Embed Size (px)
Citation preview

FACULDADE DE ENGENHARIA DA UNIVERSIDADE DO PORTO
Controlo de Tração em VeículosElétricos
Filipe André Sousa Barbosa
PREPARAÇÃO DA DISSERTAÇÃO
MESTRADO INTEGRADO EM ENGENHARIA ELETROTÉCNICA E DE COMPUTADORESMAJOR: AUTOMAÇÃO
Orientador: Prof. Doutor Adriano Carvalho
13 de Fevereiro de 2013

c© Filipe Barbosa, 2013

Conteúdo
1 Introdução 11.1 Motivação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.3 Conclusão . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2 Estado da Arte 32.1 Visão Geral do Sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32.2 Máquinas Elétricas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.2.1 Motor de Indução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.2.2 Máquina de Íman Permanente . . . . . . . . . . . . . . . . . . . . . . . 52.2.3 Motor de Relutância . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.2.4 Comparação dos principais tipos de motores . . . . . . . . . . . . . . . . 9
2.3 Topologias Conversores de Potência . . . . . . . . . . . . . . . . . . . . . . . . 102.3.1 Conversor de Ponte Assimétrica . . . . . . . . . . . . . . . . . . . . . . 102.3.2 Conversor Split-Capacitor . . . . . . . . . . . . . . . . . . . . . . . . . 112.3.3 Conversor de Miller . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.3.4 Conversor C-Dump . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.4 Métodos e Técnicas de Controlo dos Conversores . . . . . . . . . . . . . . . . . 132.4.1 Técnicas convencionais de controlo binário . . . . . . . . . . . . . . . . 142.4.2 Técnicas avançadas de controlo de binário . . . . . . . . . . . . . . . . . 15
2.5 Plataformas de controlo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.6 Conclusão . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3 Metodologia e Plano de Trabalho 193.1 Metodologia de Trabalho . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.2 Planeamento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.3 Conclusão . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Referências 21
i

ii CONTEÚDO

Lista de Figuras
2.1 Conceito Geral do Sistema aplicado ao Veiculo Elétrico [1]. . . . . . . . . . . . 32.2 Curvas Características da performance das Maquinas Elétricas, aplicadas a tração
[1]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.3 Curvas características de binário, velocidade e potencia do motor de indução [2]. 52.4 Curvas Características do Fluxo Magnético no Estator e a Força contraeletromotriz
na maquina BLDC e PMSM [3]. . . . . . . . . . . . . . . . . . . . . . . . . . . 62.5 Curvas Características de binário/velocidade do motor síncrono de íman perma-
nente [4]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.6 (a) Motor de Relutância Comutada, 8 polos no estator e 6 polos no rotor, 8/6 SRM,
(b) Curva característica de Binário-Velocidade, motor SRM. [4] . . . . . . . . . 82.7 Varias topologias de construção do rotor de um motor SynRM [5]; (a) Polos Sali-
entes, (b) Laminagem Axial Anisotrópica, (c) Laminagem Transversal Anisotrópica 92.8 Conversor ponte Assimétrica quadrifasico [6]. . . . . . . . . . . . . . . . . . . 112.9 Conversor Split-Capacitor [6]. . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.10 Conversor Miller [6]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.11 (a) C-dump Conversor I, (b) C-dump Conversor II. [6] . . . . . . . . . . . . . . 122.12 Variação da indutância (a) e do binário (b) em função da velocidade [16]. . . . . 132.13 Diagrama de controlo DITC [16]. . . . . . . . . . . . . . . . . . . . . . . . . . 152.14 Diagrama de controlo ADITC [16]. . . . . . . . . . . . . . . . . . . . . . . . . 162.15 Diagrama de controlo indireto de binário (TSF) [16]. . . . . . . . . . . . . . . . 17
3.1 Diagrama de Gantt, com as principais tarefas do projeto . . . . . . . . . . . . . 20
iii

iv LISTA DE FIGURAS

Lista de Tabelas
2.1 Tabela comparativa entre os principais tipo de motores aplicados a tração elétrica[7] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
v

vi LISTA DE TABELAS
Abreviaturas e Símbolos
Abreviaturas (Ordem Alfabética)
AC Alternate CurrentADITC Advaced Direct Instantaneous Torque ControlALA Laminagem Axial AnisotrópicaBLDC BrushLess Direct CurrentDC Direct CurrentDITC Direct Instantaneous Torque ControlDSP Digital Signal ProcessorCI Combustão InternaEMF Força EletromotrizFOC Field Orientation ControlFPGA Field-Programmable Gate ArrayPMSM Permanent Magnet Sincronous MachinePWM Pulse With ModulationSRM Switched Reluctance MotorSynRM Synchronous Reluctance MotorTLA Laminagem Transversal AnisotrópicaTSF Torque Sharing Control
Símbolos
∂ Operador Diferencialθ Posição angular do rotorω Velocidade angular do rotorE Força Eletromotriz induzidai Corrente por faseL Indutância da faseTe Binário eletromagnético, por faseTtotal Binário eletromagnético, total
vii

Capítulo 1
Introdução
Este documento apresenta o trabalho desenvolvido na preparação para a dissertação. Esta
dissertação intitulada Controlo de Tração em Veículos Elétricos, será desenvolvida como projeto
de final de curso no âmbito do Mestrado Integrado em Engenharia Eletrotecnia e de Computadores
da Faculdade de Engenharia da Universidade do Porto.
Numa primeira fase deste documento, será apresentado a Motivação e os Objetivos deste pro-
jeto. Bem como, o planeamento de todo o trabalho a desenvolver. Posteriormente, é apresentado
um estudo do Estado da Arte, dos principais elementos presentes no sistema de controlo de tração.
1.1 Motivação
Milhares de veículos circulam nas estradas diariamente, por todo o Mundo. A grande maioria
desses veículos são movidos a motores de combustão interna, para além de muito pouco eficien-
tes, estes motores emitem gases poluentes ao meio ambiente, tais como o dióxido de carbono e o
dióxido de azoto. Apesar de vários esforços dos fabricantes de automóveis movidos com moto-
res de combustão interna, para baixar os consumos e consequentemente tentar baixar também as
emissões de gases poluentes, este tipo de veículos tem os dias contados. Em alguns países este
tipo de veículos paga taxas extra de estacionamento dentro das grandes cidades. A diminuição
da circulação de veículos com motores CI reflete-se numa melhoria da qualidade do ar dentro
das grandes metrópoles. Recentemente a capital Chinesa, Pequim, paralisou devido a poluição
atmosférica. Fazendo com que varias fábricas fossem temporariamente encerradas e que 30% da
frota automóvel governamental fosse retirada das ruas [8]. Em Portugal, os setores do transporte
foram responsáveis por 41% do total de emissões de gases com efeito de estufa, em 2010 [9].
Entretanto medidas têm sido tomadas para combater este tipo de poluição, na cidade de Lisboa,
algumas áreas já são restritas a veículos sem filtro de partículas [10].
Esta problemática faz com que cada vez mais seja necessário tomar medidas preventivas e
baixar as emissões de gases poluentes na atmosfera. A isto se prende a necessidade de encontrar
alternativas, energeticamente e ecologicamente viáveis, que garantam a mobilidade de pessoas e
mercadorias.
1

2 Introdução
Isto abre possibilidades à entrada no mercado de novas tecnologias. Assim começam a surgir
veículos baseados em topologias hibridas ou apenas elétricos. Atualmente este tipo de veículos
representam apenas um nicho de mercado mas espera-se que no futuro estes venham a crescer [1].
Destas topologias, a elétrica é a que atrai a maior atenção desta dissertação. Os veículos
elétricos apresentam alta eficiência energética, zero emissões, alta densidade de potencia e binário
elevado [11, 7]. Varias marcas de automóveis já têm veículos de tração elétrica nas suas linhas de
produção. Isto associa-se ao elevado potencial deste tipo de topologia, e o negócio associado ao
desenvolvimento deste tipo de veículos. A motivação desta dissertação prende-se essencialmente
no estudo das topologias de controlo associados a este tipo de tração.
1.2 Objetivos
Neste trabalho pretende-se desenvolver um controlador para um sistema de tração de um veí-
culo elétrico, de acordo com o perfil de tração especificado pela Norma Europeia. Pretende-se que
o acionamento do motor elétrico seja capaz de satisfazer as necessidades de aceleração e veloci-
dade do condutor, bem como, capaz de efetuar recuperação de energia em caso de desaceleração
ou travagem. Esta energia elétrica é posteriormente armazenada no barramento DC. O barramento
DC, é baseado em baterias de Iões de Lítio/Polímero. Os pontos principais deste trabalho podem
ser divididos:
• Estudo do Estado da Arte, metodologia e plano de trabalho;
• Modelação do Sistema de Tração;
• Analise do comportamento dinâmico do sistema;
• Construção laboratorial de um protótipo;
• Analise do funcionamento do protótipo e testes ao sistema;
No final de todos estes objetivos, a escrita do relatório final da dissertação, que engloba todo
o trabalho realizado até então.
1.3 Conclusão
Neste capitulo foi introduzido o âmbito deste projeto assim como foi feita a descrição da
estrutura deste documento em particular.
O objetivo deste capitulo é mostrar a motivação que levou ao desenvolvimento desta disser-
tação, tocando em alguns problemas com que a sociedade atual se depara e dando uma visão
transversal dos problemas. Começando por uma visão mais global dos problemas e posterior-
mente analisando numa visão mais focalizada. Os objetivos deste projeto também se encontram
descritos.

Capítulo 2
Estado da Arte
Neste capítulo será apresentada a revisão bibliográfica e serão estudados os atuais níveis de
desenvolvimento de cada um dos subcomponentes deste projeto. O objetivo deste projeto é realizar
o controlo de tração aplicado a veículos elétricos. Como este tema trata um problema complexo,
começou-se por dividir o tema principal em pequenos subtemas, ou problemas menos complexos,
para tornar a sua resolução mais simples. Os subsistemas principais a serem estudados neste
capítulo classificam-se em tipos de motores elétricos, topologias de conversores de potência e
métodos de controlo desses conversores.
2.1 Visão Geral do Sistema
Nos últimos tempos têm surgido diversas soluções, apresentadas por empresas do sector auto-
móvel. No entanto o conceito base do sistema tem permanecido inalterado.
Figura 2.1: Conceito Geral do Sistema aplicado ao Veiculo Elétrico [1].
3

4 Estado da Arte
O motor elétrico fornece toda a potência de tração as rodas. Este motor, normalmente trifásico,
necessita de um sistema auxiliar de conversão de energia, este sistema de conversão efetua também
o comando e controlo do motor elétrico. Este controlo funciona de acordo com os requisitos
impostos pelo pedal do acelerador e do travão. Neste documento apenas será analisado o conceito
do lado da propulsão elétrica, não sendo relevantes os outros subsistemas do conceito.
2.2 Máquinas Elétricas
A máquina elétrica é o principal elemento deste projeto. É nela que estará centrado todo o
trabalho da dissertação. Em geral, as máquinas elétricas são caraterizadas pela sua performance,
elevado rendimento e binário elevado a baixa velocidade. Quando utilizadas no âmbito da tração
de veículos elétricos, as máquinas elétricas não só funcionam como motor do veículo. Como em
caso de desacelerações estas podem funcionar como gerador, aproveitando a energia das trava-
gens ou das descidas. Segundo a literatura [7, 4], os motores elétricos devem obedecer a certos
parâmetros mínimos para poderem ser uma boa escolha no âmbito da tração elétrica.
Figura 2.2: Curvas Características da performance das Maquinas Elétricas, aplicadas a tração [1].
O motor deve ter alta potência instantânea e alta densidade de potência, elevado binário a
baixas rotações, para efetuar arranques, em terreno plano, bem como enfrentar subidas inclinadas.
Assim como elevada potencia para alta velocidade para regimes de velocidade de cruzeiro. Deve
ter uma ampla gama de velocidade incluindo nessa gama, zonas de binário constante e zonas de
potência constante. Ter uma resposta de binário, rápida. Elevada eficiência para gamas altas de
velocidade e de binário. Elevada eficiência nas travagens regenerativas. Alta fiabilidade e robustez
para as várias condições de operação do veículo. E acima de tudo, e nos dias de hoje cada vez
mais importante, ter um custo razoável.
2.2.1 Motor de Indução
As máquinas de indução são o tipo de máquinas mais usado ao nível mundial. Tanto em
aplicações industriais como domésticas. Isto deve-se á sua simples construção, alta densidade de
potência, fiabilidade, robustez, baixa necessidade de manutenção, baixo custo e capacidade em

2.2 Máquinas Elétricas 5
Figura 2.3: Curvas características de binário, velocidade e potencia do motor de indução [2].
operar em ambientes hostis. A sua tecnologia está totalmente maturada, e é aplicado em diversas
aplicações pelas características apresentadas.
Este motor pode ser facilmente controlado recorrendo a métodos de controlo escalares ou
vetoriais. O uso deste ultimo método em particular, é mais robusto e fiável para aplicações de
binário e velocidade variável. O uso de métodos de controlo vetorial, mais propriamente o método
de controlo por orientação de campo (FOC) permite controlar independentemente o binário e o
campo magnético. Isto permite ao motor de indução ter características semelhantes ao motor DC
de excitação externa [7].
A utilização de técnicas de enfraquecimento de campo, proporciona uma extensão da gama
de velocidades do motor de indução, podendo no entanto comprometer a eficiência e o binário
produzido pelo motor. A existência de uma quebra significativa de binário, e eficiência do motor
na zona de potencia constante, bem como aumento das perdas para velocidades elevadas faz deste
tipo de motor um candidato relativamente mais fraco para a aplicação neste projeto face ao PMSM
e ao SRM.
2.2.2 Máquina de Íman Permanente
Os motores de íman permanente são particularmente conhecidos pela sua elevada eficiência e
alta densidade de potência. Podem ser classificados em 2 tipos:
• Motor Síncrono de Íman Permanente (PMSM);
• Motor de Corrente Continua, Sem Escovas (BLDC);
A maior desvantagem dos motores de íman permanente é o elevado custo do material mag-
nético de elevada densidade energética [12]. O custo deste tipo de material tem vindo aumentar
exponencialmente com o aumento da procura. Materiais como o neodímio e o disprósio prove-
nientes das ditas terras raras, conjunto de países Asiáticos onde existem reservas destes mariais.
Nomeadamente a China que é a maior reserva mundial de materiais magnéticos de elevada densi-
dade energética.

6 Estado da Arte
Figura 2.4: Curvas Características do Fluxo Magnético no Estator e a Força contraeletromotriz namaquina BLDC e PMSM [3].
A segurança é uma questão critica, porque o campo gerado pelo material magnético pode
causar graves consequências durante uma falha por curto-circuito [13]. As máquinas BLDC,
tem baixa capacidade de enfraquecimento de campo, quando o material magnético é montado na
superfície do rotor. Quando utilizada como motor elétrico, este sistema pode necessitar de uma
caixa redutora na transmissão.
Quando o material magnético é montado no interior do rotor, PMSM, é adicionado ao motor,
um binário de relutância adicionado ao binário de reação. Isto pode resultar numa maior gama
de potência de operação. Esta topologia aumenta o custo do sistema e pode reduzir a velocidade
máxima [13]. Característica que pode ser observada na curva de binário/velocidade do motor,
figura 2.5.
Figura 2.5: Curvas Características de binário/velocidade do motor síncrono de íman permanente[4].
Apesar destes dois tipos de motores apresentarem também uma boa solução e atualmente
serem a escolha de algumas marcas de automóveis como sendo a solução mais adequada para a
tração elétrica. Neste documento, estes dois tipos de motores não serão abordados com muito
2.2 Máquinas Elétricas 7
detalhe, muito pelo facto de utilizarem íman permanente. Os ímanes permanentes têm tido grande
procura nos últimos tempos, isto reflete-se num aumento significativo do preço deste material
[12]. Por isso, nesta dissertação este tipo de motor não será abordado.
2.2.3 Motor de Relutância
Os motores de relutância baseiam-se no princípio da relutância magnética, este princípio pode
ser explicado criando uma analogia com os circuitos elétricos. A reatância magnética funciona
como resistência á passagem do fluxo magnético, variando a relutância consegue-se controlar
o fluxo magnético e consequentemente o binário que é produzido. Este tipo de motor elétrico
induz polos magnéticos não permanentes num rotor ferromagnético, sem qualquer tipo de íman
permanente nem enrolamento, por isso não existem perdas de Joule no motor, do lado do rotor.
As máquinas de relutância magnética podem ser divididas segundo as suas características.
• Motor de relutância comutada;
• Motor de relutância síncrona;
• Motor de passo;
De seguida serão analisados com mais detalhe dois destes tipos de motor, o de relutância
comutada (SRM), e o motor de relutância síncrona. Apesar do motor de passo ser também um
tipo de motor de relutância não será analisado posteriormente com mais detalhe pois está um
pouco fora do âmbito deste trabalho.
Será dada mais ênfase ao motor de relutância comutada pois foi o tipo de motor escolhido
para implementar neste trabalho, essa escolha baseou-se principalmente no facto deste tipo de
motor não necessitar da utilização de íman permanente, e do consequente aumento do preço deste
tipo de material [12]. Pois pretendia-se uma solução que cumprisse todas as especificações de
binário, potencia e velocidade, mas que acima de tudo tivesse um custo acessível e não estivesse
dependente de nenhum tipo de material exótico.
2.2.3.1 Motor de Relutância Comutada
Este tipo de motor tem vindo a ganhar cada vez mais atenção, ao nível da tração elétrica, pelo
facto de não usar íman permanente, pela sua simplicidade de operação e segurança [13]. Este tipo
de motor apresenta-se como um ótimo candidato nesta área, porque apresenta alta performance e
baixo custo, aliado a uma estrutura robusta, apropriada para condições ambientais adversas e apli-
cações de elevada velocidade. Este tipo de motor não utiliza qualquer tipo de íman permanente e
também não necessita de escovas, dai que não requer muitos cuidados de manutenção. A estrutura
do motor de relutância comutada é similar ao motor de passo [1].
Em regime permanente o SRM funciona numa região constante da gama de potência. O biná-
rio deste tipo de motor provém da força de alinhamento dos polos do rotor com os polos, excitados,
do estator. O facto de ter polos salientes pode causar vibrações inconstantes no veio do motor e
8 Estado da Arte
problemas ao nível acústico. Isto resulta num elevado ruido e binário inconstante, comparativa-
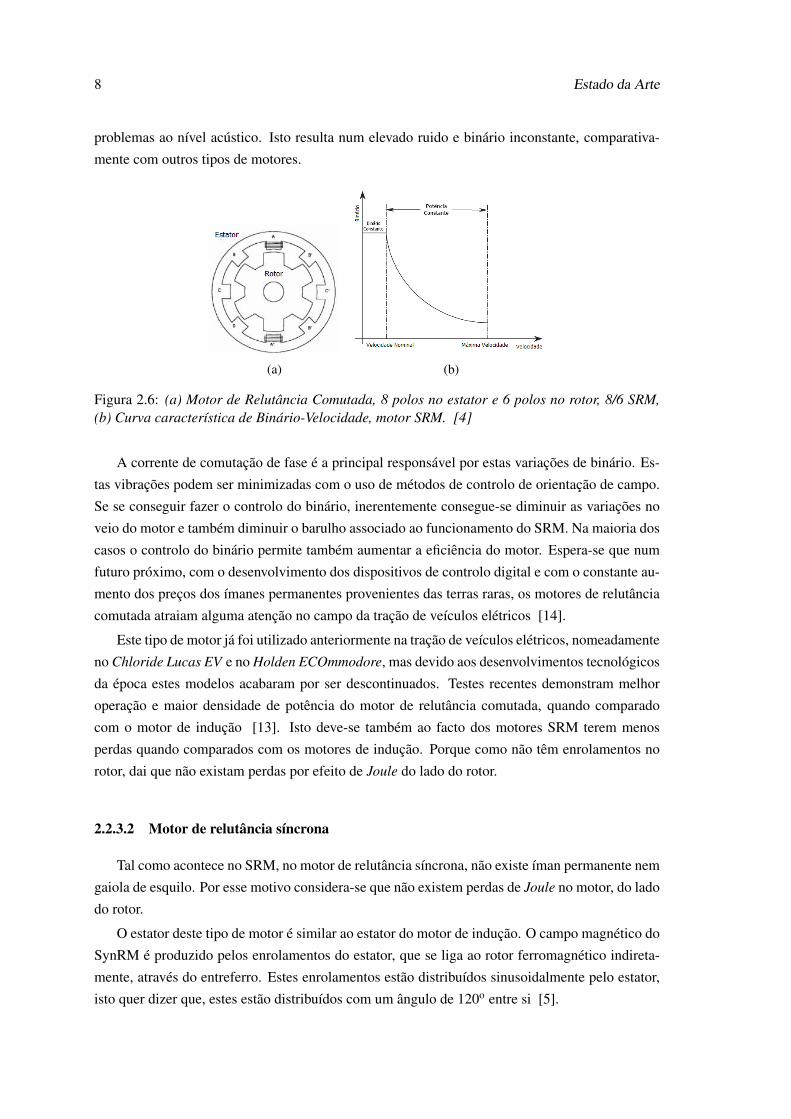
mente com outros tipos de motores.
(a) (b)
Figura 2.6: (a) Motor de Relutância Comutada, 8 polos no estator e 6 polos no rotor, 8/6 SRM,(b) Curva característica de Binário-Velocidade, motor SRM. [4]
A corrente de comutação de fase é a principal responsável por estas variações de binário. Es-
tas vibrações podem ser minimizadas com o uso de métodos de controlo de orientação de campo.
Se se conseguir fazer o controlo do binário, inerentemente consegue-se diminuir as variações no
veio do motor e também diminuir o barulho associado ao funcionamento do SRM. Na maioria dos
casos o controlo do binário permite também aumentar a eficiência do motor. Espera-se que num
futuro próximo, com o desenvolvimento dos dispositivos de controlo digital e com o constante au-
mento dos preços dos ímanes permanentes provenientes das terras raras, os motores de relutância
comutada atraiam alguma atenção no campo da tração de veículos elétricos [14].
Este tipo de motor já foi utilizado anteriormente na tração de veículos elétricos, nomeadamente
no Chloride Lucas EV e no Holden ECOmmodore, mas devido aos desenvolvimentos tecnológicos
da época estes modelos acabaram por ser descontinuados. Testes recentes demonstram melhor
operação e maior densidade de potência do motor de relutância comutada, quando comparado
com o motor de indução [13]. Isto deve-se também ao facto dos motores SRM terem menos
perdas quando comparados com os motores de indução. Porque como não têm enrolamentos no
rotor, dai que não existam perdas por efeito de Joule do lado do rotor.
2.2.3.2 Motor de relutância síncrona
Tal como acontece no SRM, no motor de relutância síncrona, não existe íman permanente nem
gaiola de esquilo. Por esse motivo considera-se que não existem perdas de Joule no motor, do lado
do rotor.
O estator deste tipo de motor é similar ao estator do motor de indução. O campo magnético do
SynRM é produzido pelos enrolamentos do estator, que se liga ao rotor ferromagnético indireta-
mente, através do entreferro. Estes enrolamentos estão distribuídos sinusoidalmente pelo estator,
isto quer dizer que, estes estão distribuídos com um ângulo de 120o entre si [5].

2.2 Máquinas Elétricas 9
Este tipo de motor não tem característica de binário de arranque, dai ser comum a introdução
de uma gaiola de esquilo convencional, dos motores de indução, do lado do rotor para produzir
o binário de arranque de forma assíncrona [5]. Atualmente, com o uso de inversores eletrónicos
e técnicas de orientação de campo e PWM, é possível arrancar o motor sem o uso de gaiola de
esquilo do lado do rotor [5]. Existem 3 grandes tipos de construção do rotor deste tipo de motor:
• Polos Salientes;
• Laminagem Axial Anisotrópica (ALA);
• Laminagem Transversal Anisotrópica (TLA);
Figura 2.7: Varias topologias de construção do rotor de um motor SynRM [5]; (a) Polos Salientes,(b) Laminagem Axial Anisotrópica, (c) Laminagem Transversal Anisotrópica
2.2.4 Comparação dos principais tipos de motores
Na literatura estão realizadas varias comparações entre os vários tipos de motores aplicados
a tração elétrica [15, 11, 2]. As varias comparações não estão em concordância no que toca
ao melhor tipo de motor a aplicar. No entanto o motor PMSM é normalmente um candidato de
peso, que tem vindo a perder notoriedade devido ao aumento do preço dos materiais magnéticos
permanentes. Isto tem aberto oportunidade para outros tipos de motores poderem aparecer no
mercado da tração elétrica como é o caso do SRM, que será também o objetivo de trabalho nesta
dissertação.
Na tentativa de escolher o tipo de motor que melhor se adequa a aplicação deste projeto, foi
realizada a seguinte tabela 2.1, nesta estão representados os principais tipos de motores analisados
Tabela 2.1: Tabela comparativa entre os principais tipo de motores aplicados a tração elétrica [7]
Motor de Indução Motor de Íman Permanente Motor de Relutância ComutadaEficiência 4 5 4.5Peso 4 4.5 5Custo 4 3 4Total 12 12.5 13.5
10 Estado da Arte
neste documento, bem como a classificação de cada um deles de acordo com três parâmetros: a
eficiência, o peso e o custo. A classificação é realizada de 1 a 5, em que 5 representa a melhor
eficiência, menor peso e menor custo, respetivamente.
2.3 Topologias Conversores de Potência
Os conversores de potência são uma peça fundamental neste projeto, estes serão responsáveis
por transferir a potência desde a fonte de energia até ao motor. A fonte de energia será á partida
representada por uma bateria de iões de Lítio/ polímero. Como se pretende passar uma energia
baseada em corrente continua para corrente alternada. A topologia adequada para esta função será
uma topologia DC/AC, ou seja, uma topologia inversora.
O conversor é também responsável por fazer o controlo do motor, realizando a troca de energia
entre o motor e a fonte de energia, quando este realiza travagem regenerativa. Portanto também se
pode concluir que neste projeto devem ser utilizadas topologias de conversores bidirecionais.
No motor de relutância comutada o binário é independente da direção do fluxo da corrente
[6]. Portanto, ao contrario do que se passa noutros tipo de motores, como é o caso do motor de
indução e do PMSM, em que é necessário um conversor com modulação bipolar. No caso do
motor de relutância o conversor pode ser modelado de forma unipolar.
Na literatura existem varias topologias de conversores DC/AC dedicados os motores de re-
lutância comutada. Estas topologias variam consoante a aplicação do motor. Dependendo do
número de fases do motor (metade do numero de polos do estator), e do número de semicondu-
tores que utilizam. Neste documento apenas serão analisadas algumas dessas topologias, outras
topologias para os conversores de potência poderão ser analisadas em [6, 16].
• Conversor de Ponte Assimétrica;
• Conversor de Ponte Completa, Split-Capacitor;
• Conversor de Miller;
• Conversor C-Dump ou de Eficiência Energética;
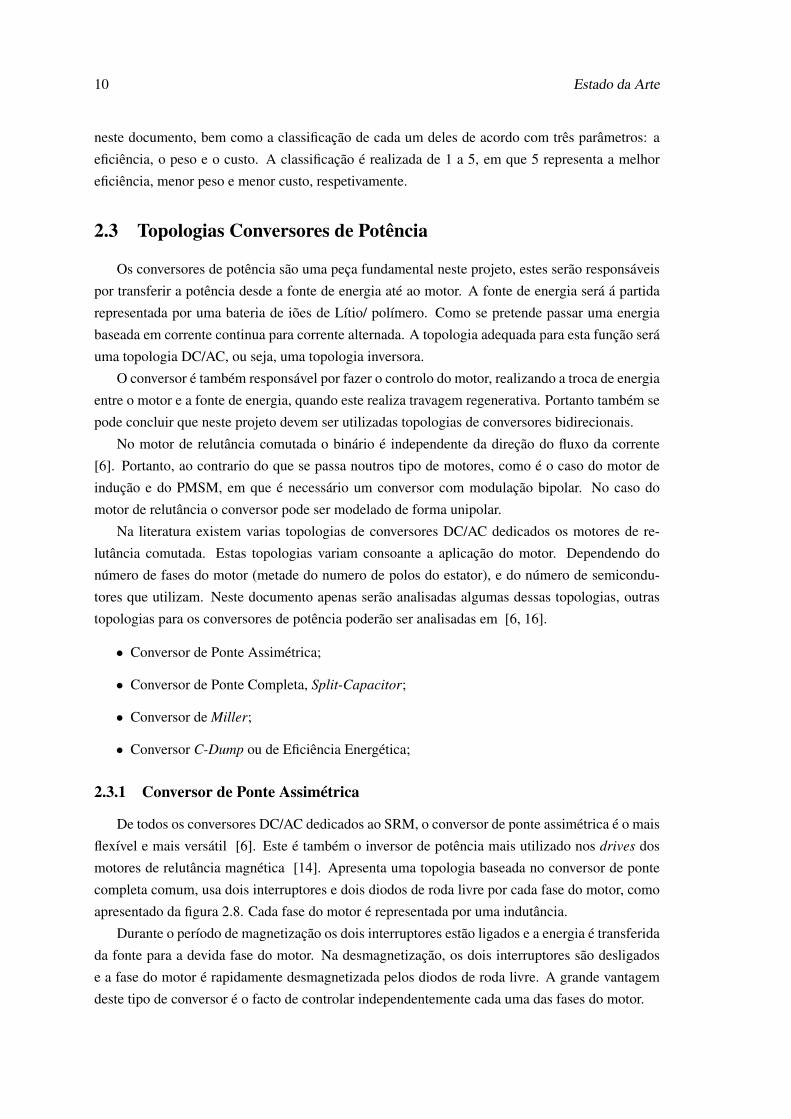
2.3.1 Conversor de Ponte Assimétrica
De todos os conversores DC/AC dedicados ao SRM, o conversor de ponte assimétrica é o mais
flexível e mais versátil [6]. Este é também o inversor de potência mais utilizado nos drives dos
motores de relutância magnética [14]. Apresenta uma topologia baseada no conversor de ponte
completa comum, usa dois interruptores e dois diodos de roda livre por cada fase do motor, como
apresentado da figura 2.8. Cada fase do motor é representada por uma indutância.
Durante o período de magnetização os dois interruptores estão ligados e a energia é transferida
da fonte para a devida fase do motor. Na desmagnetização, os dois interruptores são desligados
e a fase do motor é rapidamente desmagnetizada pelos diodos de roda livre. A grande vantagem
deste tipo de conversor é o facto de controlar independentemente cada uma das fases do motor.

2.3 Topologias Conversores de Potência 11
Figura 2.8: Conversor ponte Assimétrica quadrifasico [6].
A única desvantagem deste tipo de conversor, está no facto deste tipo conversor usar dois
interruptores por fase, aumentando o tamanho do dispositivo, o preço e consequentemente as
perdas. Esta topologia é usada para implementar métodos de controlo baseadas em PWM ou
Histerese.
2.3.2 Conversor Split-Capacitor
A principal vantagem desta topologia baseia-se na utilização de apenas um interruptor por
fase, isto implica a utilização de apenas metade da tensão de entrada, que está dividida pelos dois
condensadores, figura 2.9. Estes condensadores têm de ter capacidade de suportar essa tensão,
assim como todos os semicondutores.
As desvantagens desta topologia baseiam-se na produção do binário, apenas metade da tensão
de entrada pode ser aplicada no motor. De modo a manter o equilíbrio do fluxo de energia entre os
dois condensadores da fonte, os interruptores e diodos de roda livre, estes estão transpostos para
cada enrolamento da fase. O que significa que este conversor só pode ser usado em motores cujo
numero de fases seja par.
Figura 2.9: Conversor Split-Capacitor [6].

12 Estado da Arte
2.3.3 Conversor de Miller
Este conversor é uma variante para aplicações de baixa velocidade do conversor 2.3.2 Split-
Capacitor [6]. A principal característica desta topologia de conversor é a utilização de um inter-
ruptor comum a todas as fases do motor, figura 2.10.
Figura 2.10: Conversor Miller [6].
A principal limitação desta topologia está no funcionamento com velocidades mais elevadas,
porque o período de comutação do interruptor comum é demasiado pequeno e não garante que cada
uma das fases consiga desmagnetizar completamente pelo diodo de roda livre correspondente.
2.3.4 Conversor C-Dump
Numa tentativa de reduzir o numero de interruptores por fase e consequentemente minimizar as
perdas, surgem dois conversores energeticamente mais eficientes, com possibilidade regenerativa
completa [6]. Estes dois conversores C-Dump podem ser facilmente controlados usando técnicas
PWM. Estas duas topologias de conversores de potência permitem uma rápida desmagnetização
da fase, mesmo com altas frequências de comutação.
No caso do conversor I, a magnetização de cada fase é realizada por via do interruptor em cada
fase, auxiliado do interruptor comum. No conversor II, a magnetização é realizada por via, não só
do interruptor existente em cada uma das fases e o interruptor comum, mas também, é imposto o
fluxo da corrente por via de um diodo.
(a) (b)
Figura 2.11: (a) C-dump Conversor I, (b) C-dump Conversor II. [6]

2.4 Métodos e Técnicas de Controlo dos Conversores 13
2.4 Métodos e Técnicas de Controlo dos Conversores
Os principais problemas ao nível do motor de relutância comutada, são o seu elevado ruído
acústico e as vibrações inconstantes no veio, que se refletem em flutuações no binário produzido
pelo motor. Estas duas grandes desvantagens deste tipo de motor, podem ser minimizadas pela
utilização acertada de alguns métodos e técnicas de controlo. Estes métodos e técnicas de controlo
tem vindo a ser desenvolvidos em paralelo com o desenvolvimento do próprio motor de relutância.
Atualmente o desenvolvimento computacional permite a utilização de técnicas de controlo mais
avançadas e consequentemente melhoria significativa do comportamento do SRM.
Dependendo da aplicação que se pretende, na literatura são abordados vários métodos e téc-
nicas de controlo para o motor de relutância comutada, podem ser estudadas com mais detalhe
em [16, 14, 6]. As aplicações de tração elétrica, requerem da parte do motor de relutância, uma
responta de binário e potência constantes, e larga gama de velocidades de operação. Assim foram
selecionados os métodos de controlo que melhor se enquadram com estas especificações. Neste
documento não são especificados com muito detalhe as variantes de cada um dos métodos.
Figura 2.12: Variação da indutância (a) e do binário (b) em função da velocidade [16].
No motor de relutância comutada, o binário é proporcional ao quadrado da corrente da fase, e
da variação da indutância. Uma vez que o binário é proporcional ao quadrado da corrente, pode
ser gerado independentemente da direção do fluxo da corrente. E também porque a polaridade do
binário é alterada de acordo com a variação da indutância, figura 2.12. Para se exercer controlo
sobre o binário do motor SRM, a comutação da excitação das indutâncias tem de estar síncrona
com o ângulo de posição do rotor.
A força eletromotriz induzida e o binário eletromagnético gerado pelo motor de relutância
comutada podem ser expressos segundo a variação da co-energia magnética, Wc, sob as condições
de saturação:
E =∂ 2Wc
∂θ∂ iω≈dL(θ)
dθiω; (2.1)
14 Estado da Arte
Te =∂ 2Wc
∂θ≈1
2dL(θ)
dθi2; (2.2)
onde θ , ω , L e i, representam a posição do rotor, a velocidade angular, a indutância e a corrente
por fase. Pode-se conclui que o binário produzido por um motor de relutância comutada, pode ser
calculado:
Ttotal(θ , i) = ∑no f ases
Te(θ , i); (2.3)
Neste documento não é definido nenhum modelo equivalente para o SRM, apenas são apre-
sentadas as principais equações para realizar o controlo do motor e perceber o seu principio de
funcionamento. Posteriormente no relatório final da dissertação, haverá um capitulo inteiramente
dedicado ao modelo equivalente do motor de relutância comutada, que é descrito por três equações
diferenciais, a equação de tensão, equação de movimento, e a equação de binário eletromagnético,
esta ultima apresentada na equação 2.2.
2.4.1 Técnicas convencionais de controlo binário
• Método de controlo do Ângulo;
• Método de controlo de Corrente;
2.4.1.1 Controlo do Ângulo
O motor de relutância comutada é uma maquina com boas características de regulação de velo-
cidade, e elevada eficiência energética. Contudo existem problemas relacionados com as elevadas
flutuações do binário produzido pelo motor, aliadas a imprecisões no controlo da velocidade. Es-
tes problemas residem no facto do circuito de comando do motor de relutância não ter em conta
a corrente especifica, gerada pela força magnetomotriz, no processamento da posição do rotor e
da tensão de entrada [16]. Para se conseguir alta precisão na velocidade de rotação e elevada
eficiência, é necessário que o circuito de comando controle instantaneamente a posição do rotor e
a tensão de entrada [16].
Dentro do método de controlo do ângulo existem três técnicas principais de controlo, técnica
de controlo dinâmico do ângulo, técnica de controlo de impulso e técnica de controlo do ângulo
de comutação. Dentro desta existem ainda três variantes, fixação do ângulo de comutação, avanço
do ângulo de comutação e Switching-off do ângulo de comutação.
2.4.1.2 Controlo de Corrente
O motor de relutância magnética pode ser controlado de diversas formas [16]. Uma dessas
formas, consiste no método de controlo da corrente na fase. Este método é normalmente utilizado
quando se pretende controlar de forma eficiente o binário produzido pelo motor.

2.4 Métodos e Técnicas de Controlo dos Conversores 15
O principal objetivo deste método é controlar o tempo e a largura dos impulsos de tensão.
Exitem duas variantes de controlo dentro do método de controlo de corrente, a técnica controlo de
histerese e a técnica de controlo da tensão de corte.
A técnica de tensão de corte não tem qualquer limitação de corrente, a utilização do sensor de
corrente é desnecessária, quando se aplica esta técnica. O que faz com que normalmente possa ser
aplicado em sistemas de baixo custo [16].
Com o desenvolvimento dos microcontroladores, os métodos de controlo têm-se adaptado, e
têm vindo a alterar as suas plataformas de implementação analógica para plataformas de imple-
mentação digitais.
2.4.2 Técnicas avançadas de controlo de binário
• Método de Controlo Direto de Binário Instantâneo (DITC);
• Método Avançado de Controlo Direto de Binário Instantâneo (ADITC);
• Método de Controlo Indireto de Binário;
2.4.2.1 Método de Controlo Direto de Binário Instantâneo
O Método de Controlo Direto de Binário Instantâneo usa um simples esquema de controlo
aliado a um controlador de histerese, com o intuito de reduzir as variações do binário produzido
pelo motor.
O método DITC convencional, usa apenas um simples controlo de histerese, a comutação de
estados depende da banda de histerese definida no controlador. Apenas o estado de uma das fases
é aplicado, em cada período, para determinar o erro associado ao binário produzido.
Figura 2.13: Diagrama de controlo DITC [16].

16 Estado da Arte
2.4.2.2 Método Avançado de Controlo Direto de Binário Instantâneo
O método avançado de controlo direto de binário instantâneo (ADITC) apresenta característi-
cas do método convencional DITC e do método PWM.
A relação de condução dos interruptores de cada fase é regulada de acordo com o erro de
binário e regras de controle simples do controlo direto de binário instantâneo (DITC). Isto permite
que o tempo de amostragem do controlador possa ser prolongado, e consequentemente permite
a aplicação deste método em microcontroladores de baixo custo. Tornando possível aplicar este
método em aplicações de baixo custo, onde se pretenda um controlo preciso no binário do motor.
Figura 2.14: Diagrama de controlo ADITC [16].
O método ADITC permite ajustar a tensão média por fase para controlar a variação da corrente
na fase num tempo de amostragem fixo. Esse tempo de amostragem pode ser aumentado de modo
a obter uma variação de binário inferior à que se obteria usando o método de controlo DITC
convencional [16].
O gerador PWM é adicionado de modo a que a frequência de comutação do método ADITC
seja o dobro do método DITC, com um tempo de amostragem uniforme no pior dos casos [16].
Assim, aumentam as perdas por comutação e o ruido eletromagnético (EMC). Representando
deste modo duas desvantagens à utilização do método de controlo ADITC.
2.4.2.3 Método de Controlo Indireto de Binário
Outro método de controlo que permite produzir um binário continuo e constante no veio do
motor é o método de controlo indireto de binário, este baseia-se na utilização de algoritmos com-
plexos ou funções de distribuição para distribuir o binário pelas fases e obter o sinal de corrente
de comando respetivo. Então é introduzido um controlador de corrente para controlar o binário
por fase através da corrente na fase. É então introduzida uma função de partilha de binário (TSF),
linear, cosseno e de logica não linear [16].

2.5 Plataformas de controlo 17
Além dos métodos de controlo direto de binário, também existem outros métodos, de controlo
indireto de binário. O método TSF é um desses métodos. Apresenta-se como um método simples
e eficaz de controlo de binário, muito popular entre os métodos de controlo indireto [16].
Simplesmente divide a curva de binário partilhado entre as fases e usa essa divisão para gerar
binário constante. O binário de cada fase pode ser atribuído à corrente dessa mesma fase, de modo
a fazer com que o binário produzido seja constante. O binário de cada fase é proporcional ao
quadrado da corrente na fase. Assim, as variações de corrente devem ser pequenas o suficiente
para gerar binário constante no motor [16]. A frequência do controlador de corrente deve ser
elevada para garantir que isso aconteça.
Figura 2.15: Diagrama de controlo indireto de binário (TSF) [16].
2.5 Plataformas de controlo
A melhoria da performance do motor de relutância comutada, ao nível das variações de binário
e do ruido acústico, deve-se, não são só à evolução dos métodos e técnicas de controlo, por si só,
mas também à evolução inerente das plataformas de controlo. Realizar controlo do motor, com
elevada precisão, é complexo e requer elevada capacidade de processamento. Isto prende-se à
necessidade de ter processamento digital, multitarefa com elevada velocidade.
Atualmente existem varias tipos de plataformas para realizar este tipo de controlo. Entre as so-
luções disponíveis no mercado, as soluções mais comuns são baseadas na utilização de DPSs (Di-
gital Signal Processor), FPGAs (Field-Programmable Gate Array) e Microprocessadores, estes já
são bastante utilizados em sistema de controlo do motor a combustão dos automóveis comuns.

18 Estado da Arte
2.6 Conclusão
Neste capitulo foi realizada uma revisão bibliográfica dos conteúdos a serem abordados nesta
dissertação. Começou por ser apresentado o conceito geral do sistema. De seguida, passaram a ser
analisadas as possíveis soluções para a maquina elétrica. Por razoes que já foram apresentadas, o
motor de relutância comutada acabou por ser a escolha, a ser implementada neste trabalho.
Posteriormente foram apresentados algumas topologias de conversores de potencia. A escolha
do tipo da topologia do conversor depende quase exclusivamente da aplicação do sistema. Como
se pretende aplicar o SRM em tração, numa primeira fase, o mais indicado será o conversor de
ponte assimétrica pela sua simplicidade e versatilidade.
Foram apresentados também os métodos e técnicas de controlo dos conversores. Este é um
fator decisivo neste trabalho, mas para já ainda não foi tomada nenhuma decisão concreta sobre o
melhor método ou técnica de controlo a usar neste projeto. Foi apenas realizado um estudo sobre
os principais métodos e técnicas de controlo para motor de relutância comutada.
Por ultimo foram referidas as principais plataformas de controlo utilizadas na implementação
do controlo dos motores elétricos. A utilização de métodos de controlo avançado prendem-se tam-
bém à utilização de plataformas de controlo avançadas. Neste capitulo foram apenas referidas três
soluções, não sendo realizada nenhuma escolha nesta primeira fase de trabalhos sobre a utilização
da plataforma de controlo a utilizar nesta aplicação.

Capítulo 3
Metodologia e Plano de Trabalho
Neste capítulo é apresentada a metodologia e o planeamento dos trabalhos a serem realizados
nesta dissertação. Numa fase introdutória, é definida a metodologia associada a realização dos
diversos objetivos do trabalho. Posteriormente, numa primeira fase, de arranque dos trabalhos, o
planeamento ainda não é muito detalhado, e apenas estão definidas as principais tarefas do projeto.
3.1 Metodologia de Trabalho
No âmbito desta dissertação será realizado o estudo, simulação e implementação de um con-
versor DC/AC aplicado a tração elétrica. Mais propriamente aplicado ao controlo do motor de
relutância comutada, que é o principal responsável por gerar a tração de um veiculo elétrico. Após
estudadas todas as características relevantes dos intervenientes deste projeto, o conversor deve ter
capacidade de realizar arranques controlados, em binário e velocidade, dependendo da referencia
de binário imposta pelo condutor.
Numa primeira fase do projeto serão realizadas simulações recorrendo a ferramentas de simu-
lação MATLAB/Simulink R2010b e PSIM 9.1.3 Student Version, de todos os intervenientes do
sistema, estudados no capitulo anterior 2, de modo a validar algumas questões criticas do funcio-
namento do sistema.
Para desenvolvimento de todos os documentos escritos serão utilizadas ferramentas do Micro-
soft Office 2010 (Word, Excel, Project), bem como Latex/MiKTex para desenvolvimento de todos
os relatórios intermédios e escrita do relatório final da dissertação.
Posteriormente o hardware necessário para a implementação será apresentado no documento
final da dissertação após análise mais detalhada e implementação do sistema.
3.2 Planeamento
O planeamento das principais tarefas deste projeto foi realizado de modo a que todos os obje-
tivos propostos inicialmente sejam cumpridos. Nesta secção apenas serão mostradas as tarefas a
longo prazo. O detalhe de cada uma das tarefas será apresentado futuramente.
19

20 Metodologia e Plano de Trabalho
Figura 3.1: Diagrama de Gantt, com as principais tarefas do projeto
Para representar temporalmente cada uma das tarefas e realizar um bom planeamento de pro-
jeto, foi utilizada uma ferramenta muito comum na gestão e planeamento de projetos, o diagrama
de Gantt. Este tipo de diagrama mostra não só a representação temporal e ordem das tarefas, como
também, o inicio e fim de cada uma das tarefas, as precedências que existem entre tarefas e tarefas
que possam ser desenvolvidas em paralelo.
As tarefas apresentadas neste diagrama de Gantt estão organizadas e planeadas de maneira a
que o número de horas de trabalho semanal seja, no mínimo, 40 horas semanais. Não contando,
numa primeira fase, trabalhar aos Sábados e Domingos, apesar do diagrama apresentado englobar
esses dias como dias de trabalho.
3.3 Conclusão
Neste capitulo foi descrita a metodologia e o planeamento geral do projeto, utilizando uma
ferramenta bastante utilizada na gestão e planeamento de projetos, o diagrama de Gantt. Esta
ainda é uma primeira fase de planeamento, posteriormente, e com o desenrolar das tarefas, este
ainda pode sofrer alterações mediante o desenvolvimento dos trabalhos e a possibilidade de haver
uma implementação real do sistema.

Referências
[1] Leong Chee Ken Gan Guo Dong, Gan Yu Han e Phuan Zheng Yi. Studies of electric motorsfor light-weight electric vehicle. 2010.
[2] N. Hashemnia e B. Asaei. Comparative study of using different electric motors in the electricvehicles. Em Electrical Machines, 2008. ICEM 2008. 18th International Conference on,páginas 1 –5, sept. 2008. doi:10.1109/ICELMACH.2008.4800157.
[3] Daniel Torres. Comparing motor-control techniques, October 2009. Acedidoem Janeiro de 2013. URL: http://www.ecnmag.com/articles/2009/10/comparing-motor-control-techniques.
[4] M. Zeraouila, M.E.H. Benbouzid, e D. Diallo. Electric motor drive selection issues for hevpropulsion systems: a comparative study. Em Vehicle Power and Propulsion, 2005 IEEEConference, página 8 pp., sept. 2005. doi:10.1109/VPPC.2005.1554571.
[5] Reza Rajabi Moghaddam. Synchronous reluctance machine (synrm) design. Tese de mes-trado, Royal Institute of Technology, 2007.
[6] Timothy L. Skvarenina. The Power Electronics Handbook. CRC Press, 2002.
[7] X.D. Xue, K. Cheng, e N.C. Cheung. Selection of electric motor drives for electric vehicles.Em Power Engineering Conference, 2008. AUPEC ’08. Australasian Universities, dec. 2008.
[8] Diário Económico. Pequim sufocada por nevoeiro venenoso, January 2013. Ace-dido em Janeiro de 2013. URL: http://economico.sapo.pt/noticias/pequim-sufocada-por-nevoeiro-venenoso_161420.html.
[9] I.P Agência Portuguesa do Ambiente. Relatório do estado do ambiente 2012. Out 2012.
[10] Correio da manhã. Câmara de lisboa pode restringir carros, January 2013. Acedidoem Janeiro de 2013. URL: http://www.cmjornal.xl.pt/detalhe/noticias/nacional/sociedade/camara-de-lisboa-pode-restringir-carros.
[11] C.C. Chan. The state of the art of electric and hybrid vehicles. Proceedings of the IEEE,90(2):247–275, feb 2002.
[12] Dr. Eng.; WEG Brasil Sebastião Lauro Nau. Technologies for energy-efficient electric mo-tors. dec. 2011.
[13] Stephen W. Moore, Khwaja M. Rahman, e Mehrdad Ehsani. Effect on Vehicle Performanceof Extending the Constant Power Region of Electric Drive Motors. 1999.
[14] Bogdan M. Wilamowski e J. David Irwin. The Industrial Electronics Handbook - PowerElectonics and Motor Drives. CRC Press, 2o edição, 2011.
21

22 REFERÊNCIAS
[15] C.C. Chan. The state of the art of electric, hybrid, and fuel cell vehicles. Proceedings of theIEEE, 95(4):704 –718, april 2007. doi:10.1109/JPROC.2007.892489.
[16] Jin-Woo Ahn. Switched Reluctance Motor, Torque Control. InTech, 2011.





























