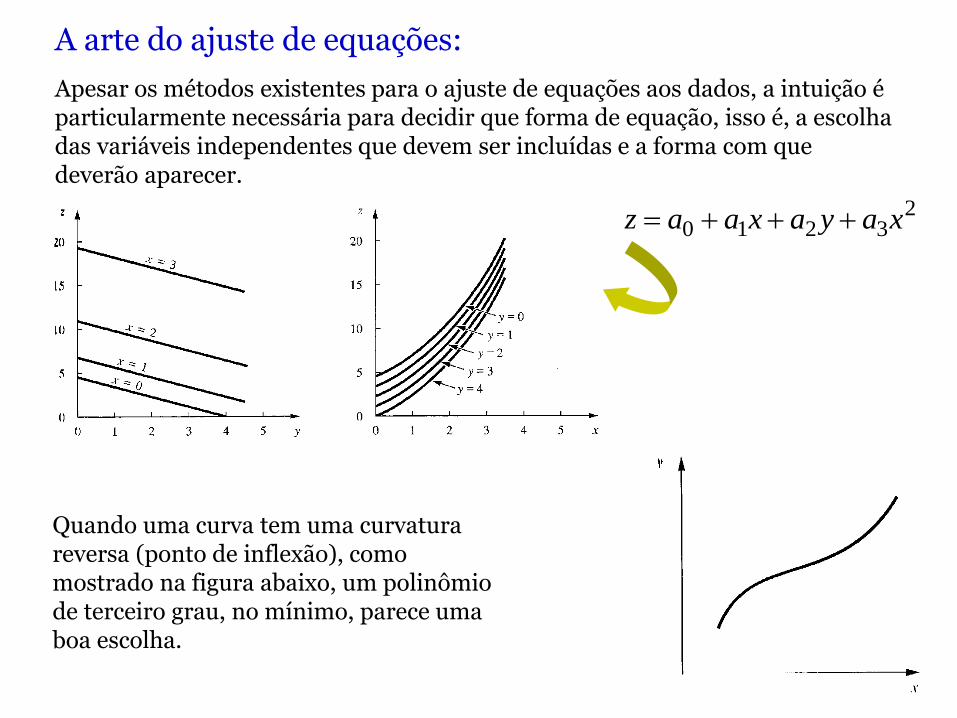
A arte do ajuste de equações:
Apesar os métodos existentes para o ajuste de equações aos dados, a intuição é particularmente necessária para decidir que forma de equação, isso é, a escolha das variáveis independentes que devem ser incluídas e a forma com que deverão aparecer.
23210 xayaxaaz
Quando uma curva tem uma curvatura reversa (ponto de inflexão), como mostrado na figura abaixo, um polinômio de terceiro grau, no mínimo, parece uma boa escolha.





























