Embed Size (px)
Citation preview
Sistemas Lineares
Laura Goulart
UESB
4 de Dezembro de 2018
Laura Goulart (UESB) Sistemas Lineares 4 de Dezembro de 2018 1 / 1

De�nição
Um sistema linear m × n é um conjunto de equações lineares, com mequações e n variáveis, dado da seguinte forma:
a11x1 + a12x2 + . . .+ a1nxn = b1a21x1 + a22x2 + . . .+ a2nxn = b2
...
am1x1 + am2x2 + . . .+ amnxn = bm
Os números a11, a21, . . . , am1 são ditos coe�cientes da viriável x1, e assim
por diante. Os números b1, b2, . . . , bm são ditos termos independentes.
Laura Goulart (UESB) Sistemas Lineares 4 de Dezembro de 2018 2 / 1
De�nição
Um sistema linear m × n é um conjunto de equações lineares, com mequações e n variáveis, dado da seguinte forma:
a11x1 + a12x2 + . . .+ a1nxn = b1a21x1 + a22x2 + . . .+ a2nxn = b2
...
am1x1 + am2x2 + . . .+ amnxn = bm
Os números a11, a21, . . . , am1 são ditos coe�cientes da viriável x1, e assim
por diante. Os números b1, b2, . . . , bm são ditos termos independentes.
Laura Goulart (UESB) Sistemas Lineares 4 de Dezembro de 2018 2 / 1

Laura Goulart (UESB) Sistemas Lineares 4 de Dezembro de 2018 3 / 1
Exemplo (6.1) x + 2y − 3z = 7
3x − y + 2z = −12x + y + z = 0
(1)
A solução de um sistema linear é um conjunto de números que é a solução
de todas as equações lineares.
Observe que x = 0, y = 1 e z = −1 satisfaz a 3a. equação do sistema,
mas não as outras equações. Ou seja, x = 0, y = 1 e z = −1 não é
solução do sistema. Porém, x = 1, y = 0 e z = −2 satisfaz,
simultaneamente, todas as equações do sistema. Portanto, x = 1, y = 0 e
z = −2 é solução do sistema (1).
Laura Goulart (UESB) Sistemas Lineares 4 de Dezembro de 2018 4 / 1
Exemplo (6.1) x + 2y − 3z = 7
3x − y + 2z = −12x + y + z = 0
(1)
A solução de um sistema linear é um conjunto de números que é a solução
de todas as equações lineares.
Observe que x = 0, y = 1 e z = −1 satisfaz a 3a. equação do sistema,
mas não as outras equações. Ou seja, x = 0, y = 1 e z = −1 não é
solução do sistema. Porém, x = 1, y = 0 e z = −2 satisfaz,
simultaneamente, todas as equações do sistema. Portanto, x = 1, y = 0 e
z = −2 é solução do sistema (1).
Laura Goulart (UESB) Sistemas Lineares 4 de Dezembro de 2018 4 / 1
Exemplo (6.1) x + 2y − 3z = 7
3x − y + 2z = −12x + y + z = 0
(1)
A solução de um sistema linear é um conjunto de números que é a solução
de todas as equações lineares.
Observe que x = 0, y = 1 e z = −1 satisfaz a 3a. equação do sistema,
mas não as outras equações. Ou seja, x = 0, y = 1 e z = −1 não é
solução do sistema. Porém, x = 1, y = 0 e z = −2 satisfaz,
simultaneamente, todas as equações do sistema. Portanto, x = 1, y = 0 e
z = −2 é solução do sistema (1).
Laura Goulart (UESB) Sistemas Lineares 4 de Dezembro de 2018 4 / 1
6.1-Classi�cação
Os sistemas lineares podem ser classi�cados conforme o número de
soluções possíveis.
6.1.1-Sistemas linear possível e determinado(SPD) Um sistema linear é
dito possível e determinado quando admite uma única
solução.
Exemplo (6.2) {x − y = 2
x + y = 0⇒ x = 1 e y = −1
Laura Goulart (UESB) Sistemas Lineares 4 de Dezembro de 2018 5 / 1
6.1-Classi�cação
Os sistemas lineares podem ser classi�cados conforme o número de
soluções possíveis.
6.1.1-Sistemas linear possível e determinado(SPD) Um sistema linear é
dito possível e determinado quando admite uma única
solução.
Exemplo (6.2) {x − y = 2
x + y = 0⇒ x = 1 e y = −1
Laura Goulart (UESB) Sistemas Lineares 4 de Dezembro de 2018 5 / 1

6.1.2-Sistema linear possível e indeterminado(SPI) Um sistema linear é
dito possível e determinado quando admite in�nitas soluções.
Exemplo (6.3) {x − y = 2
2x − 2y = 4x = 2+ y
Laura Goulart (UESB) Sistemas Lineares 4 de Dezembro de 2018 6 / 1
6.1.2-Sistema linear possível e indeterminado(SPI) Um sistema linear é
dito possível e determinado quando admite in�nitas soluções.
Exemplo (6.3) {x − y = 2
2x − 2y = 4
x = 2+ y
Laura Goulart (UESB) Sistemas Lineares 4 de Dezembro de 2018 6 / 1
6.1.2-Sistema linear possível e indeterminado(SPI) Um sistema linear é
dito possível e determinado quando admite in�nitas soluções.
Exemplo (6.3) {x − y = 2
2x − 2y = 4x = 2+ y
Laura Goulart (UESB) Sistemas Lineares 4 de Dezembro de 2018 6 / 1
6.1.3-Sistema linear impossível(SI) Um sistema linear é dito sistema
impossível quando não existe solução.
Exemplo (6.4) {x − y = 0
x − y = 1⇒ 0 = 1(abs!)
Laura Goulart (UESB) Sistemas Lineares 4 de Dezembro de 2018 7 / 1
6.1.3-Sistema linear impossível(SI) Um sistema linear é dito sistema
impossível quando não existe solução.
Exemplo (6.4) {x − y = 0
x − y = 1
⇒ 0 = 1(abs!)
Laura Goulart (UESB) Sistemas Lineares 4 de Dezembro de 2018 7 / 1
6.1.3-Sistema linear impossível(SI) Um sistema linear é dito sistema
impossível quando não existe solução.
Exemplo (6.4) {x − y = 0
x − y = 1⇒ 0 = 1(abs!)
Laura Goulart (UESB) Sistemas Lineares 4 de Dezembro de 2018 7 / 1
6.2-Sistema homogêneo
Quando num sistema linear os termos independentes são todos nulos, o
sistema é chamado homogêneo.
Exemplo (6.5) {3x + 6y = 0
2x + 4y = 0⇒ x = −2y .
Observação (6.1)
Todo sistema homogêneo tem, pelo menos, como solução
x1 = x2 = . . . = xn = 0 chamada solução trivial.
Contudo, no exemplo 6.5 temos um SPI, ou seja, teremos outras soluções
além da trivial chamadas de soluções não triviais.
Laura Goulart (UESB) Sistemas Lineares 4 de Dezembro de 2018 8 / 1
6.2-Sistema homogêneo
Quando num sistema linear os termos independentes são todos nulos, o
sistema é chamado homogêneo.
Exemplo (6.5) {3x + 6y = 0
2x + 4y = 0
⇒ x = −2y .
Observação (6.1)
Todo sistema homogêneo tem, pelo menos, como solução
x1 = x2 = . . . = xn = 0 chamada solução trivial.
Contudo, no exemplo 6.5 temos um SPI, ou seja, teremos outras soluções
além da trivial chamadas de soluções não triviais.
Laura Goulart (UESB) Sistemas Lineares 4 de Dezembro de 2018 8 / 1
6.2-Sistema homogêneo
Quando num sistema linear os termos independentes são todos nulos, o
sistema é chamado homogêneo.
Exemplo (6.5) {3x + 6y = 0
2x + 4y = 0⇒ x = −2y .
Observação (6.1)
Todo sistema homogêneo tem, pelo menos, como solução
x1 = x2 = . . . = xn = 0 chamada solução trivial.
Contudo, no exemplo 6.5 temos um SPI, ou seja, teremos outras soluções
além da trivial chamadas de soluções não triviais.
Laura Goulart (UESB) Sistemas Lineares 4 de Dezembro de 2018 8 / 1
6.2-Sistema homogêneo
Quando num sistema linear os termos independentes são todos nulos, o
sistema é chamado homogêneo.
Exemplo (6.5) {3x + 6y = 0
2x + 4y = 0⇒ x = −2y .
Observação (6.1)
Todo sistema homogêneo tem, pelo menos, como solução
x1 = x2 = . . . = xn = 0 chamada solução trivial.
Contudo, no exemplo 6.5 temos um SPI, ou seja, teremos outras soluções
além da trivial chamadas de soluções não triviais.
Laura Goulart (UESB) Sistemas Lineares 4 de Dezembro de 2018 8 / 1
6.2-Sistema homogêneo
Quando num sistema linear os termos independentes são todos nulos, o
sistema é chamado homogêneo.
Exemplo (6.5) {3x + 6y = 0
2x + 4y = 0⇒ x = −2y .
Observação (6.1)
Todo sistema homogêneo tem, pelo menos, como solução
x1 = x2 = . . . = xn = 0 chamada solução trivial.
Contudo, no exemplo 6.5 temos um SPI, ou seja, teremos outras soluções
além da trivial chamadas de soluções não triviais.
Laura Goulart (UESB) Sistemas Lineares 4 de Dezembro de 2018 8 / 1
6.3-Representação matricial de um sistema
O estudo da resolução de sistemas lineares pode ser facilicitado se
aplicarmos os nossos conhecimentos sobre matrizes.
Considere o sistema linear
a11x1 + a12x2 + . . .+ a1nxn = b1a21x1 + a22x2 + . . .+ a2nxn = b2
...
am1x1 + am2x2 + . . .+ amnxn = bm
.
Laura Goulart (UESB) Sistemas Lineares 4 de Dezembro de 2018 9 / 1
6.3-Representação matricial de um sistema
O estudo da resolução de sistemas lineares pode ser facilicitado se
aplicarmos os nossos conhecimentos sobre matrizes.
Considere o sistema linear
a11x1 + a12x2 + . . .+ a1nxn = b1a21x1 + a22x2 + . . .+ a2nxn = b2
...
am1x1 + am2x2 + . . .+ amnxn = bm
.
Laura Goulart (UESB) Sistemas Lineares 4 de Dezembro de 2018 9 / 1
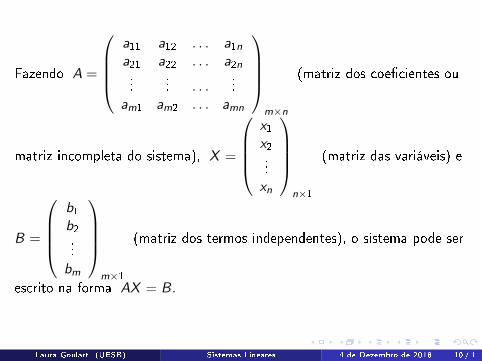
Fazendo A =
a11 a12 . . . a1na21 a22 . . . a2n...
... . . ....
am1 am2 . . . amn
m×n
(matriz dos coe�cientes ou
matriz incompleta do sistema), X =
x1x2...
xn
n×1
(matriz das variáveis) e
B =
b1b2...
bm
m×1
(matriz dos termos independentes), o sistema pode ser
escrito na forma AX = B.
Laura Goulart (UESB) Sistemas Lineares 4 de Dezembro de 2018 10 / 1
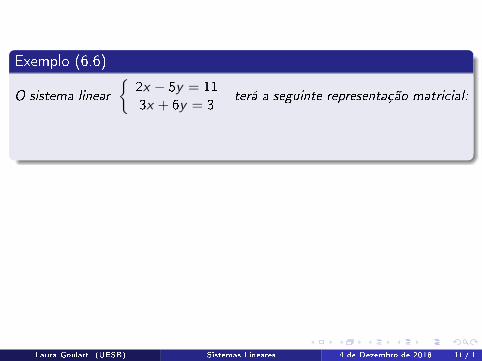
Exemplo (6.6)
O sistema linear
{2x − 5y = 11
3x + 6y = 3terá a seguinte representação matricial:
(2 −53 6
)·(
xy
)=
(11
3
)
Observação (6.2)
A matriz completa de um sistema linear é aquela formada pelos
coe�cientes mais os termos independentes.
No exemplo 6.6, teríamos que a matriz completa é C =
(2 −5 11
3 6 3
).
Laura Goulart (UESB) Sistemas Lineares 4 de Dezembro de 2018 11 / 1
Exemplo (6.6)
O sistema linear
{2x − 5y = 11
3x + 6y = 3terá a seguinte representação matricial:(
2 −53 6
)·(
xy
)=
(11
3
)
Observação (6.2)
A matriz completa de um sistema linear é aquela formada pelos
coe�cientes mais os termos independentes.
No exemplo 6.6, teríamos que a matriz completa é C =
(2 −5 11
3 6 3
).
Laura Goulart (UESB) Sistemas Lineares 4 de Dezembro de 2018 11 / 1
Exemplo (6.6)
O sistema linear
{2x − 5y = 11
3x + 6y = 3terá a seguinte representação matricial:(
2 −53 6
)·(
xy
)=
(11
3
)
Observação (6.2)
A matriz completa de um sistema linear é aquela formada pelos
coe�cientes mais os termos independentes.
No exemplo 6.6, teríamos que a matriz completa é C =
(2 −5 11
3 6 3
).
Laura Goulart (UESB) Sistemas Lineares 4 de Dezembro de 2018 11 / 1

Exemplo (6.6)
O sistema linear
{2x − 5y = 11
3x + 6y = 3terá a seguinte representação matricial:(
2 −53 6
)·(
xy
)=
(11
3
)
Observação (6.2)
A matriz completa de um sistema linear é aquela formada pelos
coe�cientes mais os termos independentes.
No exemplo 6.6, teríamos que a matriz completa é C =
(2 −5 11
3 6 3
).
Laura Goulart (UESB) Sistemas Lineares 4 de Dezembro de 2018 11 / 1
6.4-Regra de Cramer
Essa relação entre sistemas lineares e matriz fora estabelecida no intuito de
determinar a solução de um sistema linear atráves de técnicas envolvendo o
cálculo de determinantes. Para isso, vamos considerar que m = n, ie, os
sistemas lineares estudados aqui terão o núemro de vairáveis igual ao
número de equações.
O determinante da matriz dos coe�cientes de um sistema linear é dito
determinante principal e denotado por D.Ao substituirmos uma coluna j da matriz dos coe�cientes pelos termos
independentes obteremos o chamado determinante secundário e
denotado por Dxj .
Laura Goulart (UESB) Sistemas Lineares 4 de Dezembro de 2018 12 / 1
6.4-Regra de Cramer
Essa relação entre sistemas lineares e matriz fora estabelecida no intuito de
determinar a solução de um sistema linear atráves de técnicas envolvendo o
cálculo de determinantes. Para isso, vamos considerar que m = n, ie, os
sistemas lineares estudados aqui terão o núemro de vairáveis igual ao
número de equações.
O determinante da matriz dos coe�cientes de um sistema linear é dito
determinante principal e denotado por D.
Ao substituirmos uma coluna j da matriz dos coe�cientes pelos termos
independentes obteremos o chamado determinante secundário e
denotado por Dxj .
Laura Goulart (UESB) Sistemas Lineares 4 de Dezembro de 2018 12 / 1
6.4-Regra de Cramer
Essa relação entre sistemas lineares e matriz fora estabelecida no intuito de
determinar a solução de um sistema linear atráves de técnicas envolvendo o
cálculo de determinantes. Para isso, vamos considerar que m = n, ie, os
sistemas lineares estudados aqui terão o núemro de vairáveis igual ao
número de equações.
O determinante da matriz dos coe�cientes de um sistema linear é dito
determinante principal e denotado por D.Ao substituirmos uma coluna j da matriz dos coe�cientes pelos termos
independentes obteremos o chamado determinante secundário e
denotado por Dxj .
Laura Goulart (UESB) Sistemas Lineares 4 de Dezembro de 2018 12 / 1
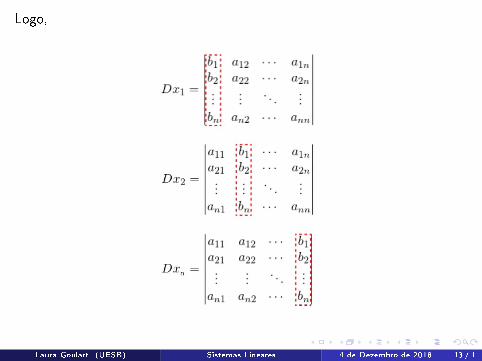
Logo,
Laura Goulart (UESB) Sistemas Lineares 4 de Dezembro de 2018 13 / 1
A regra de Cramer diz que a solução é dada por xj =Dxj
D, para
j = 1, . . . , n.
Laura Goulart (UESB) Sistemas Lineares 4 de Dezembro de 2018 14 / 1
Observação 6.3
Para usarmos a regra de Cramer é necessário que D 6= 0 e teremos um
SPD.
Caso D = 0, podemos ter um SPI ou um SI. Assim, para saber qual é a
classi�cação correta será necessário olharmos para os determinantes
secundários.
i) D = 0 e Dxj = 0,∀j = 1, . . . , n⇒ SPI .
ii) D = 0 e Dxj 6= 0 para algum j ∈ {1, . . . , n} ⇒ SI .
Laura Goulart (UESB) Sistemas Lineares 4 de Dezembro de 2018 15 / 1
Observação 6.3
Para usarmos a regra de Cramer é necessário que D 6= 0 e teremos um
SPD.
Caso D = 0, podemos ter um SPI ou um SI. Assim, para saber qual é a
classi�cação correta será necessário olharmos para os determinantes
secundários.
i) D = 0 e Dxj = 0,∀j = 1, . . . , n⇒ SPI .
ii) D = 0 e Dxj 6= 0 para algum j ∈ {1, . . . , n} ⇒ SI .
Laura Goulart (UESB) Sistemas Lineares 4 de Dezembro de 2018 15 / 1
Observação 6.3
Para usarmos a regra de Cramer é necessário que D 6= 0 e teremos um
SPD.
Caso D = 0, podemos ter um SPI ou um SI. Assim, para saber qual é a
classi�cação correta será necessário olharmos para os determinantes
secundários.
i) D = 0 e Dxj = 0,∀j = 1, . . . , n⇒ SPI .
ii) D = 0 e Dxj 6= 0 para algum j ∈ {1, . . . , n} ⇒ SI .
Laura Goulart (UESB) Sistemas Lineares 4 de Dezembro de 2018 15 / 1
Observação 6.3
Para usarmos a regra de Cramer é necessário que D 6= 0 e teremos um
SPD.
Caso D = 0, podemos ter um SPI ou um SI. Assim, para saber qual é a
classi�cação correta será necessário olharmos para os determinantes
secundários.
i) D = 0 e Dxj = 0,∀j = 1, . . . , n⇒ SPI .
ii) D = 0 e Dxj 6= 0 para algum j ∈ {1, . . . , n} ⇒ SI .
Laura Goulart (UESB) Sistemas Lineares 4 de Dezembro de 2018 15 / 1
Exemplo 6.7
Resolva o sistema linear
x − 2y − 2z = −1x − y + z = −22x + y + 3z = 1
pela regra de Cramer.
Laura Goulart (UESB) Sistemas Lineares 4 de Dezembro de 2018 16 / 1